Improved Droop Control with Washout Filter


Abstract
1. Introduction
2. Frequency and Voltage Amplitude Deviations Analysis
2.1. Conventional Droop Controller
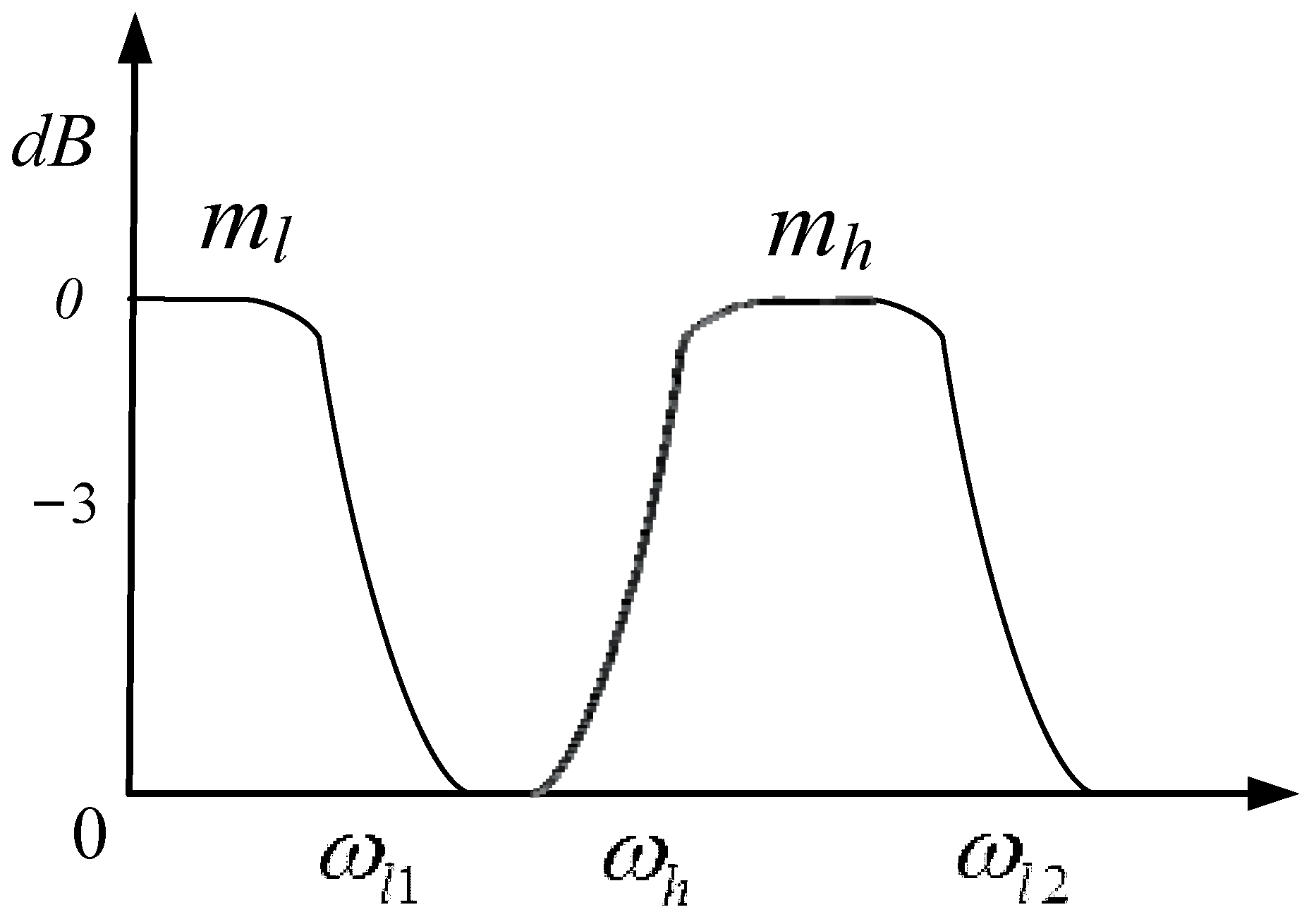
2.2. Washout Filter
3. Proposed Control Strategy
- The washout filter control [10] is equivalent to removing the parameter .
- The DWC is equivalent to the “PD” controller with and .
- The DWC is equal to the virtual synchronous generator control strategy with .
