1. Introduction
Road network maintenance takes an extensive share of public expenditure in many countries. In the US alone, the estimated countrywide road maintenance backlog is
$420 billion [
1]; the corresponding value in Finland is €2.5 billion [
2]. The common causes of road distress include overloading, frost, use of studded tires, driving speeds, the thickness of surfacing, traffic volume, the type of surfacing material, improper or poor road surface drainage, lack of proper road maintenance, and improper design. Road distresses disturb traffic flow and safety, and cause an increase in fuel and service costs, time delays with increased pollution, and other trouble for road users.
Early identification of road distress is essential, because it provides invaluable information about the development of damage due to weathering and wear, and also offers an early warning for detecting deeper structural problems due to heavy traffic in combination with climate effects such as increased winter rain, accelerated freeze-thaw cycles and softening road foundation due to excessive water runoff. Thus, improved methodologies to allow faster and objective/reliable pavement condition data for informed and optimized pavement maintenance have potentially enormous economic and environmental benefits. Proper, timely, and selective road maintenance extends the lifespan of the pavement, reduces the cost of road maintenance, lessens vehicle damage and accidents, and minimizes sustained traffic disturbance. An automated, accurate and robust distress detection system is essential to quantify the quality of road surfaces and assist in optimizing the maintenance of the road network. The automatic detection system should be able to detect early pavement degradations, such as transverse and longitudinal cracks, potholes, rutting, road fretting, road deformation, and standing water, for minimized maintenance and timely and informed renovations.
State-of-the-art automated pavement distress detection methods are discussed in multiple reviews, such as [
3,
4,
5,
6]. In the past two decades, many research groups have been developing pavement distress detection and recognition algorithms, using 2D passive imaging systems (e.g., [
5,
7]). Over time, increasing attention has been drawn to the development of active laser-based 3D data acquisition systems for road distress mapping [
8,
9,
10,
11,
12]. Despite this fact, there are only a few published papers on measuring road rutting using mobile laser scanner (MLS). For example, MLS has been studied for off-road driving capabilities in robotics [
13] as an assisting means of navigation. Zhang et al. [
14] performed experimental tests for road distress, and briefly mentioned the possibility of rut analysis. Gézero and Antunes [
15] applied ten manually-measured road cross-sections, showing that it is possible to measure road rut depths with better accuracy than the nominal 5 mm precision of the MLS system used.
