
Crack Detection of Threaded Steel Rods Based on Ultrasonic Guided Waves


Abstract
:1. Introduction
2. UGWs in Cylindrical Rod
2.1. Propagation Characteristics
2.2. Nonlinear Characteristics
2.2.1. Nonlinear Parameters
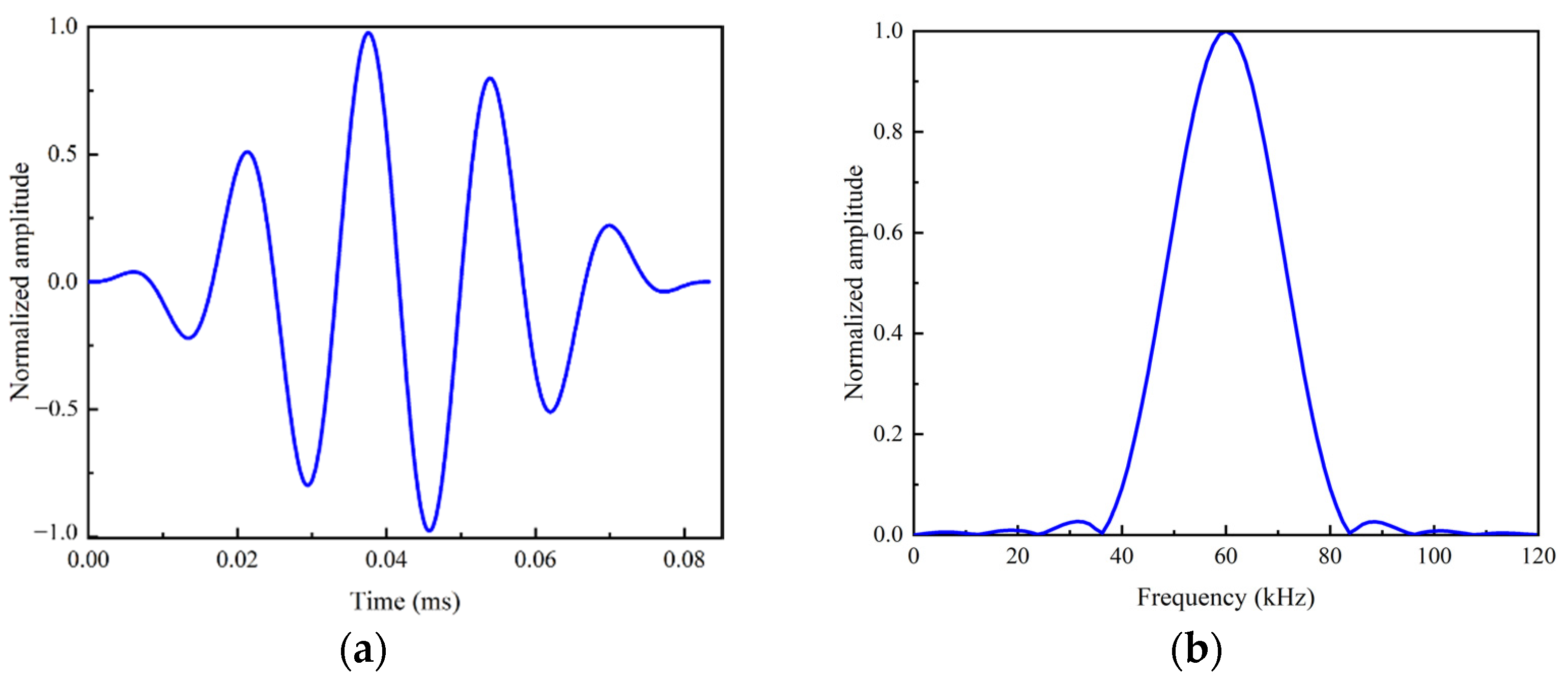
2.2.2. Central Frequency of Excitation Signal
3. Numerical Study
3.1. UGWs Propagation in Undamaged Threaded Rod
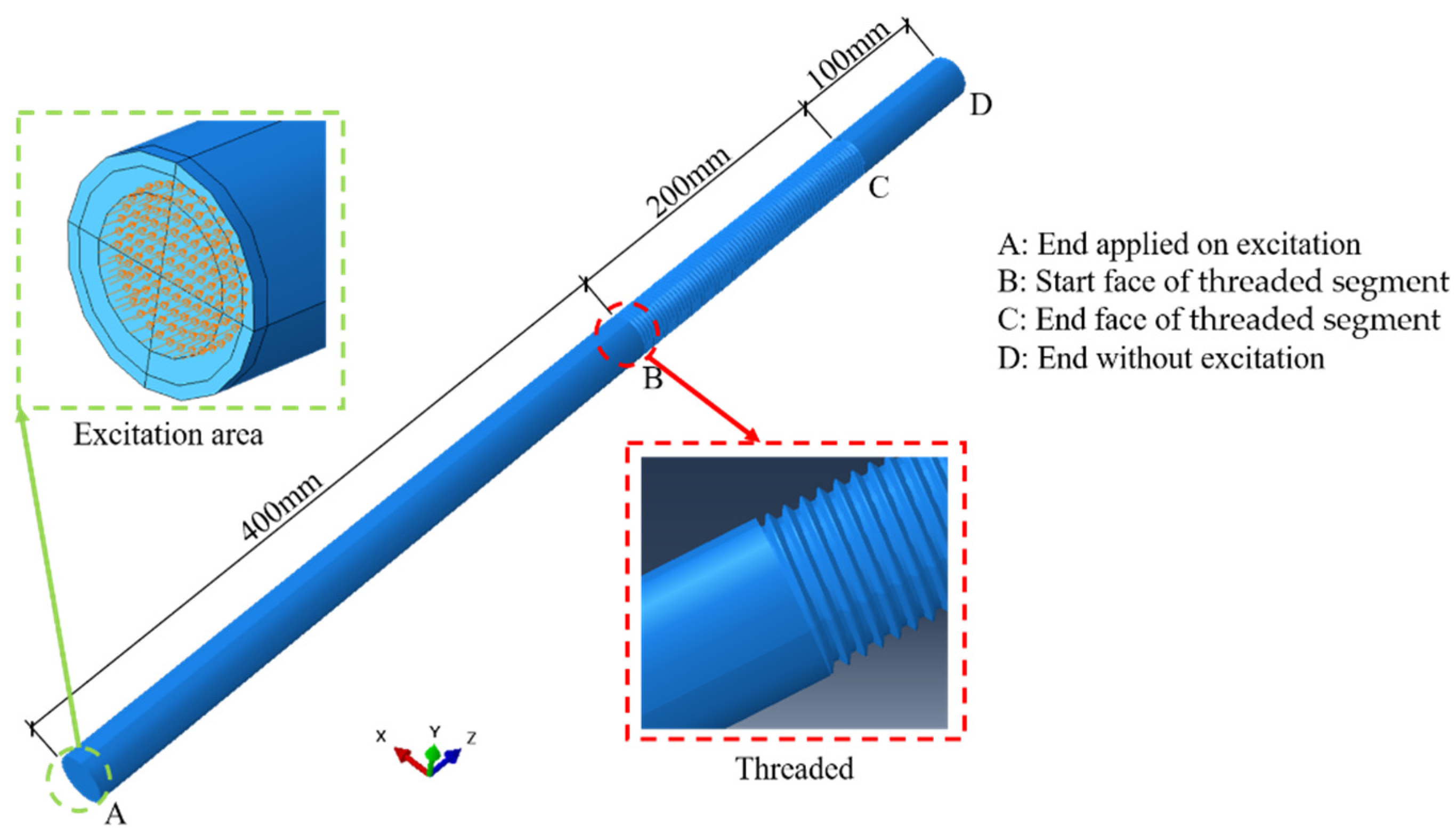
3.1.1. Finite Element Model
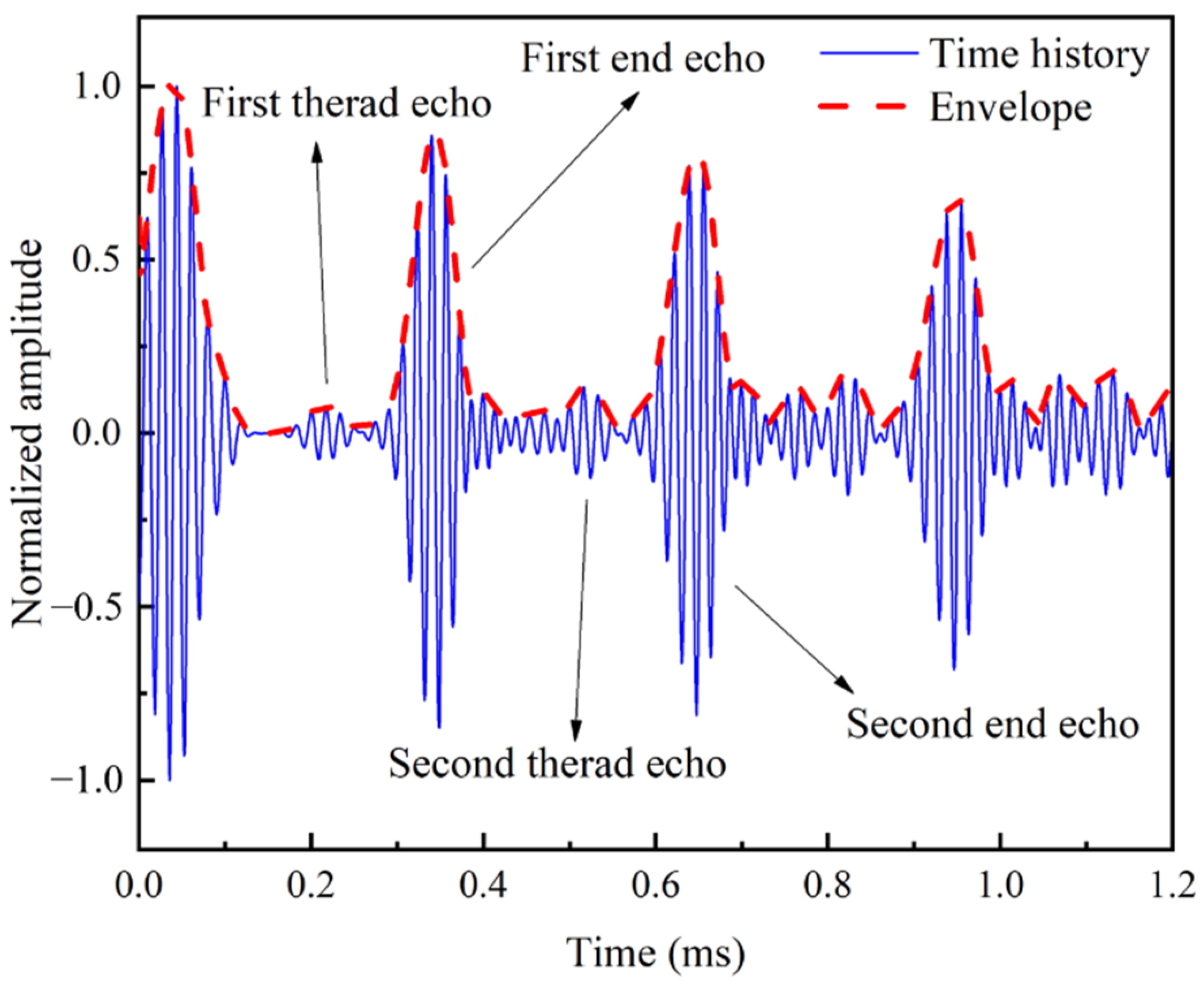
3.1.2. Signal Analysis
3.2. UGWs Propagation in Threaded Rod with Crack
3.2.1. Modeling of “Breathing” Crack
3.2.2. Signal Analysis
4. Experiment
