An Aided Navigation Method Based on Strapdown Gravity Gradiometer


Abstract
1. Introduction
2. Basic Equations of Strapdown Inertial Navigation System
3. Measurement Principle of Gravity Gradiometer
4. Gravity Gradiometer Aided Navigation Method (GGAN Method)
5. Performance Analysis
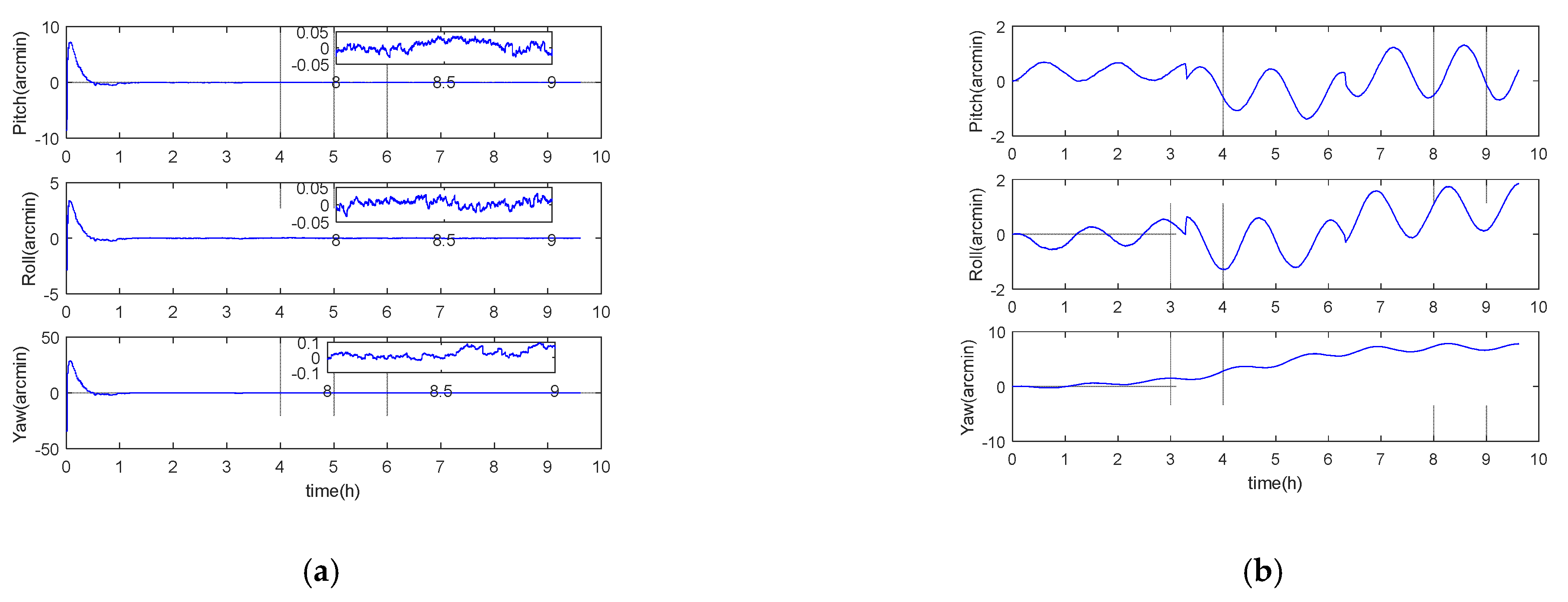
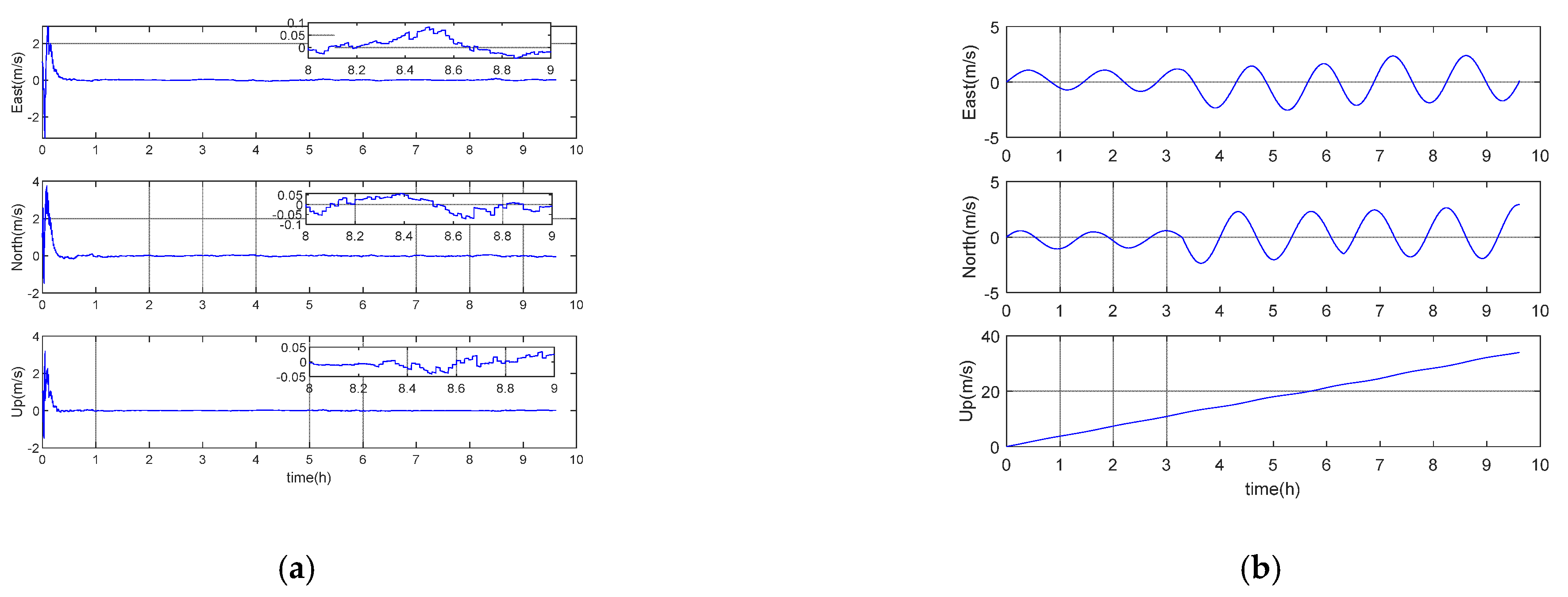
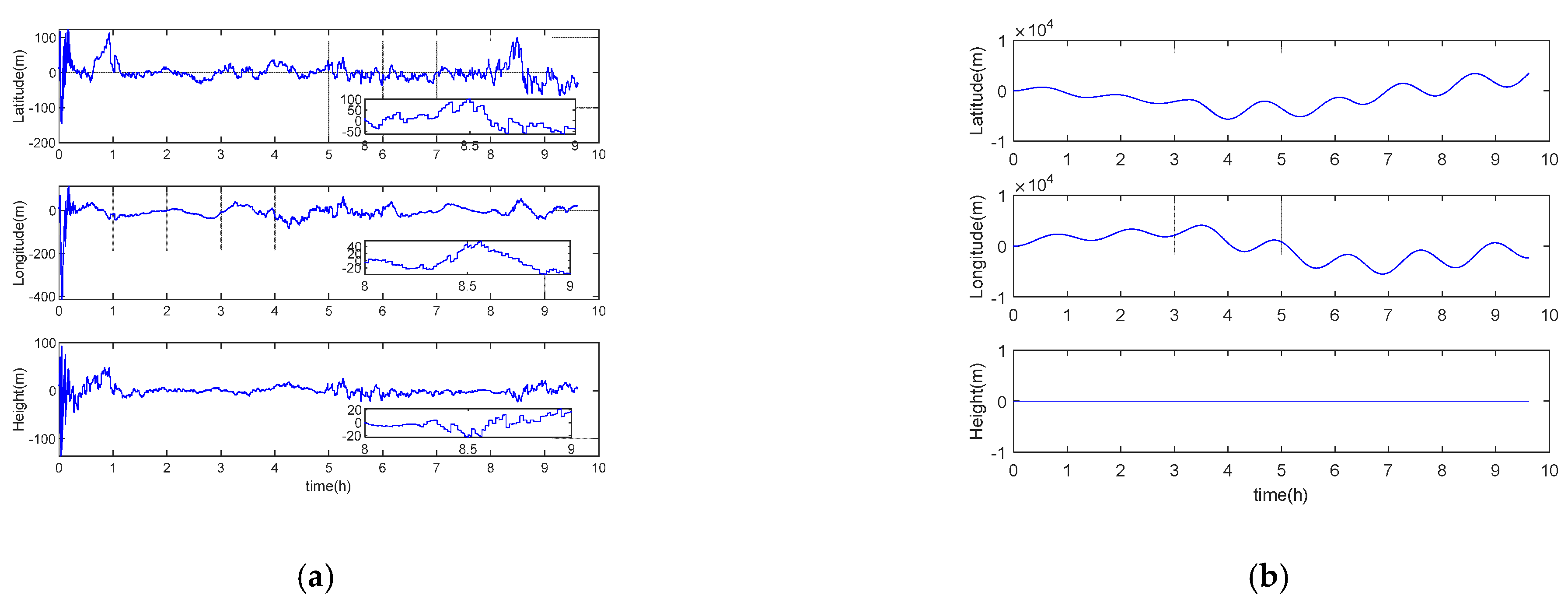
5.1. Performance Analysis under Long Voyage Condition
