
Analysis of the Cogging Torque Reduction in Permanent Magnet Generators for a Very Low Wind Speed


Abstract
1. Introduction
2. Materials and Methods
2.1. The Cogging Torque in a Permanent Magnet Generator
- The machine utilizes a substantial volume of magnets.
- The height of the magnet is uniform from one end to the other.
- The proximity between the magnets and the stator teeth is minimal.
- The breadth of the entrance groove in the stator core is substantial.
- The ratio of the number of grooves to the number of magnetic poles is an integer (integral slot number).
- The remanent flux of the employed permanent magnets is elevated.
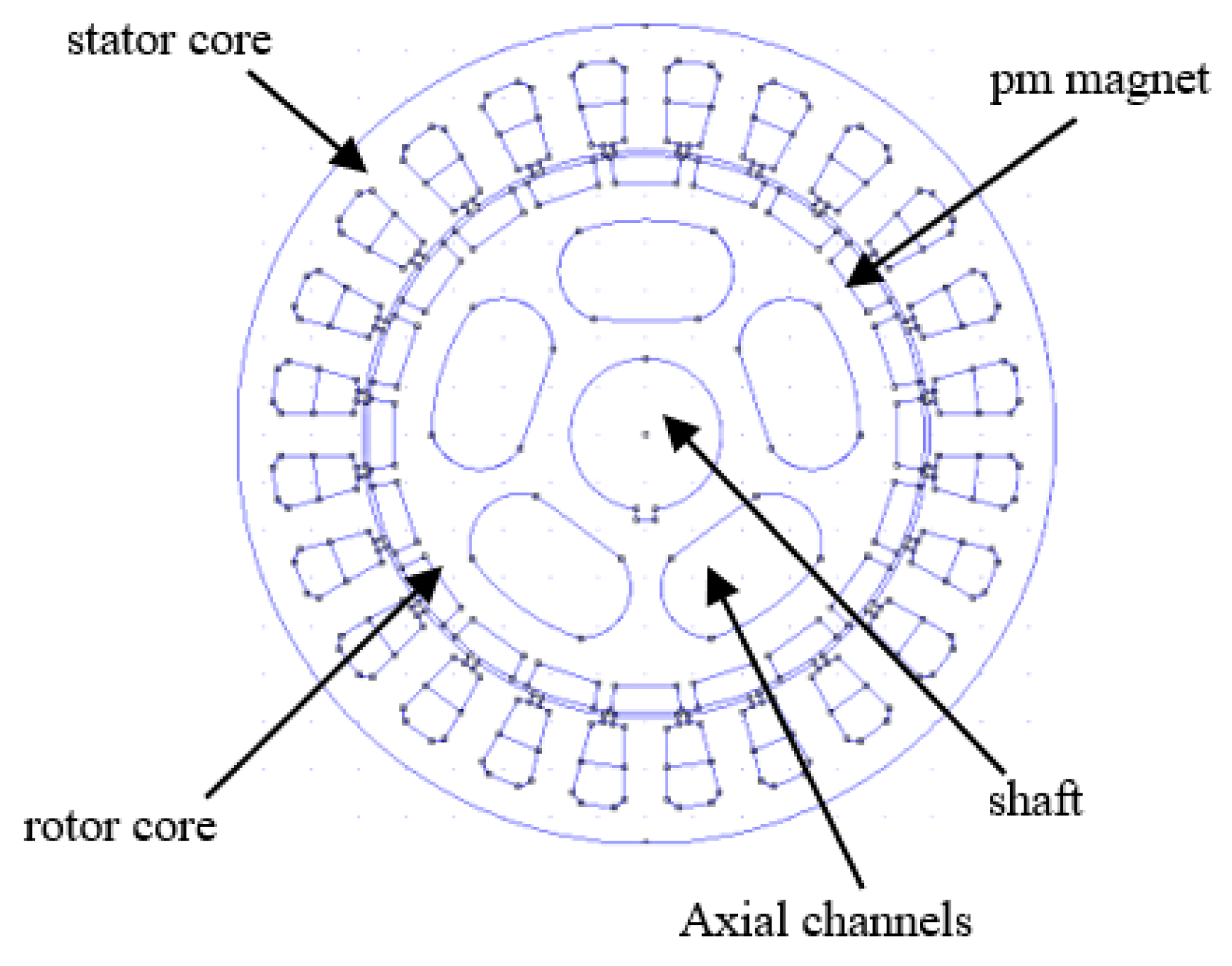
2.2. The Proposed Structure of PMG Studied
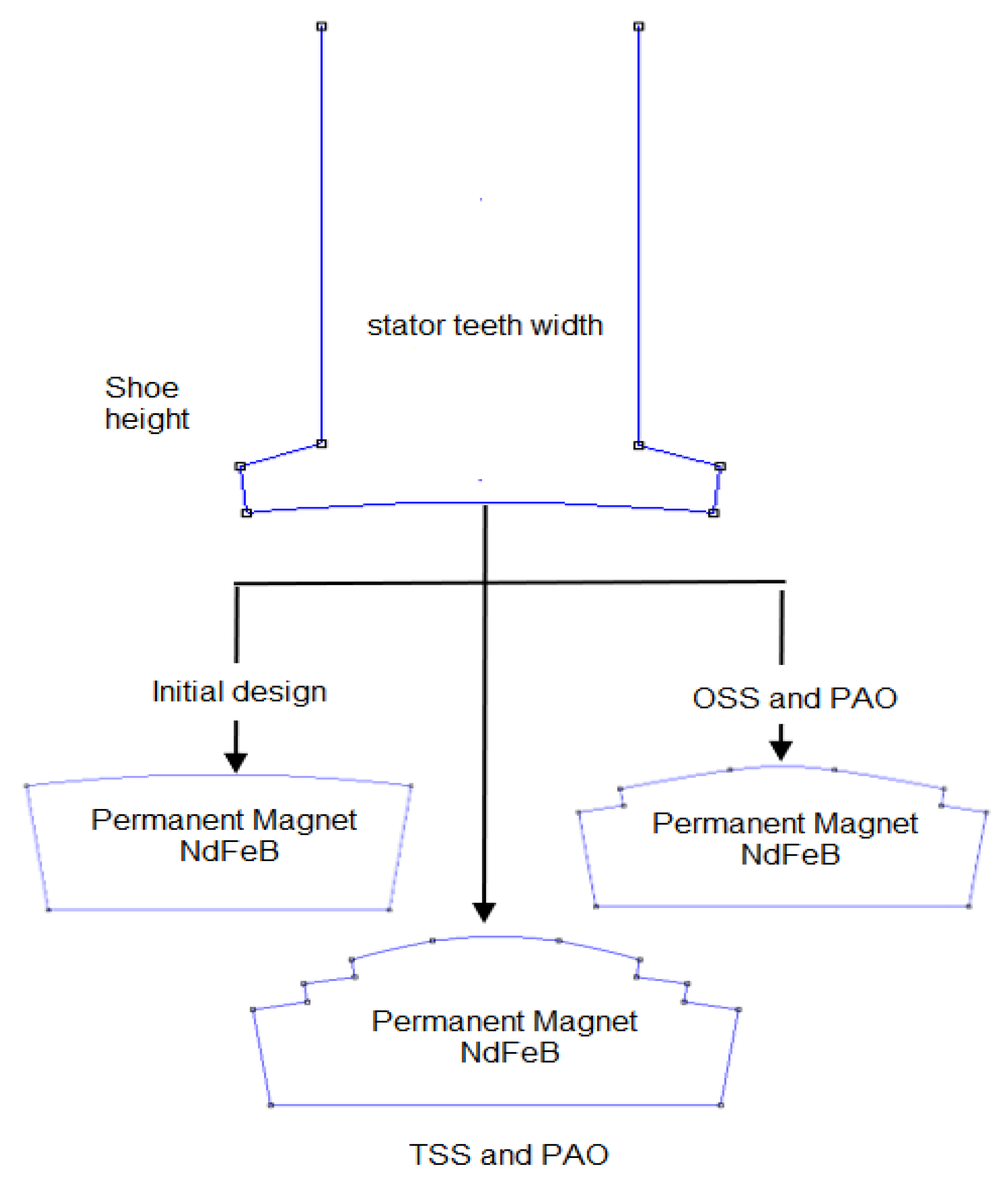
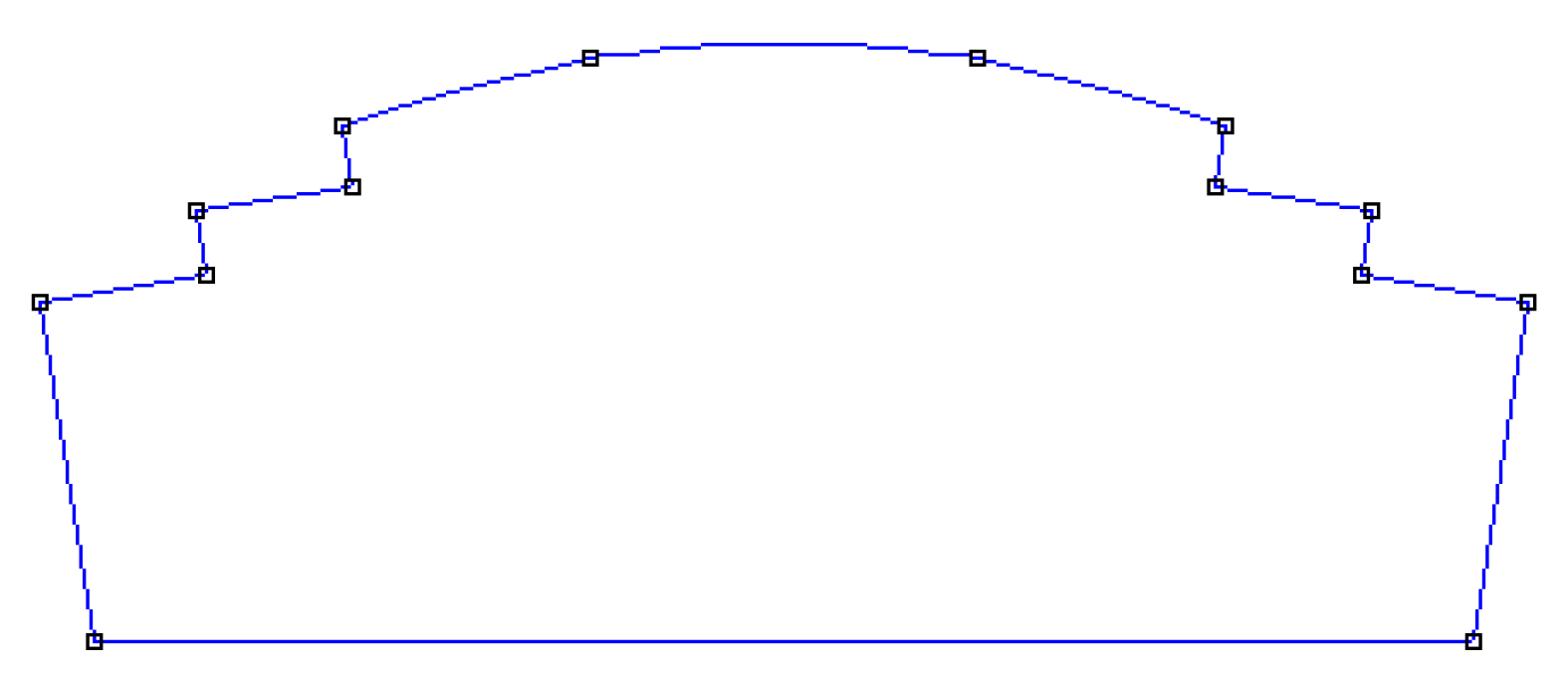
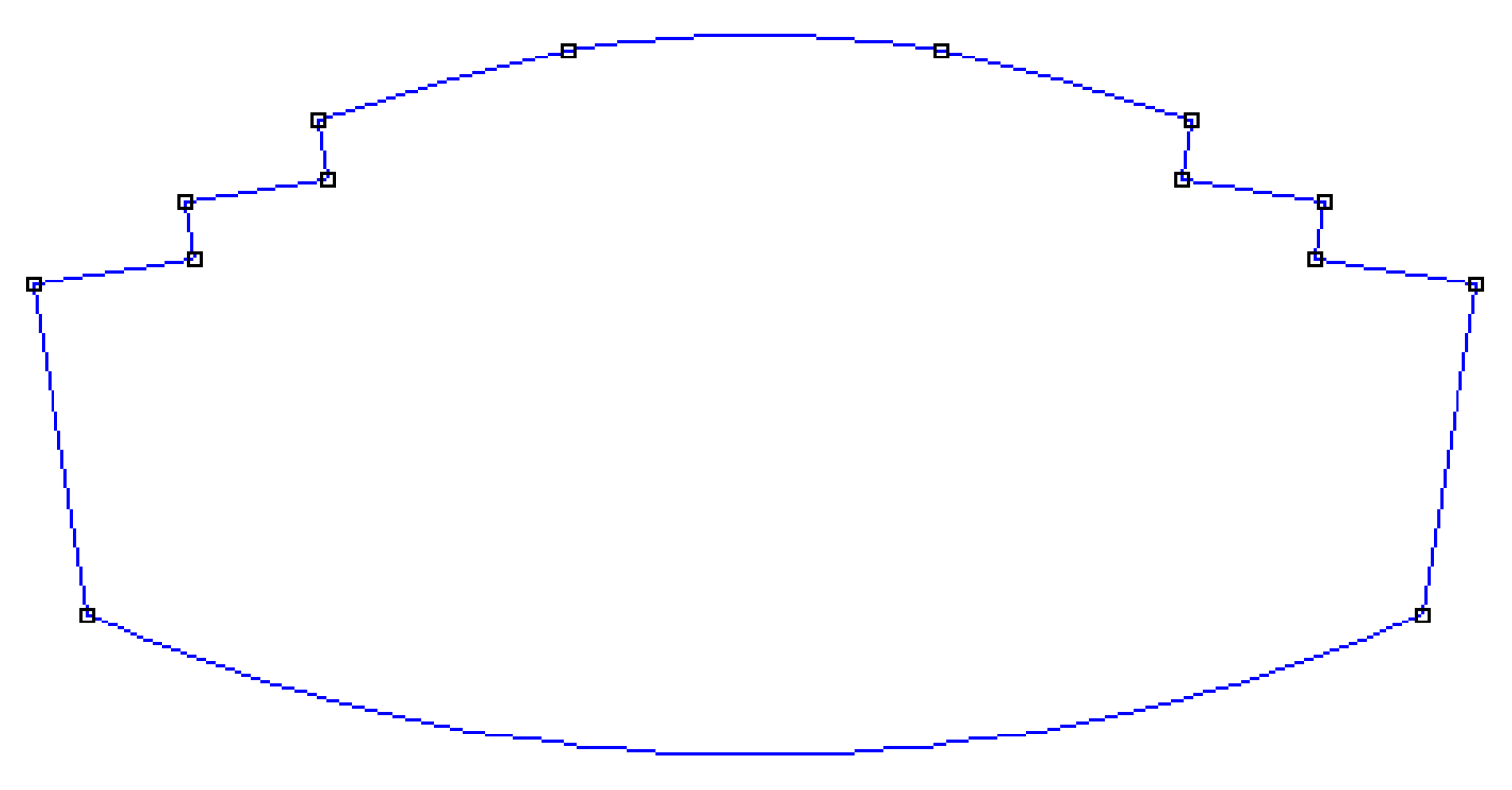
2.3. The Impact of Slotting on the Magnet Edge on the Reduction in CT
3. Results and Discussion
3.1. FEMM Simulation Setup
- Creating a direct model in the FEMM system or importing the PMG setup from AutoCAD version 2021. Rather than incorporating an AutoCAD image of the structure under examination, we directly render the PMG structures within the FEMM system.
- Establishing parameters for evaluation. The FEMM interface enables the evaluation of the parameters of the analyzed PMGs.
