
Torsional Vibration Characterization of Hybrid Power Systems via Disturbance Observer and Partitioned Learning


Abstract
1. Introduction
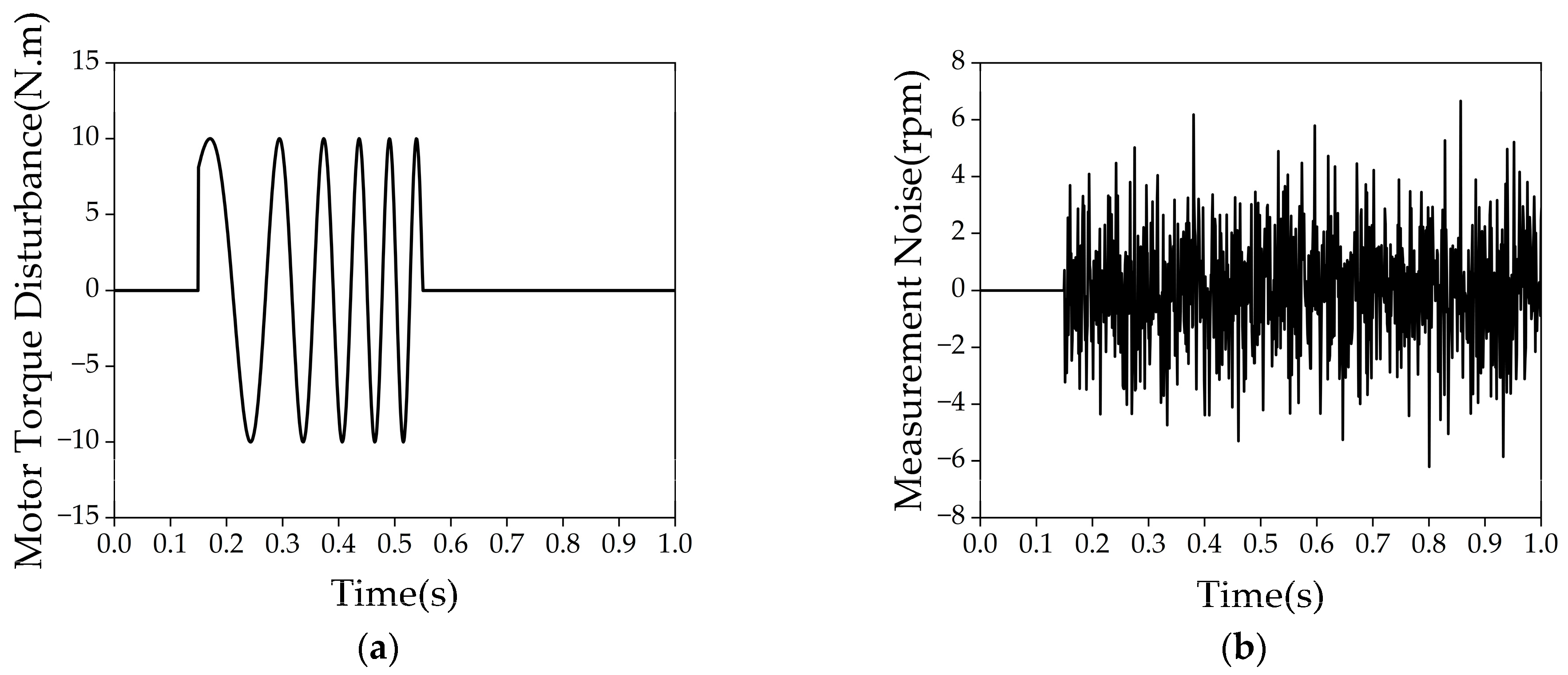
- The unmodeled components, such as engine torque, are incorporated as disturbance states and embedded into a Kalman observer framework to compute the observer gain, enabling effective estimation of the torque at the torsional damper.
- A continuous wavelet transform is applied to the estimated torsional damper torque signal to extract its time-frequency features, thereby identifying the frequency-domain characteristics of transient torsional vibrations.
- Based on a shafting rotational dynamics model and a natural frequency model, structural parameters within the observer framework are estimated.
