
Displacement Sensing of an Active String Actuator Using a Step-Index Multimode Optical Fiber Sensor †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
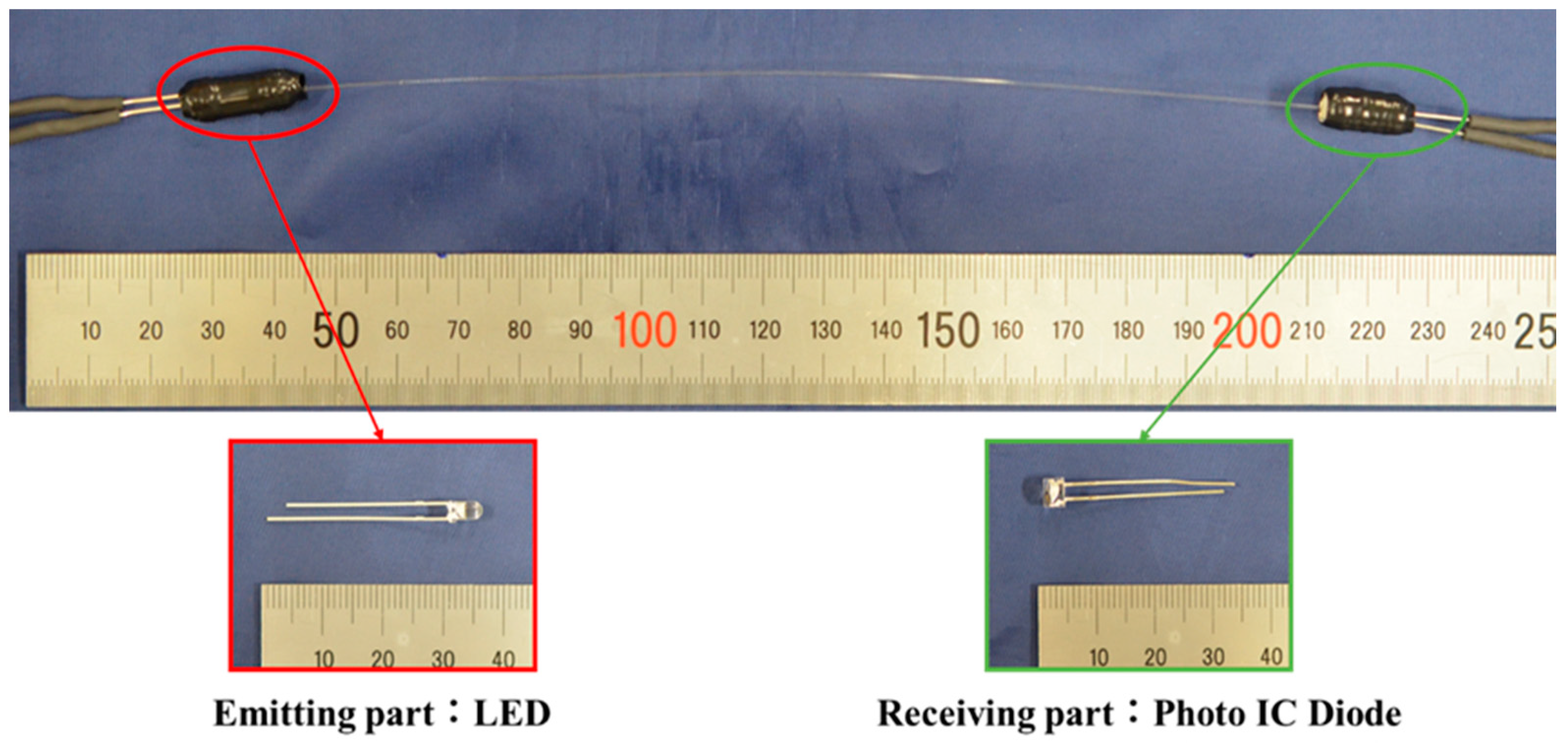
- Simple structure: The sensing system comprises only three components, namely, an optical fiber, a light emitter, and a light receiver. Almost all of the