Adaptive Multi-Model Switching Predictive Active Power Control Scheme for Wind Generator System



Abstract
1. Introduction
2. Fuzzy Clustering Modeling of the Field-Collected Wind Turbine Data
2.1. Mathematical Model of Variable Speed Variable Pitch Wind Turbine
2.2. Fuzzy Clustering of Data Sets
- Step 1: Determine the number of categories C and fuzzy weight index m, and initialize the clustering center V.
- Step 2: Calculate the fuzzy membership matrix U according to Equation (5).where uij is the membership of xi belonging to category j, and Vj or Vk is the clustering center of category j or k.
- Step 3: Calculate the category center Vj using Equation (6).
- Step 4: Calculate the objective value J of cluster Vj using Equation (7) and judge whether target value is met or not. If it is met, the clustering will end; otherwise, return to step 2.
2.3. Least Square Modeling
3. Design of the Generalized Predictive Controller
3.1. Objective Function
3.2. Output Prediction
3.3. Determination of the Optimal Control Law
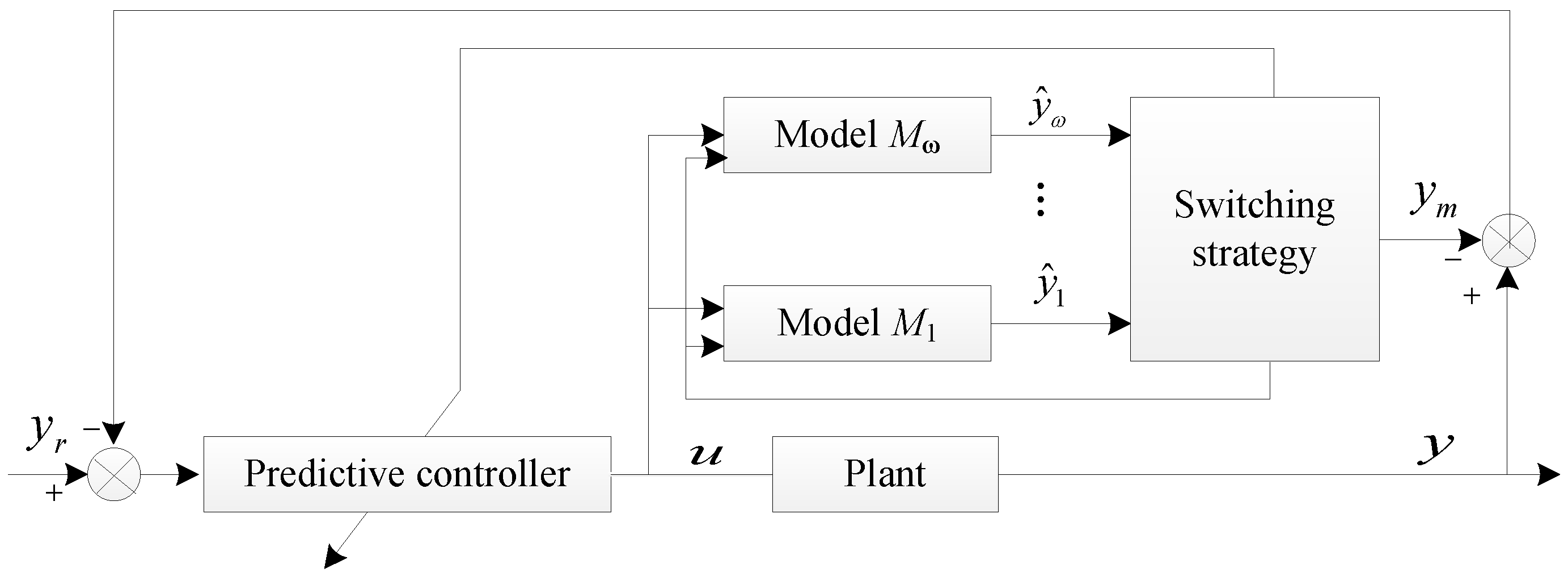
4. Multi-Model Switching Control
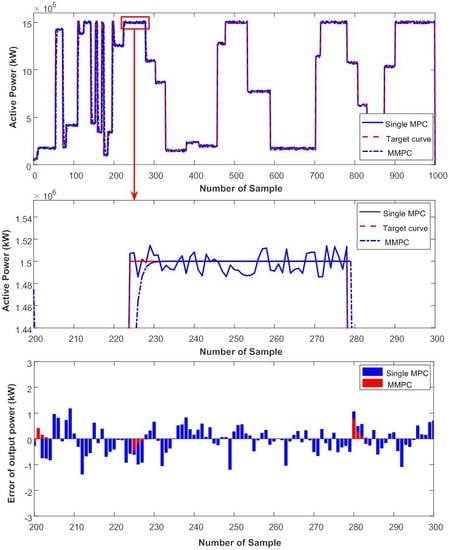
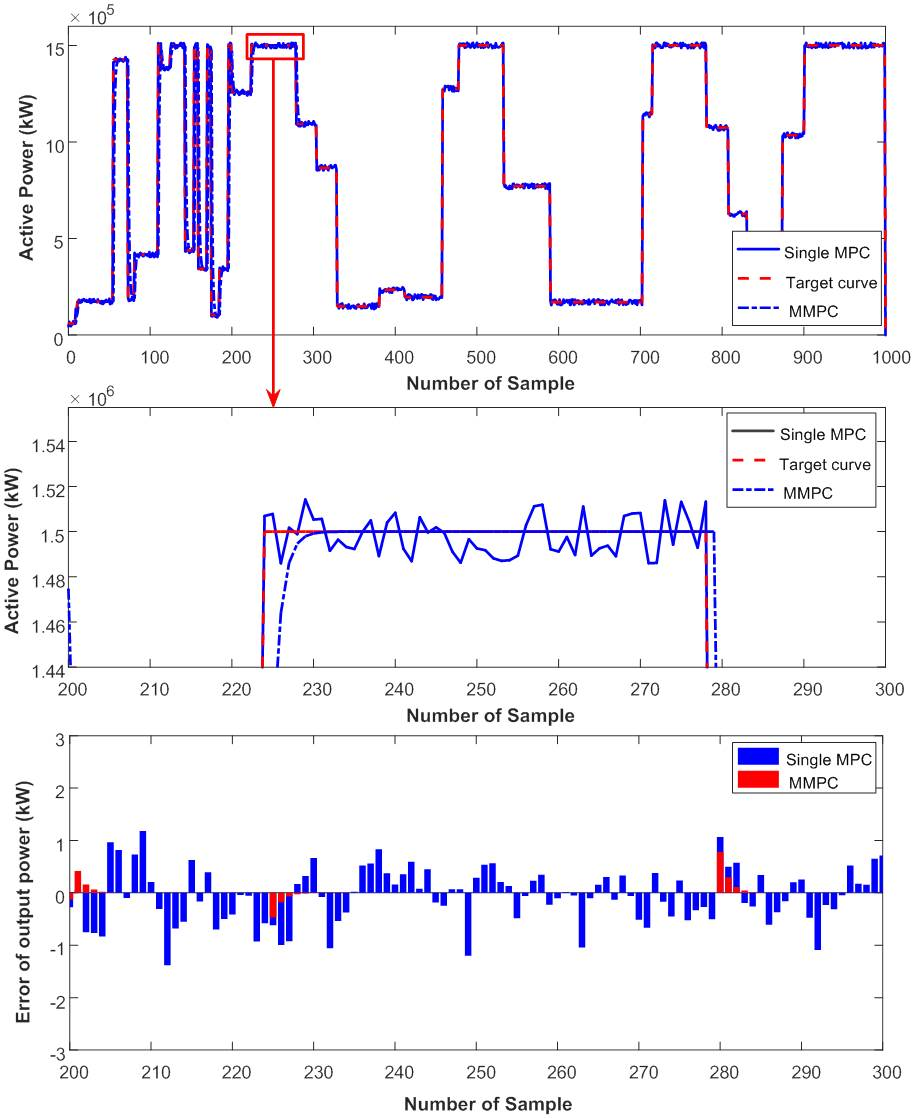
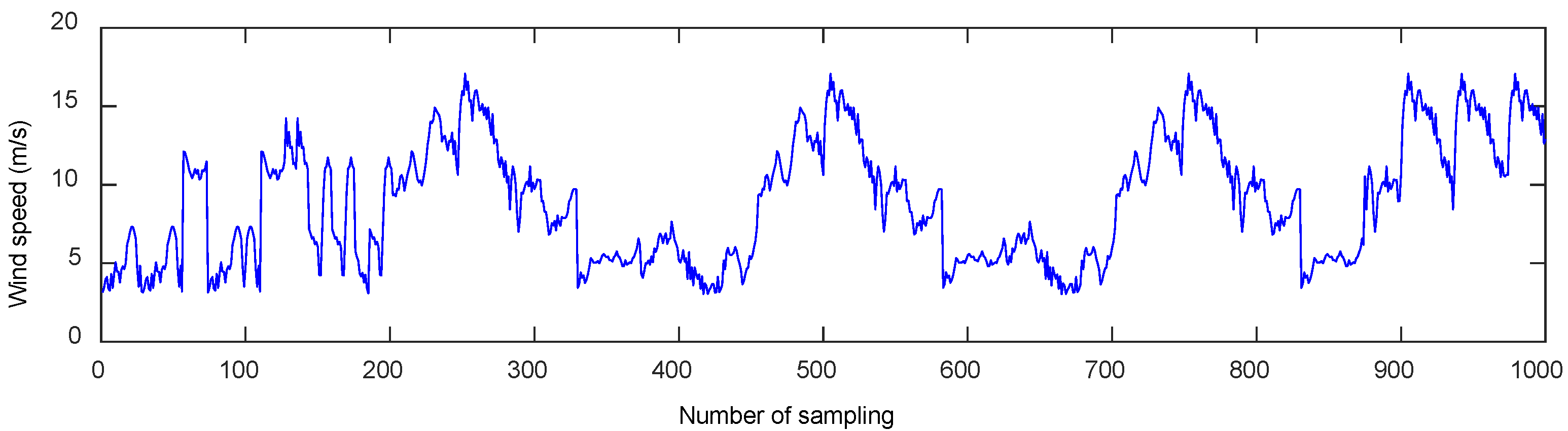
5. Case Study and Simulation Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
| Parameters of the Wind Turbine with DFIG Used for Case Study in Section 5 | |
| Rated power | 1.5 MW |
| Operation wind speed range | 3 m/s~25 m/s |
| Rated wind speed | 11 m/s |
| Semi-diameter of the rotor | 31.4 m |
| Air density | 1.225 kg/m3 |
References
- Gu, H.; Wang, J.; Lin, Q.; Gong, Q. Automatic Contour-Based Road Network Design for Optimized Wind Farm Micrositing. IEEE Trans. Sustain. Energy 2015, 6, 281–289. [Google Scholar] [CrossRef]
