4.1. Decomposition and Reconstruction of Fault Current and Vibration Signals
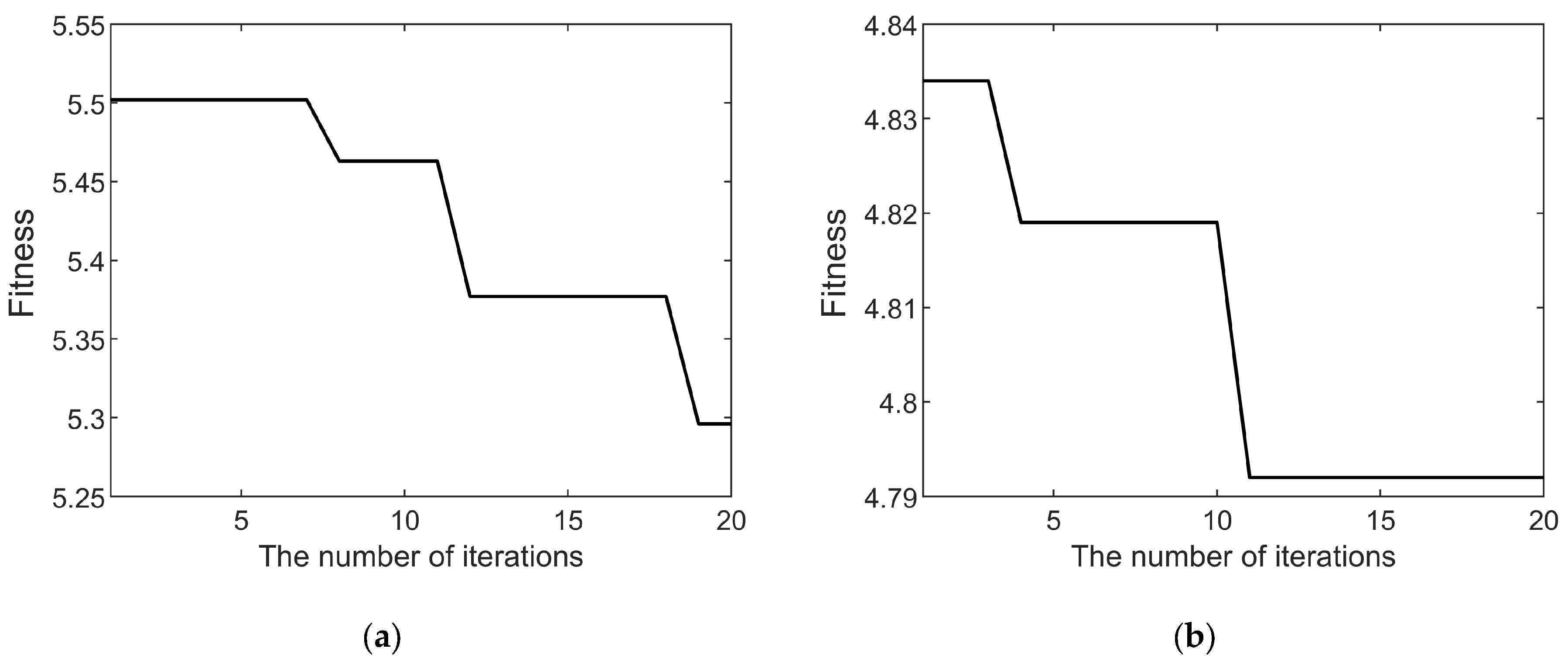
To demonstrate the global search capability and rapid convergence of the HO algorithm when used for optimizing VMD decomposition parameters, both the widely used PSO algorithm and the HO algorithm were employed to iteratively optimize the parameter combinations (
K,
α) for the decomposition of the fault current and vibration signals. The variation in the fitness values during the iterative processes of the PSO and HO algorithms are illustrated in
Figure 6 and
Figure 7, respectively. As the number of iterations increases, the fitness values gradually decrease and eventually converge. A constant fitness value indicates that the optimization algorithm has identified the optimal decomposition parameters for the corresponding signal.
