1. Introduction
In applications requiring high functional reliability and high torque density such as electric vehicles, submarines, and aircrafts, the use of multiphase PMSMs is a promising solution. With a high number of phases (>3), multiphase machines have more degrees of freedom for design and control compared with the conventional three-phase machines, especially fault tolerance [
1,
2,
3]. A
n-phase symmetrical machine is characterized by (
n − 1)/2 (when
n is odd) and (
n − 2)/2 (when
n is even) orthogonal planes, known as two-dimensional reference frames [
4]. In healthy mode, each of these reference frames is associated with a group of harmonics of currents and back electromotive forces (back-EMFs). As presented in the first part of this study, under healthy condition, the rotor field-oriented control (RFOC) technique with the classical proportional integral (PI) controllers to control multiphase drives are facilitated if constant reference d-q currents are used. Nevertheless, NS-EMFs possibly contain more harmonics [
5,
6,
7,
8], leading to unexpected torque ripples. A solution, named maximum torque per ampere (MTPA), with optimal currents for healthy mode obtained in [
9,
10,
11] was compared with the proposed scheme using an Adaline in the first part of this study [
12].
When phases are open-circuited, the number of active phases is reduced and the repartition of harmonics of the current in different d-q frames is no more verified. Currents are no longer properly controlled as in healthy mode due to the coupling between reference frames, leading to the requirement of new reference currents. In addition, the impact of multi-harmonics in back-EMFs on torque quality becomes more complex than in the healthy condition since new harmonics are generated in each two-dimensional reference frame. A review of literature showed that there are many strategies which determine new reference currents to generate smooth torque under faulty conditions. These strategies can be classified into three main approaches as follows.
In the first approach, new current references are determined in a natural frame. This means that new reference currents of the remaining healthy phases are directly determined. The main advantage of the first approach is that a constant torque can be theoretically obtained regardless of multi-harmonics in NS-EMFs by considering a very large width band of current controllers. Conventionally, optimal currents with lowest copper losses can be calculated by MTPA for faulty mode in [
9,
10] or [
11]. Specifically, ref. [
9] applies Lagrangian multipliers and [
10] uses the vectorial approach while [
11] takes advantage of an Adaline. However, despite using different approaches, optimal reference currents in [
9,
10,
11] are the same. These currents have high-frequency oscillating values in d-q frames, posing challenges for current control with PI controllers at high speed. In addition, current waveforms as well as copper losses of the remaining healthy phases are unidentical, possibly leading to the overheating of the remaining phase windings. Recently, ref. [
13] for five-phase PMSMs and [
14] for general multiphase PMSMs applied the instantaneous power approach to determine additional components to phase currents, reducing torque ripples in faulty modes. The approach in [
13,
14] has been verified by finite element without considering controllers. As in [
9,
10,
11], studies [
13,
14] result in varying reference to d-q currents.
In the second approach, main reference d-q currents, generating most of the torque, are kept constant as in healthy mode. The second approach can facilitate current control of main d-q currents with PI controllers at high speed. However, other d-q currents which generate marginal torques are forcedly time-variant. These varying d-q currents not only cause control problems at high speed but also create inevitable torque ripples with multi-harmonic NS-EMFs. Indeed, in [
15,
16] for multiphase induction machines and in [
17,
18,
19] for five-phase PMSMs, only sinusoidal back-EMFs have been considered, hence, constant torque can be obtained. In [
20], with more degrees of freedom in seven-phase PMSMSs, NS-EMFs with the first and third harmonics can generate smooth torque. However, in [
21], NS-EMFs contain three harmonics, the torque ripple is high (>30% in [
21]) due to the interaction between the varying d-q currents and corresponding harmonics of NS-EMFs. Therefore, the second approach cannot properly deal with multi-harmonics existing in NS-EMFs.
Finally, the third approach uses new transformation matrices to find new reference currents. Indeed, when one phase is open-circuited, a
n-phase machine can be considered as a (
n − 1)-phase machine with reduced-order Clarke and Park transformation matrices. For example, studies [
22,
23] proposed new matrices for sinusoidal back-EMF multiphase machines but these studies cannot be applied for NS-EMF machines due to high-ripple torque. A strategy using two Clarke and two Park matrices can be found in [
24] for five-phase NS-EMF PMSMs in which the first and third harmonic components of current and NS-EMFs are considered to generate smooth torque. Meanwhile, studies [
25,
26] use only one Clarke and one Park matrix to generate non-sinusoidal reference currents. However, the control challenge of varying reference d-q currents in [
24,
25,
26] is similar to strategies in the first approach. Recently, ref. [
27] proposed a control scheme using new transformation matrices and an Adaline in which constant reference d-q currents can be used for control in faulty mode, keeping PI controllers as in healthy mode. However, in general, the third approach cannot eliminate torque ripples caused by plenty of harmonics in NS-EMFs.
In the three above approaches, only the first approach with the conventional MTPA strategy can generate smooth torque under the impact of multi-harmonics in NS-EMFs. Therefore, MTPA strategy will be used to compare with the proposed strategy and control scheme in this study. As previously mentioned, the control of varying reference d-q currents at high speed and unidentical copper losses in the remaining healthy phases are challenges for MTPA strategy. Controllers whose bandwidth increases with the rotating speed have been used to control varying currents. Specifically, hysteresis controllers have been used in [
9,
10] but these controllers lead to variable switching frequencies, high switching losses, and electromagnetic compatibility problems. Resonant PI (PIR) controllers can be another solution to track varying currents in [
25,
26] for five-phase PMSMs and [
28,
29] for five-phase induction machines. However, PIR requires accurate frequency estimations and tuning procedures with many parameters. Therefore, in faulty mode, the existing MTPA strategy used in the conventional RFOC scheme with PI controllers will be utilized to compare with the proposed control scheme in this study.