In the current operational road inspection, human raters travel all over the road measuring its distress elements, but these surveys are too laborious, slow, costly, and unsafe to perform at the scale of the whole network even if prioritized based on road class or traffic load, and they are prone to subjective errors. For example, manual rut depth measurement is performed by placing a straight edge across a rut and the distance between the straight edge and the rut bottom is measured [
16] as applied also in Gézero and Antunes [
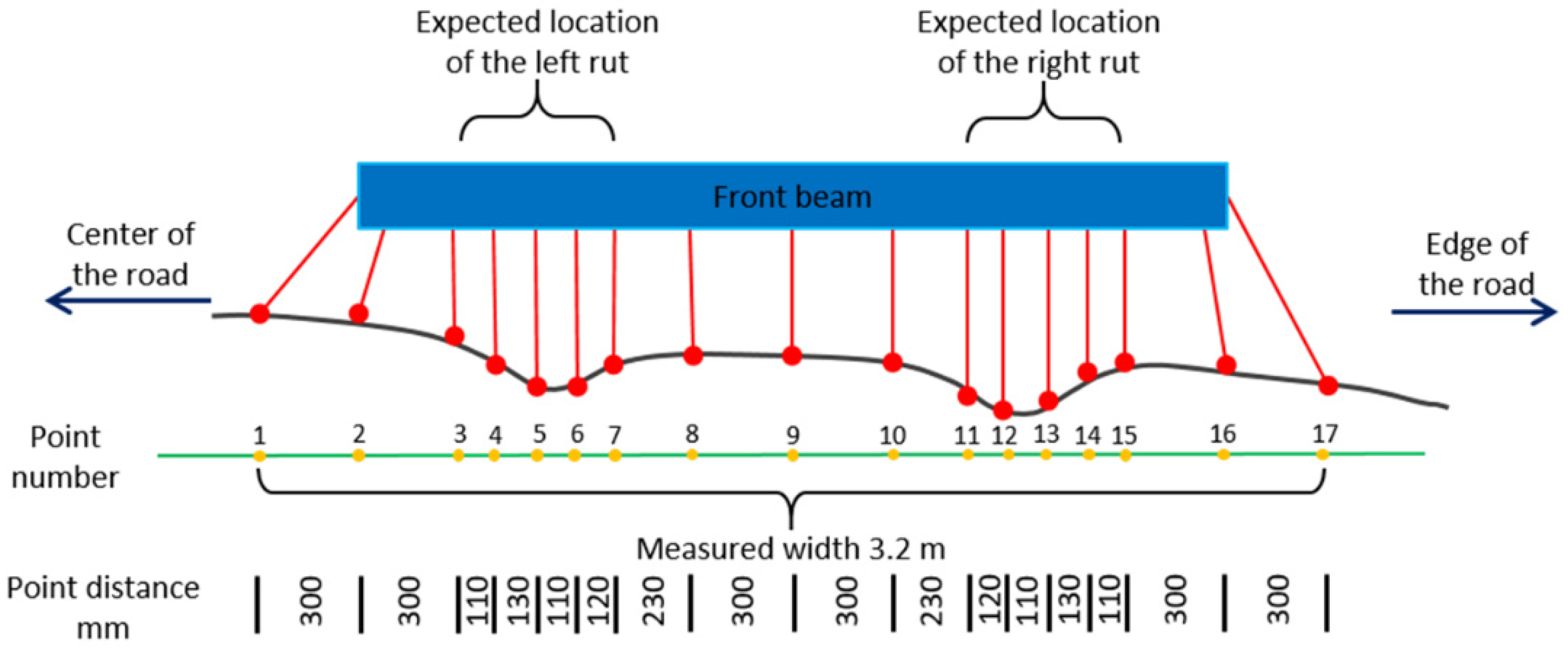
15]. Quantitative analysis of road rut depths is for the most part missing from the scientific literature due to lack of accurate and extensive field reference. Therefore, in the previous rut depth studies, reference has been very limited. Since the phenomena under our scrutiny is affected by road surface roughness (grain size of the gravel used and wear of bitumen) and laser ranging accuracy, statistical in-depth analysis are missing. This has led to the situation that road administrations are mainly using old-fashioned profilometers for rutting measurement in their operations. Profilometer laser systems typically include a fairly limited number of laser detectors (e.g., 13 or 17) installed on a bar perpendicular to the direction of the road [
17,
18,
19], as shown in
Figure 1, which further illustrates the operating principle of such a laser profilometer for rutting measurements. The shortcoming of such a special rut measuring system includes a low capability in finding the actual maximum left and right ruts due to limited point spacing across the lane. As a result, despite high range accuracy, such systems tend to underestimate the rut depths [
15]. Another shortcoming is that such systems are incapable of measuring any road distress other than ruts. While sparse sampling does not permit detection of other surface defects, it biases individual measurements, in effect leading to false rut depth estimation. Even today, such profilometer systems are considered as de facto reference for new sensors, shown recently by Virtala et al. [
19].
Additionally, there are no international standards for rut depth definition and calculation [
21]. In many countries, studded tires cause rutting, and yearly rutting measurements are needed to optimize road maintenance frequencies. In Finland, pavements are updated when rutting depth is over 15 mm, when safety of the road is suffering or when correction becomes topical. Main roads with high traffic flows are paved every 2–5 years, whereas suburban and residential streets can have 30–40 year updating cycles. All roads are classified into quality classes based on rut depth, traffic speed and volume. These classes are determined with 1 mm rut depth intervals. Rut depths are provided with 100 or 1000 m averages, and in future with 10 m averages. It can be seen that rut depths should be measured with 1 mm precision at 10 m averages, providing submillimeter accuracy on 100 m averages [
22,
23].