2. Materials and Methods
2.1. Drivetrain System Model
- Engine Assembly: The crankshaft, connecting rod-piston mechanism, and accessories are simplified as an equivalent rotational inertia element. This approach is justified by the relatively uniform mass distribution of rotating components and the negligible periodic influence of the connecting rod-piston mechanism on the system’s rotational inertia.
- Dual-Mass Flywheel: Modeled as two interconnected inertia elements (primary and secondary mass blocks), linked through a torsional spring-damper system. This configuration effectively buffers engine torque fluctuations and mitigates drivetrain vibrations.
- Intermediate Shaft Assembly: The shaft segment between the dual-mass flywheel’s driven side and the clutch (including intermediate drive shafts and gears) is reduced to a single inertia element.
- Motor Shaft System: The shaft section between the gear engagement point and motor side is represented as an inertia element to capture drivetrain path flexibility.
- Motor Rotor: Due to its substantial rotational inertia, the rotor is modeled as a lumped inertia element to accurately reflect its dynamic role in torsional vibration responses.
2.2. Disturbance-Observer-Based Algorithm
2.2.1. Observation-Oriented Model
- The position of the torsional damper on the transmission shaft exhibits significant nonlinear characteristics, and its torque is a state that must be observed in this study. Therefore, this position is equivalent to a shaft segment with stiffness Keq.
- The left section of the torsional damper (including the engine and the main mass block) is equivalent to a point mass with inertia JICE.
- The right section of the torsional damper (including the driven mass block, engine assembly shaft, motor assembly shaft, and the motor) is equivalent to a point mass with inertia JISG, with the excitation torque TISG acting on JISG.
- Disturbance variables f are introduced into the model, where the disturbances consist of two main components. One is the external disturbance, primarily from the transient engine output torque that cannot be measured by sensors. The other is the internal disturbance, arising from changes in damping torque caused by uncertainties in the damper, gears, and factors such as friction and lubrication conditions. These factors are difficult to describe using the observation-oriented mathematical model. Therefore, by introducing the disturbance variable f, the model’s prediction accuracy is improved to some extent.The simplified model is shown in Figure 7.
2.2.2. Design of the Extended State Kalman Filter
2.3. Transient Frequency Domain Feature Identification
- The rotational speeds of the engine and motor are collected, and the torsional damper torque signal is obtained using an ESKF observer.
- During the engine start-up process, the torsional damper torque signal is sampled in real time at a fixed rate until the start-up process is complete.
