Abstract
Controlling the manipulator is a big challenge due to its hysteresis, deadzone, saturation, and the disturbances of actuators. This study proposes a hybrid state/disturbance observer-based multiple-constraint control mechanism to address this difficulty. It first proposes a hybrid state/disturbance observer to simultaneously estimate the unmeasurable states and external disturbances. Based on this, a barrier Lyapunov function is proposed and implemented to handle output saturation constraints, and a back-stepping control method is developed to provide sufficient control performance under multiple constraints. Furthermore, the stability of the proposed controller is analyzed and proved. Finally, simulations and experiments are carried out on a 2-DOF and 6-DOF robot, respectively. The results show that the proposed control method can effectively achieve the desired control performance. Compared with several commonly used control methods and intelligent control methods, the proposed method shows superiority. Experiments on a 6-DOF robot verify that the proposed method has good tracking performance for all joints and does not violate constraints.
1. Introduction
Robots have been widely used on many occasions and have worked in single-task environments and in complex tasks [1]. For example, the manipulator needs to not only grasp, carry, and stack, but also to cooperate with other machines to finish complex operations. This manipulator usually has strongly nonlinear features, such as hysteresis, input deadzone, output saturation, and a nonlinear load, as well as many unmeasurable physical states and disturbances, including friction, clearance, noise, etc. Ignoring these constraints may lead to an undesirable performance, such as a high steady-state error, poor transient response, and large overshoot [2]. In addition, a violation of constraints during operation may result in performance degradation, hazards, or system damage. Therefore, it is necessary to consider the input and output constraints of the robot system at the same time.
Many control methods have been designed for the input deadzone control, and most of this research is based on the deadzone function with assumed parameters. In general, the parameter of a deadzone function is difficult to obtain, which leads to common controllers is difficult to implement. There has been several studies conducted which aim to solve the problem of nonlinear systems with input deadzone [3]. For example, Wang et al. proposed a control method for a special nonlinear system with symmetrical deadzone [4] in which the parameters of deadzone function are unknown and the neural network is used to solve the deadzone effect. In paper [5], an adaptive neural network controller was proposed for single-master–multiple-slaves teleoperation with consideration to time delays and input deadzone uncertainties. Wu et al. [6] proposed a study on the observer-based controller for nonlinear systems with unmodeled dynamics and actuator deadzone. Tong et al. [7] employed neural networks to approximate the unknown nonlinear uncertainties. Hu et al. [8] presented an integrated direct/indirect adaptive robust control mehtod for a class of nonlinear systems, preceded by unknown nonsymmetric, nonequal slope deadzone nonlinearity. Sang et al. [9] presented a new adaptive iterative learning control approach with deadzone to address the problem of bounded noise. Wang et al. [10] proposed a nonlinear controller to overcome deadzone nonlinearities, which are unavoidable in many physical systems due to the imperfections of system components. The proposed control employs an ideal linear model of the system and a model controller to generate an ideal reference output. Although these methods have obtained many successful applications, they are basically designed for one or two kinds of nonlinearity and they do not consider controller design problems in the case of multiple nonlinear constraints. In addition, these methods require all physical states to be measurable and consider less external uncertainty, leading to poor control performance on many occasions.
To handle output saturation constraints, many techniques have been developed [11,12]. Yan et al. [13] introduced a nonlinear smooth function to tackle the saturation input nonlinearity, with a disturbance observer compensating for the unknown time-varying disturbances. In [14], an adaptive fuzzy output-feedback control was developed for a class of output-constrained and uncertain nonlinear systems with input saturation and unmeasured states using a log-type BLF and an auxiliary system incorporating the virtual control variable. Bu et al. [15] proposed a novel DDC algorithm, constructed using saturated output data, and output saturation causes the convergence rate of DDC systems to slow down. Xing et al. [16] proposed an observer-based adaptive control for uncertain nonlinear systems with input saturation and output constraints. Han et al. [17] proposed a dynamic parallel distributed compensator to design a dynamic output-feedback controller to ensure the finite time boundary and dissipate the singular uncertain time-varying-delay fuzzy systems, subject to actuator saturation and output constraints.