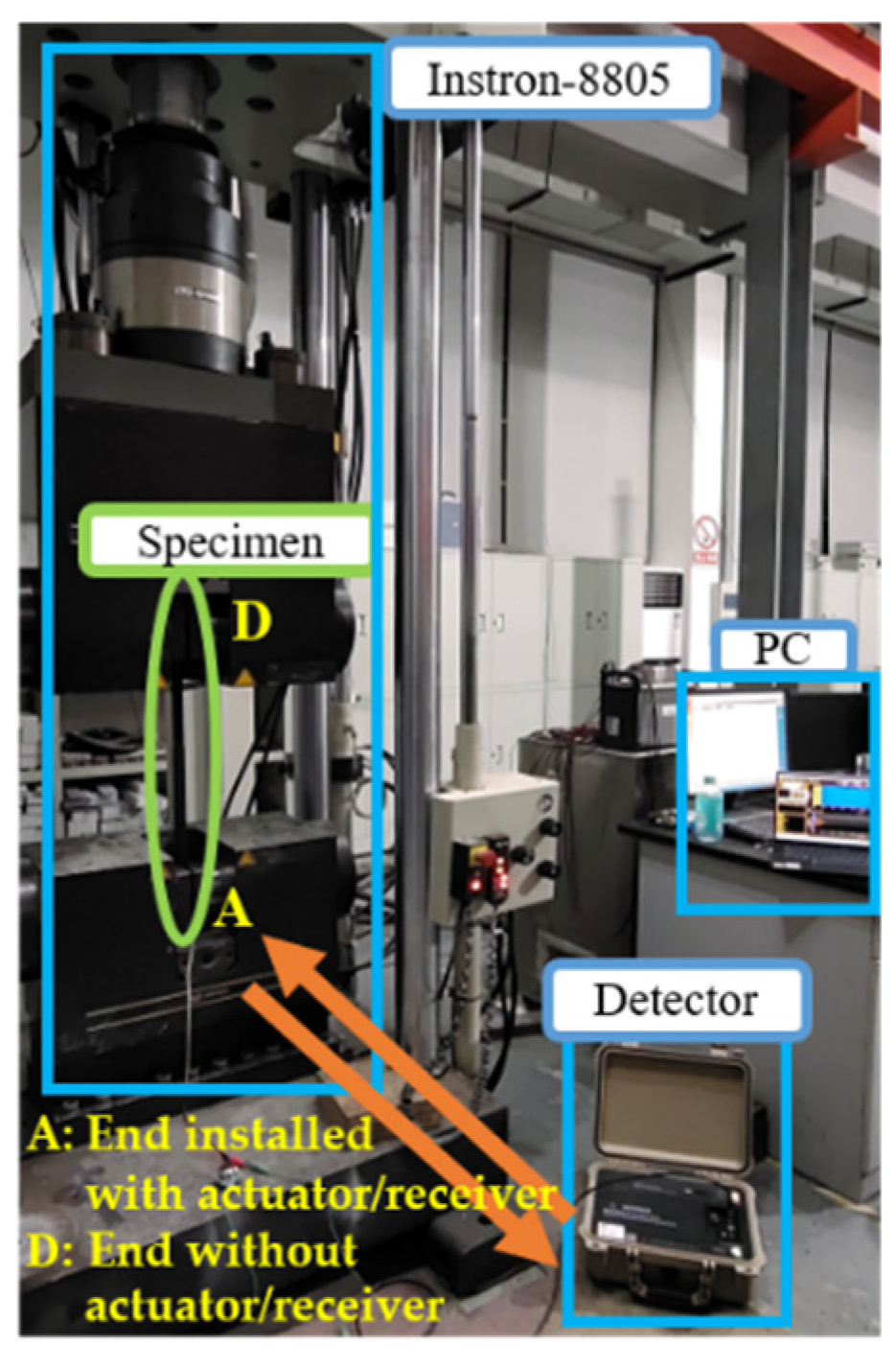
4.1. Specimen and Setup
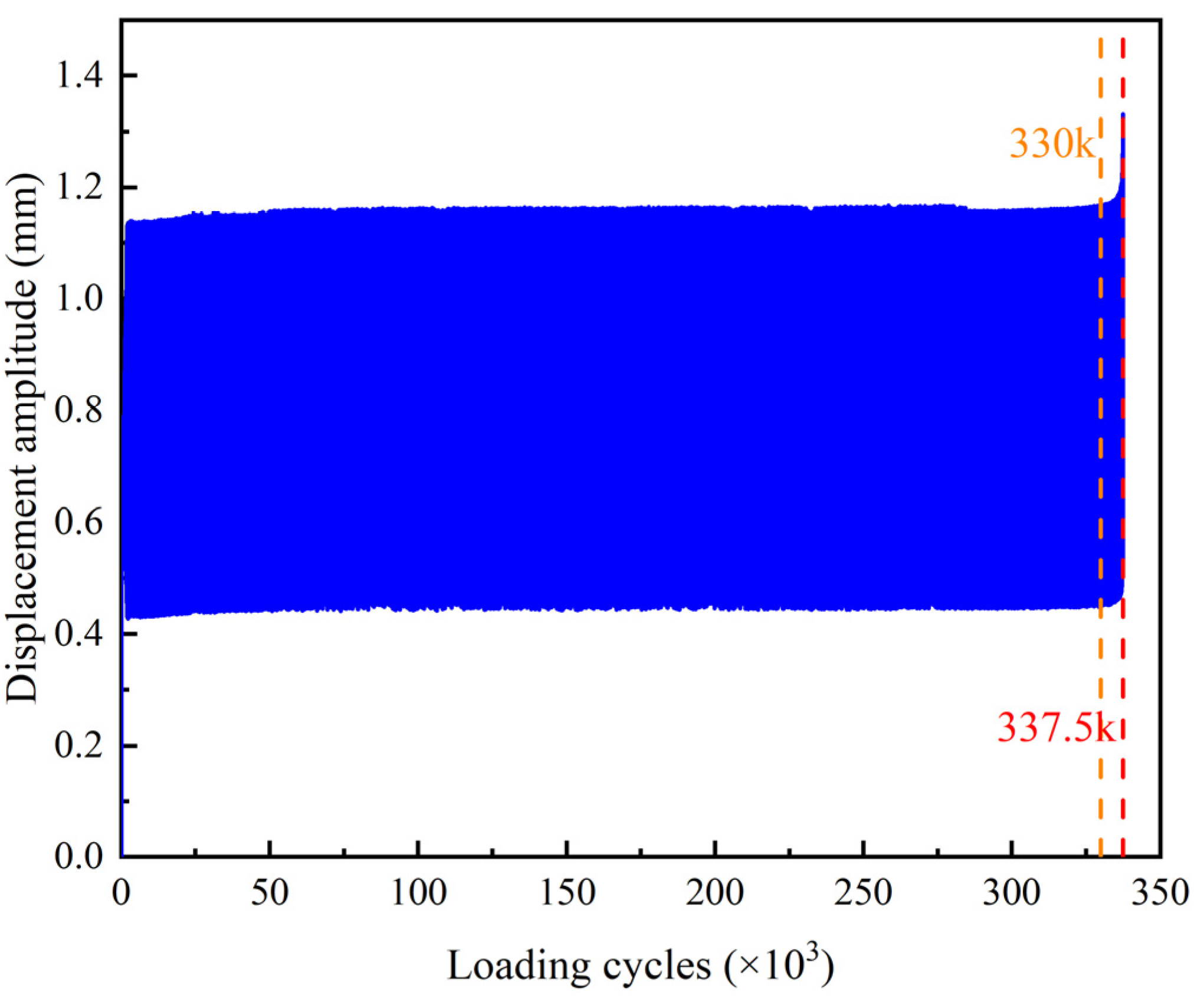
4.2. Fatigue Crack Development
4.3. Experimental Results
4.4. Influence of Number of Modulation Cycles
5. Conclusions
- (1)
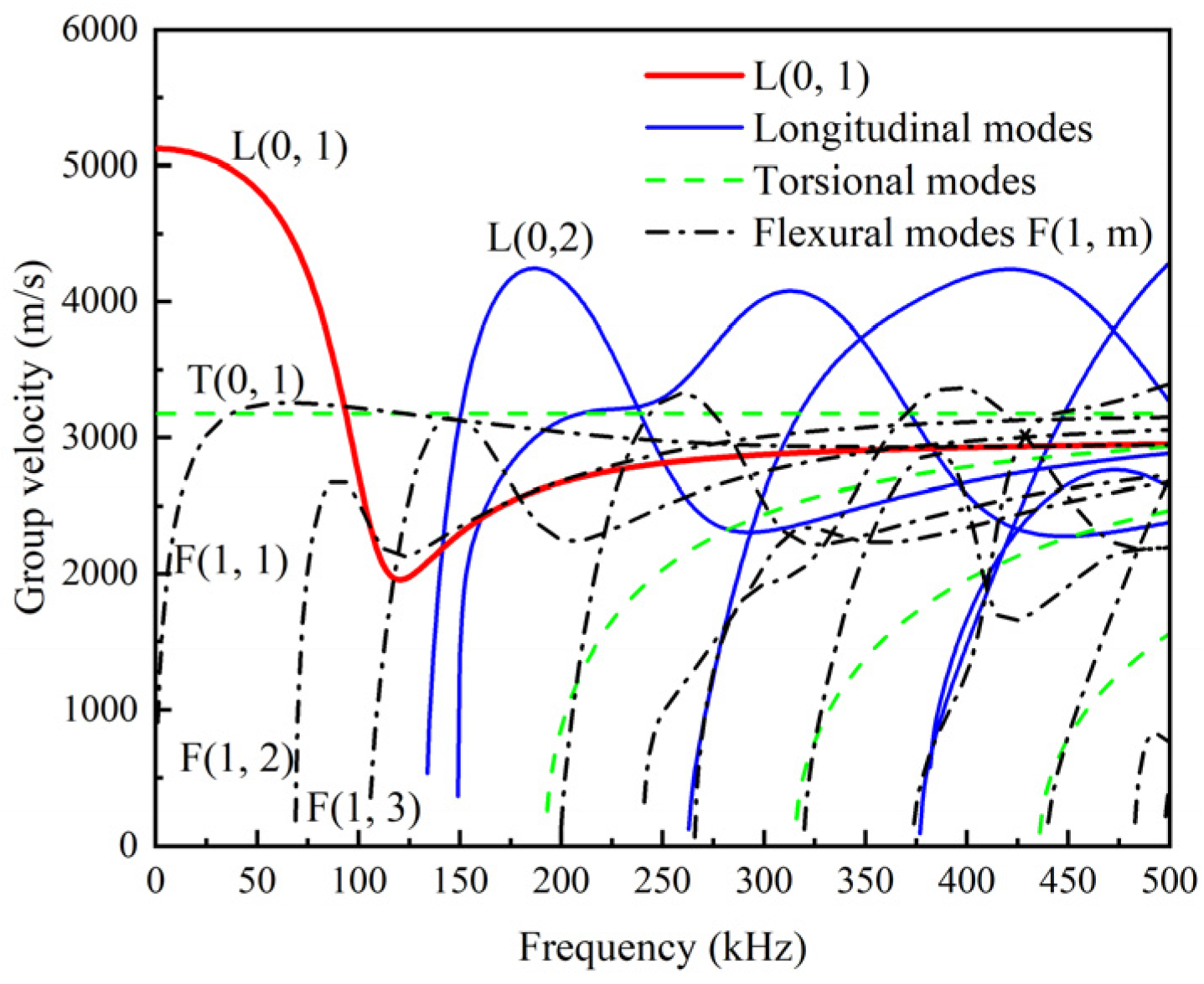
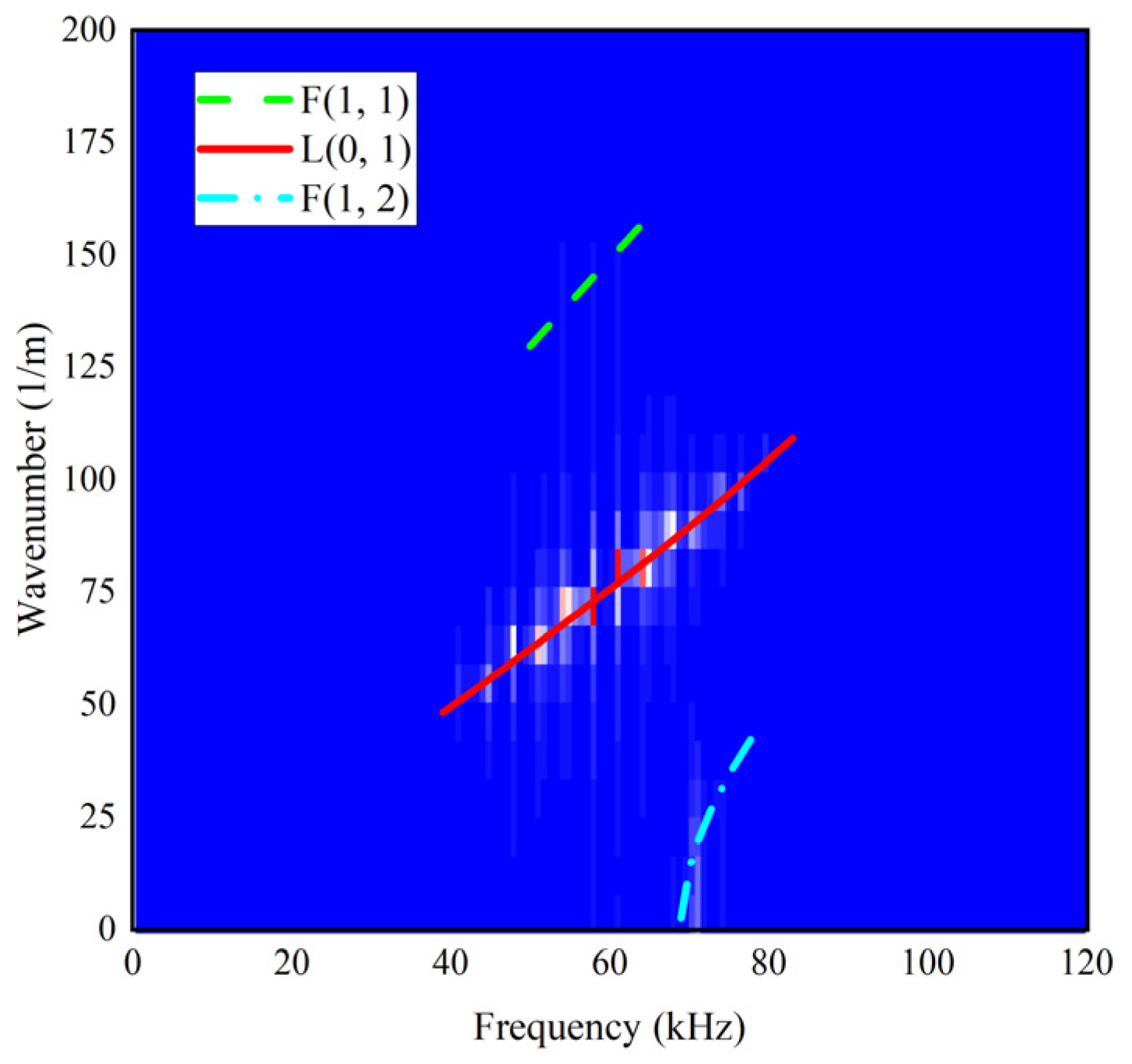
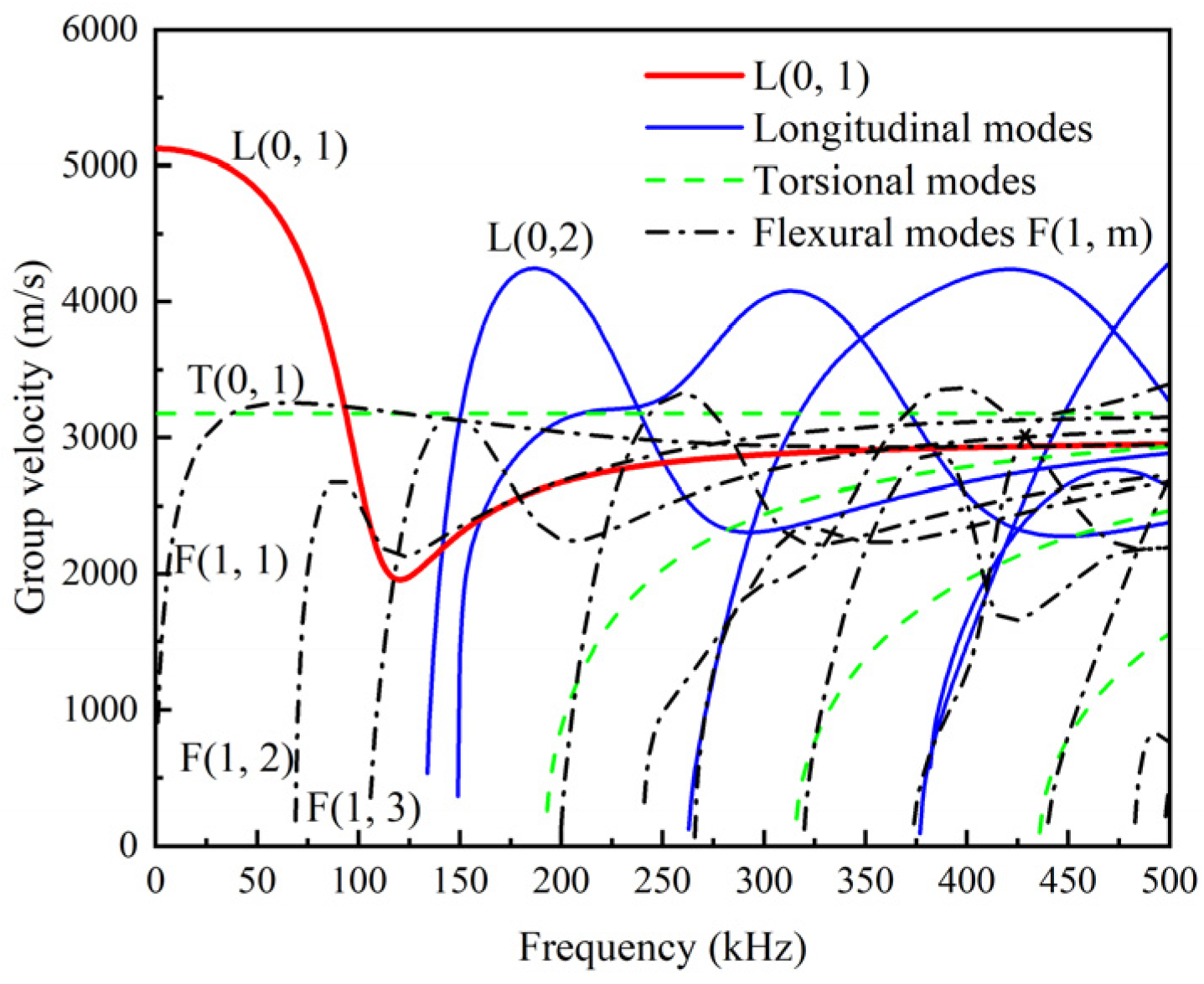
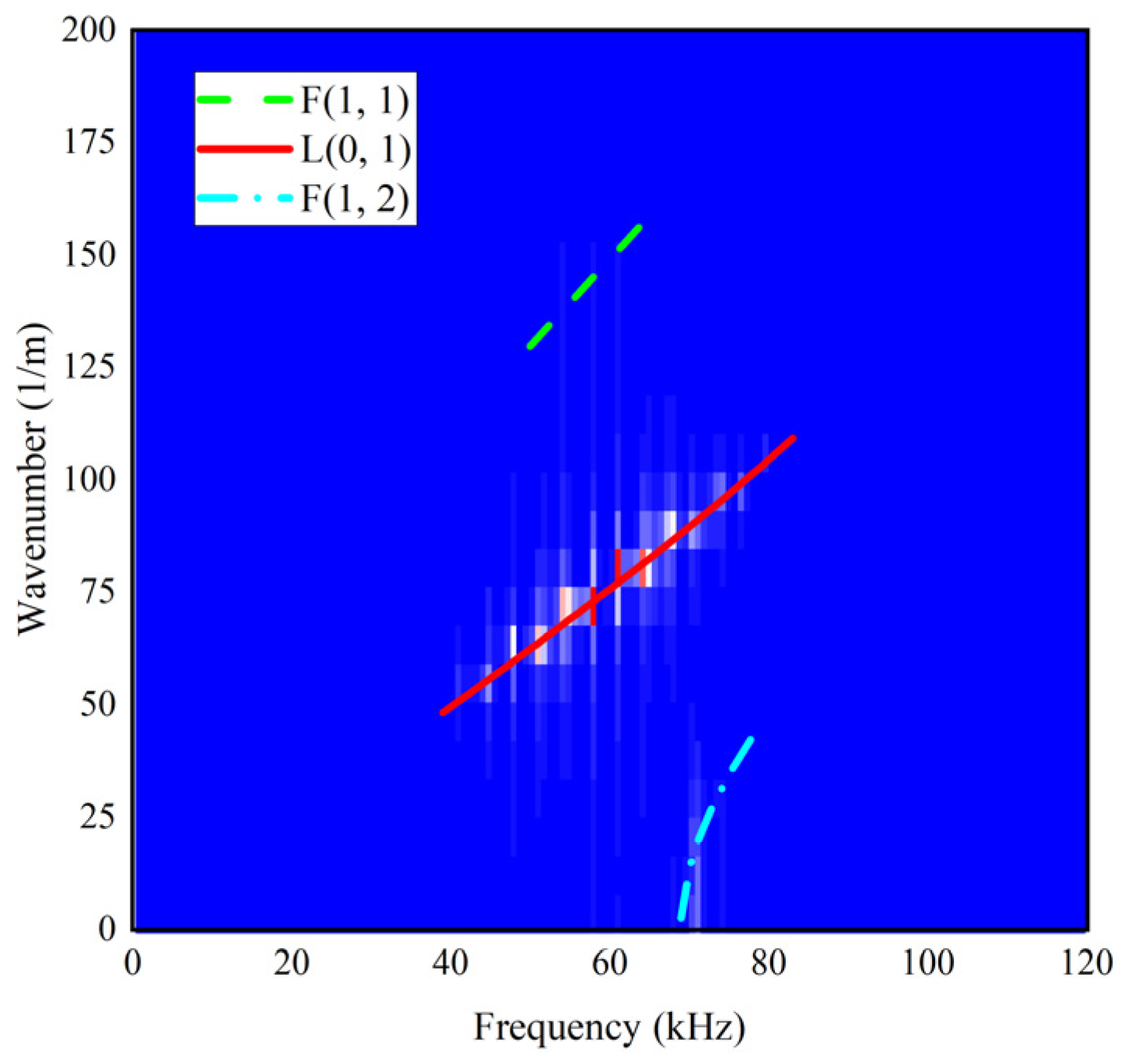
- The longitudinal L(0, 1) modal guided wave has a simple displacement distribution at low frequency when traveling in the rod. It is easy to be excited and the energy of it is concentrated in the axial direction of the rod. Hence, it is suitable for damage detection of rods.
