
QoS Aware and Fault Tolerance Based Software-Defined Vehicular Networks Using Cloud-Fog Computing

 , , , , , ,
, , , , , ,  ,
,  and
and 
Abstract
:1. Introduction
Contributions
- A new architecture is proposed based on SDVN; fog nodes are used instead of cloud computing to reduce response time.
- Response time is considered in the proposed model, which is an important QoS parameter of the vehicles messages/tasks/data.
- Fault-tolerance-based architecture is provided to reduce tasks/messages failure ratio.
- Message priority is calculated based on the nature of messages instead of deadline and size, as several highest/critical messages have more size, but its nature remains critical/urgent.
2. Literature Review
2.1. VANET Models
2.2. SDN-Based Models
2.3. SDVN-Based Models
2.4. Scheduling SDVN Models
- Response time of messages/data need to reduce
- Fault tolerance mechanism should be used to reduce tasks/messages failure ratio
- Mobility aware protocols need to develop for SDVN communications
- Cache-based scheduling algorithms needed to reduce energy consumption
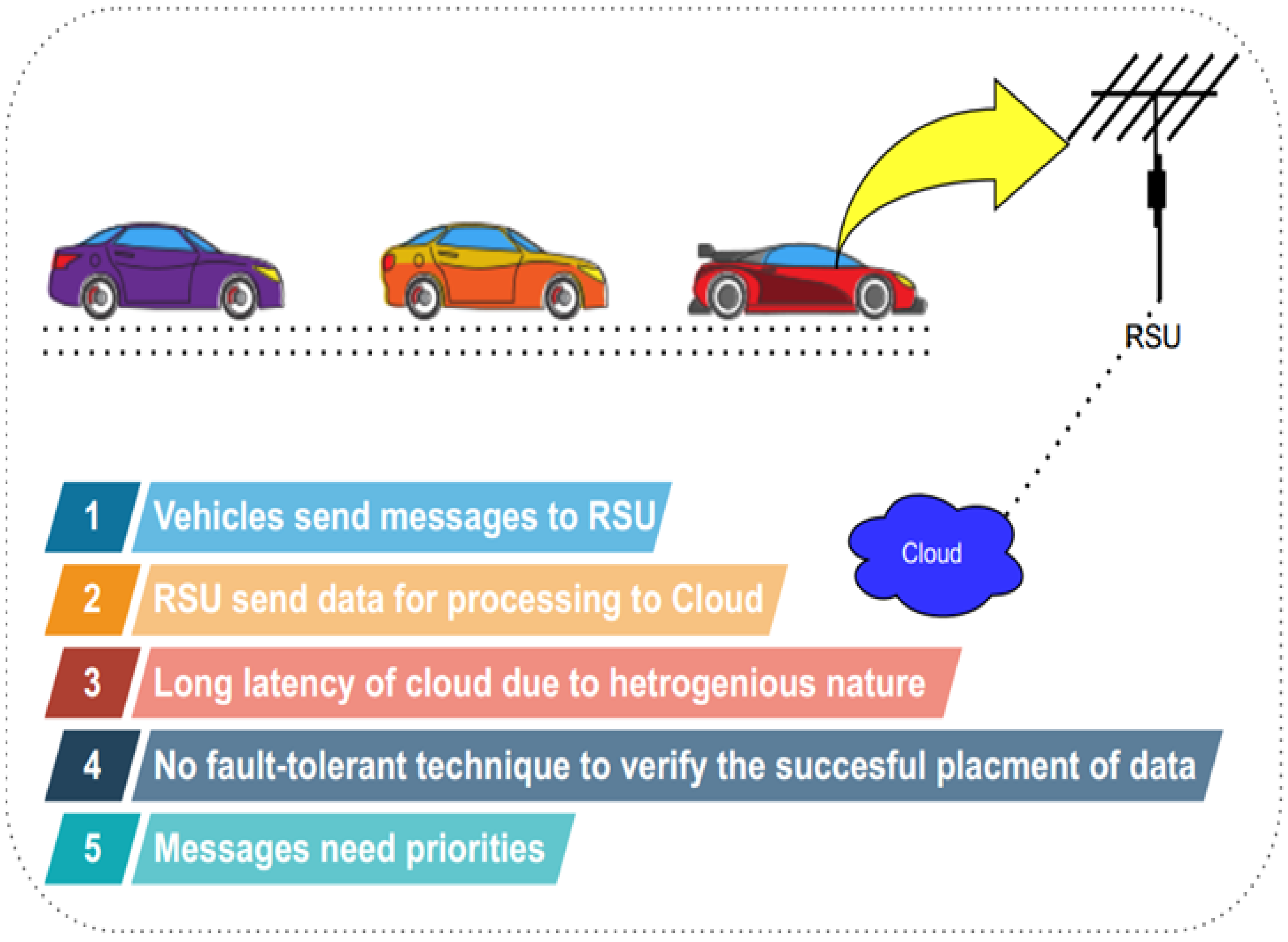
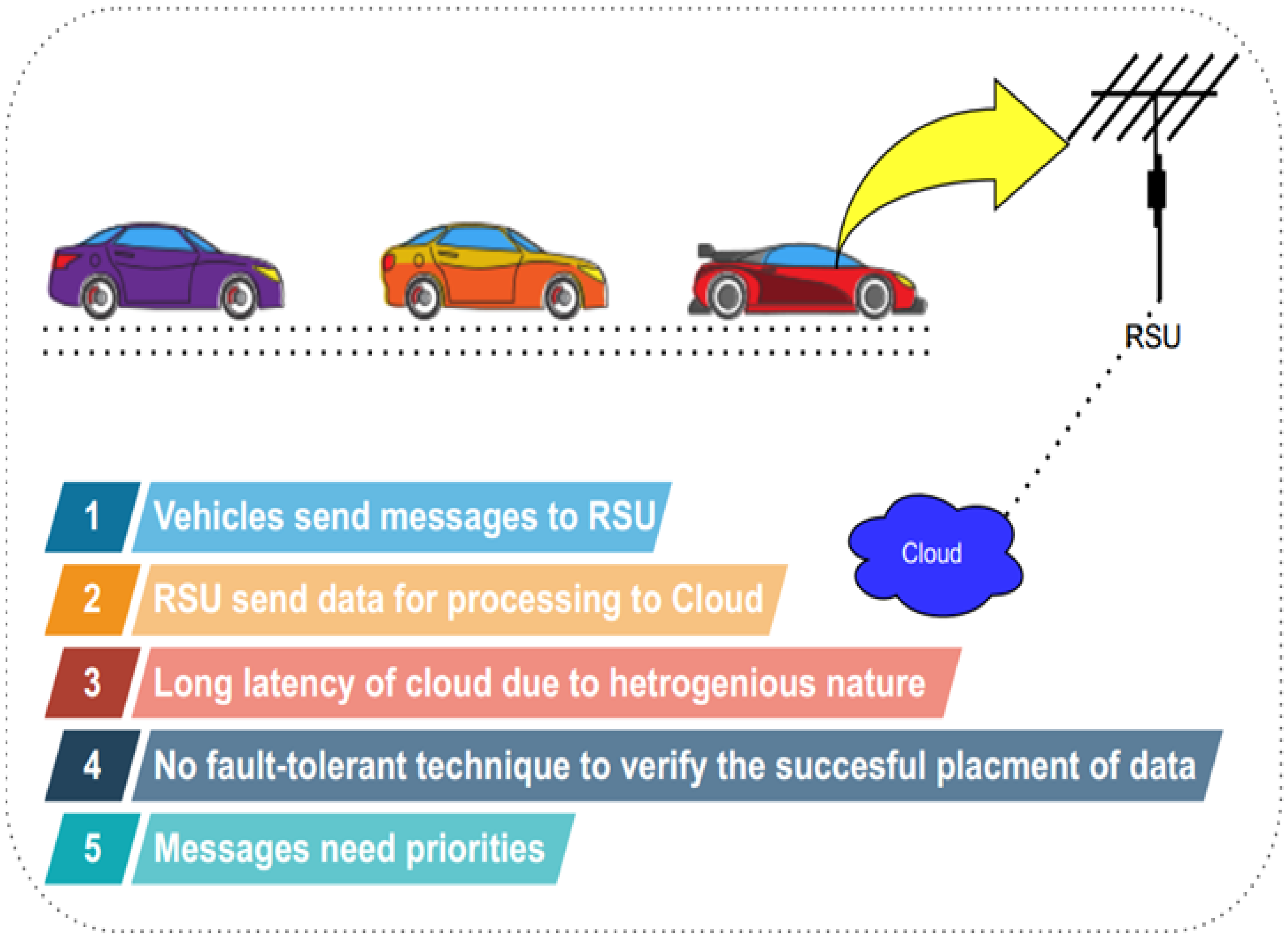
3. Problem Formulation
- Response time is not provided for the safety and non-safety messages of vehicles
- Cloud is used for task execution, which leads to higher response time
- Safety messages are given priority based on deadline and size, but not given priority based on message nature, as some messages are large in size, but have the highest priority.
