1. Introduction
It is widely acknowledged that changes in the rail profile directly impact the safe operation of railways. As a vital means of railway operation and maintenance, rail profile detection is instrumental in understanding the service condition of the rail. Based on this understanding, more effective rail grinding can be carried out [
1,
2,
3]. Rail profile detection refers to the process of comparing the measured rail profile data with the standard rail profile data. This comparison helps to obtain parameters such as vertical wear and side wear of the rail [
4]. Currently, rail profile detection mainly falls into two categories: contact-type detection and non-contact-type detection. Specifically, contact-type detection has disadvantages such as low detection efficiency and high labor costs. This is because it requires probes to be in contact with the rail. In contrast, non-contact-type detection aims to extract rail profile data from the intensity information of the reflected light on the rail surface. The line-structured light profile detection technology is a typical non-contact-type detection technology. The line-structured light rail profile detection technology, based on the triangulation measurement principle enables real-time acquisition of rail profile information. Due to its high speed, high precision, and non-contact nature, it is extensively used for dynamic rail profile detection at home and abroad [
5,
6,
7].
However, influenced by harsh working conditions, the rail will undergo some changes after a period of operation. These changes include increased surface roughness, the presence of foreign matter on the surface, and rust on the rail head and the light stripe area of the rail. These surface changes will affect the energy distribution of the reflected light on the rail surface, leading to abnormal energy distribution. For example, the light stripe area of the rail head has a relatively smooth surface, strong specular reflection ability, and very weak diffuse reflection ability. Most of the incident light energy is distributed near the specular reflection direction. Only a small amount of diffuse reflection light is collected by the camera. The traditional line-structured light rail profile detection technology employs the diffuse reflection light as the measurement signal. The specular reflection light is considered the interference signal to obtain the intensity information of the reflected light on the rail surface. For the smooth light stripe area of the rail, when the traditional light rail profile detection method is used to acquire the light intensity image of the rail profile, the phenomenon of underexposure occurs.
Accurately extracting the center of the light stripe is crucial for ensuring the accuracy of rail profile detection [
8]. Many scholars have conducted extensive research on the innovation and improvement of light stripe center extraction algorithms [
9,
10,
11]. In summary, light stripe center extraction algorithms are mainly divided into geometric center extraction algorithms and energy center extraction algorithms [
12]. Geometric center extraction algorithms are based on edge information, threshold information, or refinement techniques. They are applicable to simple working environments and situations where the requirements for measurement accuracy are not high. As prevailing light stripe center extraction algorithms, energy center extraction algorithms are based on the center-of-gravity, directional template, or maximum point. They are suitable for harsh working conditions, objects with complex shapes, and scenarios where high-precision measurement is required. The underexposed areas of rail profile light stripe images are characterized by weak light stripe energy, low contrast, and low confidence in the light stripe center. In such underexposed areas, even with more accurate light stripe center extraction algorithms like the center-of-gravity algorithm and the Steger algorithm, accurate rail profile information cannot be obtained. Moreover, when the light stripe energy is extremely low, the light stripe cannot be detected. As a result, it gives rise to partial loss of profile data and reduces the accuracy of profile detection [
13,
14,
15,
16]. Although the underexposure problem of the light stripe area can be mitigated to some extent by prolonging the exposure time, it will cause overexposure of light stripes in the normal area of the same image. This, in turn, affects the overall profile detection accuracy.
Traditional imaging technology can only acquire light intensity information. In contrast, the information obtained by polarization imaging detection technology is expanded from three dimensions (light intensity, spectrum, and space) to seven dimensions (light intensity, spectrum, space, polarization degree, polarization angle, polarization ellipticity, and rotation direction). The additional polarization information is often used to improve the imaging quality of the measured object. Many scholars have conducted extensive research on polarization imaging technology. For example, Wolff [
17] developed a polarization imaging system composed of a polarization splitting prism and two CCD cameras to analyze the polarization state of specular reflection light on the object surface. In terms of enhancing contrast, Li [
18] explored the potential of active polarization imaging technology in various underwater applications. He fully utilized the polarization characteristics of the target reflected light. Exponential functions were introduced to reconstruct cross-polarized backscatter images. The proposed method demonstrated an improvement for high-polarization objects under various turbidity conditions. Mo [
19] proposed a method to calculate the polarization characteristics image that can reflect the differences in polarization characteristics of different materials. They fused the multi-angle orthogonal differential polarization characteristics (MODPC) image with the intensity image. The fused polarization image effectively enhanced the object detection information. This provided a basis for object classification, recognition, and segmentation. Umeyama [
20] captured images of the measured object from different polarization angles by rotating the polarizer and separated the specular reflection components from the diffuse reflection components through independent component analysis. Overall, polarization imaging technology has certain advantages in reducing the impact of specular reflection light on the object surface, enhancing contrast, and improving imaging quality. Le Wang et al. [
21] proposed a line-structured light imaging method for rail profiles based on polarization fusion. They proposed obtaining polarization component images and total intensity images of the rail laser section from multiple angles using a polarized camera. They solved the problem of local overexposure of laser images caused by specular reflection on the rail grinding surface through polarization fusion imaging technology. However, they did not discuss the existing problem of local underexposure.