In recent years, the potential barrier Lyapunov function has attracted more and more attention and has become an effective tool for the control design of constrained nonlinear uncertain systems. The control law is derived directly from Lyapunov stability analysis. It has been successfully applied in the tracking control of a robotic manipulator [18] and in handling the full-state constraint control of a nonlinear system [19]. Thus, there are many types of BLF that have been proposed to cope with constraints, such as the log-type BLF [19], integral-type BLF [20], and tan-type barrier Lyapunov function (BLF) [19]. However, at the beginning of control, BLF-based controllers usually require specified time-varying constraints to achieve effective and stable control [18]. In addition, when the constraint variable is infinitely close to the predefined boundary, in order to meet the constraint conditions, the output of the BLF-based controller tends to be infinite, which leads to the paradox of output saturation. Therefore, in order to deal with constraints, BLF-based controllers should meet feasibility conditions [21], that is, the constraint variables should always be kept within the predefined boundaries. Parameters should also be designed appropriately because if the constraint is too small, it may be impractical. A lot of research has been conducted in [21,22] to eliminate strict feasibility conditions. In these works, the time derivative of the universal barrier function is regarded as an auxiliary system, and then incorporated into the control system [23].
On the basis of previous research, an adaptive output-feedback control method for manipulator systems with multiple constraints has been developed. A hybrid-state observer has been designed to estimate unmeasured states and disturbances in order to overcome the output constraint and input deadzone. An adaptive controller has been developed by combining back-stepping and BLF technology. It was proved that the proposed control method can ensure that all signals in the closed-loop system are bounded, simultaneously avoiding input and output constraints. The main contributions of the proposed control scheme are as follows: (i) the input deadzone and output constraints are solved using a BLF and auxiliary observer, respectively; (ii) the unmeasured state and disturbance are estimated by designing a hybrid state observer; and (iii) the designed system has a closed loop and stability.
2. Problem Description
The dynamic of a robot can be described as follows,
where is the vector of joint displacements, is the vector of joint torques supplied by the actuators, is the inertia matrix, is the Coriolis and centrifugal matrix, and is the gravitational force. is the uncertainty, including unmodeled dynamics and external disturbances. The inertia matrix is symmetric and positive definite, and the matrix is skew-symmetric.
Considering parameter uncertainty, we define the accurate dynamic parameters are
where , and are the nominal parameter of the manipulator, and , , and are the parameter uncertainty. The total unknown disturbance is defined as
Usually, the disturbance d is bounded and continuous and satisfies , where is the positive constant.
Then, the model of the manipulator can be rewritten as:
Letting , , , the model (4) may be rewritten as:
Letting the desirable trajectory be , the actual output trajectory is
All the signals are bounded and we have , where is a positive constant vector. In this model, the position of the manipulator can be measured, but the joint speed and acceleration cannot be measured directly. To achieve accurate control of this manipulator, it is necessary to estimate these unknown states.
For the manipulator, the actual inputs and outputs have various types of nonlinear constraints, such as output saturation, input deadzone, and hysteresis. is the torque vector of the motor, and its output saturation may be represented as [24]:
where and are the maximum and minimum of the input signals, respectively, and and are the nonlinear smooth continuous functions.
The input deadzone of the joint actuator may be represented as [25]:
where is the input, and are the boundaries, and and are the deadzone function.
The hysteresis nonlinearity may be represented as [26]:
here
Obviously, this manipulator exists with unknown dynamics and an external disturbance. Moreover, some states cannot be measured directly, and many nonlinear constraints exist. Collecting all of this together, it is difficult to achieve accurate control of this manipulator.
