
Energy-Aware Dynamic 3D Placement of Multi-Drone Sensing Fleet



Abstract
1. Introduction
1.1. Related Work
1.2. Our Contribution
2. System Architecture
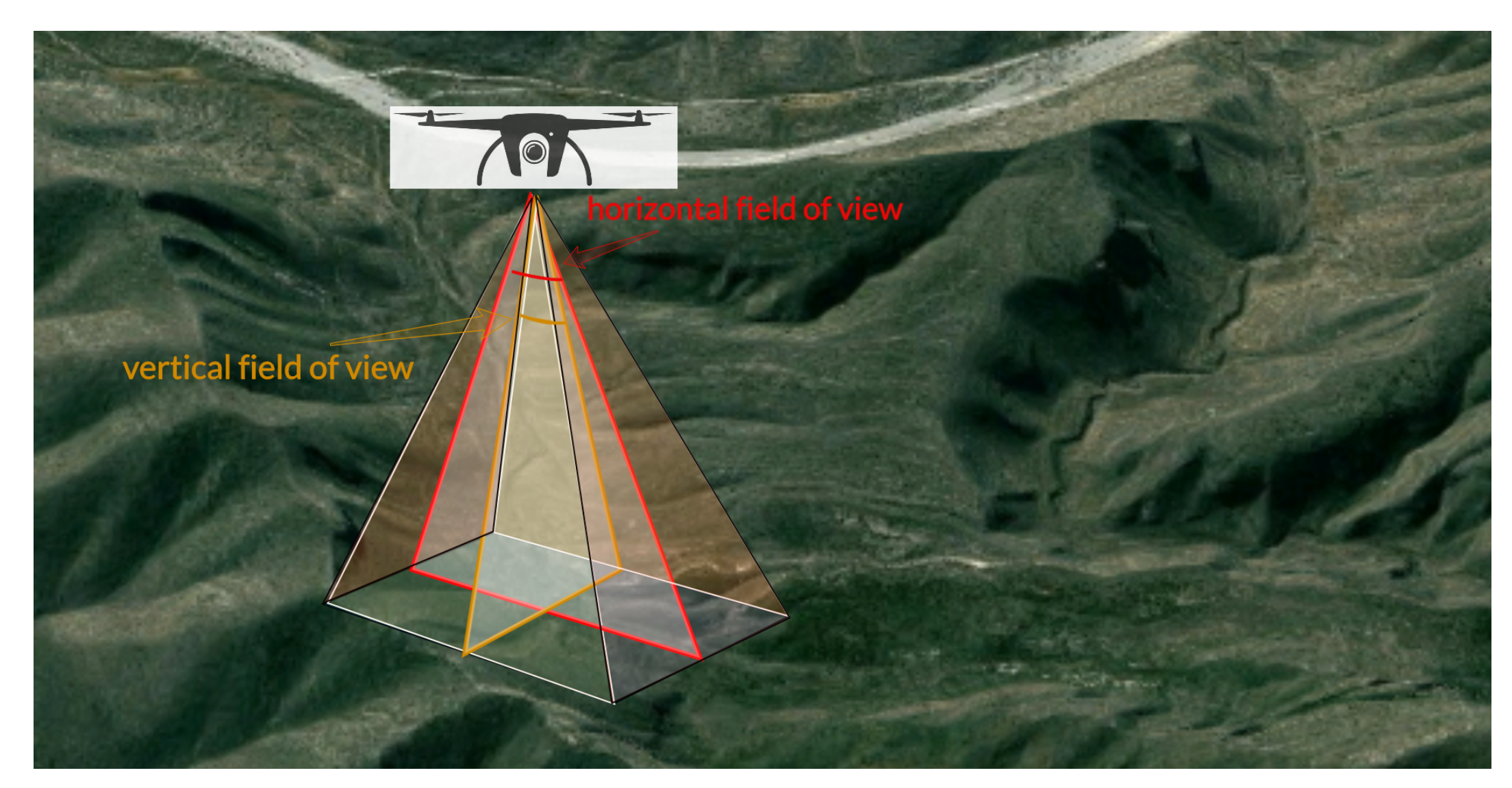
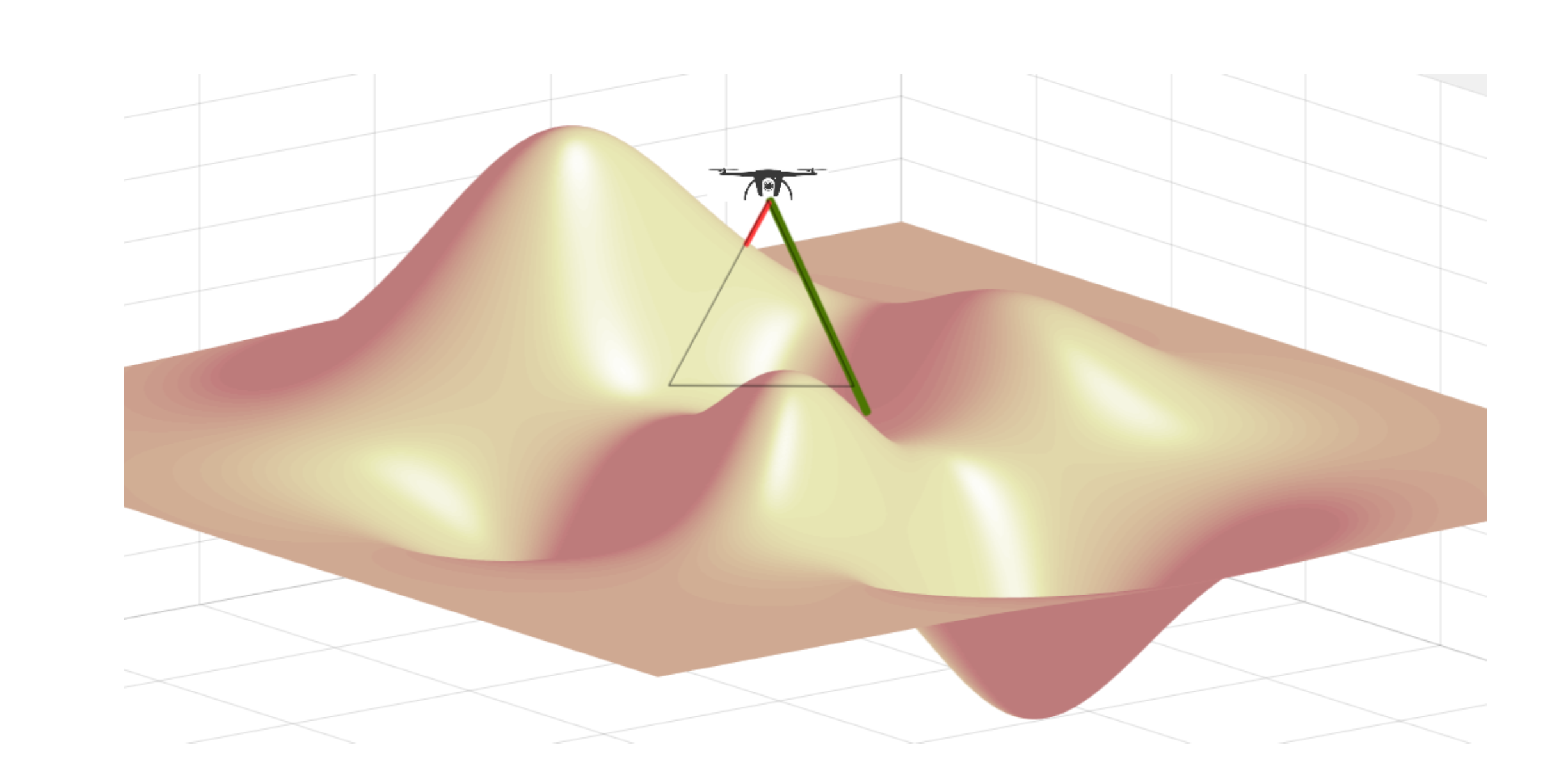
2.1. System Model
- building a regional coverage model;
- determining the least number of drones needed for coverage in a given area;
- finding optimal drones’ 3D-placement locations to save communication energy;
- proposing a strategy to prolong the entire drone fleet’s lifetime.