Statistic features of multiple images are effectively extracted based on information complementarity after the image fusion. This compensate for the information insufficiency problems of single images, such as image information interference by noise, and too little image information. The result is more accurate information about the measured object. In consideration of the information correlation and complementarity between polarization images, researchers have proposed a variety of polarization image fusion methods, mainly including the frequency domain image fusion and spatial domain image fusion. In terms of frequency domain image fusion, Zhang Jingjing et al. proposed decomposing an image into low-frequency and high-frequency parts of different scales using the discrete wavelet transform (DWT). The wavelet coefficients of the fusion image are determined based on the wavelet coefficients of the low-frequency and high-frequency images as the statistical features [
22]. Qiao Juan put forward a polarization image fusion algorithm based on the two-dimensional DWT, to enhance image details and improve the visual effect of images [
23]. In terms of spatial domain image fusion, Yin Haining et al. proposed a polarization image fusion method based on feature analysis. Through this method, the fusion weight of an image can be calculated according to its gray feature, texture feature and shape feature. In addition, image fusion is used to solve the problem of detail loss that occurs when the polarization parameter image is calculated [
24]. Recently, some image fusion methods based on deep learning, such as DPFN [
25] and Gan [
26], have become research hotspots. However, they are usually specific to natural scenes with rich color and texture features, while laser stripe data are relatively insufficient and lacks rich texture and color features. Therefore, these methods are not suitable for fusion of laser polarized stripe images.
To solve the above problems, based on previous research results, this paper proposes an improved rail profile measurement method based on polarization imaging. Specifically, a polarized camera is first used to capture the polarization component images of the rail laser section from multiple angles. Then, the polarization information of the rail laser section is extracted, and the Stokes parameter images, linear polarization angle images, and linear polarization degree images are calculated. Based on the S-RANSAC algorithm, the rail profile data corresponding to multiple polarization component images are fused. The fused data are used as the final rail profile measurement result. This method effectively improves the accuracy of rail profile measurement results under complex working conditions.
The structure of this paper is as follows:
Section 2 introduces the traditional rail profile measurement methods and the exposure anomaly problems they face.
Section 3 describes the rail profile measurement model based on polarization fusion. This includes the basic principle of polarization imaging, rail polarization component images, and the polarization data fusion method.
Section 4 presents the experimental results, including laboratory static experiments and field dynamic experiments, and makes comparisons with other methods. Finally,
Section 5 summarizes the conclusion of this paper.
3. The Measurement Principle
3.1. Polarization Imaging
Through polarization optical imaging, multiple intensity images of the measured object in different analyzer directions can be captured. Polarization information of the measured object can also be acquired. In other words, intensity information and polarization information of the measured object can be collected simultaneously. In contrast, traditional imaging technology is mainly used to capture intensity images of the measured object, without polarization information. For convenience, the cameras through which both intensity information and polarization information of the measured object can be acquired are collectively referred to as polarized cameras. Cameras through which only intensity information can be acquired are referred to as unpolarized cameras.
