
Automatic Tracking Based on Weighted Fusion Back Propagation in UWB for IoT Devices †



Abstract
1. Introduction
2. Hybrid Filtering Localization Algorithm
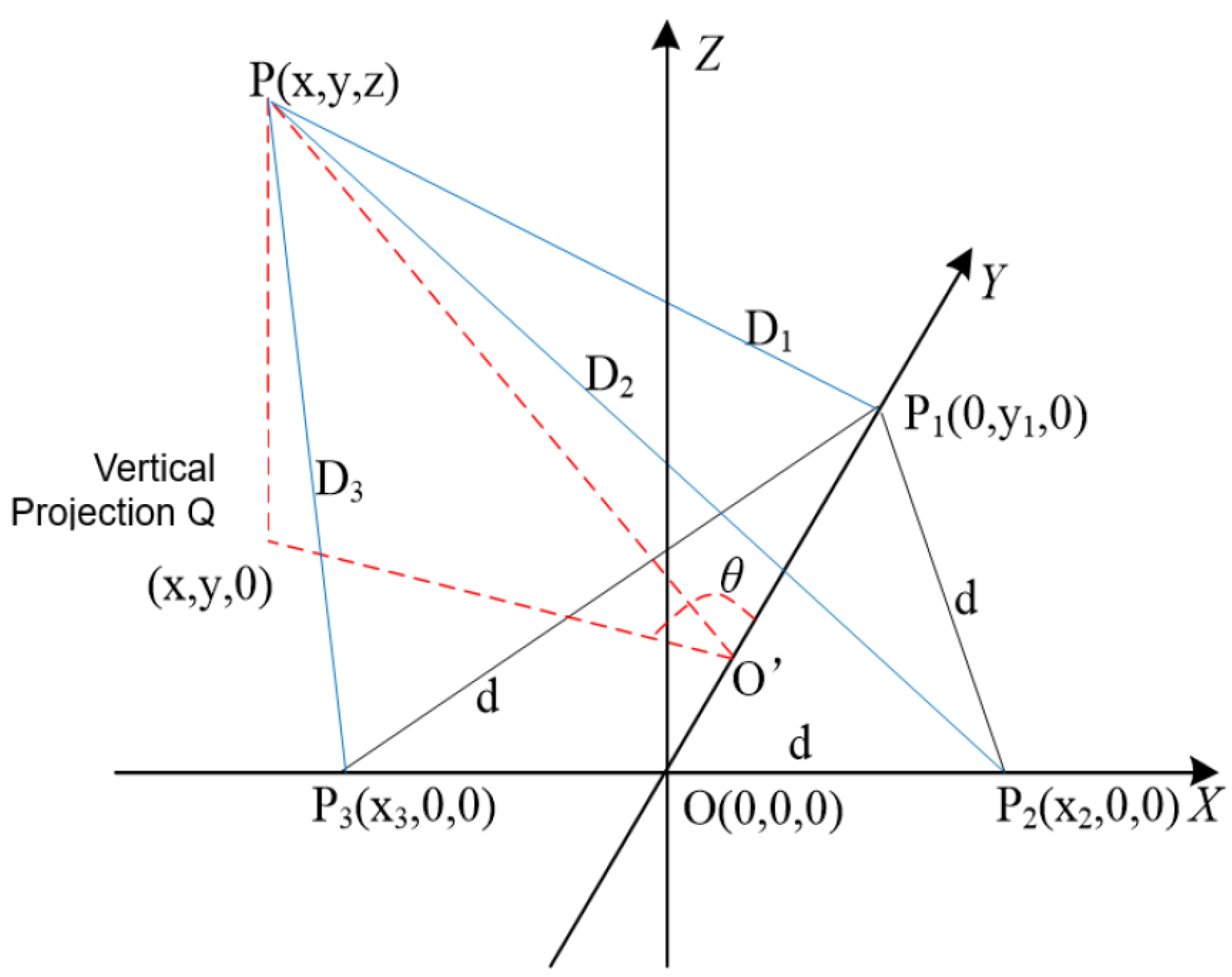
2.1. Time Difference of Arrival Positioning Model
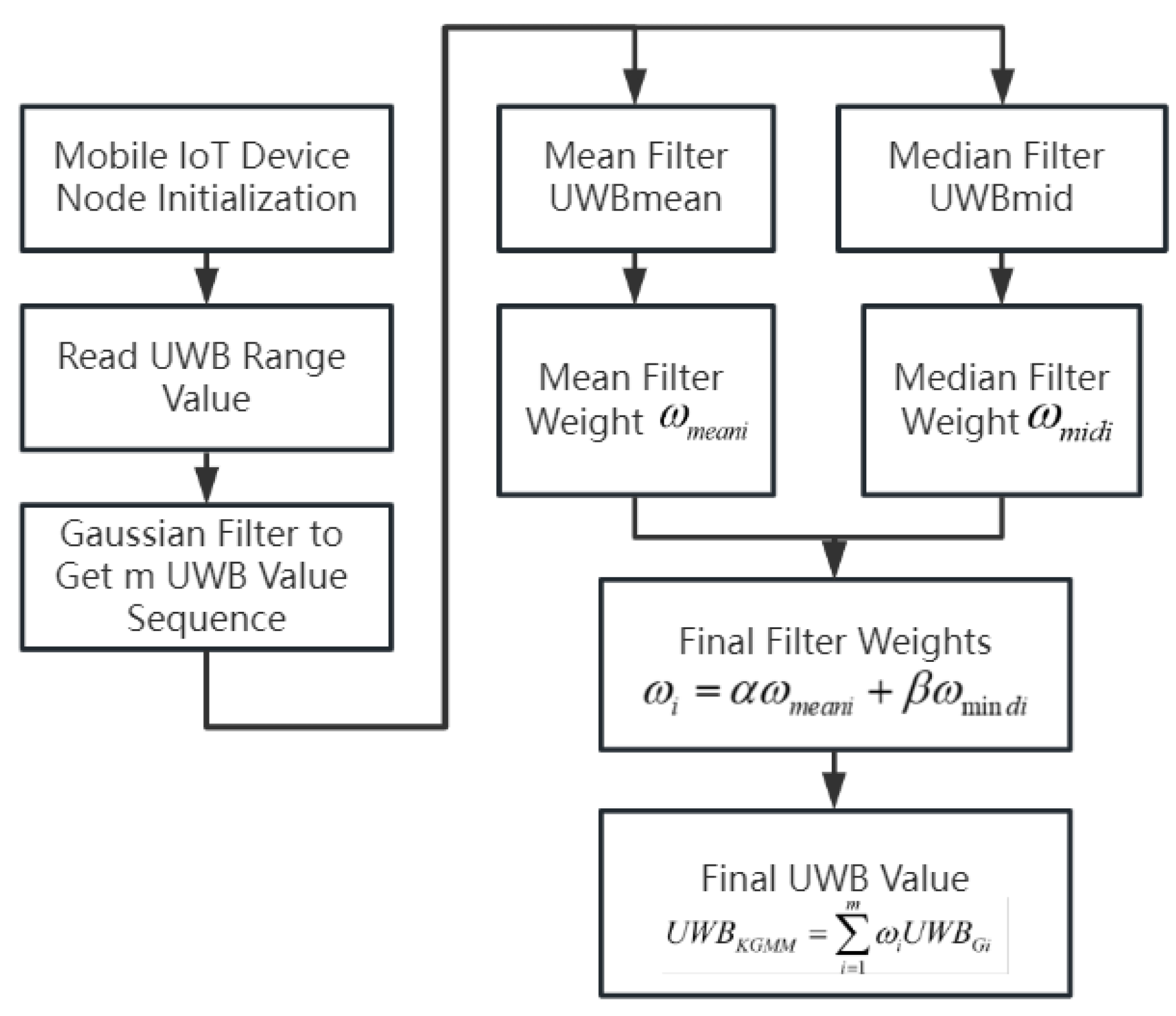
2.2. Weighted Hybrid Filtering Localization Model
2.3. Weighted Fusion Model
3. BP Neural Network Localization Algorithm
3.1. NLOS Error Model
3.2. Chan Algorithm
3.3. BP Neural Network Error Correction
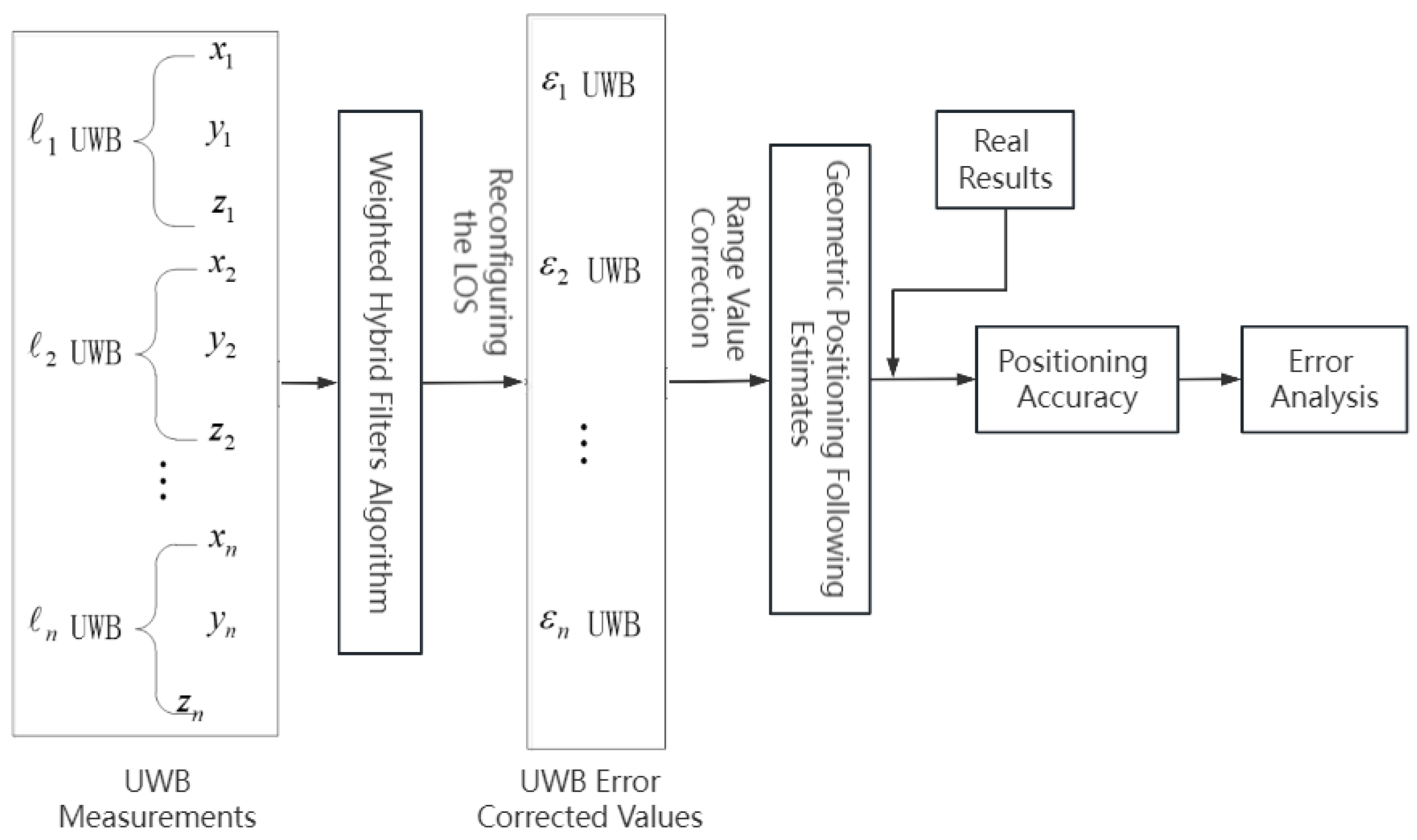
3.4. Weighted Fusion BP Neural Network Localization Algorithm
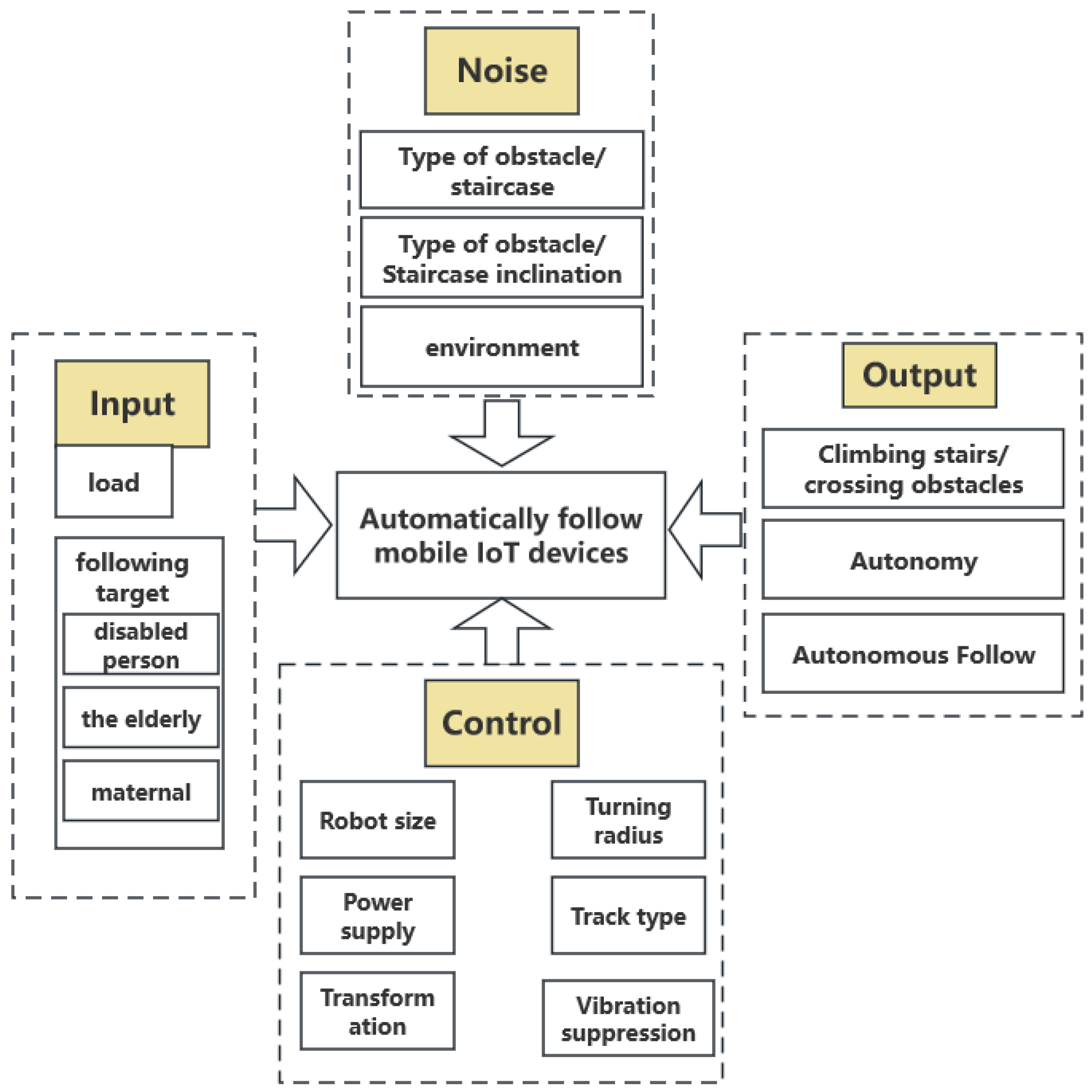
4. Weighted Hybrid Filter Following Algorithm
5. Experiments and Analysis of Mobile IoT Device Localization and Following
5.1. Experimental Testing and Analysis of Mobile IoT Device Localization
5.1.1. Hybrid Filtering Localization Analysis
5.1.2. Experimental Analysis of BP Neural Network Localization
5.1.3. Weighted Fusion BP Neural Network Localization Analysis
5.2. Experimental Testing and Analysis of Mobile IoT Device Following
6. Conclusions
7. Potential Application Scenarios and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| NLOS | Non-Line of Sight |
| LOS | Line of Sight |
| UWB | Ultra-Wideband |
| HFWF-BP | hybrid filtering weighted fusion back propagation |
| WF-BP | weighted fusion back propagation |
| RMSE | Root-Mean-Squared Error |
| TDOA | Time Difference of Arrival |