4. Small Signal Model
4.1. Differential Algebraic Equations
4.1.1. Load and Network Models
4.1.2. Singular Inverter Model
4.1.3. Combined Model of All Inverters
4.2. Algebraic Equations
4.3. Complete Microgrid (MG) Model
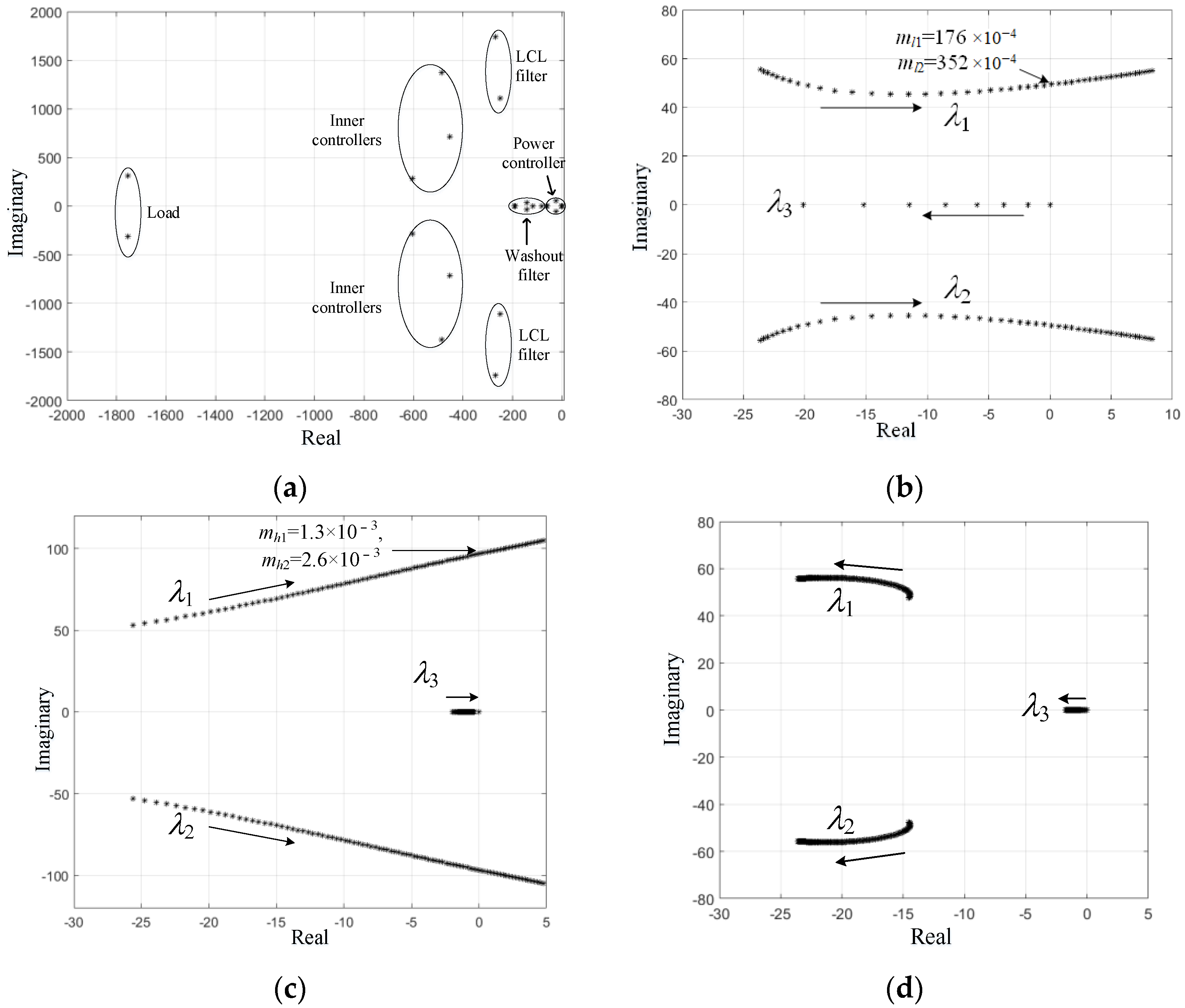
5. Stability Analysis
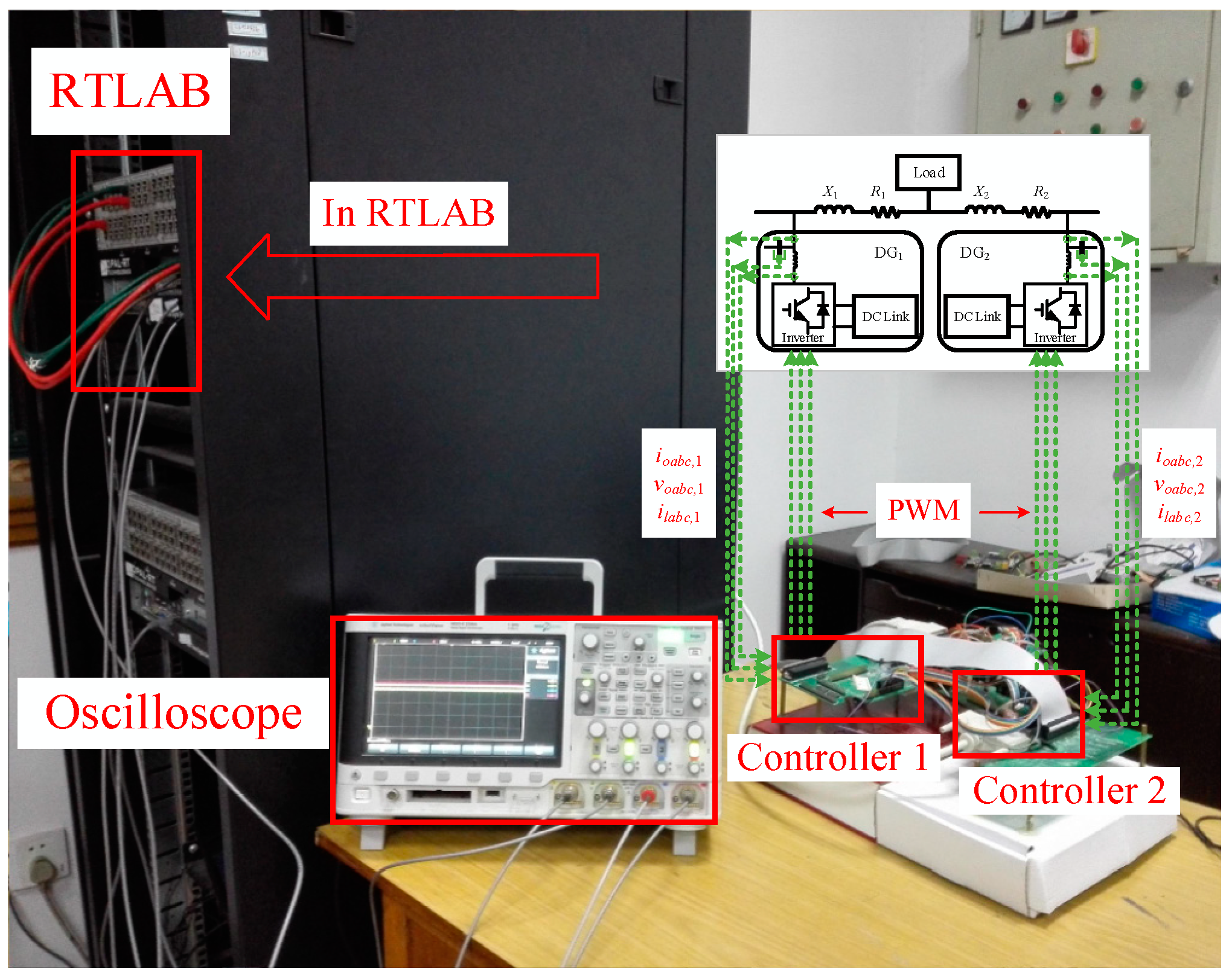
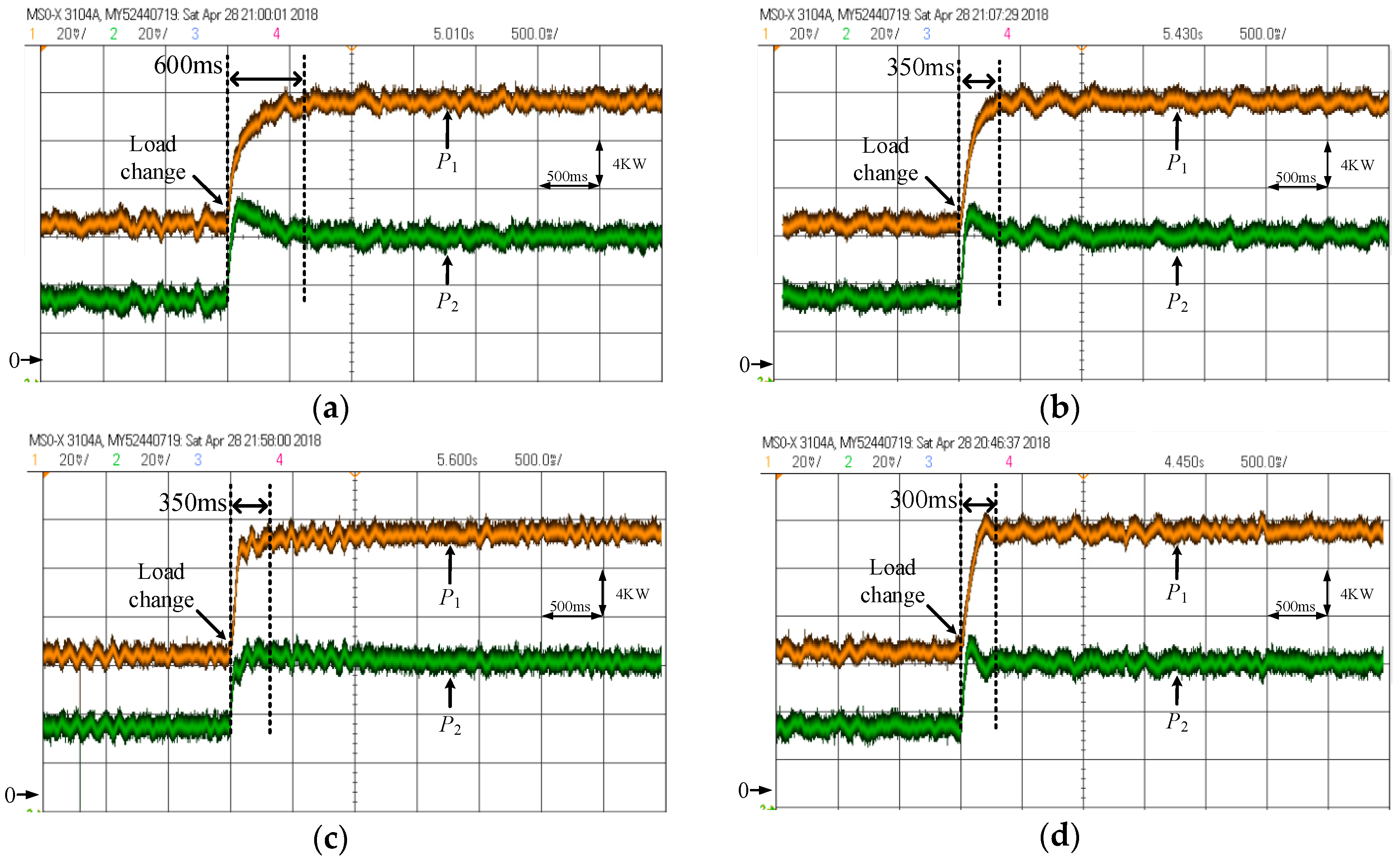
6. Real Time Simulation Results
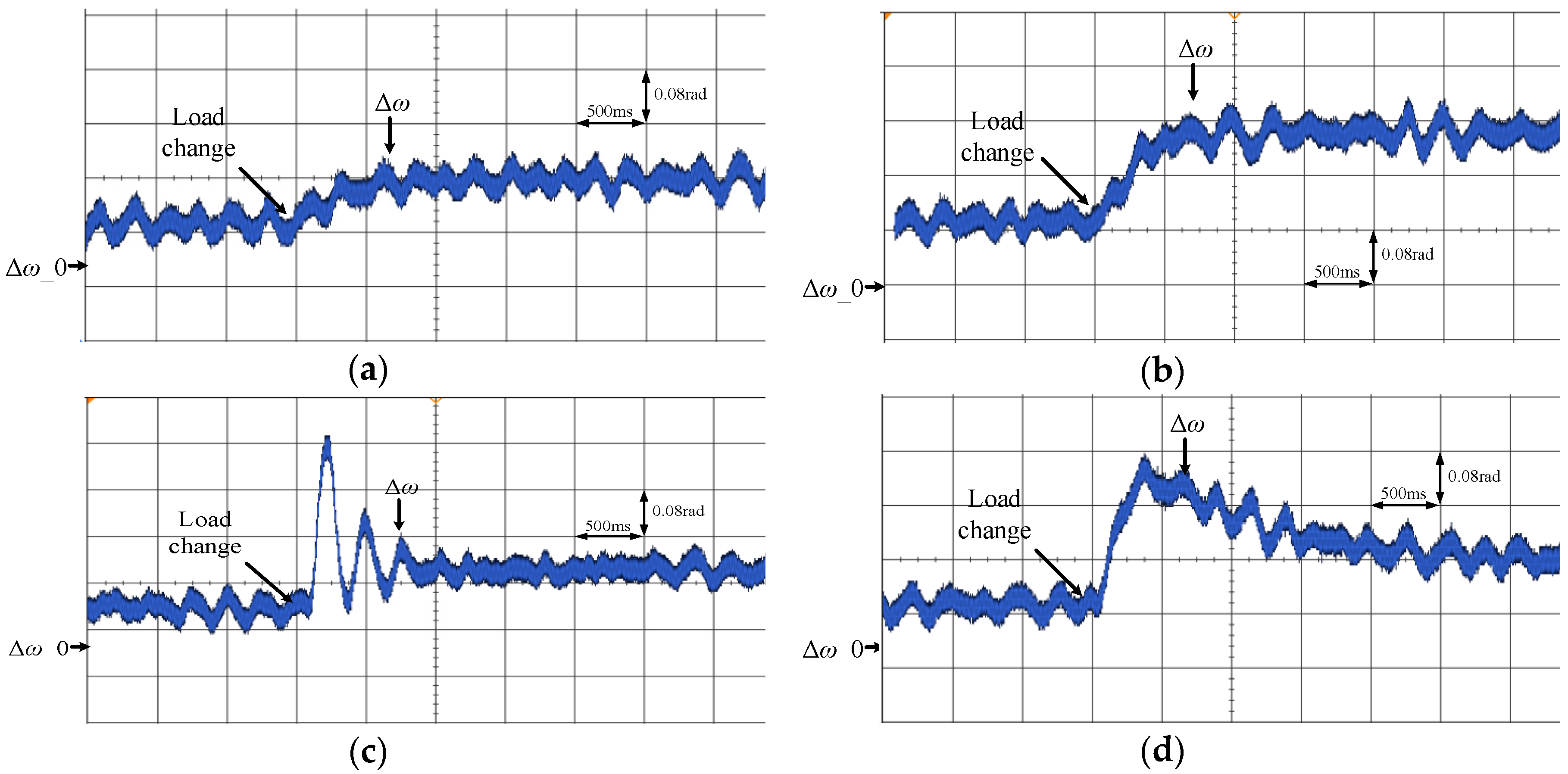
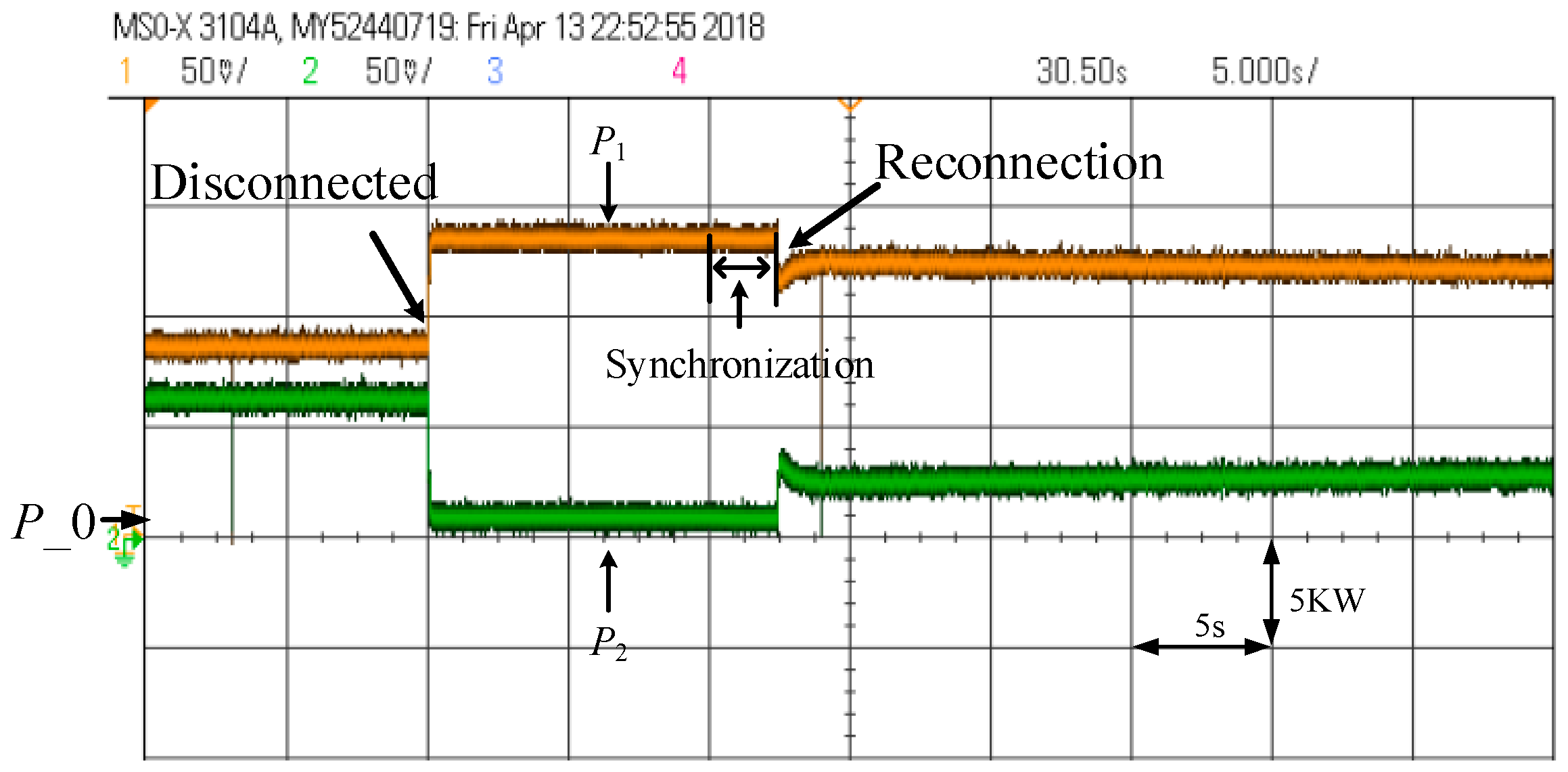
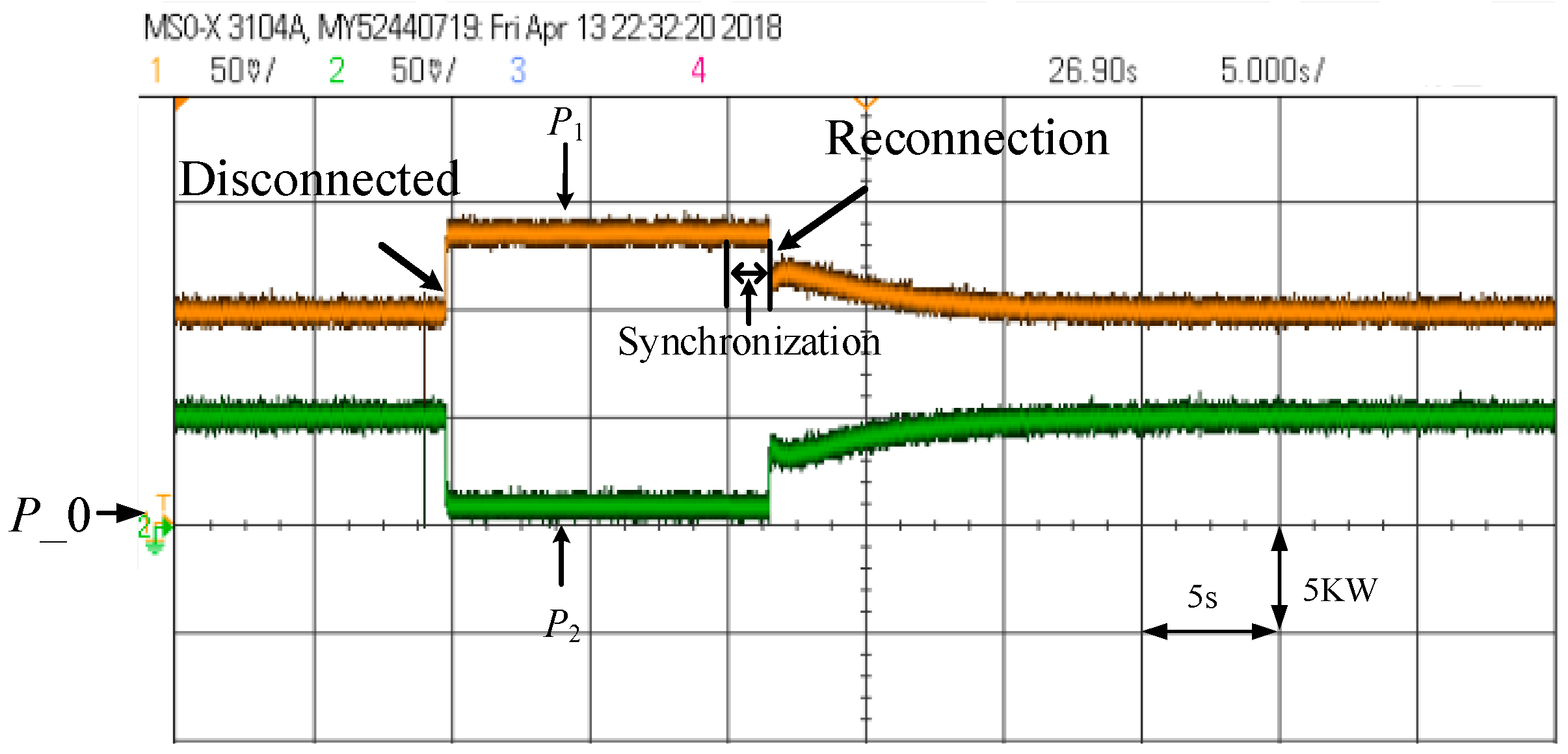
6.1. Performance Comparison with the Conventional Droop Controller
6.2. Performance Comparison with the Washout Filter Controller
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Hossain, A.M.; Pota, R.H.; Issa, W.; Hossain, J.M. Overview of AC Microgrid Controls with Inverter-Interfaced Generations. Energies 2017, 10, 1300. [Google Scholar] [CrossRef]
- Li, D.; Zhao, B.; Wu, Z.; Zhang, X.; Zhang, L. An Improved Droop Control Strategy for Low-Voltage Microgrids Based on Distributed Secondary Power Optimization Control. Energies 2017, 10, 1347. [Google Scholar] [CrossRef]
