
Study of Generalized Phase Spectrum Time Delay Estimation Method for Source Positioning in Small Room Acoustic Environment

 ,
,
Abstract
1. Introduction
2. Materials and Methods
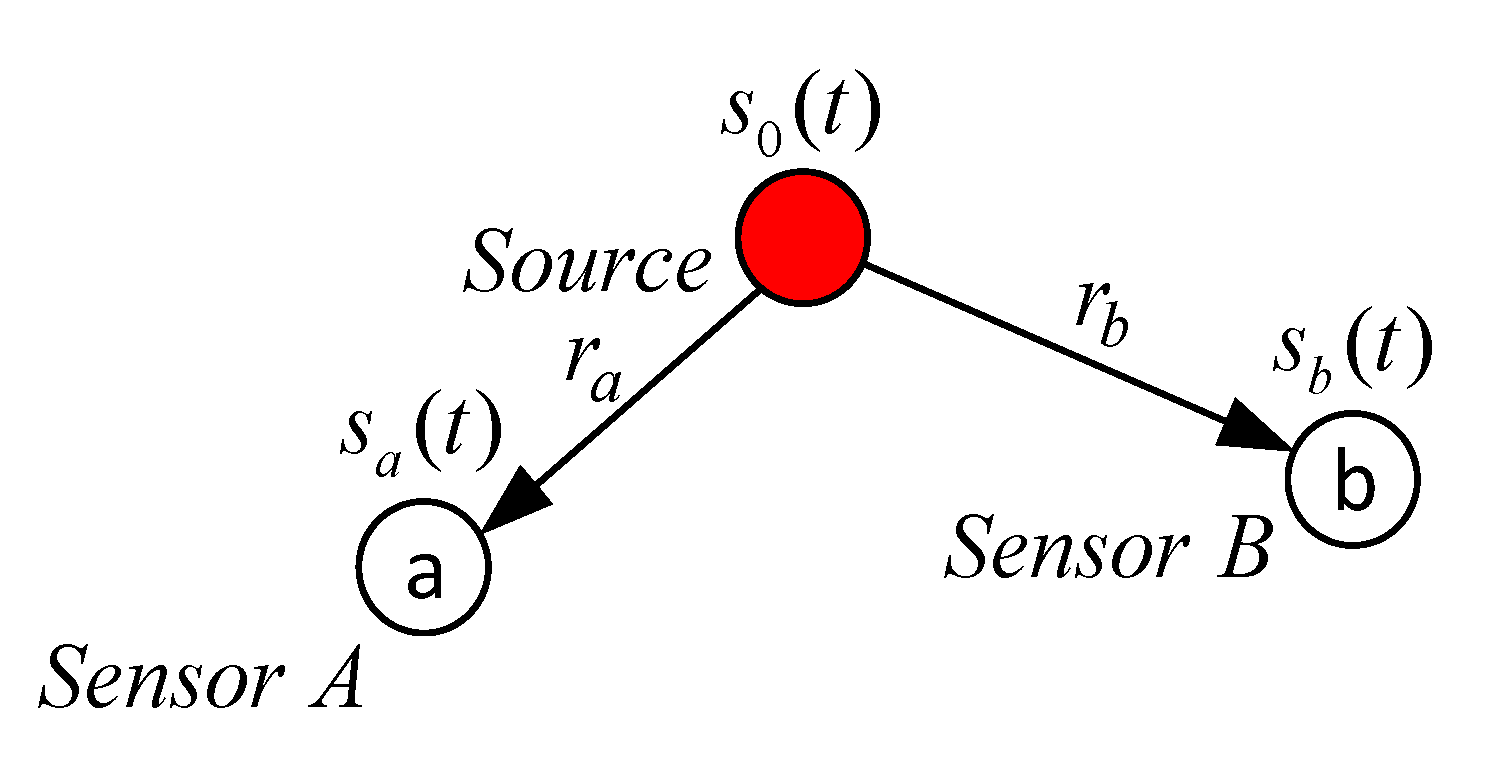
2.1. Ideal Propagation Model
2.2. Reverberation Model
2.3. Basic Phase Shift TDE
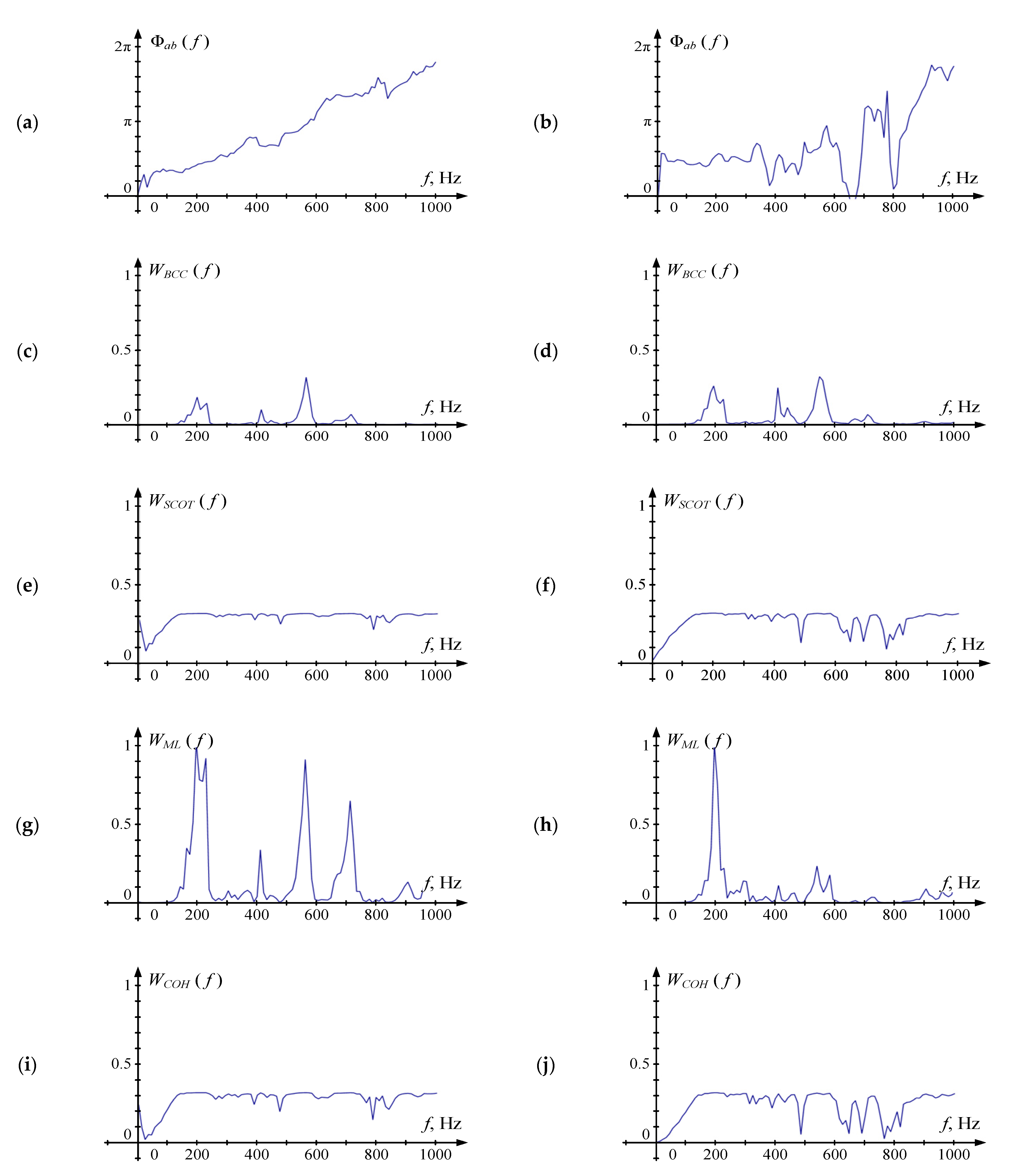
2.4. Generalized Phase Spectrum TDE
3. Results and Discussion
3.1. Experimental Setting
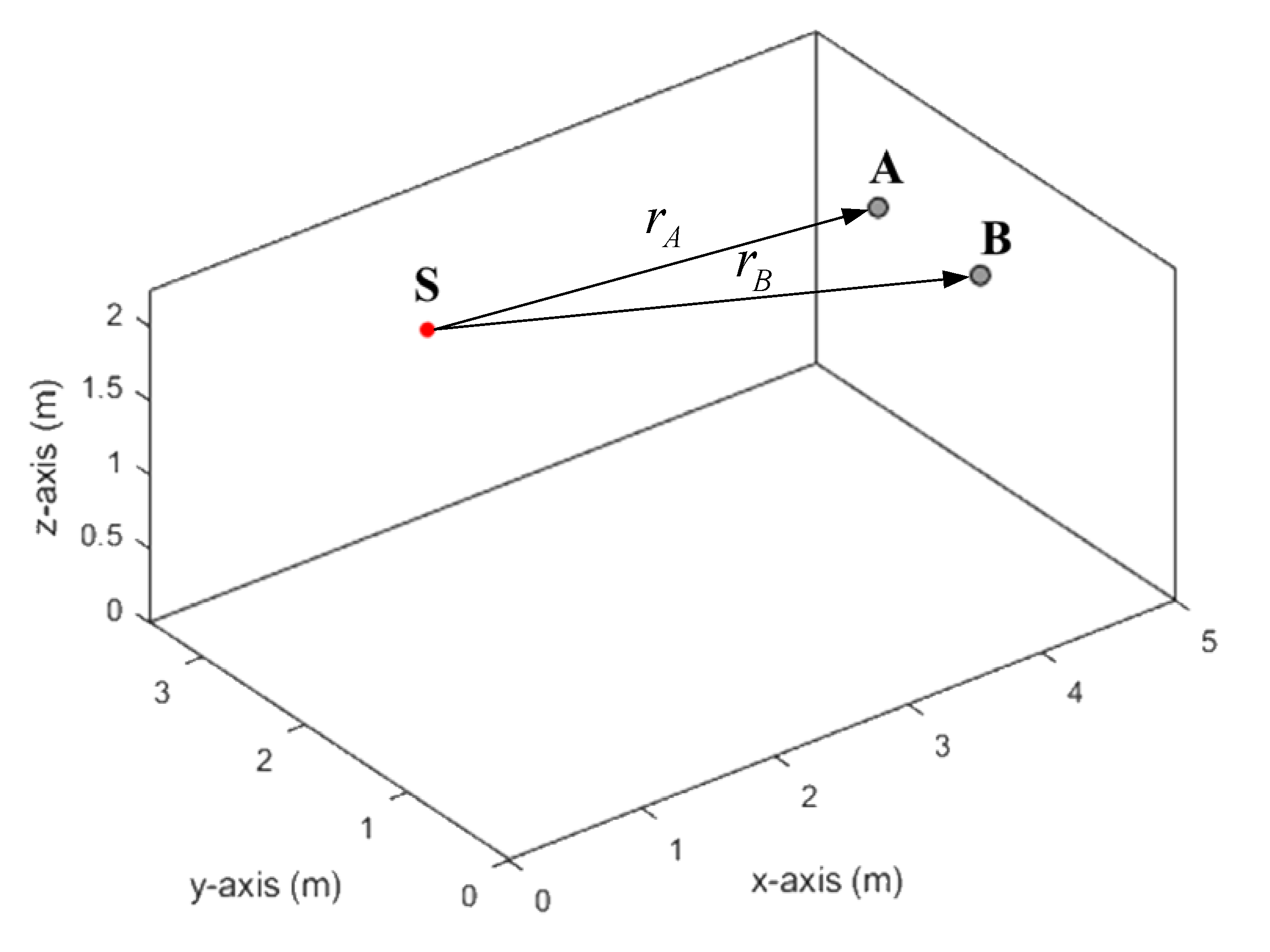
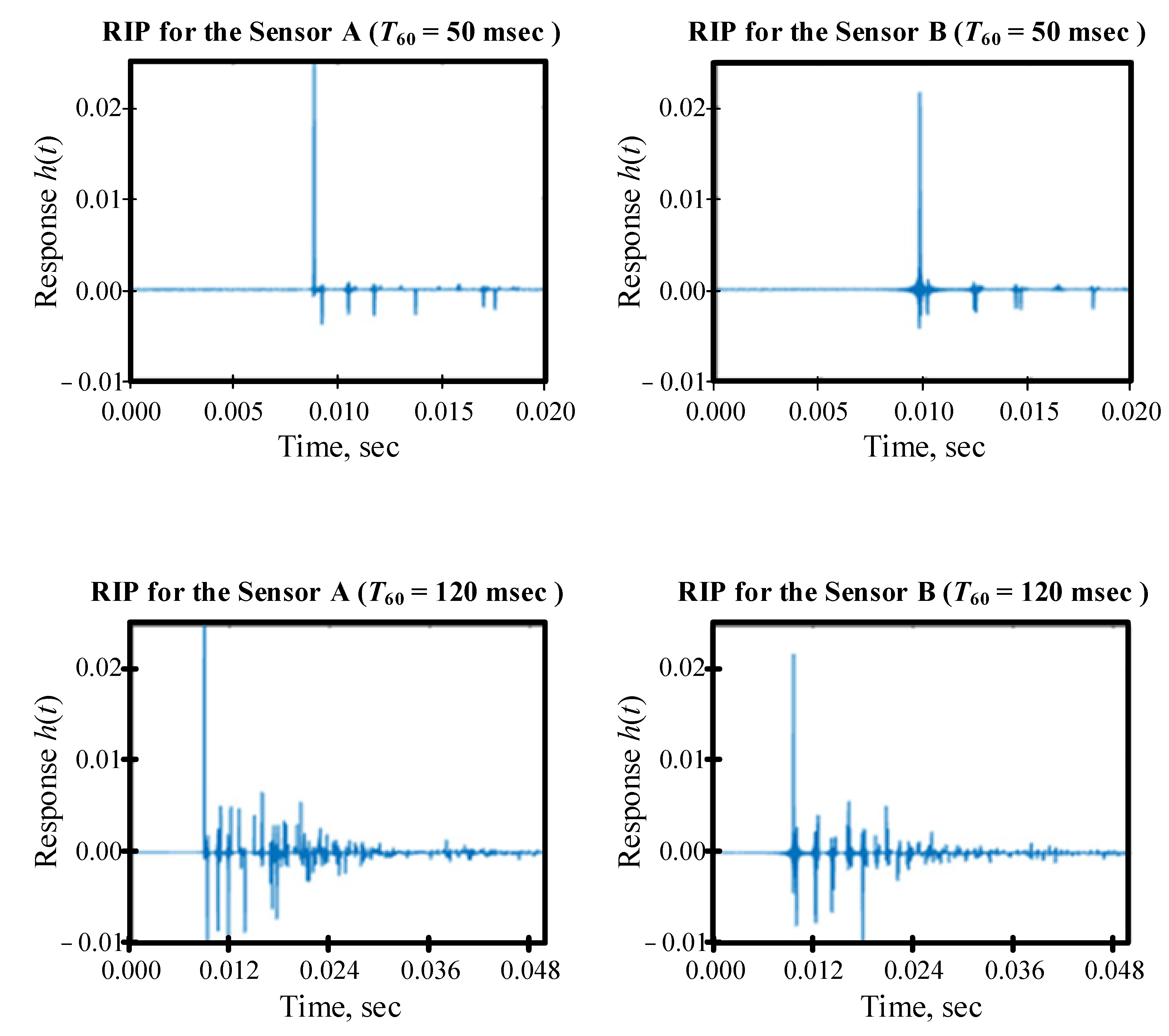
3.2. Simulation of the Small Room Environment
3.3. Comparison of GPS TDE Methods in Anechoic Environment
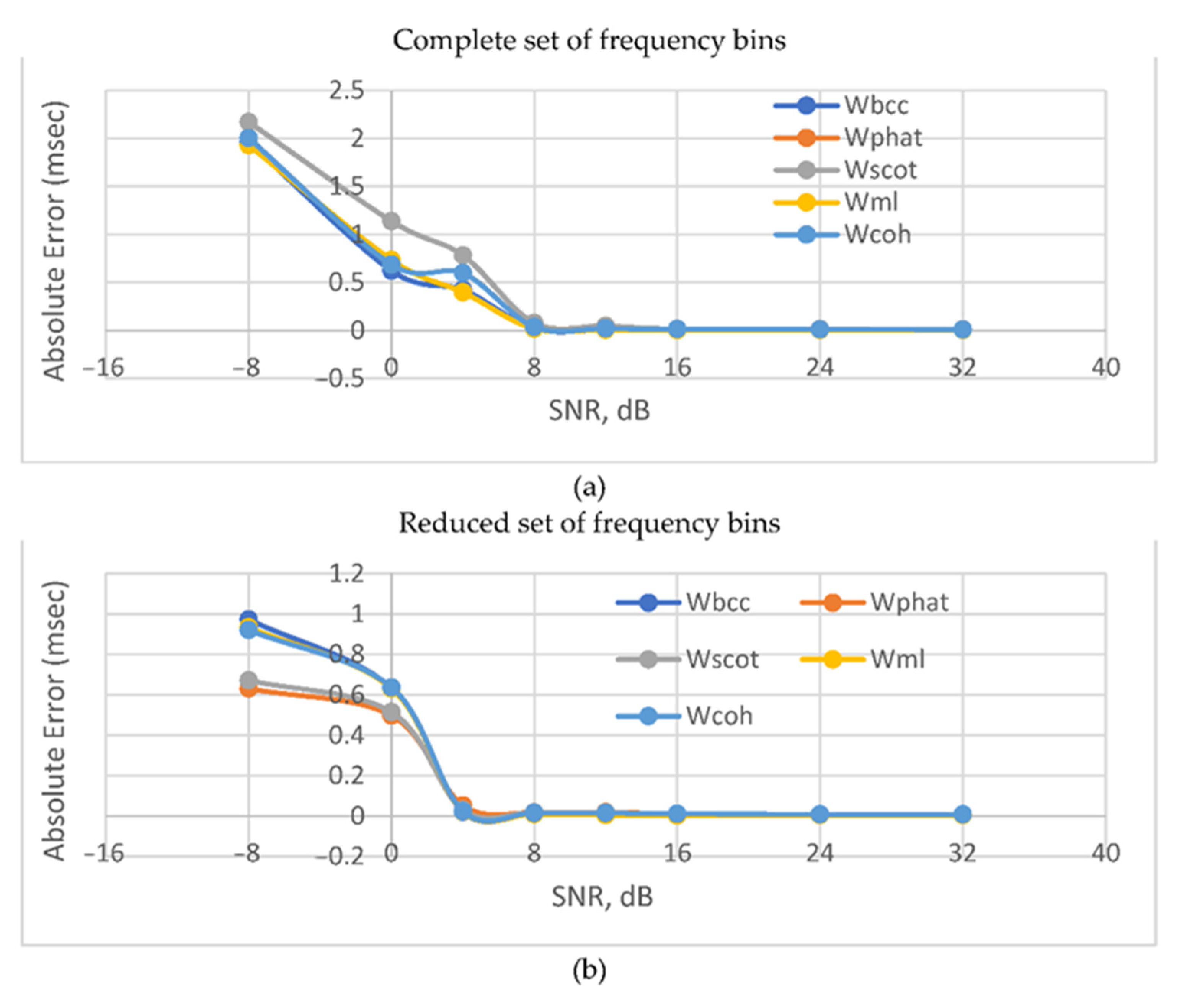
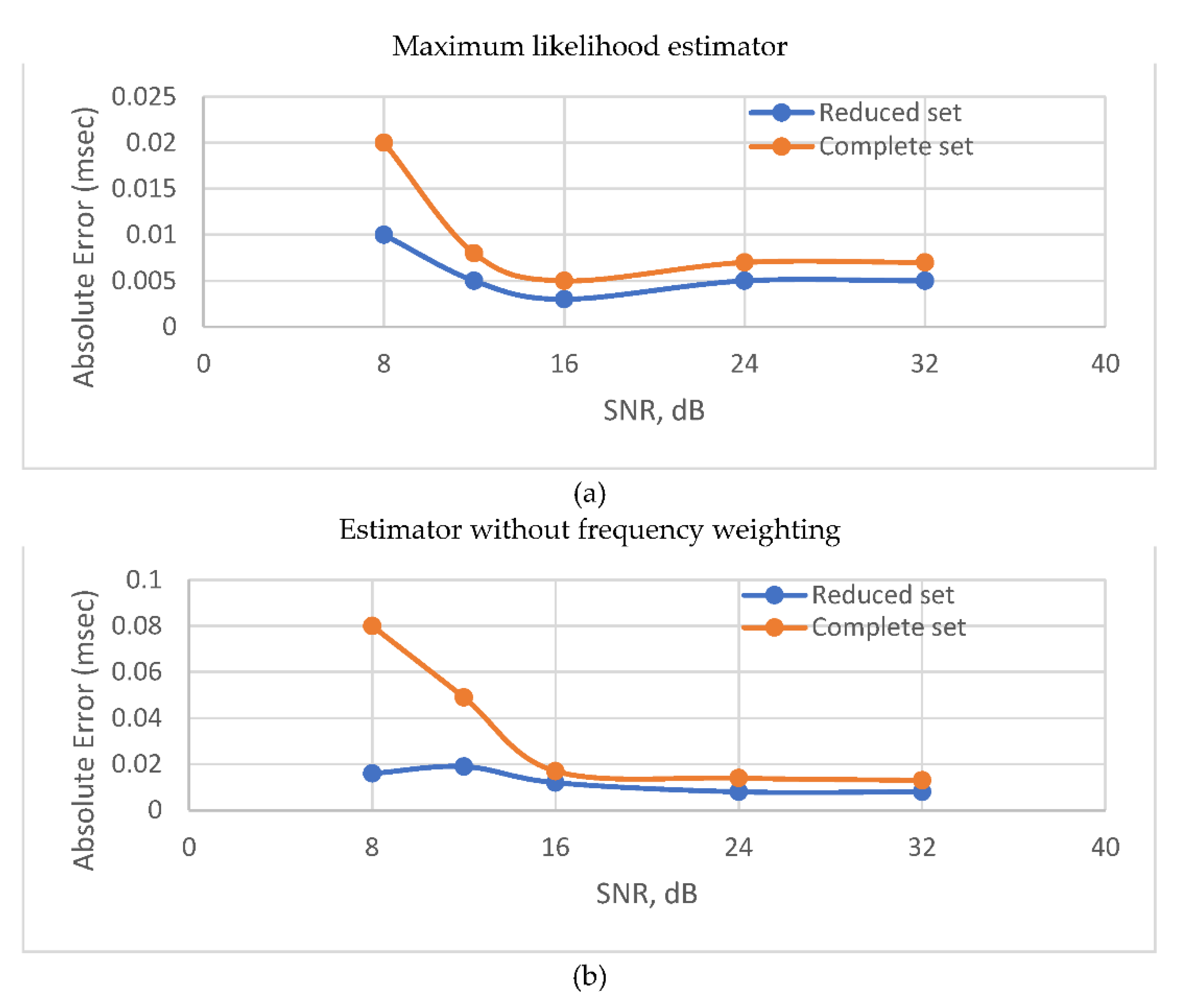
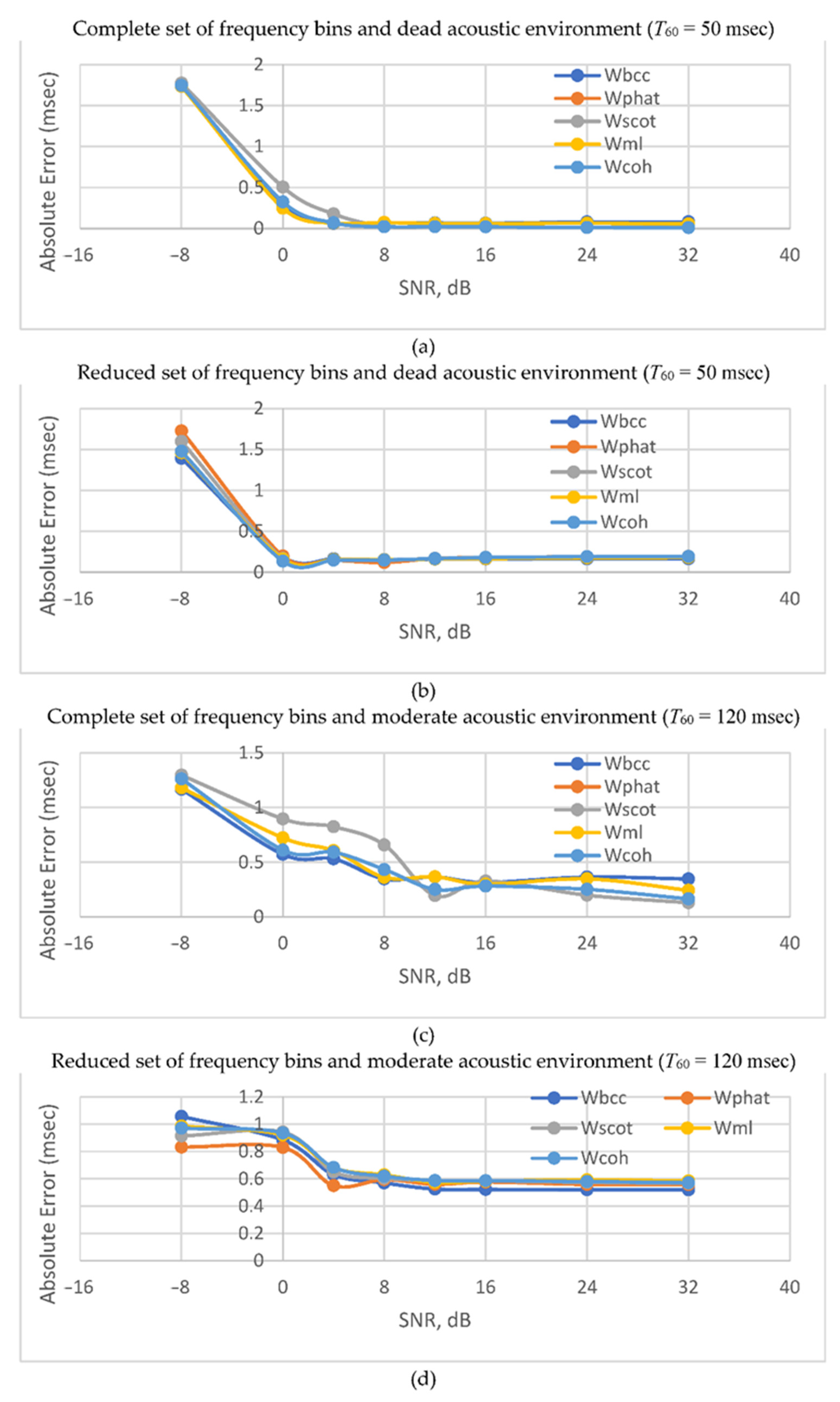
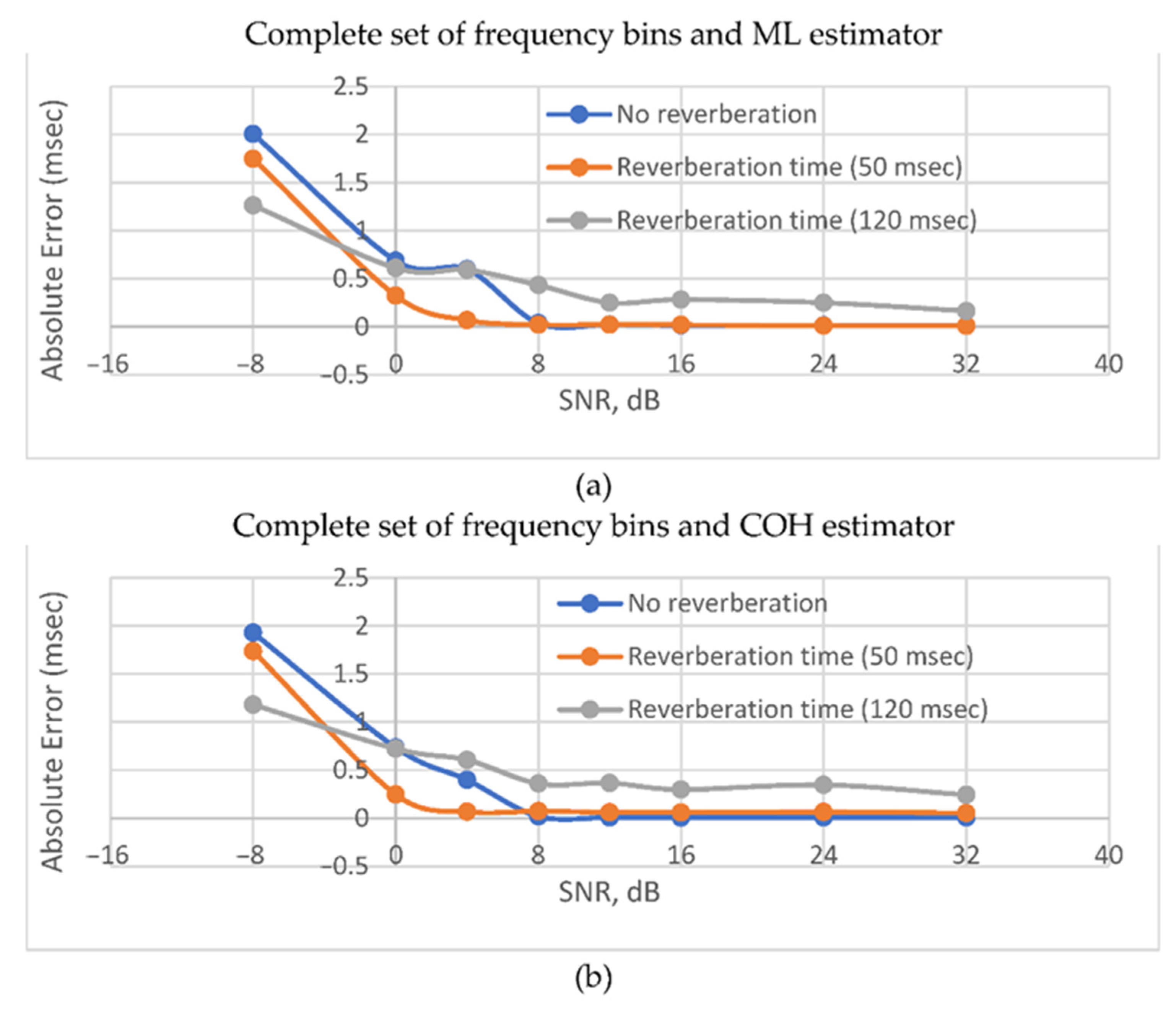
3.4. Comparison of GPS TDE Methods in Reverberant Environment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Juang, B.H.; Chen, T. Highlights of Statistical Signal and Array Processing. IEEE Signal Proc. Mag. 1998, 15, 21–64. [Google Scholar] [CrossRef]
- Fuchs, H.V.; Riehle, R. Ten Years of Experience with Leak Detection by Acoustic Signal Analysis. Appl. Acoust. 1991, 33, 1–19. [Google Scholar] [CrossRef]
- Kousiopoulos, G.-P.; Papastavrou, G.-N.; Kampelopoulos, D.; Karagiorgos, N.; Nikolaidis, S. Comparison of Time Delay Estimation Methods Used for Fast Pipeline Leak Localization in High-Noise Environment. Technologies 2020, 8, 27. [Google Scholar] [CrossRef]
