


3D Galileo Reference Antenna Pattern for Space Service Volume Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
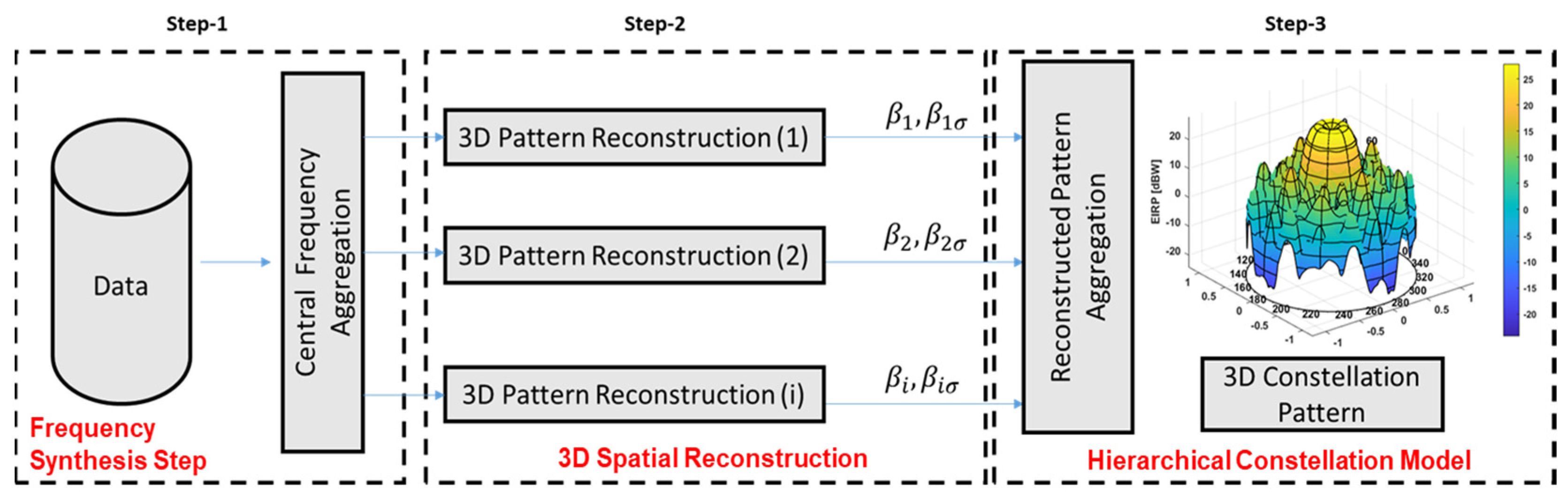
2. Multi-Step 3D Reference Antenna Pattern Reconstruction
- (1)
- Provide to the user a representation of the pattern applicable to target Galileo signals, hence the need to report the measurement at different CW to the Galileo central frequencies.
- (2)
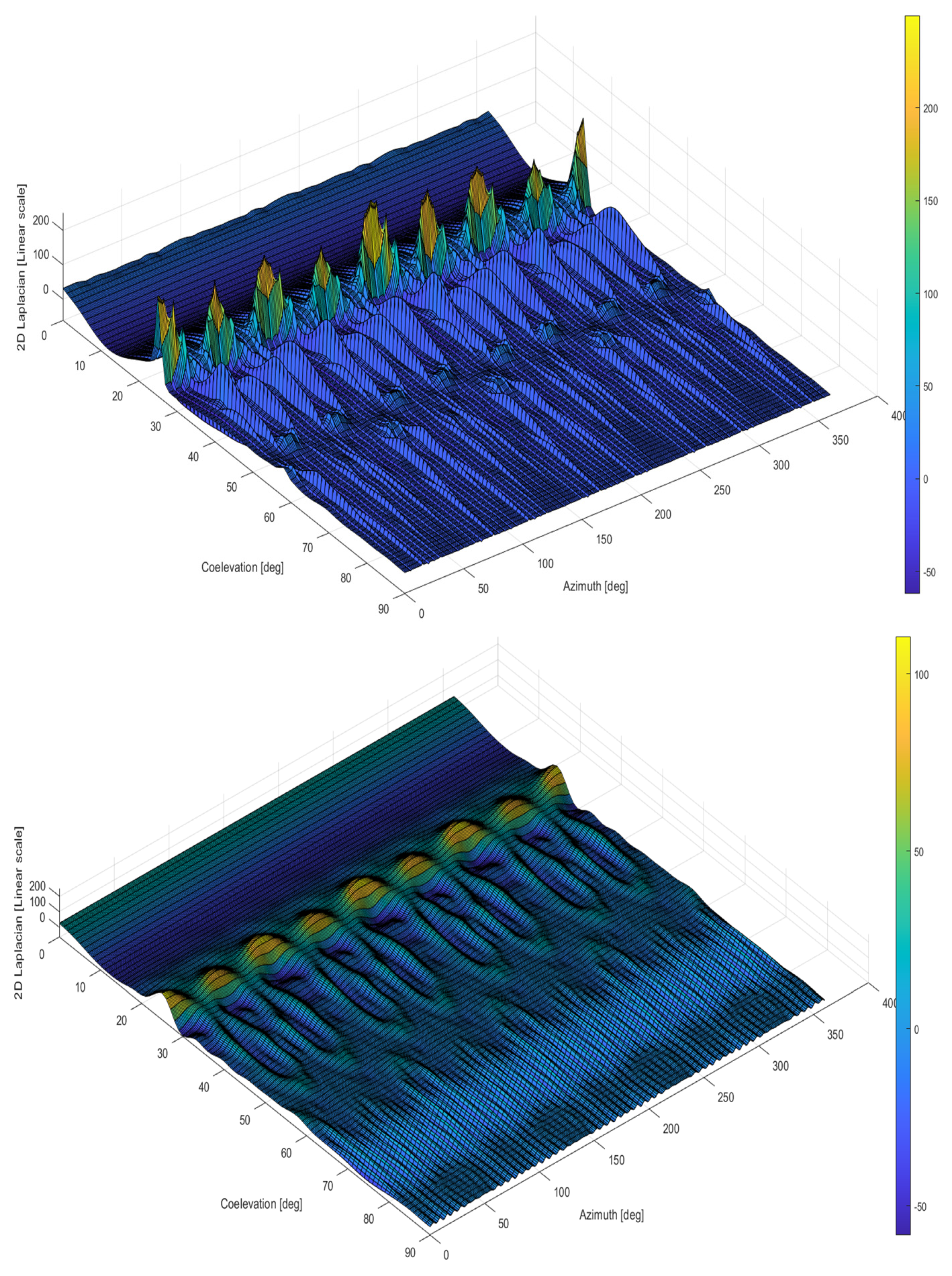