3. Design of Controller
In order to achieve accurate control of the manipulator with multiple constraints, disturbances, and some unmeasurable states, a hybrid state/disturbance observer-based multiple-constraint control method is developed here. A hybrid state/disturbance observer is proposed to simultaneously estimate unmeasurable states and external disturbances. On this basis, a multiple-constraint control strategy is developed to achieve satisfactory control performance under multiple constraints. Moreover, the stability of the developed controller is analyzed and proved.
3.1. Hybrid State/Disturbance Observer
For the manipulator system (5), only the output state can be measured, while the other state cannot be measured directly. To obtain the states and unknown disturbance of the manipulator system, a hybrid state/disturbance observer system is designed as follows:
where is the estimation of and is the estimation of disturbance .
- (a)
- Solving the hybrid observer
In order to find the solution of this hybrid observer, a two-step solving algorithm is developed: (1) robustly estimate the states under the given disturbance, roughly estimated according to expert experience or experiment; and (2) estimate the disturbance under the given states.
Usually, the initial disturbance can be roughly estimated according to expert experience or experiment, set as .
Moreover, the disturbance is often bounded and has , in which is the estimation error of the disturbance .
When the parameters and the symmetric and positive definite matrices and are properly chosen, the following inequality can be satisfied:
According to (3), and the following inequality will be held in finite time,
According to the inequality (13), in the presence of a bounded noise, the state error of the system is bounded.
In order to accurately estimate the disturbance, the following linear disturbance model [27] is used,
where denotes the derivatives of and . The matrices , , and have the following forms.
Combining (5) and (14), an extended system is obtained as,
where . An auxiliary variable is introduced as follows:
where is a polynomial vector, which is designed as shown in [25].
By differentiating Equation (17), and with consideration of Equations (10), (15) and (17), one has
From (18) and (14), the disturbance observer is designed as
where .
According to (19), it is easy to obtain the disturbance. Obviously, when the initial estimation of the disturbance is accurate, using (12) and (13), it is easy to obtain the states, upon which it can effectively estimate the disturbance using (19). When the initial estimation of the disturbance is inaccurate, it uses an iterative process to obtain the states and disturbance:
Step (1): first, robustly estimate the states under the initial disturbance, which is roughly estimated according to expert experience or experiment;
Step (2): then, estimate the disturbance under the given states;
Step (3): use the estimated disturbance to replace the initial disturbance and repeat step (1), (2), and (3) until the satisfactory states and the disturbance is obtained.
- (b)
- Performance analysis of the hybrid observer
The estimation errors are defined as
According to Equation (20), the disturbance error may be represented as
From (21), one has
According to (10), (11), (13), and (22), the error system of the hybrid observer is the following,
where , .
From (11) and (23), one has
Theorem 1.
Using the designed hybrid observer (11) and the three-step solving algorithm, the state estimation errorand the disturbance estimation errorconverge to the expected value in finite time, which ensures thatandare bounded, guaranteeingwill not escape to infinity before the finite time convergence of the hybrid observer error. As such, it can effectively estimate the states and disturbance.
Proof.
See Appendix A. □
3.2. Design of Feedback Controller
In order to achieve the well-tracking performance of the manipulator under multiple constraints, a multiple-constraint control strategy with consideration of the integrated barrier Lyapunov function method and the back-stepping algorithm is developed here, as shown in Figure 1. The tracking error is defined as , where is the actual trajectory and is the desired trajectory. The back-stepping algorithm defines
where denotes the virtual control variable.
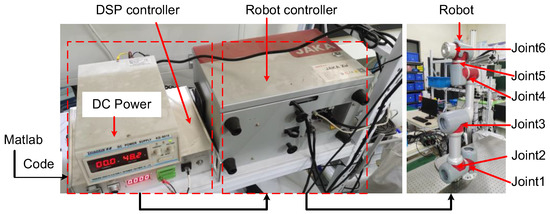
Figure 1.
Robot experimental platform.
The derivative of (25) is
is a small positive constant, which satisfies
where .
The following two-step strategy is developed to design the controller.
Step 1: For the multi-link manipulator, construct the following Lyapunov function,
where is a modification value.