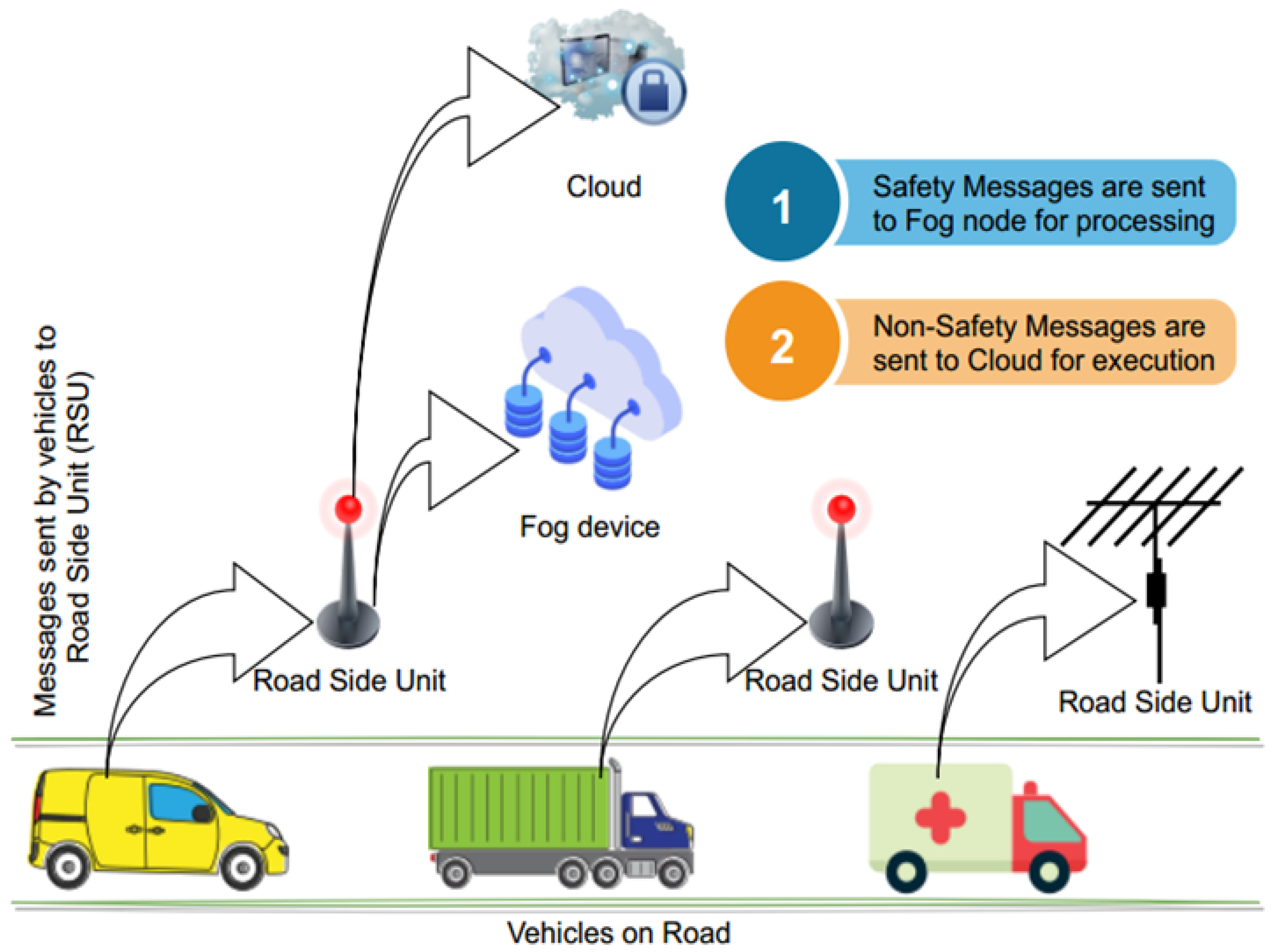
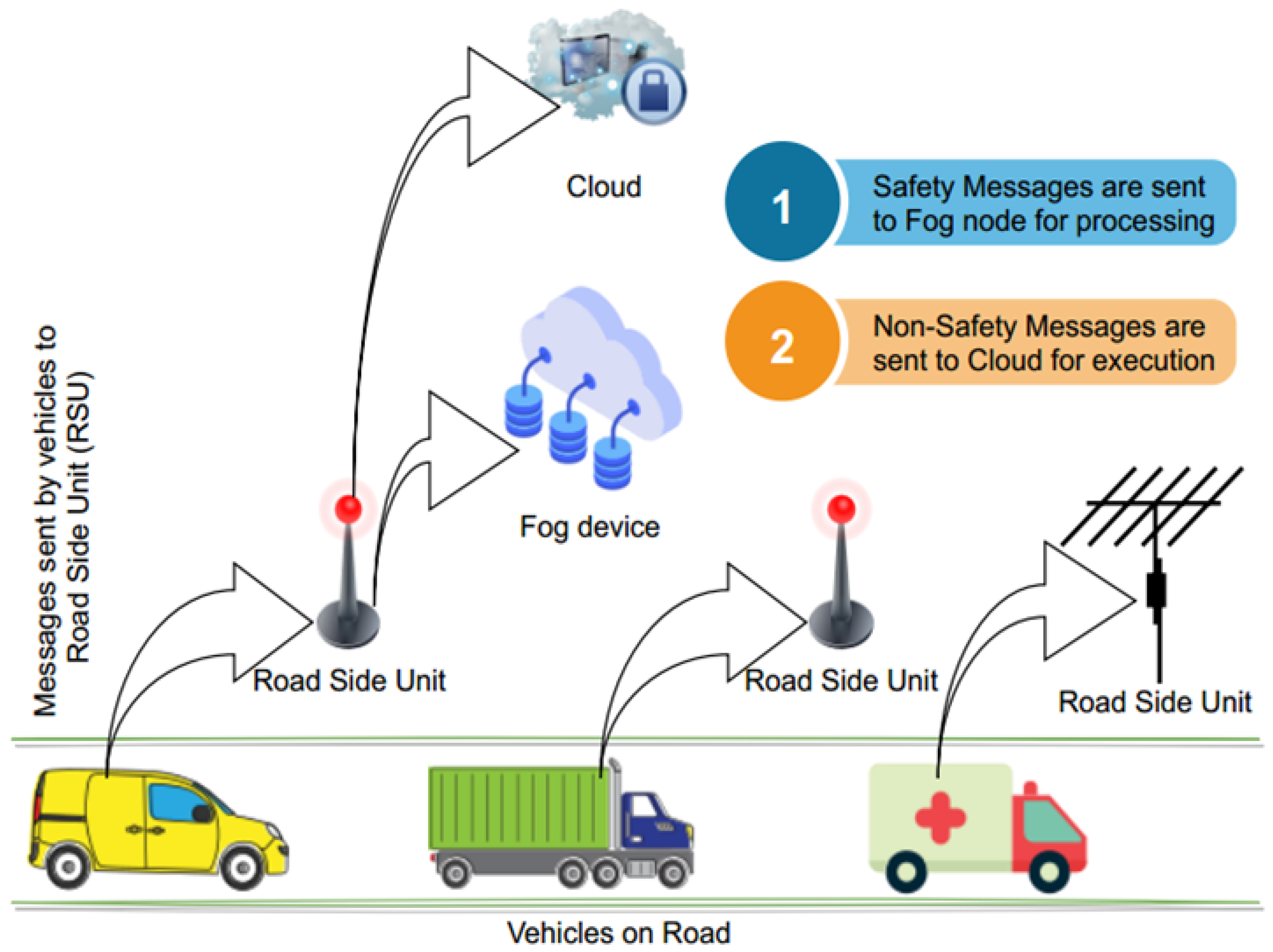
4. Proposed Solution
4.1. System Architecture
4.2. SDN Based Smart Gateway
4.3. VANET Vehicles
4.3.1. SDN Controller
4.3.2. Fog Nodes
4.3.3. Cloud Datacenter
4.4. QAFT-SDVN Proposed Model
| Algorithm 1: Vehicles Messages receiving and priority allocation based on message nature |
| Input: (Vehicles Messages) Output: & (Messages Priorities)
|
| Algorithm 2: Vehicles Messages receiving and priority allocation based on deadline and size |
| Input: (Vehicles Messages) Output: & (Messages Priorities)
|
| Algorithm 3: Messages forwarding to vehicles for information and cloud |
| Input: & (Two list one of safety messages while the other one of non-safety messages) Output: Sending messages receipt and database storage
|
| Algorithm 4: Fault-Tolerance Mechanism for SDVN |
| Input: & (Two list one of safety messages while the other one of non-safety messages) Output: £ (Successful messages)
|
5. Simulation Setup and Results
5.1. Resource Modeling
5.2. Application Modeling
5.3. Simulation Process
5.4. Performance Parameters
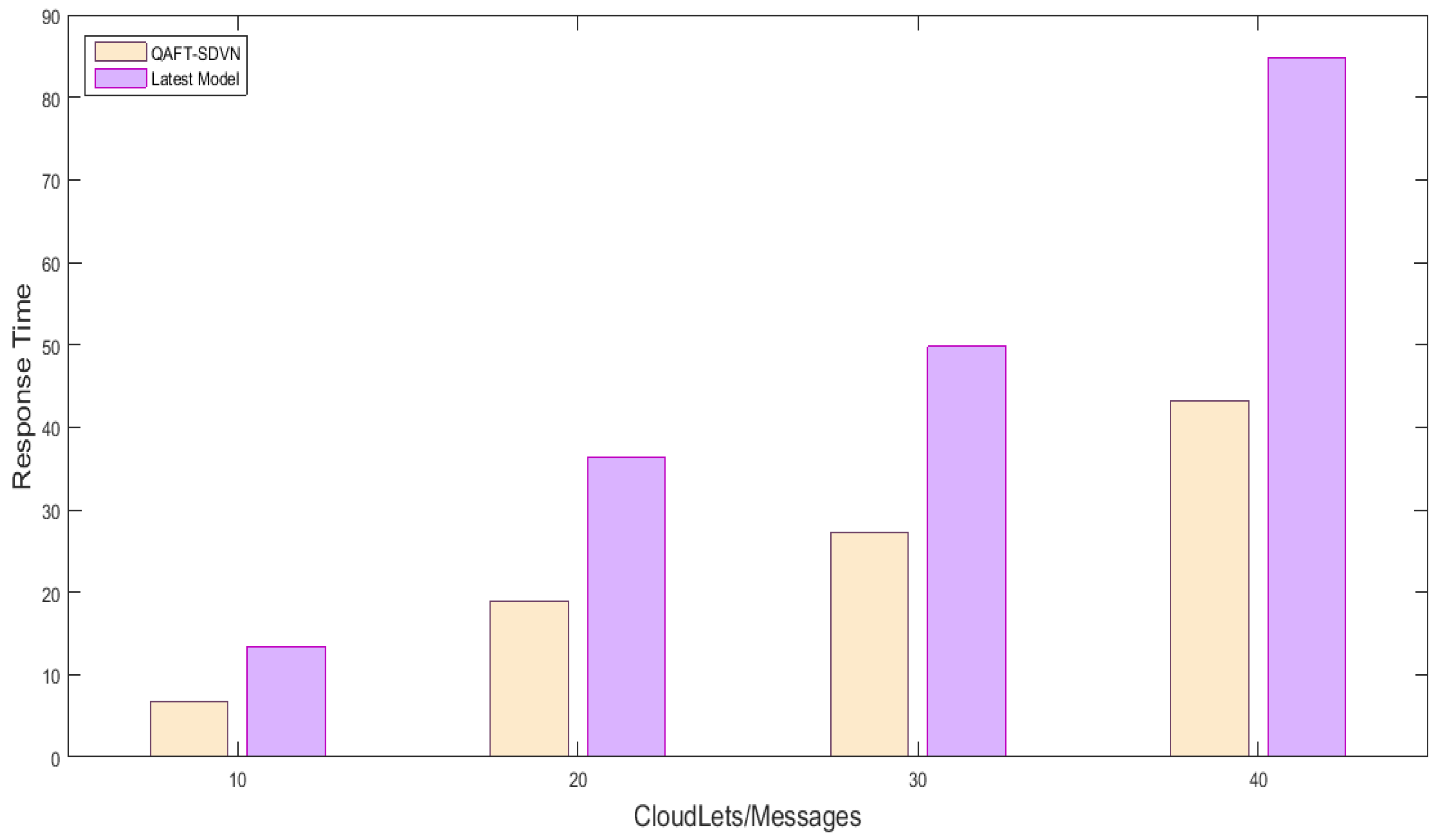
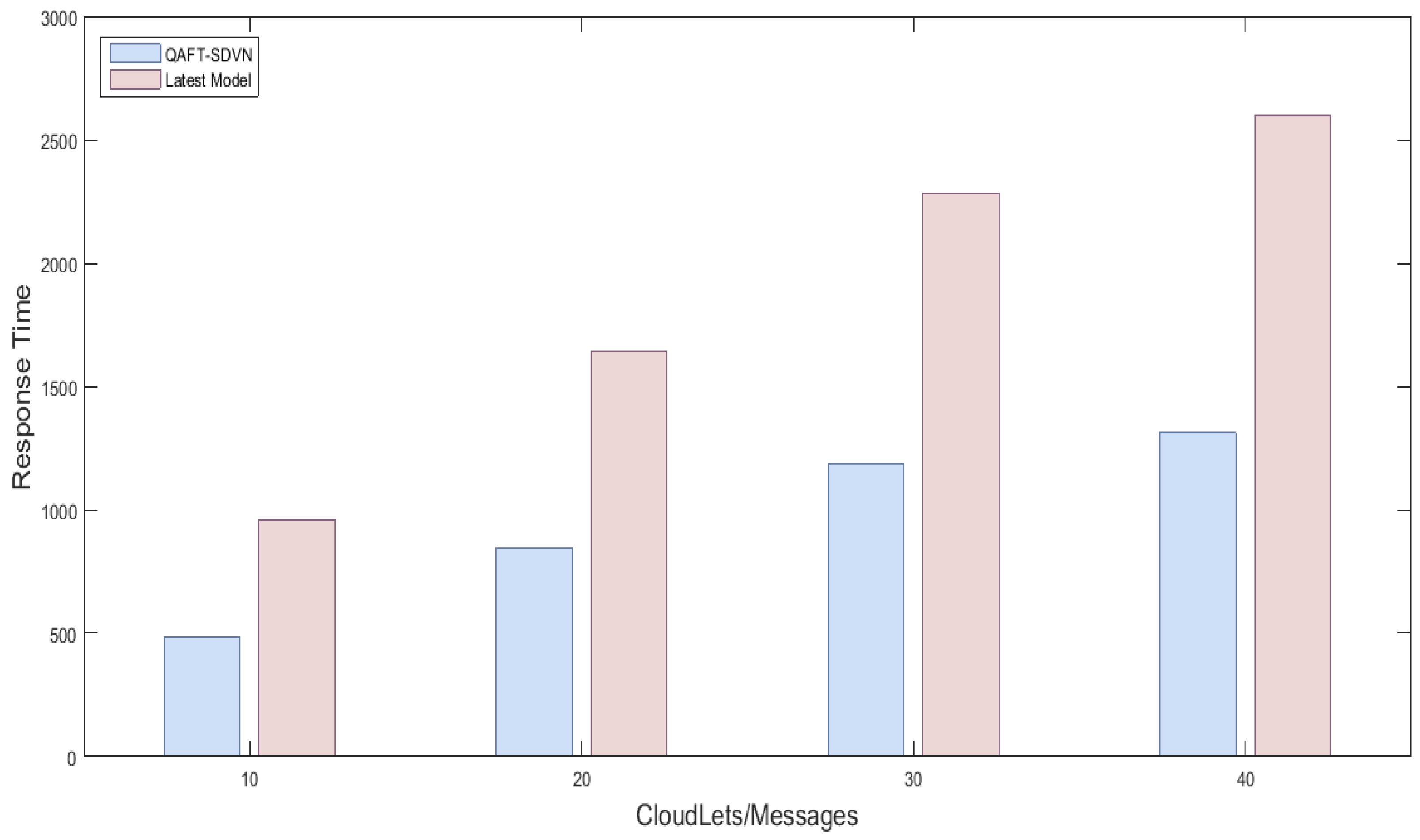
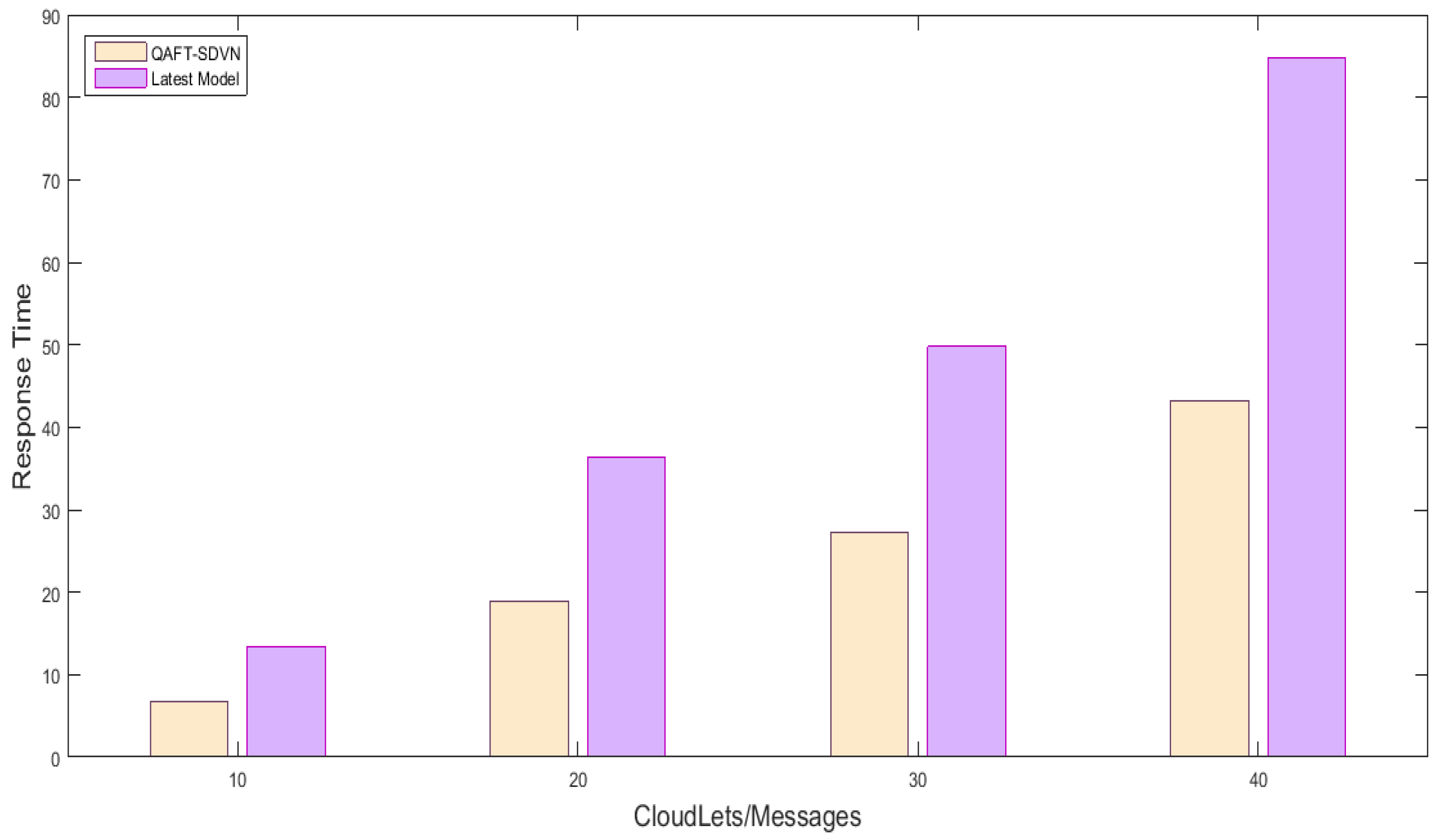
5.4.1. Response Time
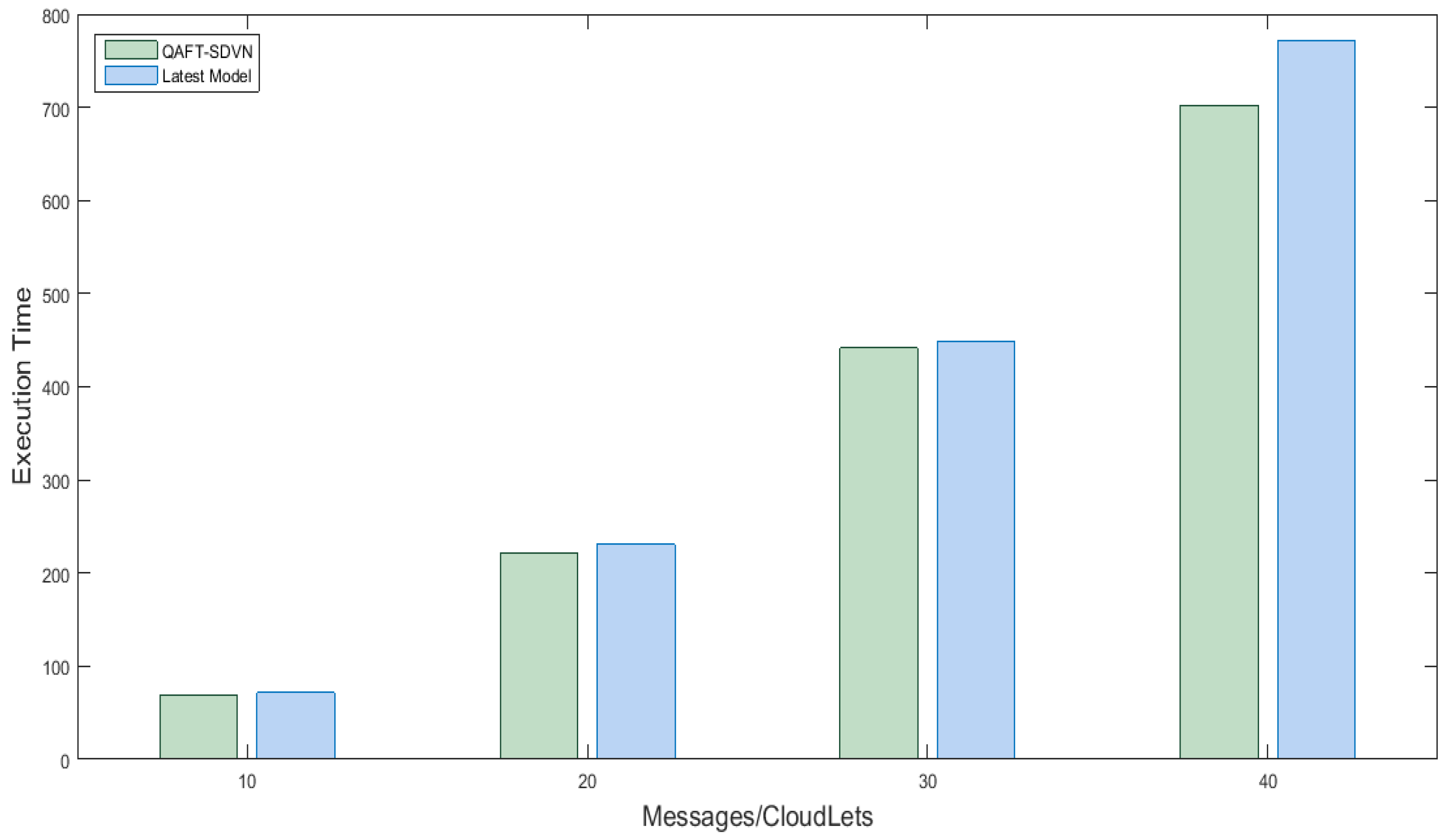
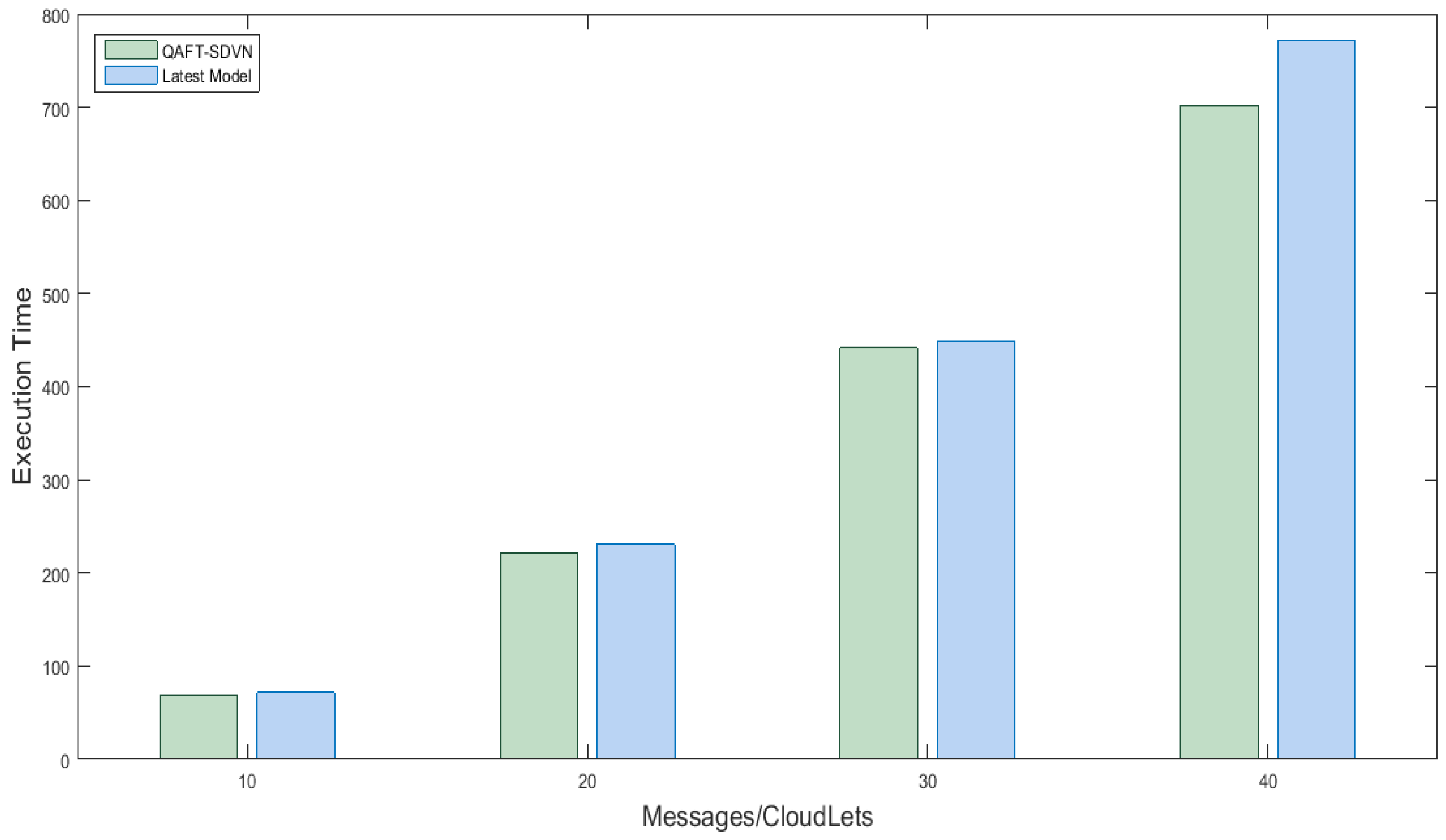
5.4.2. Execution Time
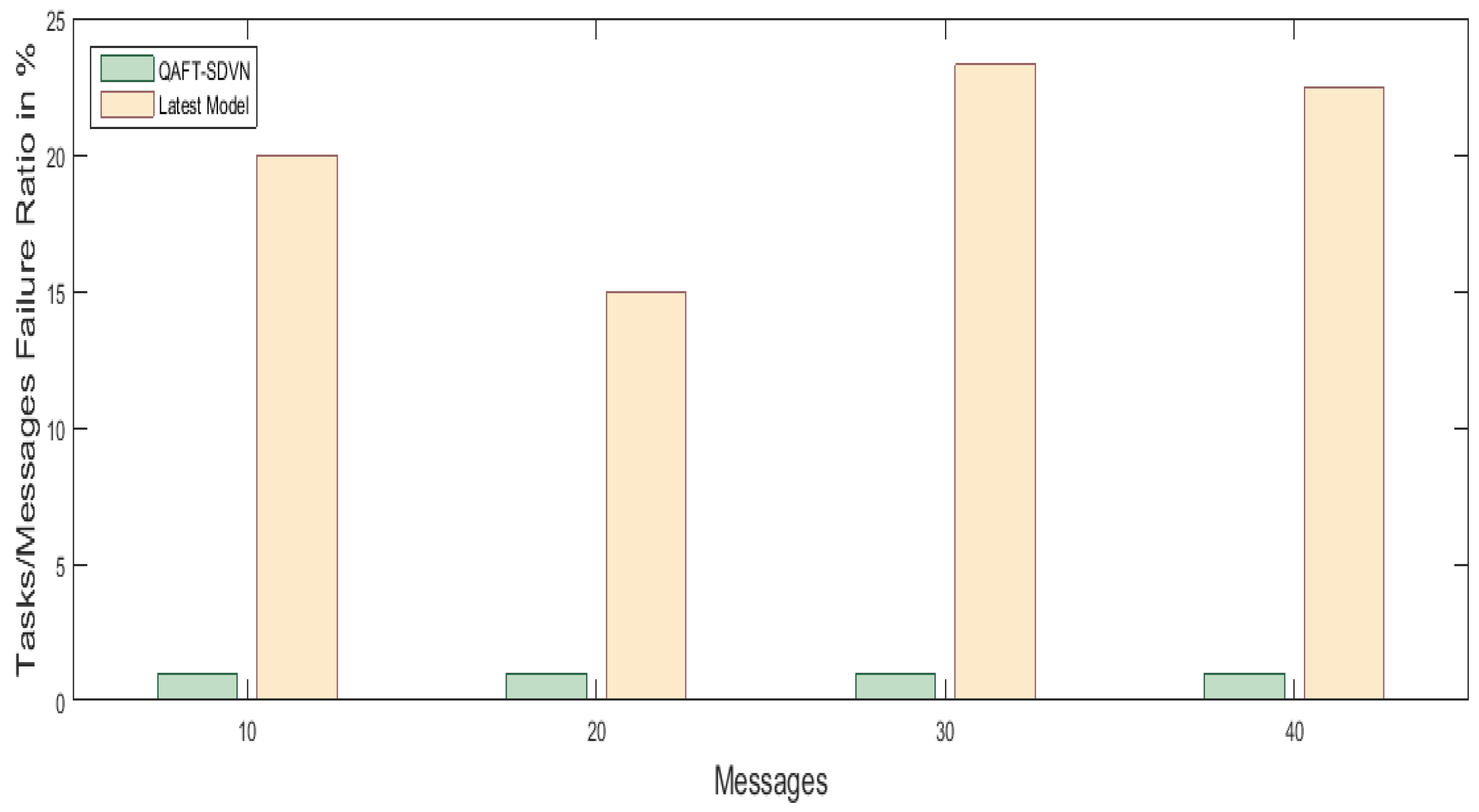
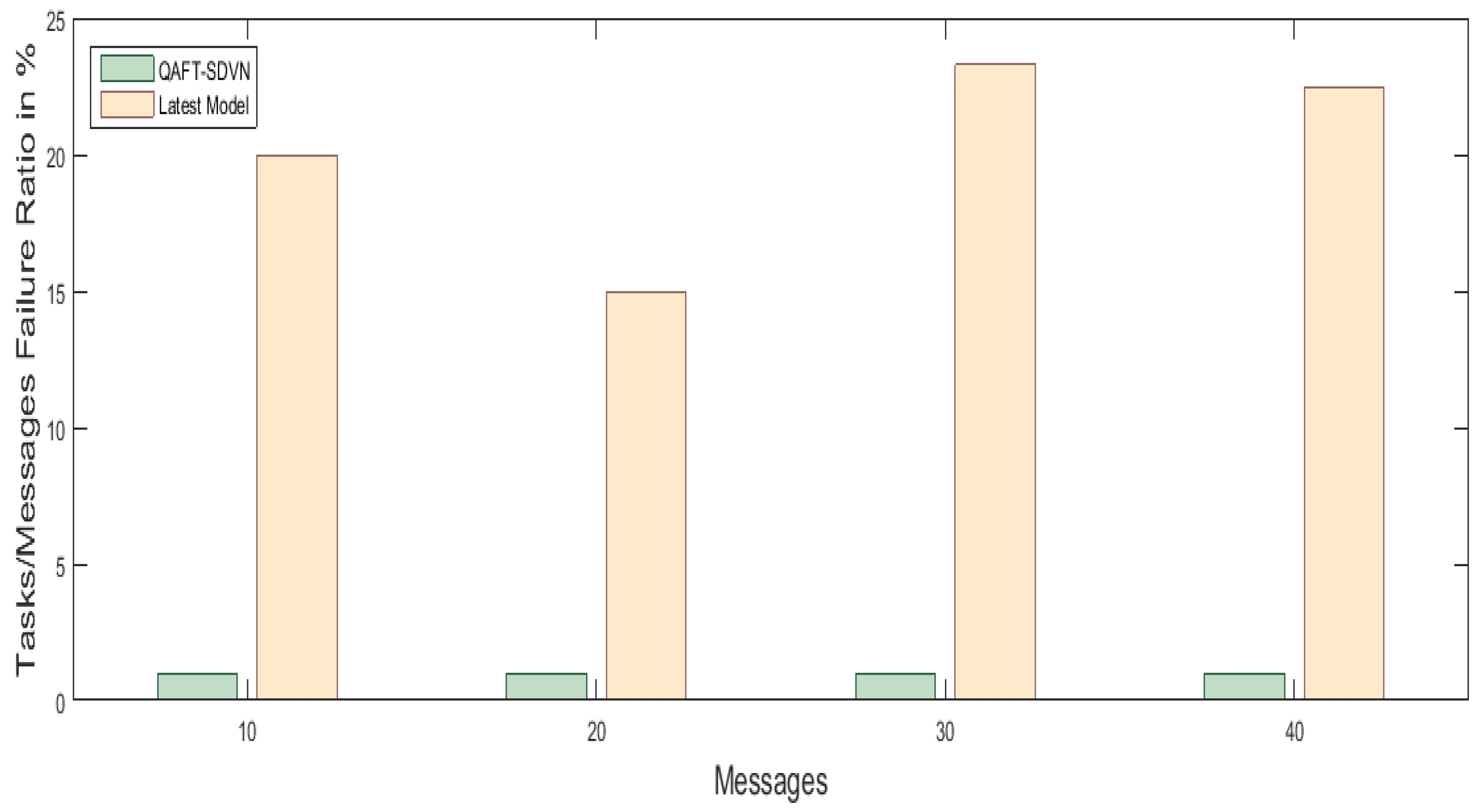
5.4.3. Tasks/Messages Failure Ratio
5.5. Results Comparison
5.5.1. Response Time Comparison with Random and Previous Work of Safety and Non-Safety Messages
5.5.2. Effect of the Execution Time of Latest Model with the Proposed QAFT-SDVN Model
5.5.3. Tasks/Messages Failure Ration Comparison with Previous Work
5.6. Simulation Experiment/ Illustrative Example
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shin, M.K.; Nam, K.H.; Kim, H.J. Software-defined networking (SDN): A reference architecture and open APIs. In Proceedings of the IEEE 2012 International Conference on ICT Convergence (ICTC), Jeju Island, Korea, 15–17 October 2012; pp. 360–361. [Google Scholar]