- Overcome the facility sampling limitations and achieve a high-resolution 3D antenna pattern with smooth distribution, filtering out discontinuities and measurement degradation.
- (3)
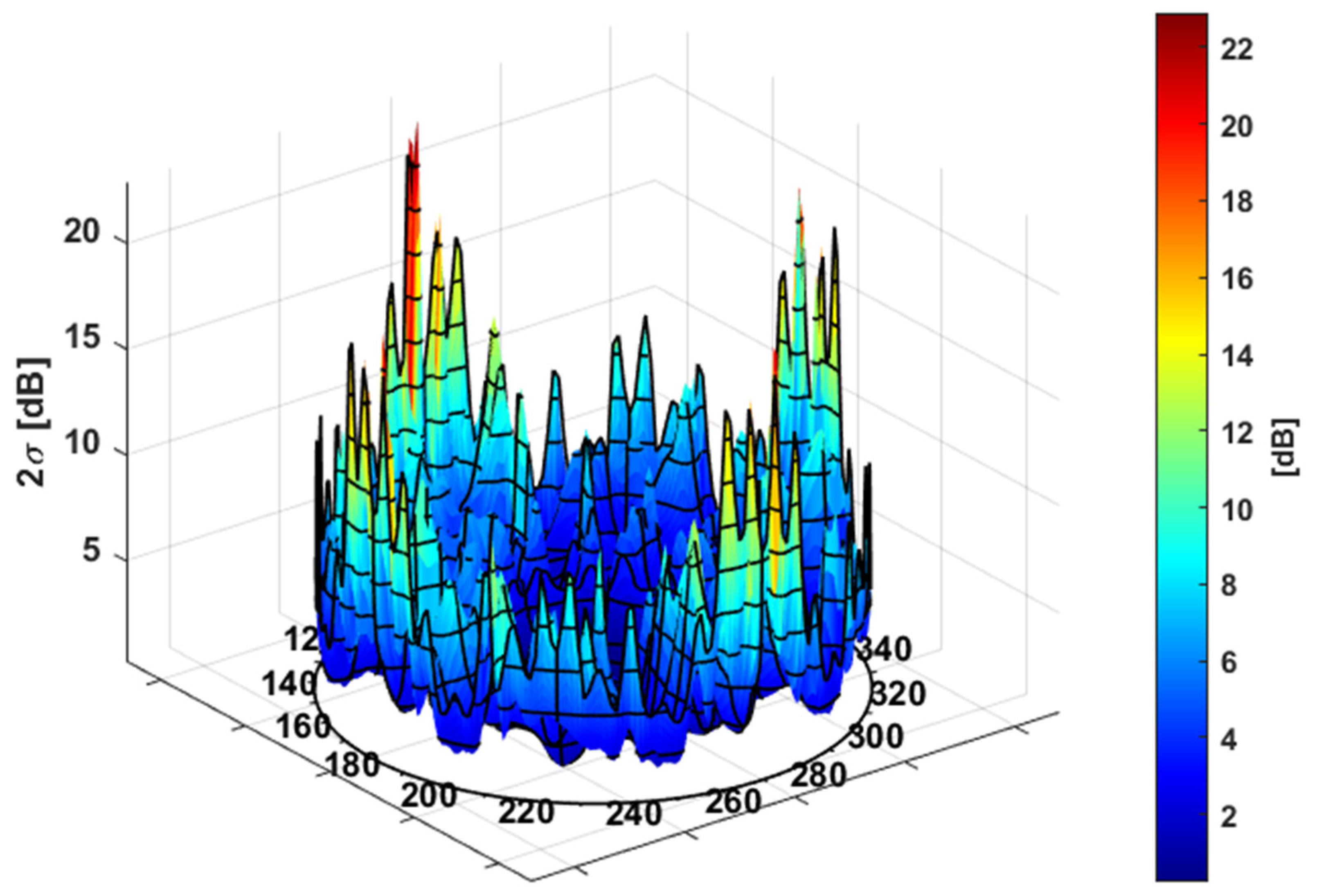
- Handle the uncertainty introduced by different realizations of the same antenna during different SVs testing sessions by using a statistical representation in terms of expected pattern values and bounds.