Differentiating (28) yields
here,
is well defined and bounded around the neighborhood of .
Using L’Hopital’s rule, one has
Design virtual control variable as follows,
where is the positive control gain.
Combining (29) with (30), one has
Step 2: Establish the second Lyapunov function as follows
Differentiating yields,
Substituting (5) and (25) into (35), we have
Substituting (32) and (34) into (35) and (36) is simplified as
In order to make , considering the hysteresis (9) and input saturation (7), the torque control law is designed as follows,
where is a positive gain matrix, and it must satisfy
where and denotes the maximum and minimum eigenvalue of .
Then, considering the input deadzone, and by combining the input constraint (8) and the control law (39), the final control law is designed as follows,
Therefore, the control law can deal with all constraints, including hysteresis, output saturation, and input deadzone.
Theorem 2.
Considering the manipulator system (5) with an unknown disturbance, input deadzone, and output saturation, and given feedback control laws (38) and (40), the closed-loop system is semi-globally stable.
Proof.
Substituting (38) into (37) yields
Define and substitute it into (41)
While
From (42) and (43), one has
Because
one has according to (44) and (45). This indicates that the system tends to be stable in a small spectrum. □
4. Case Studies and Experiment
In this section, we simulated the proposed algorithm and validated the proposed control algorithm on a robot platform consisting of a six-degree-of-freedom (DOF) robot (JAKA ZU-7s), DC power, and an embedded DSP control system, as depicted in Figure 1. We carried out the simulation and experiment on a 2-DOF and 6-DOF robot platform, respectively. The dynamic model of the 2-DOF robot and its parameters are shown in Equation (46) and Table 1. The parameters of the 6-DOF robot are shown in Table 2. The accurate dynamic model of the 6-DOF robot was obtained by parameter identification.

Table 1.
Parameters of 2-DOF robot.
Table 2.
D-H Parameters of 6-DOF JAKA robot.
For the 2-DOF manipulator, the inertia matrix , the Coriolis and centrifugal matrix , and the gravity matrix are as follows
The initial position is and . The unknown dynamics and external disturbance are defined as follows:
- (1)
- Unknown unmodeled dynamics
- (2)
- Unknown external disturbance term
Thus, the total disturbance is shown below,
The input dead time and the output saturation are described as follows: , , respectively, with
4.1. Control Performance
The desired trajectory and its velocity and acceleration are given as follows
Then, the proposed control method is used to control this manipulator with input nonlinearity, output saturation, and external disturbance states to track the reference trajectory.
The hybrid state/disturbance observer is the following,
where , , and . The initial disturbance is set as , and the parameters of the disturbance observer are decided as follows
The control gains are decided as and .
Using the designed observer, the estimated state , and its observation error are shown in Figure 2a–d, respectively. Figure 3 show the disturbance estimation and its estimation error, respectively. From these figures, the unmeasurable state value of each joint and the disturbance can be accurately estimated.
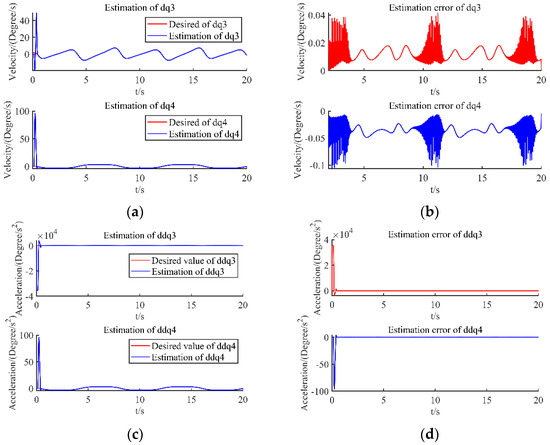
Figure 2.
(a) State estimation; (b) State estimation errors; (c) State estimation; (d) State estimation errors.