In our study, we incorporate several innovative elements. We will show that carefully conducted terrestrial laser scanning (TLS) measurements can be used to serve as reference data for rutting studies. To verify the accuracy of the TLS data, three validation areas with approximate sizes of 2.4 m
2 (a 1-m wide rectangle across the lane) were measured by a stereo-photogrammetric technique, which offers higher accuracy. Besides, a total of 64 one-meter-wide pavement plots across the lane are utilized for the rut depth study, which are large enough to investigate the feasibility of MLS data for rut depth. Operationally, road rut depth measurement results at 10 m intervals will be requested in the near future [
2] and we will show that MLS can provide the precision needed in operational nationwide rut measurements. We based our measurements on relatively standard but high-end MLS technology since it provides multiple use of road environment surveying data in applications beyond rutting measurements including navigation, traffic noise modeling and mitigation, nearby city 3D modeling, and in the production of high-definition (HD) maps for the needs of autonomous cars, to be discussed in
Section 4.3 of this paper.
2. Materials and Methods
2.1. Test Site
The survey area was located (60°09′46″ N, 24°32′21″ E) in the municipality of Kirkkonummi, Southern Finland, where a 3-km-long section of a two-lane regional road was selected as a test road. The speed limit in the area is between 40 and 50 km/h. This section of the road was selected because of the condition of the pavement, with a varied state of rut offering a good living laboratory for comparative measurement system analysis and computational methodology. The road pavement at the site exhibits different properties such as new and old asphalt, different depths for ruts, and various types and sizes of cracks and potholes.
2.2. Experiment Description
The road section was signaled by painting white hourglass shaped signal patterns on the road surface at the edge of the carriageway (
Figure 2) about every 50 m, on opposing sides of the road. Sixty-two signals were painted per lane, totaling 124 signals altogether. Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) measurements were performed for each signal center to serve as reference points for georeferencing and validation of MLS data, using the Topcon HIPER HR RTK GNSS system (Topcon Positioning Systems Inc., Livermore, CA, USA). The receiver was set to take five measurements per signal to compute the signal position. The purpose of the signals was to allow alignment between the point cloud datasets collected with the different instruments, enabling a comparative analysis.
Because this study focused on evaluating the accuracy of the MLS system in road pavement rut depth derivation, the MLS data had to be compared with other, assumedly more accurate, measurement methods. The purpose of the TLS measurements was to serve as reference data for MLS measurements; the purpose of the photogrammetric measurements was to verify the accuracy of the TLS data.
Since TLS and photogrammetric measurements were static, the evaluation of the TLS instrument was limited to selected study plot areas. The painted signals served as indicators for the test plots, which were defined as one-meter long and 3.5-m (width of one driving lane) wide rectangular sections around the signals for each lane. As a result, in total 64 TLS plots (1.0 m × 3.5 m) were scanned and used in this study for the analysis. Measurements by photogrammetric methods were performed to validate the TLS data on three of the pavement plots covering an approximate area of 2.4 m2 each.
2.3. Data Acquisition
2.3.1. MLS Data Acquisition
The MLS data were collected in June 2018 using the FGI Roamer-R4DW mobile mapping system developed at the Finnish Geospatial Research Institute (
Figure 3). The system provides kinematic 3D laser scanning measurements, and panoramic imagery, at high resolution, enabling mapping and modeling for road asset management. Roamer-R4DW consists of two profiling scanners (the first is used in the experiment in this paper), a positioning system mounted on a modular aluminum truss structure for versatility and a high sensor elevation for enhanced visibility behind street-side objects. The two 2D scanners mounted on Roamer-R4DW were Riegl VUX-1HA and Riegl miniVUX-1UAV (RIEGL Laser Measurement Systems GmbH, Horn, Austria) (referred to as VUX and miniVUX in the following), operating at two distinctive wavelengths, 1550 and 905 nm, respectively. Correspondingly, the beam divergences were 0.5 mrad and 0.5 × 1.6 mrad, while the ranging accuracy specifications were 5 mm and 15 mm for 3 mm and 10 mm precision, respectively.
The positioning subsystem consists of a NovAtel ISA-100C inertial measurement unit (IMU) and a Pwrpak7 global navigation satellite system (GNSS) receiver to obtain the position and orientation of the sensors as a function of time. The IMU output data rate was 200 Hz, and GNSS range observations were recorded at 5 Hz. The trajectory solution is typically computed in multi-pass differential post-processing to obtain the best accuracy possible at the given GNSS constellation during the survey and the environment, specifically in terms of GNSS visibility.