2.1. Frequency Synthesis Step
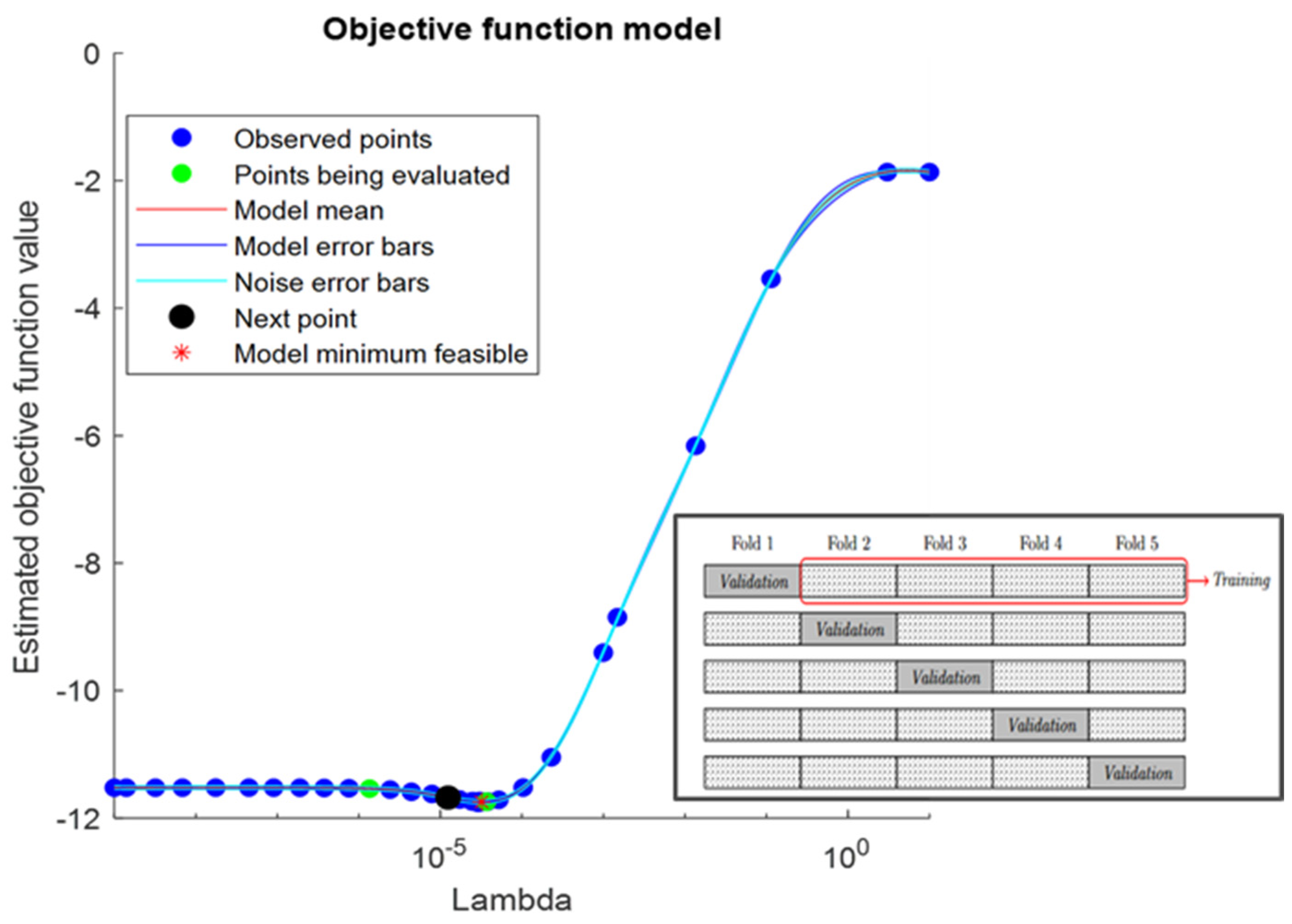
2.2. A 3D Optimal Spherical Harmonic Based Spatial Reconstruction