2.2. Energy Model
2.2.1. Flight Mode
2.2.2. Calculation Mode
2.2.3. Communication Mode
3. Research Methods
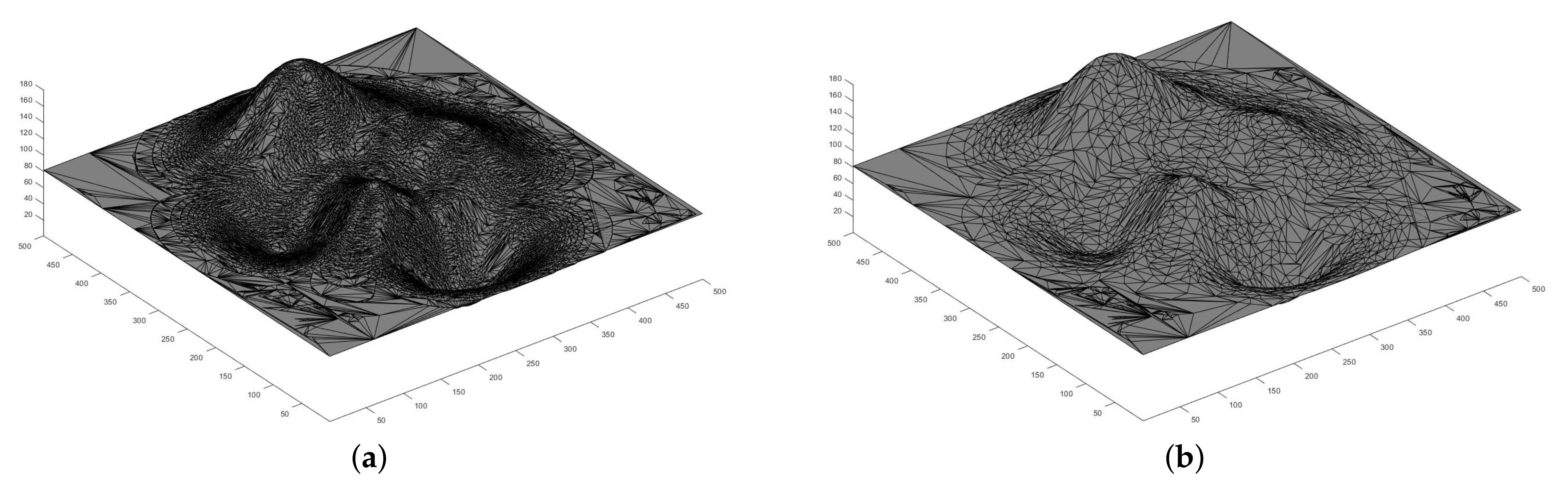
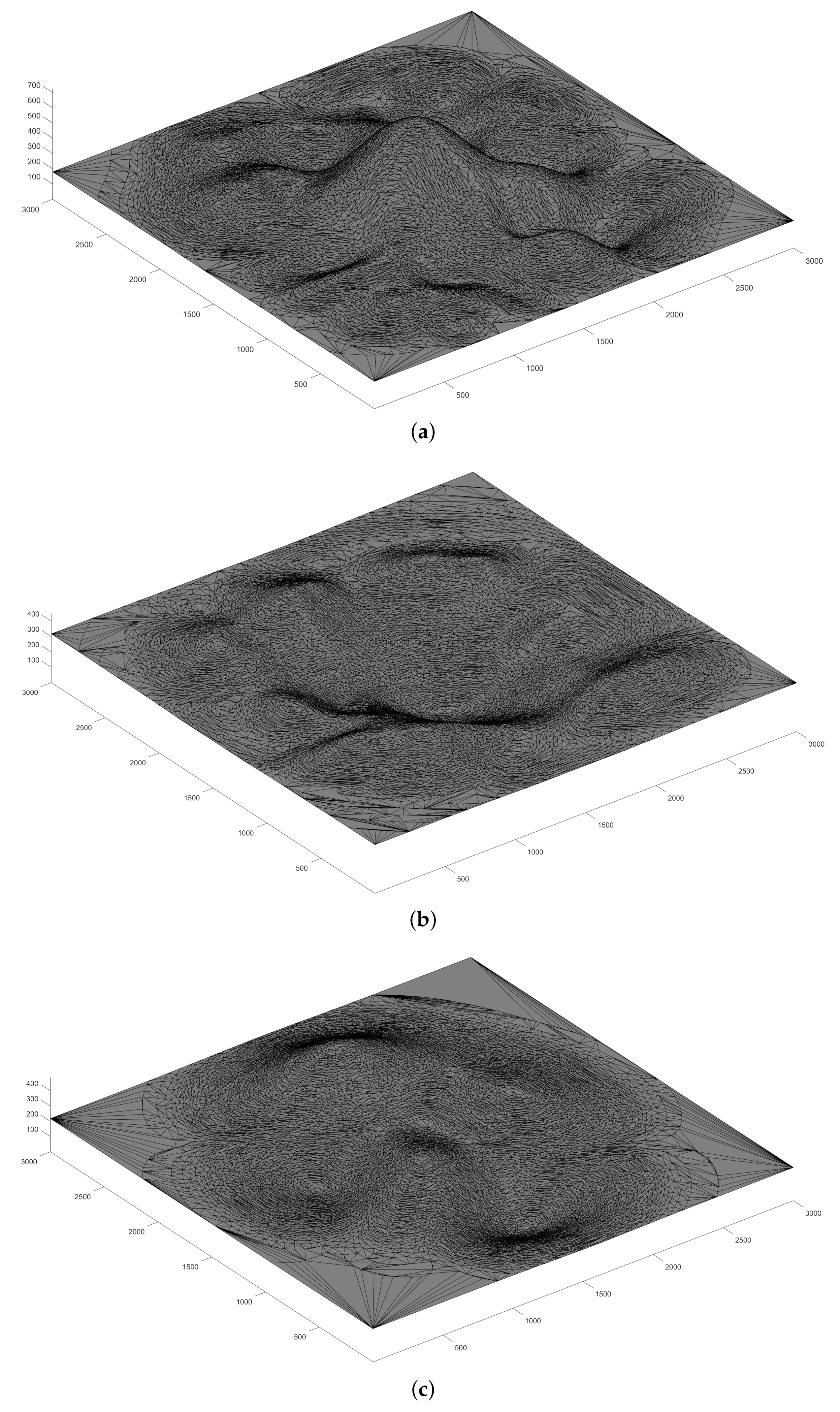
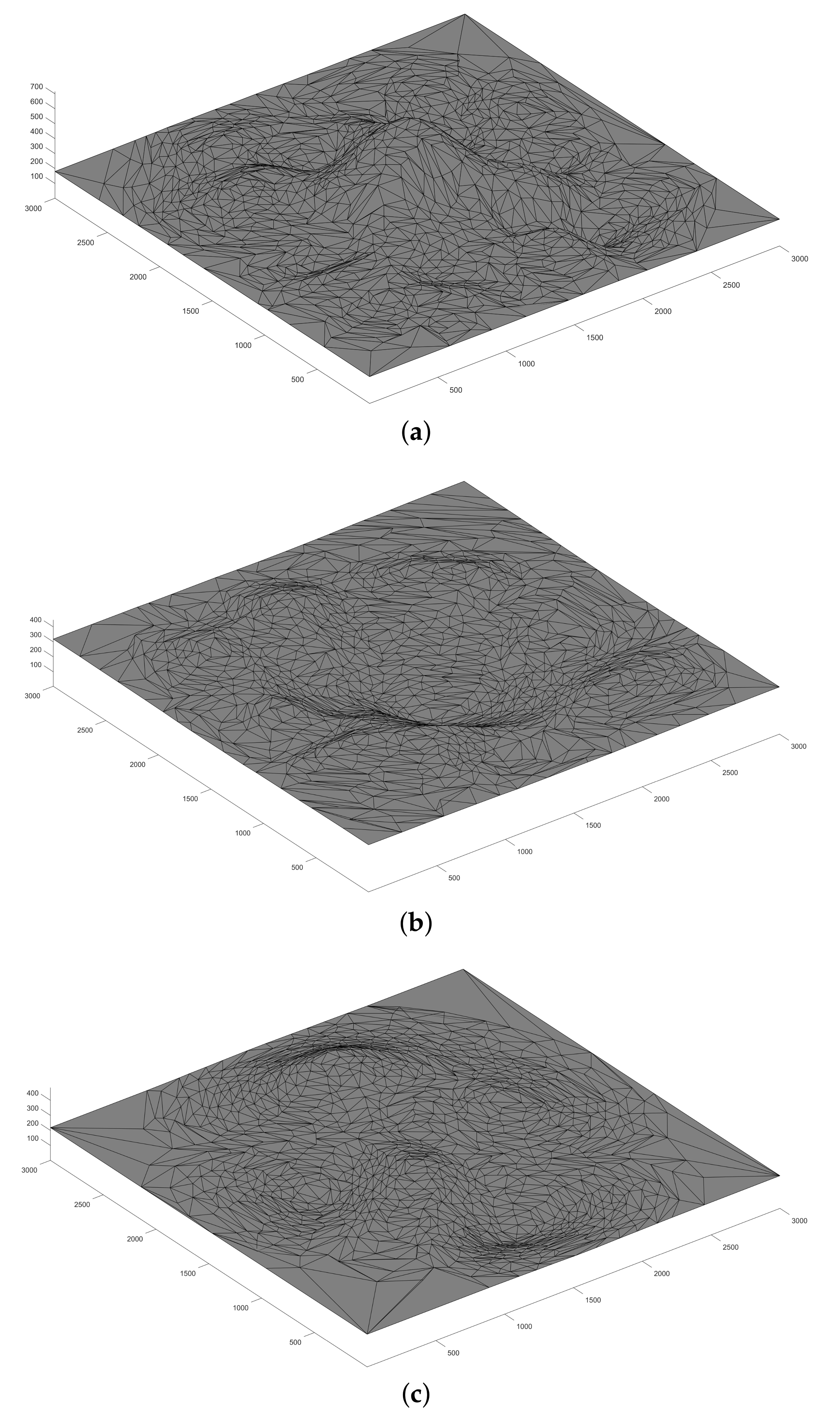
3.1. Terrain Simplification
- transfer height map H into a 3D binary volume array ;
- extract the isosurface of the volumetric array V and store the faces and vertices information as ;
- apply a mesh decimation algorithm to simplify the surface and obtain faces and vertices as .
| Algorithm 1: Terrain Simplification: Calculate |
| Require: |
| Ensure: |