| EWMA | Exponentially weighted moving average |
| GMM | Gaussian median mean |
| BP | back propagation |
| CDF | Cumulative Distribution Function |
References
- Wang, H.; Ma, X.; Zhao, Y. A mixed-effects model of two-phase degradation process for reliability assessment and RUL prediction. Microelectron. Reliab. 2020, 107, 113622. [Google Scholar] [CrossRef]
- Gao, H.; Li, X.; Song, X. A Fusion Strategy for Vehicle Positioning at Intersections Utilizing UWB and Onboard Sensors. Sensors 2024, 24, 476. [Google Scholar] [CrossRef] [PubMed]
- De Cock, C.; Tanghe, E.; Joseph, W.; Plets, D. Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning. Sensors 2023, 23, 8289. [Google Scholar] [CrossRef] [PubMed]
- Pei, H.; Hu, C.; Si, X.; Zheng, J.; Zhang, Q.; Zhang, Z.; Pang, Z. Remaining useful life prediction for nonlinear degraded equipment with bivariate time scales. IEEE Access 2019, 7, 165166–165180. [Google Scholar] [CrossRef]
- Feng, T.; Yu, Y.; Wu, L.; Bai, Y.; Xiao, Z.; Lu, Z. A human-tracking robot using ultra wideband technology. IEEE Access 2018, 6, 42541–42550. [Google Scholar] [CrossRef]
- Tse, R.; Mirri, S.; Tang, S.K.; Pau, G.; Salomoni, P. Modelling and visualizing people flow in smart buildings: A case study in a university campus. In Proceedings of the Conference on Information Technology for Social Good, Roma, Italy, 9–11 September 2021; pp. 309–312. [Google Scholar]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Leitch, S.G.; Ahmed, Q.Z.; Abbas, W.B.; Hafeez, M.; Laziridis, P.I.; Sureephong, P.; Alade, T. On Indoor Localization Using WiFi, BLE, UWB, and IMU Technologies. Sensors 2023, 23, 8598. [Google Scholar] [CrossRef]