In this part of the study, a control scheme is proposed for multiphase machines considering multi-harmonics of NS-EMFs in a post-fault operation. The proposed control scheme for the post-fault operation combines the conventional RFOC technique using PI controllers, one Adaline, and a fault-tolerant strategy with equal copper losses (ECL). The Adaline is used owing to its self-learning, fast convergence, and simplicity [
27,
30]. It exploits the information about the rotor position and torque harmonic components to adaptively eliminate torque ripples. Therefore, smooth torque can be obtained regardless of multi-harmonic NS-EMFs. Compared with PIR, the Adaline has less parameters (only learning rate) which need to be properly chosen, other parameters of Adaline can be automatically updated. In addition, compared with the conventional RFOC using MTPA strategy [
9,
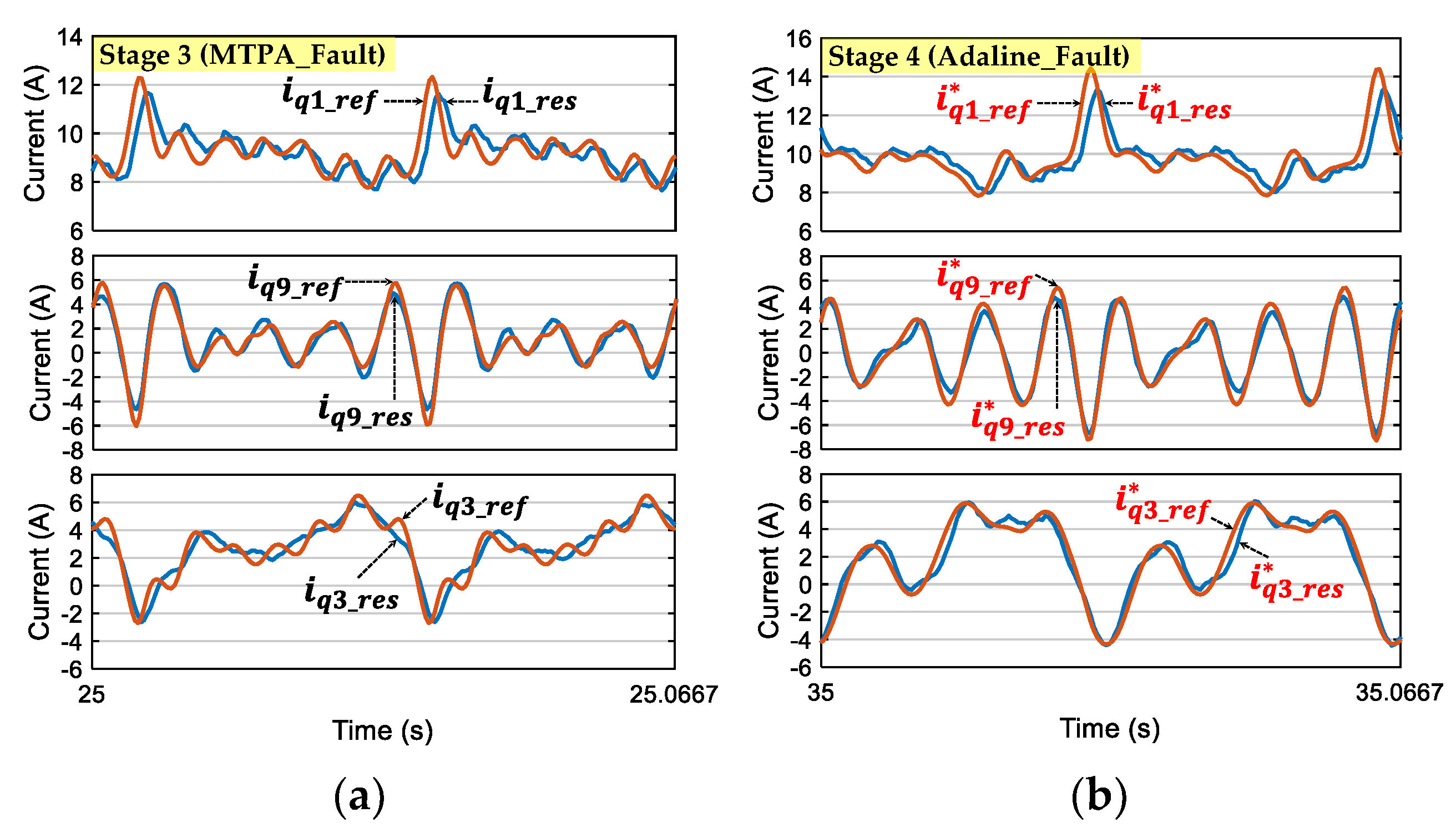
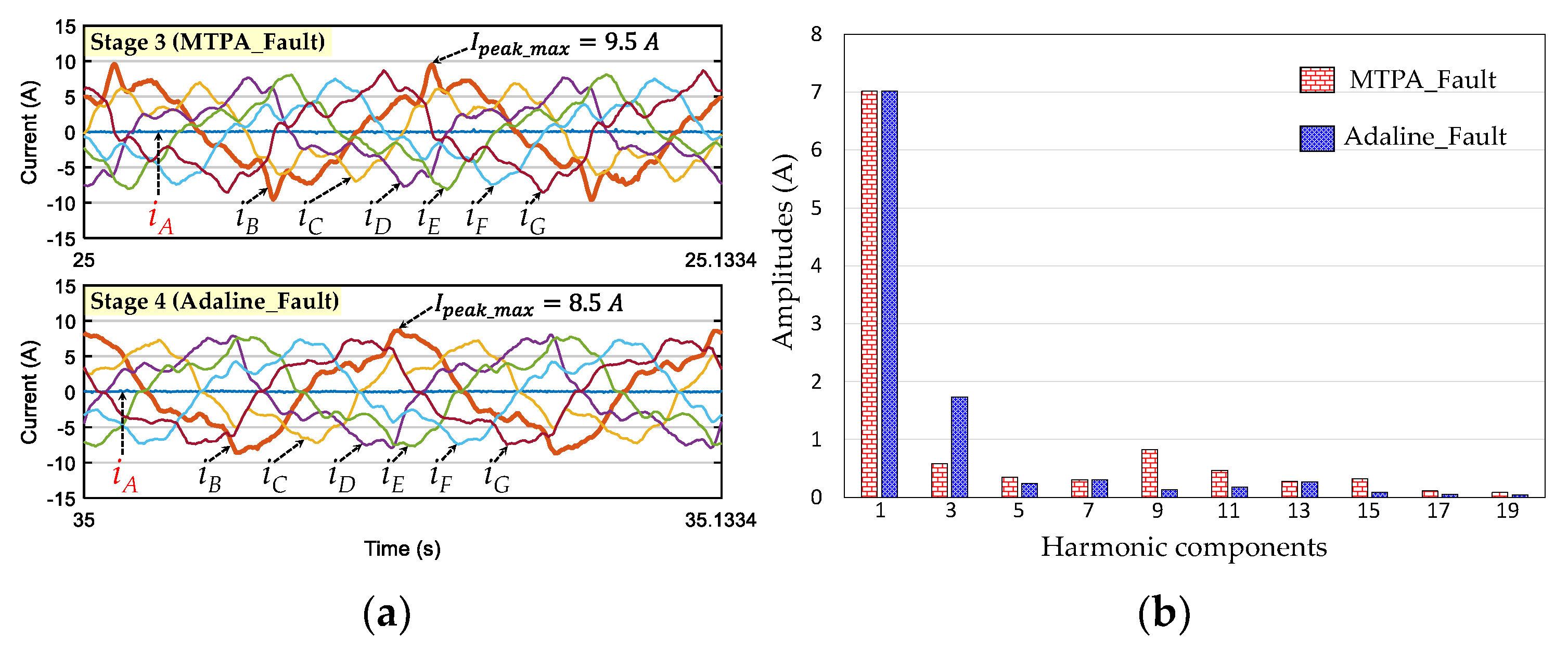
10], ECL strategy used in the proposed Adaline-based control scheme allows more similar copper losses in the remaining healthy phases, avoiding the overheating of the remaining phase windings. Besides, with the proposed control scheme, new reference d-q currents have less high-order harmonic components. Therefore, the proposed Adaline-based control scheme with ECL strategy has higher control quality and phase currents in the remaining healthy phases containing less high-frequency harmonics.
