
A Study of Digital Measurement and Analysis Technology for Transformer Excitation Magnetizing Curve


Abstract
:1. Introduction
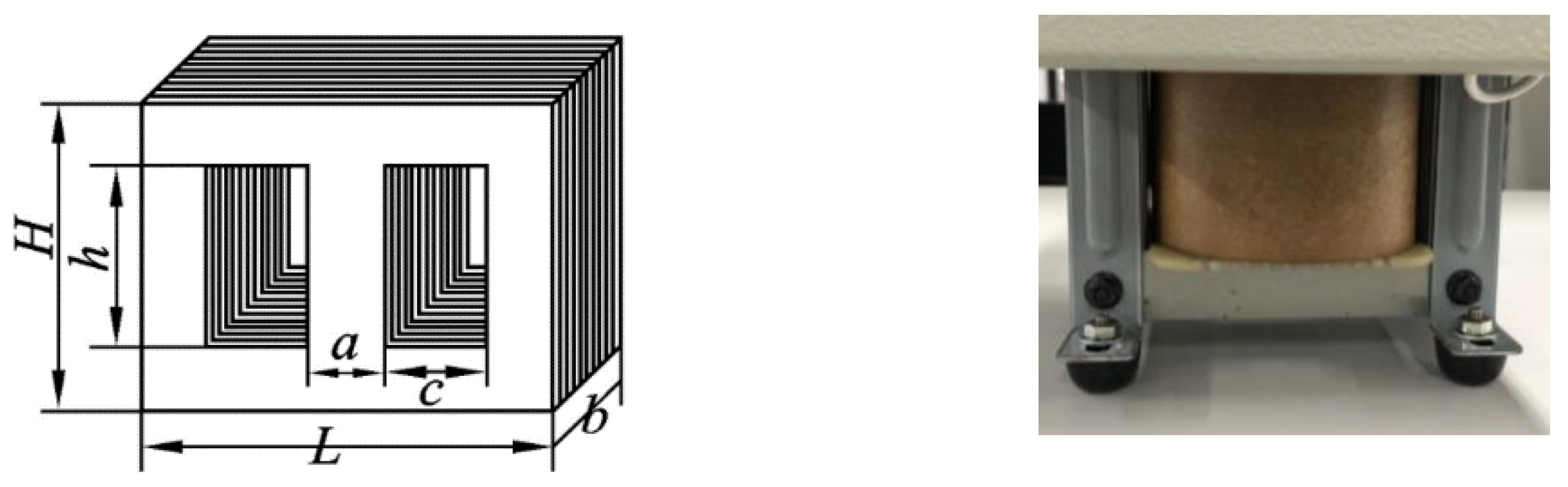
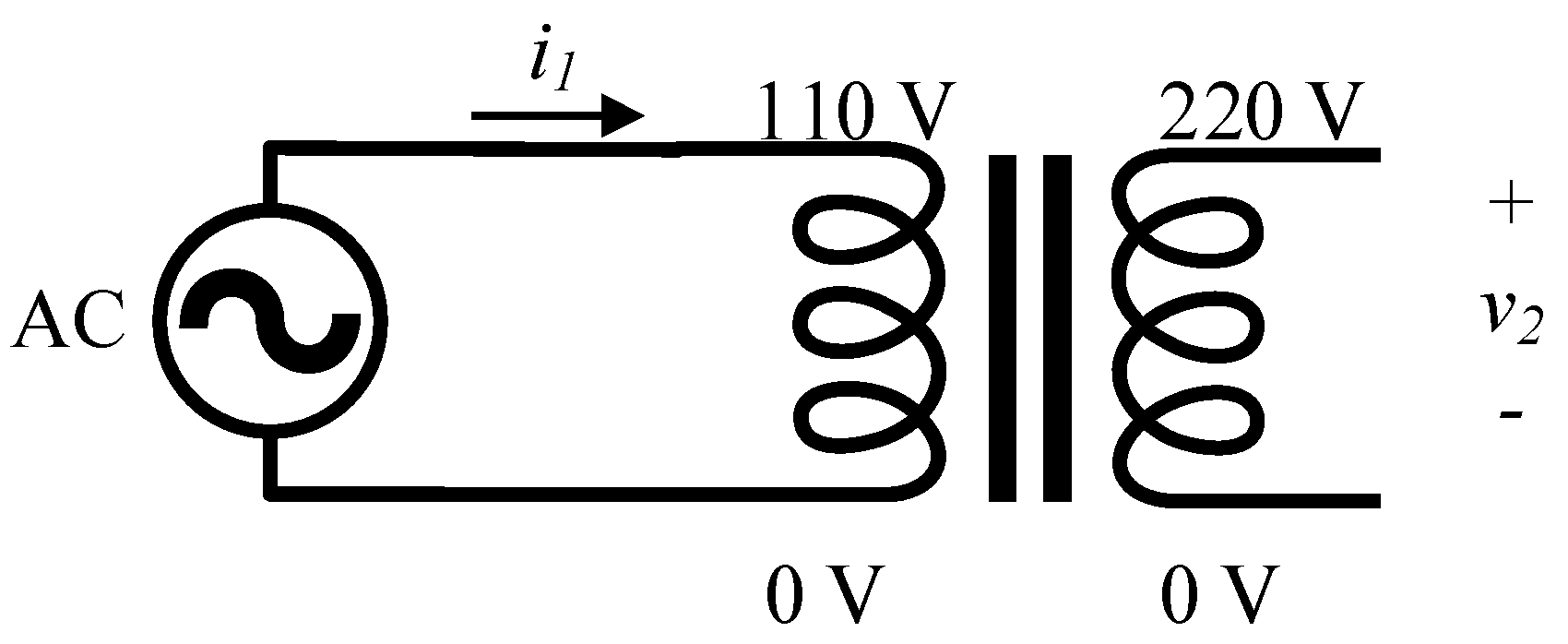
2. Transformer Specifications and Measurements
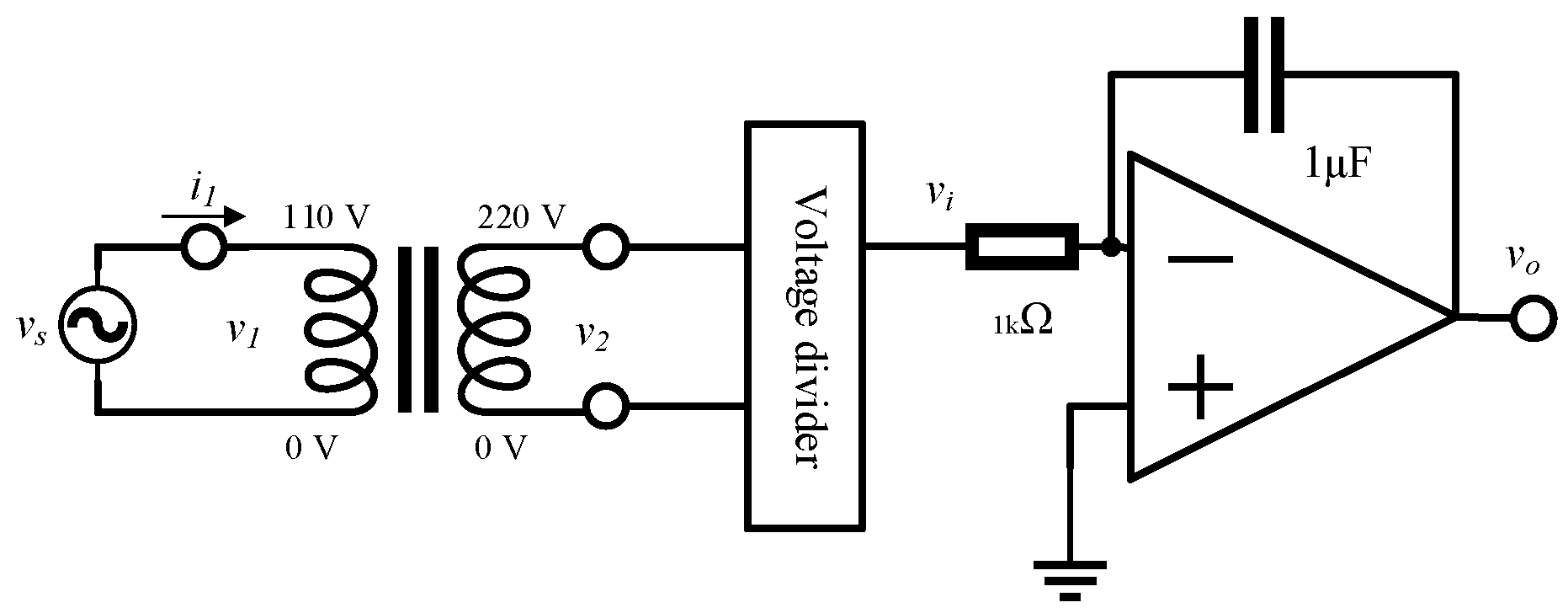
3. Signal Processing of Analog-Circuit B–H Curves
Active Integrator Circuit
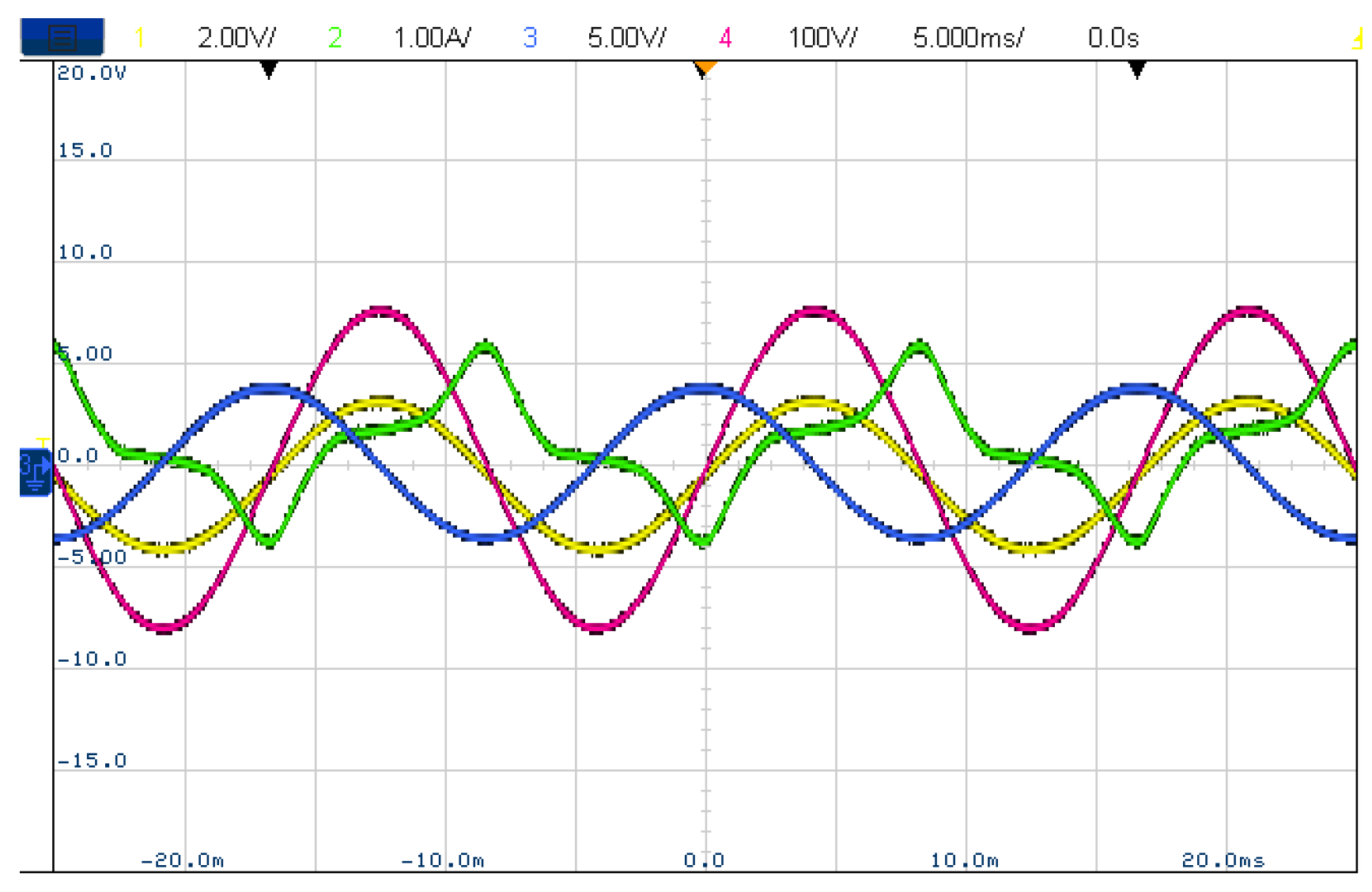
4. Digital B–H Signal Processing
4.1. Test Structure and Settings
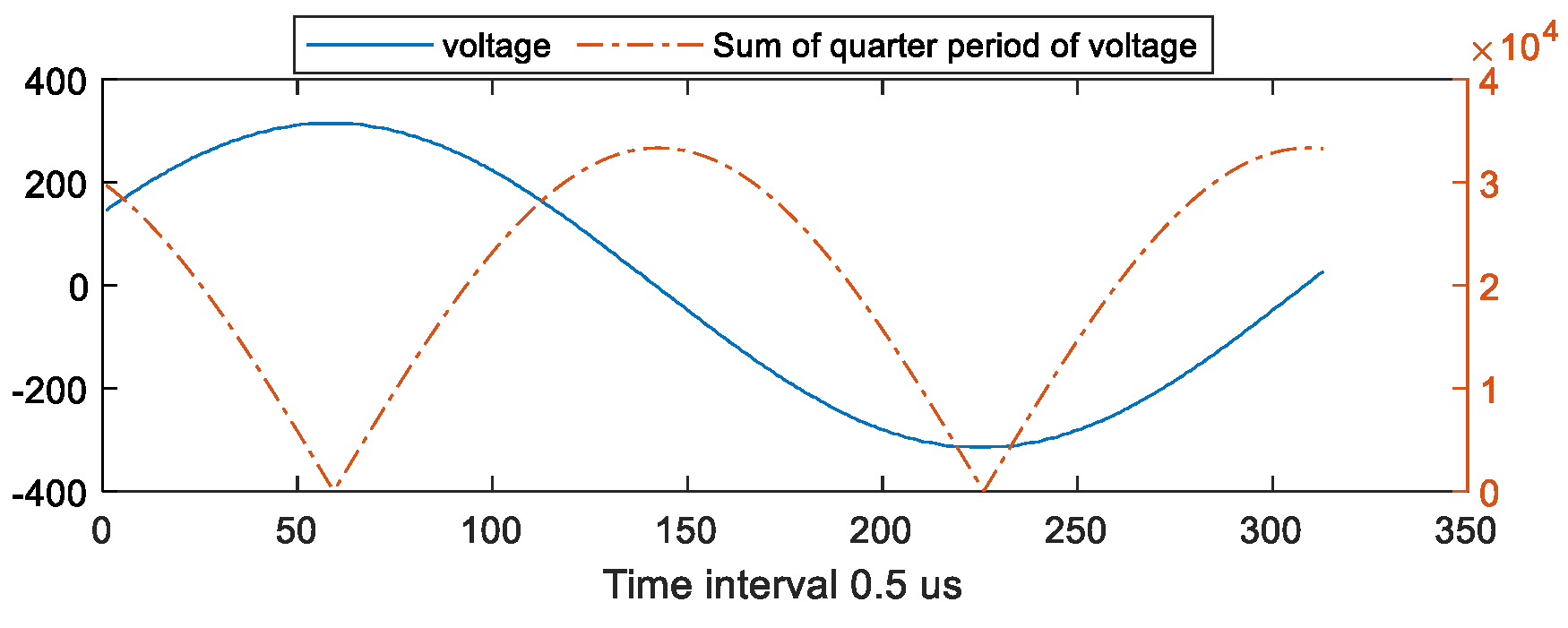
4.2. Method of Calculating Magnetic Flux Density
4.2.1. Effects of Initial Integration Position and Voltage Phase
4.2.2. Effects of DC Components
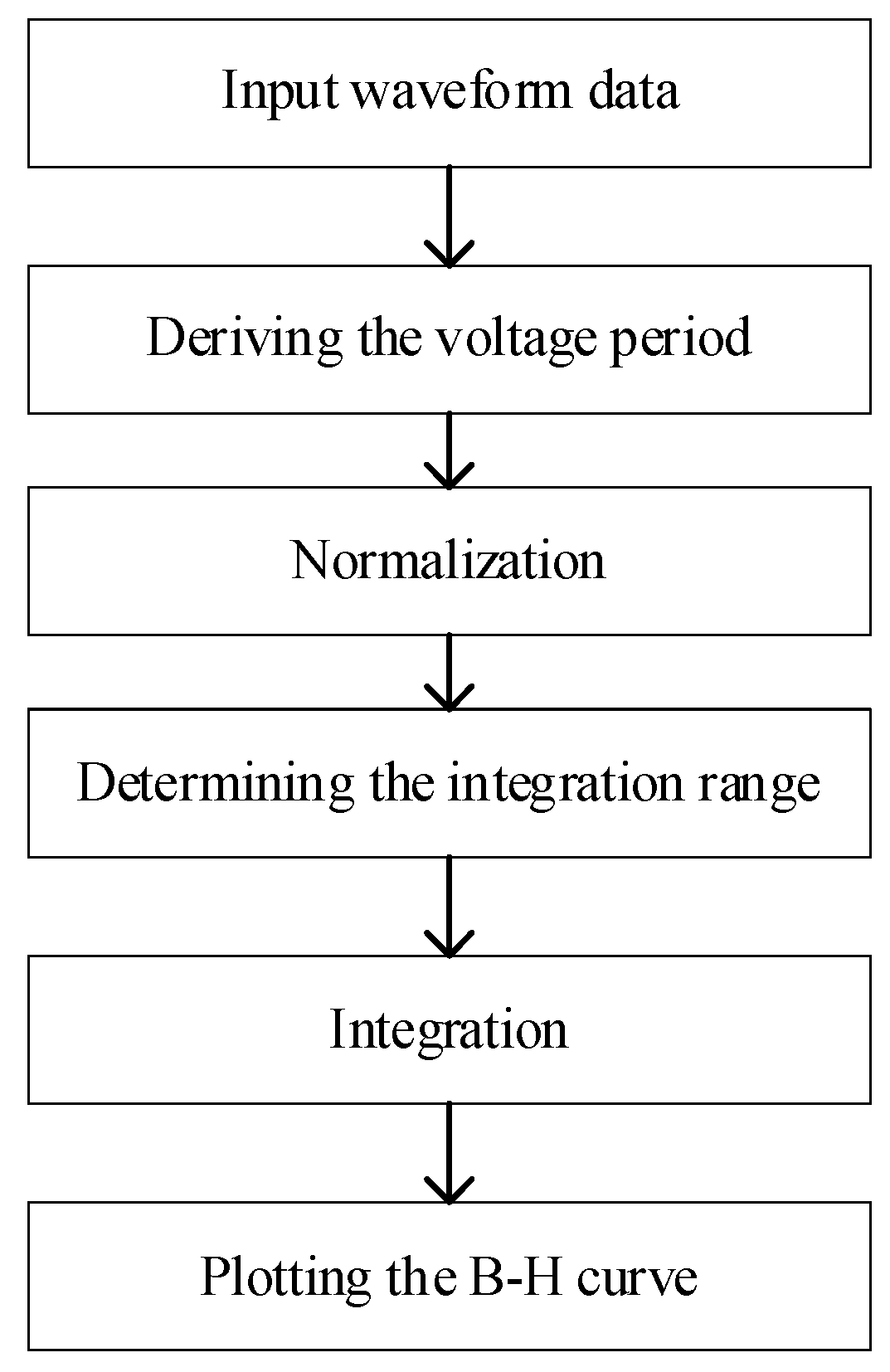
4.3. Proposed Magnetization Curve Calculation Method
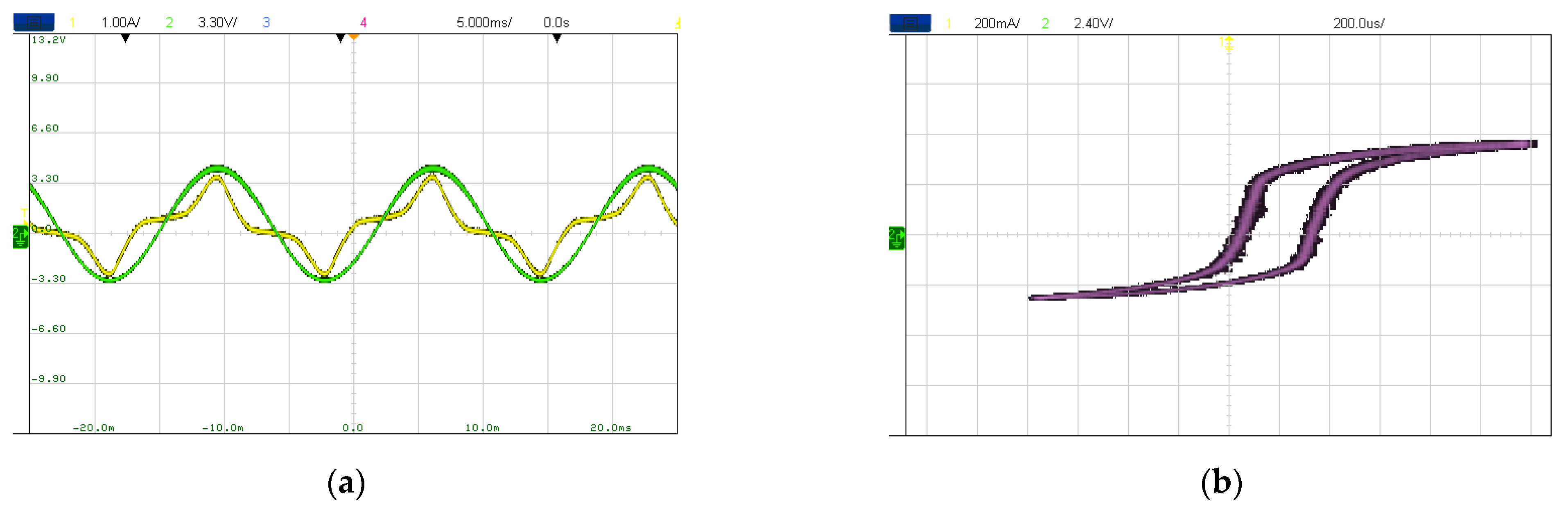