- (2)
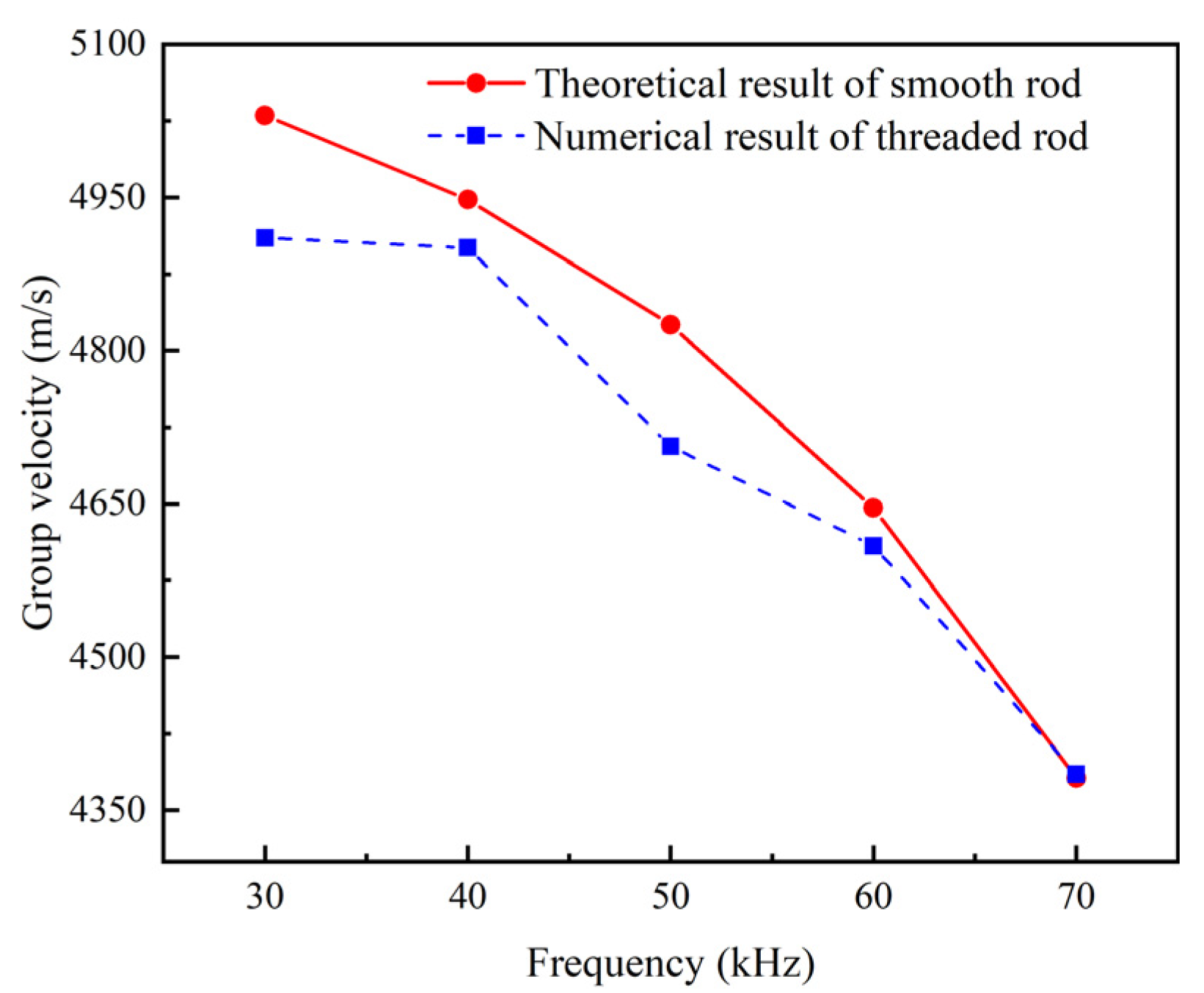
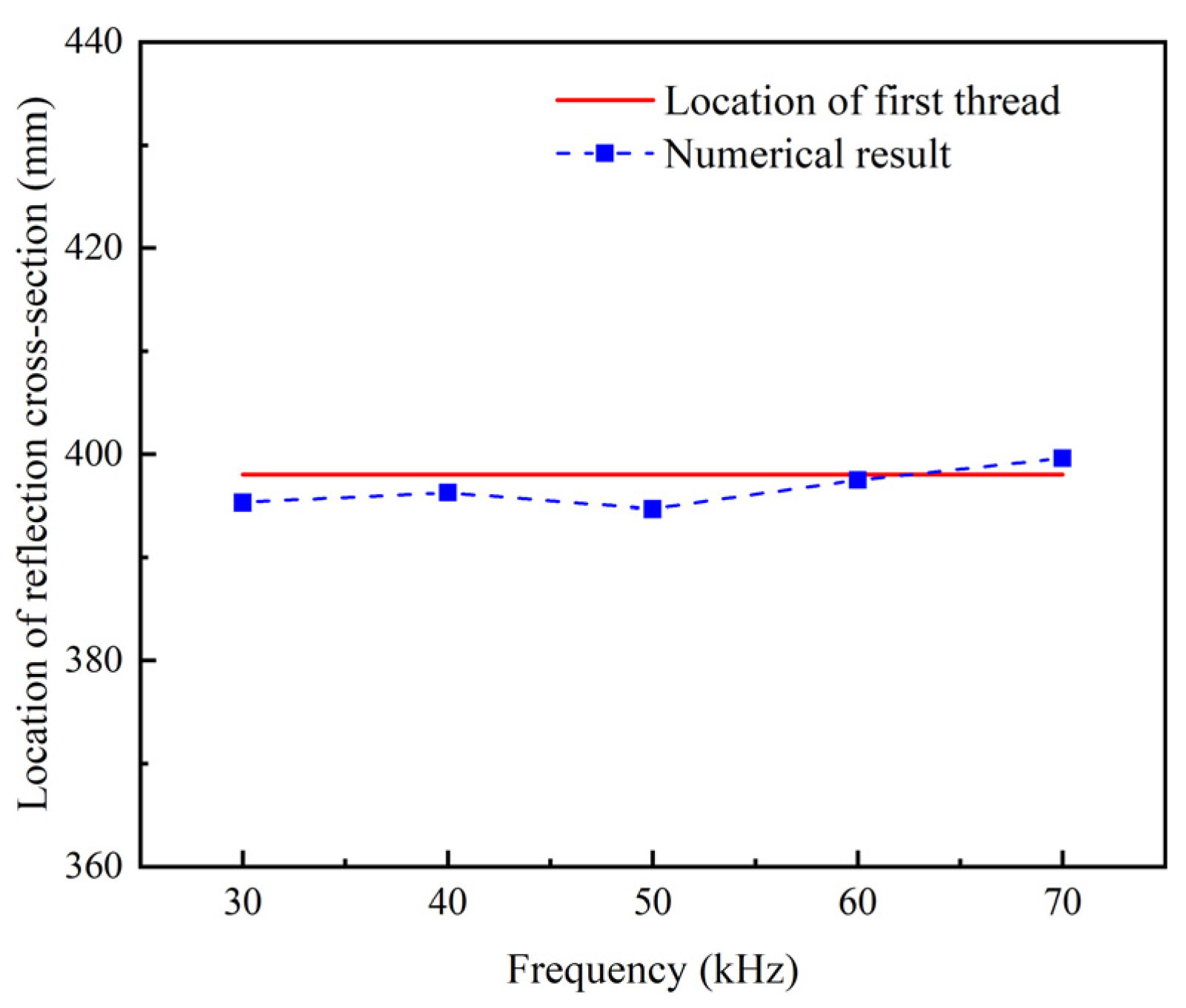
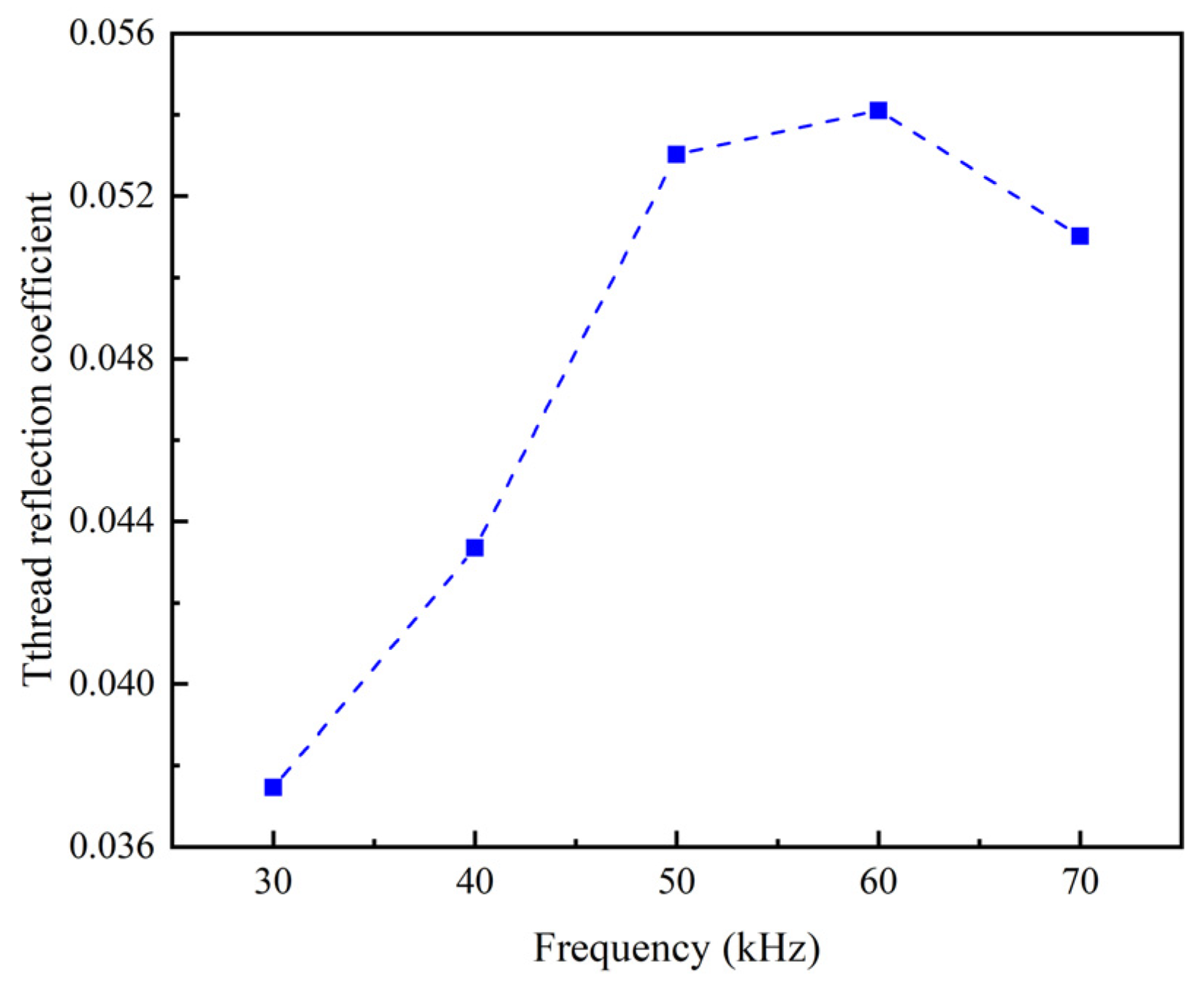
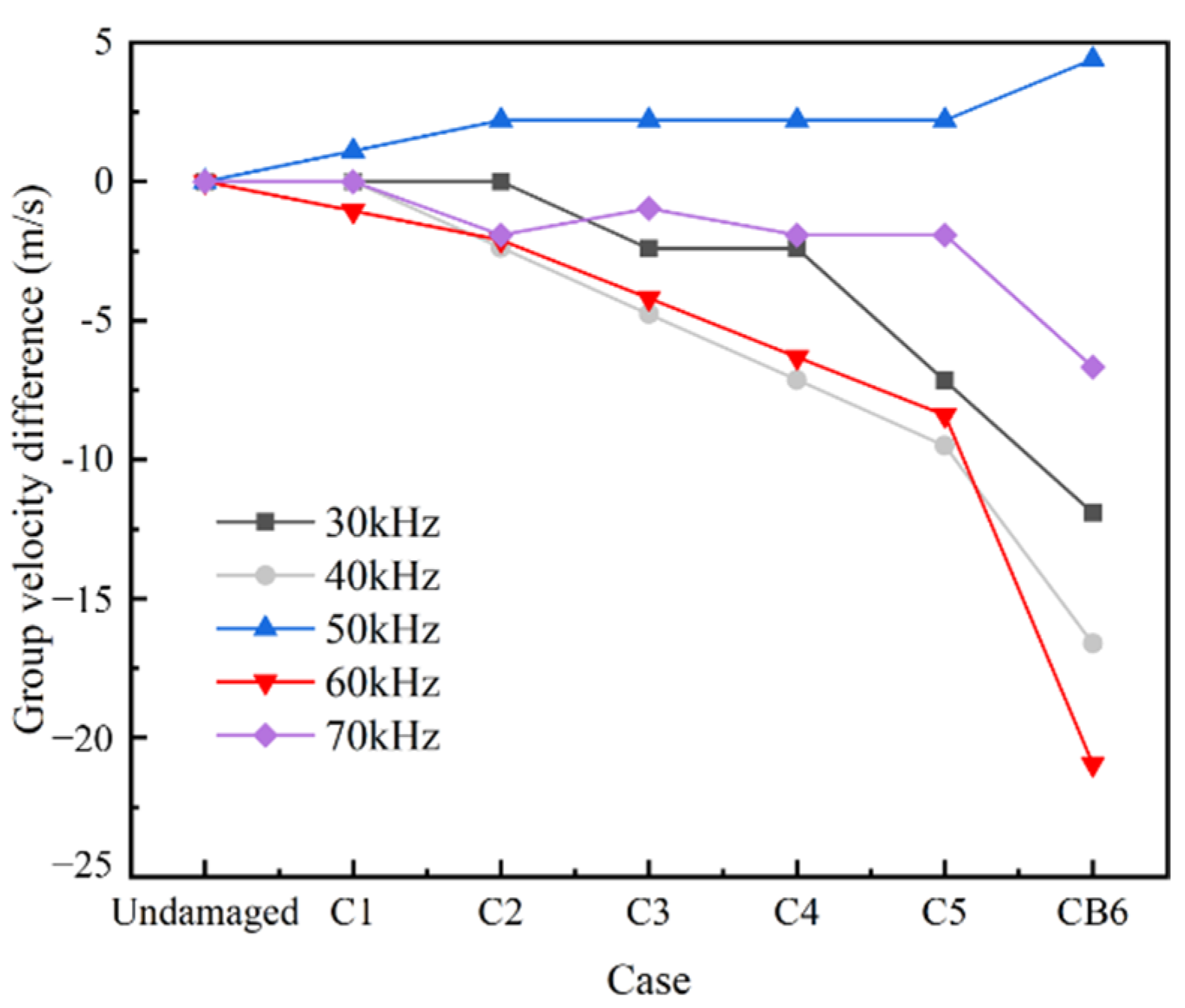
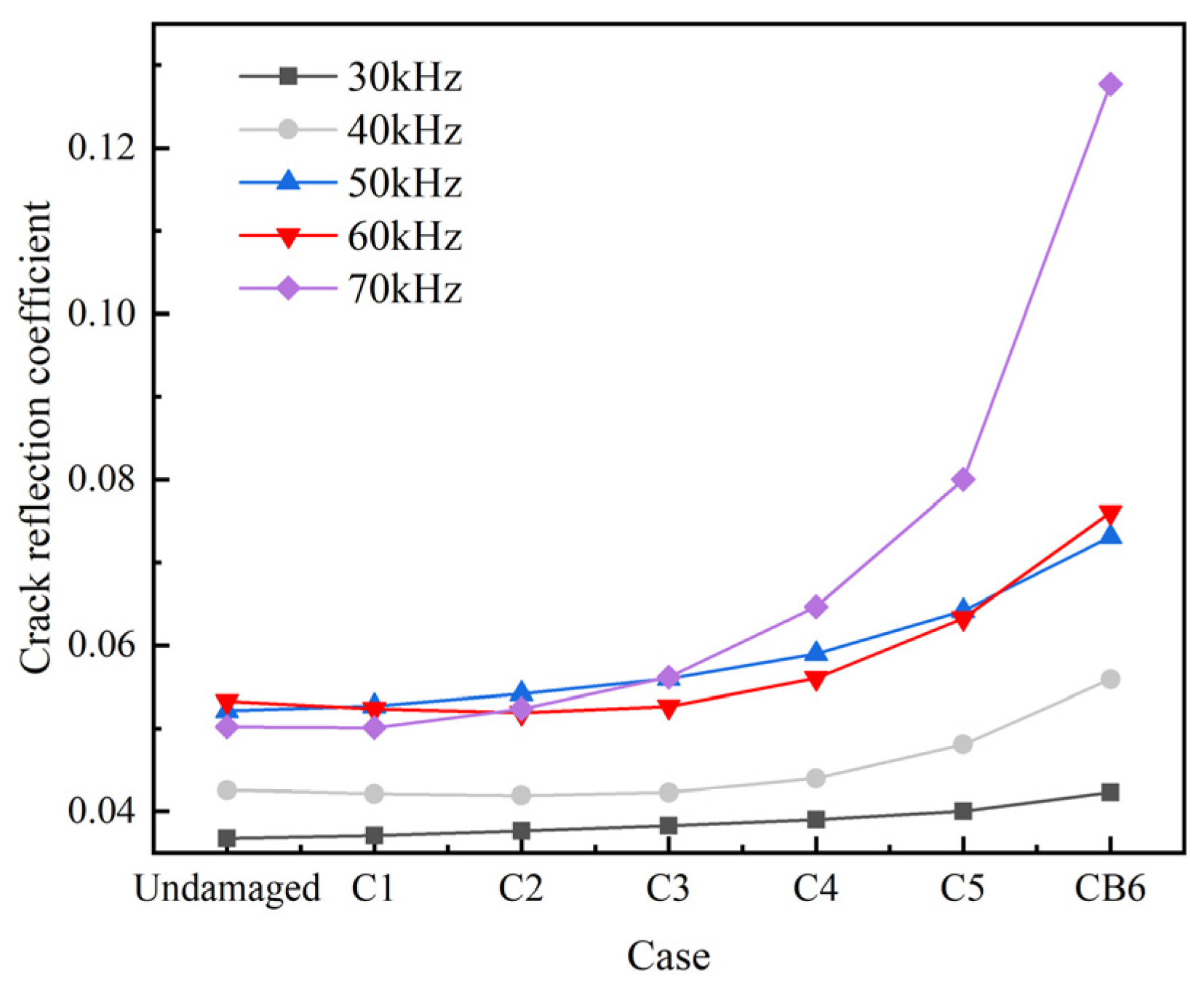
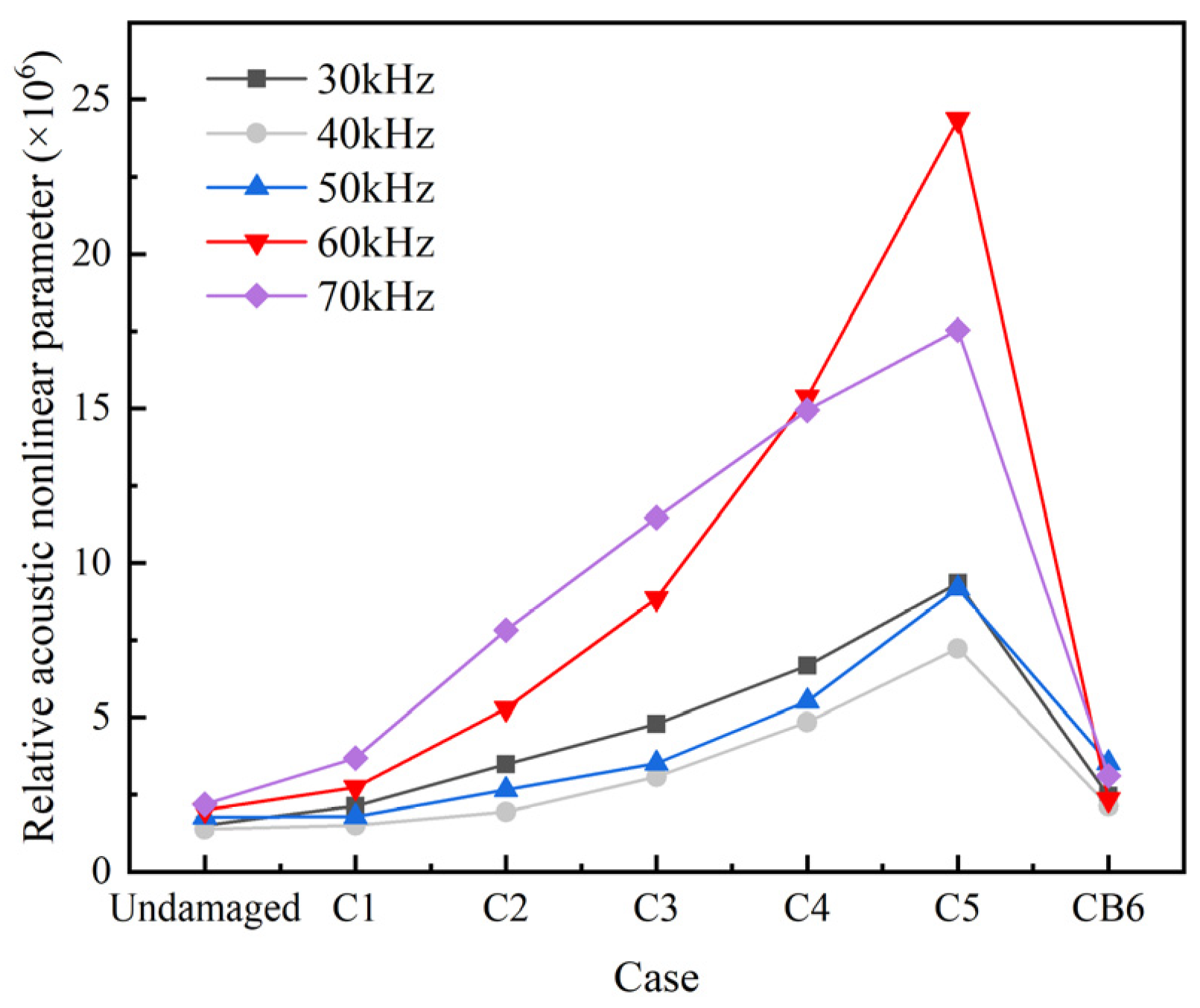
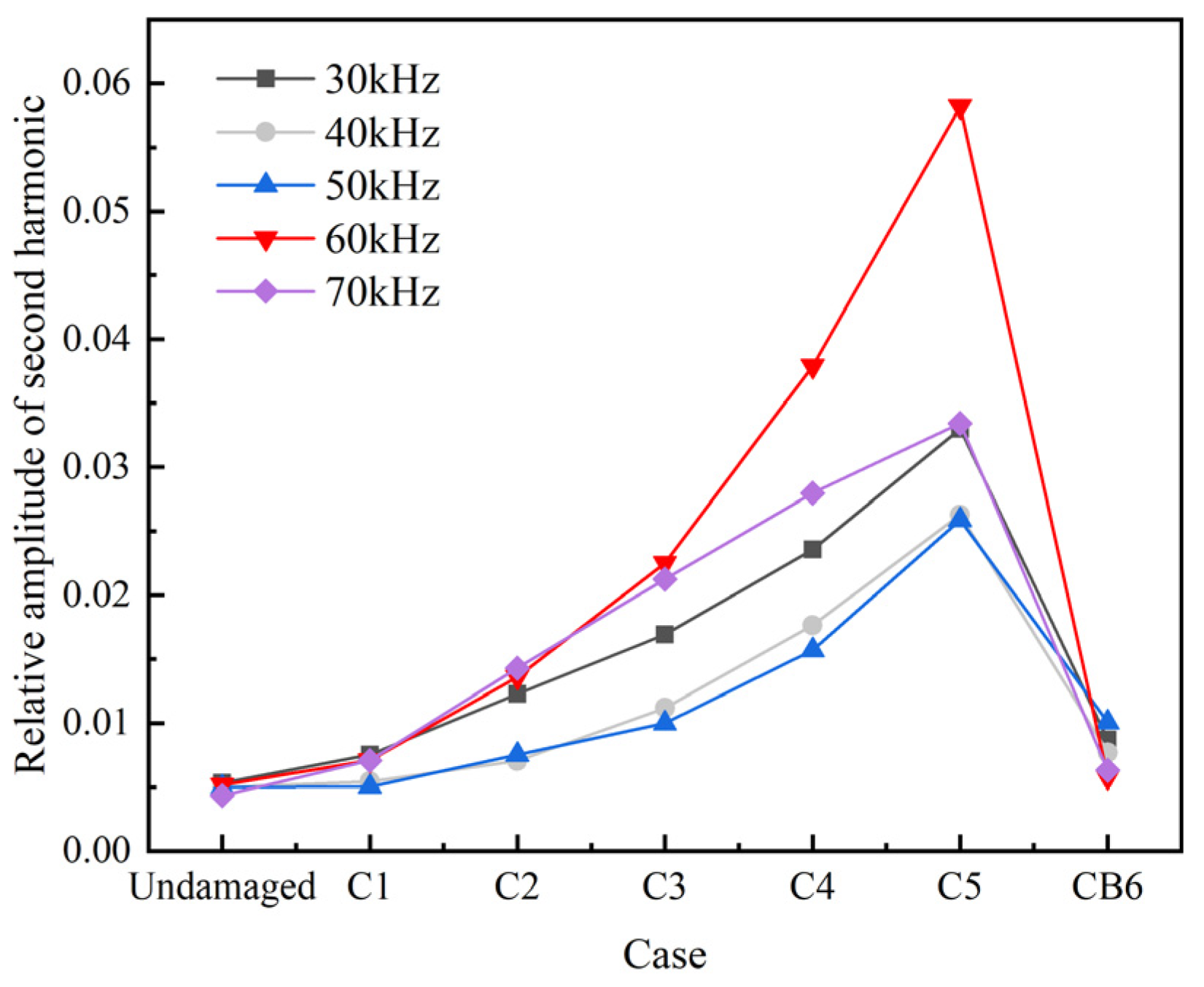
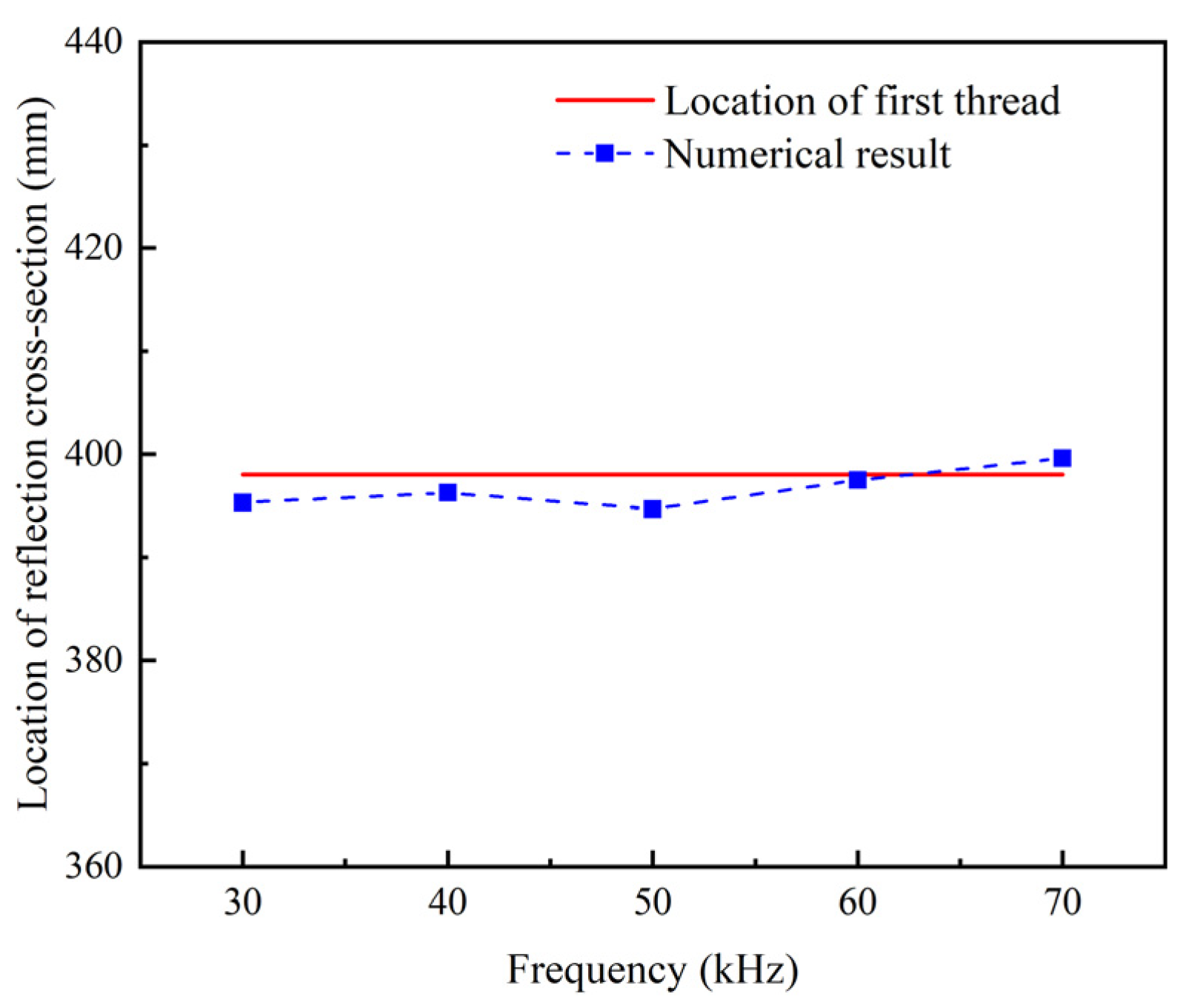