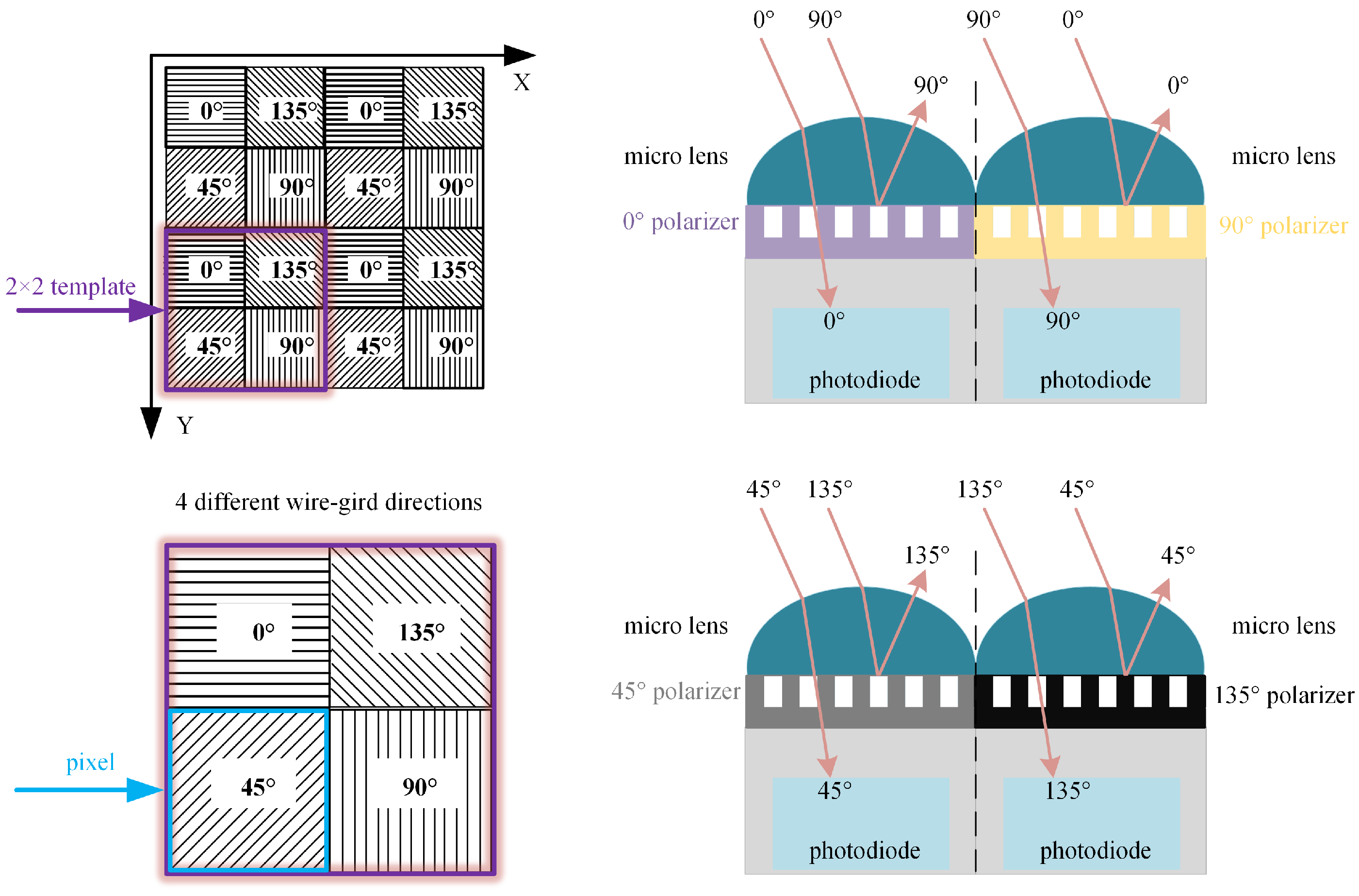
A polarized camera is equipped with four polarization filters in different directions, which can simultaneously capture the polarization component images of the rail laser section from four directions. These images are abbreviated as four-directional polarization component images.
Figure 4 shows the polarization filters and pixel distribution of the polarized camera. The four polarization filters of the polarized camera are arranged in a 2 × 2 configuration. Sub-pixels in the 2 × 2 template correspond to nanowire grating polarization filters at 0 degrees, 135 degrees, 45 degrees, and 90 degrees, respectively. The polarized light whose vibration direction is perpendicular to the nanowire grating will pass through the filter, while the polarized light whose vibration direction is parallel to the nanowire grating will be filtered out. All sub-pixels of the 2 × 2 template in the same polarization direction constitute a polarization component image. The gray values of all the sub-pixels at the same position in the 2 × 2 template are extracted to obtain four polarization component images that are 1/2 of original images in width and height. The four images are marked as
,
,
and
respectively. According to the Stokes representation method of polarized light, total intensity image
is expressed below:
In fact, the total intensity image is an intensity image captured through the traditional method and an ordinary intensity camera. Each pixel in a polarization component image is derived from the same 2 × 2 template. Polarization component images are pixel-aligned. Therefore, the total intensity image, generated by the superposition of polarization component images, is also pixel-aligned with the polarization component images.
According to reference [
16], both the normal area and the overexposed area of the light stripe have partially polarized light with the same polarization angle. The interference part of the overexposed area has a high degree of polarization, while the non-interference part of the overexposed area and the normal area have a relatively low degree of polarization. Therefore, the four polarizers of the polarized camera in the orthogonal transmission direction can be used to filter out the interference components with a higher degree of polarization in the overexposed area. However, because the four-directional polarization component images have the effect of polarization filtering, this method cannot solve the problem of local underexposure of the rail laser section image. In this case, the polarization information of the rail laser section needs to be further extracted.