components are commercially available, making them inexpensive and easy to manufacture.
- Flexible: The light emitter and receiver are located outside the drive unit, and the optical fiber located in the drive unit is flexible and thin.
2. Materials and Methods
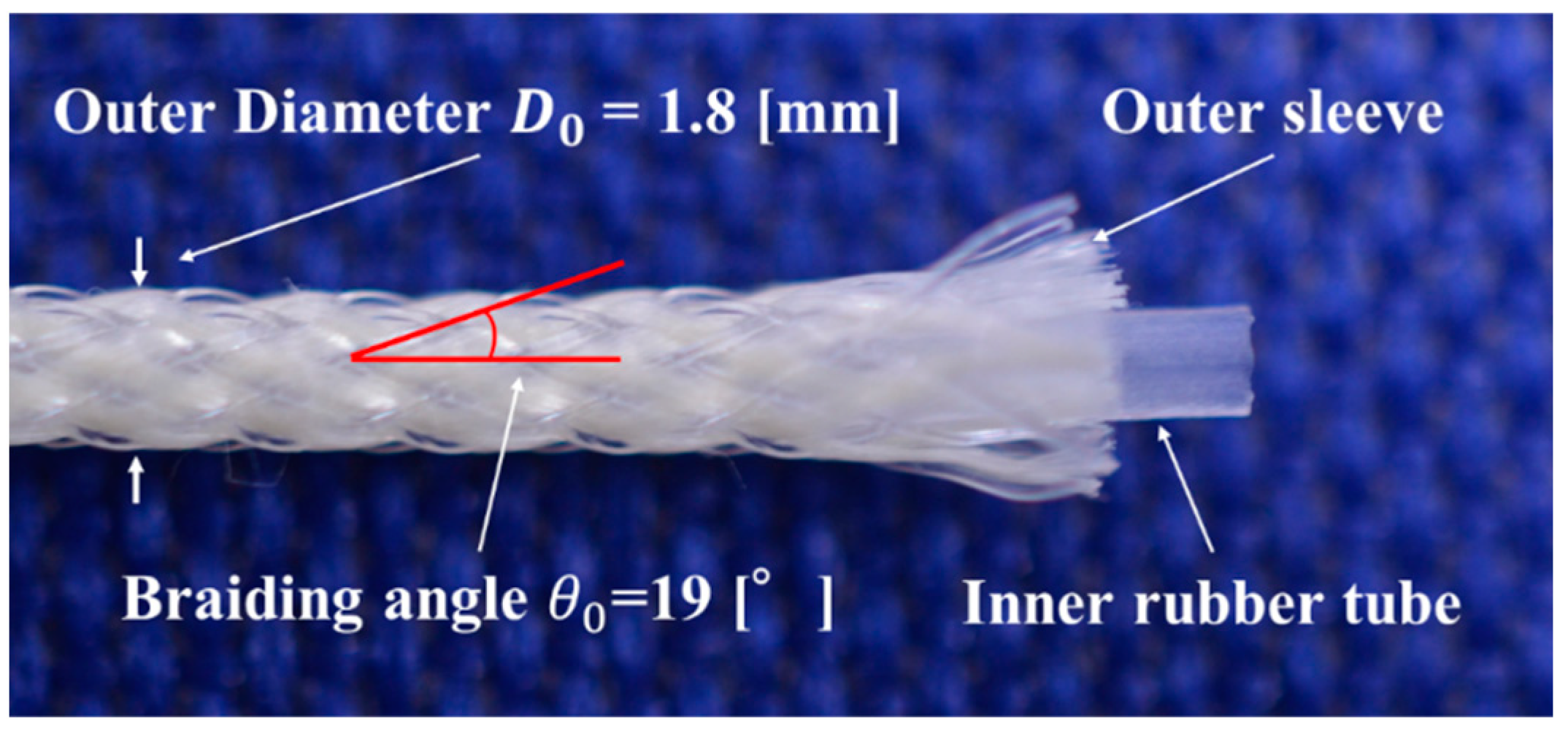
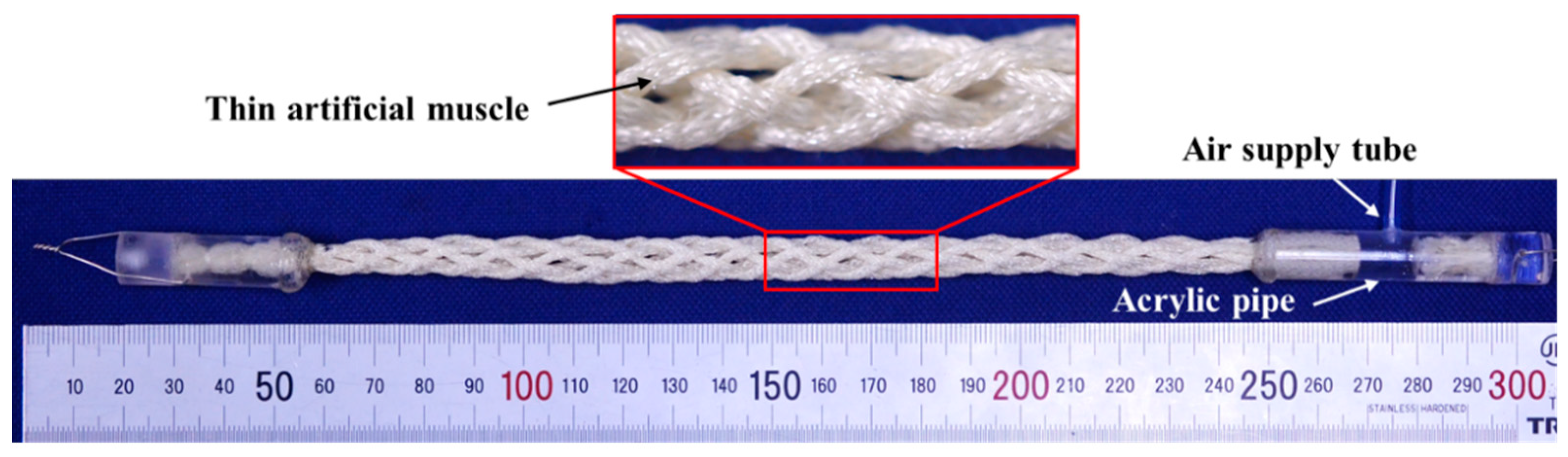