- Kreutz, D.; Ramos, F.M.V.; Verissimo, P.E.; Rothenberg, C.E.; Azodolmolky, S.; Uhlig, S. Software-defined networking: A comprehensive survey. Proc. IEEE 2015, 103, 14–76. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.; Sunil, A. VANET routing protocols: Issues and challenges. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS), Chandigarh, India, 6–8 March 2014; pp. 1–5. [Google Scholar]
- Borcoci, E. From vehicular Ad-hoc networks to internet of vehicles. In Proceedings of the NexComm 2017 Conference, Venice, Italy, 23–27 April 2017; pp. 23–27. [Google Scholar]
- Kalinin, M.O.; Krundyshev, V.M.; Semianov, P.V. Architectures for building secure vehicular networks based on SDN technology. Autom. Control Comput. Sci. 2017, 51, 907–914. [Google Scholar] [CrossRef]
- Rafique, W.; Qi, L.; Yaqoob, I.; Imran, M.; Rasool, R.U.; Dou, W. Complementing IoT services through software defined networking and edge computing: A comprehensive survey. IEEE Commun. Surv. Tutor. 2020, 22, 1761–1804. [Google Scholar] [CrossRef]
- Peter, M.; Grance, T. The NIST Definition of Cloud Computing; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2011. [Google Scholar]
- Yi, S.; Hao, Z.; Qin, Z.; Li, Q. Fog Computing: Platform and Applications. In Proceedings of the 2015 Third IEEE Workshop on Hot Topics in Web Systems and Technologies (HotWeb), Washington, DC, USA, 12–13 November 2015. [Google Scholar]
- Pankaj, K.; Chakshu, G.; Inderjeet, S. Performance Evaluation of Network Aggregation Techniques in VANET. IJIREEICE 2017, 5, 36–39. [Google Scholar]
- Mousa, S.H.; Ismail, M.; Nordin, R.; Abdullah, N.F. Effective wide spectrum sharing techniques relying on CR technology toward 5G: A survey. J. Commun. 2020, 15, 122–147. [Google Scholar] [CrossRef]
- Goudarzi, S.; Anisi, M.H.; Ahmadi, H.; Musavian, L. Dynamic Resource Allocation Model for Distribution Operations using SDN. IEEE Internet Things J. 2020, 8, 976–988. [Google Scholar] [CrossRef]
- Toufga, S.; Abdellatif, S.; Assouane, H.T.; Owezarski, P.; Villemur, T. Towards Dynamic Controller Placement in Software Defined Vehicular Networks. Sensors 2020, 20, 1701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Soleymani, S.A.; Goudarzi, S.; Anisi, M.H.; Kama, N.; Adli Ismail, S.; Azmi, A.; Hanan Abdullah, A. A trust model using edge nodes and a cuckoo filter for securing VANET under the NLoS condition. Symmetry 2020, 12, 609. [Google Scholar] [CrossRef]