A comparison between
Figure 6 and
Figure 7 clearly demonstrates that the HO algorithm achieves a significantly faster convergence rate than the PSO algorithm in VMD parameter optimization. Furthermore, the final converged fitness value for the vibration signal is 4.792 with the PSO algorithm and 4.789 with the HO algorithm, indicating that the HO algorithm achieves a superior decomposition effect for the fault vibration signal. This result suggests that the PSO algorithm becomes trapped in a local optimum and fails to identify the global optimal decomposition parameters, whereas the HO algorithm successfully obtains the global optimum. Specifically, with the HO algorithm, the fitness value for the fault current signal converges to 5.296, and that for the vibration signal converges to 4.789. The corresponding optimal parameters obtained by the HO algorithm are
K = 6 and
α = 1200 for the current signal and
K = 7 and
α = 800 for the vibration signal.
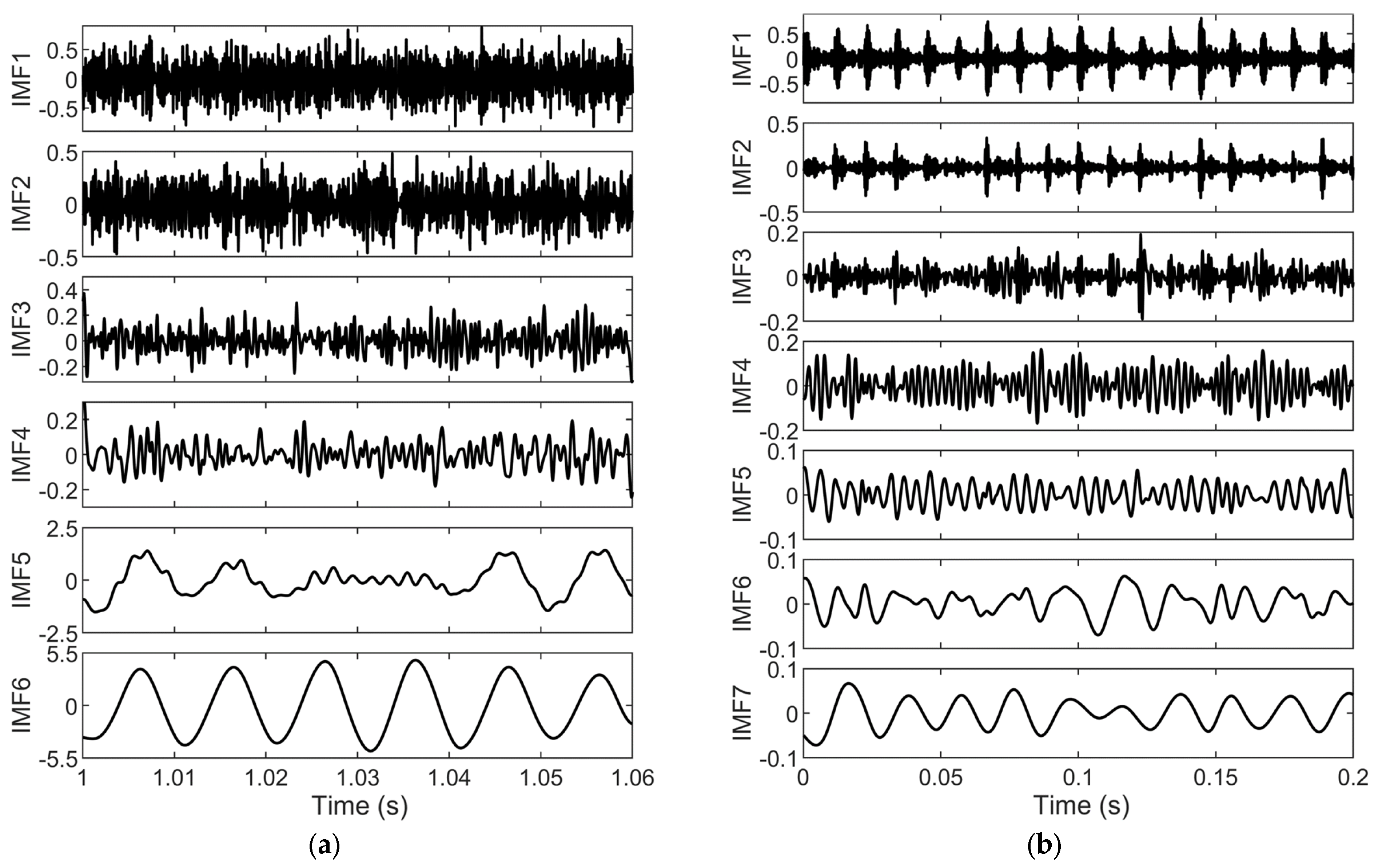
As shown in
Figure 8, both the fault current and vibration signals are decomposed through VMD into several IMFs covering different frequency bands. For the fault current signal, the decomposed IMF6 has a period of approximately 0.01 s and an amplitude similar to that of the original signal, indicating that this component primarily reflects the fundamental frequency component of the fault current. The other IMFs contain information related to the inherent eccentric frequencies, bearing ORF