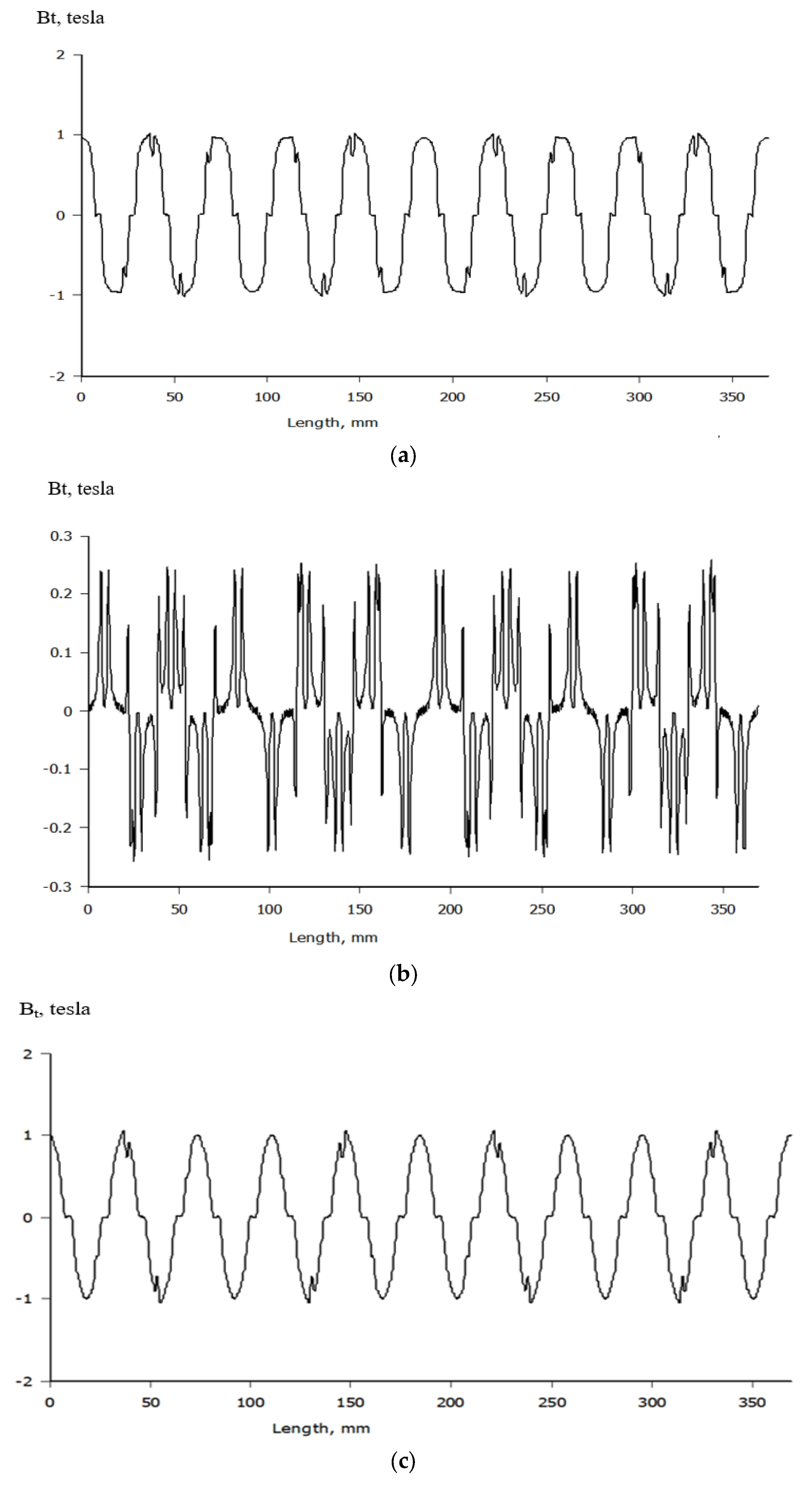
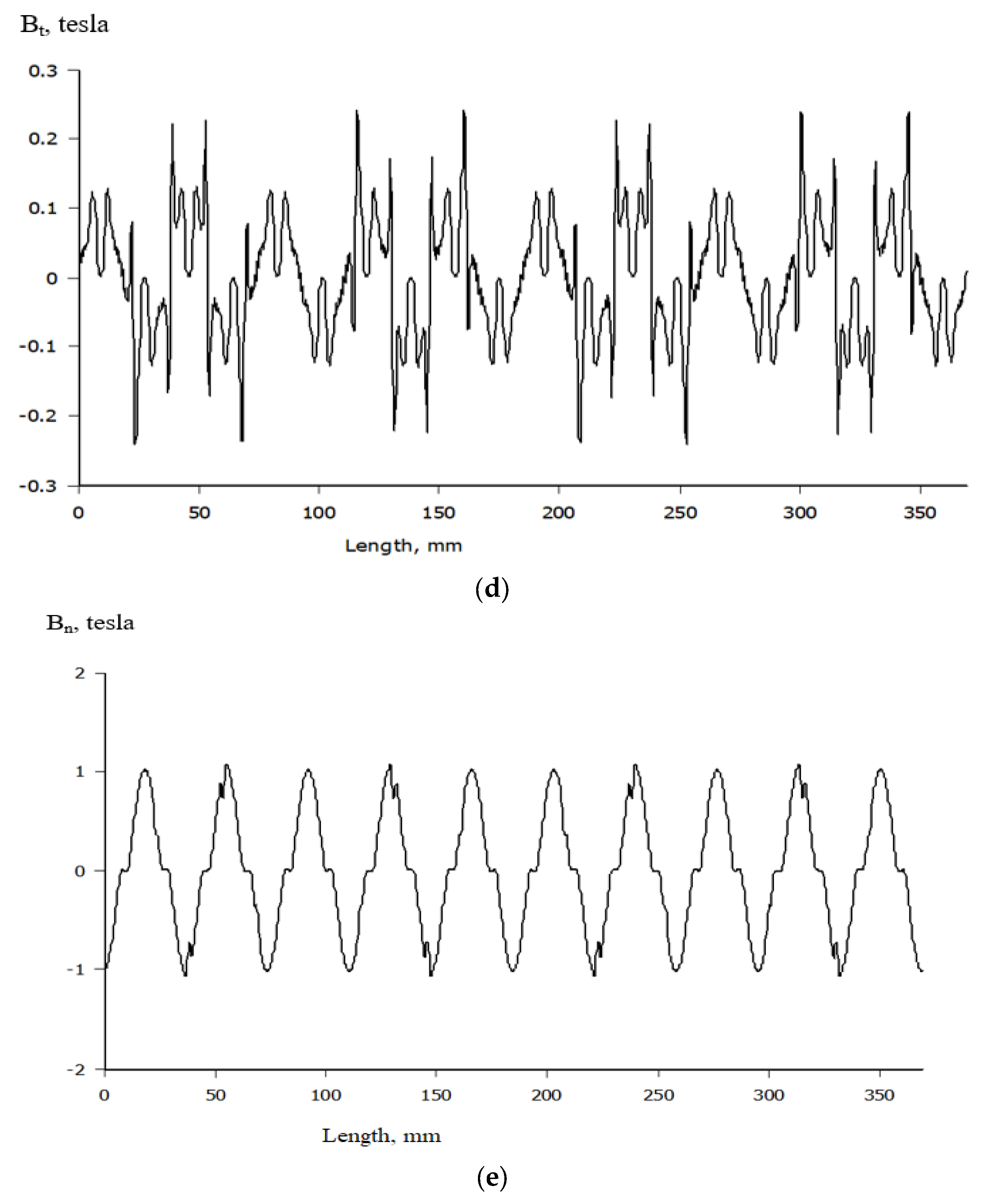
- Calculating and determining the magnetic flux density. At this stage, we derive both the tangential and normal magnetic flux densities from the analyzed permanent magnet generators. We utilize five artificial lines at the air gap of all machines analyzed to guarantee precise calculations.
- Recording the performance of the PMGs by determining the maximum CT value for the evaluated PMGs. The CT of PMGs is recorded for every mechanical degree of the magnet rotor’s rotation. Each rotational increment produces a mechanical revolution of 10 degrees.
- Rotors reaching a definitive position. Given that the examined PMGs have a pole count of 20, the computation of PMG CT requires 360 mechanical rotations.
- Providing conclusions.
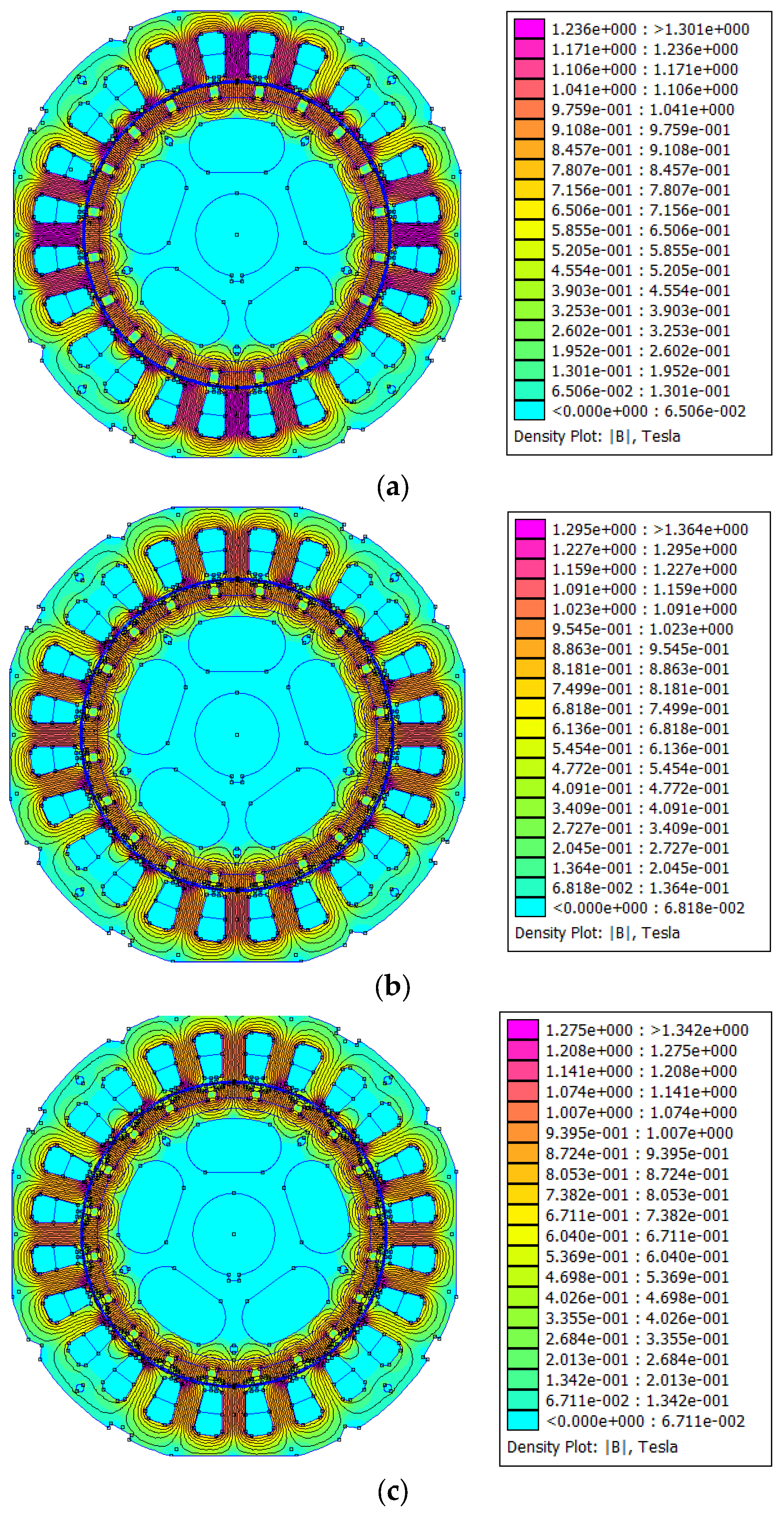
3.2. The Magnet Flux Density Value in the Core of Every PMG Under Investigation
3.3. Value of the Tangential and Normal Magnetic Flux in the PMG’s Airgap
3.4. The Cogging Torque Value for the PMGs Under Study
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Padmanathan, K.; Kamalakannan, N.; Sanjeevikumar, P.; Blaabjerg, F.; Holm-Nielsen, J.B.; Uma, G.; Arul, R.; Rajesh, R.; Srinivasan, A.; Baskaran, J. Conceptual Framework of Antecedents to Trends on Permanent Magnet Synchronous Generators for Wind Energy Conversion Systems. Energies 2019, 12, 2616. [Google Scholar] [CrossRef]
- Hwang, C.C.; Tang, P.H. Performance and applications of a small permanent magnet generator. In Proceedings of the 2005 IEEE International Magnetics Conference (INTERMAG), Nagoya, Japan, 4–8 April 2005; p. 335. [Google Scholar]
- Mostaman, N.; Sulaiman, E.; Jenal, M. Overview of Axial Flux Permanent Magnet Generator for Small-Scale Industry. IOP Conf. Ser. Earth Environ. Sci. 2023, 1261, 12004. [Google Scholar] [CrossRef]
- Rahman, A.; Dutta, R.; Chu, G.; Xiao, D.; Thippiripati, V.K.; Rahman, M.F. Open-Winding Permanent Magnet Synchronous Generator for Renewable Energy—A Review. Energies 2023, 16, 5268. [Google Scholar] [CrossRef]
- Chung, D.-W.; Yongmin, Y. Cogging Torque Reduction in Permanent-Magnet Brushless Generators for Small Wind Turbines. J. Magn. 2015, 20, 176–185. [Google Scholar] [CrossRef]
- Yazdanpanah, R.; Afroozeh, A.; Eslami, M. Analytical design of a radial-flux PM generator for direct-drive wind turbine renewable energy application. Energy Rep. 2022, 8, 3011–3017. [Google Scholar] [CrossRef]
- Herlina; Rahardjo, A.; Sudiarto, B.; Setiabudy, R. The Implement of Permanent Magnet Material Variations on the Reduction of Cogging Torque in PMSG. IOP Conf. Ser. Mater. Sci. Eng. 2019, 620, 12101. [Google Scholar] [CrossRef]
- Ladghem-Chikouche, B.; Boughrara, K.; Ibtiouen, R. Cogging Torque Minimization of Surface-Mounted Permanent Magnet Synchronous Machines Using Hybrid Magnet Shapes. Prog. Electromagn. Res. B 2015, 62, 49–61. [Google Scholar] [CrossRef]