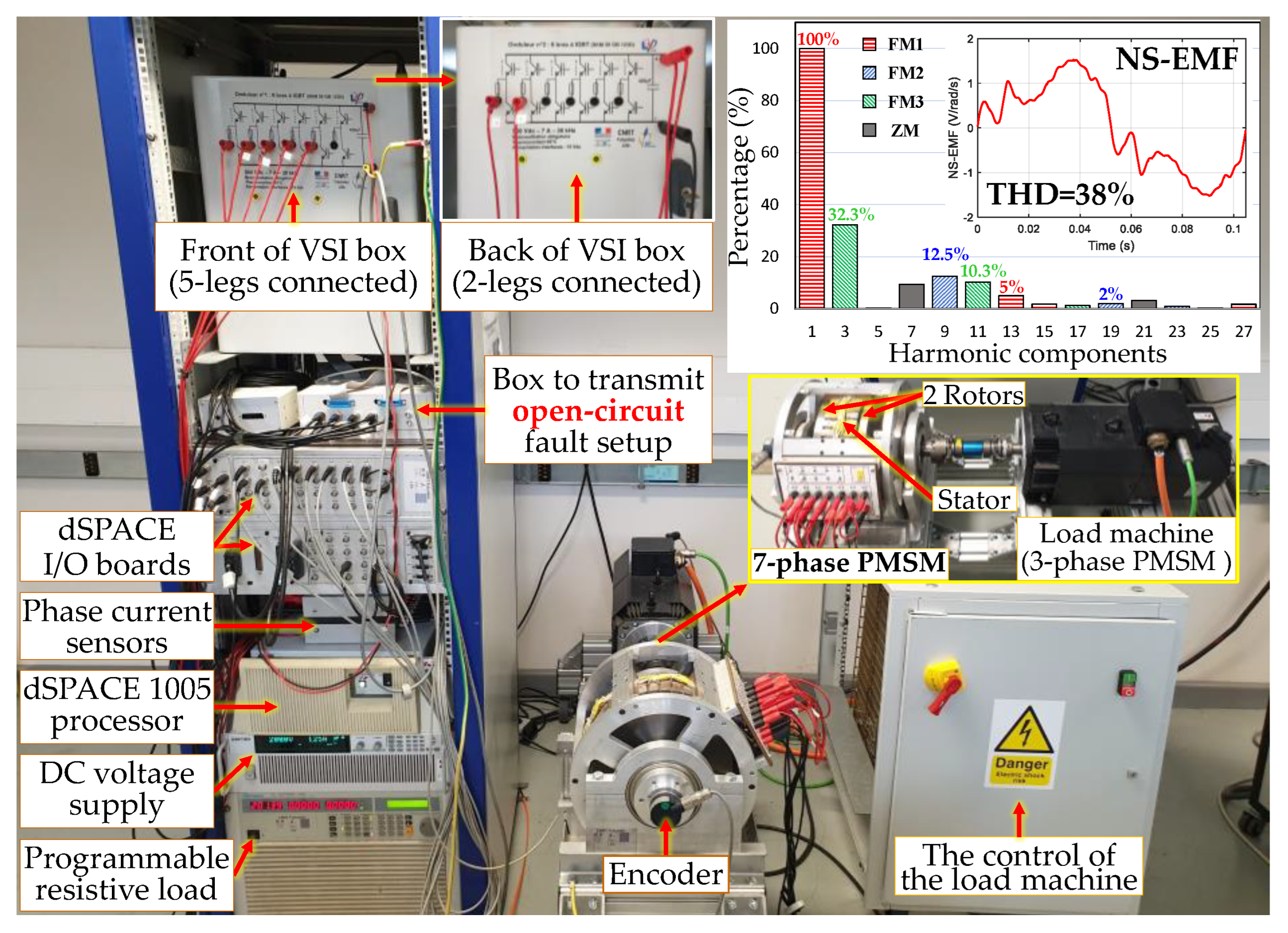
The proposed Adaline-based control scheme using ECL strategy is numerically and experimentally tested on a seven-phase PMSM with a high THD of NS-EMFs. As previously mentioned, the proposed scheme is compared with the conventional RFOC using the MTPA strategy to prove its superiority. A single-phase open-circuit condition is presented but this proposed scheme can guarantee smooth torque for more opened phases. Moreover, these schemes are applicable to any electric machine with an arbitrary number of phases. A
Video S1 to demonstrate the operation of the experimental test bench is provided with this part of the study.
This paper is organized as follows. Modeling of a seven-phase machine, previously presented in part I of this study, is briefly re-described in
Section 2. The conventional RFOC scheme using MTPA for faulty mode is discussed in
Section 3.
Section 4 describes the proposed control scheme using an Adaline and ECL strategy for faulty mode. Numerical and experimental results are presented in
Section 5.
2. Modeling of a Seven-Phase PMSM
To model and control a seven-phase PMSM, several assumptions are considered as follows: seven star-connected phase windings are equally shifted; NS-EMFs consist of more than (n − 1)/2 = 3 harmonics with the highest proportions belonging to 1st, 3rd, and 9th; and the saturation of magnetic circuits is not considered in NS-EMF and flux calculations.
The phase voltages can be expressed as follows:
where
v,
i, and
esn are the 7-dimensional vectors of phase voltages, phase currents, and speed-normalized NS-EMFs, respectively;
R is the resistance of the stator winding of one phase; [
L] is the 7-by-7 stator inductance matrix; and Ω is the rotating speed of the rotor.
In the conventional RFOC technique, Clarke and Park matrices [
4,
10,
20,
21] are applied to transform parameters of the machine from natural frame into decoupled rotor reference frames (d-q frames), as previously presented in the first part of this study. With the considered seven-phase prototype, the 1st, 3rd, and 9th harmonics have the highest amplitudes in NS-EMFs, leading to the transformation for currents as follows:
where
idq is the 7-dimensional vector of currents in d-q frames; (
id1,
iq1), (
id9,
iq9), (
id3,
iq3), and
iz are currents in two-dimensional frames (
d1-
q1), (
d9-
q9), (
d3-
q3), and zero-sequence frame
z, respectively; [
T] and [
P] are the 7-by-7 Clarke and Park transformation matrices, respectively (see part I of this study).
Consequently, a seven-phase machine is mathematically decomposed into 3 two-phase fictitious machines (FM1, FM2, and FM3) and 1 zero-sequence machine (ZM), corresponding to reference frames (
d1-
q1), (
d9-
q9), (
d3-
q3), and
z [
4]. In healthy mode, a fictitious machine with its corresponding d-q frames is associated with a group of harmonics in natural frame as described in
Table 1. Therefore, harmonic orders presenting in d-q frames of currents or NS-EMFs can be 0 (constant component), 14th, and 28th, as previously described in the first part of this study.
In healthy condition, if there is only one harmonic of NS-EMFs per FM, currents (id1, iq1, id9, iq9, id3, and iq3) are constant to generate constant torque, facilitating the use of PI controllers in the conventional RFOC scheme. When an open-circuit fault happens, the decoupled reference frames become coupled frames. A constant torque is only guaranteed when new complex reference currents are determined.
As previously discussed in the first part of this study, NS-EMFs may contain more than one harmonic per FM. In this case, new reference currents for the post-fault operation are more complex. To see impacts of multi-harmonics in NS-EMFs in faulty mode, it is assumed that there are two associated harmonics per FM. Specifically, the considered prototype has the following harmonics:
The 1st and 13th are associated with FM1;
The 9th and 19th are associated with FM2;
The 3rd and 11th are associated with FM3.
In addition, it is assumed that the 1st harmonic of NS-EMFs has the highest amplitude, followed by the 3rd harmonic. Harmonics associated with ZM (7k) have no impact on torque generation due to the star connection (iz = 0).
The speed-normalized NS-EMF of one phase can be rewritten as:
where (
En1,
En13,
En9,
En19,
En3, and
En11) and (
φ1,
φ13,
φ9,
φ19,
φ3, and
φ11) are the speed-normalized amplitudes and initial phase angles of back-EMF harmonics 1st, 13th, 9th, 19th, 3rd, and 11th, respectively;
j is the phase number from 1 to 7 or from
A to
G; and
θ is the electrical rotor position.
From (1)–(3), the total electromagnetic torque of the machine
Tem can be expressed as follows:
where
TFM1,
TFM2, and
TFM3 are the torques of
FM1,
FM2, and
FM3, respectively; and
edq is the 7-dimensional vector of NS-EMFs in d-q frames.