- Gong, H.; Sim, J.; Likhachev, M.; Shi, J. Multi-hypothesis motion planning for visual object tracking. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 619–626. [Google Scholar]
- Liu, J.; Wang, B.; Zhou, L.; Zheng, Y. Automatic Follow-up Trolley Design Based on UWB Technology. Agric. Equip. Veh. Eng. 2019, 57, 8–12. [Google Scholar]
- Xu, Q.K.; Song, Z.Y. Design of positioning system of autonomous following robot based on UWB technology. Comput. Eng. Des. 2019, 40, 3337–3341. [Google Scholar]
- Bi, J.; Zhao, M.; Yao, G.; Cao, H.; Feng, Y.; Jiang, H.; Chai, D. PSOSVRPos: WiFi indoor positioning using SVR optimized by PSO. Expert Syst. Appl. 2023, 222, 119778. [Google Scholar] [CrossRef]
- Scavino, E.; Abd Rahman, M.A.; Farid, Z. An Improved Hybrid Indoor Positioning Algorithm via QPSO and MLP Signal Weighting. Comput. Mater. Contin. 2023, 74. [Google Scholar] [CrossRef]
- Pheng, S.; Li, J.; Luo, X.; Zhong, Y.; Jiang, Z. Bluetooth-Based WKNNPF and WKNNEKF Indoor Positioning Algorithm. In Proceedings of the 2021 13th International Conference on Advanced Computational Intelligence (ICACI), Wanzhou, China, 14–16 May 2021; pp. 378–382. [Google Scholar]