- Said, S.M.; Nur, T.; Herlina, H. The Application of Magnet Structures to Reduce the Cogging Torque Associated with Fractional Slot Number in Permanent Magnet Generators. Energies 2024, 17, 2505. [Google Scholar] [CrossRef]
- García-Gracia, M.; Jiménez Romero, Á.; Herrero Ciudad, J.; Martín Arroyo, S. Cogging Torque Reduction Based on a New Pre-Slot Technique for a Small Wind Generator. Energies 2018, 11, 3219. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Ghaheri, A.; Abbaszadeh, K. Cogging Torque Reduction in U-Core TFPM Generator Using Different Halbach-Array Structures. In Proceedings of the 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 1153–1158. [Google Scholar]
- Potgieter, J.H.J.; Kamper, M.J. Cogging torque sensitivity in design optimisation of low cost non-overlap winding PM wind generator. In Proceedings of the the XIX International Conference on Electrical Machines–CEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Herlina; Setiabudy, R.; Rahardjo, A. Influence of permanent magnet and width of stator slot to cogging torque reduction in PMSG using anti-notch and cutting edge method. In Proceedings of the 2017 15th International Conference on Quality in Research (QiR): International Symposium on Electrical and Computer Engineering, Nusa Dua, Bali, 24–27 July 2017; pp. 408–413. [Google Scholar]
- Zhang, Y.; Wang, F. Choice of Pole-Slot Number Combination for PM Generator Direct-Driven by Wind Turbine. In Proceedings of the 2008 Joint International Conference on Power System Technology and IEEE Power India Conference, New Delhi, India, 12–15 October 2008; pp. 1–4. [Google Scholar]
- Shao, L.; Hua, W.; Soulard, J.; Zhu, Z.-Q.; Wu, Z.; Cheng, M. Electromagnetic Performance Comparison Between 12-Phase Switched Flux and Surface-Mounted PM Machines for Direct-Drive Wind Power Generation. IEEE Trans. Ind. Appl. 2020, 56, 1408–1422. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Meng, G.; Zhou, S.; Cao, Q. Analytical Calculation of Magnetic Field and Cogging Torque in Surface-Mounted Permanent-Magnet Machines Accounting for Any Eccentric Rotor Shape. IEEE Trans. Ind. Electron. 2015, 62, 3438–3447. [Google Scholar] [CrossRef]
- Huang, C.; Jia, R.; Chen, B.; Zhang, M.; Chen, H.; Wang, Y.; Mao, J. Research on Cogging Torque Reduction Based on Multi-Parameter Optimization of Auxiliary Slots and Pole-Arc Coefficient. J. Electr. Eng. Technol. 2025, 20, 1439–1449. [Google Scholar] [CrossRef]
- Nur, T.; Muljadi, E.; Herlina; Kasbi, S.; Ling, J.M. The Effect of the Number of Concentrate Slots and Pole Arc Optimization on the Cogging Torque Reduction in Fractional Slot Number Type of PMMs. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021; pp. 17–22. [Google Scholar]
- Wahab, H.; Nur, T.; Kartawidjaja, M.; Wijayanti, L.; Indriati, K.; Tobing, S. Declining Cogging Torque Technique of an Integral Slot Number for Permanent Magnet Machines. J. Rekayasa Elektr. 2023, 19, 135–142. [Google Scholar] [CrossRef]