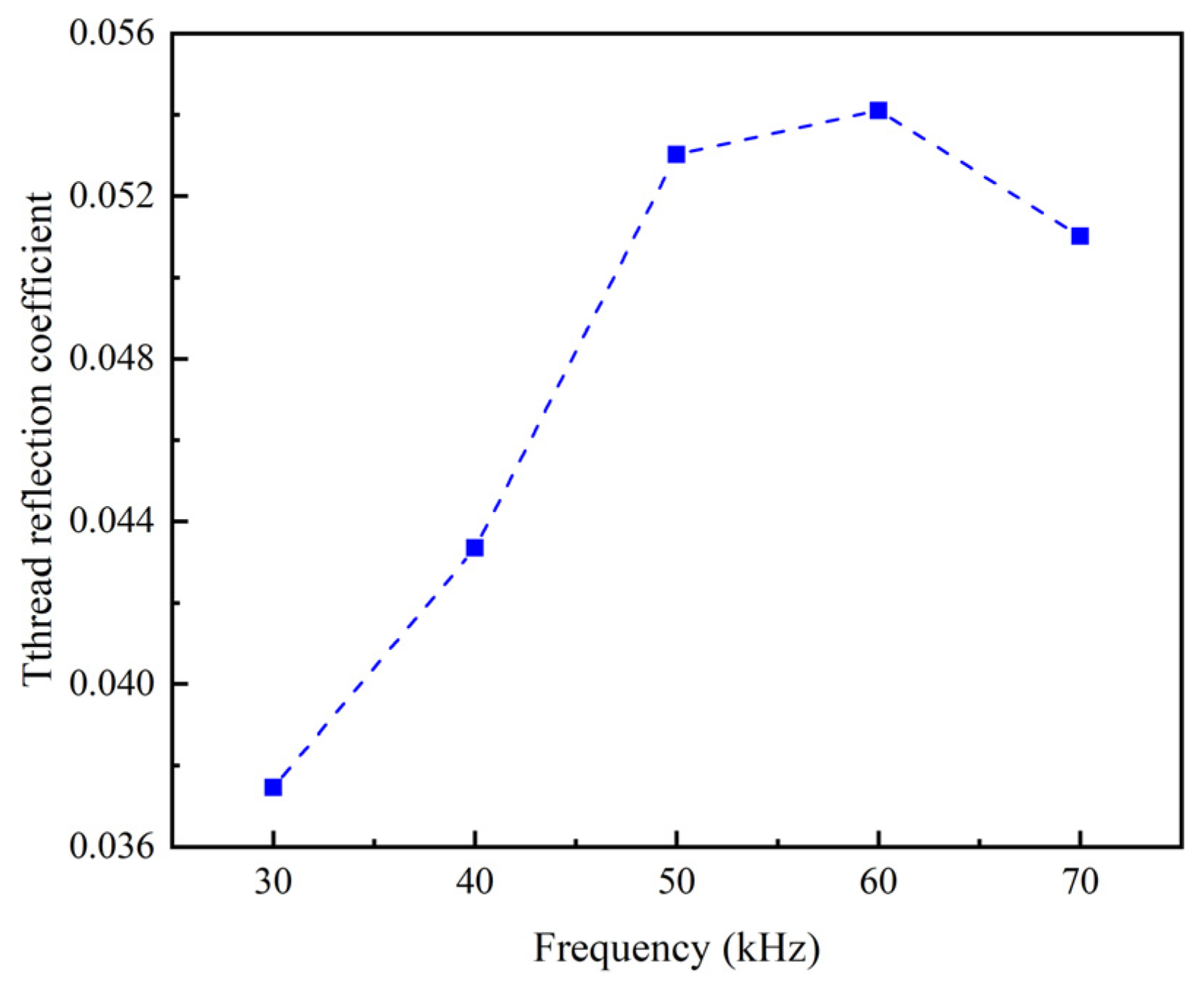
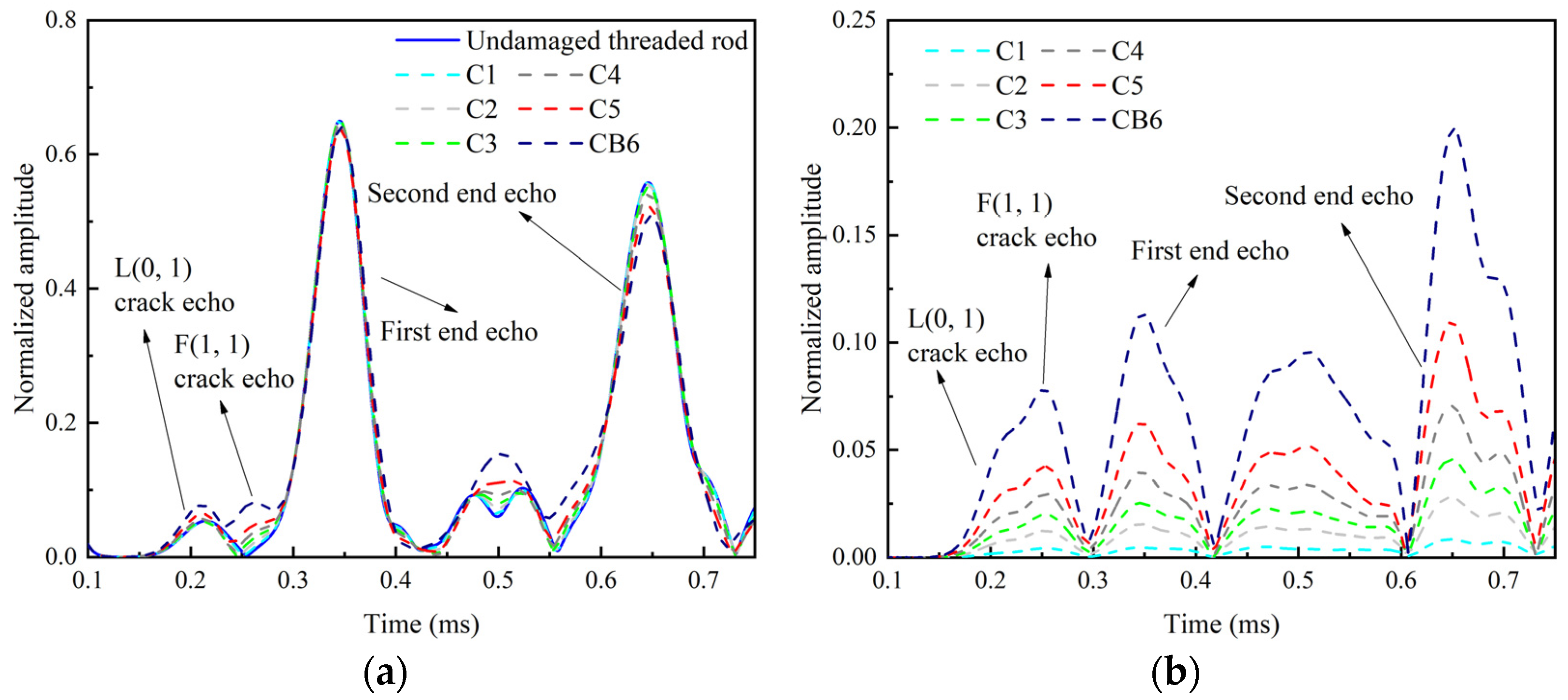
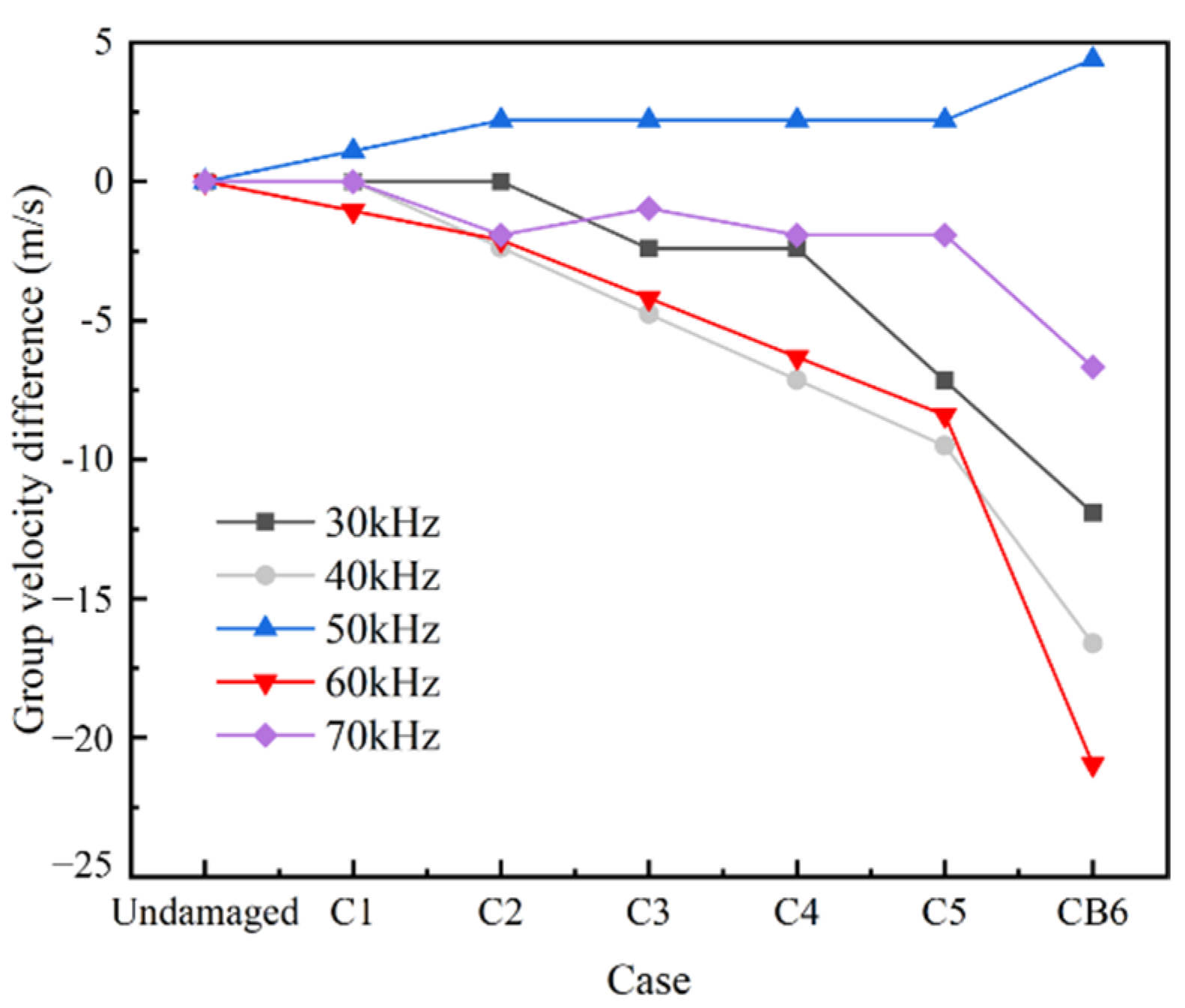
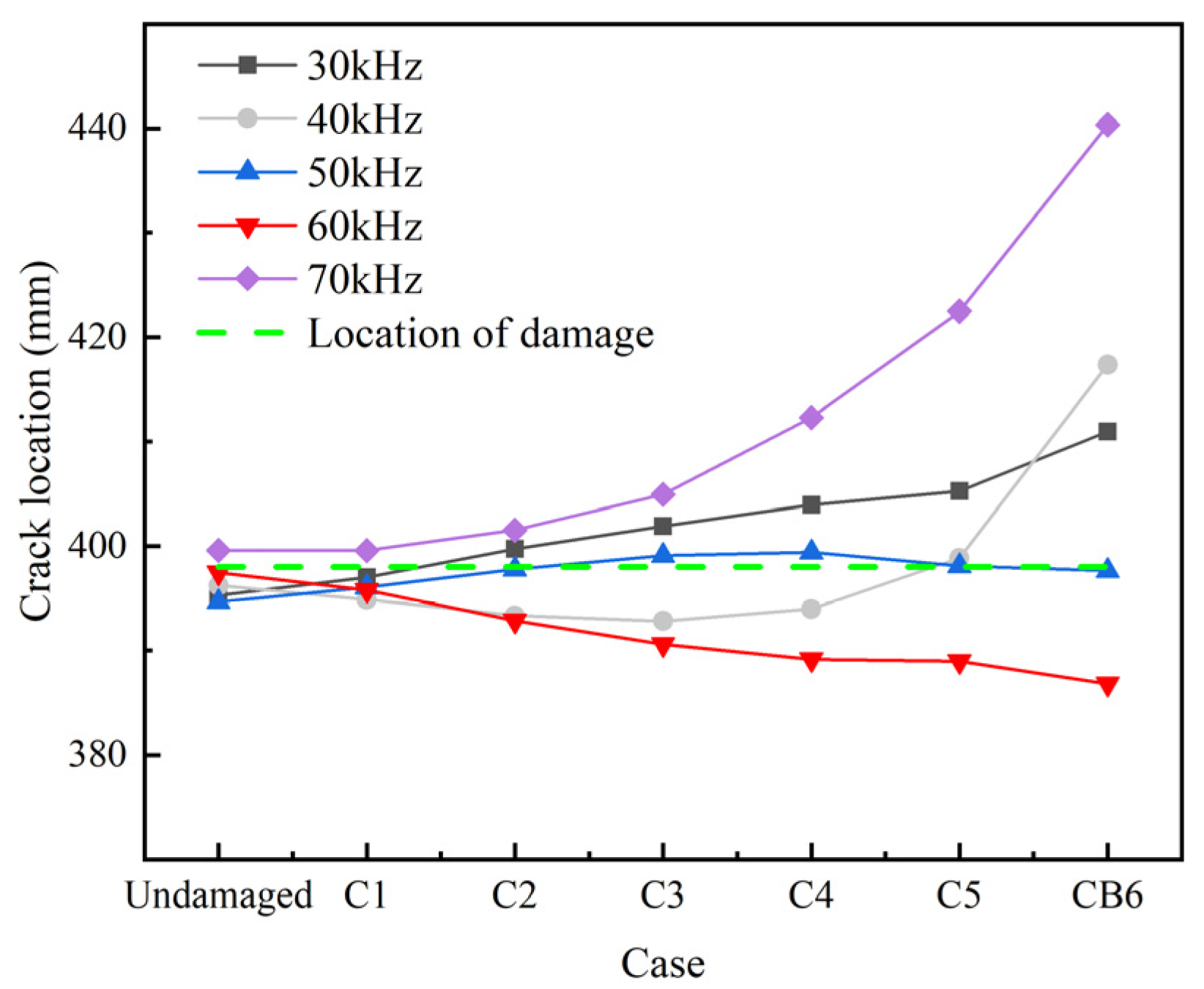
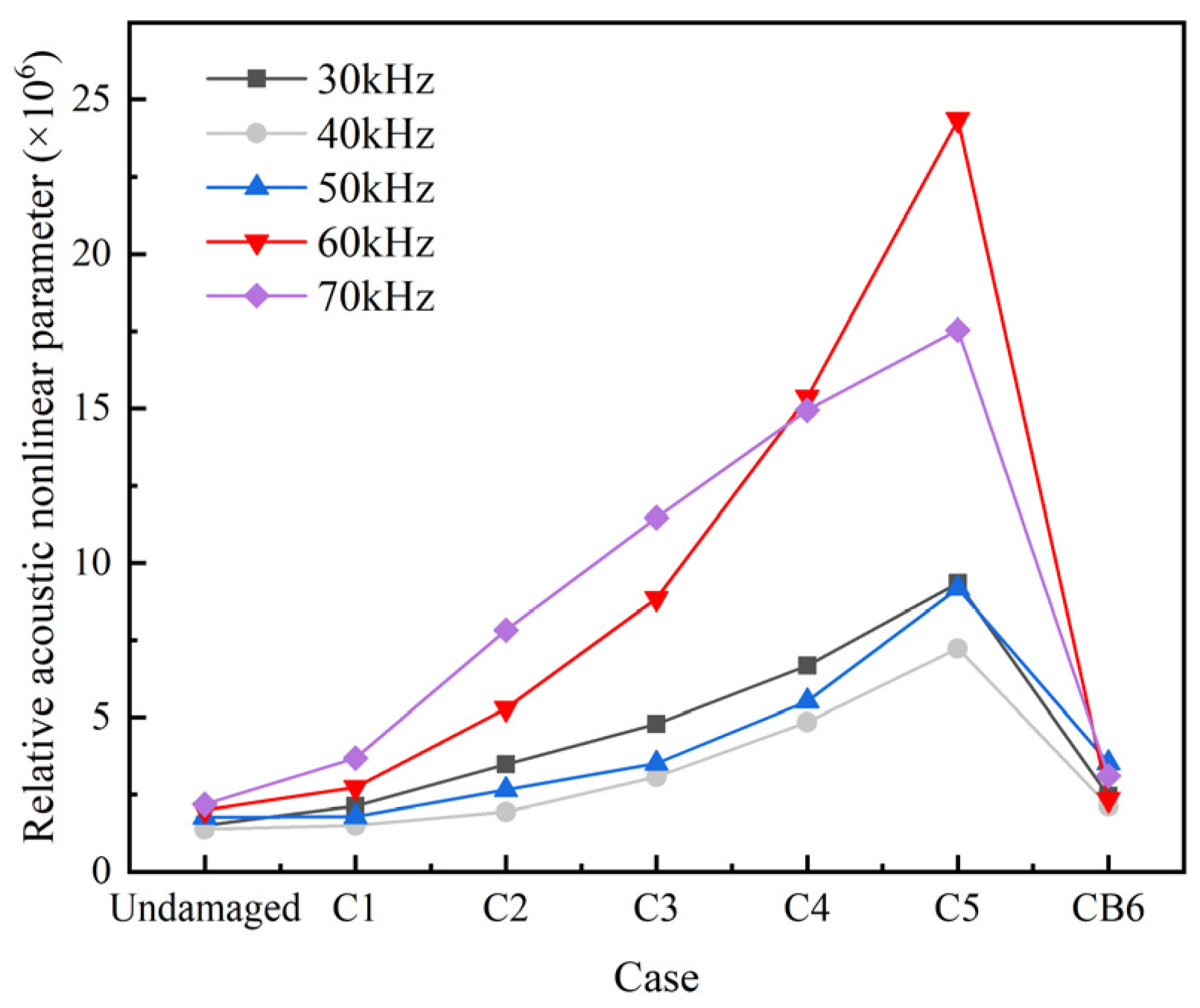
- Via numerical simulations, it is found that the thread-induced cross-sectional changes will cause thread echoes. The linear and nonlinear characteristics of the guided wave obviously change with the growth of cracks, which shows a great potential to use these indexes for damage detection. It is also found that these indexes generally have the highest sensitivity to cracks at central exciting frequency of 60 kHz in the experimental frequency region.