- Zu, X.; Guo, F.; Huang, J.; Zhao, Q.; Liu, H.; Li, B.; Yuan, X. Design of an Acoustic Target Intrusion Detection System Based on Small-Aperture Microphone Array. Sensors 2017, 17, 514. [Google Scholar] [CrossRef] [PubMed]
- Ren, E.; Ornelas, G.C.; Loeliger, H.-A. Real-Time Interaural Time Delay Estimation Via Onset Detection. In Proceedings of the 2021 IEEE International Conference on Acoustics, Speech and Signal Processing, ICASSP 2021, Toronto, ON, Canada, 6–11 June 2021; pp. 1988–2005. [Google Scholar] [CrossRef]
- Carter, C. Time Delay Estimation for Passive Sonar Signal Processing. IEEE Trans. Acoust. Speech 1981, 29, 463–470. [Google Scholar] [CrossRef]
- Dvorkind, T.G.; Gannot, S. Time Difference of Arrival Estimation of Speech Source in a Noisy and Reverberant Environment. Signal Process. 2005, 85, 177–204. [Google Scholar] [CrossRef]
- Chen, J.; Benesty, J.; Huang, A. Time Delay Estimation in Room Acoustic Environments: An Overview. EURASIP J. Adv. Signal Process. 2006, 26503, 1–19. [Google Scholar] [CrossRef]
- Potortì, F.; Palumbo, F.; Crivello, A. Sensors and Sensing Technologies for Indoor Positioning and Indoor Navigation. Sensors 2020, 20, 5924. [Google Scholar] [CrossRef]