- Petkovska, L.; Lefley, P.; Cvetkovski, G. Design techniques for cogging torque reduction in a fractional-slot PMBLDC motor. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2020, ahead of print. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Wu, D.; Ge, X. Investigation of Voltage Distortion in Fractional Slot Interior Permanent Magnet Machines Having Different Slot and Pole Number Combinations. IEEE Trans. Energy Convers. 2016, 31, 1192–1201. [Google Scholar] [CrossRef]
- Nur, T.; Suherman, Y.; Wahab, H. The Effect of Magnet Structure on the Cogging Torque Reduction in a Permanent Magnet Generator. J. Southwest Jiaotong Univ. 2021, 56, 313–323. [Google Scholar] [CrossRef]
- Nur, T.; Mawar, S. Improvement of Cogging Torque Reduction by Combining the Magnet Edge Shaping and Dummy Slot in Stator Core of Fractional Slot Number in Permanent Magnet Machine. IOP Conf. Ser. Mater. Sci. Eng. 2020, 807, 12023. [Google Scholar] [CrossRef]
- Hamadou, G.; Masmoudi, A. On the cogging torque reduction capability of fractional-slot PM machines. J. Electr. Eng. 2011, 11, 8. [Google Scholar]
- Chen, X.; Wang, J. Magnetomotive force harmonic reduction techniques for fractional-slot non-overlapping winding configurations in permanent-magnet synchronous machines. Chinese J. Electr. Eng. 2017, 3, 102–113. [Google Scholar] [CrossRef]
- Nakano, M.; Morita, Y.; Matsunaga, T. Reduction of Cogging Torque Due to Production Tolerances of Rotor by Using Dummy Slots Placed Partially in Axial Direction. IEEE Trans. Ind. Appl. 2015, 51, 4372–4382. [Google Scholar] [CrossRef]
- Lan, H.; Chen, Q.; Zou, J.; Xu, Y.; Wang, M.; Liu, M. Influence of dummy slots on noise and vibration performance in permanent magnet synchronous machines. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–6. [Google Scholar]
- Joe, L.; Nur, T. Study the Effect of Dummy Slot in Stator and Rotor on the Cogging Torque Reduction in Permanent Magnet Machine. IOP Conf. Ser. Mater. Sci. Eng. 2020, 807, 12025. [Google Scholar] [CrossRef]
- Sato, D.; Maejima, R.; Kitagawa, W.; Takeshita, T. Cogging Torque Reduction by Using Double Skew of Permanent Magnets in Axial Gap Motor. In Proceedings of the 2022 International Conference on Electrical Machines (ICEM), Valencia, Spain, 5–8 September 2022; pp. 212–218. [Google Scholar]
- Luu, P.T.; Lee, J.-Y.; Hwang, W.; Woo, B.-C. Cogging Torque Reduction Technique by Considering Step-Skew Rotor in Permanent Magnet Synchronous Motor. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Republic of Korea, 7–10 October 2018; pp. 219–223. [Google Scholar]
- Mizuno, A.; Kitagawa, W.; Takaharu, T. Cogging Torque Reduction Using Magnet Phase Inverted Shape in Dual Axial Gap Motor. In Proceedings of the 2024 IEEE Industrial Electronics and Applications Conference (IEACon), Kuala Lumpur, Malaysia, 4–5 November 2024; pp. 112–117. [Google Scholar]