characteristics, and environmental noise. For the vibration signal, the decomposition results show that the first three IMFs have fluctuation periods similar to those of the original vibration signal and mainly capture its principal frequency features, while the remaining components primarily reflect the noise and harmonic content.
The kurtosis of each IMF obtained from the decomposition of the fault current and vibration signals is calculated, as shown in
Table 5. The analysis reveals that the kurtosis of the IMFs from the current signal is generally lower than that of the vibration signal. Moreover, the first two IMFs of the vibration signal exhibit a significantly higher kurtosis than the baseline value of 3 for normally distributed signals, indicating that the vibration signal contains more impulsive components and is more sensitive to bearing faults. Therefore, vibration features are assigned higher weights than current features in the subsequent information fusion process.
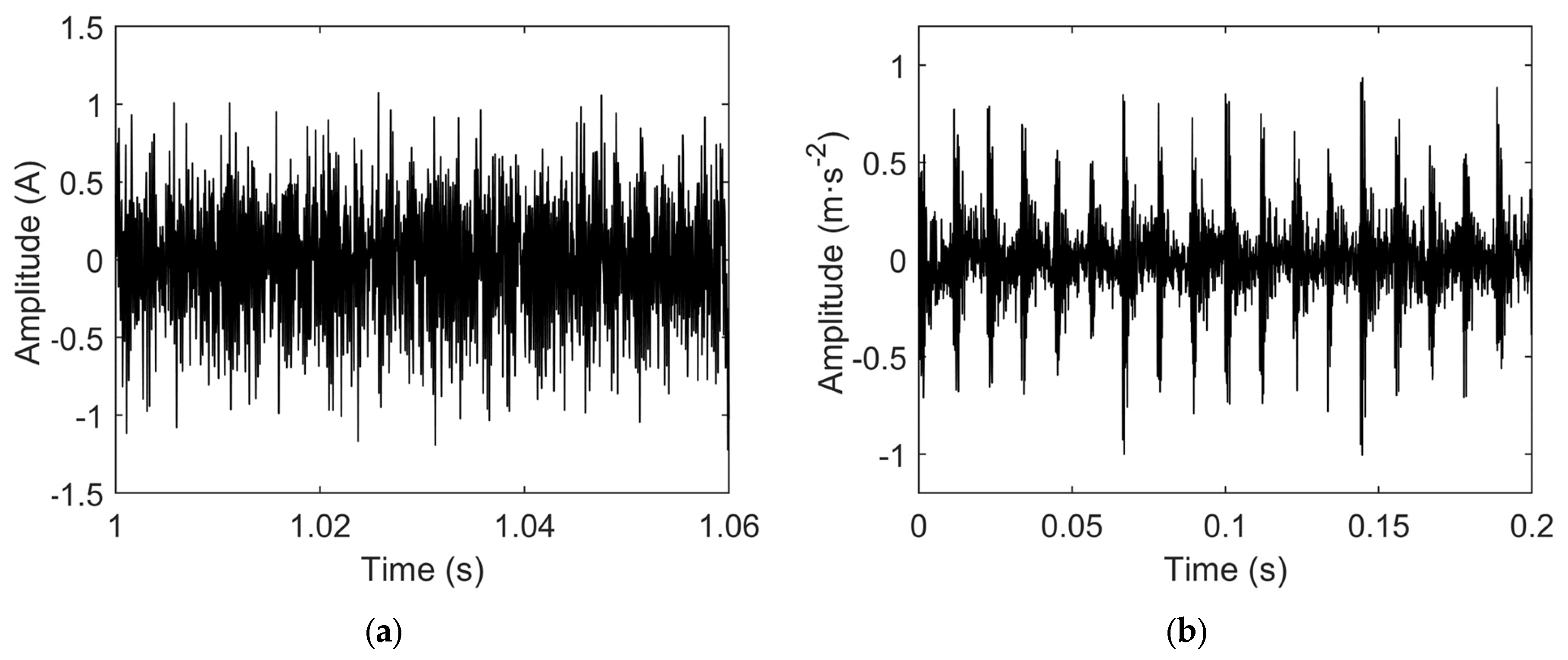
To further suppress the impact of environmental noise and the interference of the fundamental frequency of the current on the characteristic fault frequency of the bearing and to highlight key fault features for early fault diagnosis, a kurtosis-based selection method is adopted: IMFs with a kurtosis greater than 2.5 are selected from the current signal while those with a kurtosis greater than 3 are selected from the vibration signal for signal reconstruction. The reconstruction results are shown in
Figure 9.
As shown in
Figure 9, the time-domain waveform of the reconstructed current signal differs markedly from that of the original fault current signal. This difference arises mainly because the IMF6 component, which contains the fundamental frequency, is excluded during the IMF selection process. This exclusion effectively suppresses the effect of interference from the fundamental frequency on the fault characteristic frequency. Conversely, the vibration signal is more sensitive to bearing faults, with its original waveform clearly influenced by fault-induced fluctuations. After kurtosis-based selection, the reconstructed vibration signal effectively retains the characteristic frequency components associated with the bearing fault. Meanwhile, the environmental noise is significantly reduced. Consequently, the time-domain waveform of the reconstructed vibration signal closely resembles that of the original signal.
4.2. Multi-Source Feature Information Fusion and Early Bearing Fault Diagnosis
Since the time-domain waveform of the fault signal contains limited fault feature information, it is difficult to accurately determine the existence of bearing faults using only time-domain analysis, whether from current or vibration signals. Therefore, spectral analysis is necessary to extract key characteristic components. As a commonly used demodulation method, the Hilbert transform can effectively highlight the fault features in the spectrum.