- Sadio, O.; Ibrahima, N.; Claude, L. Design and Prototyping of a Software Defined Vehicular Networking. IEEE Trans. Veh. Technol. 2019, 69, 842–850. [Google Scholar] [CrossRef]
- Al-Mayouf, Y.R.B.; Abdullah, N.F.; Mahdi, O.A.; Khan, S.; Ismail, M.; Guizani, M.; Ahmed, S.H. Real-time intersection-based segment aware routing algorithm for urban vehicular networks. IEEE Trans. Intell. Transp. Syst. 2018, 7, 2125–2141. [Google Scholar] [CrossRef]
- Thota, J.; Abdullah, N.F.; Doufexi, A.; Armour, S. V2V for vehicular safety applications. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2571–2585. [Google Scholar] [CrossRef]
- Alioua, A.; Senouci, S.-M.; Moussaoui, S.; Sedjelmaci, H.; Messous, M.-A. Efficient data processing in software-defined UAV-assisted vehicular networks: A sequential game approach. Wirel. Pers. Commun. 2018, 101, 2255–2286. [Google Scholar] [CrossRef]
- Singh, S.; Negi, S.; Verma, S.K. VANET based p-RSA scheduling algorithm using dynamic cloud storage. Wirel. Pers. Commun. 2018, 98, 3527–3547. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, J.; Cao, G. On scheduling vehicle-roadside data access. In Proceedings of the Fourth ACM International Workshop on Vehicular ad hoc Networks, Montreal, QC, Canada, 10 September 2007; pp. 9–18. [Google Scholar]
- Kumar, R.; Pal, R.; Prakash, A.; Tripathi, R. A Collective Scheduling Algorithm for Vehicular Ad Hoc Network. In Recent Trends in Communication, Computing, and Electronics; Khare, A., Tiwary, U., Sethi, I., Singh, N., Eds.; Springer: Singapore, 2019; pp. 165–180. [Google Scholar]
- Zhu, W.; Gao, D.; Zhao, W.; Zhang, H.; Chiang, H.-P. SDN-enabled hybrid emergency message transmission architecture in internet-of-vehicles. Int. J. Enterp. Inf. Syst. 2018, 12, 471–491. [Google Scholar] [CrossRef]
- Singh, S.; Negi, S.; Verma, S.K.; Panwar, N. Comparative study of existing data scheduling approaches and role of cloud in VANET environment. Procedia Comput. Sci. 2018, 125, 925–934. [Google Scholar] [CrossRef]
- Shahverdya, M.; Asgarib, M.; Fathyc, M. A QoS-based scheduling algorithm in vanets. J. Theor. Appl. Inf. Technol. 2015, 77, 429–437. [Google Scholar]
- Lim, J.M.-Y.; Chang, Y.C.; Alias, M.Y.; Loo, J. Performance modeling of adaptive VANET with enhanced priority scheme. KSIITrans. Internet Inf. Syst. 2015, 9, 1337–1358. [Google Scholar]