- In the idle period following engine start-up, the CWT is applied to extract the resonance features from the torque signal. This approach alleviates the computational load of online algorithms while ensuring accurate identification of torsional vibration characteristics.
- The extracted amplitude-frequency features are then utilized in parameter learning algorithms and subsequent torsional vibration suppression algorithms to optimize system performance.
2.4. Partition-Based Hybrid Parameter Learning Algorithm
- Perform time-frequency analysis on the torque signal of the torsional damper using CWT to extract resonance frequency features.
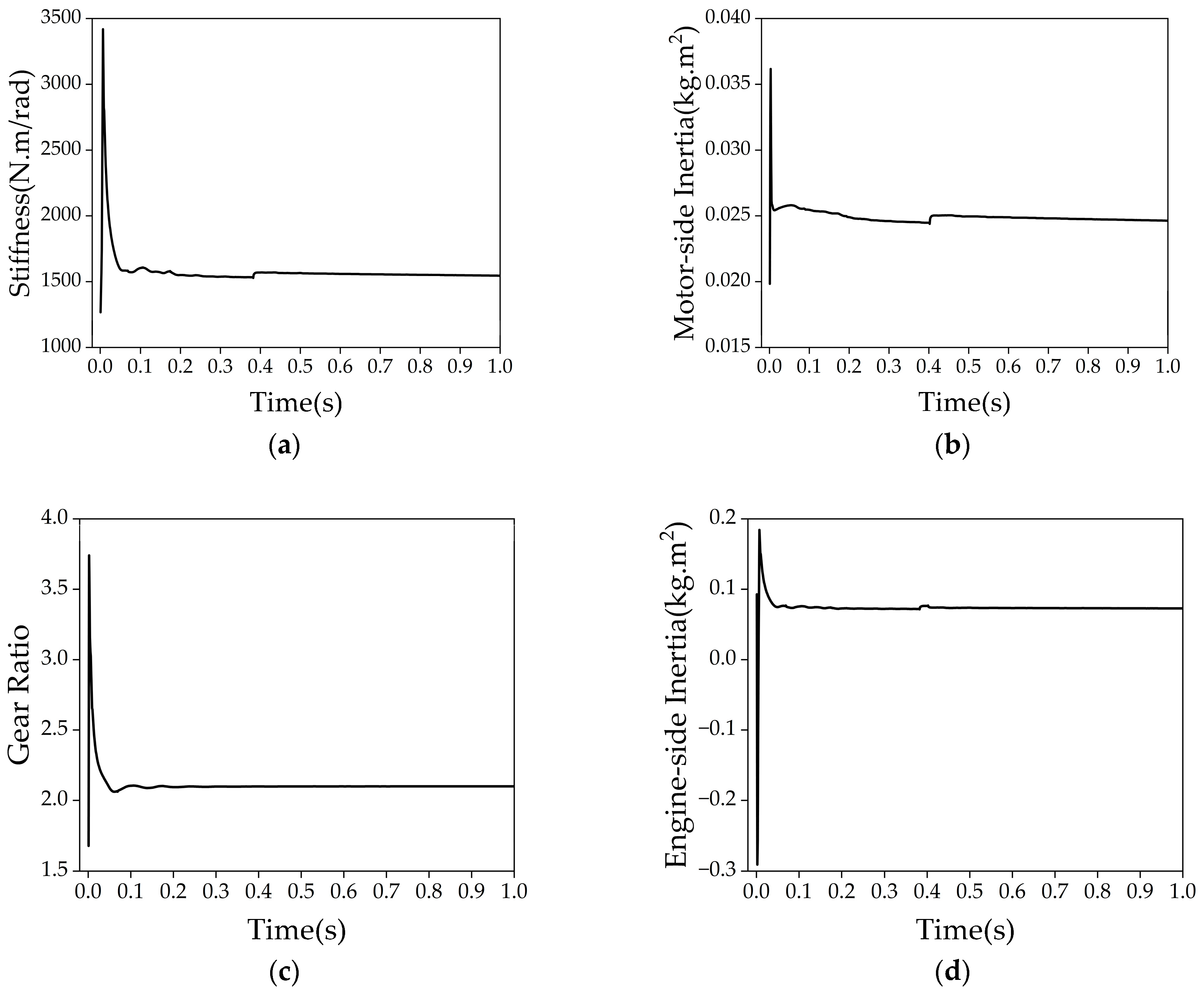
- Based on the torsional dynamics model, apply the least squares method to estimate three key dynamic parameters: equivalent stiffness, motor-side rotational inertia, and transmission ratio.
- Combine the parameters obtained in Step 2 with the resonance frequency identified via CWT and substitute them into the system’s natural frequency model to further estimate the engine-side rotational inertia.
3. Results
3.1. Model Validation
3.2. Observer Performance Validation
3.3. Parameter Learning Algorithm Validation
3.4. Validation of Transient Frequency-Domain Feature Identification
3.5. Limitations and Future Work
4. Discussion
5. Conclusions
- Time-domain response and frequency-domain modal analysis of the powertrain system are conducted. When the excitation frequency approaches the natural frequencies of the system, resonance is likely to occur, leading to significant torsional vibrations in the torsional damper torque signal.
- A six-degree-of-freedom (DOF) rotational dynamic model of the drivetrain is simplified to a two-DOF observer-oriented model under reasonable assumptions. An extended state Kalman filter (ESKF) is constructed by incorporating engine torque and unmodeled disturbances into the augmented state vector, and the observer gain is obtained within a Kalman filtering framework. For validation, an H2-optimal LMI-based observer is designed for performance comparison. To address parameter uncertainty in the system, a parameter partition learning approach is proposed based on sensor layout, the developed two-DOF dynamic model, and modal characteristics. Simulation results show that, under input disturbance and sensor noise, the RMSE of the LMI observer is 10.16 N·m, while the ESKF achieves an RMSE of 22.28 N·m, representing a 77.56% improvement in estimation accuracy. Furthermore, when structural parameters are perturbed by 20%, the fixed-parameter observer model fails to accurately estimate the torsional damper torque, resulting in an RMSE of 15.99 N.m. In contrast, with the integration of the parameter self-learning algorithm, the observer accurately tracks the actual torque variations, reducing the RMSE to 2.36 N.m—a relative improvement of 85.2%. These results verify the effectiveness and robustness of the ESKF and parameter learning strategies in enhancing torque estimation accuracy.