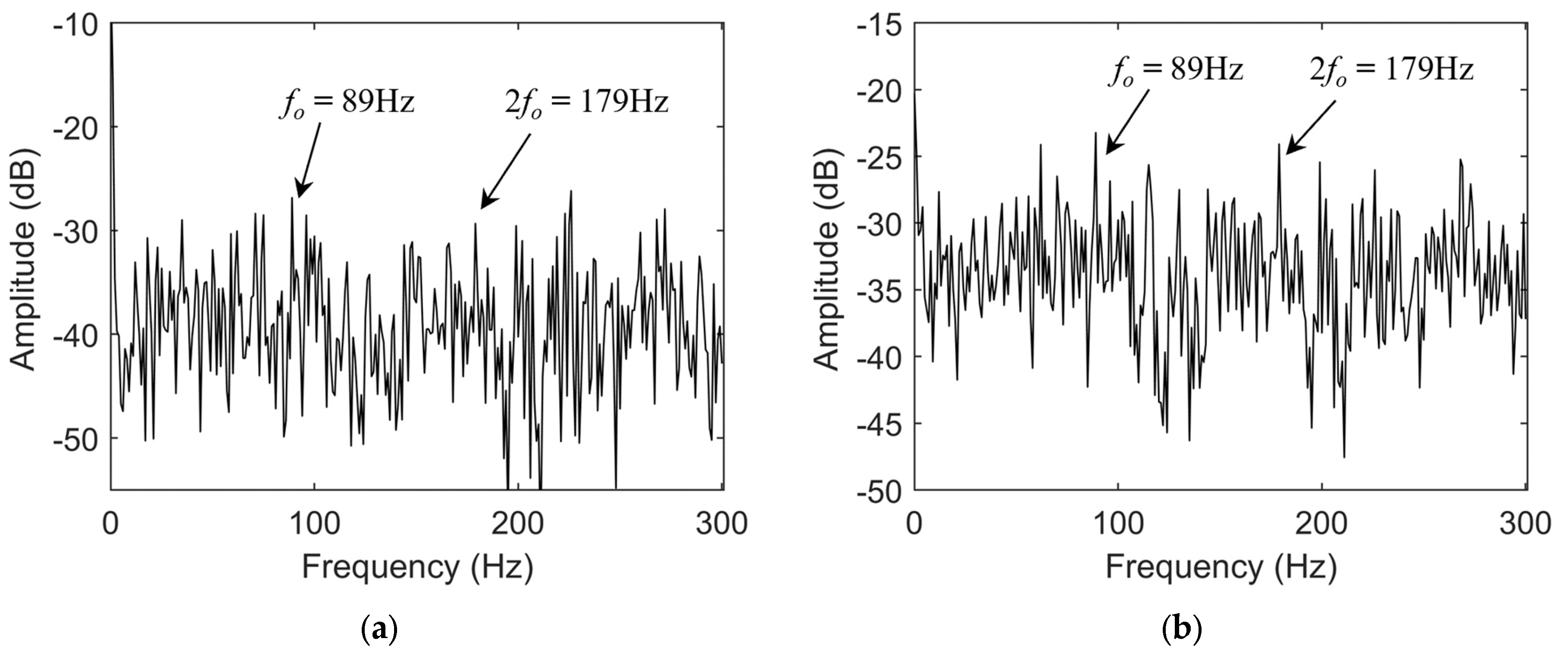
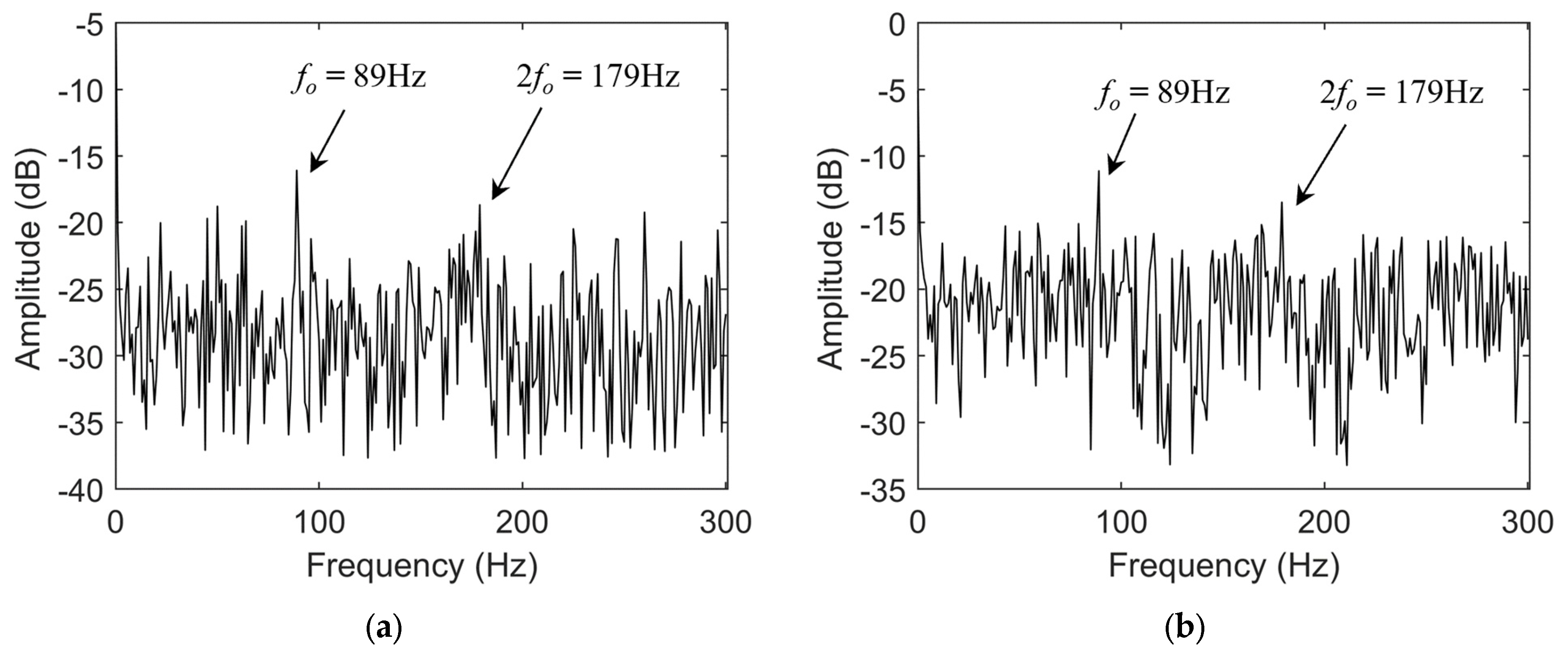
Figure 10 presents the Hilbert envelope spectra of the reconstructed current and vibration signals, where the arrows indicate the characteristic fault frequency of the bearing outer race and its second harmonic. The Hilbert transform demodulates the modulated fault components in the current signal, so the envelope spectrum exhibits the fault characteristic frequency.
As shown in the figure, the amplitude of the fault characteristic frequency in the envelope spectrum of the reconstructed current signal is relatively low and susceptible to environmental noise, making it difficult to accurately assess the bearing’s health status. In contrast, the fault characteristic frequency in the envelope spectrum of the reconstructed vibration signal is more prominent; however, its amplitude remains limited, making it challenging to achieve highly sensitive identification of early bearing faults. To further enhance the instantaneous characteristic frequencies in the fault signals, this study employs the TKEO, which is sensitive to weak impulsive components, to demodulate the reconstructed signals.
Figure 11 shows the energy spectra of the fault signals processed using the TKEO.
Compared with the Hilbert envelope spectrum, the overall amplitude of the TKEO energy spectrum is noticeably increased, which is attributed to the energy enhancement characteristic of the demodulation method. In the TKEO energy spectrum of the reconstructed current signal, the amplitude of the fault characteristic frequency is clearly higher than that of the environmental noise, which facilitates accurate diagnosis of early bearing faults. Similarly, the TKEO energy spectrum of the vibration signal exhibits even more prominent fault feature amplitudes, further validating the effectiveness of the TKEO energy spectrum in early bearing fault diagnosis.
To demonstrate the superiority of the TKEO energy spectrum in extracting frequency-domain features from bearing fault signals, this paper calculates the FNR characteristic index for both the fault current and vibration signals in the Hilbert envelope spectrum and the TKEO energy spectrum, respectively, according to Equation (27). The calculation results are presented in
Table 6. It can be observed from
Table 6 that the FNR of the TKEO energy spectrum is significantly higher than that of the Hilbert envelope spectrum, demonstrating that the TKEO energy spectrum more prominently reveals fault characteristics and is advantageous for early bearing fault feature extraction.