- Jia, L.; Lin, M.; Le, W.; Li, N.; Kong, Y. Dual-Skew Magnet for Cogging Torque Minimization of Axial Flux PMSM With Segmented Stator. IEEE Trans. Magn. 2020, 56, 1–6. [Google Scholar] [CrossRef]
- Gulec, M.; Aydin, M. Magnet asymmetry in reduction of cogging torque for integer slot axial flux permanent magnet motors. Electr. Power Appl. IET 2014, 8, 189–198. [Google Scholar] [CrossRef]
- Lounthavong, V.; Sriwannarat, W.; Siritaratiwat, A.; Khunkitti, P. Optimal Stator Design of Doubly Salient Permanent Magnet Generator for Enhancing the Electromagnetic Performance. Energies 2019, 12, 3201. [Google Scholar] [CrossRef]
- Nur, T. Herlina Investigation of the Implement the Shoe Height and Slot Opening Width on Decreasing the Peak of Cogging Torque in PMSG. In Proceedings of the 2019 International Conference on Electrical Engineering and Computer Science (ICECOS), Batam Island, Indonesia, 2–3 October 2019; pp. 411–415. [Google Scholar]
- Kwang, T.C.; Mohd Jamil, M.L.; Jidin, A. Improved magnetic behavior of hemicycle PM motor via stator modification. Int. J. Electr. Comput. Eng. 2020, 10, 3323. [Google Scholar] [CrossRef]
- Sjölund, J.; Eriksson, S. Effect of Pole Shoe Design on Inclination Angle of Different Magnetic Fields in Permanent Magnet Machines. Energies 2021, 14, 2437. [Google Scholar] [CrossRef]
- Anuja, T.A.; Doss, M.A. Reduction of Cogging Torque in Surface Mounted Permanent Magnet Brushless DC Motor by Adapting Rotor Magnetic Displacement. Energies 2021, 14, 2861. [Google Scholar] [CrossRef]
- Panchal, T.; Patel, A.; Patel, R. Reduction of cogging torque of radial flux permanent magnet brushless DC motor by magnet shifting technique. Electr. Eng. Electromec. 2022, 15–20. [Google Scholar] [CrossRef]
- Yea, M.; Han, K.J. Modified Slot Opening for Reducing Shaft-to-Frame Voltage of AC Motors. Energies 2020, 13, 760. [Google Scholar] [CrossRef]
- Liu, T.; Huang, S.; Gao, J.; Lu, K. Cogging Torque Reduction by Slot-Opening Shift for Permanent Magnet Machines. IEEE Trans. Magn. 2013, 49, 4028–4031. [Google Scholar] [CrossRef]
- Liu, C.; Zhu, J.; Wang, Y.; Lei, G.; Guo, Y. Cogging Torque Minimization of SMC PM Transverse Flux Machines Using Shifted and Unequal-Width Stator Teeth. IEEE Trans. Appl. Supercond. 2016, 26, 1–4. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Cappello, A.D.F. Reduction of cogging force in PM linear motors by pole-shifting. Electr. Power Appl. IEE Proc. 2005, 152, 703–709. [Google Scholar] [CrossRef]
- Goryca, Z.; Pakosz, A. Influence of selected reduction methods on the cogging torque of multipolar machines with permanent magnets. In Proceedings of the 2019 15th Selected Issues of Electrical Engineering and Electronics (WZEE), Zakopane, Poland, 8–10 December 2019; pp. 1–6. [Google Scholar]
- Xing, Z.; Wang, X.; Zhao, W. Cogging torque reduction based on segmented skewing magnetic poles with different combinations of pole-arc coefficients in surface-mounted permanent magnet synchronous motors. IET Electr. Power Appl. 2021, 15, 200–213. [Google Scholar] [CrossRef]