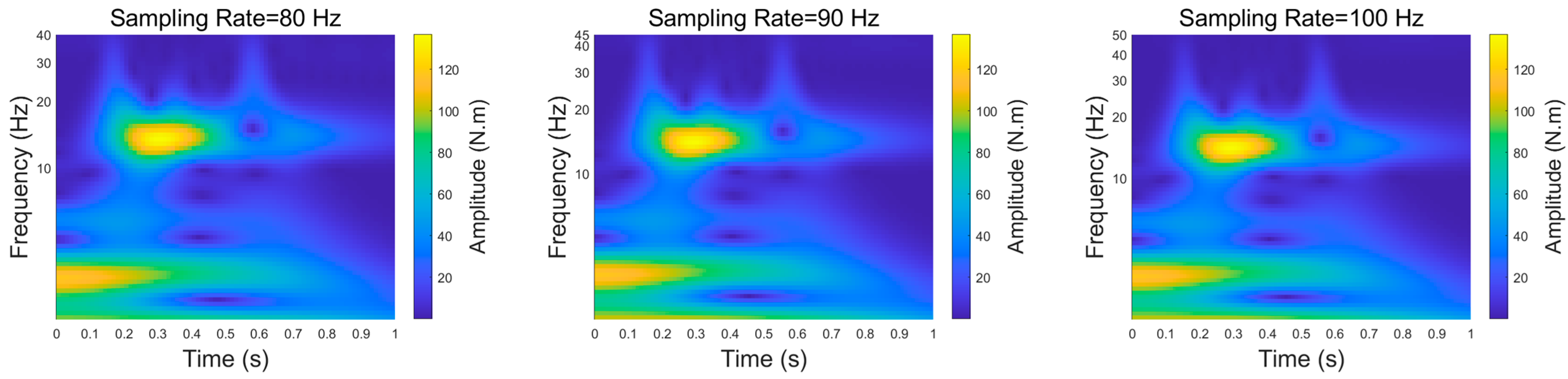
- The time-varying frequency characteristics of the non-stationary torsional damper torque signal are analyzed. By evaluating the impact of the mother wavelet, voices per octave (VPO), and sampling rate in continuous wavelet transform (CWT), a balance between accuracy, memory usage, and computational efficiency is achieved. Results indicate that the Morlet wavelet demonstrates excellent time-frequency localization. With a VPO of 15 and a sampling rate of 50 Hz, the identified torsional resonance frequency range is [14.3587, 15.0378] Hz, with a peak at 14.698 Hz—only a 1.1% deviation from the actual natural frequency of 14.53 Hz. This confirms the effectiveness of CWT in capturing transient frequency-domain features of non-stationary torque signals. The findings lay a theoretical foundation for subsequent control strategies aimed at torsional vibration suppression and powertrain system optimization.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bellocchi, S.; Klöckner, K.; Manno, M.; Noussan, M.; Vellini, M. On the role of electric vehicles towards low-carbon energy systems: Italy and Germany in comparison. Appl. Energy 2019, 255, 113848. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, B.; Yang, Y.; Lei, Z.; Zhang, Y.; Chen, Z. Hierarchical speed planning and energy management for autonomous plug-in hybrid electric vehicle in vehicle-following environment. Energy 2022, 260, 125212. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, S.; Shen, S.; Liu, Y.; Guo, F.; Zhang, Y. Co-optimization of velocity planning and energy management for autonomous plug-in hybrid electric vehicles in urban driving scenarios. Energy 2023, 263, 126060. [Google Scholar] [CrossRef]
- Ma, S.C.; Xu, J.H.; Fan, Y. Characteristics and key trends of global electric vehicle technology development: A multi-method patent analysis. J. Clean. Prod. 2022, 338, 130502. [Google Scholar] [CrossRef]
- Qin, Y.; Tang, X.; Jia, T.; Duan, Z.; Zhang, J.; Li, Y.; Zheng, L. Noise and vibration suppression in hybrid electric vehicles: State of the art and challenges. Renew. Sustain. Energy Rev. 2020, 124, 109782. [Google Scholar] [CrossRef]
- Su, Y.; Hu, M.; Huang, J.; Qin, D.; Fu, C.; Zhang, Y. Dynamic torque coordinated control considering engine starting conditions for a power-split plug-in hybrid electric vehicle. Appl. Sci. 2021, 11, 2085. [Google Scholar] [CrossRef]
- Wu, H.; Wu, G. Driveline torsional analysis and clutch damper optimization for reducing gear rattle. Shock Vib. 2016, 2016, 8434625. [Google Scholar] [CrossRef]
- Pettersson, M.; Nielsen, L.; Hedström, L.G. Transmission-torque control for gear shifting with engine control. SAE Trans. 1997, 106, 1265–1275. [Google Scholar]
- Pettersson, M.; Nielsen, L. Gear shifting by engine control. IEEE Trans. Control Syst. Technol. 2000, 8, 495–507. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Z.; Yu, H.; Cheng, H.; Wang, C. Analysis and Control on Vibration Resulted from Engine Start of Hybrid Electric Vehicle. Automot. Eng. 2019, 41, 184–190. [Google Scholar]
- Park, J.; Choi, S.; Oh, J.; Eo, J. Adaptive torque tracking control during slip engagement of a dry clutch in vehicle powertrain. Mech. Mach. Theory 2019, 134, 249–266. [Google Scholar] [CrossRef]