- Javad, S.M.; Mahmood, F. A new approach in packet scheduling in the VANET. arXiv 2010, arXiv:1010.0430. [Google Scholar]
- Dubey, B.B.; Chauhan, N.; Chand, N.; Awasthi, L.K. Priority based efficient data scheduling technique for VANETs. Wirel. Netw. 2016, 22, 1641–1657. [Google Scholar] [CrossRef]
- Adnan, M.; Iqbal, J.; Waheed, A.; Amin, N.U.; Zareei, M.; Goudarzi, S.; Umer, A. On the design of efficient hierarchic architecture for software defined vehicular networks. Sensors 2021, 21, 1400. [Google Scholar] [CrossRef]
- Adnan, M.; Iqbal, J.; Waheed, A.; Amin, N.U.; Zareei, M.; Umer, A.; Mohamed, E.M. Towards the Design of Efficient and Secure Architecture for Software-Defined Vehicular Networks. Sensors 2021, 21, 3902. [Google Scholar] [CrossRef]
- Sangaiah, A.K.; Ramamoorthi, J.S.; Rodrigues, J.J.P.C.; Rahman, M.A.; Muhammad, G.; Alrashoud, M. LACCVoV: Linear adaptive congestion control with optimization of data dissemination model in vehicle-to-vehicle communication. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5319–5328. [Google Scholar] [CrossRef]
- Javadpour, A.; Rezaei, S.; Sangaiah, A.K.; Slowik, A.; Khaniabadi, S.M. Enhancement in Quality of Routing Service Using Metaheuristic PSO Algorithm in VANET Networks. Soft Comput. 2021, 1–12. [Google Scholar] [CrossRef]
- Wadhonkar, A.; Deepti, T. An Analysis of Priority Length and Deadline Based Task Scheduling Algorithms in Cloud Computing. IJCSN 2016, 5, 360–364. [Google Scholar]
- Calheiros, R.N.; Ranjan, R.; Beloglazov, A.; De Rose, C.; Buyya, R. CloudSim: A toolkit for modeling and simulation of cloud computing environments and evaluation of resource provisioning algorithms. Softw. Pract. Exp. 2011, 41, 23–50. [Google Scholar] [CrossRef]
- Gupta, H.; Dastjerdi, A.V.; Ghosh, S.K.; Buyya, R. iFogSim: A toolkit for modeling and simulation of resource management techniques in the Internet of Things, Edge and Fog computing environments. Softw. Pract. Exp. 2017, 47, 1275–1296. [Google Scholar] [CrossRef] [Green Version]
- Umer, A.; Nazir, B.; Ahmad, Z. Adaptive market-oriented combinatorial double auction resource allocation model in cloud computing. J. Supercomput. 2021, 1–43. [Google Scholar] [CrossRef]