- Narayana Murthy, B.H.; Yegnanarayana, B.; Radiri, S.R. Time Delay Estimation from Mixed Multispeaker Speech Signals Using Single Frequency Filtering. Int. J. Circuits Syst. Signal Process. 2020, 39, 1988–2005. [Google Scholar] [CrossRef]
- Trifa, V.M.; Koene, A.; Moren, J.; Cheng, G. Real-Time Acoustic Source Localization in Noisy Environments for Human-Robot Multimodal Interaction. In Proceedings of the 16th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2007, Jeju, Korea, 26–29 August 2007; pp. 1988–2005. [Google Scholar] [CrossRef]
- Althoubi, A.; Alshahrani, R.; Peyravi, H. Delay Analysis in IoT Sensor Networks. Sensors 2021, 21, 3876. [Google Scholar] [CrossRef]
- Faerman, V.A.; Avramchuk, V.S. Comparative Study of Basic Time Domain Time-Delay Estimators for Locating Leaks in Pipelines. Int. J. Netw. Distrib. Comput. 2020, 8, 49–57. [Google Scholar] [CrossRef]
- Brennan, M.J.; Gao, Y.; Josephn, P.F. On the Relationship between Time and Frequency Domain Methods in Time Delay Estimation for Leak Detection in Water Distribution Pipes. J. Sound Vib. 2007, 304, 213–223. [Google Scholar] [CrossRef]
- Zhen, Z.; Zi-qiang, H. The Generalized Phase Spectrum Method for Time Delay Estimation. In Proceedings of the IEEE International Conference on Conference: Acoustics, Speech, and Signal Processing ICASSP ′84, San Diego, CA, USA, 19–21 March 1984; pp. 459–462. [Google Scholar] [CrossRef]