4. Proposed Adaline-Based Control Scheme for Faulty Mode
4.1. New Reference Currents with Equal Copper Losses (ECL)
The approach with ECL in the remaining healthy phases was firstly presented in [
15] for S-EMFs and sinusoidal currents under an open-circuit fault. The total copper losses are minimized under the constraint on identical amplitudes of the remaining phase currents. In this study, the proposed control scheme for faulty mode is based on ECL strategy but for NS-EMFs and non-sinusoidal currents. New reference phase currents of the remaining healthy phases have the same non-sinusoidal waveform (identical amplitudes and harmonic spectrums). Especially, under a constraint on RMS currents, the identical waveform currents of the remaining healthy phases can generate more torque. In other words, these new reference currents can guarantee copper losses similarly distributed in the remaining healthy phases, avoiding the overheating of phase windings.
For a S-EMF multiphase machine, sinusoidal currents with identical waveforms can be imposed to generate constant torque in faulty mode [
15]. With a NS-EMF machine, the presence of torque ripples is inevitable due to the interaction between the 1st harmonic of currents and high-order harmonics of NS-EMFs.
It is assumed that phase
A is open-circuited. To simply analyze the torque generation, the speed-normalized NS-EMFs in (3) with only two highest amplitude harmonics (1st in FM1 and 3rd in FM3) can be written as follows:
where
ke is the amplitude ratio of the 3rd harmonic to 1st harmonic of NS-EMFs (
ke = En3/
En1); and
φe is the phase shift angle between the 3rd and 1st harmonics of NS-EMFs (
φe = φ3 −
φ1).
New sinusoidal reference currents for the six remaining healthy phases are given by:
where
Im1 is the amplitude of the 1st harmonic of the six remaining healthy phase currents;
φB,
φC, and
φD are initial phase angles of currents in phases
B,
C, and
D, respectively.
From (4), (6) and (7), the electromagnetic torque
Tem is expressed by:
where
Tave is the average torque; and
T2θ and
T4θ are torque ripples with harmonics 2
θ and 4
θ, respectively.
From (8), the total torque contains a constant component
Tave and harmonic components
T2θ and
T4θ. With S-EMFs,
ke is zero, the total torque becomes constant when the first term of
T2θ is nullified. In this case, the required values of
φB,
φC, and
φD are described as follows:
With NS-EMFs, the presence of the 3rd harmonic (
ke > 0) generates an additional term in
T2θ and the entire harmonic
T4θ. These harmonic components cannot be simultaneously eliminated with sinusoidal currents (no solution). In this case, an injection of the 3rd harmonic of currents can improve the torque quality. Indeed, new non-sinusoidal reference currents containing the 1st and 3rd harmonics for the remaining healthy phases are proposed as follows:
where
ki and
φi are the amplitude ratio and the phase shift angle of the 3rd harmonic to 1st harmonic of currents, respectively.
From (4), (6) and (10), the total torque generated by NS-EMFs and non-sinusoidal currents can be expressed by:
It is noted that the total torque in (11) contains an average torque Tave (constant) and three harmonic components T2θ, T4θ, and T6θ. Due to the 3rd harmonic of currents with ki, the average torque Tave increases an amount proportional to (keki). Meanwhile, the torque harmonics T2θ, T4θ, and T6θ cannot be simultaneously eliminated because there are no solutions under the constraint on identical current waveforms in the six remaining healthy phases in (10). For the sake of simplicity, the initial phase angles in (9) can be used to eliminate the first term of T2θ which has the highest amplitude.
The corresponding torque components in (11) with the initial phase angles in (9) are expressed by:
From (12), the average torque increases an amount of [1.76kekiIm1En1cos(φi − φe)] when the 3rd harmonic of currents are injected. The amplitudes of torque harmonics (T2θ, T4θ, and T6θ) are proportional to ke and ki. The phase shift angle φi must be equal to φe to maximize the average torque Tave. The amplitude ratio ki is equal to ke to minimize torque ripples and the rest of torque ripples will be eliminated by the proposed Adaline in the next subsection.
From
Tave in (12), the amplitude of the 1st harmonic of reference phase currents can be expressed as:
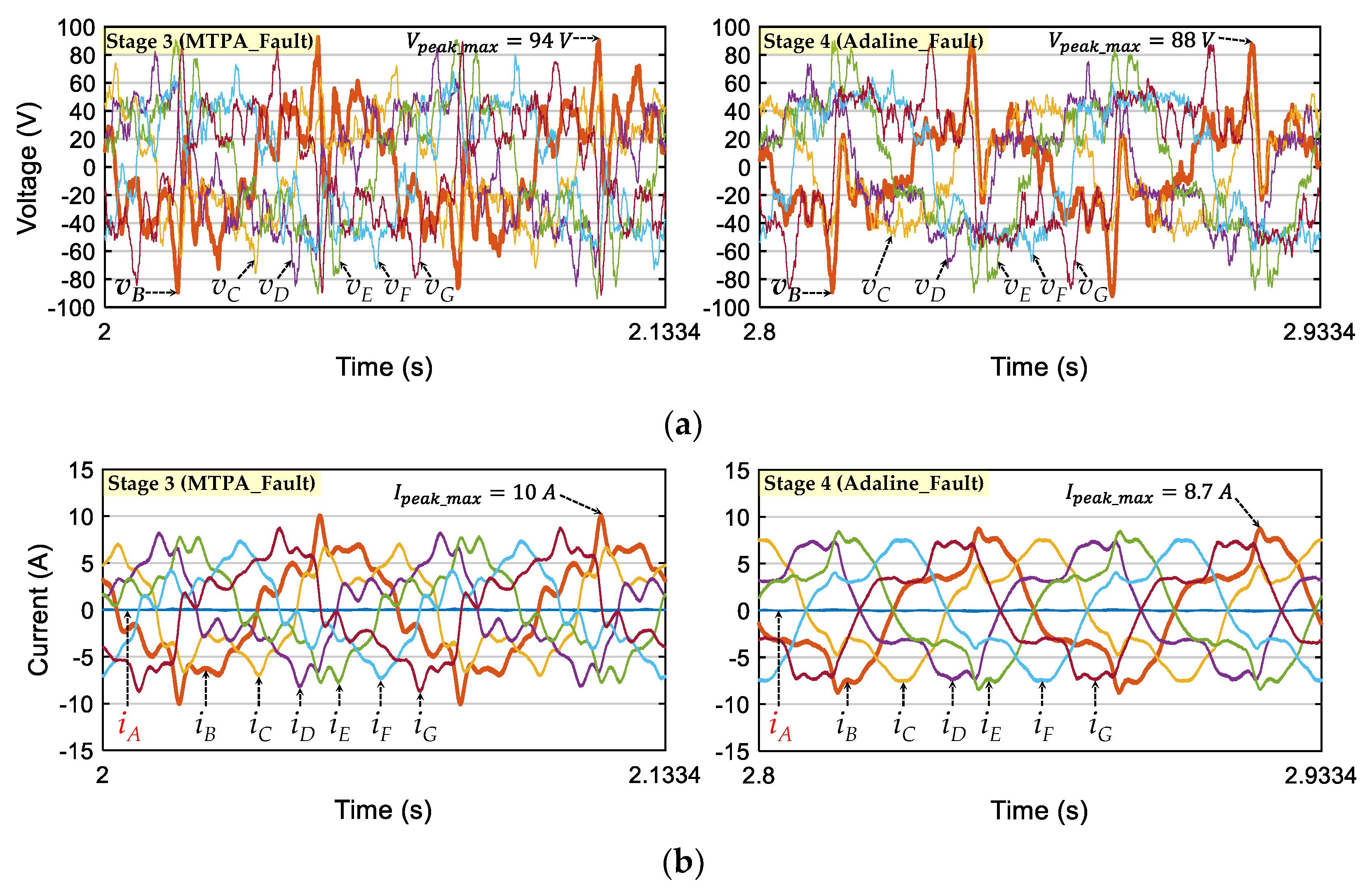
Finally, to generate an average torque Tave, reference non-sinusoidal phase currents for the remaining healthy phases can be determined by using (9), (10) and (13). When NS-EMFs contain only the 1st and 3rd harmonics, the torque ripples with sinusoidal currents include two harmonics 2θ and 4θ as described in (8). Meanwhile, with the injection of the 3rd harmonic of currents, there are three harmonics 2θ, 4θ, and 6θ as described in (11).