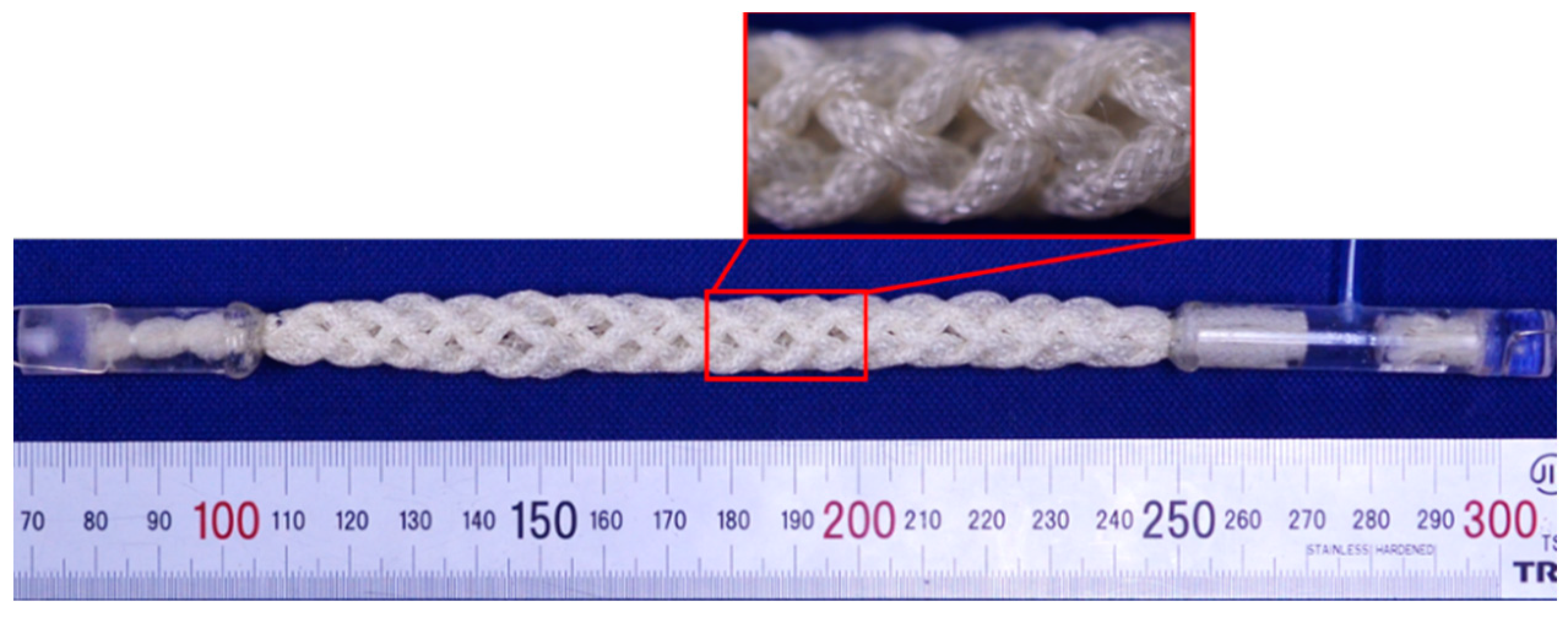
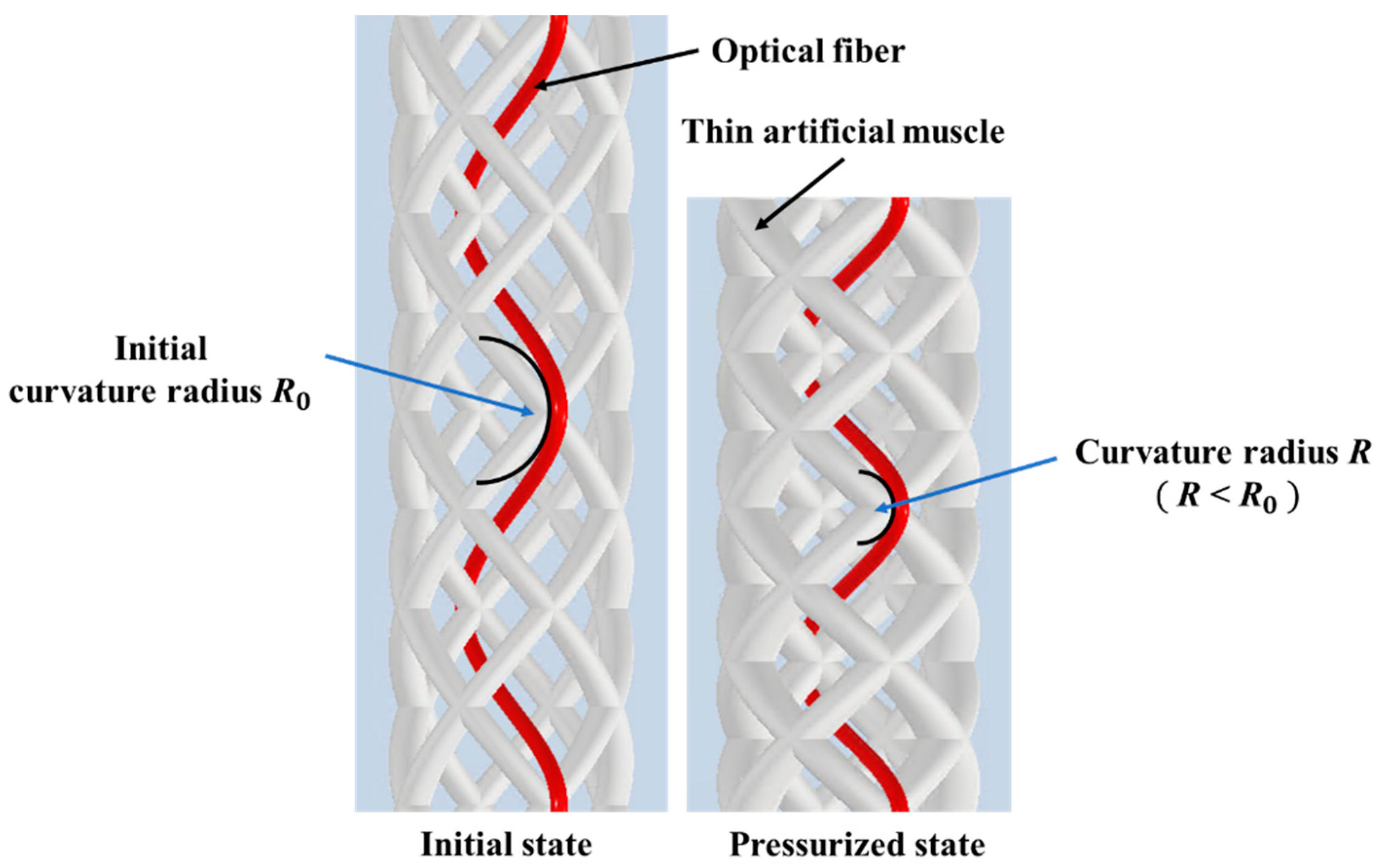
2.1. Thin Artificial Muscles and Active String Actuator
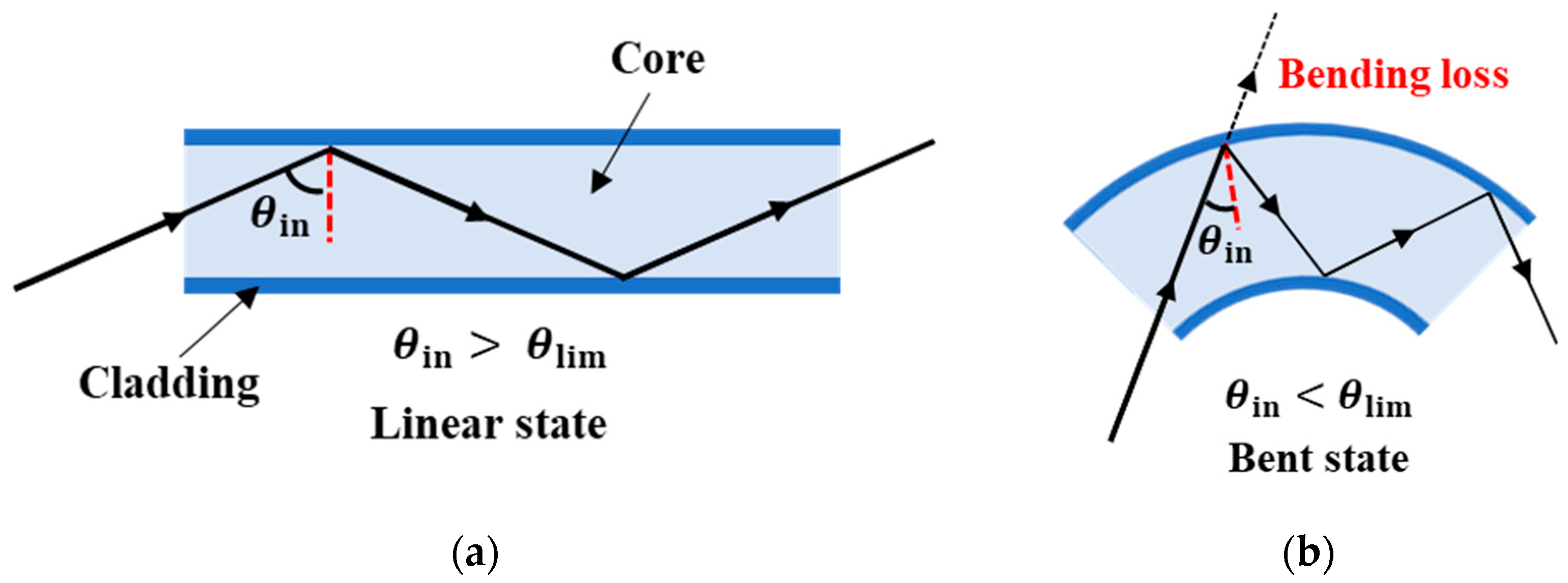
2.2. Step-Index Multimode Optical Fiber Sensor
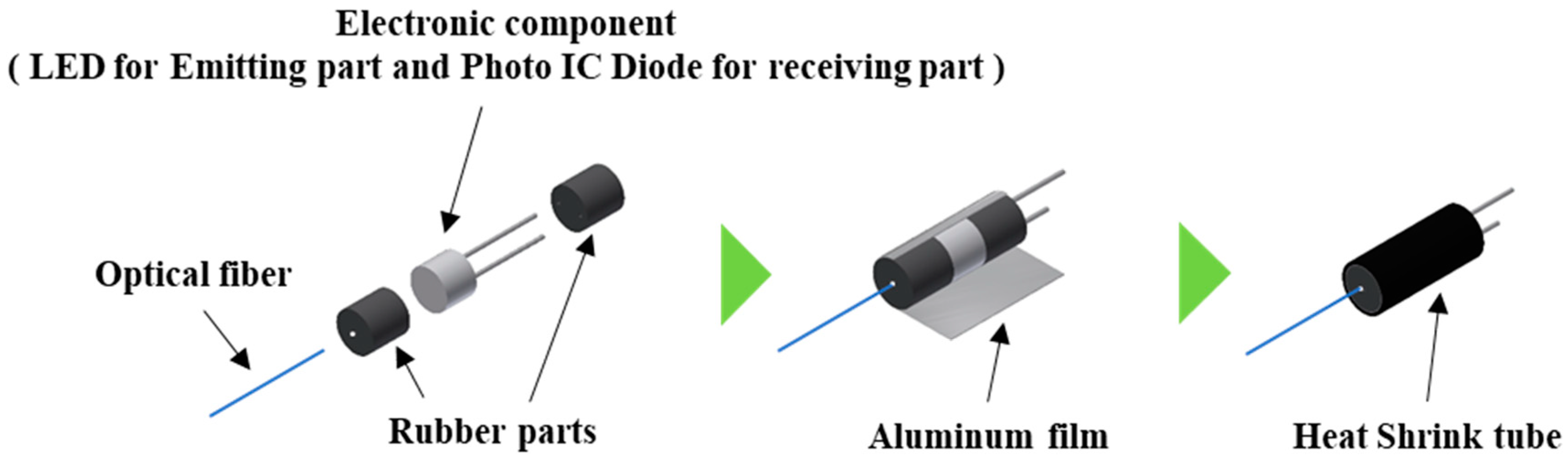
2.3. Active String Actuator with Optical Fiber Sensor
2.4. Experimental System
3. Results and Discussion