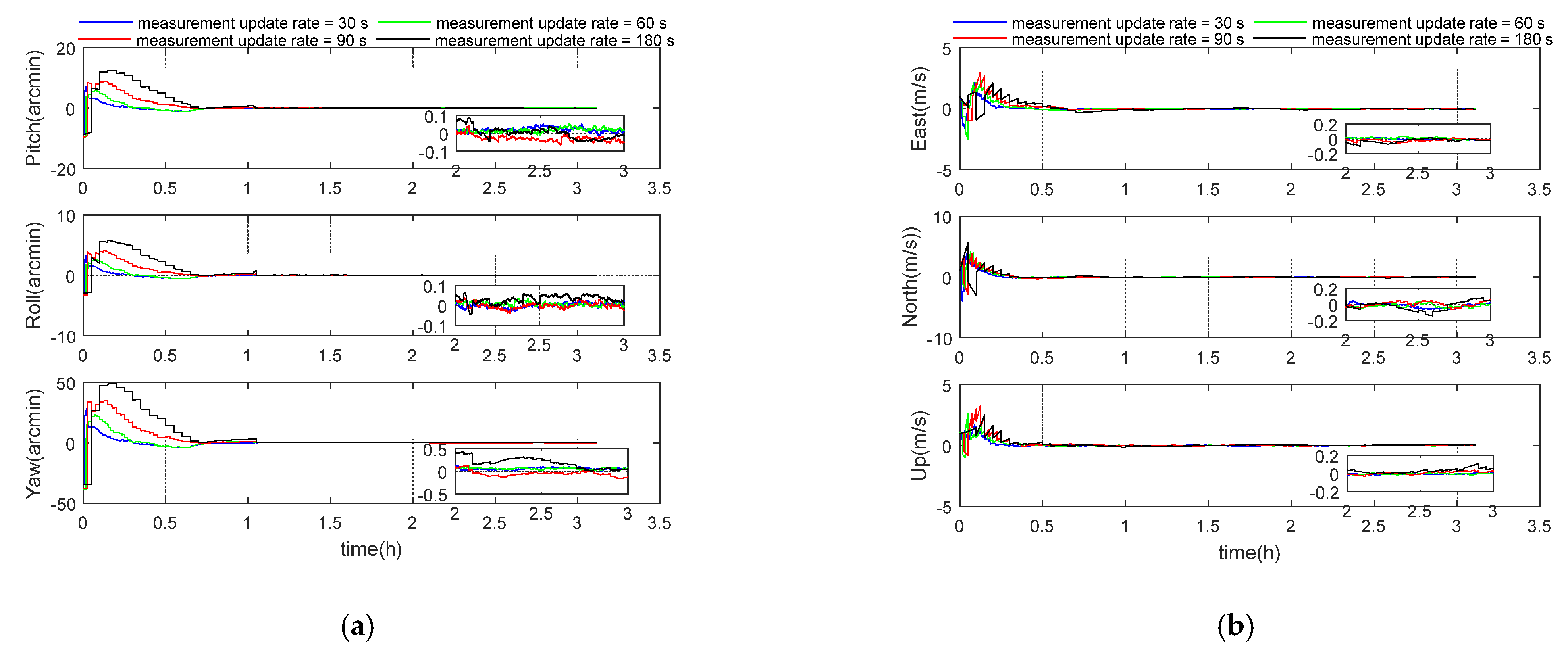
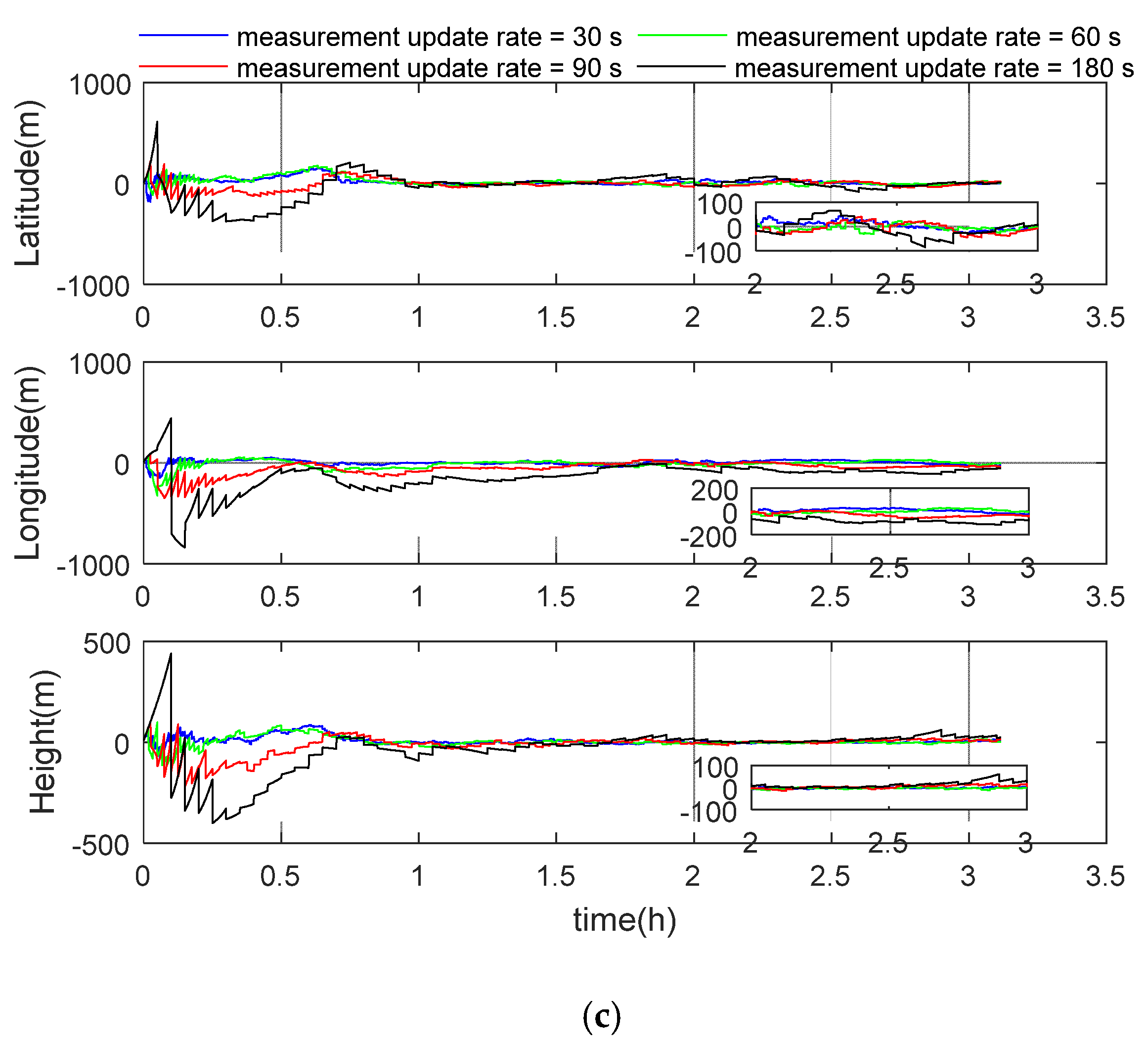
5.2. Performance Analysis of Measurement Update Period
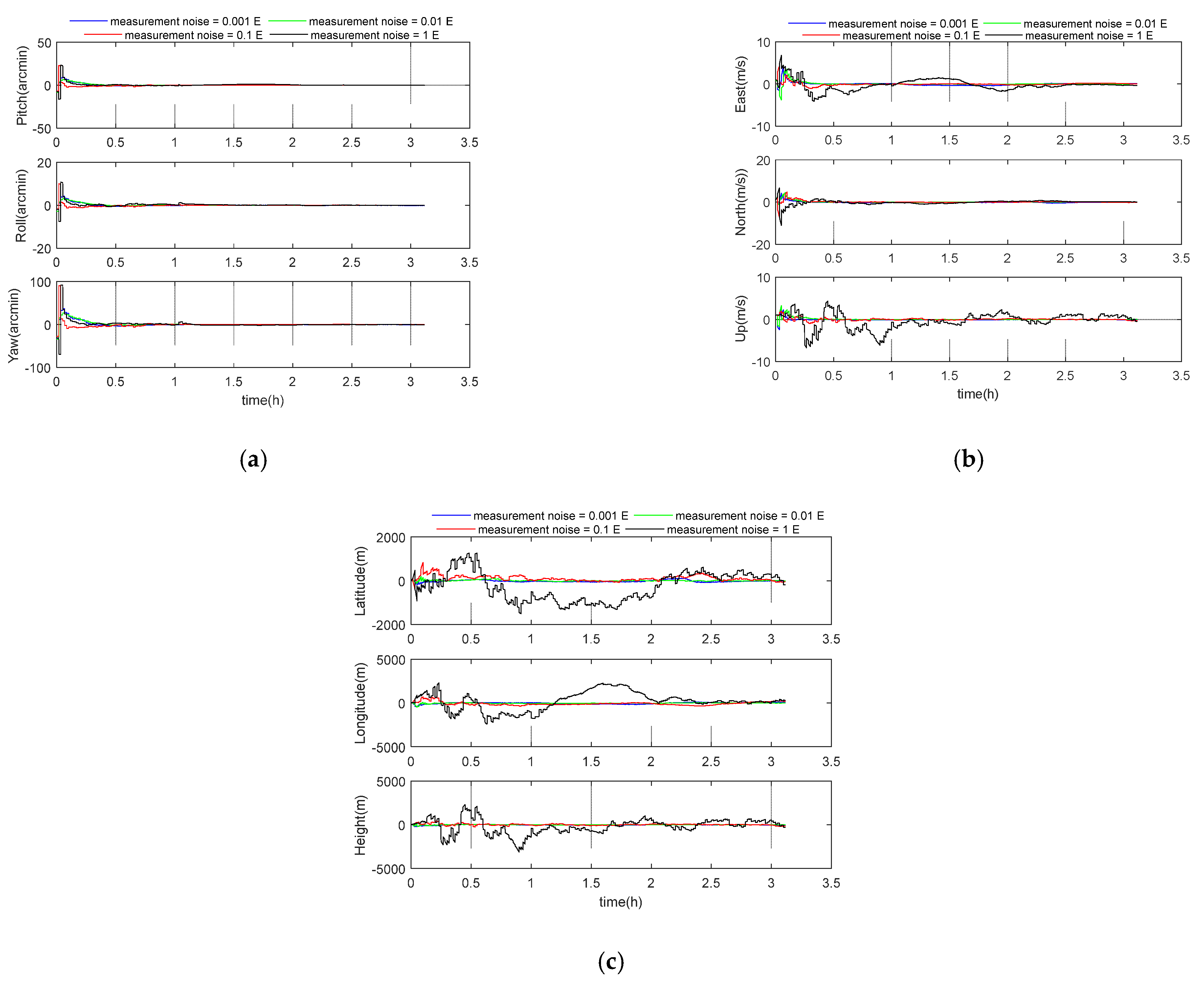
5.3. Performance Analysis of Measurement Noise