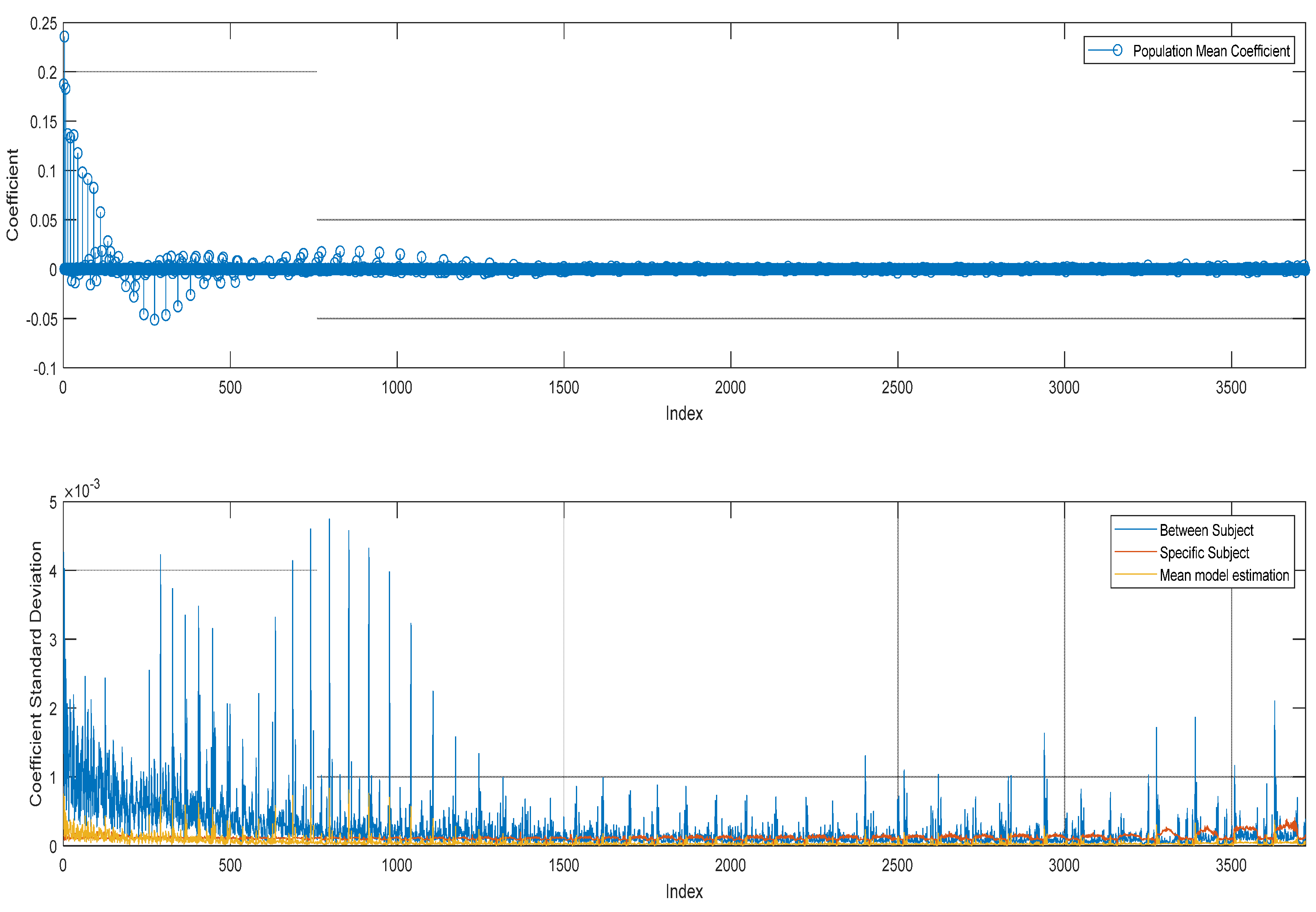
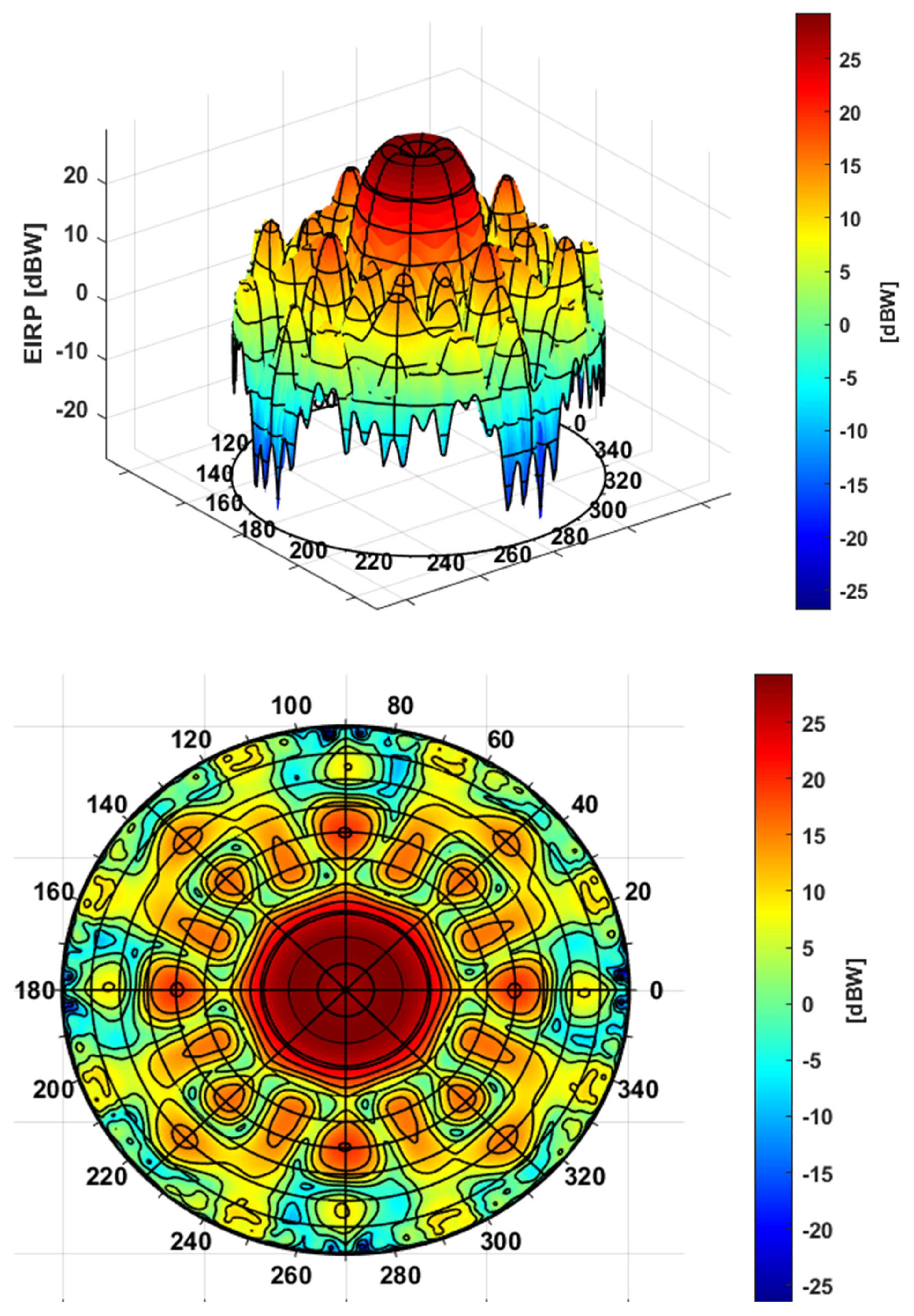
2.3. Hierarchical Constellation Model
- The individual models of the specific antenna pattern .
- The population average model or the constellation pattern .