- Shi, J.; Li, L.; Wang, X.; Liu, C. Robust output feedback controller with high-gain observer for automatic clutch. Mech. Syst. Signal Process. 2019, 132, 806–822. [Google Scholar] [CrossRef]
- Geng, X.; Liu, W.; Liu, X.; Wen, G.; Xue, M.; Wang, J. Optimal Torque Control of the Launching Process with AMT Clutch for Heavy-Duty Vehicles. Machines 2024, 12, 363. [Google Scholar] [CrossRef]
- Gao, B.; Hong, J.; Qu, T.; Yu, S.; Chen, H. An output regulator with rejection of time-varying disturbance: Experimental validation on clutch slip control. IEEE Trans. Control Syst. Technol. 2019, 28, 1158–1167. [Google Scholar] [CrossRef]
- Morandin, M.; Bolognani, S.; Faggion, A. Active torque damping for an ICE-based domestic CHP system with an SPM machine drive. IEEE Trans. Ind. Appl. 2015, 51, 3137–3146. [Google Scholar] [CrossRef]
- Cai, Y.; Dou, L.; Chen, L.; Shi, D.; Wang, S.; Zhu, Z. Research on Coordinated Control of Hybrid Electric Vehicle Based on Compensation Sliding Mode Control. Automot. Eng. 2020, 42, 431–438. [Google Scholar]
- Tang, X.; Zhang, D.; Liu, T.; Khajepour, A.; Yu, H.; Wang, H. Research on the energy control of a dual-motor hybrid vehicle during engine start-stop process. Energy 2019, 166, 1181–1193. [Google Scholar] [CrossRef]
- Su, Y.; Su, L.; Hu, M.; Qin, D.; Fu, C.; Yu, H. Modeling and dynamic response analysis of a compound power-split hybrid electric vehicle during the engine starting process. IEEE Access 2020, 8, 186585–186598. [Google Scholar] [CrossRef]
- Geng, Y.; Chen, R.; Yang, S.; Zhou, T.; Shao, Y.; Dai, W. Research on Mode Switching Vibration Suppression Strategy of Hybrid Electric Vehicle With Active Motor Response. IEEE Trans. Transp. Electrif. 2024, 11, 5470–5483. [Google Scholar] [CrossRef]
- Park, J.; Choi, S.; Oh, J.; Eo, J. Adaptive slip engagement control of a wet clutch in vehicle powertrain based on transmitted torque estimation. Mech. Syst. Signal Process. 2022, 171, 108861. [Google Scholar] [CrossRef]
- Lin, C.; Sun, S.; Yi, J.; Walker, P.; Zhang, N. Accelerated adaptive super twisting sliding mode observer-based drive shaft torque estimation for electric vehicle with automated manual transmission. IET Intell. Transp. Syst. 2019, 13, 160–167. [Google Scholar] [CrossRef]
- Na, J.; Chen, A.S.; Herrmann, G.; Burke, R.; Brace, C. Vehicle engine torque estimation via unknown input observer and adaptive parameter estimation. IEEE Trans. Veh. Technol. 2017, 67, 409–422. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, J.; Gao, J.; Yu, H.; Liu, D. Clutch pressure estimation for a power-split hybrid transmission using nonlinear robust observer. Mech. Syst. Signal Process. 2018, 106, 249–264. [Google Scholar] [CrossRef]
- Oh, J.J.; Choi, S.B.; Kim, J. Driveline modeling and estimation of individual clutch torque during gear shifts for dual clutch transmission. Mechatronics 2014, 24, 449–463. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, J.; Zhou, B.; Yu, H. Robust hierarchical estimator of clutch torques for a compound power-split hybrid electric vehicle. Mech. Syst. Signal Process. 2019, 134, 106320. [Google Scholar] [CrossRef]