- Ullah, Z.; Umer, A.; Zaree, M.; Ahmad, J.; Alanazi, F.; Amin, N.U.; Umar, A.I.; Jehangiri, A.I.; Adnan, M. Negotiation Based Combinatorial Double Auction Mechanism in Cloud Computing. CMC-Comput. Mater. Contin. 2021, 69, 2123–2140. [Google Scholar] [CrossRef]
- Ahmad, Z.; Nazir, B.; Umer, A. A fault-tolerant workflow management system with Quality-of-Service-aware scheduling for scientific workflows in cloud computing. Int. J. Commun. Syst. 2021, 34, e4649. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Design | Model Name | Model Structure | Advantages | Disadvantages |
|---|---|---|---|---|
| VANET Models | VANET Based Mobile Ad-hoc Network | Vehicular ad-hoc systems for vehicles using wireless technology using mobile cellular system for communication | Efficient for movable vehicles for sharing important information | Dynamic topology updating and connection was a problem |
| Safety and Non-Safety Messages VANET Architecture | Priority Basis vehicular ad-hoc network for the vehicle to vehicle (V2V) communication | An efficient model for important messages by using priorities | Difficult to categorize safety and non-safety messages | |
| SDN Models for Vehicles Communication | Open Flow Model | Software Defined Networking Based V2V Model using wireless technology | Efficient for cross layer devices and compatible with different machines | Complex, difficult to implement in real world |
| RSU Based Model | SDN Based Roadside Unit Vehicular Network Architecture | The communication can be delivered to multiple vehicles at a time | Difficult to find shortest RSU for multiple vehicles | |
| SDNE Model | Services provision to vehicles to their nearby edge architecture | Reduced response time and energy consumption | Node energy is the problem of edge services | |
| RTISAR Algorithm | QoS aware model for V2V communication | Reduced connectivity and response time | Point to Point link is a drawback of the system | |
| SDVN Models for Vehicles Communication | Topology based SDVN Model | SDN and VANET based model using dynamic path selection of vehicles | Reduced communication cost using unicast and multi-cast models | Difficult to combine SDV with VANET |
| Controller based SDVN Model | Dynamic Controller based V2V model | Efficient for roadside traffic | Controller location placement is dependent on the performance of the model | |