3. Model Derivation Results
4. Galileo Pattern Driven Space Service Volume Analysis
4.1. SSV Geometrical Model and Accessibility Index Definition
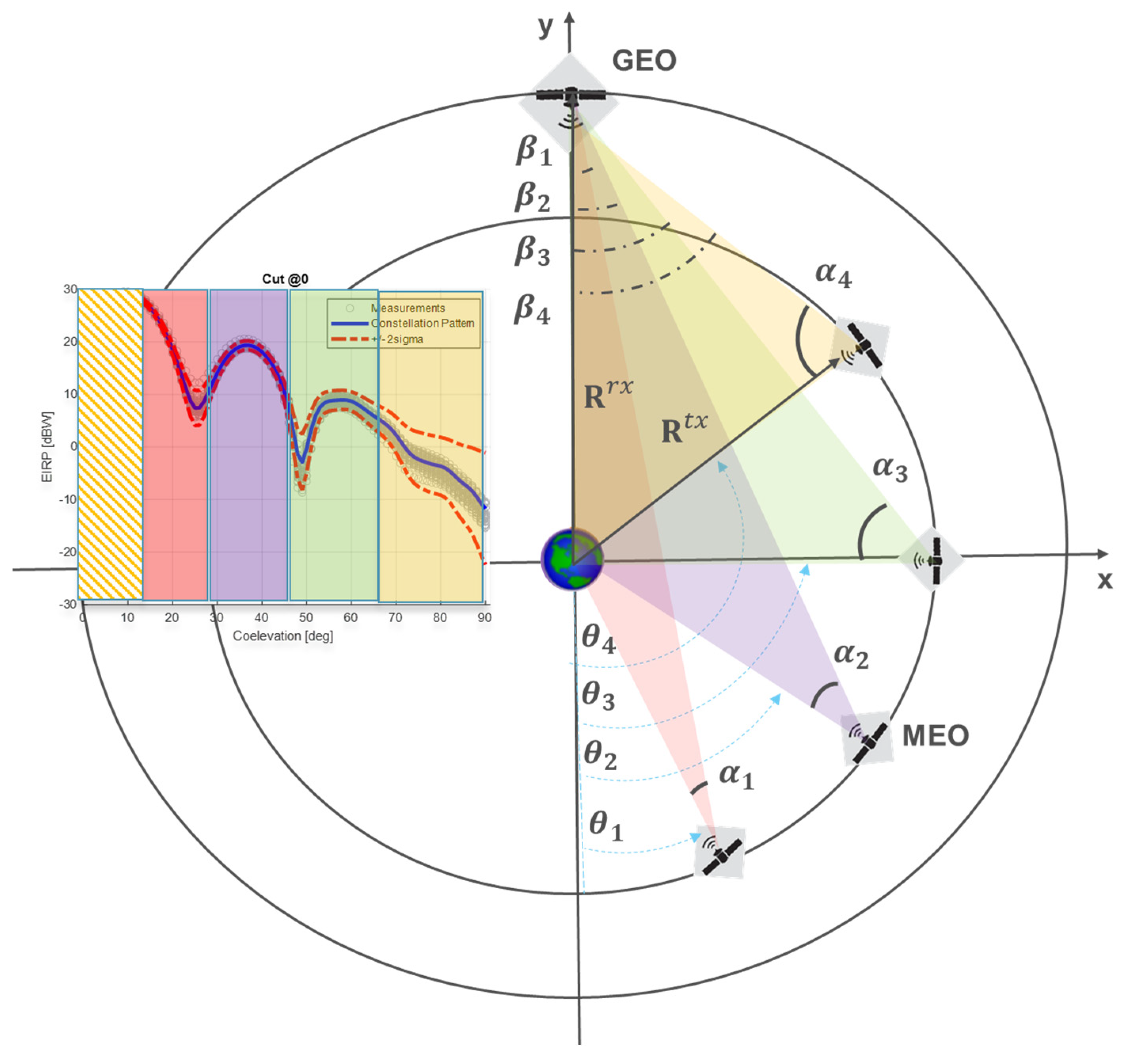
- A target spacecraft rx receiving the Galileo signal and crossing the plane defined by the orbital plane of a reference tx Galileo satellite. Such an event defines a simplified geometry condition where the rx user can be assumed at fixed position and the transmitting Galileo is located at its rising position along its orbit.
- An rx Earth-centred 2D reference frame lying in the Galileo orbital plane and considering y-axis aligned to . With this assumption, the 2D rx position vector is and depends on the user altitude considering only . In Figure 11, a GEO satellite use case is shown, so would be .
- Different crossing events i can be defined so far as the transmitting MEO rising position can be placed at any point in its orbit (circularly approximated). This is represented by different MEO SV positions drawn in Figure 11. Such a sequence of Galileo tx positions can be defined in the RXRF reference frame as with . It is assumed , where is the transmitting antenna boresight nadir-pointing direction. Attitude corrections, as per yaw steering, are outside the scope of the simplified geometry.
- The symmetry of the problem allows us to consider the subset of events where .