| 1: |
| 2: for to a do |
| 3: for to a do |
| 4: for to |
| 5: |
| 6: end for |
| 7: end for |
| 8: end for |
| 9: |
| 10: |
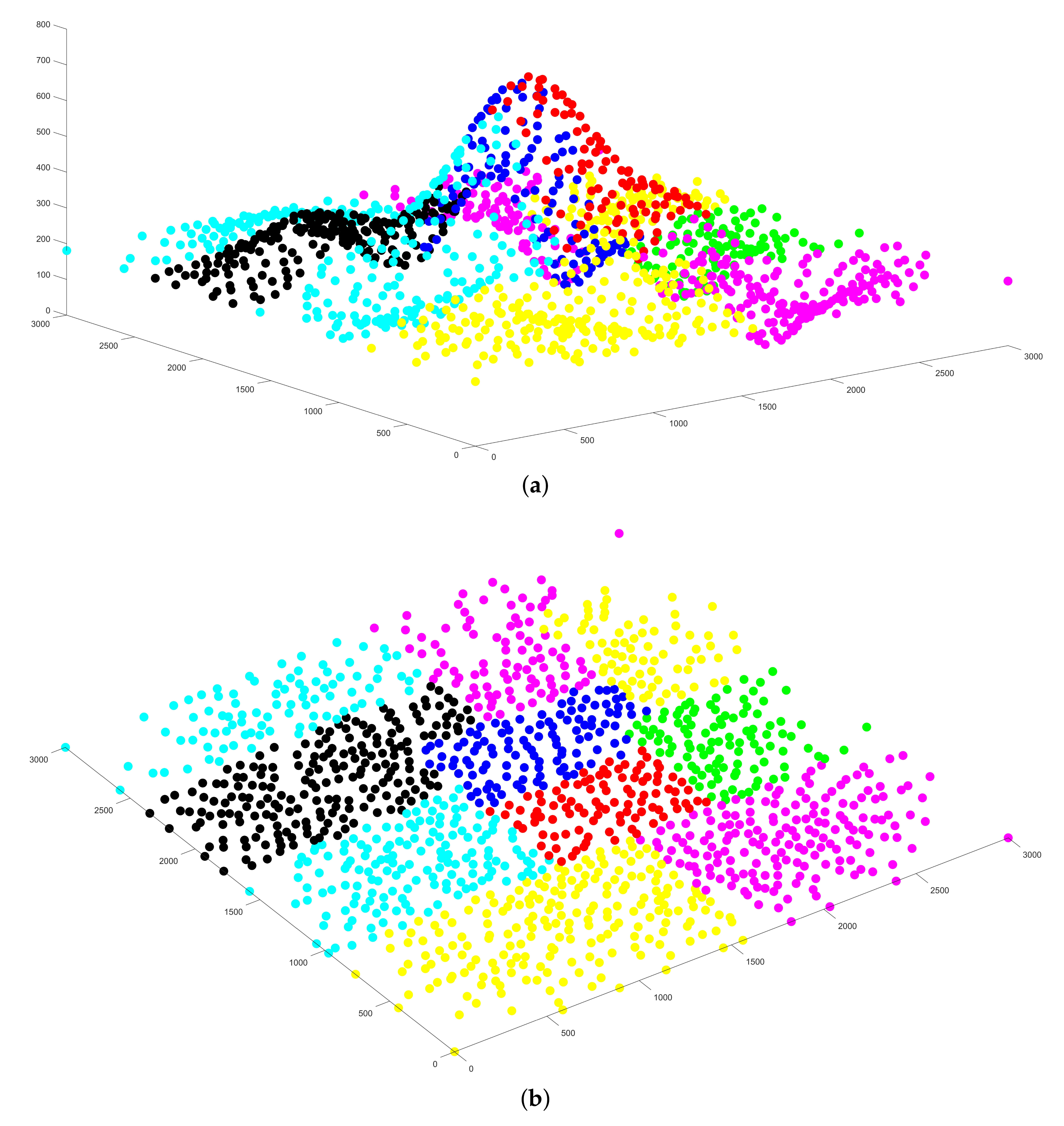
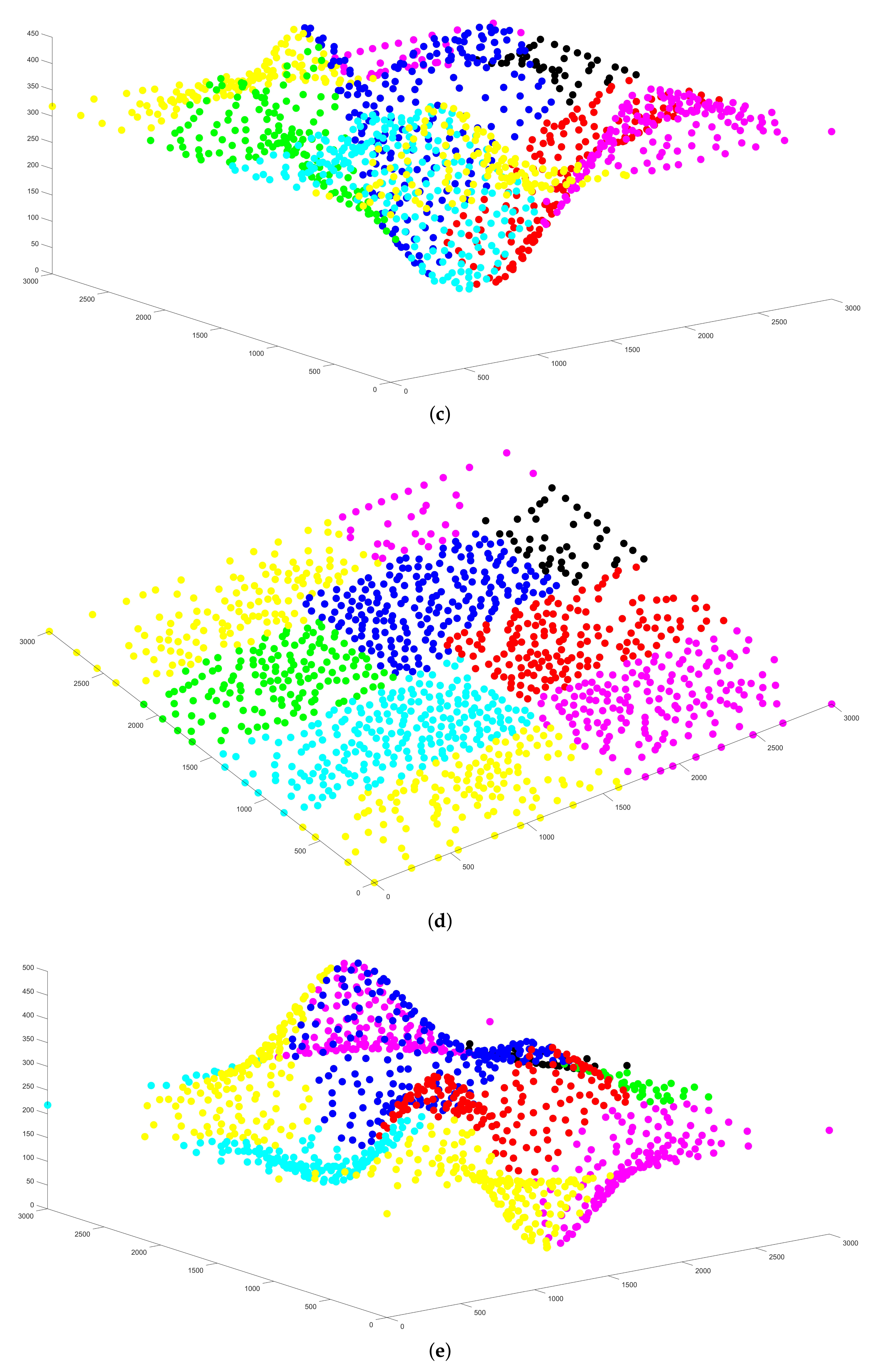
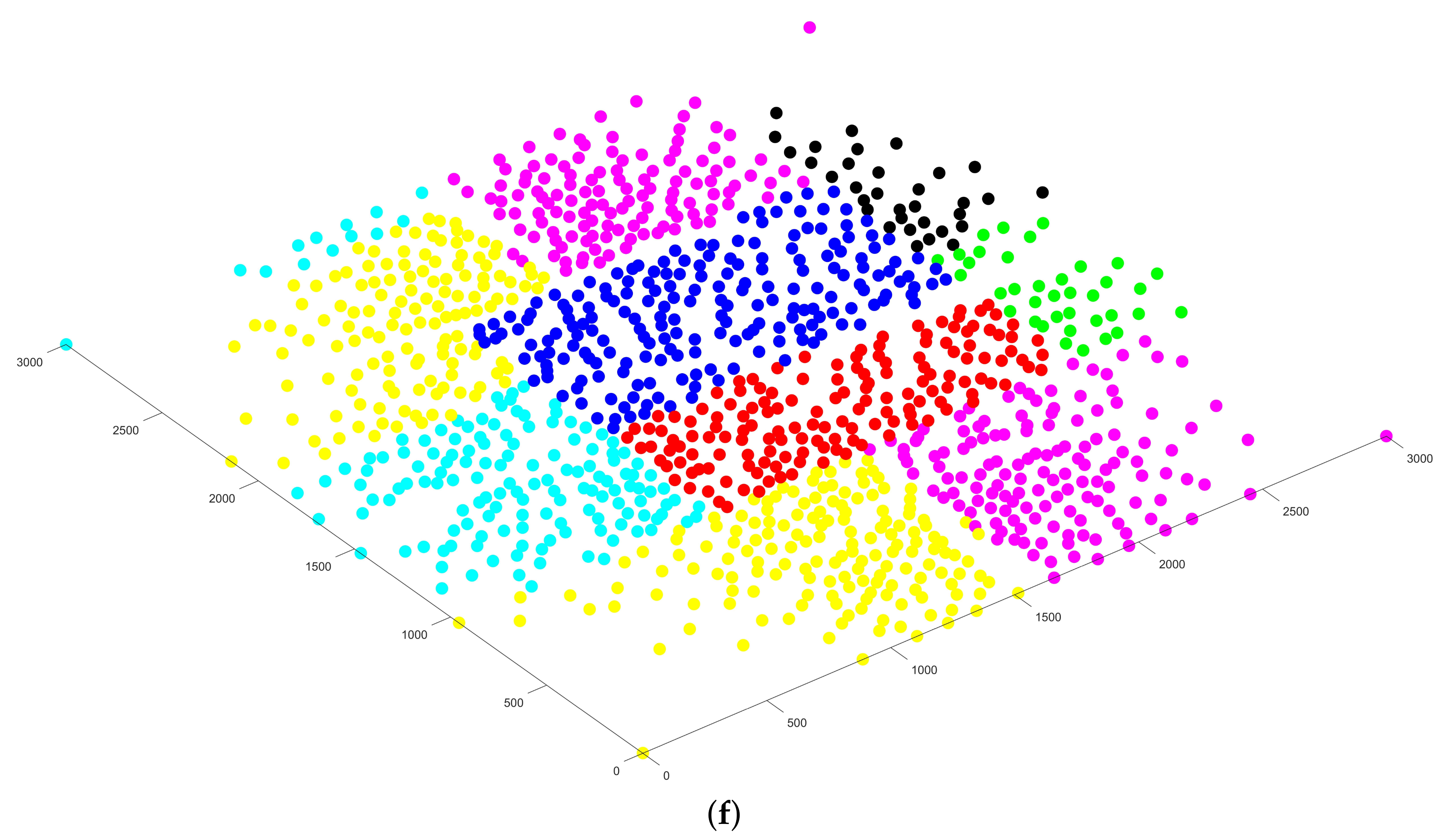
3.2. Area Division
| Algorithm 2: Area Division: Calculate |
| Require: |
| Ensure: |
| 1: |
| 2: |
| 3: while do |
| 4: |
| 5: T |
| 6: |
| 7: repeat |
| 8: |
| 9: |
| 10: for do |
| 11: if and then |
| 12: |
| 13: end if |
| 14: end for |
| 15: for do |
| 16: for to do |
| 17: |
| 18: |
| 19: for do |
| 20: if then |
| 21: |
| 22: end if |
| 23: end for |
| 24: |
| 25: if and and then |
| 26: |
| 27: end if |
| 28: end for |
| 29: if then |
| 30: |
| 31: end if |
| 32: end for |
| 33: |
| 34: until |
| 35: |
| 36: end while |
3.3. Placement
- initialize each sub-area’s drone location with a random element of ;
- for each sub-area , find the best location within that minimizes the total distance from drone to where ;
- compare the new drone coordinate set with previous ones;
- if the differences are greater than a predefined threshold, repeat steps 3 and 4. Otherwise, return current drone fleet coordinates.