- Yue, D.; Shang, S.; Feng, K.; Wang, H.; He, X.; Zhao, Z.; Zhang, N.; Zuo, B.; Wang, D. Research on the Model of a Navigation and Positioning Algorithm for Agricultural Machinery Based on the IABC-BP Network. Agriculture 2023, 13, 1769. [Google Scholar] [CrossRef]
- Ding, G.; Hou, S. CFRP drive shaft damage identification and localization based on FBG sensing network and GWO-BP neural networks. Opt. Fiber Technol. 2024, 82, 103631. [Google Scholar] [CrossRef]
- Biber, P.; Straßer, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No. 03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2743–2748. [Google Scholar]
- Razaque, A.; Yoo, J.; Bektemyssova, G.; Ali, M.; Ryskhan, S.; Alotaibi, A.; Hwang, J.; Alshammari, M. Energy-Efficient TRIZ-Inspired Paradigm to Automate Consumer Electronic Devices. Preprints 2024. [Google Scholar] [CrossRef]
- Xue, S. STM32U5-STMicroelectronics’ Newly Crafted Ultra-Low Power MCU Flagship. Microcontrol. Embed. Syst. 2021, 21, 93. [Google Scholar]
- Zhang, Y. Design of UWB Indoor Positioning System Based on DWM1000. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2018. [Google Scholar]
- Jiao, H.L. Research on UWB Positioning Accuracy Test and Optimization in Complex Environment. Master’s Thesis, Hainan University, Haikou, China, 2018. [Google Scholar]
- Fokin, G.; Kireev, A.; Al-odhari, A.H.A. TDOA positioning accuracy performance evaluation for arc sensor configuration. In Proceedings of the 2018 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 14–15 March 2018; pp. 1–5. [Google Scholar]