- (3)
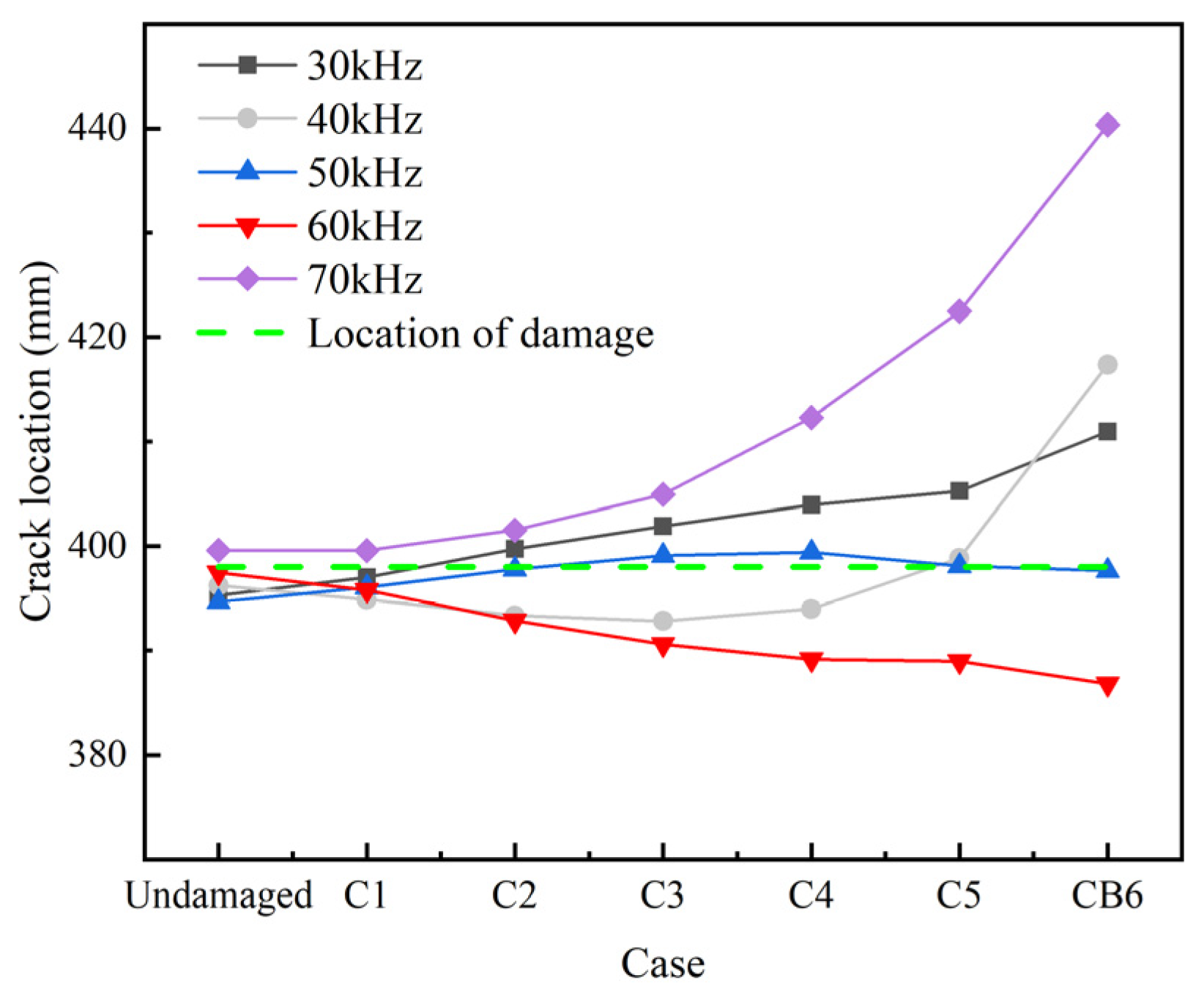
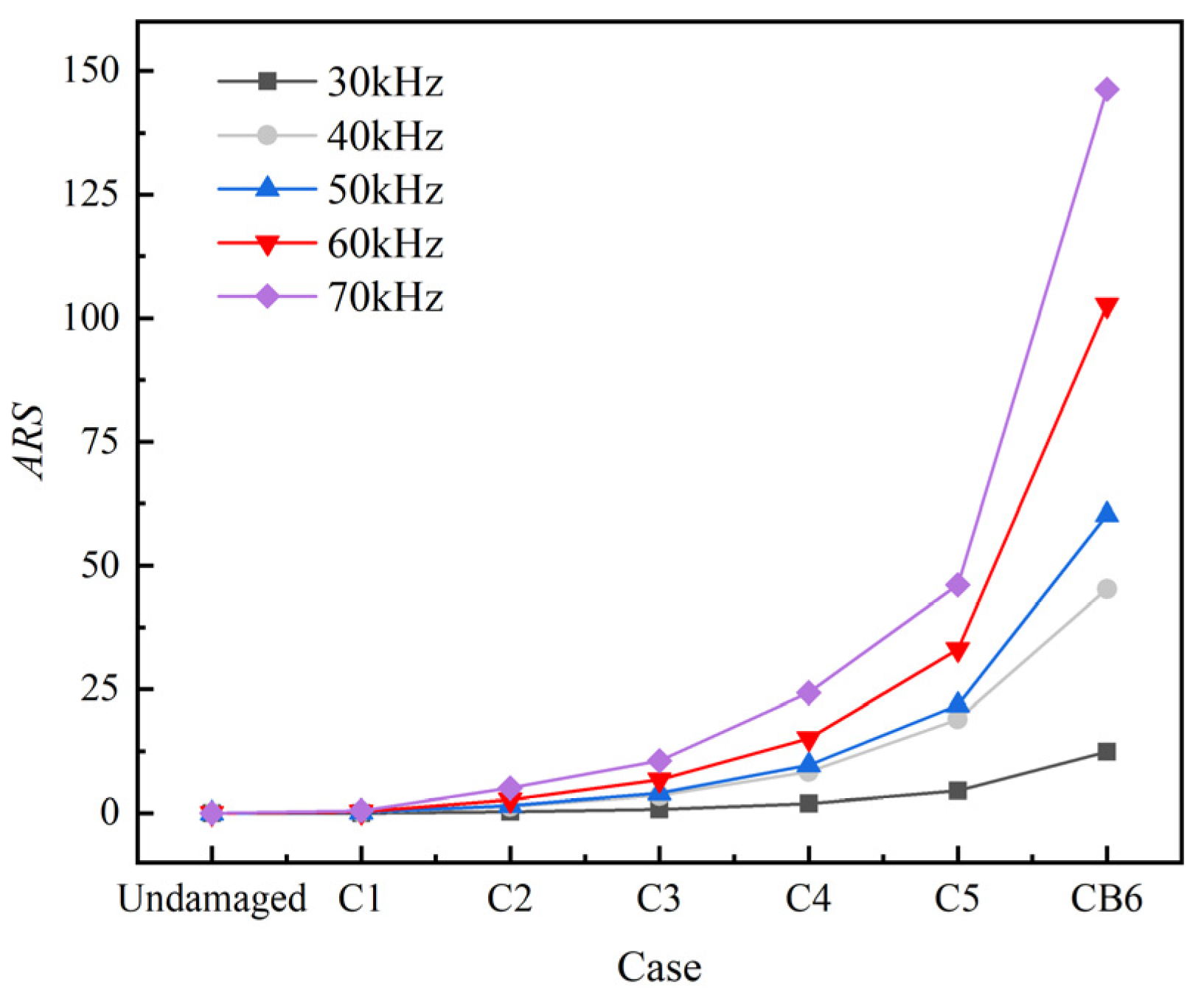
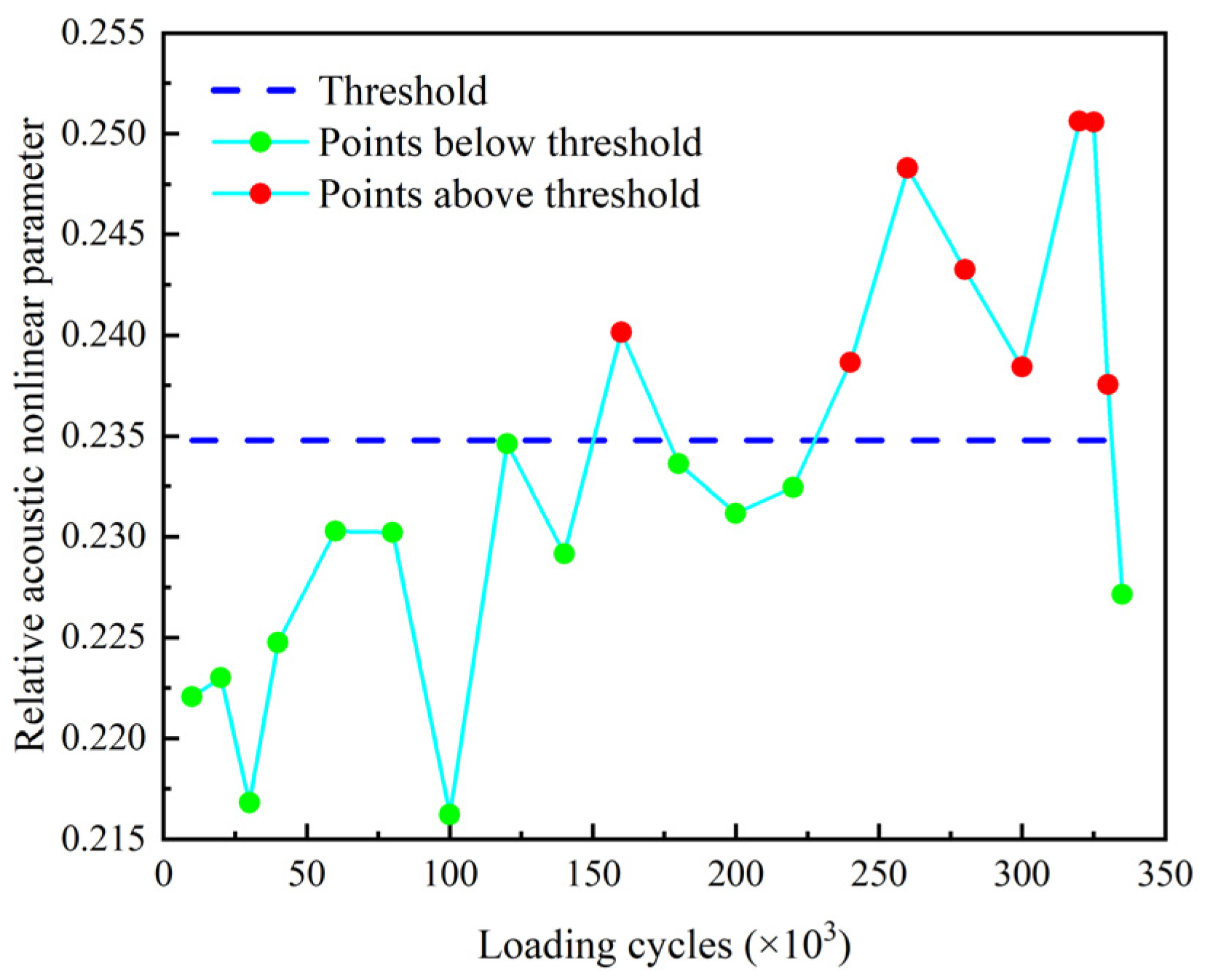
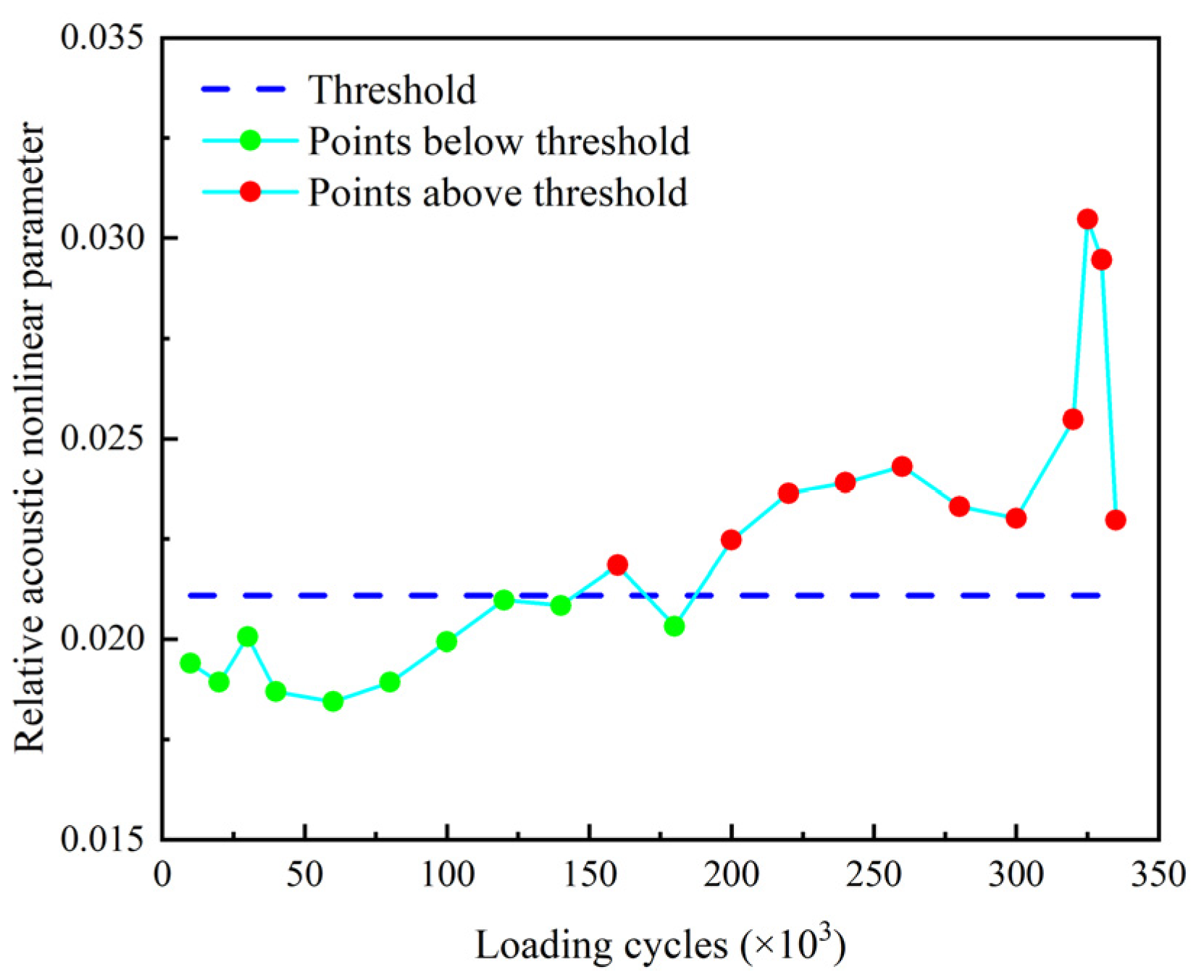
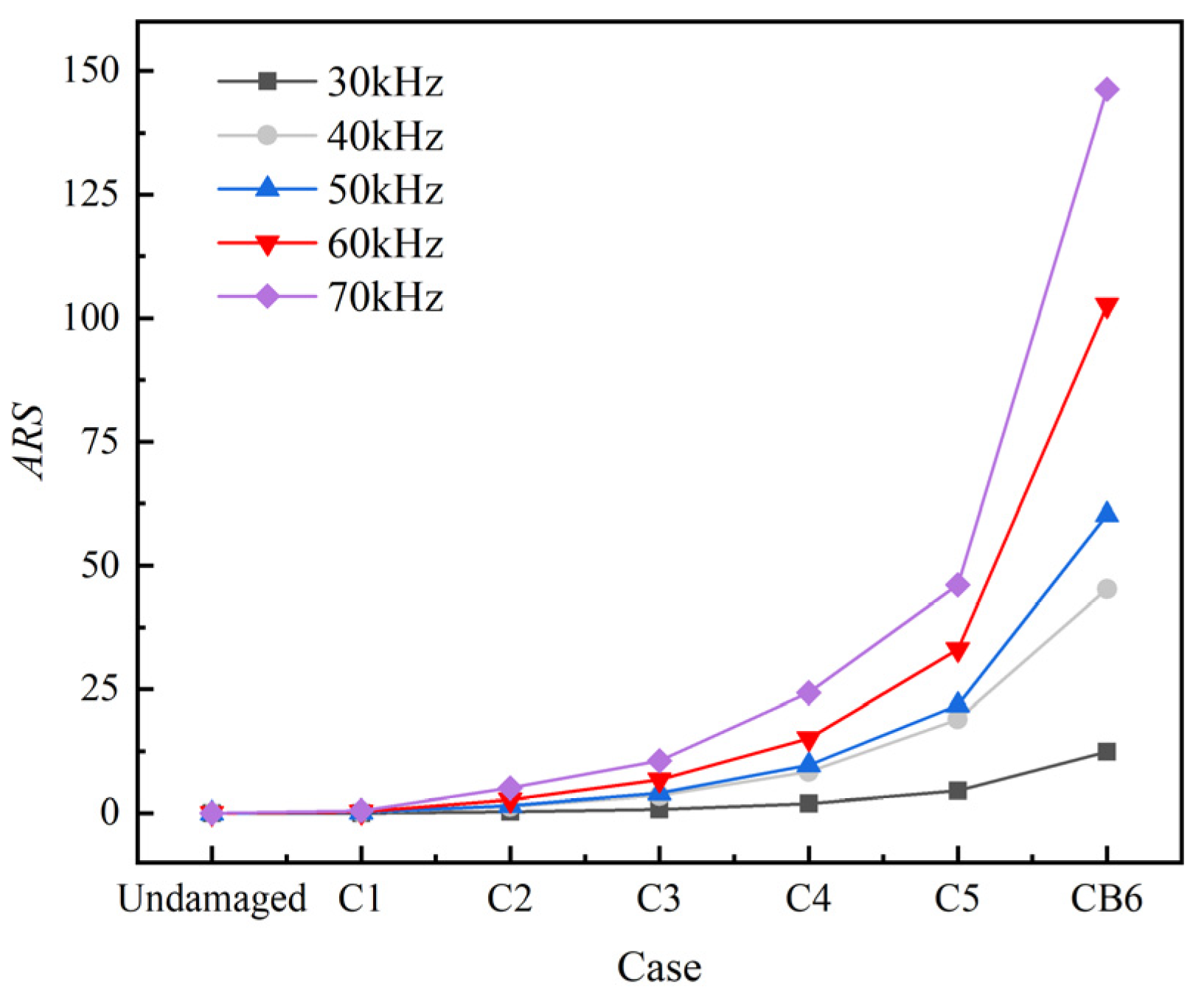
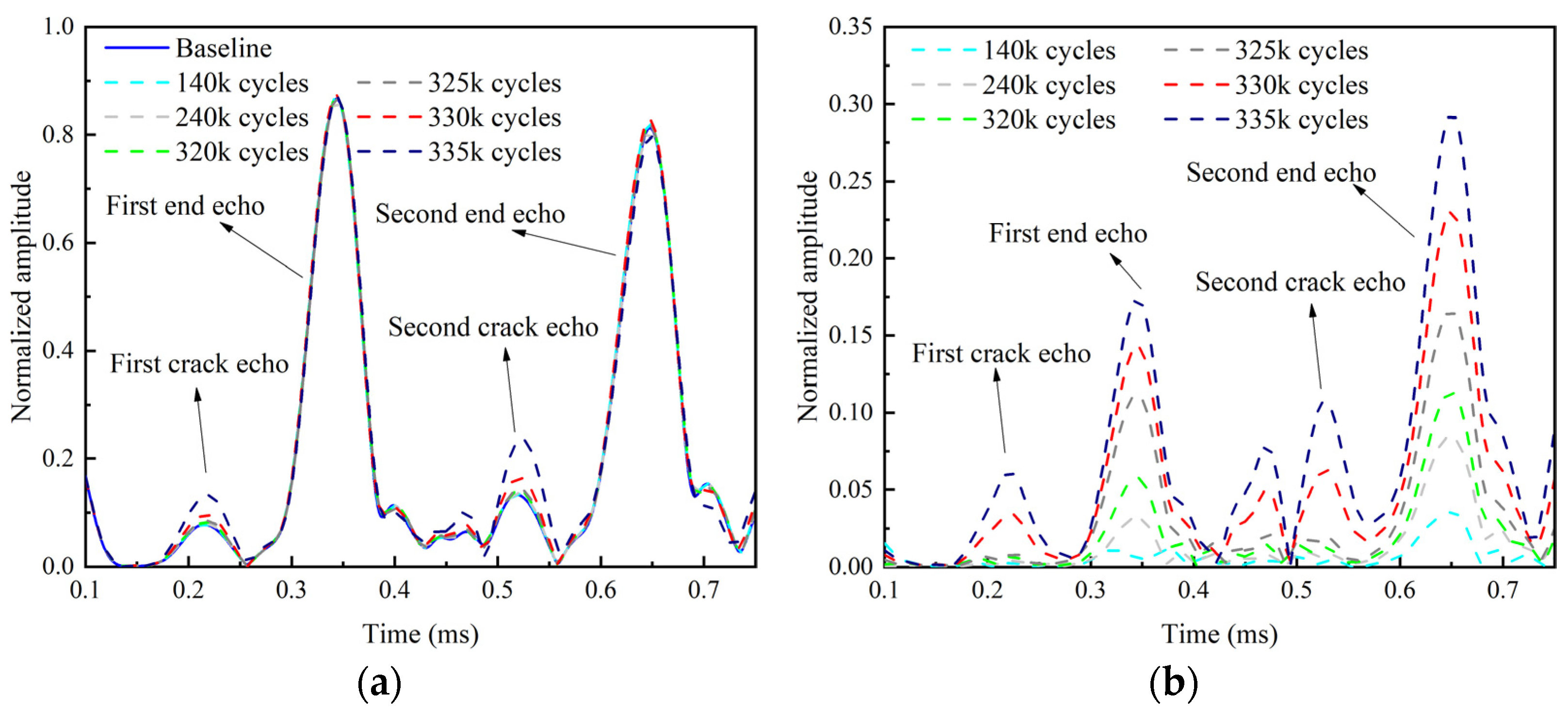
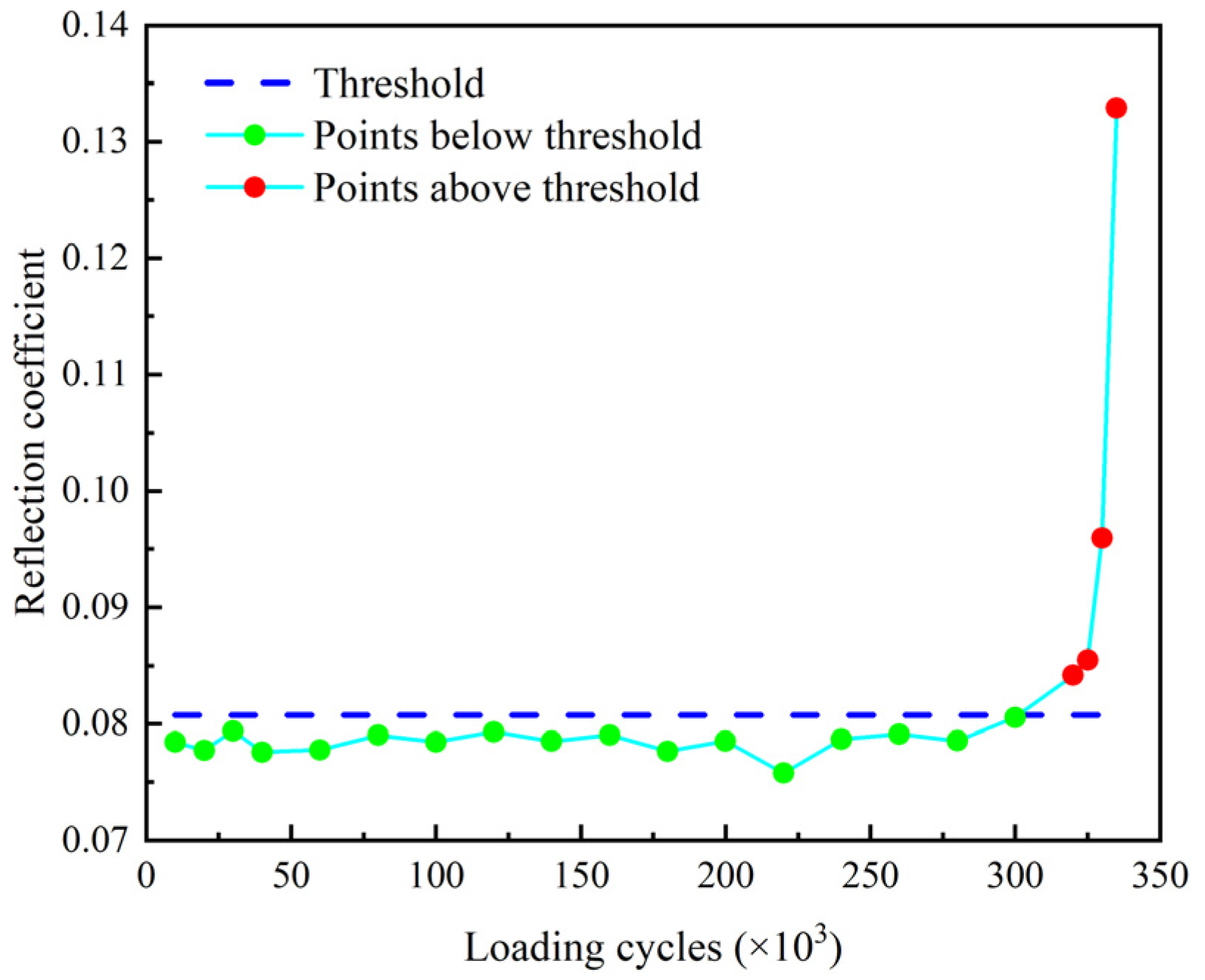
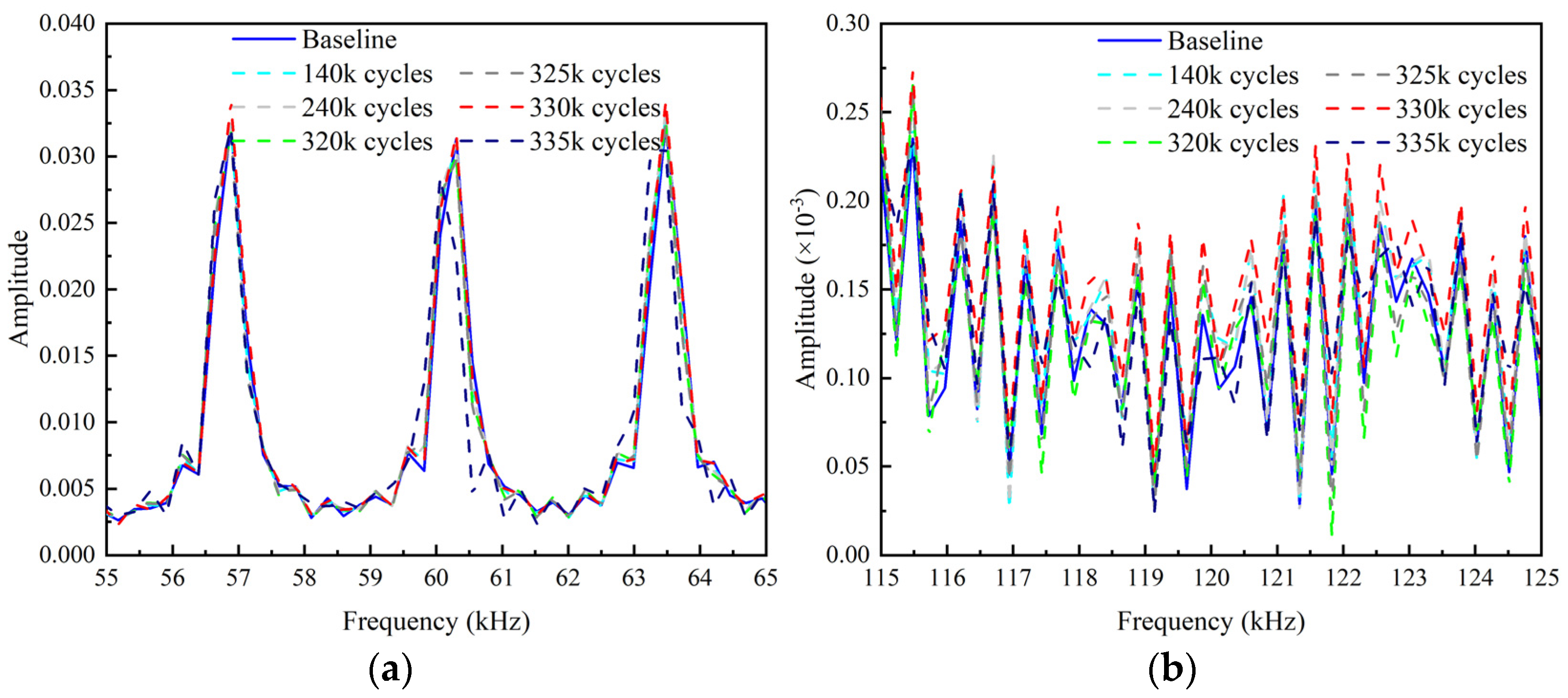
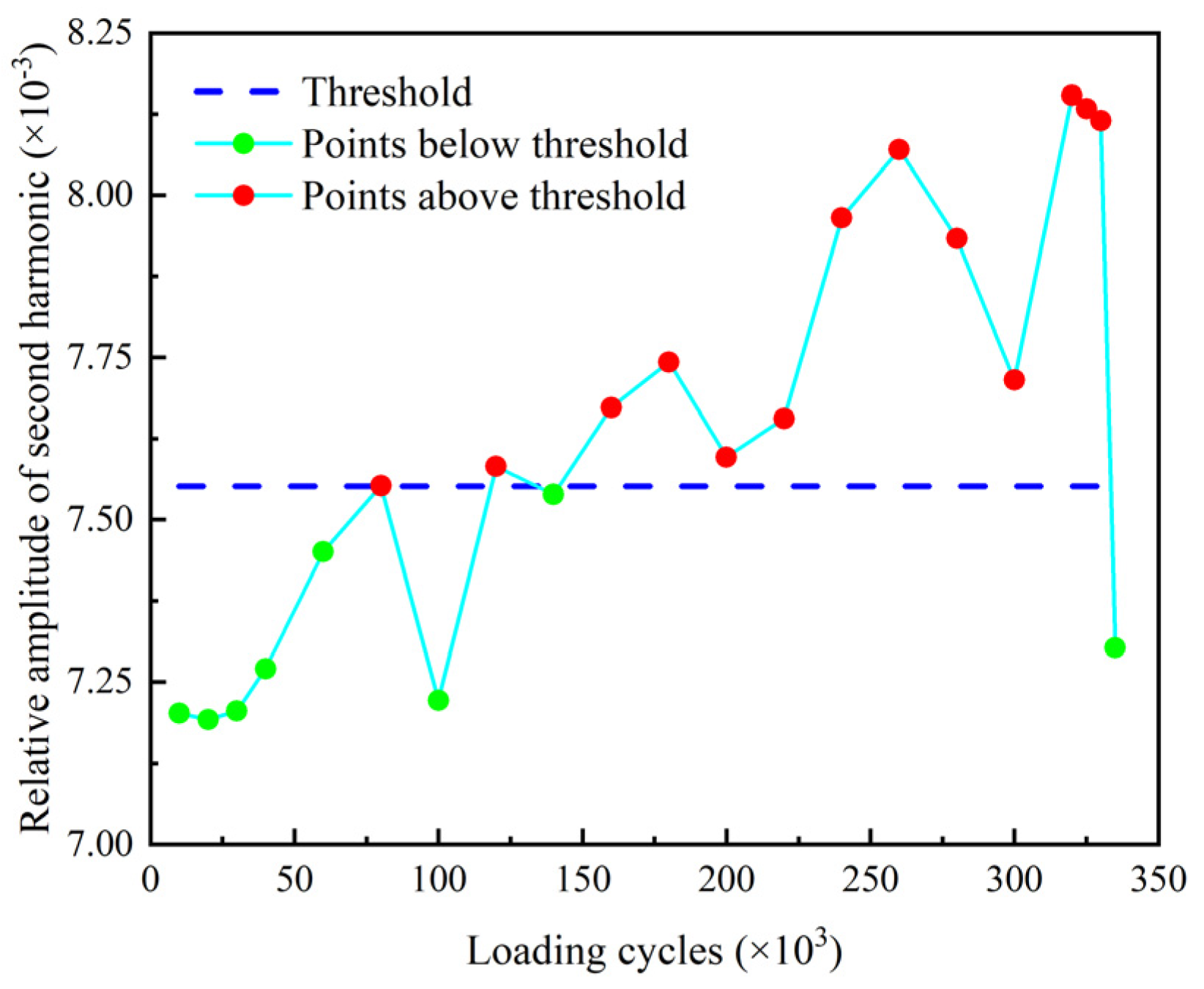
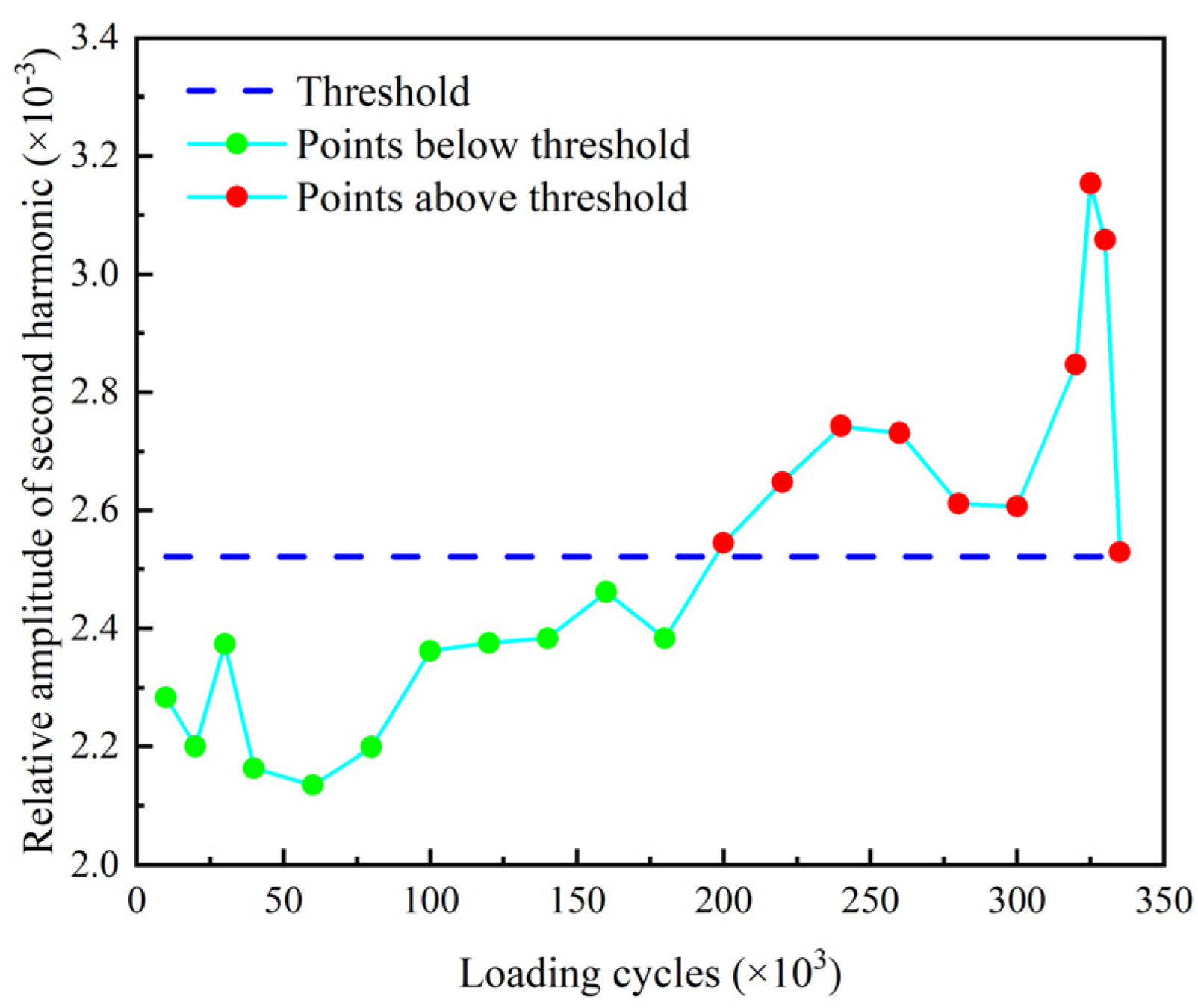
- The experiment on UGW-based fatigue crack detection of a threaded rod under cyclic tensile load shows that the reflection coefficient is able to warn the crack when it is visible and the accumulative residual squares ARS is able to warn the crack before it is visible. The spectrum-based nonlinear damage indexes, i.e., the relative amplitude of second harmonic and the relative acoustic nonlinear parameter , are generally able to give an earlier warning on the fatigue crack than the linear indexes and ARS.