In the considered seven-phase prototype, NS-EMFs contain six harmonics as previously assumed in
Section 2. Therefore, eleven torque harmonics possibly generated by the interaction between NS-EMFs in (3) and non-sinusoidal currents in (10) are described in
Table 2. In general, for a
n-phase machine under a faulty condition, there will be
h possible harmonics of torque with the rank of 2
jθ (
). When more than one phase is open-circuited, the harmonic ranks of torque ripples are the same. This part of the study focuses on single-phase open-circuit faults considering a constraint on identical waveforms of the remaining healthy phase currents (ECL strategy).
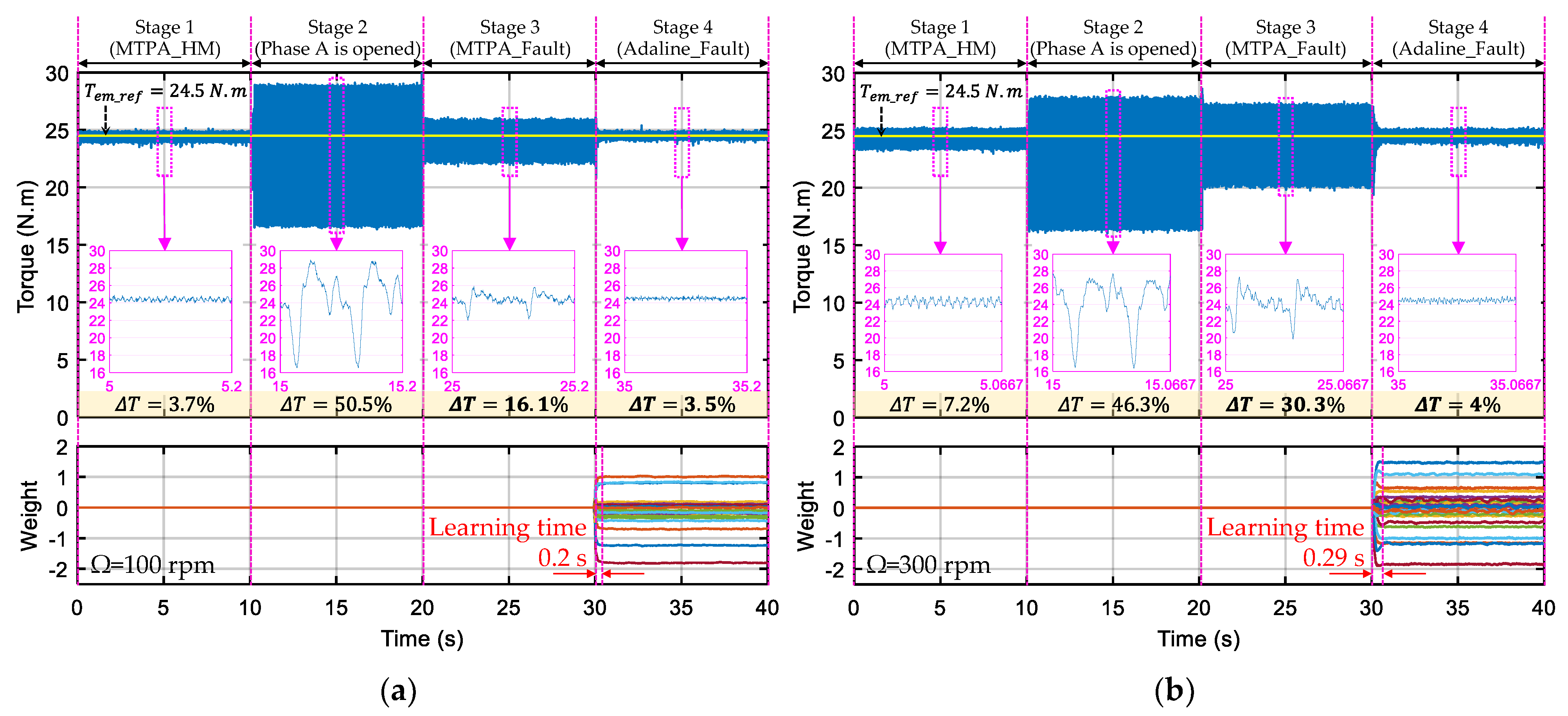
4.2. Proposed Control Scheme for Faulty Mode
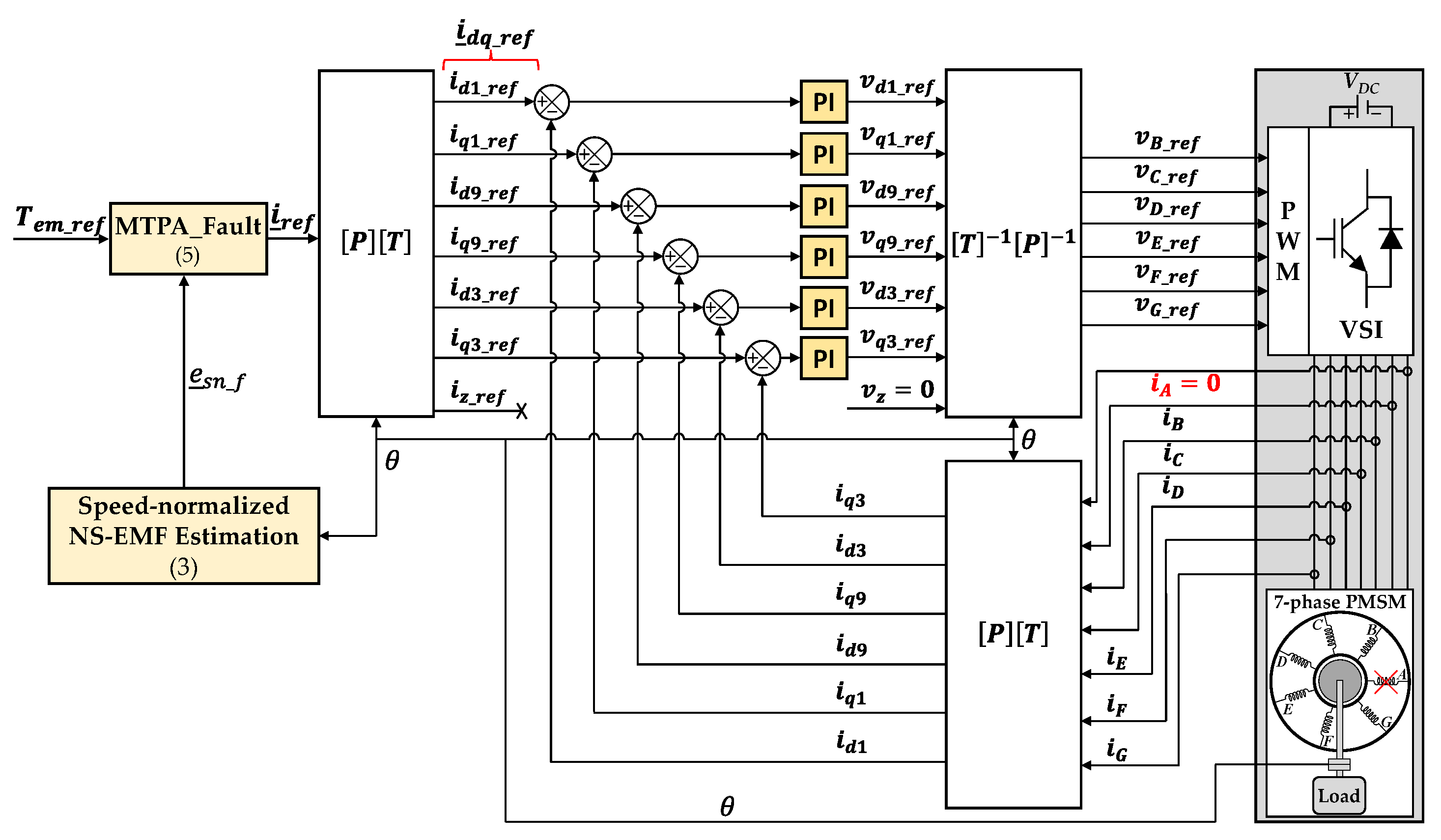
The proposed control scheme for faulty mode described in
Figure 2 is based on the conventional RFOC scheme, an Adaline, and ECL strategy. New reference currents are determined by using ECL strategy as described in (9), (10) and (13) to generate an average torque
Tave equal to
Tem_ref. Then, compensating currents are adaptively added to identical waveform phase currents of ECL to eliminate torque ripples. Therefore, phase current waveforms are no longer identical but similar, leading to similar copper losses in the remaining healthy phases. These compensating currents are determined from the compensating torque
Tem_com that contains all harmonics or main harmonics of the torque in
Table 2. This compensating torque is determined by an Adaline (“Adaline_Fault”) that will be described in the next subsection. The total torque
Tem is calculated from measured phase currents and estimated NS-EMFs according to (4).