- Dou, C.; Zhang, Z.; Yue, D.; Gao, H. An Improved Droop Control Strategy Based on Changeable Reference in Low-Voltage Microgrids. Energies 2017, 10, 1080. [Google Scholar] [CrossRef]
- Zhang, H.; Kim, S.; Sun, Q.; Zhou, J. Distributed Adaptive Virtual Impedance Control for Accurate Reactive Power Sharing Based on Consensus Control in Microgrids. IEEE Trans. Smart Grid 2016. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I.; El-Saadany, E.F. Adaptive Decentralized Droop Controller to Preserve Power Sharing Stability of Paralleled Inverters in Distributed Generation Microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Kim, J.; Guerrero, J.M.; Rodriguez, P.; Teodorescu, R.; Nam, K. Mode Adaptive Droop Control With Virtual Output Impedances for an Inverter-Based Flexible AC Microgrid. IEEE Trans. Power Electron. 2011, 26, 689–701. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; Radwan, A.A. Hierarchical Control System for Robust Microgrid Operation and Seamless Mode Transfer in Active Distribution Systems. IEEE Trans. Smart Grid 2011, 2, 352–362. [Google Scholar] [CrossRef]
- Chen, J.; Wang, L.; Diao, L.; Du, H.; Liu, Z. Distributed Auxiliary Inverter of Urban Rail Train—Load Sharing Control Strategy under Complicated Operation Condition. IEEE Trans. Power Electron. 2016, 31, 2518–2529. [Google Scholar] [CrossRef]
- Xia, Y.; Peng, Y.; Wei, W. Triple droop control method for ac microgrids. IET Power Electron. 2017, 10, 1705–1713. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Washout Filter-Based Power Sharing. IEEE Trans. Smart Grid 2015. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Xu, L.; Zhao, X.; Guerrero, J. Analysis of Washout Filter-Based Power Sharing Strategy—An Equivalent Secondary Controller for Islanded Microgrid without LBC Lines. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, T.C. Dynamic Stability of a Microgrid with an Active Load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An