According to electromagnetic theory, light is defined as a transverse wave, and its electric field direction and magnetic field direction are perpendicular to the direction of propagation. In a plane perpendicular to the direction of light propagation, the electric vector may have different vibration states, which are also known as the polarization states of light. According to the polarization state, light can be further divided into natural light, partially polarized light, and fully polarized light. Fully polarized light is further divided into elliptically polarized light, linearly polarized light, and circularly polarized light. The Stokes vector
can be used to describe the polarization state of any light. The relationships between each component of the Stokes vector and the amplitude components
,
of the light’s electric vector and the phase difference are shown in Equation (5).
where
represents the total intensity of light,
denotes the light intensity difference between the linear polarization component of light wave in the x direction and the linear polarization component in the y direction,
refers to the light intensity difference between the linear polarization component of light wave in the 45 degree direction and the linear polarization component in the 135 degree direction, and
represents the light intensity difference between the left-handed circular polarization component and the right-handed circular polarization component. Natural light is usually partially polarized light, while partially polarized light can be regarded as a combination of fully polarized light and natural light. The first three components of the Stokes vector
can be expressed as follows:
The linear polarization degree
DoLP can represent the proportion of linearly polarized light in the partially polarized light. The linear polarization degree is represented in the Equation (7). The linear polarization angle
AoP is the angle between the long axis of polarization ellipse and the x axis, namely the angle between the strongest vibration direction and the x axis. The expression of
AoP is shown in the Equation (8).
Polarization information of the measured object mainly involves the linear polarization components in various directions, Stokes vector, linear polarization degree DoLP, and linear polarization angle AoP. Through a traditional camera, only the intensity information of the measured object, namely the first component of the Stokes vector, can be acquired. In contrast, a polarized camera based on the polarization imaging technology makes it possible to obtain all the above polarization information. Therefore, rail profile information collected through a polarized camera is much more than that obtained through a traditional camera. Being capable to collect both polarization information and intensity information, a polarized camera is often used to enhance the contrast and reduce the impact of specular reflection light.
3.2. Polarization Component Images of Rail
The same position of the rail shown in
Figure 2 was photographed with a polarized camera, to obtain four polarization component images of the rail laser section, as shown in
Figure 5, the red box represents the same position as the red box in
Figure 2. Then, the Stokes parameter images
,
and
, linear polarization degree image
IDoLP, and linear polarization angle image
IAoP were obtained based on the results of calculation according to the Equations (6), (7) and (8) respectively, as shown in
Figure 6 and
Figure 7. The red box represents the same position as the red box in
Figure 2.
Polarization component images are pixel-aligned. Therefore, the synthesized Stokes parameter image, linear polarization degree image, and linear polarization angle image are also pixel-aligned. These images can reflect the rail profile information to a certain extent. There is a certain information correlation between them. Stokes parameter image
is an intensity image captured through the traditional rail profile measurement method, and is equivalent to that in
Figure 2c. The low gray value of the underexposed area of Stokes parameter image
leads to the low confidence of the light stripe center. In contrast, the corresponding area of the linear polarization degree image is characterized by the strong light stripe energy. It also exhibits high imaging contrast and light stripe center confidence. This shows a certain degree of information complementarity.
The four-directional polarization component image, Stokes parameter image, linear polarization degree image, and linear polarization angle image are pixel-aligned with each other. They are correlated and complementary in rail profile information. Therefore, fusion of the aforesaid images to obtain the rail laser section images on the principle of reducing the fusion weight of the underexposed area and improving the fusion weight of the normal area. This approach can better solve the problem of underexposure of light stripe images captured through the traditional rail profile detection technology.
Based on the above analysis results, this paper proposes a rail profile measurement method based on polarization imaging, as shown in
Figure 8. Specifically, the laser is equipped with a linear polarizer to obtain the linearly polarized light in the laser plane in the vibration direction, and the polarization direction of the laser is shown in the figure. In addition, a polarized camera is used to capture the polarization component images of the rail laser section from multiple polarization angles. Stokes parameter images
,
and
, linear polarization degree image
IDoLP, and linear polarization angle image
IAoP are synthesized from such polarization component images. The aforesaid images are fused through the image fusion algorithm to obtain rail laser section images, which lays a foundation for light stripe center extraction, calibration, profile stitching, profile registration, and final rail profile measurement.