The test area was driven once in both directions for MLS data calibration, but only the data collected on the eastbound lane was used in this study. The average driving speed during the measurements was 40 km/h. The scan settings used were 250 and 100 LPS (lines per second), and 1017 and 100 kHz PRF (pulse repetition frequency) for the VUX and miniVUX, respectively. At the given speed, this resulted in about 44 mm and 111 mm profile spacings for the respective scanner data (i.e., ~22 and ~9 lines per each 1 m wide validation plot). Point spacing along the profile was 4.3 mm immediately below the VUX scanner at a minimum distance of about 2.9 m from the road surface, which corresponded to the actual laser beam spot size at the same distance. The general point density on the road surface was approximately 5000 points/m2 in the middle of the lane immediately behind the measurement vehicle. For miniVUX at 2.7 m above the road surface, the corresponding point spacing was 17 mm, and the density was about 500 points/m2. Beam size was not specified for short ranges, but was expected to be similar to that of VUX, although slightly elliptical in shape. However, miniVUX data was not used in this study.
2.3.2. TLS and Photogrammetric Measurements
TLS measurements were performed using the FARO Focus S 350 (FARO Technologies, Inc., Lake Mary, FL, USA). The scanner uses the phase-shift principle for measuring distances. Its measurement speed is up to 976,000 points/second. It has a ranging accuracy of ± 1 mm, and it uses 1550 nm wavelength. The field of view (FOV) for the scanner is 360° in the horizontal axis, and 300° in the vertical axis. For this study, scanning parameters were set to provide a point spacing of 7.7 mm in both vertical and horizontal directions at a distance of 10 m from the scanner, resulting in 2.3 mm point spacing on the plot road surface. The measurement time for a single scan was approximately three minutes. The scanner was mounted on the roof rack of the car so that the blind spot of the scanner was pointing in the driving direction, allowing full visibility of the road surface below the scanner (see
Figure 4A). During the TLS measurement, the vehicle was stationary in the center of the lane, placing the scanner about 2.8 m above the plot (
Figure 4B). The aim of this setup was to get the scanner as close as possible to the plot area so that the point density remained as high as possible and to ensure that the whole plot was fully visible for the scanning. The measurement was then repeated for each plot. The point density for the measured plots was about 150,000 points/m
2. Stationary TLS measurements were performed at night between 11 PM and 5 AM, when the traffic flow was minimal, and there was no heavy vehicle traffic. This was to ensure that passing vehicles did not cause the measuring system to move, and measurements could be carried out with minimum disturbance to the public.
Photogrammetric measurement was conducted with a custom-built and automatically operated stereo camera system (
Figure 4C). The system was built around Nikon D850 cameras equipped with Sigma Art 50 mm 1.4 G prime lenses. The cameras were mounted on a remotely controlled and electronically operated camera rig. The average ground sampling distance (GSD) of the three plots varied between 0.079 and 0.100 mm. The mean reprojection error varied between 0.090 and 0.116 pixels. All the image blocks were processed without 3D control points. The scale of the blocks was determined by utilizing eight scale bars in each block. The sigma of the scale varied between 0.014 mm and 0.021 mm. 3D point densities on the test plots varied between 163 and 230 points/mm
2.
2.4. MLS Data Pre-Processing
The pre-processing of the MLS data had three steps: (1) trajectory computation; (2) MLS system calibration; and (3) point cloud georeferencing.
The trajectory, i.e., the measurement path of the MLS, was computed using the NovAtel Waypoint Inertial Explorer (version 8.80) (NovAtel Inc, Calgary, AB, Canada). For the differential GNSS, we used a virtual GNSS base station generated at the site from the Trimnet service (Geotrim Oy, Vantaa, Finland). The 1 Hz virtual base station data were interpolated to meet the 5 Hz records of the Roamer-R4DW positioning system. A 15-degree elevation angle was used to reduce multipath effects in the GNSS signals, and the static initialization method was used for the IMU. The final trajectory was computed in a multi-pass process with three forward and reverse computations, and the solutions were combined and smoothed for the final result.