From
Tem_com, compensating currents can be calculated by using Simplified MTPA (SMTPA) that is discussed in the first part of this study as follows:
where
icom is the 7-dimensional vector of compensating currents in natural frame;
is the simplified NS-EMF vector created from
esn_f in (5) by keeping only 1st, 9th, and 3rd harmonics. Then, currents
icom in (14) are transformed into d-q frames
idq_com by using (2).
The total reference d-q currents (
) for control are combinations of reference d-q currents (
idq_ref) from ECL strategy and the compensating currents
idq_com as follows:
4.3. Structure of Adaline for Faulty Mode
The Adaline for faulty mode (“Adaline_Fault”) can adaptively determine compensating torque
Tem_com as well as compensating currents
icom, enabling the total torque
Tem to properly track reference torque
Tem_ref. It is assumed that the total torque
generated by using only ECL strategy can be expressed from
Table 2 as follows:
where
is the average torque;
and
are coefficients representing torque harmonics
, including its amplitude and initial phase angle; and
h is the number of torque harmonics.
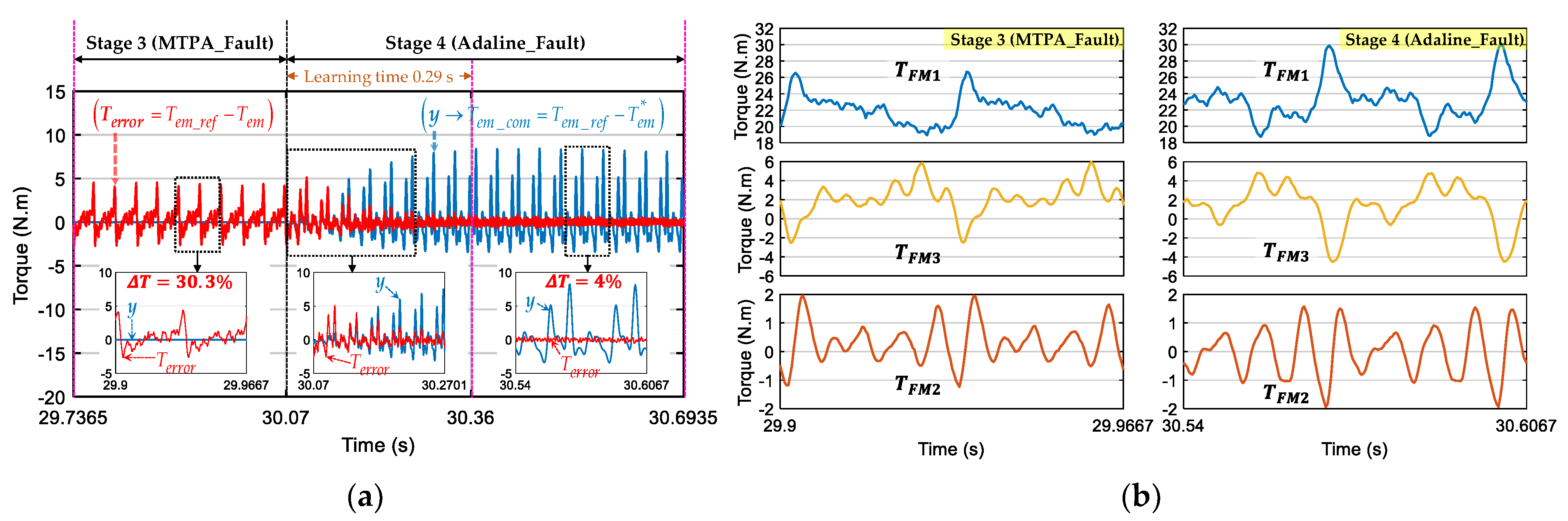
From (16), for a reference torque
Tem_ref, the compensating torque
Tem_com is given by:
where
is the difference between
Tem_ref and
. Therefore, the compensating torque
Tem_com is represented by (2
h + 1) coefficients from
to
and the electrical position
θ.