- Li, M.; Zhao, Z.; Fan, J.; Gao, J. Estimation of transmission input & output shaft torque and drive wheel speed for compound power split powertrain based on unknown input observer. IEEE Trans. Veh. Technol. 2020, 69, 4883–4893. [Google Scholar]
- Kim, S.; Lee, H.; Kim, J.; Park, G. Online adaptive identification of clutch torque transmissibility for the drivability consistency of high-performance production vehicles. Control Eng. Pract. 2024, 147, 105926. [Google Scholar] [CrossRef]
- Mousavi, M.S.R.; Alizadeh, H.V.; Boulet, B. Estimation of synchromesh frictional torque and output torque in a clutchless automated manual transmission of a parallel hybrid electric vehicle. IEEE Trans. Veh. Technol. 2016, 66, 5531–5539. [Google Scholar] [CrossRef]
- Mousavi, M.S.R.; Boulet, B. Dynamical Modeling and Optimal State Estimation Using Kalman-Bucy Filter for a Seamless Two-Speed Transmission for Electric Vehicles. In Proceedings of the 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015. [Google Scholar]
- Xue, Q.; Zhang, X.; Chen, H.; Yue, M.; Teng, T.; Yu, J. Dynamic coordinated control strategy of a dual-motor hybrid electric vehicle based on clutch friction torque observer. Heliyon 2024, 10, e27255. [Google Scholar] [CrossRef]
- Hao, H.; Lu, T.; Zhang, J.; Ding, W. Investigation on adaptive method of torque characteristic in dual clutch transmission during launch phase. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 568–584. [Google Scholar] [CrossRef]
- Zhao, Z.; He, L.; Yang, Y.; Wu, C.; Li, X.; Hedrick, J.K. Estimation of torque transmitted by clutch during shifting process for dry dual clutch transmission. Mech. Syst. Signal Process. 2016, 75, 413–433. [Google Scholar] [CrossRef]
- Liu, D.; Cheng, W.; Wen, W. Rolling bearing fault diagnosis via STFT and improved instantaneous frequency estimation method. Procedia Manuf. 2020, 49, 166–172. [Google Scholar] [CrossRef]
- Zhang, Q.; Deng, L. An intelligent fault diagnosis method of rolling bearings based on short-time Fourier transform and convolutional neural network. J. Fail. Anal. Prev. 2023, 23, 795–811. [Google Scholar] [CrossRef]
- Xiang, C.; Ren, Z.; Shi, P.; Zhao, H. Data-Driven Fault Diagnosis for Rolling Bearing Based on DIT-FFT and XGBoost. Complexity 2021, 2021, 4941966. [Google Scholar] [CrossRef]
- Chin, C.H.; Abdullah, S.; Ariffin, A.K.; Singh, S.S.K.; Arifin, A. A review of the wavelet transform for durability and structural health monitoring in automotive applications. Alex. Eng. J. 2024, 99, 204–216. [Google Scholar] [CrossRef]
- Verstraete, D.; Ferrada, A.; Droguett, E.L.; Meruane, V.; Modarres, M. Deep learning enabled fault diagnosis using time-frequency image analysis of rolling element bearings. Shock Vib. 2017, 2017, 5067651. [Google Scholar] [CrossRef]
- Chen, L.; Shi, W.; Chen, Z. Modeling of idle speed transmission based on unit modeling method and performance comparison of various torsional dampers. J. Cent. South Univ. (Sci. Technol.) 2020, 51, 842–852. [Google Scholar]
- Hu, Y.; Yang, F.; Du, L.; Zhang, J.; Ouyang, M. A novel method to actively damp the vibration of the hybrid powertrain by utilizing a flywheel integrated-starter-generator. IEEE Access 2020, 8, 147045–147058. [Google Scholar] [CrossRef]