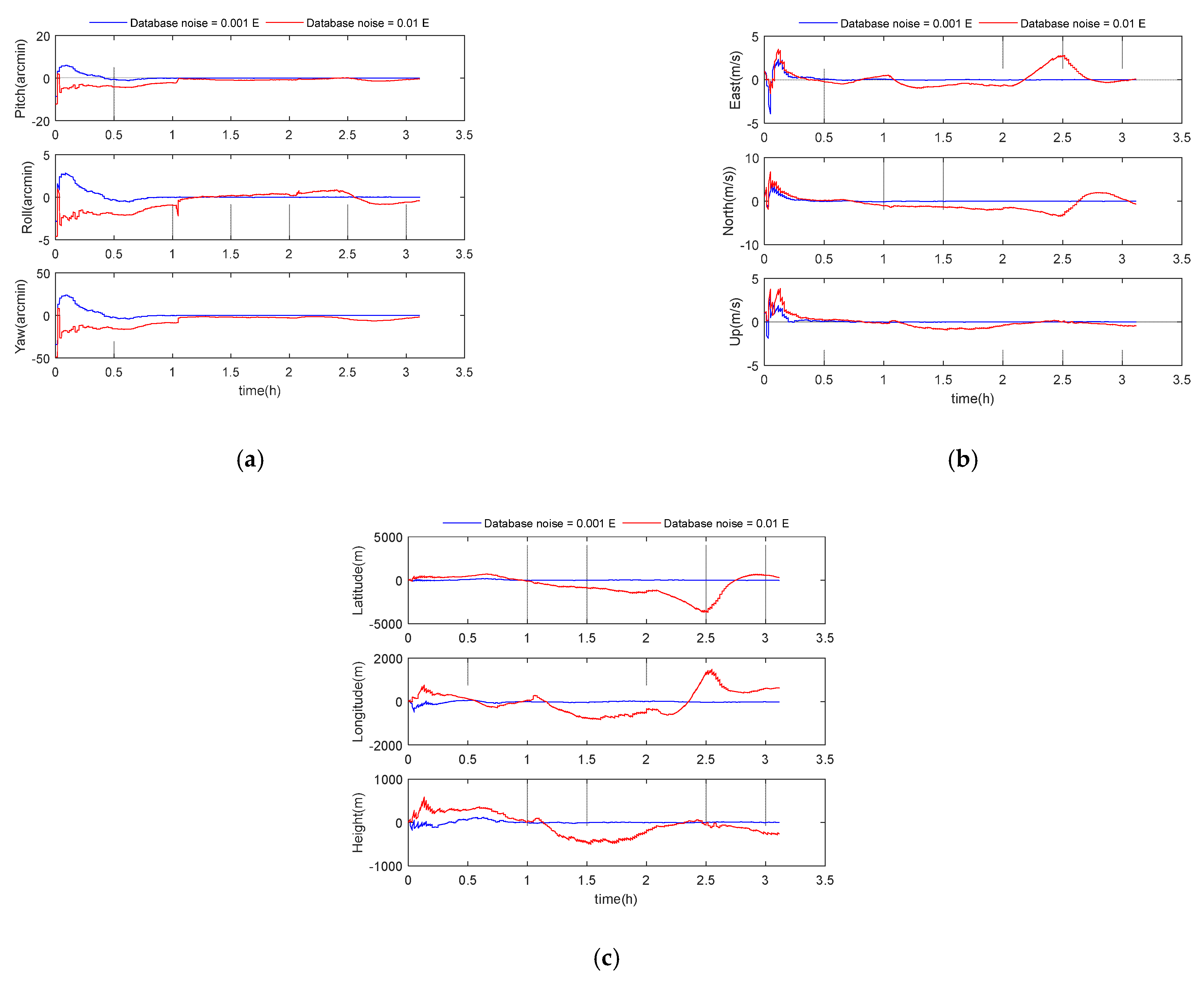
5.4. Performance Analysis of Database Noise
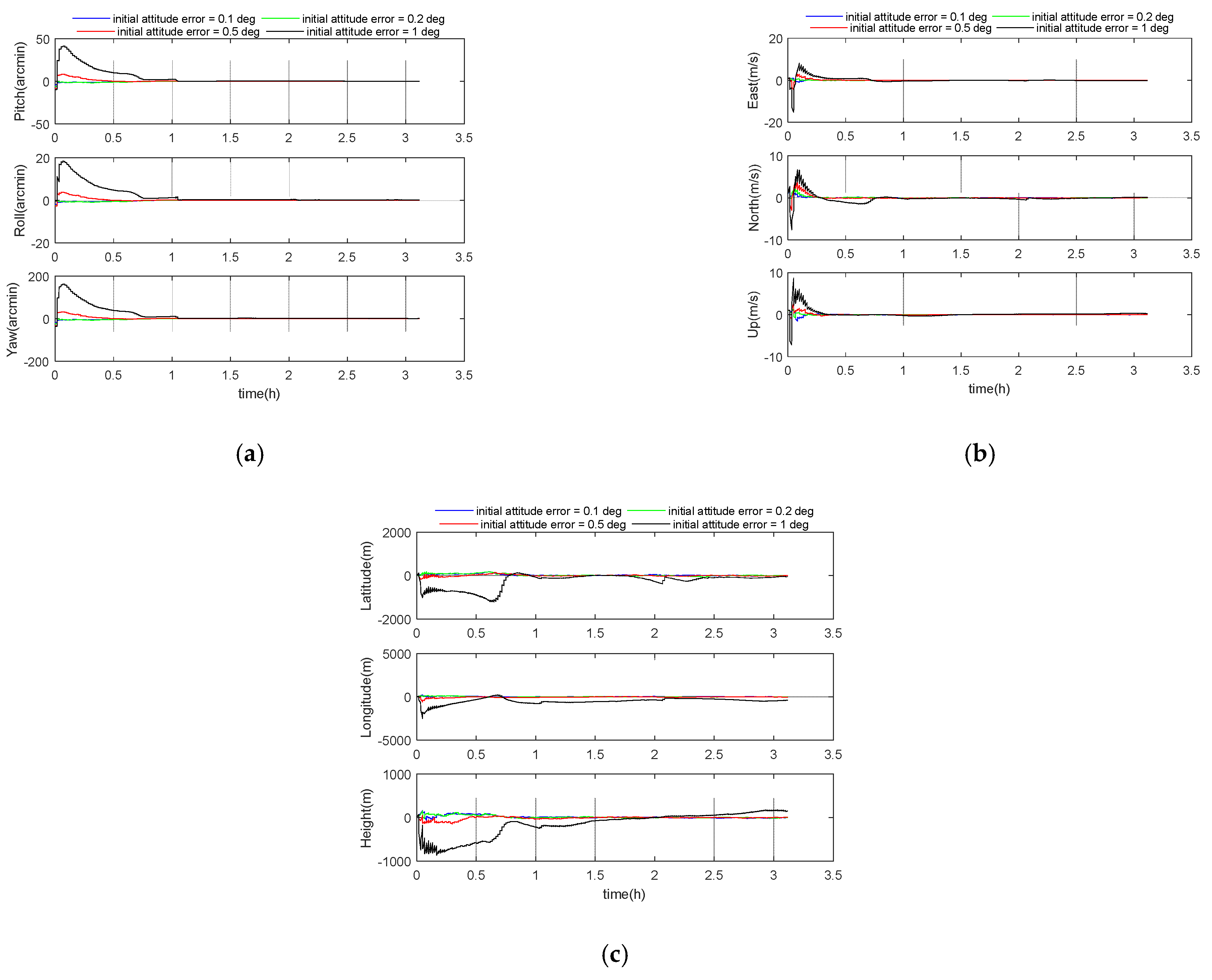
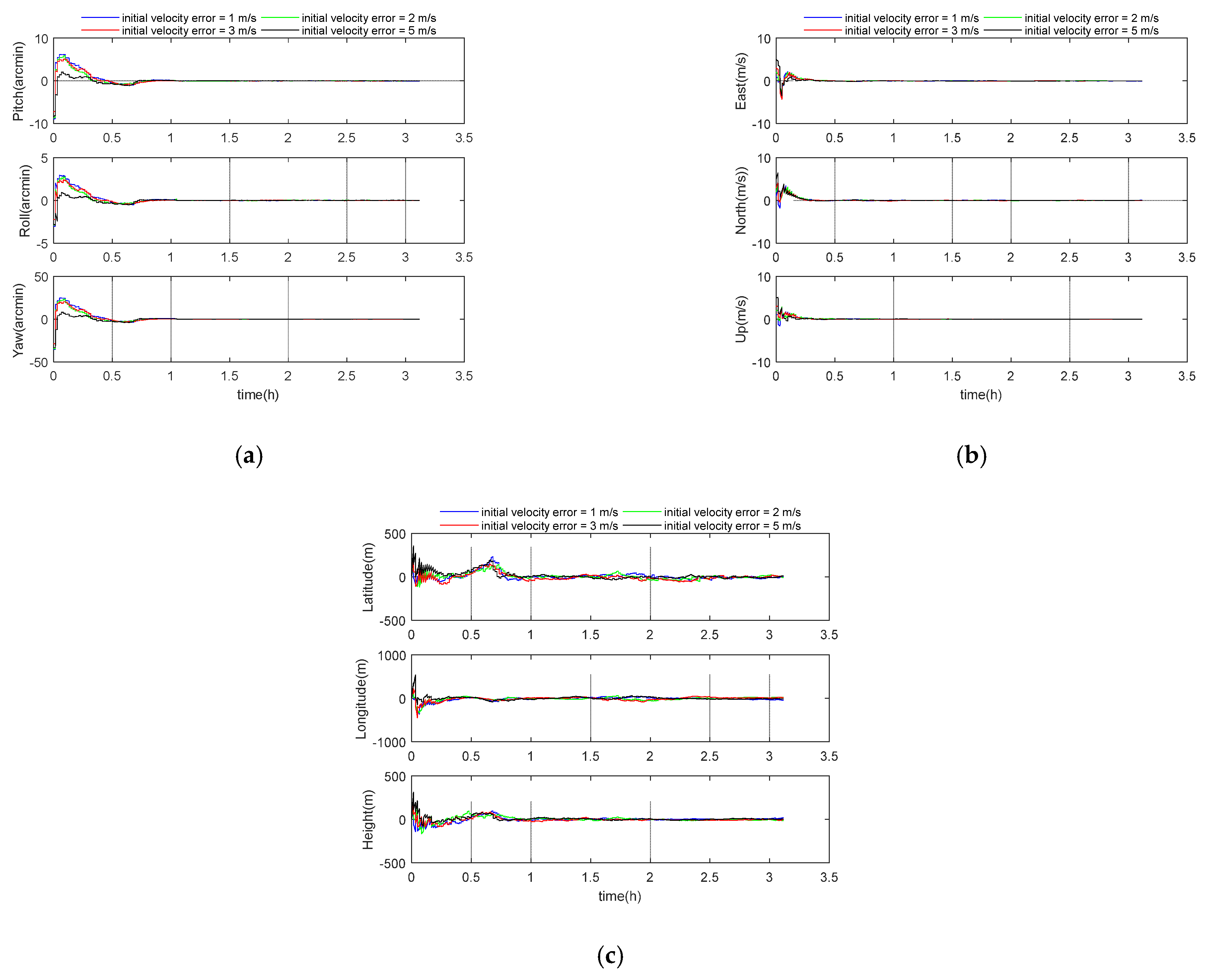
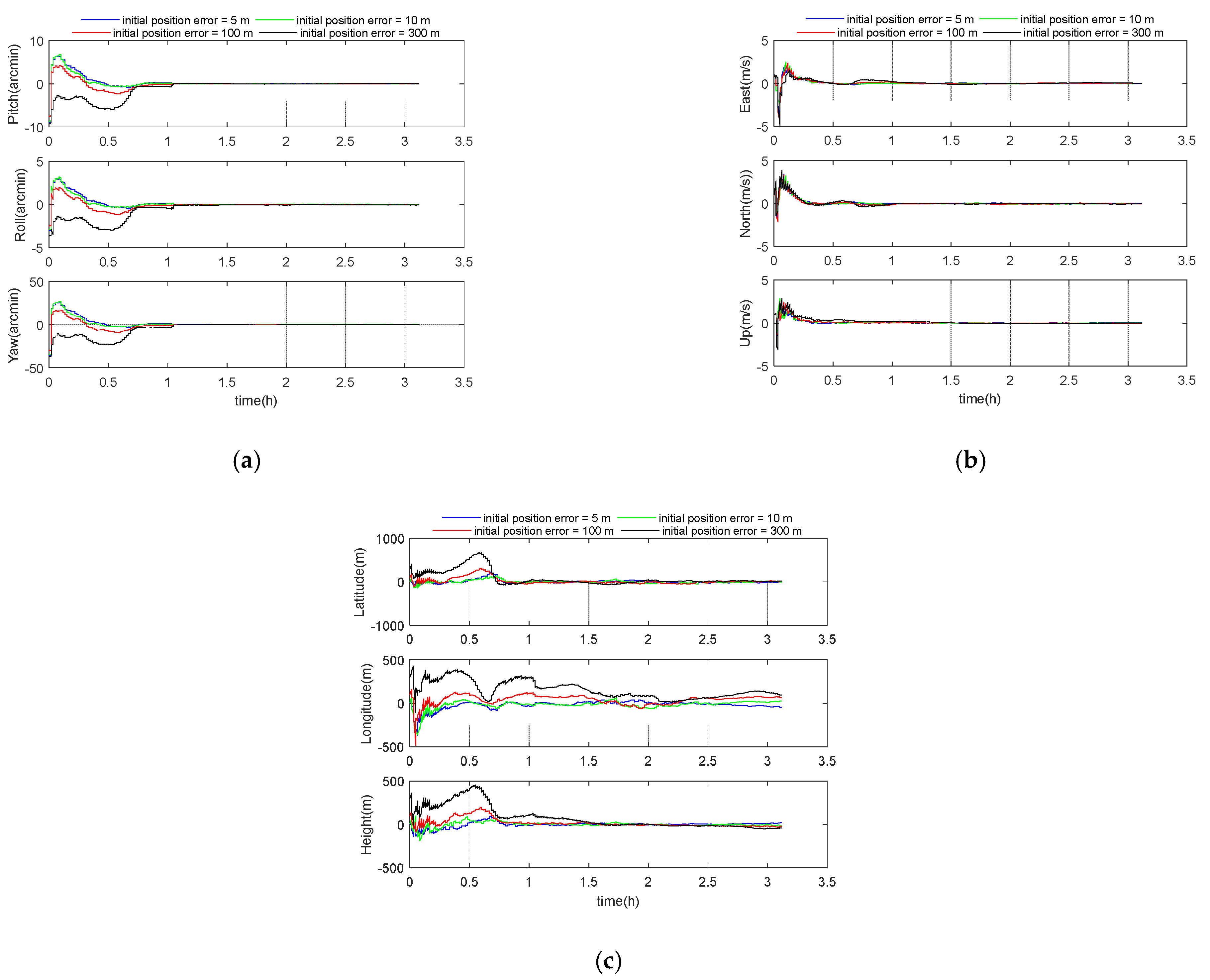