| Algorithm 3: Placement: Calculate |
| Require: |
| Ensure: |
| 1: for to n do |
| 2: for do |
| 3: for to do |
| 4: |
| 5: |
| 6: for do |
| 7: if then |
| 8: |
| 9: end if |
| 10: end for |
| 11: |
| 12: if and and then |
| 13: if |
| 14: end if |
| 15: end for |
| 16: end for |
| 17: end for |
| 18: for to n do |
| 19: |
| 20: end for |
| 21: |
| 22: |
| 23: while do |
| 24: for n do |
| 25: |
| 26: for do |
| 27: |
| 28: if then |
| 29: |
| 30: |
| 31: end if |
| 32: end for |
| 33: end for |
| 34: |
| 35: |
| 36: end while |
3.4. Dynamic Adjustment
| Algorithm 4: Routing Table: Calculate |
| Require: |
| Ensure: |
| 1: for n do |
| 2: for do n do |
| 3: |
| 4: |
| 5: end for |
| 6: end for |
| 7: for to n do |
| 8: |
| 9: |
| 10: |
| 11: while do |
| 12: for do |
| 13: if then |
| 14: |
| 15: |
| 16: end if |
| 17: end for |
| 18: j |
| 19: |
| 20: |
| 21: end while |
| 22: end for |
| Algorithm 5: Positions Dynamic Switch: Calculate |
| Require: |
| Ensure: |
| 1: while do |
| 2: update() |
| 3: if then |
| 4: |
| 5: |
| 6: lowest battery drone |
| 7: if then |
| 8: Calculate SwitchMoveCost(ID,j) |
| 9: Initiate switch protocol |
| 10: if request accepted then |
| 11: Inform next highest battery drone |
| 12: Broadcast has been switched |
| 13: end if |
| 14: end if |
| 15: end if |
| 16: end while |
| 17: Current time |
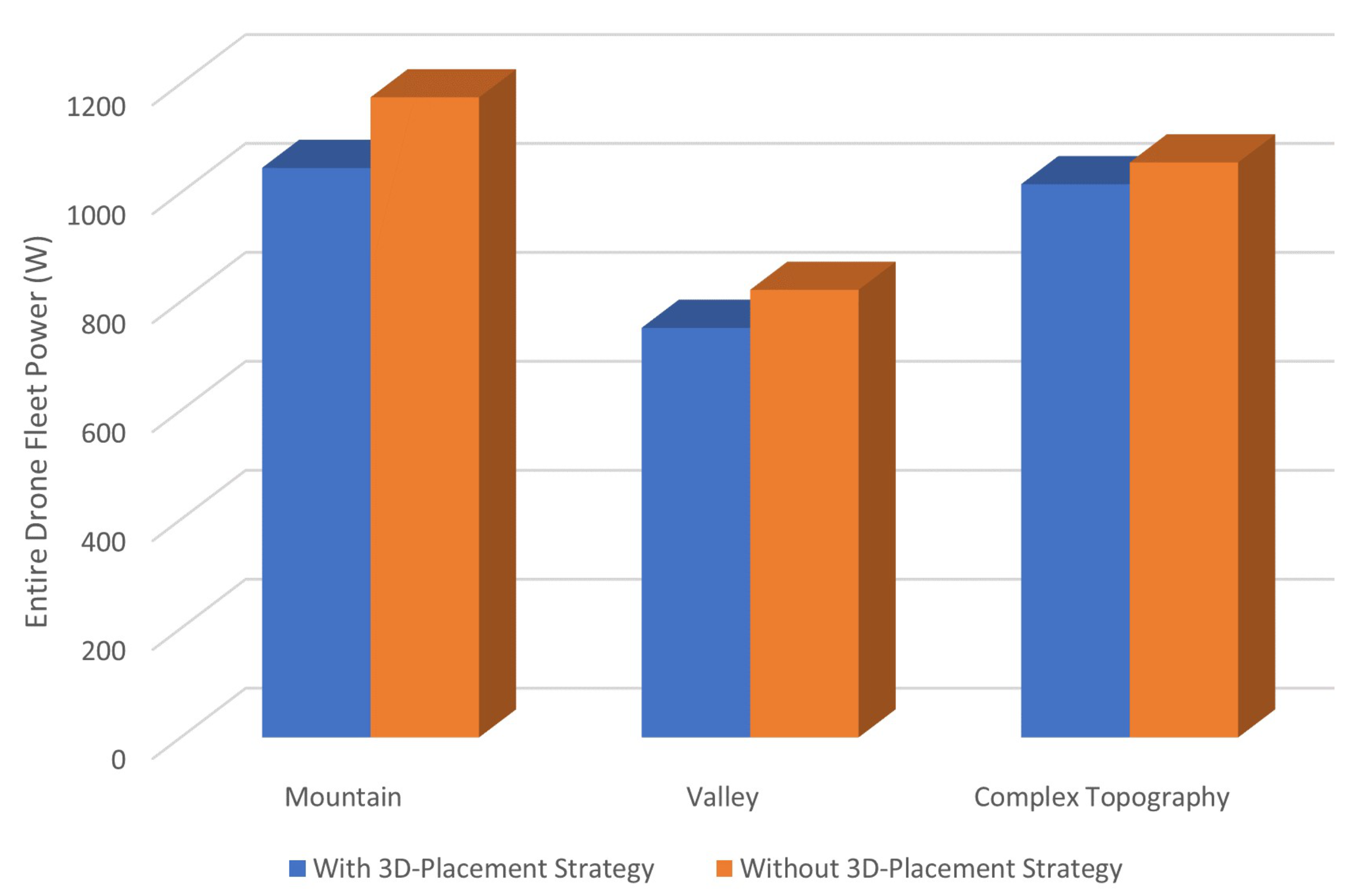
4. Results Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Buffi, A.; Nepa, P.; Cioni, R. SARFID on drone: Drone-based UHF-RFID tag localization. In Proceedings of the IEEE International Conference on RFID Technology & Application (RFID-TA 2017), Warsaw, Poland, 20–22 September 2017; pp. 40–44. [Google Scholar]
- Alwateer, M.; Loke, S.W.; Rahayu, W. Drone services: An investigation via prototyping and simulation. In Proceedings of the IEEE 4th World Forum on Internet of Things (WF-IoT 2018), Singapore, 5–8 February 2018; pp. 367–370. [Google Scholar]
- Nouacer, R.; Ortiz, H.E.; Ouhammou, Y.; González, R.C. Framework of Key Enabling Technologies for Safe and Autonomous Drones’ Applications. In Proceedings of the 22nd Euromicro Conference on Digital System Design (DSD 2019), Kallithea, Greece, 28–30 August 2019; pp. 420–427. [Google Scholar]
- He, S.; Chen, X.; Hung, M.H.; Chen, X.; Ji, Y. Steering Angle Measurement of UAV Navigation Based on Improved Image Processing. J. Inf. Hiding Multimed. Signal Process. 2019, 10, 384–391. [Google Scholar]