- Piersol, A.G. Time Delay Estimation Using Phase Data. IEEE Trans. Acoust. Speech 1981, 29, 471–477. [Google Scholar] [CrossRef]
- Mannay, K.; Ureña, J.; Hernández, Á.; Villadangos, J.M.; Machhout, M.; Aguili, T. Evaluation of Multi-Sensor Fusion Methods for Ultrasonic Indoor Positioning. Appl. Sci. 2021, 11, 6805. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Orcioni, S. Robust Room Impulse Response Measurement Using Perfect Periodic Sequences for Wiener Nonlinear Filters. Electronics 2020, 9, 1793. [Google Scholar] [CrossRef]
- Allen, J.B.; Berkley, D.A. Image Method for Efficiently Simulating Small-Room Acoustics. J. Acoust. Soc. Am. 1979, 65, 943–950. [Google Scholar] [CrossRef]
- Liu, J.; Yang, G.-Z. Robust Speech Recognition in Reverberant Environments by Using an Optimal Synthetic Room Impulse Response Model. Speech Commun. 2015, 67, 65–77. [Google Scholar] [CrossRef]
- Alpkocak, A.; Sis, M.K. Computing Impulse Response of Room Acoustic Using the Ray-Tracing Method in Time Domain. Arch. Acoust. 2010, 35, 505–519. [Google Scholar] [CrossRef][Green Version]
- Lehmann, E.; Johansson, A.; Nordholm, S. Reverberation-Time Prediction Method for Room Impulse Responses Simulated with the Image-Source Model. In Proceedings of the IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA’07), New Paltz, NY, USA, 21–24 October 2007; pp. 159–162. [Google Scholar] [CrossRef]