- Pei, L.; Liu, D.H.; Qian, J.C. A Survey of Indoor Positioning Technology and Application. Navig. Position. Timing 2017, 4, 1–10. [Google Scholar]
- Zhang, Y.; Chen, H.; Guo, Y.; Nie, S. Indoor positioning algorithm based on weighted mixed DGMM filtering RSSI. J. Navig. Position. 2022, 10, 25–30. [Google Scholar]
- Razaque, A.; Frej, M.B.H.; Bektemyssova, G.; Almi’ani, M.; Amsaad, F.; Alotaibi, A.; Jhanjhi, N.Z.; Ali, M.; Amanzholova, S.; Alshammari, M. Quality of Service Generalization using Parallel Turing Integration Paradigm to Support Machine Learning. Electronics 2023, 12, 1129. [Google Scholar] [CrossRef]
- Chen, K.; Lopez, B.T.; Agha-mohammadi, A.A.; Mehta, A. Direct lidar odometry: Fast localization with dense point clouds. IEEE Robot. Autom. Lett. 2022, 7, 2000–2007. [Google Scholar] [CrossRef]
- Chan, Y.T.; Hang, H.Y.C.; Ching, P.C. Exact and approximate maximum likelihood localization algorithms. IEEE Trans. Veh. Technol. 2006, 55, 10–16. [Google Scholar] [CrossRef]
- Wu, N.; Xiong, Y.; Wang, H.; Kuang, J. A performance limit of TOA-based location-aware wireless networks with ranging outliers. IEEE Commun. Lett. 2015, 19, 1414–1417. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology and Algorithm | Accuracy | Range | Device Price | Deployment Difficulty | |
|---|---|---|---|---|---|
| References [7,8] | Computer vision | Highly affected by the environment | Depends, typically within 5 m | Expensive | Difficult and restricted |