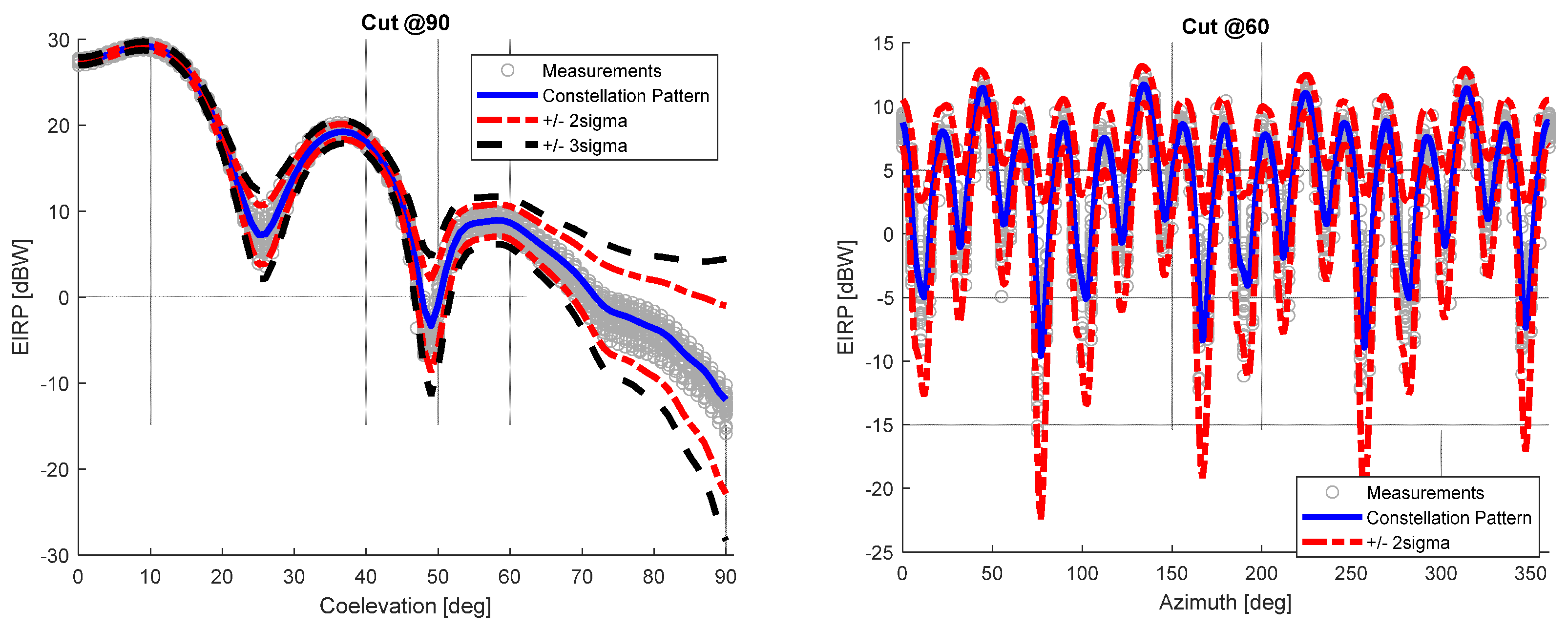
4.2. SSV Galileo E1 Characterization Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Acronyms
| AVE | Average |
| CW | Continuous Wave |
| dBW | Decibel Watt |
| dB/Hz | Decibel per Hertz |
| EIRP | Equivalent Isotropic Radiated Power |
| FOC | Galileo Full Operational Capability |
| GEO | Geostationary Earth Obit |
| GNSS | Global Navigation Satellite System |
| GRAP | Galileo Reference Antenna Pattern |
| HEO | High Earth Orbit |
| KPI | Key Performance Indicator |
| MEO | Medium Earth Orbit |
| SH | Spherical Harmonic |
| SSV | Space Service Volume |
| SV | Space Vehicle |
Appendix A
References
- International Committee on GNSS (ICG). The Interoperable Global Navigation Satellite Systems Space Service Volume, 2nd ed.; United Nations: New York, NY, USA, 2018. [Google Scholar]
- GPS Space Service Volume Ensuring Consistent Utility Across GPS Design Builds for Space Users; NASA: Washington, DC, USA, 2015.