| Multi-Access Edge Model | Put services on different edges of the roadside vehicles | Efficient for important messages as the network has low latency | Putting edge devices on different locations is costly | |
| SDN Environment Based SDVN Model | Open Flow Switches based SDVN model | Accommodate more vehicles at a time using switches | Complex architecture and experience more delay | |
| SDVN Scheduling Models | UVN Based Model | Unmanned Ariel Network, architecture less model, using zone-based data offloading model | Efficient for emergency zone data | Other than emergency zone data will have to experience unlimited delay |
| Priority Basis RSA Algorithm | FCFS, SJF based model for urgent, least urgent data | Reduced energy consumption | Priority assigning is difficult | |
| D*S Algorithm | Priority based model based on deadline and size | Reduced communication cost of urgent messages | Increased communication cost of normal messages | |
| Collective Scheduling Algorithm | Used different scheduling models for priority-based messages | Efficient for important and urgent messages | Slow for normal messages |
| Abbreviation | Standsfor |
|---|---|
| £ | Successfulmessages |
| Failedtasks/messages | |
| Messagesofvehicles | |
| Acknowledgment | |
| SoftwareDefinedVehicularNetwork | |
| & | Safetyandnon-safetymessages |
| Receivedmessagesforforwarding | |
| SoftwareDefinedNetworking | |
| M | Message |
| C | CloudComputing |
| FogComputing | |
| Responsetime/ExecutionTime | |
| QoS | QualityofService |
| VANET | VehicularAd-HocNetwork |
| F | TasksFailureRatio |
| S. No. | Message with ID | Deadline (Seconds) | Size (Bits) |
|---|---|---|---|
| 1 | Rescue call 010 | 67 | 2300 |
| 2 | Hospital Emergency call (011) | 65 | 2100 |
| 3 | Call to nearest traffic signal (012) | 77 | 2800 |
| 4 | Police help for accident (013) | 61 | 2000 |
| 5 | Nearest petrol help (014) | 72 | 2700 |
| 6 | Robbery (015) | 59 | 1900 |
| 7 | Murder information (016) | 60 | 2100 |
| Setup | Power | Tasks/Messages | Users/Broker | VMs |
|---|---|---|---|---|
| Cloud Setup | One datacenter | 40 Cloudlets | One Broker | One VM |
| Fog Setup | Three fog nodes | – | – | 3 SDN |
| Vehicles Setup | 15 Vehicles | 40 messages | 15 brokers | – |
| S. No. | Configuration | Detail |