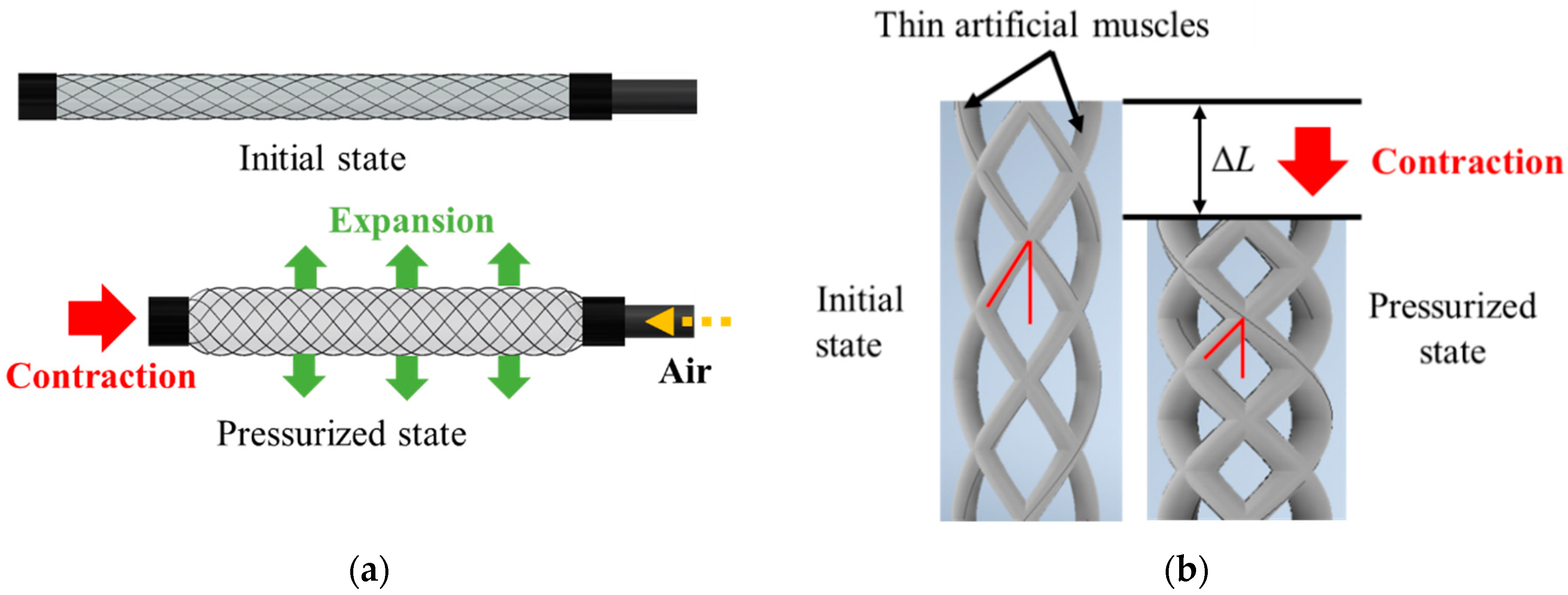
3.1. Contraction Characteristics of the Active String Actuator
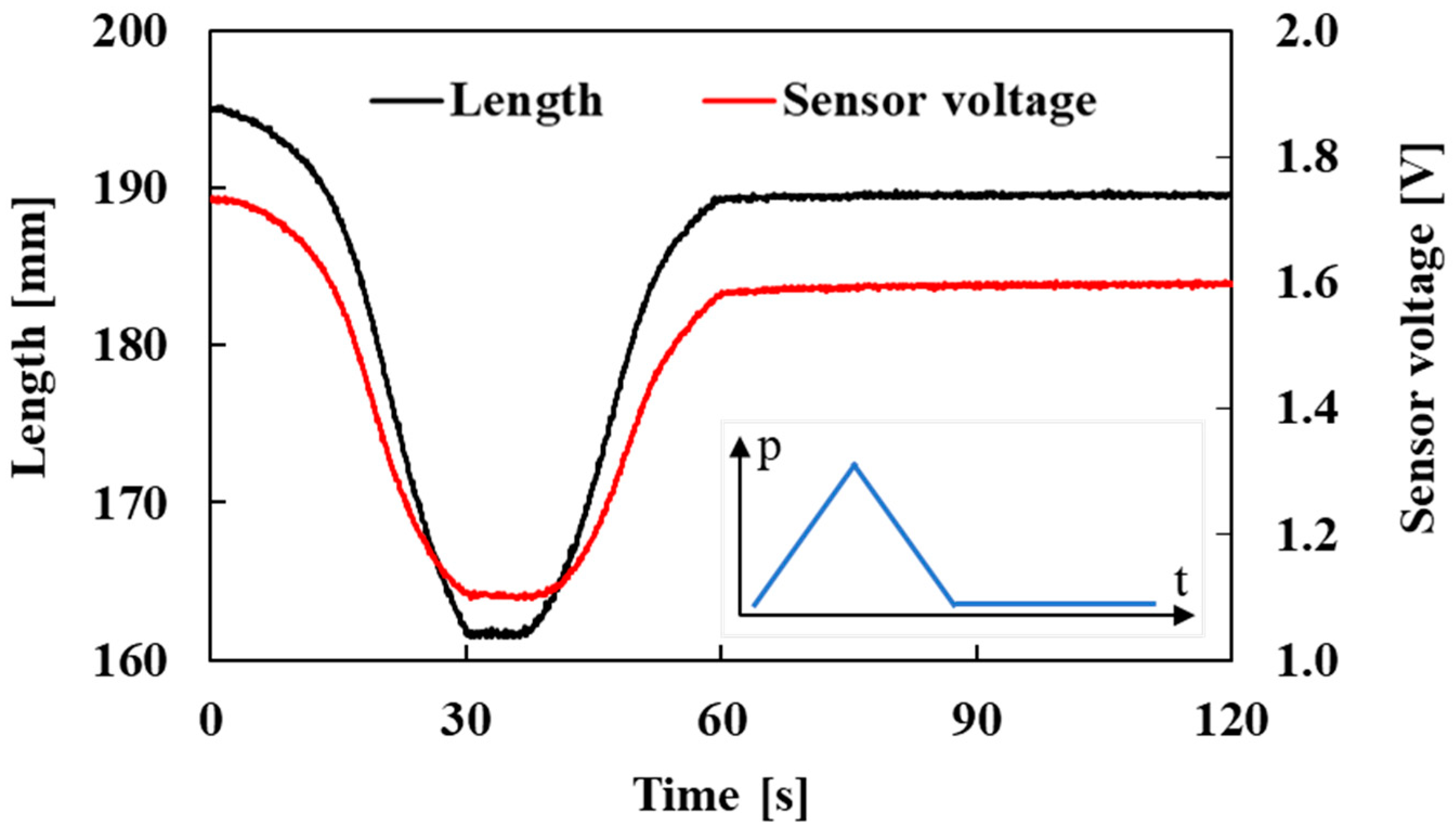
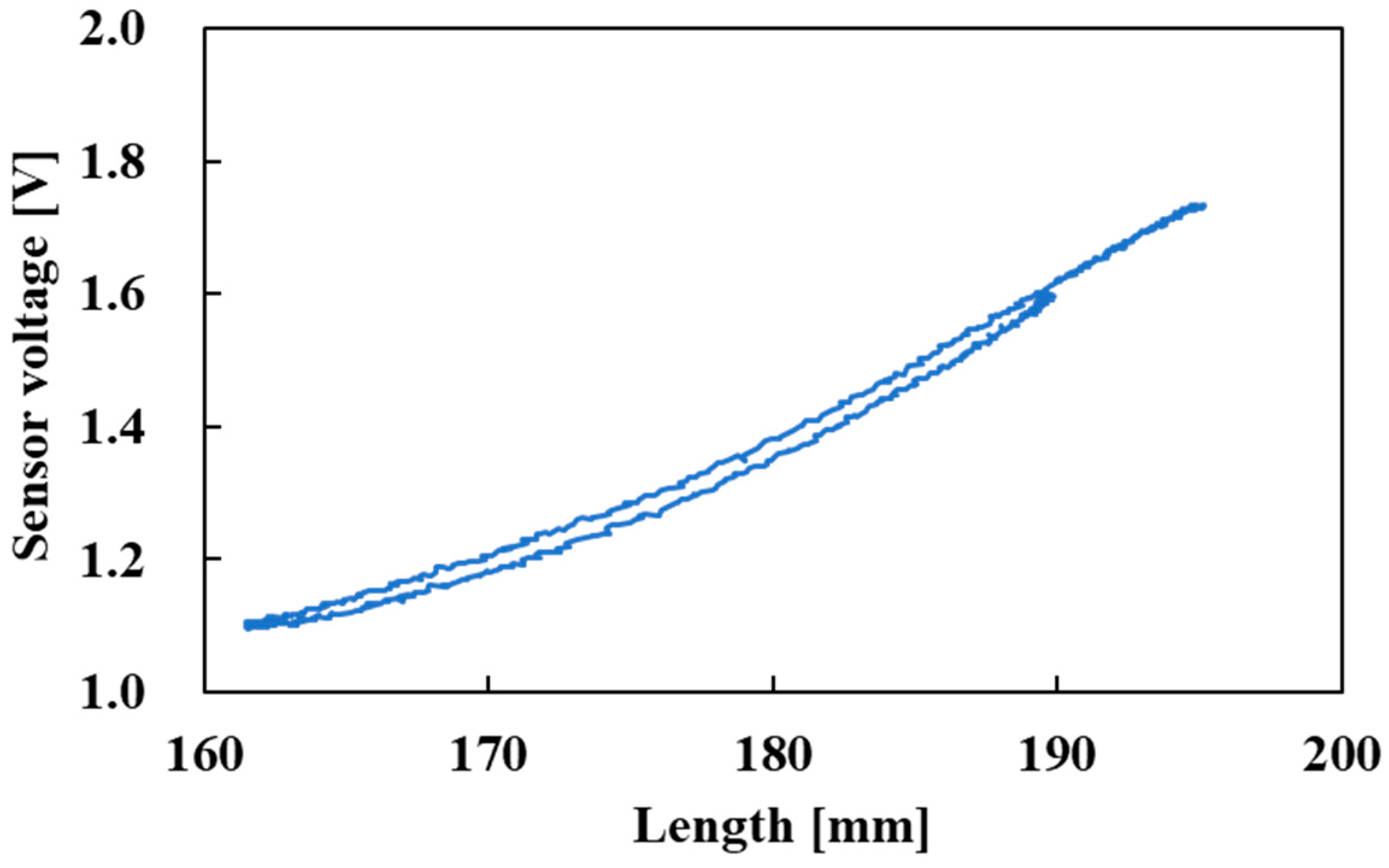
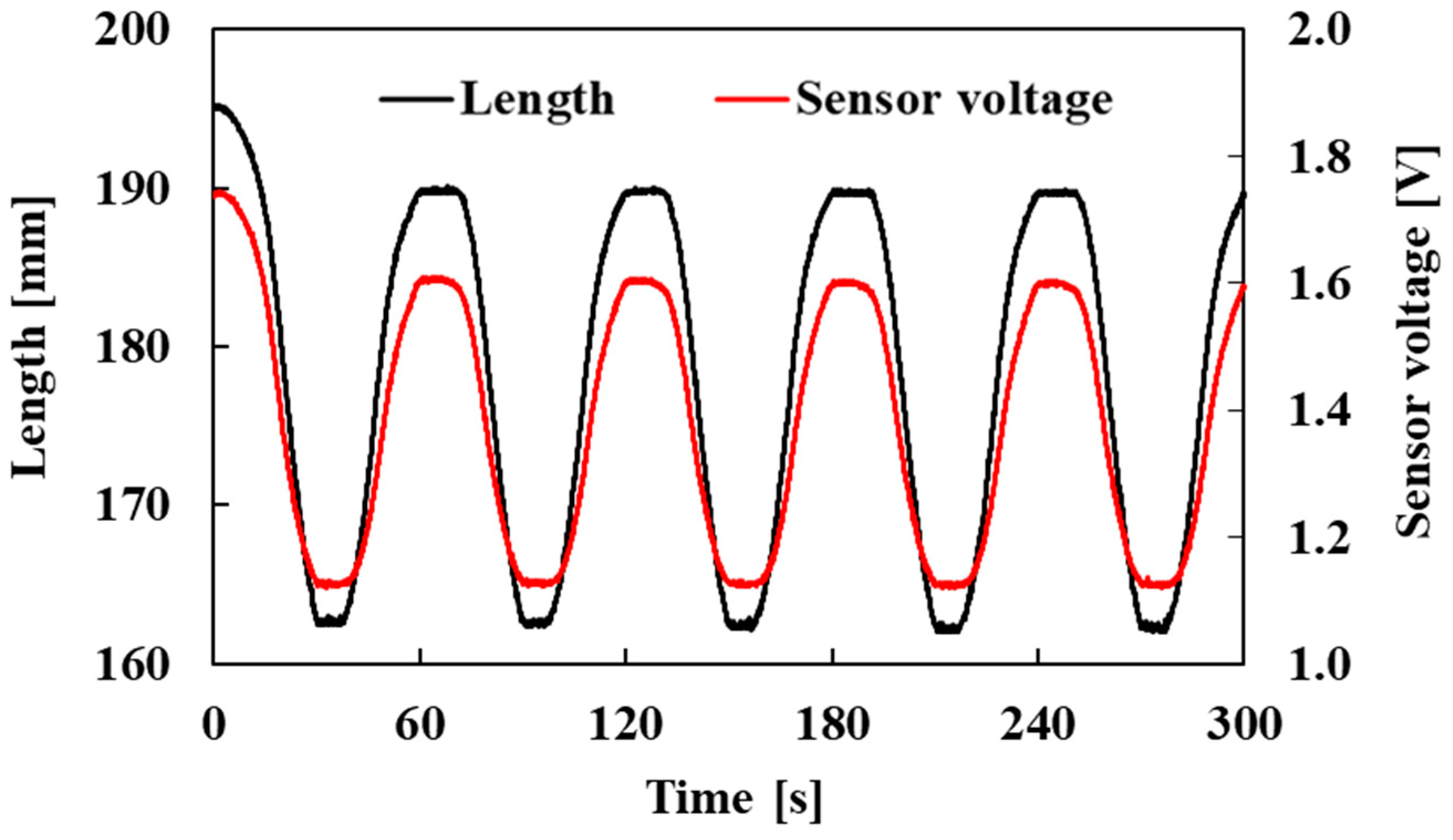
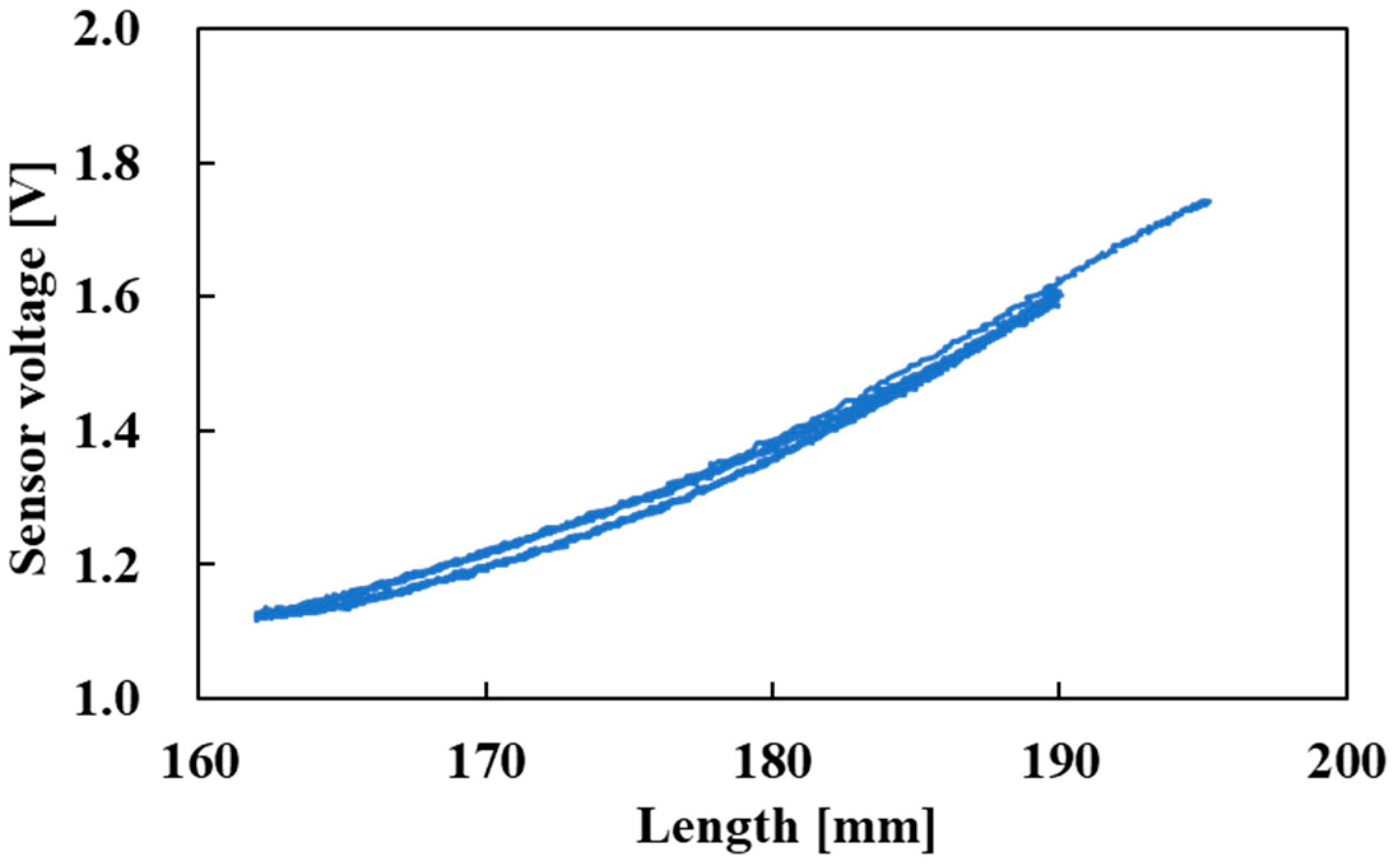
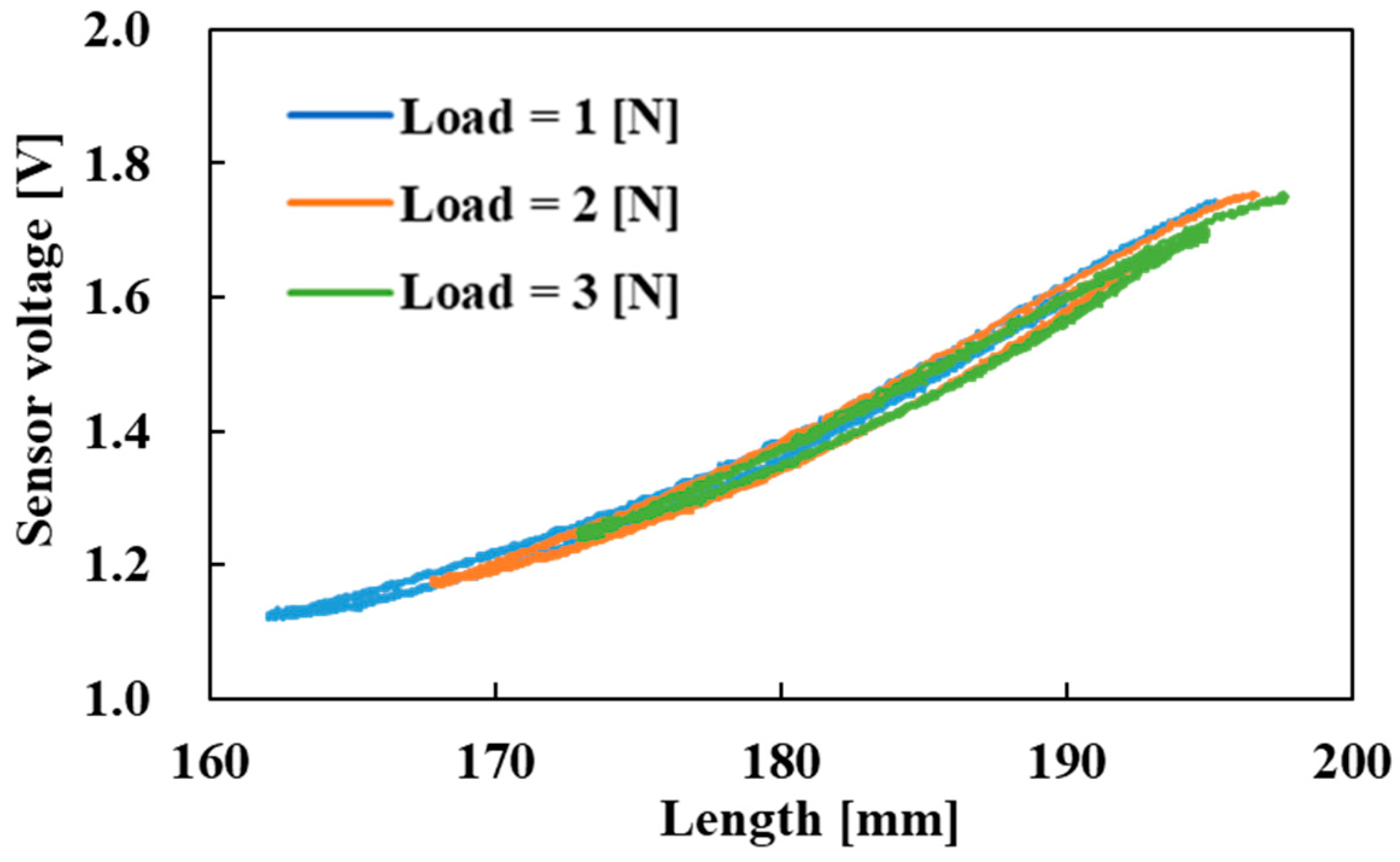
3.2. Characteristics of the Active String Actuator with the Optical Fiber Sensor
4. Conclusions
- The integration of the optical fiber sensor reduced the contraction of the active string actuator by 1.5 mm, which is 4.5% of the contraction of the active string actuator without the optical fiber. This reduction owes to the stiffness of the optical fiber and friction between the fiber and the active string; however, the degree of reduction was small.
- The sensor voltage acquired using the embedded optical fiber sensor changed with the length of the active string actuator. This suggests that it is possible to estimate the displacement of the active string actuator using the optical fiber sensor.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gaylord, R.H. Fluid Actuated Motor System and Stroking Device. U.S. Patent 2-238-058, 22 July 1958. [Google Scholar]
- DARWING Power Assist Glove EX. Available online: https://www.daiyak.co.jp/product/detail/?id=907 (accessed on 22 March 2022).
- Muscle Suit Every. Available online: https://innophys.net/musclesuit (accessed on 22 March 2022).
- Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Design of Thin McKibben Muscle and Multifilament Structure. Sens. Actuators A Phys. 2017, 261, 66–74. [Google Scholar] [CrossRef]
- Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Active Textile Braided in Three Strands with Thin McKibben Muscle. Soft Robot. 2019, 6, 250–262. [Google Scholar] [CrossRef] [PubMed]
- Koizumi, S.; Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Braiding Thin McKibben Muscles to Enhance Their Contracting Abilities. IEEE Robot. Autom. Lett. 2018, 3, 3240–3246. [Google Scholar] [CrossRef]
- Abe, T.; Koizumi, S.; Nabae, H.; Endo, G.; Suzumori, K.; Sato, N.; Adachi, M.; Takamizawa, F. Fabrication of “18 Weave” Muscles and Their Application to Soft Power Support Suit for Upper Limbs Using Thin McKibben Muscle. IEEE Robot. Autom. Lett. 2019, 4, 2532–2538. [Google Scholar] [CrossRef]
- Hiramitsu, T.; Suzumori, K.; Nabae, H.; Endo, G. Experimental Evaluation of Textile Mechanisms Made of Artificial Muscles. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019. [Google Scholar] [CrossRef]
- Koizumi, S.; Chang, T.; Nabae, H.; Endo, G.; Suzumori, K.; Mita, M.; Saitoh, K.; Hatakeyama, K.; Chida, S.; Shimada, Y. Soft Robotic Gloves with Thin McKibben Muscles for Hand Assist and Rehabilitation. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020. [Google Scholar] [CrossRef]
- Takada, M.; Wakimoto, S.; Oshikawa, T.; Ueda, T.; Kanda, T. Active Cloth Fabricated by a Flat String Machine and its Application to a Safe Wheelchair System. J. Robot. Mechatron. 2020, 32, 1010–1018. [Google Scholar] [CrossRef]
- Abe, T.; Koizumi, S.; Nabae, H.; Endo, G.; Suzumori, K. Muscle Textile to Implement Soft Suit to Shift Balancing Posture of the Body. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018. [Google Scholar] [CrossRef]
- Kurumaya, S.; Suzumori, K.; Nabae, H.; Wakimoto, S. Musculoskeletal Lower-Limb Robot Driven by Multifilament Muscles. Robomech J. 2016, 3, 18. [Google Scholar] [CrossRef]
- Doi, T.; Wakimoto, S.; Suzumori, K.; Mori, K. Proposal of Flexible Robotic Arm with Thin McKibben Actuators Mimicking Octopus Arm Structure. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar] [CrossRef]
- Tian, W.; Wakimoto, S.; Kanda, T.; Yamaguchi, D. Fabrication of “Active String” using Thin Artificial Muscles by String Production Process. In Proceedings of the Mechanical Engineering Congress (MECJ-21), Online, Japan, 5–8 September 2021. (In Japanese). [Google Scholar]
- Wakimoto, S.; Suzumori, K.; Kanda, T. Development of Intelligent McKibben Actuator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Seoul, Korea, 5–9 June 2005. [Google Scholar]
- Park, Y.L.; Wood, R.J. Smart Pneumatic Artificial Muscle Actuator with Embedded Microfluidic Sensing. In Proceedings of the IEEE SENSORS 2013, Baltimore, MD, USA, 3–6 November 2013. [Google Scholar] [CrossRef]
- Felt, W.; Chin, K.Y.; Remy, C.D. Contraction Sensing with Smart Braid McKibben Muscles. IEEE/ASME Trans. Mechatron. 2016, 21, 1201–1209. [Google Scholar] [CrossRef] [PubMed]
- Legrand, J.; Loenders, B.; Vos, A.; Schoevaerdts, L.; Poorten, E.V. Integrated Capacitance Sensing for Miniature Artificial Muscle Actuators. IEEE Sens. J. 2020, 20, 1363–1372. [Google Scholar] [CrossRef]
- Yano, T.; Fujimoto, S.; Akagi, T.; Kobayashi, W. Development of Outer Diameter Sensor for Position Control of McKibben Artificial Actuator Using Hall-Effect Sensor. Int. J. Mech. Eng. Robot. Res. 2020, 9, 190–196. [Google Scholar] [CrossRef]
- Tiziani, L.O.; Hammond, F.L. Optical Sensor-Embedded Pneumatic Artificial Muscle for Position and Force Estimation. Soft Robot. 2020, 7, 462–477. [Google Scholar] [CrossRef] [PubMed]
- Akagi, T.; Dohta, S.; Kenmotsu, Y.; Zhao, F.; Yoneda, M. Development of Smart Inner Diameter Sensor for Position Control of Mckibben Artificial Muscle. Procedia Eng. 2012, 41, 105–112. [Google Scholar] [CrossRef][Green Version]
- Shimooka, S.; Dohta, S.; Akagi, T.; Moriwake, Y. Position Control of Rubber Artificial Muscle Using Built-in Ultrasonic Sensor and Quasi-Servo Valve. Int. J. Mech. Eng. Robot. Res. 2015, 4, 304–308. [Google Scholar] [CrossRef]
- Schulte, H.F. The Characteristics of the McKibben Artificial Muscle. In The Application of External Power in Prosthetics and Orthotics; National Academy of Sciences; National Research Council: Washington, DC, USA, 1961; pp. 94–115. [Google Scholar]
- Nakamura, T. Illustration Artificial Muscles—The World Opened Up by Soft Actuators, 1st ed.; The Nikkan Kogyo Shimbun: Tokyo, Japan, 2011; pp. 56–61. (In Japanese) [Google Scholar]
- Tian, W.; Wakimoto, S.; Nagaoka, K.; Yoshimoto, Y.; Kanda, T.; Yamaguchi, D. Displacement Sensing of an Active String Actuator by an Optical Fiber. Eng. Proc. 2021, 10, 35. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, W.; Wakimoto, S.; Kanda, T.; Yamaguchi, D. Displacement Sensing of an Active String Actuator Using a Step-Index Multimode Optical Fiber Sensor. Sensors 2022, 22, 3232. https://doi.org/10.3390/s22093232
Tian W, Wakimoto S, Kanda T, Yamaguchi D. Displacement Sensing of an Active String Actuator Using a Step-Index Multimode Optical Fiber Sensor. Sensors. 2022; 22(9):3232. https://doi.org/10.3390/s22093232
Chicago/Turabian StyleTian, Weihang, Shuichi Wakimoto, Takefumi Kanda, and Daisuke Yamaguchi. 2022. "Displacement Sensing of an Active String Actuator Using a Step-Index Multimode Optical Fiber Sensor" Sensors 22, no. 9: 3232. https://doi.org/10.3390/s22093232
APA StyleTian, W., Wakimoto, S., Kanda, T., & Yamaguchi, D. (2022). Displacement Sensing of an Active String Actuator Using a Step-Index Multimode Optical Fiber Sensor. Sensors, 22(9), 3232. https://doi.org/10.3390/s22093232