It should be noted that although the TKEO energy spectrum can effectively enhance the fault features and thereby improve the fault identification accuracy, relying solely on the frequency amplitude exceeding the noise levels or using a single FNR value as the basis for fault diagnosis still has certain limitations. This is particularly the case in environments with significant noise interference or when the fault features are inherently weak, as the diagnostic results obtained from a single-signal source often lack stability and are highly dependent on expert experience. To further improve the accuracy of early bearing fault diagnosis, this paper proposes a diagnostic method based on multi-source feature information fusion. Numerous studies have shown that the time-domain kurtosis is an effective feature indicator for distinguishing bearing states; however, relying exclusively on time-domain features makes it challenging to achieve high diagnostic accuracy. In light of this, the proposed method selects the FNR as the frequency-domain feature indicator and kurtosis as the time-domain feature indicator, fusing information from both the fault current and vibration signals. Based on the DST, multi-source information fusion is implemented to enable accurate identification of bearing states.
To further enhance the diagnostic robustness and accuracy, weighting coefficients are assigned to each feature information source based on their prior reliability. The extracted kurtosis and FNR features of both the current and vibration signals are then fused using the WMDST, which effectively avoids the failure of the TDST in highly conflicting cases. The calculated fault signal feature values are as follows: the current kurtosis
qc = 2.664, the current feature noise ratio FNR
c = 3.911; the vibration kurtosis
qv = 4.679; and the vibration feature noise ratio FNR
v = 3.446. Using Equation (19) and the standard feature values in
Table 3, the BPA functions are computed, as shown in
Table 7. The results indicate that, in the case of early and minor bearing faults, accurate fault diagnosis cannot be achieved by relying solely on the fault features of the current signal.
The calculated BPA functions are fused using both the TDST and the WMDST proposed in this paper. The fusion results show that using the TDST yields mT = {0.157,0.842,0.001}, while using the WMDST yields mW = {0.646,0.353,0.001}. These results indicate that, when there is a conflict among multi-source information, the TDST is significantly influenced by the evidence source mCK, which alone classifies the experimental bearing as having an “uncertain” state. As a result, the TDST ultimately diagnoses the bearing state as “uncertain”, which does not correspond to its actual state.
In contrast, the WMDST, through the use of weight allocation and conflict management mechanisms, provides a fusion result that accurately identifies the experimental bearing as being in the “fault” state, consistent with its real condition. However, validation experiments show that relying solely on the numerical values of the fused probability assignment function may still not guarantee completely accurate identification of the actual bearing state. To further improve the accuracy and reliability of the diagnosis, a second decision rule is introduced in this paper: and , where η is set to 0.35 based on multiple experimental trials. Using this rule, when the BPA functions are fused using the WMDST without prior weighting adjustment, the results still fail to accurately identify the bearing as being in the “fault” category.
Since different fault feature information sources exhibit varying sensitivities to bearing faults, applying uniform weighting for evidence fusion is inappropriate. Such an approach can amplify the influence of conflicting information during fusion, resulting in reduced reliability and potentially causing misclassification of the actual bearing state. Therefore, in this study, weighting coefficients are assigned to each feature information source according to its prior reliability. The BPA functions presented in
Table 7 are adjusted based on Equations (24) and (25), and the adjusted results are summarized in
Table 8. Because the current time-domain features are less sensitive to bearing faults, they are assigned lower weighting coefficients. In contrast, information sources with higher reliability exert a stronger influence on the fusion results. After weighting adjustment, the BPA functions more accurately represent the actual bearing condition.
Subsequently, both the TDST and the WMDST are applied to fuse the adjusted BPA functions. The results show that using the TDST yields = {0.933,0.038,0.029}, while using the WMDST yields = {0.957,0.043,0.000}. It can be seen that after weighting adjustment, both evidence fusion methods can reliably and accurately identify early bearing faults, primarily because the conflicts among the feature information sources have been effectively reduced. A further comparison reveals that, compared with the TDST, the WMDST tends to more strongly indicate the presence of a fault, demonstrating higher diagnostic accuracy for early bearing fault identification.