|---|---|---|
| 1 | DC Architecture | x86 |
| 2 | DCRAM (MB) | 512 |
| 3 | DC Storage (MB) | 2048 |
| 4 | DC OS Hypervisor | Xen |
| 5 | DC Computation Power (MIPS) | 1000/sec |
| 6 | DC Bandwidth (MBPS) | 1000 |
| S. No. | Vehicle No. | Message | Deadline | Size | Deadline & Size | Priority No. |
|---|---|---|---|---|---|---|
| 1 | V1 | Robbery (015) | 59 | 1900 | 112,100 | P1 |
| 2 | V2 | Hospital Emergency call (011) | 65 | 2100 | 136,500 | P4 |
| 3 | V3 | Police help for accident (013) | 61 | 2000 | 122,000 | P2 |
| 4 | V4 | Murder information (016) | 60 | 2100 | 126,000 | P3 |
| 5 | V5 | Rescue call 010 | 67 | 2300 | 154,100 | P5 |
| S. No. | Vehicle No. | Message | Deadline | Size | Deadline & Size | Priority |
|---|---|---|---|---|---|---|
| 1 | V1 | Call to nearest traffic signal (012) | 77 | 2800 | 215,600 | P4 |
| 2 | V2 | Nearest petrol help (014) | 72 | 2700 | 194,400 | P1 |
| 3 | V3 | Call to nearest traffic signal (012) | 75 | 2800 | 210,000 | P3 |
| 4 | V4 | Nearest petrol help (014) | 74 | 2700 | 199,800 | P2 |
| 5 | V5 | Call to nearest traffic signal (012) | 78 | 2800 | 218,400 | P5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Syed, S.A.; Rashid, M.; Hussain, S.; Azim, F.; Zahid, H.; Umer, A.; Waheed, A.; Zareei, M.; Vargas-Rosales, C. QoS Aware and Fault Tolerance Based Software-Defined Vehicular Networks Using Cloud-Fog Computing. Sensors 2022, 22, 401. https://doi.org/10.3390/s22010401
Syed SA, Rashid M, Hussain S, Azim F, Zahid H, Umer A, Waheed A, Zareei M, Vargas-Rosales C. QoS Aware and Fault Tolerance Based Software-Defined Vehicular Networks Using Cloud-Fog Computing. Sensors. 2022; 22(1):401. https://doi.org/10.3390/s22010401
Chicago/Turabian StyleSyed, Sidra Abid, Munaf Rashid, Samreen Hussain, Fahad Azim, Hira Zahid, Asif Umer, Abdul Waheed, Mahdi Zareei, and Cesar Vargas-Rosales. 2022. "QoS Aware and Fault Tolerance Based Software-Defined Vehicular Networks Using Cloud-Fog Computing" Sensors 22, no. 1: 401. https://doi.org/10.3390/s22010401
APA StyleSyed, S. A., Rashid, M., Hussain, S., Azim, F., Zahid, H., Umer, A., Waheed, A., Zareei, M., & Vargas-Rosales, C. (2022). QoS Aware and Fault Tolerance Based Software-Defined Vehicular Networks Using Cloud-Fog Computing. Sensors, 22(1), 401. https://doi.org/10.3390/s22010401