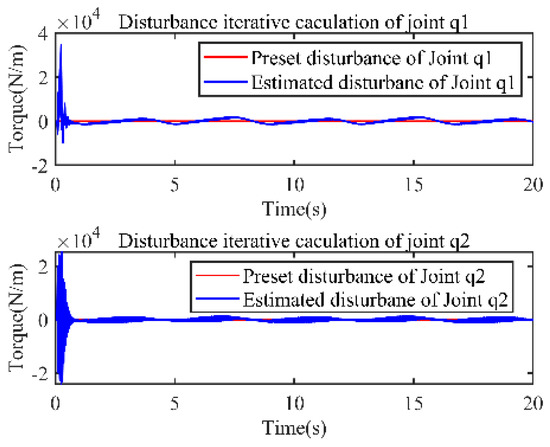
Figure 3.
Disturbance observation.
Using this designed controller, the control torque is shown in Figure 4, the desired trajectory and the practical trajectory are shown in Figure 5, and their difference is shown in Figure 6. From these figures, it can be seen that the control torque is smooth without a sudden change, it does not violate output constraints, and the proposed method can effectively achieve the tracking of this manipulator, even if there are input nonlinearity, output saturation, external disturbances, and unmeasurable states.
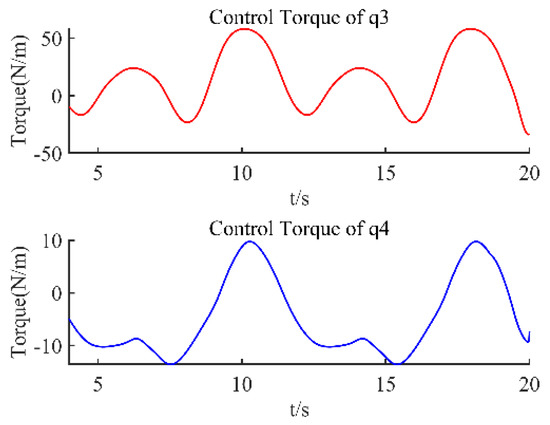
Figure 4.
Joint’s control torque.
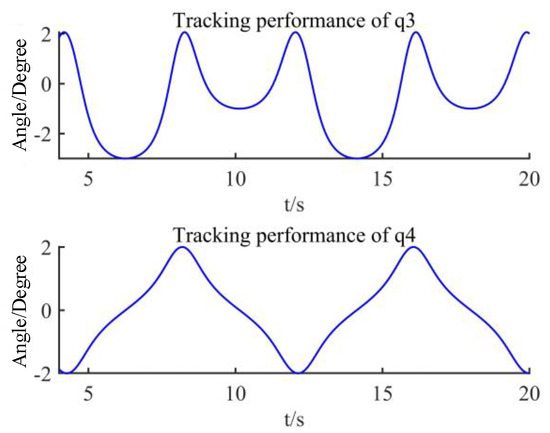
Figure 5.
Joint’s tracking performance.
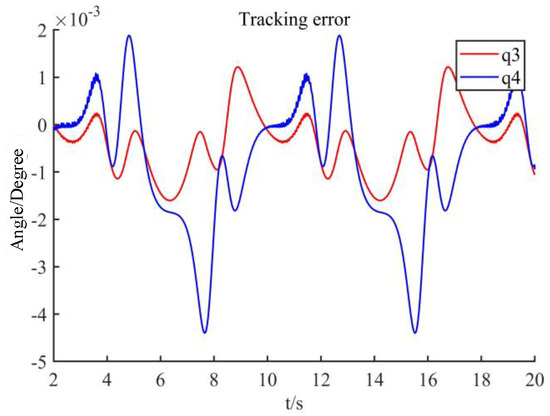
Figure 6.
Tracking error.