4.4. Test Results
4.5. Effects of Harmonics on Measurements
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cazacu, E.; Petrescu, L. A simple and low-cost method for miniature power transformers’ hysteresis losses evaluation. In Proceedings of the 2013 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 May 2013; pp. 1–4. [Google Scholar]
- Albert, D.; Schachinger, P.; Pirker, A.; Engelen, C.; Belavic, F.; Leber, G.; Renner, H. Power transformer hysteresis measurement. In Proceedings of the 17. Symposium Energieinnovation: Future of Energy-Innovationen für eine klimaneutrale Zukunft: EnInnov 2022, Graz, Austria, 16–18 February 2022. [Google Scholar]
- Raj, R.; Ram, B.S.; Bhat, R.; Unniachanparambil, G.M.; Kulkarni, S.V. A Novel Cost-Effective Magnetic Characterization Tool for Soft Magnetic Materials Used in Electrical Machines. IEEE Trans. Instrum. Meas. 2021, 70, 6009508. [Google Scholar] [CrossRef]
- Soto, M.; Martinez-De-Guerenu, A.; Gurruchaga, K.; Arizti, F. A Completely Configurable Digital System for Simultaneous Measurements of Hysteresis Loops and Barkhausen Noise. IEEE Trans. Instrum. Meas. 2009, 58, 1746–1755. [Google Scholar] [CrossRef]
- Stupakov, A.; Perevertov, O.; Zablotskii, V. A System for Controllable Magnetic Measurements of Hysteresis and Barkhausen Noise. IEEE Trans. Instrum. Meas. 2015, 65, 1087–1097. [Google Scholar] [CrossRef]
- Artetxe, I.; Arizti, F.; Martinez-De-Guerenu, A. A New Technique to Obtain an Equivalent Indirect Hysteresis Loop from the Distortion of the Voltage Measured in the Excitation Coil. IEEE Trans. Instrum. Meas. 2020, 70, 6000912. [Google Scholar] [CrossRef]