- Chen, J.; Hu, W.; Cao, D.; Zhang, B.; Huang, Q.; Chen, Z.; Blaabjerg, F. An Imbalance Fault Detection Algorithm for Variable-Speed Wind Turbines: A Deep Learning Approach. Energies 2019, 12, 2764. [Google Scholar] [CrossRef]
- Gao, X.; Meng, K.; Dong, Z. Cooperation-driven distributed control scheme for large-scale wind farm active power regulation. IEEE Transactions on Energy Conversion 2017, 32, 1240–1250. [Google Scholar] [CrossRef]
- Huang, S.; Wu, Q.; Guo, Y.; Rong, F. Optimal active power control based on MPC for DFIG-based wind farm equipped with distributed energy storage systems. Int. J. Electr. Power Energy Syst. 2019, 113, 154–163. [Google Scholar] [CrossRef]
- Arasteh, F.; Riahy, G.H. MPC-based approach for online demand side and storage system management in market based wind integrated power systems. Int. J. Electr. Power Energy Syst. 2019, 106, 124–137. [Google Scholar] [CrossRef]
- Liu, M.; Zou, J.; Peng, C.; Xie, Y.; Li, M. Active power control for wind farms based on MPC combined with state classification. IFAC-Pap. OnLine 2017, 50, 2137–2144. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, S.; Chai, Y.; Liu, Y.; Sun, X. Simulation of wind farm scheduling algorithm based on predictive model control. In Proceedings of the 2017 Chinese Intelligent Systems Conference, Mudanjiang, China, 14–15 October 2017. [Google Scholar]
- Liu, J.; Yao, Q.; Hu, Y. Model predictive control for load frequency of hybrid power system with wind power and thermal power. Energy 2019, 172, 555–565. [Google Scholar] [CrossRef]
- Guo, Y.; Gao, H.; Wu, Q.; Østergaard, J.; Yu, D.; Shahidehpour, M. Distributed coordinated active and reactive power control of wind farms based on model predictive control. Int. J. Electr. Power Energy Syst. 2019, 104, 78–88. [Google Scholar] [CrossRef]