Further, a comparison between the proposed method and three commonly used control methods, i.e., the neural network adaptive control [25], robust adaptive control [26], and fuzzy adaptive control [27], is carried out. The trajectory track and tracking error under the different control methods are shown in Figure 7, Figure 8, and Table 3, respectively. From these figures, it can be seen that the proposed control method has a smaller relative tracking error and deviation angle than the other ones. This is because the proposed method considers input nonlinearity, output saturation, and external disturbances together, while the other methods do not. Although these common methods have excellent performance without constraints, they cannot deal with these constraints when there are input deadzones and output saturation constraints. Compared with the methods proposed in this paper, the trajectory-tracking control accuracy is relatively lower.
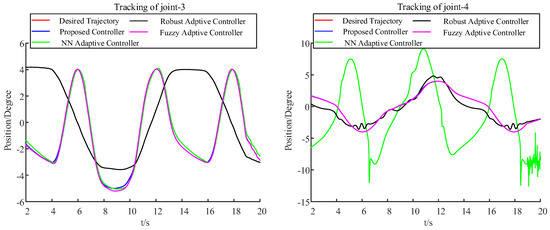
Figure 7.
Trajectory tracking under different methods.
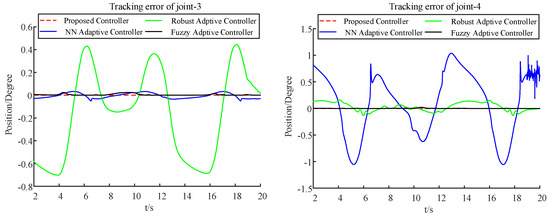
Figure 8.
Tracking error under different methods.
Table 3.
Performance comparison.
4.2. Experiment
To further validate the proposed method, an experiment based on the JAKA robot platform experiment was conducted. The layout of the robot manipulator is shown in Figure 1. The type of manipulator is a collaborative ultralight robot, JAKA zu7s. The position model controls the joints in Cartesian space, while the velocity model and torque model control the joints in angular space. The signals are sent to the DSP controller through a USB port by MATLAB R2018b and by compiling the program. The execution frequency and sampling frequency of the controller are 100 Hz and 20 Hz, respectively. The following is the reference input trajectory
The parameters of the deadzone are defined as br = 5, bl = −5, hr = 15, and hl = −10. The experimental results are shown in Figure 9, which shows that all joints have good tracking performance, and the proposed constraints are guaranteed by the experimental setup. For all joints, the average tracking error is within 0.01 degree, and the trajectories converge within the constraint range. Thus, the proposed method can realize highly precious tracking control.
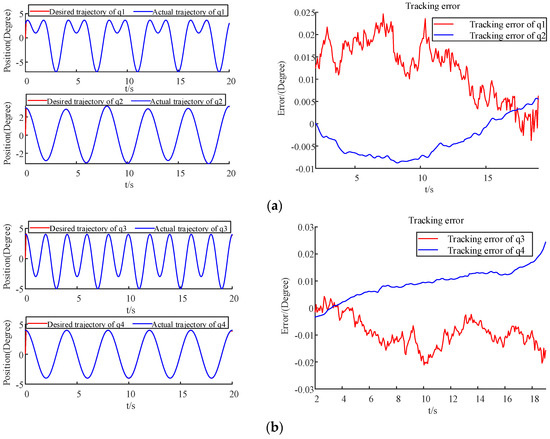
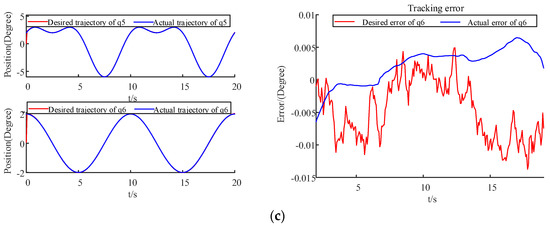
Figure 9.
Tracking performance and errors for each joint of the 6DOF robot. (a) Tracking performance and tracking error of q1 and q2; (b) Tracking performance and tracking error of q3 and q4; (c) Tracking performance and tracking error of q5 and q6.