- Marquis, W.; Reigh, D. The GPS Block IIR and IIR-M Broadcast L-Band Antenna Panel: Its Pattern and Performance. Navigation 2015, 62, 329–347. [Google Scholar] [CrossRef]
- Enderle, W.; Gini, F.; Schönemann, E.; Mayer, V. PROBA-3 Precise Orbit Determination Based on GNSS Observations, 32nd ed. In Proceedings of the International Technical Meeting of the Satellite Division of The Institute of Navigation: ION GNSS+ 2019, Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Moreau, M.C.; Davis, E.P.; Carpenter, J.R.; Kelbel, D.; Davis, G.W.; Axelrad PMoreau, M.C.; Davis, E.P.; Carpenter, J.R.; Kelbel, D.; Davis, G.W.; et al. Results from the GPS Flight Experiment on the High Earth Orbit AMSAT AO-40 Spacecraft. In Proceedings of the ION GPS 2002 Conference, Portland, OR, USA, 24–27 September 2002. [Google Scholar]
- Shehaj, E.; Capuano, V.; Botteron, C.; Blunt, P.; Farine, P.-A. GPS Based Navigation Performance Analysis within and beyond the Space Service Volume for Different Transmitters’ Antenna Patterns. Aerospace 2017, 4, 44. [Google Scholar] [CrossRef]
- Ji, G.-H.; Kwon, K.-H.; Won, J.-H. GNSS Signal Availability Analysis in SSV for Geostationary Satellites Utilizing multi-GNSS with First Side Lobe Signal over the Korean Region. Remote Sens. 2021, 13, 3852. [Google Scholar] [CrossRef]
- Menzione, F.; Sgammini, M.; Paonni, M. Reconstruction of Galileo Constellation Antenna Pattern for Space Service Volume Applications; Publications Office of the European Union: Luxembourg, 2024. [Google Scholar] [CrossRef]
- Mattes, S.; Rondineau, L.; Coq, L. Fast Antenna Far Field Characterization via Sparse Spherical Harmonic Expansion. IEEE Trans. Antennas Propag. 2017, 65, 5503–5510. [Google Scholar]
- Migliore, M.D.; Soldovieri, F.; Pierri, R. Far-field antenna pattern estimation from near-field data using a low-cost amplitude-only measurement setup. IEEE Trans. Instrum. Meas. 2005, 49, 71–76. [Google Scholar] [CrossRef]
- Behjoo, H.; Pirhadi, A.; Asvadi, R. Efficient Spherical Near-Field Antenna Measurement Using Compressive Sensing Method with Sparsity Estimation. IET Microw. Antennas Propag. 2019, 13, 1897–1903. [Google Scholar] [CrossRef]
- Allende-Alba, G.; Thoelert, S. Reconstructing antenna gain patterns of Galileo satellites for signal power monitoring. GPS Solut. 2020, 24, 22. [Google Scholar] [CrossRef]
- Allende-Alba, G.; Thoelert, S. An analysis of the on-orbit performance of Galileo satellite antennas using reconstructed gain patterns. GPS Solut. 2020, 24, 79. [Google Scholar] [CrossRef]
- Zheng, J.; Chen, X.; Liu, X.; Zhang, M.; Liu, B.; Huang, Y. An Improved Method for Reconstructing Antenna Radiation Pattern in a Loaded Reverberation Chamber. IEEE Trans. Instrum. Meas. 2022, 71, 8001812. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J.H.; Friedman, J.H. The Elements of Statistical Learning Data Mining, Inference, and Prediction, 2nd ed.; Springer: New York, NY, USA, 2009. [Google Scholar]
- Moore, K.M.; Bloxham, J. The construction of sparse models of Mars’ crustal magnetic field: Sparse models of Mars’ magnetic field. J. Geophys. Res. Planets 2017, 122, 1443–1457. [Google Scholar] [CrossRef]
- Bertrand, Q.; Massias, M.; Gramfort, A.; Salmon, J. Handling correlated and repeated measurements with the smoothed multivariate square-root Lasso. In Proceedings of the Annual Conference on Neural Information Processing Systems 2019, NeurIPS 2019, Vancouver, BC, Canada, 8–14 December 2019. [Google Scholar]
- Fitzmaurice, G.; Davidian, M.; Verbeke, G.; Molenberghs, G. Longitudinal Data Analysis; Chapman and Hall/CRC: New York, NY, USA, 2008. [Google Scholar]
- Gustavsson, S.M.; Johannesson, S.; Sallsten, G.; Andersson, E.M. Linear Maximum Likelihood Regression Analysis for Untransformed Log-Normally Distributed Data. Open J. Stat. 2012, 2, 389–400. [Google Scholar] [CrossRef]
- Galileo Open Service Signal in Space Interface Control Document, Issue 2.1, November 2023. Available online: https://www.gsc-europa.eu/ (accessed on 1 February 2024).
- Kaplan, E.; Hegarty, C. Understanding GPS/GNSS: Principles and Applications, 3rd ed.; Artech: Morristown, NJ, USA, 2017. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Menzione, F.; Paonni, M. 3D Galileo Reference Antenna Pattern for Space Service Volume Applications. Sensors 2024, 24, 2220. https://doi.org/10.3390/s24072220
Menzione F, Paonni M. 3D Galileo Reference Antenna Pattern for Space Service Volume Applications. Sensors. 2024; 24(7):2220. https://doi.org/10.3390/s24072220
Chicago/Turabian StyleMenzione, Francesco, and Matteo Paonni. 2024. "3D Galileo Reference Antenna Pattern for Space Service Volume Applications" Sensors 24, no. 7: 2220. https://doi.org/10.3390/s24072220
APA StyleMenzione, F., & Paonni, M. (2024). 3D Galileo Reference Antenna Pattern for Space Service Volume Applications. Sensors, 24(7), 2220. https://doi.org/10.3390/s24072220