- Kudrjavtsev, O.; Kilk, A. Cogging torque reduction methods. In Proceedings of the 2014 Electric Power Quality and Supply Reliability Conference (PQ), Rakvere, Estonia, 11–13 June 2014; pp. 251–254. [Google Scholar]
- Cetin, E. Cogging torque reduction by utilizing the unequal rotor slot arc method for FSPM Machines. Ain Shams Eng. J. 2024, 15, 103008. [Google Scholar] [CrossRef]
- Gieras, J.; Wing, M. Permanent Magnet Motor Technology: Design and Applications; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Scuiller, F. Magnet Shape Optimization to Reduce Pulsating Torque for a Five-Phase Permanent-Magnet Low-Speed Machine. IEEE Trans. Magn. 2014, 50, 1–9. [Google Scholar] [CrossRef]
- Hanselman, D. Brushless Permanent Magnet Motor Design; The Writers’ Collective: Cranston, RI, USA, 2003. [Google Scholar]
- Nur, T.; Joe, L.E. Study of The Effect of Height and Length of Slotting in Magnet Edge on the Cogging Torque Reduction of Fractional Slot Number in Permanent Magnet Machine. IOP Conf. Ser. Mater. Sci. Eng. 2020, 807, 12026. [Google Scholar] [CrossRef]
- Srisiriwanna, T.; Konghirun, M. A study of cogging torque reduction methods in brushless dc motor. In Proceedings of the 2012 9th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Phetchaburi, Thailand, 16–18 May 2012; pp. 1–4. [Google Scholar]
- David Meeker Finite Element Method Magnetics: MagneticsTutorial. Available online: https://www.femm.info/wiki/davidmeeker (accessed on 14 December 2013).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Initial Structure | OSS (One-Step Slotting) | TSS (Two-Step Slotting) |
|---|---|---|---|
| Stator teeth height (mm) | 14.9969 | 14.9969 | 14.9969 |
| Stator teeth width (mm) | 9.15131 | 9.15131 | 9.15131 |
| Shoe height (mm) | 1.5 | 1.5 | 1.5 |
| Air gap length (mm) | 1.0 | 1.0 | 1.0 |
| Magnet edge height (mm) | 5.28758 | 3.83758 | 3.28758 |
| Magnet center height (mm) | 5.65991 | 5.65991 | 5.65991 |
| Magnet base length (mm) | 13.0836 | 13.0836 | 13.0836 |
| Magnet cross-sectional area (m2) | 7.7235 × 10−5 | 6.9397 × 10−5 | 6.50519 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abduh, S.; Karunanithi, S.; Nur, T. Analysis of the Cogging Torque Reduction in Permanent Magnet Generators for a Very Low Wind Speed. Energies 2025, 18, 2802. https://doi.org/10.3390/en18112802
Abduh S, Karunanithi S, Nur T. Analysis of the Cogging Torque Reduction in Permanent Magnet Generators for a Very Low Wind Speed. Energies. 2025; 18(11):2802. https://doi.org/10.3390/en18112802
Chicago/Turabian StyleAbduh, Syamsir, S. Karunanithi, and Tajuddin Nur. 2025. "Analysis of the Cogging Torque Reduction in Permanent Magnet Generators for a Very Low Wind Speed" Energies 18, no. 11: 2802. https://doi.org/10.3390/en18112802
APA StyleAbduh, S., Karunanithi, S., & Nur, T. (2025). Analysis of the Cogging Torque Reduction in Permanent Magnet Generators for a Very Low Wind Speed. Energies, 18(11), 2802. https://doi.org/10.3390/en18112802