5. Conclusions
A hybrid state/disturbance observer-based multiple-constraint control method for a manipulator is developed and evaluated in this study. The proposed hybrid state/disturbance observer can accurately estimate unmeasurable states and external disturbances. Combining back-stepping and BLF approaches, we propose an adaptive controller that can achieve tracking performance in the presence of several constraints and unknown disturbances. Simulations on a 2-DOF robot proved that the proposed strategy is effective. In comparison to several commonly employed intelligent control approaches, its control performance is superior. Experiments on a 6-DOF robot showed that all joints have good tracking performance and do not violate constraints. Future research will focus on the tracking control of underactuated systems with deferred constraints.
Author Contributions
D.X. provided the design idea and conducted the experimental tests, and he was a major contributor in writing the manuscript. T.H. provided valuable suggestions for the experiments and revision of the whole article. Y.M. and X.S. spent a lot of time and effort in helping with the experimental verification of the robot during the manuscript revision stage, which helped a lot in the validation of the research results, mainly in Section 4.2. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially supported by the National Key R&D Program of China (2018YFB1308202).
Institutional Review Board Statement
Not appliable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This work was partially supported by the National Key R&D Program of China (2018YFB1308202).
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
A Lyapunov function is designed as
where is the order of states.
With the derivatives of (A1), and according to (13) and (25), one has
Therefore, the observer is stable.
References
- Padmanabhan, R.; Shetty, M.; Chandar, T.S. Discrete Robust Control of Robot Manipulators using an Uncertainty and Disturbance Estimator. arXiv 2022, arXiv:2203.03805. [Google Scholar]
- Ren, H.; Lin, L.; Wang, Y.; Dong, X. Robust 6-DoF Pose Estimation under Hybrid Constraints. Sensors 2022, 22, 8758. [Google Scholar] [CrossRef]
- Zhao, H. Terminal Angular Constraint Integrated Guidance and Control for Flexible Hypersonic Vehicle with Dead-Zone Input Nonlinearity. J. Beijing Inst. Technol. 2020, 29, 58–72. [Google Scholar]
- Wang, X.-S.; Su, C.-Y.; Hong, H. Robust adaptive control of a class of nonlinear systems with unknown dead-zone. Automatica 2004, 40, 407–413. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.-Y. Neural-Adaptive Control of Single-Master–Multiple-Slaves Teleoperation for Coordinated Multiple Mobile Manipulators with Time-Varying Communication Delays and Input Uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1400–1413. [Google Scholar]
- Wu, X.L.; Wu, X.J.; Zhu, L. Design of observer-based adaptive controller for nonlinear systems with unmodeled dynamics and actuator dead-zone. Int. J. Autom. Comput. 2011, 8, 201–208. [Google Scholar] [CrossRef]
- Tong, S.; Wang, T.Y.; Zhang, H. Adaptive Neural Network Output Feedback Control for Stochastic Nonlinear Systems with Unknown Dead-Zone and Unmodeled Dynamics. Cybernetics 2014, 44, 910–921. [Google Scholar] [CrossRef]
- Hu, C.; Yao, B.; Wang, Q. Performance-Oriented Adaptive Robust Control of a Class of Nonlinear Systems Preceded by Unknown Dead Zone with Comparative Experimental Results. Mechatron. IEEE/ASME Trans. 2013, 18, 178–189. [Google Scholar] [CrossRef]
- Sang, S.; Zhang, R.; Lin, X. Model-Free Adaptive Iterative Learning Bipartite Containment Control for Multi-Agent Systems. Sensors 2022, 22, 7115. [Google Scholar] [CrossRef]