Accurate Small-Signal Model of Inverter- Dominated Islanded Microgrids Using $dq$ Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. Reduced-Order Small-Signal Model of Microgrid Systems. IEEE Trans. Sustain. Energy 2015, 6, 1292–1305. [Google Scholar] [CrossRef]
- Leitner, S.; Yazdanian, M.; Mehrizi-Sani, A.; Muetze, A. Small-Signal Stability Analysis of an Inverter-Based Microgrid with Internal Model–Based Controllers. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Yu, K.; Ai, Q.; Wang, S.; Ni, J.; Lv, T. Analysis and Optimization of Droop Controller for Microgrid System Based on Small-Signal Dynamic Model. IEEE Trans. Smart Grid 2015. [Google Scholar] [CrossRef]
- Mohammadi, F.D.; Keshtkar, H.; Feliachi, A. State Space Modeling, Analysis and Distributed Secondary Frequency Control of Isolated Microgrids. IEEE Trans. Energy Convers. 2017. [Google Scholar] [CrossRef]
- Peng, Y.; Shuai, Z.; Shen, J.; Wang, J.; Tu, C.; Cheng, Y. Reduced order modeling method of inverter-based microgrid for stability analysis. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 3470–3474. [Google Scholar]
- Egwebe, A.M.; Fazeli, M.; Igic, P.; Holland, P.M. Implementation and Stability Study of Dynamic Droop in Islanded Microgrids. IEEE Trans. Energy Convers. 2016, 31, 821–832. [Google Scholar] [CrossRef]
- Rosenbrock, H.H. Structural properties of linear dynamical systems. Int. J. Control 2007, 20, 191–202. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Reactive Power Sharing in Islanded Microgrids Using Adaptive Voltage Droop Control. IEEE Trans. Smart Grid 2015, 6, 3052–3060. [Google Scholar] [CrossRef]
- Zhou, J.; Kim, S.; Zhang, H.; Sun, Q.; Han, R. Consensus-based Distributed Control for Accurate Reactive, Harmonic and Imbalance Power Sharing in Microgrids. IEEE Trans. Smart Grid 2016. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Nguyen, C.-K.; Nguyen, T.-T.; Yoo, H.-J.; Kim, H.-M. Improving Transient Response of Power Converter in a Stand-Alone Microgrid Using Virtual Synchronous Generator. Energies 2018, 11, 27. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Hang, L.; Uceda, J. Control of Distributed Uninterruptible Power Supply Systems. IEEE Trans. Ind. Electron. 2008, 55, 2845–2859. [Google Scholar] [CrossRef]
- Sun, Y.; Hou, X.; Yang, J.; Han, H.; Su, M.; Guerrero, J.M. New Perspectives on Droop Control in AC Microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5741–5745. [Google Scholar] [CrossRef]
- Lewis, F.L. A survey of linear singular systems. Circuits Syst. Signal Process. 1986, 5, 3–36. [Google Scholar] [CrossRef]
- Milano, F.; Dassios, I. Primal and Dual Generalized Eigenvalue Problems for Power Systems Small-Signal Stability Analysis. IEEE Trans. Power Syst. 2017, 32, 4626–4635. [Google Scholar] [CrossRef]
- Cai, H.; Xiang, J.; Wei, W.; Chen, M.Z.Q. V-dp/dv Droop Control for PV Sources in DC Microgrids. IEEE Trans. Power Electron. 2017. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 800 V | 5 kHz | ||
| 380 V (line-line) | |||
| 0.1 Ω | |||
| 0.001 | 1 mH | ||
| 20 π rad/s | 800 μF | ||
| 60 π rad/s | 0.03 Ω | ||
| 40 π rad/s | 0.3 mH | ||
| 0.1 | 50 Hz | ||
| 150 | 0.12 Ω | ||
| 0.002 | 1.2 mH | ||
| 10 Ω | 0.08 Ω | ||
| 5 mH | 0.8 mH |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| (10.0 309.5) | (0 0) | ||
| (20.0 10.1) | (−1.2 −4.2) | ||
| (20.0 10.1) | (76.6 73.2) | ||
| (309.6 309.2 307.5) | (29.6 27.6 23.9) | ||
| (20.0 10.1) | (−0.81 −3.4) | ||
| (−0.2 0) | (30.3 −2.6) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Wei, W. Improved Droop Control with Washout Filter. Energies 2018, 11, 2415. https://doi.org/10.3390/en11092415
Hu Y, Wei W. Improved Droop Control with Washout Filter. Energies. 2018; 11(9):2415. https://doi.org/10.3390/en11092415
Chicago/Turabian StyleHu, Yalong, and Wei Wei. 2018. "Improved Droop Control with Washout Filter" Energies 11, no. 9: 2415. https://doi.org/10.3390/en11092415
APA StyleHu, Y., & Wei, W. (2018). Improved Droop Control with Washout Filter. Energies, 11(9), 2415. https://doi.org/10.3390/en11092415