- Wallerman, J.; Bohlin, J.; Nilsson, M.B.; Franssen, J.E. Drone-Based Forest Variables Mapping of ICOS Tower Surroundings. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018), Valencia, Spain, 22–27 July 2018; pp. 9003–9006. [Google Scholar]
- Mitcheson, P.D.; Boyle, D.; Kkelis, G.; Yates, D.; Saenz, J.A.; Aldhaher, S.; Yeatman, E. Energy-autonomous sensing systems using drones. In Proceedings of the 2017 IEEE SENSORS, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar]
- D’Odorico, P.; Besik, A.; Wong, C.Y.; Isabel, N.; Ensminger, I. High-throughput drone-based remote sensing reliably tracks phenology in thousands of conifer seedlings. New Phytol. 2020, 226, 1667–1681. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Jia, X.; Paull, D.; Zhang, J.; Farooq, A.; Chen, X.; Islam, M.N. A drone-based sensing system to support satellite image analysis for rice farm mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2019), Yokohama, Japan, 28 July–2 August 2019; pp. 9376–9379. [Google Scholar]
- Reinecke, M.; Prinsloo, T. The influence of drone monitoring on crop health and harvest size. In Proceedings of the 1st International Conference on Next Generation Computing Applications (NextComp 2017), Moka, Mauritius, 19–21 July 2017; pp. 5–10. [Google Scholar]
- Nithyavathy, N.; Kumar, S.A.; Rahul, D.; Kumar, B.S.; Shanthini, E.; Naveen, C. Detection of Fire Prone Environment Using Thermal Sensing Drone; IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2021; Volume 1055, p. 012006. [Google Scholar]
- Hill, A.C.; Laugier, E.J.; Casana, J. Archaeological remote sensing using multi-temporal, drone-acquired thermal and Near Infrared (NIR) Imagery: A case study at the Enfield Shaker Village, New Hampshire. Remote Sens. 2020, 12, 690. [Google Scholar] [CrossRef]
- Holness, C.; Matthews, T.; Satchell, K.; Swindell, E.C. Remote sensing archeological sites through unmanned aerial vehicle (UAV) imaging. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2016), Beijing, China, 11–15 July 2016; pp. 6695–6698. [Google Scholar]
- Inoue, Y.; Yokoyama, M. Drone-Based Optical, Thermal, and 3D Sensing for Diagnostic Information in Smart Farming–Systems and Algorithms. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2019), Yokohama, Japan, 28 July–2 August 2019; pp. 7266–7269. [Google Scholar]
- Yi, W.; Sutrisna, M. Drone scheduling for construction site surveillance. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 3–13. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef]
- Wang, L.; Hu, B.; Chen, S. Energy efficient placement of a drone base station for minimum required transmit power. IEEE Wirel. Commun. Lett. 2018, 9, 2010–2014. [Google Scholar] [CrossRef]