- Lehmann, E.; Johansson, A. Prediction of Energy Decay in Room Impulse Responses Simulated with an Image-Source Model. J. Acoust. Soc. Am. 2008, 124, 269–277. [Google Scholar] [CrossRef]
- Detmold, W.; Kanwar, G.; Wagman, L. Phase Unwrapping and One-Dimensional Sign Problems. Phys. Rev. D 2018, 98, 074511. [Google Scholar] [CrossRef]
- Bedard, S.; Champagne, B.; Stephenne, A. Effects of Room Reverberation on Time-Delay Estimation Performance. In Proceedings of the ICASSP ′94 IEEE International Conference on Acoustics, Speech and Signal Processing, Adelaide, Australia, 19–22 April 1994; pp. 261–264. [Google Scholar] [CrossRef]
- Levy, S.M. Construction Calculations Manual, 1st ed.; Butterworth-Heinemann: Oxford, UK, 2012; pp. 503–544. [Google Scholar]
- Sysel, P.; Rajmic, P. Goertzel Algorithm Generalized to Non-Integer Multiples of Fundamental Frequency. EURASIP J. Adv. Signal Process. 2012, 56, 1–8. [Google Scholar] [CrossRef]
- Yeh, C.-Y.; Hwang, S.-H. Efficient Detection Approach for DTMF Signal Detection. Appl. Sci. 2019, 9, 422. [Google Scholar] [CrossRef]
- HPC-Cluster «Akademik V.M. Matrosov» Official Webpage. Available online: https://hpc.icc.ru/en/hardware/ (accessed on 18 November 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Nomenclature | Formula |
|---|---|---|
| BCC | WBCC (fk) | |Sab (fk)|/max(|Sab (fk)|) |