- Pólik, Z.; Kuczmann, M. Measuring and control the hysteresis loop by using analog and digital integrators. J. Optoelectron. Adv. Mater. 2008, 10, 1861–1865. [Google Scholar]
- Chatterjee, A.; Das, S.; Chatterjee, D. Effective Method to Measure and Inspect the Hysteresis Loss of a Transformer. J. Electr. Electron. Inf. Commun. Technol. 2021, 3, 44–48. [Google Scholar] [CrossRef]
- Kis, P.; Kuczmann, M.; Füzi, J.; Iványi, A. Hysteresis measurement in LabView. Phys. B Condens. Matter 2004, 343, 357–363. [Google Scholar] [CrossRef]
- Carducci, C.G.C.; Marracci, M.; Attivissimo, F.; Giannetti, R.; Tellini, B. An Improved DAQ-Based Method for Ferrite Characterization. IEEE Trans. Instrum. Meas. 2017, 66, 2413–2421. [Google Scholar] [CrossRef]
- Francavilla, T.L.; Claassen, J.H.; Willard, M.A. A digital hysteresis loop experiment. Am. J. Phys. 2013, 81, 745–749. [Google Scholar] [CrossRef]
- Gryś, S.; Najgebauer, M. An attempt of accuracy assessment of the hysteresis loop and power loss in magnetic materials during control measurements. Measurement 2021, 174, 108962. [Google Scholar] [CrossRef]
- Shirane, T.; Ito, M. Measurement of Hysteresis Loop on Soft Magnetic Materials Using Lock-In Amplifier. IEEE Trans. Magn. 2012, 48, 1437–1440. [Google Scholar] [CrossRef]
- Phuangyod, A.; Pansri, B.; Koompai, C.; Thararak, P. Two simple approaches of hysteresis loop measurement using MATLAB/Simulink. In Proceedings of the 2022 International Electrical Engineering Congress (iEECON), Khon Kaen, Thailand, 9–11 March 2022; pp. 1–4. [Google Scholar]