- Gao, F.; Zhou, Y.; Ma, X.; Yang, T.; Cheng, N.; Lu, N. Coverage-maximization and Energy-efficient Drone Small Cell Deployment in Aerial-Ground Collaborative Vehicular Networks. In Proceedings of the IEEE 4th International Conference on Computer and Communication Systems (ICCCS 2019), Singapore, 23–25 February 2019; pp. 559–564. [Google Scholar]
- Ghorbel, M.B.; Rodríguez-Duarte, D.; Ghazzai, H.; Hossain, M.J.; Menouar, H. Joint position and travel path optimization for energy efficient wireless data gathering using unmanned aerial vehicles. IEEE Trans. Veh. Technol. 2019, 68, 2165–2175. [Google Scholar] [CrossRef]
- Kouroshnezhad, S.; Peiravi, A.; Haghighi, M.S. Energy-Efficient Drone Trajectory Planning for the Localization of 6G-enabled IoT Devices. IEEE Internet Things J. 2020, 8, 5202–5210. [Google Scholar] [CrossRef]
- Huynh, T.; Hwang, W.J. Network lifetime maximization in wireless sensor networks with a path-constrained mobile sink. Int. J. Distrib. Sens. Netw. 2015, 11, 679093. [Google Scholar] [CrossRef]
- Engmann, F.; Katsriku, F.A.; Abdulai, J.D.; Adu-Manu, K.S.; Banaseka, F.K. Prolonging the lifetime of wireless sensor networks: A review of current techniques. Wirel. Commun. Mob. Comput. 2018, 2018, 8035065. [Google Scholar] [CrossRef]
- Verbeke, J.; Hulens, D.; Ramon, H.; Goedeme, T.; De Schutter, J. The design and construction of a high endurance hexacopter suited for narrow corridors. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS 2014), Orlando, FL, USA, 27–30 May 2014; pp. 543–551. [Google Scholar]
- Yuan, H.; Xie, J.; Hu, N. Lifetime-optimal sensor deployment for wireless sensor networks with mobile sink. In Proceedings of the 2011 6th IEEE Joint International Information Technology and Artificial Intelligence Conference, Chongqing, China, 20–22 August 2011; Volume 1, pp. 451–454. [Google Scholar]
- Sun, Y.; Liu, Y.; Zhou, N.; Lueth, T.C. A MATLAB-Based Framework for Designing 3D Topology Optimized Soft Robotic Grippers. TechRxiv 2020. [Google Scholar] [CrossRef]
- Remelli, E.; Lukoianov, A.; Richter, S.R.; Guillard, B.; Bagautdinov, T.; Baque, P.; Fua, P. MeshSDF: Differentiable Iso-Surface Extraction. arXiv 2020, arXiv:2006.03997. [Google Scholar]
- Echegaray, S.; Bakr, S.; Rubin, D.L.; Napel, S. Quantitative Image Feature Engine (QIFE): An open-source, modular engine for 3D quantitative feature extraction from volumetric medical images. J. Digit. Imaging 2018, 31, 403–414. [Google Scholar] [CrossRef] [PubMed]
- Maddams, W. The scope and limitations of curve fitting. Appl. Spectrosc. 1980, 34, 245–267. [Google Scholar] [CrossRef]