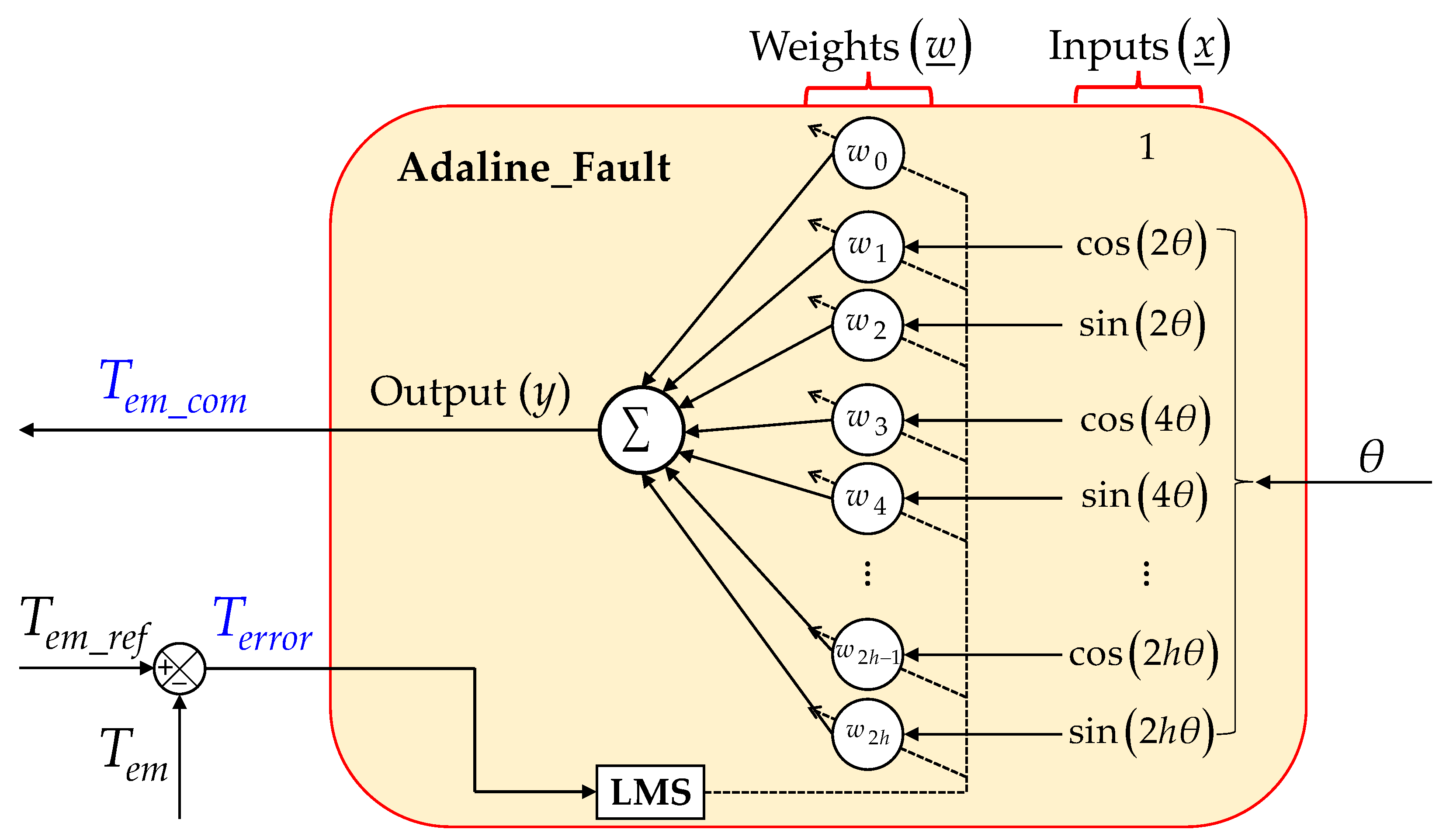
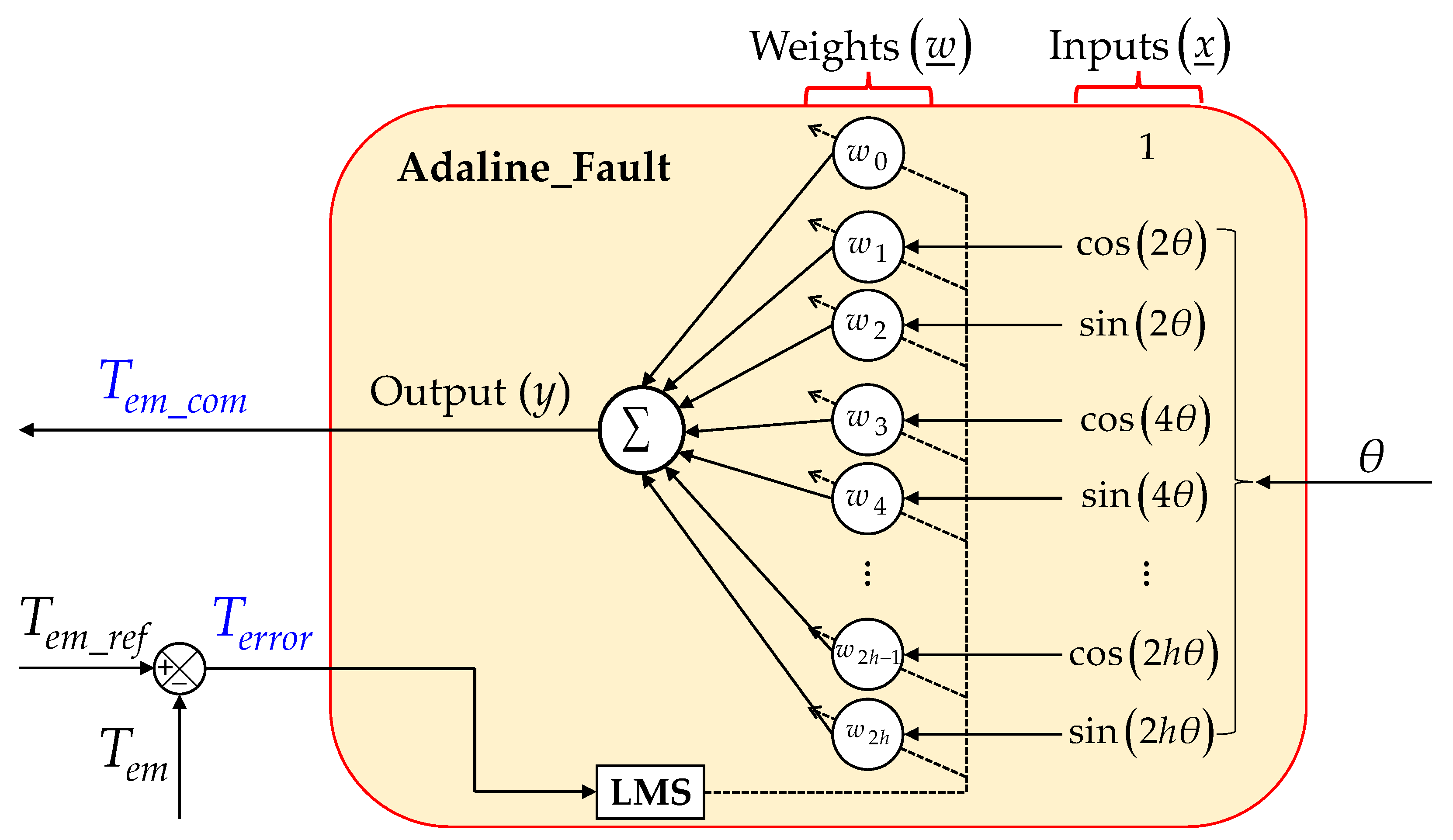
The structure of the Adaline used in
Figure 2 is described in
Figure 3. The input vector and the weight vector of the Adaline are defined by:
where
wj is a weight corresponding to coefficient
of the compensating torque
Tem_com in (17) with
.
The output of the Adaline is the weighted sum of the inputs as follows:
The Adaline weights are updated by the least mean square (LMS) rule at each sampled time
k as:
where
η is the learning rate;
Terror is the error between reference torque
Tem_ref and the total torque
Tem; and
Tem is calculated from measured phase currents and estimated NS-EMFs in (4).