- (4)
- Increasing the number of modulation cycles of excitation signals from 3 to 10 improves the stability of the nonlinear indexes and , and their sensibility to wider cracks.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Casanova, F.; Mantilla, C. Fatigue Failure of the Bolts Connecting a Francis Turbine with the Shaft. Eng. Fail. Anal. 2018, 90, 1–13. [Google Scholar] [CrossRef]
- Bakunov, A.S.; Kurozaev, V.P.; Kudryavtsev, D.A.; Bronnikov, V.K.; Kravchenko, V.G. Increasing the Reliability of Magnetic-Particle Testing by Means of a yM∧K-10 Automated Unit for Magnetic Fluorescent-Penetrant Inspection of Pipe End Faces. Russ. J. Nondestruct. Test. 2004, 40, 311–316. [Google Scholar] [CrossRef]
- The Chinese Society of NDT. Magnetic Particle Testing, 2nd ed.; China Machine Press: Beijing, China, 2004. [Google Scholar]
- Chen, G.; Zhang, W.; Zhang, Z.; Jin, X.; Pang, W. A New Rosette-like Eddy Current Array Sensor with High Sensitivity for Fatigue Defect around Bolt Hole in SHM. NDT E Int. 2018, 94, 70–78. [Google Scholar] [CrossRef]
- Im, K.-H.; Lee, S.-G.; Kim, H.-J.; Song, S.-J.; Woo, Y.-D.; Ra, S.-W.; Lee, H.-H. Experimental Approach and Simulation-Based Design of Eddy Current Sensors for Inspection of Vehicular Bolts. J. Korean Soc. Manuf. Technol. Eng. 2015, 24, 294–301. [Google Scholar] [CrossRef]
- Yao, Y.; Tung, S.-T.; Glisic, B. Crack Detection and Characterization Techniques-An Overview. Struct. Control Health Monit. 2014, 21, 1387–1413. [Google Scholar] [CrossRef]
- Klepka, A.; Staszewski, W.J.; Jenal, R.B.; Szwedo, M.; Iwaniec, J.; Uhl, T. Nonlinear Acoustics for Fatigue Crack Detection Experimental Investigations of Vibro-acoustic Wave Modulations. Struct. Health Monit. 2012, 11, 197–211. [Google Scholar] [CrossRef]
- Shifrin, E.I. Identification of a Finite Number of Small Cracks in a Rod Using Natural Frequencies. Mech. Syst. Signal Process. 2016, 70, 613–624. [Google Scholar] [CrossRef]
- Shifrin, E.I. Inverse Spectral Problem for a Non-uniform Rod with Multiple Cracks. Mech. Syst. Signal Process. 2017, 96, 348–365. [Google Scholar] [CrossRef]
- Tarunpreet, S.; Shankar, S. Damage Identification Using Vibration Monitoring Techniques. Mater. Today Proc. 2022. [Google Scholar] [CrossRef]
- Suh, D.M.; Kim, W.W. A New Ultrasonic Technique for Detection and Sizing of Small Cracks in Studs and Bolts. J. Nondestruct. Eval. 1995, 14, 201–206. [Google Scholar] [CrossRef]
- Wagle, S.; Kato, H. Ultrasonic Evaluation of Fatigue Crack Appearing at Bolt Joint of Aluminum Alloy Plate. In Proceedings of the JSME Annual Meeting, Tokyo, Janpan, 2 August 2008; pp. 443–444. [Google Scholar] [CrossRef]
- DL/T 694-2012; The Technical Guide of Ultrasonic Inspection for High-temperature Tight Bolts. China Electric Power Press: Beijing, China, 2012.
- Wei, S. Study on Ultrasonic Guided Wave Testing Technology for Wind Power Bolts. Master Thesis, Hubei University of Technology, Wuhan, China, 2021. (In Chinese). [Google Scholar]
- Mitra, M.; Gopalakrishnan, S. Guided Wave Based Structural Health Monitoring: A Review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- He, C.; Zheng, M.; Lv, Y.; Deng, P.; Zhao, H.; Liu, X.; Song, G.; Liu, Z.; Jiao, J.; Wu, B. Development, Applications and Challenges in Ultrasonic Guided Waves Testing Technology. Chin. J. Sci. Instrum. 2016, 37, 1713–1735. [Google Scholar] [CrossRef]
- Niu, X.; Marques, H.R.; Chen, H.P. Sensitivity Analysis of Circumferential Transducer Array with T(0,1) Mode of Pipes. Smart Struct. Syst. 2018, 21, 761–776. [Google Scholar] [CrossRef]
- Garg, M.; Sharma, S.; Sharma, S.; Mehta, R. Non-contact Damage Monitoring Technique for FRP Laminates Using Guided Waves. Smart Struct. Syst. 2016, 17, 795–817. [Google Scholar] [CrossRef]
- Schaal, C.; Bischoff, S.; Gaul, L. Damage Detection in Multi-wire Cables Using Guided Ultrasonic Waves. Struct. Health Monit. 2016, 15, 279–288. [Google Scholar] [CrossRef]
- Wang, K.; Cao, W.; Su, Z.; Wang, P.; Zhang, X.; Chen, L.; Guan, R.; Lu, Y. Structural Health Monitoring of High-speed Railway Tracks Using Diffuse Ultrasonic Wave-based Condition Contrast: Theory and Validation. Smart Struct. Syst. 2020, 26, 227–239. [Google Scholar] [CrossRef]
- Shoji, M.; Higashi, Y. Fundamental Study on Guided Wave Testing of Cylindrical Bars Embedded in Soil. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 1404–1407. [Google Scholar] [CrossRef]
- Shoji, M.; Hirata, A. Ultrasonic Guided Wave Testing of Anchor Rods Embedded in Soil. In Proceedings of the 2016 IEEE International Ultrasonics Symposium, Tours, Frace, 18–21 September 2016. [Google Scholar]
- Stepinski, T. Time-Frequency Analysis of Guided Ultrasonic Waves Used for Assessing Integrity of Rock Bolts. In Smart Materials and Nondestructive Evaluation for Energy Systems; SPIE: Portland, OR, USA, 2017; Volume 10171, p. 101710J1-10. [Google Scholar] [CrossRef]
- Rong, X.; Lin, P.; Liu, J.; Yang, T. A New Approach of Waveform Interpretation Applied in Nondestructive Testing of Defects in Rock Bolts Based on Mode Identification. Math. Probl. Eng. 2017, 2017, 7920649. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Durham, N.; Abdel-Hadi, K.; McKenzie, C.A.; Thomson, D.J. Acoustic Guided Wave Techniques for Detecting Corrosion Damage of Electrical Grounding Rods. Measurement 2019, 147, 106858. [Google Scholar] [CrossRef]
- Amjad, U.; Yadav, S.K.; Kundu, T. Detection and Quantification of Diameter Reduction Due to Corrosion in Reinforcing Steel Bars. Struct. Health Monit. 2015, 14, 532–543. [Google Scholar] [CrossRef]
- He, C.; Sun, Y.; Wu, B.; Wang, X.; Liu, Z. Application of Ultrasonic Guided Waves Technology to Inspection of Bolt Embedded in Soils. Chin. J. Geotech. Eng. 2006, 28, 1144–1147. [Google Scholar]
- Beard, M.D.; Lowe, M.J.S.; Cawley, P. Development of a Guided Wave Inspection Technique for Rock Bolts. AIP Conf. Proc. 2002, 615, 1318–1325. [Google Scholar] [CrossRef]
- Tsai, Y.; Liu, S.; Light, G. Crack-Depth Effects in the Cylindrically Guided Wave Technique for Bolt and Pump-Shaft Inspections. Nucl. Eng. Des. 1992, 133, 77–80. [Google Scholar] [CrossRef]
- Du, Y.; Ouyang, Q.; Zhou, F. Study on Stress Concentration Factor of Bolt Screw. Eng. Mech. 2014, 31, 174–180. [Google Scholar]
- Su, Z.; Zhou, C.; Hong, M.; Cheng, L.; Wang, Q.; Qing, X. Acousto-Ultrasonics-Based Fatigue Damage Characterization: Linear versus Nonlinear Signal Features. Mech. Syst. Signal Process. 2014, 45, 225–239. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Hayashi, T.; Song, W.-J.; Rose, J.L. Guided Wave Dispersion Curves for a Bar with an Arbitrary Cross-Section, a Rod and Rail Example. Ultrasonics 2003, 41, 175–183. [Google Scholar] [CrossRef]
- Wu, B.; Qi, W.; He, C.; Zhou, J. Recognition of Defects on Steel Rod Using Ultrasonic Guided Waves Based on Neural Network. Eng. Mech. 2013, 30, 470–476. [Google Scholar]
- Jhang, K.-Y. Nonlinear Ultrasonic Techniques for Nondestructive Assessment of Micro Damage in Material: A Review. Int. J. Precis. Eng. Manuf. 2009, 10, 123–135. [Google Scholar] [CrossRef]
- Broda, D.; Staszewski, W.J.; Martowicz, A.; Uhl, T.; Silberschmidt, V.V. Modelling of Nonlinear Crack-Wave Interactions for Damage Detection Based on Ultrasound—A Review. J. Sound Vib. 2014, 333, 1097–1118. [Google Scholar] [CrossRef]
- Solodov, I.Y.; Krohn, N.; Busse, G. CAN: An Example of Nonclassical Acoustic Nonlinearity in Solids. Ultrasonics 2002, 40, 621–625. [Google Scholar] [CrossRef]
- Lee, Y.F.; Lu, Y.; Guan, R. Nonlinear Guided Waves for Fatigue Crack Evaluation in Steel Joints with Digital Image Correlation Validation. Smart Mater. Struct. 2020, 29, 035031. [Google Scholar] [CrossRef]
- Wang, K.; Li, Y.; Su, Z.; Guan, R.; Lu, Y.; Yuan, S. Nonlinear Aspects of “Breathing” Crack-Disturbed Plate Waves: 3-D Analytical Modeling with Experimental Validation. Int. J. Mech. Sci. 2019, 159, 140–150. [Google Scholar] [CrossRef]
- Smith, M. ABAQUS/Standard User’s Manual, Version 6.9; Dassault Systèmes Simulia Corp: Providence, RI, USA, 2009. [Google Scholar]
- Moser, F.; Jacobs, L.J.; Qu, J. Modeling Elastic Wave Propagation in Waveguides with the Finite Element Method. NDT E Int. 1999, 32, 225–234. [Google Scholar] [CrossRef]
- Datta, D.; Kishore, N.N. Features of Ultrasonic Wave Propagation to Identify Defects in Composite Materials Modelled by Finite Element Method. NDT E Int. 1996, 29, 213–223. [Google Scholar] [CrossRef]
- Alleyne, D.; Cawley, P. A Two-Dimensional Fourier Transform Method for the Measurement of Propagating Multimode Signals. J. Acoust. Soc. Am. 1991, 89, 1159–1168. [Google Scholar] [CrossRef]
- Zheda Jingyi. Available online: http://www.jingyitech.com/ (accessed on 13 November 2021).
- Hernandez-Salazar, C.D.; Herrejon, A.B.; Sanchez, J.I.A. Damage Detection in Multi-Wire Cables Using Continuous Wavelet Transform Analysis of Ultrasonic Guided Waves. In Proceedings of the 2009 Electronics, Robotics and Automotive Mechanics Conference (CERMA), Cernavaca, Mexico, 22–25 September 2009; pp. 250–255. [Google Scholar] [CrossRef]
- Tu, J.Q.; Tang, Z.F.; Yun, C.B.; Wu, J.J.; Xu, X. Guided Wave-based Damage Assessment on Welded Steel I-beam under Ambient Temperature Variations. Struct. Control Health Monit. 2021, 28, e2696. [Google Scholar] [CrossRef]
- Zhang, P.F.; Tang, Z.F.; Duan, Y.F.; Yun, C.B.; Lv, F.Z. Ultrasonic Guided Wave Approach Incorporating SAFE for Detecting Wire Breakage in Bridge Cable. Smart Struct. Syst. 2018, 22, 481–493. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
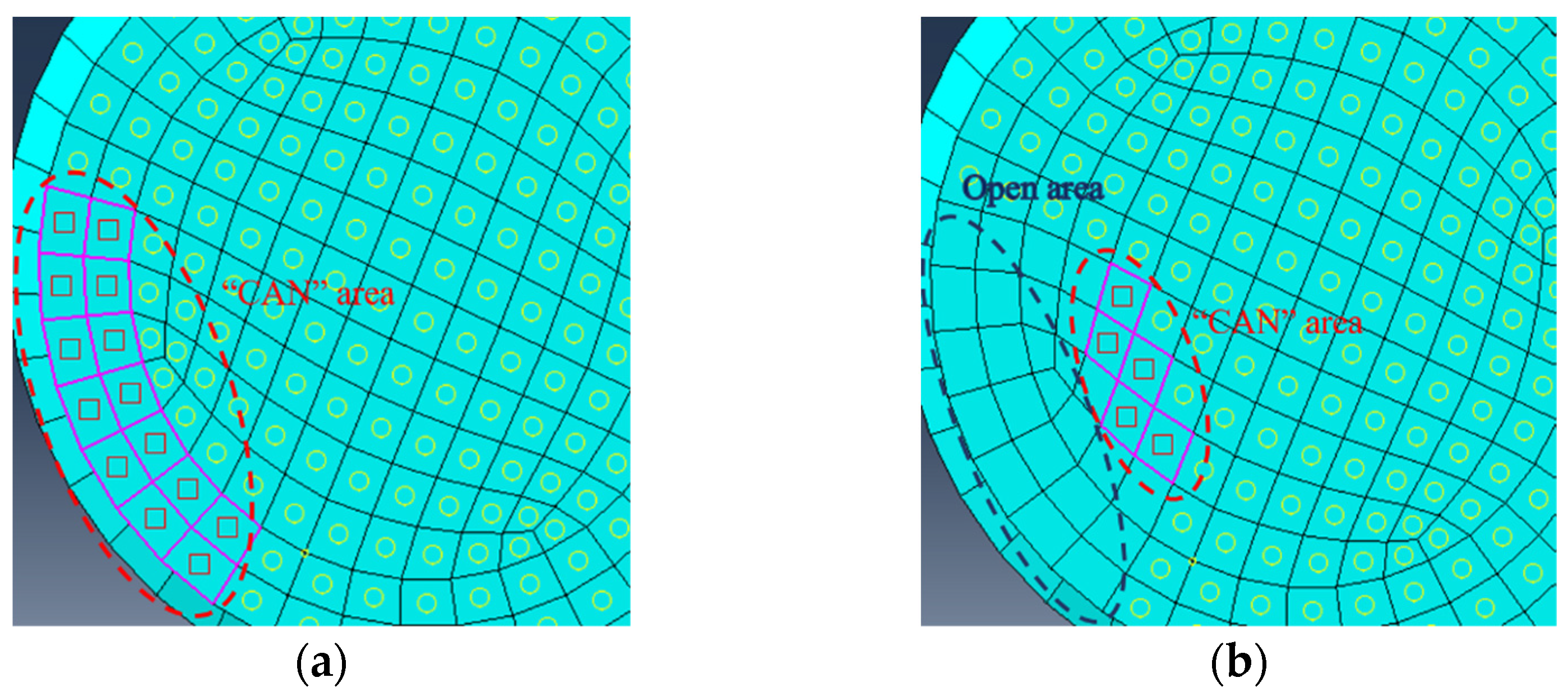
| Working Condition | C1 | C2 | C3 | C4 | C5 | CB6 |
|---|---|---|---|---|---|---|
| “CAN” area (mm2) | 11.1 | 26.1 | 36.5 | 49.2 | 66.9 | 11.1 |
| Separated area (mm2) | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 55.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, K.; Zhang, Y.; Xu, X.; Han, J.; Luo, Y. Crack Detection of Threaded Steel Rods Based on Ultrasonic Guided Waves. Sensors 2022, 22, 6885. https://doi.org/10.3390/s22186885
Peng K, Zhang Y, Xu X, Han J, Luo Y. Crack Detection of Threaded Steel Rods Based on Ultrasonic Guided Waves. Sensors. 2022; 22(18):6885. https://doi.org/10.3390/s22186885
Chicago/Turabian StylePeng, Kunhong, Yi Zhang, Xian Xu, Jinsong Han, and Yaozhi Luo. 2022. "Crack Detection of Threaded Steel Rods Based on Ultrasonic Guided Waves" Sensors 22, no. 18: 6885. https://doi.org/10.3390/s22186885
APA StylePeng, K., Zhang, Y., Xu, X., Han, J., & Luo, Y. (2022). Crack Detection of Threaded Steel Rods Based on Ultrasonic Guided Waves. Sensors, 22(18), 6885. https://doi.org/10.3390/s22186885