| PHAT | WPHAT (fk) | 1 |
| SCOT | WSCOT (fk) | γab (fk) |
| ML | WML (fk) | γ2ab (fk)/[1 − γ2ab (fk)] |
| COH | WCOH (fk) | γ2ab (fk) |
| Set | SNR | Mean Absolute Error (msec) | ||||
|---|---|---|---|---|---|---|
| (dB) | WBCC (fk) | WPHAT (fk) | WSCOT (fk) | WML (fk) | WCOH (fk) | |
| First | 32 | 0.008 | 0.013 | 0.012 | 0.007 | 0.011 |
| 24 | 0.007 | 0.014 | 0.016 | 0.007 | 0.013 | |
| 16 | 0.005 | 0.017 | 0.020 | 0.005 | 0.016 | |
| 12 | 0.008 | 0.049 | 0.031 | 0.008 | 0.023 | |
| 8 | 0.020 | 0.080 | 0.053 | 0.020 | 0.038 | |
| 4 | 0.425 | 0.782 | 0.626 | 0.399 | 0.600 | |
| 0 | 0.623 | 1.139 | 0.893 | 0.735 | 0.687 | |
| −8 | 1.961 | 2.171 | 2.100 | 1.931 | 2.006 | |
| Second | 32 | 0.005 | 0.008 | 0.009 | 0.005 | 0.009 |
| 24 | 0.005 | 0.008 | 0.009 | 0.005 | 0.009 | |
| 16 | 0.004 | 0.012 | 0.011 | 0.003 | 0.012 | |
| 12 | 0.008 | 0.019 | 0.017 | 0.005 | 0.015 | |
| 8 | 0.011 | 0.016 | 0.018 | 0.010 | 0.015 | |
| 4 | 0.020 | 0.053 | 0.030 | 0.022 | 0.024 | |
| 0 | 0.634 | 0.497 | 0.514 | 0.631 | 0.637 | |
| −8 | 0.973 | 0.631 | 0.672 | 0.934 | 0.921 | |
| Set | SNR | Mean Absolute Error (msec) | ||||
|---|---|---|---|---|---|---|
| (dB) | WBCC (fk) | WPHAT (fk) | WSCOT (fk) | WML (fk) | WCOH (fk) | |
| First | 32 | 0.081 | 0.012 | 0.009 | 0.054 | 0.009 |
| 24 | 0.080 | 0.014 | 0.010 | 0.065 | 0.012 | |