The trajectory data were associated with the raw laser scanning data (18 leap seconds were also applied to match the time systems), and initial system internal bore-sight parameters (three translations and rotations between the system IMU and each scanner) were applied. The initial point cloud was then generated using RiProcess software. After this step, we ran a scan alignment tool in the RiProcess to improve the initial bore-sight rotations for mounting, but the translations were considered as known parameters. Robust distance weighted estimation was used to solve the parameter values for planar features automatically extracted from the point cloud data and matched at locations with data from multiple visits. After solving the fine-tuned orientation bore-sight parameters, we generated the final point cloud for rut study method development and rut depth analysis.
The trajectory accuracy was estimated in the post-processing software by computing the mean, standard deviation, and the root mean square (RMS) in the 3D position and the attitude (square root of the mean value of the squared observed values, e.g., differences in position and attitude between the forward and reverse trajectory solutions to their combined and smoothed solution) over the timespan of the data. The estimated position mean accuracy was 4.5 mm with 1.2 mm standard deviation. The corresponding RMS was 4.6 mm. The average attitude accuracies were −0.0711, −0.0687, and −0.3139 arcminutes for Roll, Pitch, and Yaw, respectively. The corresponding standard deviations were 0.0584, 0.0286, and 0.2193 arcminutes, and the RMS values 0.0920, 0.0744, and 0.3829 arcminutes for Roll, Pitch, and Yaw. The Yaw/Heading angle uncertainty dominates the solution, but the effect of this at a range of 10 m from the scanner (Yaw RMS) results in 1.1 mm point displacement, and the maximum absolute uncertainty (0.8179) yields a 2.4 mm spatial error.
The bore-sight calibration resulted in 7800 planar pair matches and, eventually, a 10.2 mm error (standard deviation) in the estimation. The values applied to the final data georeferencing were −0.03501, −0.03877, and −0.18758 for Roll, Pitch, and Yaw, respectively. The plot of the histogram of the residuals (
Figure 5) shows that the majority of the observations were within 30 mm around the mean (note the logarithmic scale of the plot), and the orientation of the observations was well distributed for a reliable solution.
The pre-processed MLS data were compared against RTK measurements at the targets on the road, clearly visible in the reflectance data from the scanners, and the study concluded that the MLS positioning system was sufficiently accurate for georeferencing. The RTK measurements were used to confirm the success of the georeferencing with the MLS system. Subsequently, the data measured by the other instruments for the study were georeferenced with the MLS data: the TLS data were georeferenced in CloudCompare (version 2.10.2,
http://www.cloudcompare.org/ (accessed on 15 January 2021)), using the georeferenced MLS data, and the photogrammetric data were aligned with the georeferenced TLS data using the same software.
Test plots were created in Bentley MicroStation (v.10.00.00.25) by cutting the data from the road surface into one-meter wide slices (
Figure 6) according to the MLS scan profiles. The scan profile pattern of the pavement seen at the top of
Figure 6 was formed when the scanner mirror rotated at high speed (each mirror rotation creates one scan profile) while the car was moving forward. The scan plane was slightly tilted to a 15-degree nominal angle, as can be seen in
Figure 3. The rotation speed of the scanner and driving speed determined the space between two scanning profiles. The number of scan profiles within the plots therefore varied between 19 and 22. An illustration of the scan profiles from Plot 2 can be seen in
Figure 6, where the MLS point cloud contains 22 scan profiles for the particular plot.
2.5. TLS Preprocessing and TLS Accuracy as Reference
To evaluate the accuracy of the TLS measurement, the photogrammetric and TLS data were aligned using CloudCompare’s registration tools, followed by the use of the Cloud-2-Cloud (C2C) distance comparison tool. C2C is a method in which distances between predetermined reference point clouds and corresponding point clouds are calculated. The method can be used to detect changes between point clouds, and it can also be used to evaluate accuracy when the method is combined with CloudCompare’s Local Statistical Test (LST) tool. Here, the C2C tool calculates distances between two point clouds from the same area, after which the LST tool draws a histogram of the distances between each point pair and calculates a Gaussian distribution, providing the mean distance and standard deviation for each plot.
The RMS value for TLS and MLS data alignment (3D distances between the two datasets) for each plot was between 4 and 7 mm, depending on the road environment; georeferencing was usually more accurate when there were also corresponding points from objects above the pavement, such as streetlamps, fences, and road signs. TLS and photogrammetric datasets were aligned using the same method as TLS and MLS. Here, the RMS value for registration was around 0.5 mm for all the three validation plots.