- Zhong, B.; Hou, Z.; Liu, R. PID Control on the Torsional Vibration of an Auxiliary Power Unit During Starting. Automot. Eng. 2018, 40, 143–149. [Google Scholar]
- Wang, F.; Ye, P.; Xu, X.; Cai, Y.; Ni, S.; Que, H. Novel regenerative braking method for transient torsional oscillation suppression of planetary-gear electrical powertrain. Mech. Syst. Signal Process. 2022, 163, 108187. [Google Scholar] [CrossRef]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Prentice-Hall: Englewood Cliffs, NJ, USA, 1979; pp. 105–115. [Google Scholar]
- Ibrahim, M.; Jemei, S.; Wimmer, G.; Steiner, N.Y.; Kokonendji, C.C.; Hissel, D. Selection of mother wavelet and decomposition level for energy management in electrical vehicles including a fuel cell. Int. J. Hydrog. Energy 2015, 40, 15823–15833. [Google Scholar] [CrossRef]
- Yan, M.; Li, M.; He, H.; Peng, J.; Sun, C. Rule-based energy management for dual-source electric buses extracted by wavelet transform. J. Clean. Prod. 2018, 189, 116–127. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Item | Value |
|---|---|---|
| Engine | Bore/mm | 78.2 |
| Piston stroke/mm | 104 | |
| Displacement/L | 2.0 | |
| Compression ratio | 12 | |
| Piston mass/g | 160 | |
| Piston skirt length/mm | 39 | |
| Single connecting rod mass/g | 250 | |
| Connecting rod length/mm | 205 | |
| Average shaft diameter/mm | 50 | |
| Motor | Torque limit/N.m | 200 |
| Maximum rotational speed/rpm | 6000 | |
| Motor inertia/kg.m2 | 0.02 | |
| Gear | Backlash of drive gear/rad | 0.0175 |
| Transmission ratio | 2.1 | |
| Drive shaft system | Engine output shaft inertia/kg·m2 | 0.0136 |
| Damper primary limit angle/rad | 0.08 | |
| Damper secondary stiffness/N.m/rad | 1600 |
| Torsional Angle Range (rad) | First Order (Hz) | Second Order (Hz) | Third Order (Hz) | Fourth Order (Hz) | Fifth Order (Hz) | Sixth Order (Hz) |
|---|---|---|---|---|---|---|
| 0–0.08 | 0.08 | 13.6 | 398 | 415 | 736 | 1098 |
| 0.08–10 | 0.13 | 14.53 | 413 | 437 | 822 | 1135 |
| Parameters | Stiffness Keq (N·m/rad) | Motor-Side Inertia JISG (kg·m2) | Gear Ratio i | Engine-Side Inertia JICE (kg·m2) |
|---|---|---|---|---|
| True value | 1584.31 | 0.0248 | 2.1 | 0.078 |
| Identification value | 1535.77 | 0.02446 | 2.099 | 0.07242 |
| Identification accuracy (%) | 96.94% | 98.63% | 99.95% | 92.85% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, T.; Xie, H.; Liang, B. Torsional Vibration Characterization of Hybrid Power Systems via Disturbance Observer and Partitioned Learning. Energies 2025, 18, 2847. https://doi.org/10.3390/en18112847
Zheng T, Xie H, Liang B. Torsional Vibration Characterization of Hybrid Power Systems via Disturbance Observer and Partitioned Learning. Energies. 2025; 18(11):2847. https://doi.org/10.3390/en18112847
Chicago/Turabian StyleZheng, Tao, Hui Xie, and Boqiang Liang. 2025. "Torsional Vibration Characterization of Hybrid Power Systems via Disturbance Observer and Partitioned Learning" Energies 18, no. 11: 2847. https://doi.org/10.3390/en18112847
APA StyleZheng, T., Xie, H., & Liang, B. (2025). Torsional Vibration Characterization of Hybrid Power Systems via Disturbance Observer and Partitioned Learning. Energies, 18(11), 2847. https://doi.org/10.3390/en18112847