| 16 | 0.063 | 0.019 | 0.017 | 0.059 | 0.019 | |
| 12 | 0.066 | 0.021 | 0.015 | 0.061 | 0.021 | |
| 8 | 0.072 | 0.027 | 0.017 | 0.073 | 0.022 | |
| 4 | 0.062 | 0.177 | 0.097 | 0.067 | 0.069 | |
| 0 | 0.272 | 0.505 | 0.407 | 0.247 | 0.324 | |
| −8 | 1.735 | 1.775 | 1.746 | 1.736 | 1.747 | |
| Second | 32 | 0.166 | 0.195 | 0.195 | 0.182 | 0.194 |
| 24 | 0.165 | 0.190 | 0.192 | 0.178 | 0.192 | |
| 16 | 0.163 | 0.181 | 0.183 | 0.169 | 0.181 | |
| 12 | 0.161 | 0.171 | 0.171 | 0.163 | 0.168 | |
| 8 | 0.155 | 0.122 | 0.148 | 0.153 | 0.150 | |
| 4 | 0.165 | 0.151 | 0.156 | 0.157 | 0.150 | |
| 0 | 0.190 | 0.199 | 0.168 | 0.162 | 0.137 | |
| −8 | 1.392 | 1.727 | 1.598 | 1.460 | 1.478 | |
| Set | SNR | Mean Absolute Error (msec) | ||||
|---|---|---|---|---|---|---|
| (dB) | WBCC (fk) | WPHAT (fk) | WSCOT (fk) | WML (fk) | WCOH (fk) | |
| First | 32 | 0.346 | 0.129 | 0.146 | 0.243 | 0.164 |
| 24 | 0.364 | 0.198 | 0.208 | 0.347 | 0.251 | |
| 16 | 0.315 | 0.327 | 0.320 | 0.299 | 0.282 | |
| 12 | 0.365 | 0.194 | 0.212 | 0.366 | 0.251 | |
| 8 | 0.348 | 0.658 | 0.578 | 0.361 | 0.433 | |
| 4 | 0.531 | 0.825 | 0.768 | 0.606 | 0.592 | |
| 0 | 0.572 | 0.897 | 0.842 | 0.723 | 0.611 | |
| −8 | 1.169 | 1.297 | 1.291 | 1.181 | 1.263 | |
| Second | 32 | 0.519 | 0.558 | 0.567 | 0.584 | 0.571 |
| 24 | 0.520 | 0.559 | 0.574 | 0.592 | 0.580 | |
| 16 | 0.522 | 0.577 | 0.586 | 0.583 | 0.586 | |