- Wang, F.; Hong, Y.; Guang-Hong, L.-B. Adaptive fuzzy asymptotic tracking control of uncertain nonaffine nonlinear systems with non-symmetric dead-zone nonlinearities. Inf. Sci. Int. J. 2016, 348, 1–21. [Google Scholar]
- Luo, S.C.; Zhu, S.Q.; Wang, H.F. Adaptive PID saturate output feedback control of robot manipulators. Transducer Microsyst. Technol. 2012, 31, 66–70. [Google Scholar]
- Yang, C.; Huang, D.; He, W.; Cheng, L. Neural Control of Robot Manipulators with Trajectory Tracking Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4231–4242. [Google Scholar] [CrossRef]
- Yan, X.; Chen, M.; Feng, G.; Wu, Q.; Shao, S. Fuzzy Robust Constrained Control for Nonlinear Systems with Input Saturation and External Disturbances. IEEE Trans. Fuzzy Syst. 2021, 29, 345–356. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S.; Li, T. Adaptive fuzzy output-feedback control for output constrained nonlinear systems in the presence of input saturation. Fuzzy Sets Syst. 2014, 248, 138–155. [Google Scholar] [CrossRef]
- Bu, X.; Wang, Q.; Hou, Z.; Qian, W. Data driven control for a class of nonlinear systems with output saturation. ISA Trans. 2018, 81, 88–100. [Google Scholar] [CrossRef]
- Xing, A.; Yang, Y.; Zhao, B.; Ding, D.-W.; Yin, Y. Observer-Based Adaptive Controller Design for Nonlinear Saturation Systems with Output Constraints. IFAC-Pap. 2020, 53, 675–680. [Google Scholar] [CrossRef]
- Han, X.; Ma, Y.; Fu, L. Finite-time dynamic output-feedback dissipative control for singular uncertainty T–S fuzzy systems with actuator saturation and output constraints. J. Frankl. Inst. 2020, 357, 4543–4573. [Google Scholar] [CrossRef]
- Yang, C.; Chen, C.; Wei, C.; Rongxin, Z. Robot Learning System Based on Adaptive Neural Control and Dynamic Movement Primitives. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 777–787. [Google Scholar] [CrossRef]
- Tang, Z.L.; Tee, K.P.; He, W. Tangent Barrier Lyapunov Functions for the Control of Output-Constrained Nonlinear Systems. IFAC Proc. Vol. 2013, 46, 449–455. [Google Scholar] [CrossRef]
- He, W.; Sun, C.; Ge, S.S. Top Tension Control of a Flexible Marine Riser by Using Integral-Barrier Lyapunov Function. IEEE/ASME Trans. Mechatron. 2015, 20, 497–505. [Google Scholar] [CrossRef]
- Esfandiari, K.; Abdollahi, F.; Talebi, H.A. Adaptive Control of Uncertain Nonaffine Nonlinear Systems with Input Saturation Using Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2311–2322. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, J.; Yan, H.; Wang, Y. Event-triggered adaptive finite-time control for nonlinear systems under asymmetric time-varying state constraints. Front. Inf. Technol. Electron. Eng. 2021, 22, 1610–1624. [Google Scholar] [CrossRef]
- Fang, X.; Fan, H.; Liu, L.; Wang, B. Adaptive fixed-time fault-tolerant control of saturated MIMO nonlinear systems with time-varying state constrains. Nonlinear Dyn. 2022. [Google Scholar] [CrossRef]
- Liu, Y.J.; Lu, S.; Tong, S. Neural Network Controller Design for an Uncertain Robot with Time-Varying Output Constraint. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2060–2068. [Google Scholar] [CrossRef]
- He, W.; David, A.O.; Yin, Z.; Sun, C. Neural Network Control of a Robotic Manipulator with Input Deadzone and Output Constraint. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 759–770. [Google Scholar] [CrossRef]
- Zhu, Z.; Pan, Y.; Zhou, Q.; Lu, C. Event-Triggered Adaptive Fuzzy Control for Stochastic Nonlinear Systems with Unmeasured States and Unknown Backlash-like Hysteresis. IEEE Trans. Fuzzy Syst. 2020, 29, 1273–1283. [Google Scholar] [CrossRef]
- Fu, Y.; Wang, D. Higher-Order State and Disturbance Observer with O(T3) Errors for Linear Systems. IEEE Access 2019, 7, 102812–102819. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).