- Mousa, H.H.H.; Youssef, A.R.; Mohamed, E.E.M. Model predictive speed control of five-phase permanent magnet synchronous generator-based wind generation system via wind-speed estimation. Int. J. Electr. Power Energy Syst. 2019. [Google Scholar] [CrossRef]
- Li, L.; Zhang, D. Model predictive control for wind farm integration through VSC-HVDC. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications, Wuhan, China, 1–2 June 2018. [Google Scholar]
- Mallick, A.; Singh, S.N.; Mohapatra, A. Active power regulation by MPC based flywheel energy storage system. Adv. Energy Power Syst. 2018, 508, 57–71. [Google Scholar]
- Lin, Z.; Chen, Z.; Liu, J.; Wu, Q. Coordinated mechanical loads and power optimization of wind energy conversion systems with variable-weight model predictive control strategy. Appl. Energy 2019, 236, 307–317. [Google Scholar] [CrossRef]
- Cui, J.; Liu, X. Economic model predictive control of variable-speed wind energy conversation systems. Control Eng. China 2019, 26, 431–439. (In Chinese) [Google Scholar]
- Ye, H.; Chen, C.; Li, S.; Ding, C. Model predictive current control of inverters to meet low-voltage ride-through requirements. Control Eng. China 2018, 25, 795–798. [Google Scholar]
- Fan, X.; Lei, M. Research on three-level wind power generation system based on predictive control. Electric Drive. 2018, 48, 8–11+36. [Google Scholar]
- Liu, X.; Wang, W.; Guo, J.; Guo, D. Research on predictive control of active power for direct-driven permanent magnet wind turbine generators. Acta Energ. Sol. Si. 2018, 39, 210–217. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, M.; Li, Y. Model predictive controller-based distributed control of wind turbine DC microgrid. Trans. China Electrotech. Soc. 2016, 31, 57–66. (In Chinese) [Google Scholar]