| 12 | 0.525 | 0.560 | 0.586 | 0.574 | 0.587 | |
| 8 | 0.570 | 0.594 | 0.604 | 0.629 | 0.619 | |
| 4 | 0.631 | 0.550 | 0.651 | 0.682 | 0.683 | |
| 0 | 0.884 | 0.829 | 0.942 | 0.921 | 0.935 | |
| −8 | 1.057 | 0.832 | 0.914 | 0.985 | 0.971 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faerman, V.; Avramchuk, V.; Voevodin, K.; Sidorov, I.; Kostyuchenko, E. Study of Generalized Phase Spectrum Time Delay Estimation Method for Source Positioning in Small Room Acoustic Environment. Sensors 2022, 22, 965. https://doi.org/10.3390/s22030965
Faerman V, Avramchuk V, Voevodin K, Sidorov I, Kostyuchenko E. Study of Generalized Phase Spectrum Time Delay Estimation Method for Source Positioning in Small Room Acoustic Environment. Sensors. 2022; 22(3):965. https://doi.org/10.3390/s22030965
Chicago/Turabian StyleFaerman, Vladimir, Valeriy Avramchuk, Kirill Voevodin, Ivan Sidorov, and Evgeny Kostyuchenko. 2022. "Study of Generalized Phase Spectrum Time Delay Estimation Method for Source Positioning in Small Room Acoustic Environment" Sensors 22, no. 3: 965. https://doi.org/10.3390/s22030965
APA StyleFaerman, V., Avramchuk, V., Voevodin, K., Sidorov, I., & Kostyuchenko, E. (2022). Study of Generalized Phase Spectrum Time Delay Estimation Method for Source Positioning in Small Room Acoustic Environment. Sensors, 22(3), 965. https://doi.org/10.3390/s22030965