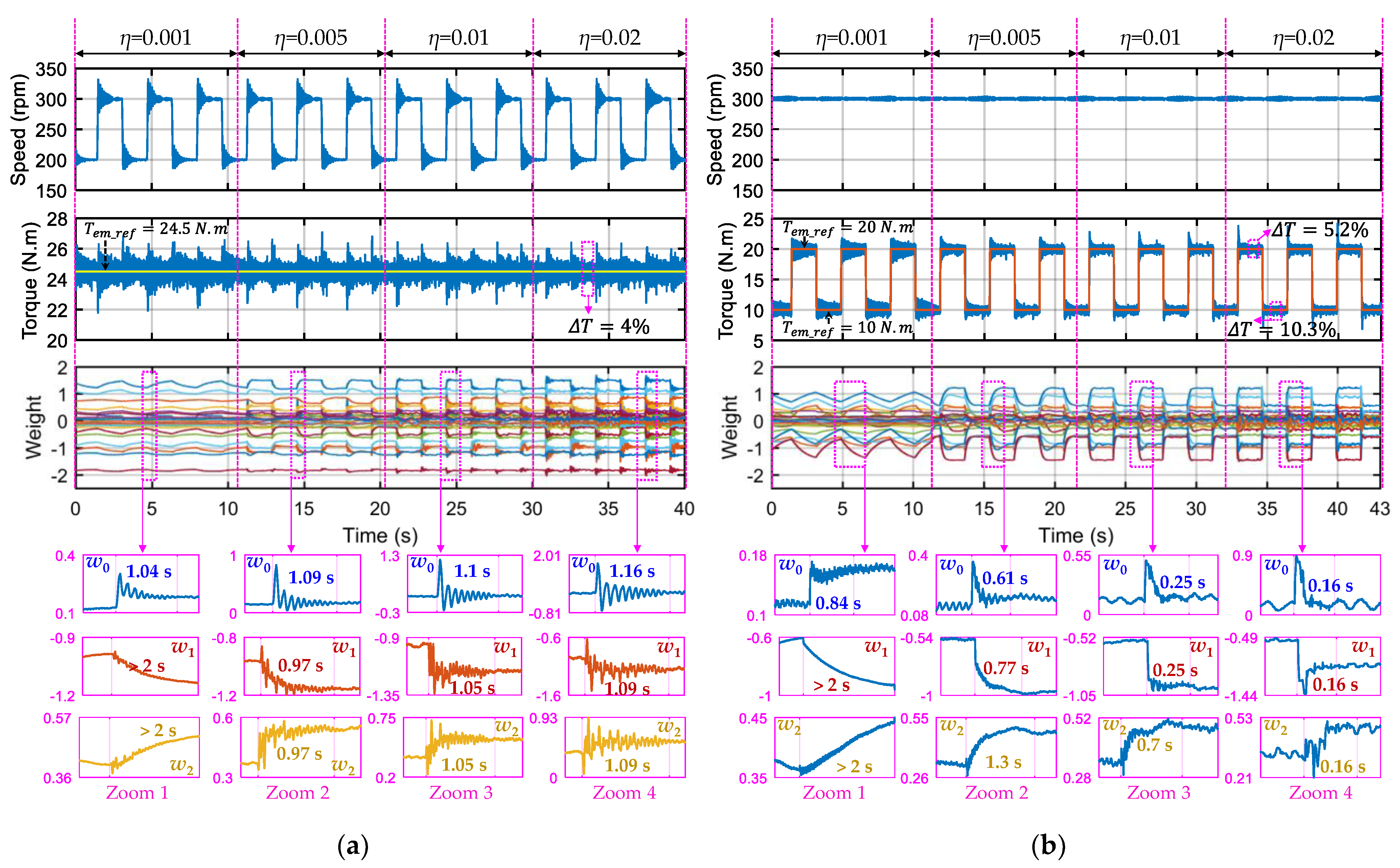
The learning rate
η is within 0 and 1 to guarantee the system stability [
31]. Its value mainly depends on the sample time of calculations, and characteristics of the desired signal (
Tem_com) such as amplitudes and phases of harmonic components. An increase in
η possibly results in faster convergence but divergence may appear. On each iteration, the Adaline weights are updated to converge to the coefficients of the compensating torque in (17). Weight convergence is obtained after a given number of iterations as:
where
and
with
are the coefficients of
Tem_com as described in (17).
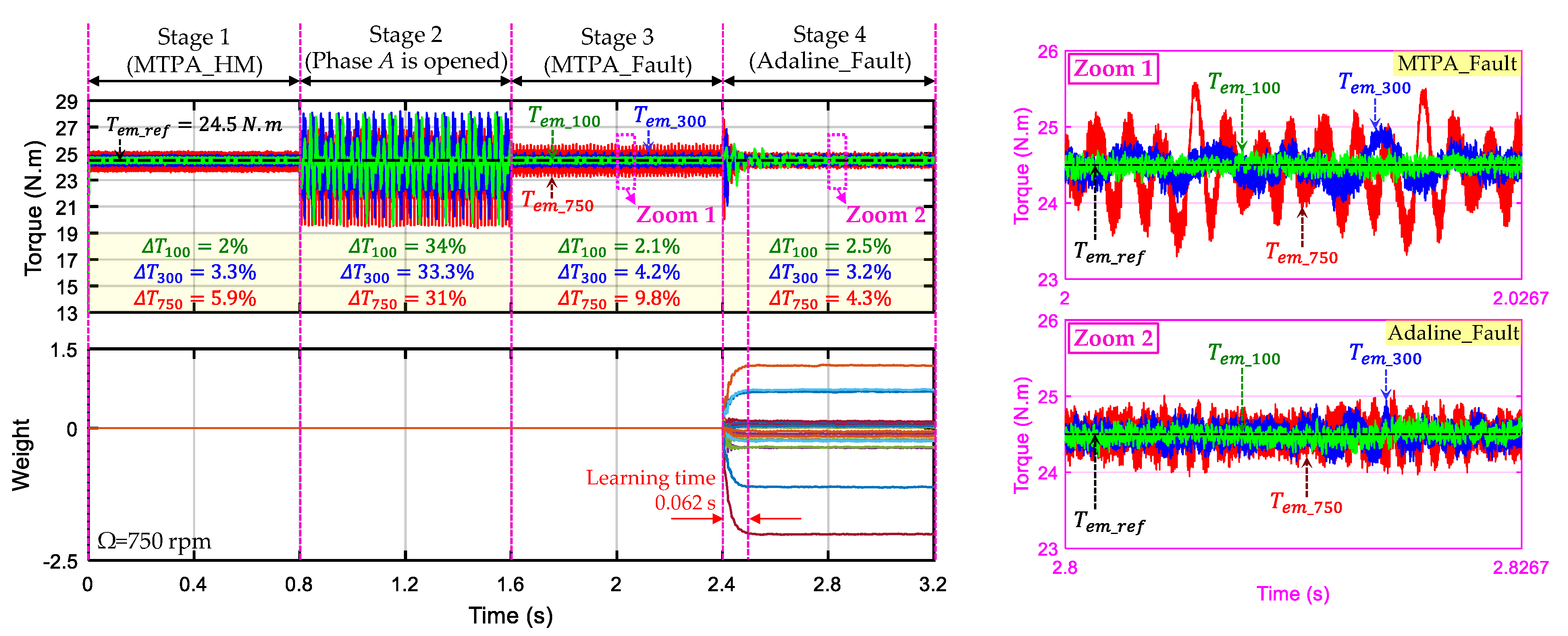
Finally, Terror is theoretically nullified, and the total torque Tem well tracks the reference torque Tem_ref. The proposed Adaline-based control scheme using ECL strategy can guarantee smooth torques in faulty mode regardless of multi-harmonics existing in NS-EMFs and impacts of the mechanical load.
Compared with PIR, the Adaline is simpler because only the learning rate must be properly chosen while other parameters are automatically updated. The knowledge of torque harmonic rank and rotor position is used to optimize the Adaline training. The inputs of Adaline_Fault contain only harmonics of the torque which are caused by the interaction of the six remaining phase currents with the NS-EMF harmonics. The task of the Adaline is relatively light because only existing torque harmonics can induce modifications of the corresponding Adaline weights. In addition, the number of harmonics as well as the number of weights in this fault-tolerant scheme can be reduced to simplify calculations if high torque quality is still guaranteed. If a harmonic of the torque ripples has very small amplitudes compared with the other harmonics and the average torque Tave, this harmonic can be neglected in the Adaline inputs. Practically, a S-function builder block in MATLAB/Simulink can be used to implement the Adaline.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}