- Artetxe, I.; Arizti, F.; Martinez-De-Guerenu, A. Improvement in the Equivalent Indirect Hysteresis Cycles Obtained from the Distortion of the Voltage Measured in the Excitation Coil. IEEE Trans. Instrum. Meas. 2021, 70, 6009711. [Google Scholar] [CrossRef]
- Ece, D.; Akcay, H. An analysis of transformer excitation current under nonsinusoidal supply voltage. IEEE Trans. Instrum. Meas. 2002, 51, 1085–1089. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Data | |
|---|---|---|
| Core dimension (datum measured from Figure 1) | a | 0.045 m |
| b | 0.050 m | |
| c | 0.025 m | |
| h | 0.068 m | |
| Primary winding number, N1 | 138 | |
| Secondary winding number, N2 | 274 | |
| Equivalent flux paths length, l | 0.1945 m | |
| Equivalent core cross-sectional area, S | 0.00225 m2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-H.; Chou, C.-J. A Study of Digital Measurement and Analysis Technology for Transformer Excitation Magnetizing Curve. Energies 2023, 16, 164. https://doi.org/10.3390/en16010164
Chen C-H, Chou C-J. A Study of Digital Measurement and Analysis Technology for Transformer Excitation Magnetizing Curve. Energies. 2023; 16(1):164. https://doi.org/10.3390/en16010164
Chicago/Turabian StyleChen, Chien-Hsun, and Chih-Ju Chou. 2023. "A Study of Digital Measurement and Analysis Technology for Transformer Excitation Magnetizing Curve" Energies 16, no. 1: 164. https://doi.org/10.3390/en16010164
APA StyleChen, C.-H., & Chou, C.-J. (2023). A Study of Digital Measurement and Analysis Technology for Transformer Excitation Magnetizing Curve. Energies, 16(1), 164. https://doi.org/10.3390/en16010164