The TLS accuracy was evaluated using photogrammetric data and by using the cloud-to-cloud (C2C) distance tool in CloudCompare. The mean absolute C2C distances between the TLS and photogrammetric point cloud were 0.85 mm (±0.47 mm, standard deviation) for Plot 1, 0.82 mm (±0.50 mm, standard deviation) for Plot 2, and 0.72 mm (±0.39 mm, standard deviation) for Plot 3 (
Figure 7). Thus, better than 0.5 mm precision for TLS was confirmed.
The TLS scan pattern was much denser than the MLS point cloud (see
Figure 6 and
Figure 8 for reference) and, as the 3D scan was stationary, the scan pattern on the ground in general differed from that of the MLS. The normally vertical rotation axis of the TLS scanner was tilted 75 degrees backward, and while the scanner rotated across the lane, the scanning mirror cast scan profiles roughly oriented along the longitudinal axis of the road. Given the scan settings and the approximate 2.8 m distance to the road surface, the average point spacing within the plot was approximately 2.3 mm.
To generate a high-accuracy rut depth reference, down-sampling of the TLS data was performed to generate road profiles at the locations of the profiles generated by the MLS. The down-sampling was conducted by averaging the neighboring TLS data around the MLS data. More specifically, at the position of each MLS point, the surrounding TLS points were selected within a horizontal distance of 5 mm (black circle in
Figure 8). The z coordinates of the down-sampled TLS points were the average elevation values within the neighborhood, and the horizontal coordinates were equal to those of the corresponding MLS data. In this way, the rut depth estimation with TLS data and MLS data can be performed at exactly same locations, which help avoid possible variation errors introduced by location. The down-sampling matches TLS data with MLS data to guarantee accurate TLS reference (
Figure 9).
2.6. Applied Signal Processing and Statistical Methods
A digital low-pass filter, which only allows a signal with a frequency of less than the preset cut-off frequency to pass [
24,
25], was applied to reduce data noise, therefore eliminating short-term fluctuation in the ruts. Low-pass filters can be designed with various algorithms, and in our study a finite impulse response filter with a Hamming window was applied [
26], in which the two most important factors were the filter order and the cut-off frequency. Similar filters were applied to both the MLS and the down-sampled TLS data, while the filter order, which determined the filter window length, was 25 for the MLS data, and 15 for the TLS data.
In addition, some statistical tools were used to assess the performance of the MLS rut depth analysis. The bias, random error, and root-mean-square error (RMSE) of a variable
are evaluated using the following equations:
where
is the number of observations,
is the observation, and
is the reference value. Variable
is the difference between the observation and reference value.
The corresponding relative bias (
) and RMSE (
) are defined as follows:
where
is the mean reference value, which is defined as
5. Conclusions
To decrease the costs of road and road environment surveys, and increase the multiple use of road environment surveying data, it would be beneficial to be able to conduct all road related measurements with a single MLS survey. In this paper, the pavement rut depth and road slope measurement capability of an MLS system was investigated using terrestrial laser scanning (TLS) measurements as a reference. To verify the accuracy of TLS data, the TLS data were analyzed with geometric models obtained with stereophotogrammetry, resulting in standard deviations less than 0.5 mm for the verification plots. The MLS and TLS data were collected in a short time interval, and in total 34 one-meter-long road plots were qualified for evaluation in the end. Using the implemented fully automatic rut analysis, we found that the bias and random errors were 0.66 mm and 1.4 mm for the rut depth estimation using Roamer-R4DW MLS (based on Riegl VUX-1HA). The mean error of the crossfall measurements of the road surface was −0.0153%, with a standard deviation of 0.0257%.
The results proved that rut depth and crossfall slope measurements using MLS are highly accurate and feasible for operational application in many countries especially in busy roads where maintenance cycles are short. This offers the potential to develop a mobile road surface management system supporting various road environment applications with a high level of automation, and the possibility to use commercial off-the-shelf (COTS) LiDAR sensors for road asset inventories.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