- Qing-Wan, H. Curve fitting by curve fitting toolbox of Matlab. Comput. Knowl. Technol. 2010, 21, 68. [Google Scholar]
- Fan, D.; Shi, P. Improvement of Dijkstra’s algorithm and its application in route planning. In Proceedings of the 2010 Seventh International Conference on Fuzzy Systems and Knowledge Discovery, Yantai, China, 10–12 August 2010; Volume 4, pp. 1901–1904. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Field side length a | 3000 m | Drone maximum moving power | 4 W |
| Horizontal FOV | 120 | Drone maximum speed | 25 m s |
| Resolution requirements | 1 pixel m | Drone processing power | 1 W |
| Drone’s mass m | 800 g | Transceiver circuitry energy consumption | 50 nJ bit |
| Number of propellers n | 4 | Transmitter amplifier energy consumption | 100 pJ bit m |
| Propeller’s radius r | 12 cm | Drone initial energy storage | 34,632 J |
| Gravitational acceleration g | 9.8 m s | Communication rate within drones | 49.8 Mbit s |
| Air density | 1.225 kg m | Drone switching overheads power | 1 W |
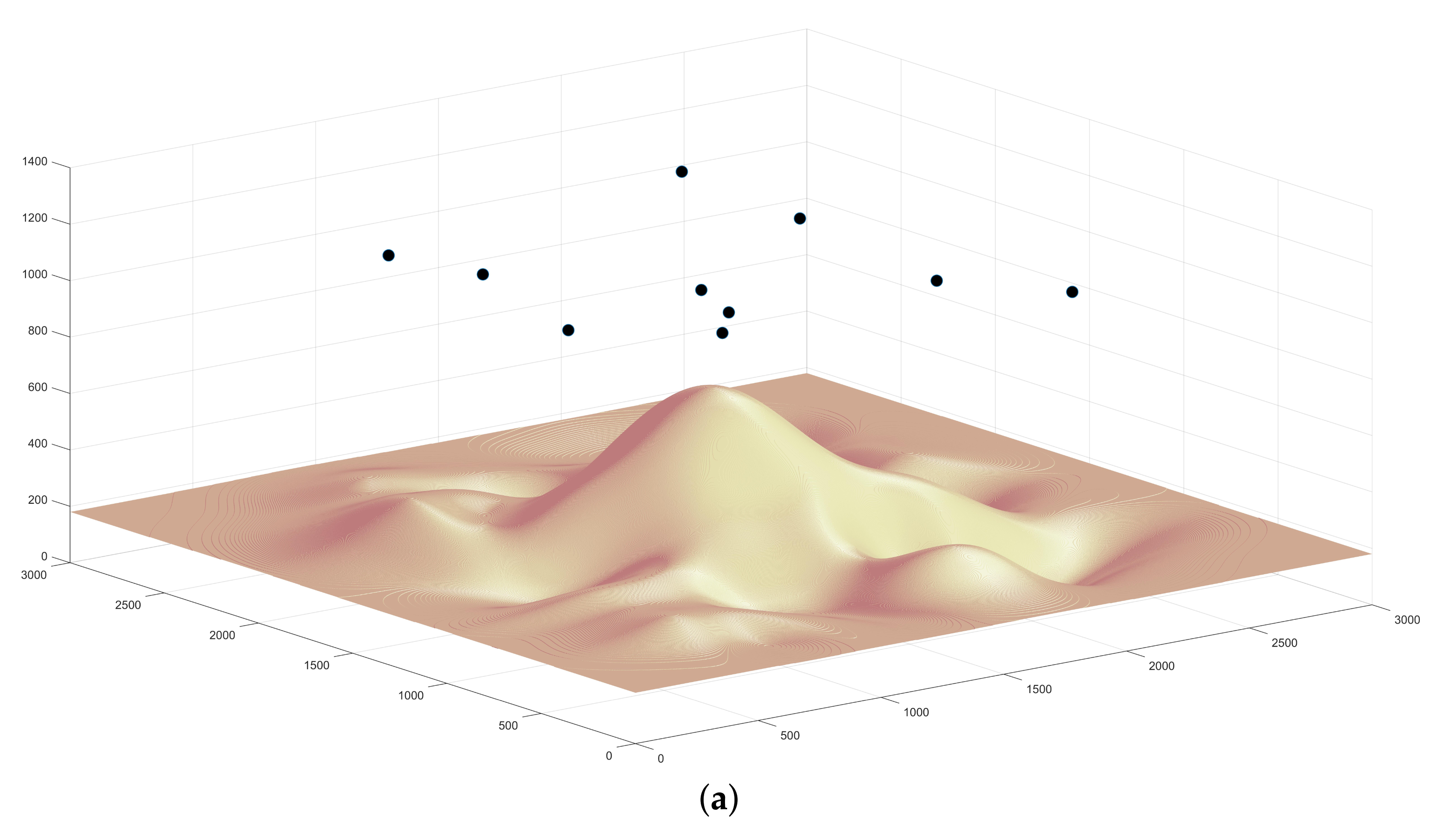
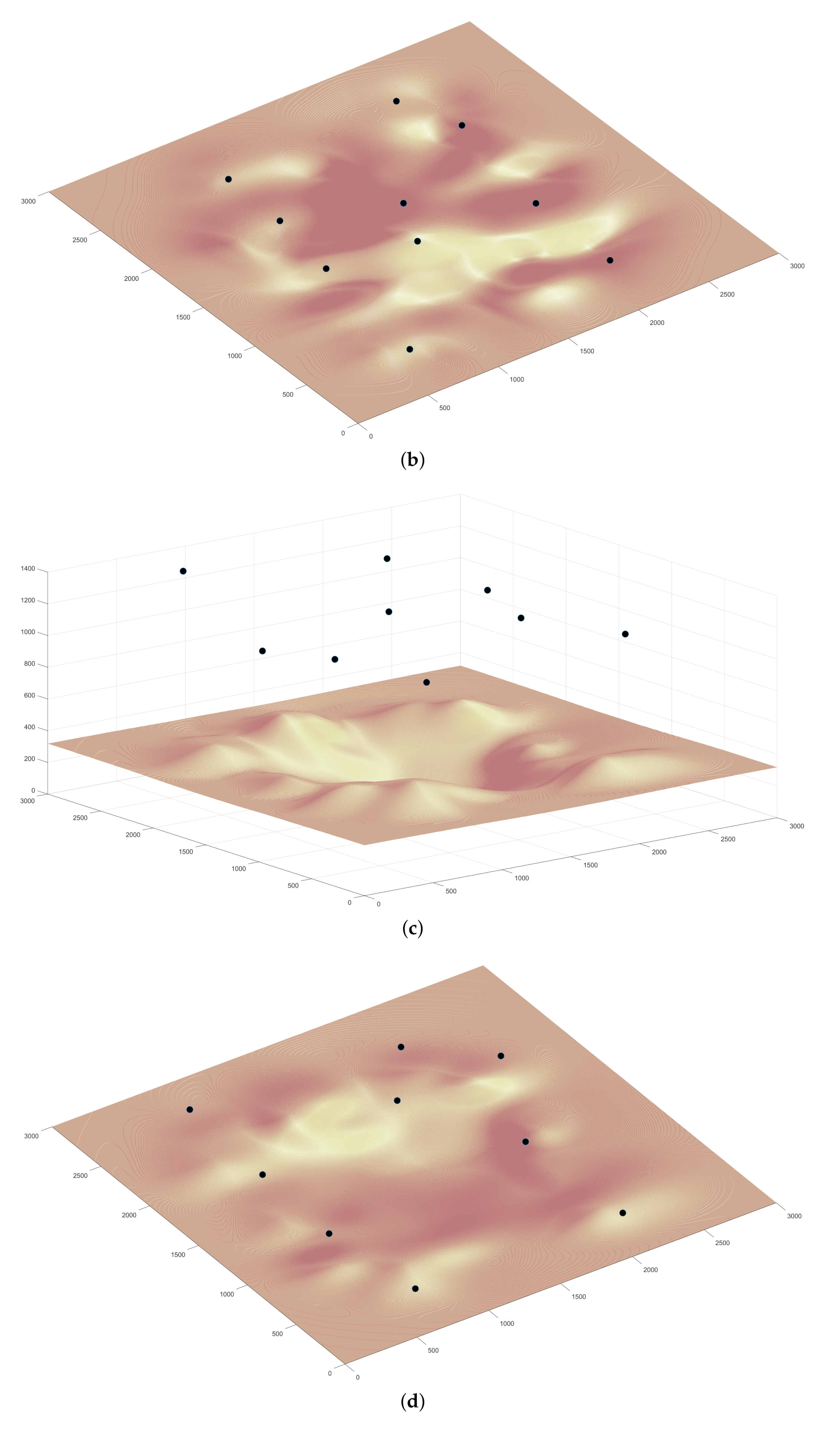
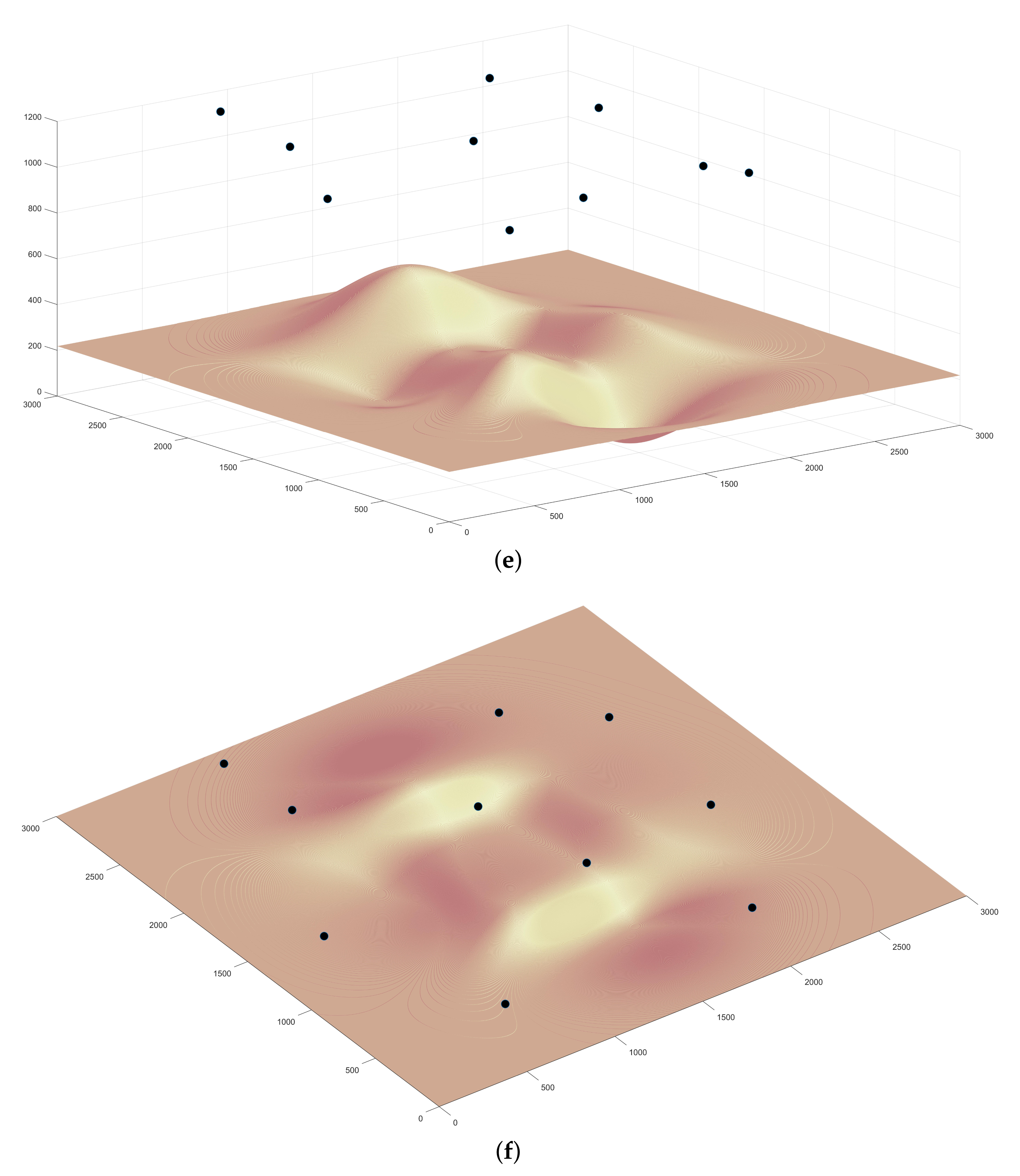
| Drone Location | Mountain | Valley | Complex |
|---|---|---|---|
| (698, 448, 1245) | (778, 425, 1127) | (751, 516, 1074) | |
| (2174, 515, 1134) | (2210, 409, 1200) | (2144, 500, 1132) | |
| (809, 1410, 1031) | (691, 1180, 1125) | (410, 1465, 1085) | |
| (1401, 1330, 1014) | (2166, 1339, 1110) | (1748, 1251, 941) | |
| (2183, 1246, 1016) | (721, 1905, 1018) | (2496, 1308, 964) | |
| (1571, 1697.5, 987) | (1797, 2110, 1045) | (1621, 1926, 1083) | |
| (890, 1969, 1096) | (2553, 2161, 1046) | (2548, 2176, 1052) | |
| (2322, 2153, 1020) | (757, 2703, 1345) | (911, 2405, 1070) | |
| (2168, 2579, 1120) | (2130, 2561, 1229) | (2160, 2505, 1176) | |
| (909, 2494, 1048) | N/A | (885, 2903, 1136) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Y.; Chen, Y. Energy-Aware Dynamic 3D Placement of Multi-Drone Sensing Fleet. Sensors 2021, 21, 2622. https://doi.org/10.3390/s21082622
Luo Y, Chen Y. Energy-Aware Dynamic 3D Placement of Multi-Drone Sensing Fleet. Sensors. 2021; 21(8):2622. https://doi.org/10.3390/s21082622
Chicago/Turabian StyleLuo, Yawen, and Yuhua Chen. 2021. "Energy-Aware Dynamic 3D Placement of Multi-Drone Sensing Fleet" Sensors 21, no. 8: 2622. https://doi.org/10.3390/s21082622
APA StyleLuo, Y., & Chen, Y. (2021). Energy-Aware Dynamic 3D Placement of Multi-Drone Sensing Fleet. Sensors, 21(8), 2622. https://doi.org/10.3390/s21082622