- Zhou, K.; Yang, S.; Ding, S.; Luo, H. On cluster validation. Syst. Eng. Theory Pract. 2014, 34, 2417–2431. [Google Scholar]
- Lu, X.; Wang, X.; Dong, H.; Ma, B. Research on Sliding Mode Predictive Control of Energy-saving Operation of High-speed Train. Control Eng. China 2016, 23, 389–393. [Google Scholar]
- Guo, Z.; Song, A.; Mao, J. Nonlinear generalized predictive control based on least square support vector machine. Control Decis. 2009, 24, 520–525. [Google Scholar] [CrossRef]
- Lu, X.; Dong, H. Application of multi-model active fault-tolerant sliding mode predictive control in solar thermal power generation system. Acta Autom. Sin. 2017, 43, 1241–1247. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Clustering | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|
| DBI | 1.4473 | 0.6923 | 0.1978 | 1.1791 | 0.9733 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Ren, K.; Li, S.; Dong, H. Adaptive Multi-Model Switching Predictive Active Power Control Scheme for Wind Generator System. Energies 2020, 13, 1329. https://doi.org/10.3390/en13061329
Li H, Ren K, Li S, Dong H. Adaptive Multi-Model Switching Predictive Active Power Control Scheme for Wind Generator System. Energies. 2020; 13(6):1329. https://doi.org/10.3390/en13061329
Chicago/Turabian StyleLi, Hongwei, Kaide Ren, Shuaibing Li, and Haiying Dong. 2020. "Adaptive Multi-Model Switching Predictive Active Power Control Scheme for Wind Generator System" Energies 13, no. 6: 1329. https://doi.org/10.3390/en13061329
APA StyleLi, H., Ren, K., Li, S., & Dong, H. (2020). Adaptive Multi-Model Switching Predictive Active Power Control Scheme for Wind Generator System. Energies, 13(6), 1329. https://doi.org/10.3390/en13061329