| Reference [9] | UWB | 30–40 cm | 50–100 m | Moderate cost | Average |
| Reference [10] | Kalman filter UWB | 20–30 cm | 50–100 m | Moderate cost | General |
| Reference [12] | Wireless LAN (WiFi) | 50–60 cm | 10–20 m | Low cost | Easy to deploy |
| Reference [13] | Weighted K-nearest neighbors and Kalman filtering | Around 20 cm | 50–100 m | Moderate cost | Average |
| This research | HFWF-BP neural network localization algorithm | 10 cm | 50–100 m | Moderate cost | Average |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Shen, L.; Yao, J.; Wang, T.; Tang, S.-K.; Mirri, S. Automatic Tracking Based on Weighted Fusion Back Propagation in UWB for IoT Devices. Sensors 2024, 24, 1257. https://doi.org/10.3390/s24041257
Zhang B, Shen L, Yao J, Wang T, Tang S-K, Mirri S. Automatic Tracking Based on Weighted Fusion Back Propagation in UWB for IoT Devices. Sensors. 2024; 24(4):1257. https://doi.org/10.3390/s24041257
Chicago/Turabian StyleZhang, Boliang, Lu Shen, Jiahua Yao, Tenglong Wang, Su-Kit Tang, and Silvia Mirri. 2024. "Automatic Tracking Based on Weighted Fusion Back Propagation in UWB for IoT Devices" Sensors 24, no. 4: 1257. https://doi.org/10.3390/s24041257
APA StyleZhang, B., Shen, L., Yao, J., Wang, T., Tang, S.-K., & Mirri, S. (2024). Automatic Tracking Based on Weighted Fusion Back Propagation in UWB for IoT Devices. Sensors, 24(4), 1257. https://doi.org/10.3390/s24041257