4.3. Comparative Ablation Experiments on Early Bearing ORF Diagnosis
To further validate the effectiveness and accuracy of the proposed HO-VMD and current–vibration signal weighted evidence fusion method for early bearing fault diagnosis and to highlight its advantages over AI algorithms under limited sample conditions, this study conducted comparative ablation experiments. Specifically, 50 sets of faulty and 50 sets of healthy current–vibration data, acquired via synchronous sampling, were employed as experimental samples. For the AI algorithms, all 100 experimental samples were used for model testing, while an additional 25 sets each of the faulty and healthy samples were used for model training. The control groups included a method considering the vibration signal only, a method considering the current signal only, the TDST method, WaveCAResNet [
4], AlexNet [
38], and ConvNeXt-T [
39].
Experiments using a single information source were designed to verify the advantages of the multi-source information fusion method in early bearing fault diagnosis. In these experiments, the reliability weights of the kurtosis and FNR indicators were kept consistent with those used in the multi-source information fusion experiments. The TDST method was included to demonstrate the superiority of the proposed WMDST method in managing conflicting information. WaveCAResNet represented recent advancements in multi-source information fusion diagnosis using AI algorithms. AlexNet was used to illustrate the diagnostic performance of lightweight convolutional neural networks, while ConvNeXt-T represented diagnostic models based on the Transformer architecture. The accuracy, precision, and recall of these seven bearing fault diagnosis methods were compared, and the calculation formulas were as follows:
where
TP denotes the number of samples where the true category was positive and correctly predicted by the model,
TN denotes the number of samples where the true category was negative and correctly predicted by the model,
FP denotes the number of samples where the true category was negative but incorrectly predicted by the model to be positive, and
FN denotes the number of samples where the true category was positive but incorrectly predicted by the model to be negative. The experimental results are shown in
Table 9.
Based on the comparative experimental results presented in
Table 9, it is evident that using different diagnostic methods resulted in significant variations in key performance metrics, including the accuracy, precision, and recall. The diagnostic approach proposed in this paper consistently demonstrated outstanding performance across all three metrics, achieving an accuracy of 99.0%, a precision of 98.04%, and a recall rate of 100.0%. These results clearly underscore the advantages of WMDST-based multi-source information fusion in early bearing fault diagnosis.
In contrast, when weighted fusion was only applied to a single signal source, all the evaluation metrics decreased to varying extents. Notably, the method relying solely on the current signals exhibited the lowest performance, with the accuracy and precision decreasing to 76.0% and 74.07%, respectively. This decline was primarily due to the significant attenuation of the fault features in current signals during transmission, making early bearing faults more challenging to detect.
Although TDST-based multi-source information fusion was slightly less effective than that based on the WMDST, its overall accuracy remained high. This further demonstrates the effectiveness of the proposed method in resolving conflicting information and optimally allocating fusion weights.
For AI algorithms such as WaveCAResNet, AlexNet, and ConvNeXt-T, all three evaluation metrics remained below 90%, which was notably inferior to the results achieved using the method proposed in this study. This disparity was primarily due to the limited number of training samples in this experiment, which constrained the generalization ability and diagnostic accuracy of the AI-based methods. These findings indicate that, under small-sample conditions, deep learning and other AI approaches exhibit inherent limitations in early bearing fault detection.
In summary, the early bearing fault diagnosis method proposed in this paper—based on HO-VMD and weighted evidence fusion of current and vibration signals—achieves substantial improvements in the accuracy, precision, and recall. Its effectiveness and superiority have been further validated under small-sample conditions. The results of comparative experiments underscore that, in scenarios with limited data, the multi-source information fusion approach attains higher diagnostic accuracy than both single-signal methods and conventional AI algorithms, thereby providing a reliable technical solution for early bearing fault diagnosis in small-sample environments.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}