3.3. The Polarization Data Fusion Method
The determination of fusion weights is crucial for improving the quality of multi- polarized light image fusion. Wang [
21] introduced a light stripe reliability evaluation mechanism to determine the fusion weights of source images. For light stripe reliability evaluation, statistical features such as light stripe width, gray value, and average residual sum of squares were used as evaluation indicators. For each source image, the light stripe reliability in each column needed to be calculated. The total pixel intensity or light stripe width was separately selected as an evaluation index to calculate the reliability of stripe polarization imaging, and the weights of each component image were continuously adjusted to achieve the optimal fusion effect. Additionally, these two evaluation indexes could also be used comprehensively to calculate the light stripe reliability and obtain image fusion weights. This method effectively overcomes the problem of rail surface reflection. However, when applied to the dynamic measurement of the profile system, there are still some issues to be resolved:
(1) The fusion strategy and weight calculation lack systematic quantitative analysis, overly depending on qualitative analysis results and artificial experience thresholds.
(2) Light stripes change during train operation, and unpredictable changes may occur due to factors such as rail wear, sunlight, and foreign matter interference. Thus, using the light stripe width and brightness as criteria for determining fusion weights makes it difficult to adapt to the complex and ever-changing conditions of an entire railway line.
(3) The fusion calculation of multiple polarization images is time-consuming, thus affecting the real-time performance of the measurement system.
To solve the above problems, and a data fusion algorithm for segmented RANSAC polarization point cloud is proposed in this paper, as shown in
Figure 9.
The algorithm process is described as follows:
(1) For nine polarization component images represented by , , , , , , , and , solve the light stripe centers to obtain the corresponding polarization profile data, denoted as , , , , , , , and ;
(2) According to point coordinates, merge nine pieces of polarization profile data into one piece of profile data denoted as
where
represents the fusion of profile coordinate data.
(3) Based on the top and gauge points, divide these profiles into five areas denoted as
where
is a region-based segmentation,
is the coordinate of the rail top, and
is the coordinate of the rail gauge point. The division of the five regions incorporates strong prior information about rail shapes. By utilizing the rail top and gauge points, as well as the rail model, the rails can be precisely divided into the rail top region, rail head transition region, rail head side region, rail web region, and rail bottom region according to Formula (10). Each region possesses a relatively fixed curvature, ensuring consistent reflection of light.
(4) Implement the random sample consensus (RANSAC) for each region to obtain the best-fit polynomial equation, denoted as
where
represent the polynomial curves of RANSAC fitting for five segments;
are interior point thresholds, the samples with values less than such thresholds are used for fitting, while other samples with values greater than such thresholds are removed as noise;
represent the times of sampling iterations;
represent the optimal polynomial fitting powers for five segments, which can be obtained by using the least square method on the basis of selecting multiple pieces of typical profile data from actual railway line, and constructing a global optimization model.
(5) Stitch the fitting curves of the five segments into a complete half section profile of steel rail denoted as , where is the optimal profile fitting curve formed after fusion of multiple polarization point cloud data.
5. Conclusions
A novel rail profile measurement method founded on multi-polarization fusion has been presented to resolve the issue of insufficient local exposure in laser cross-section images, which is a common hurdle in traditional rail profile measurement techniques. This advance involves the creation of a profile data fusion algorithm that utilizes the S-RANSAC algorithm, specifically designed for four-directional polarization component images, Stokes parameter images, linear polarization angle images, and linear polarization degree images. This approach effectively alleviates the problem of local underexposure in the laser cross-section of steel rails, securing a comprehensive and accurate depiction of the rail profile. Following three-dimensional reconstruction, the method guarantees that the steel rail no longer suffers from data loss, which is a crucial improvement over traditional methods. This innovation surmounts the exposure insufficiency in key areas of laser cross-section images of steel rails, which can significantly influence the extraction of light strip centers. By preserving the integrity of profile data in critical areas, the method boosts the accuracy and stability of profile detection under complex working conditions. This not only ensures the effectiveness of profile analysis, comparison, and evaluation but also facilitates the expansion of rail profile detection application scenarios.
Future research will probe into alternative image fusion methods, such as frequency-domain fusion or deep-learning-based fusion, with the objective of further enhancing algorithm efficiency and robustness. This could potentially result in more accurate and reliable rail profile measurements, even in the most demanding operating environments. Additionally, efforts will be made to optimize the existing S-RANSAC algorithm to reduce its computational complexity and improve its real-time performance, making it more suitable for practical applications in railway infrastructure inspection. Through these continuous improvements, the proposed method is expected to play an increasingly significant role in ensuring the safety and reliability of railway transportation systems.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}