5.5. Performance Analysis of Initial Errors
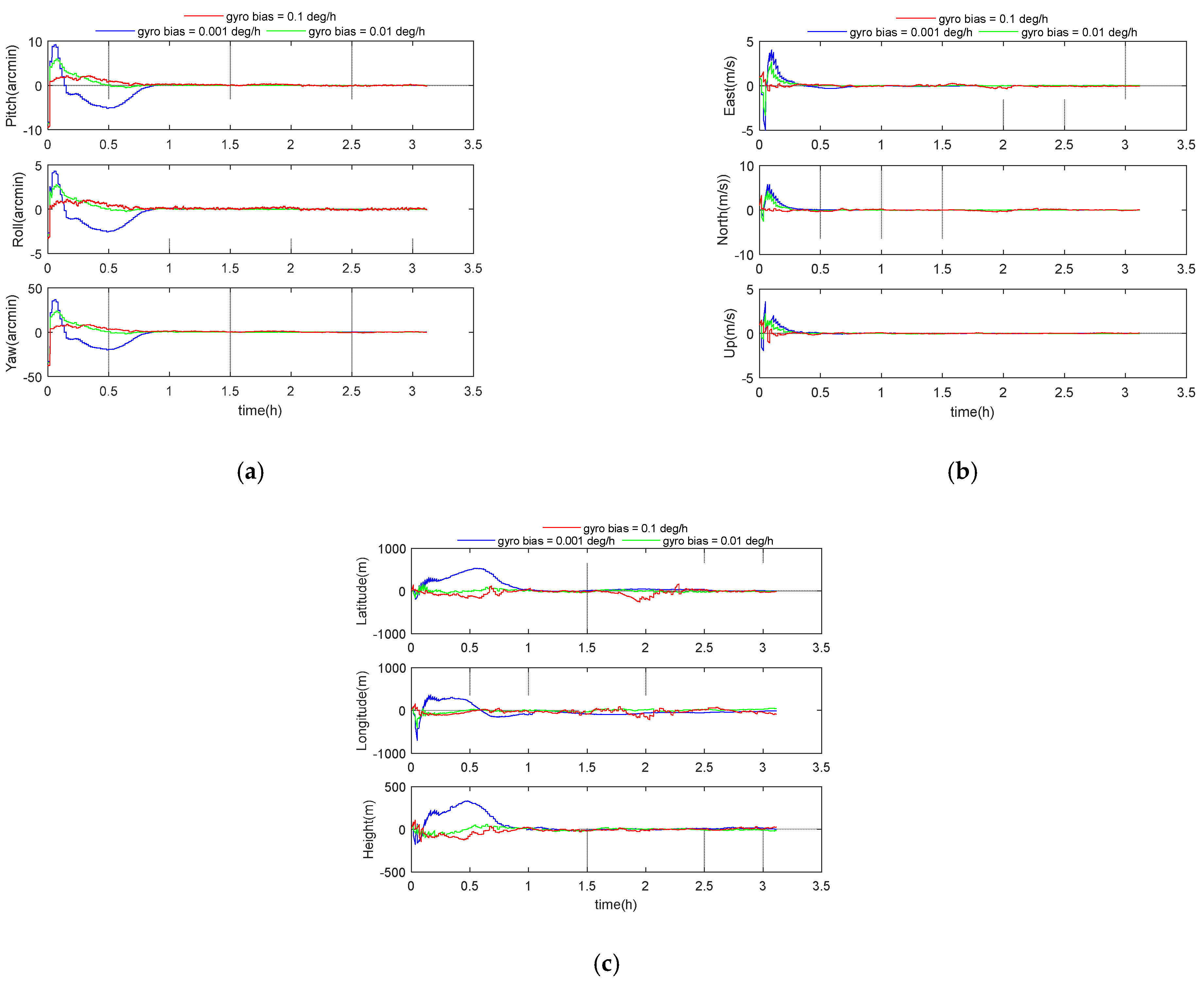
5.6. Performance Analysis of Inertial Navigation Level
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Moryl, J.; Rice, H.; Shinners, S. The universal gravity module for enhanced submarine navigation. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium (Cat. No.98CH36153), Palm Springs, CA, USA, 20–23 April 1996; pp. 324–331. [Google Scholar]
- Vajda, S.; Zorn, A. Survey of existing and emerging technologies for strategic submarine navigation. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium (Cat. No.98CH36153), Palm Springs, CA, USA, 20–23 April 1996. [Google Scholar]
- Rice, H.; Mendelsohn, L.; Aarons, R.; Mazzola, D. Next generation marine precision navigation system. In Proceedings of the IEEE 2000. Position Location and Navigation Symposium (Cat. No.00CH37062), San Diego, CA, USA, 13–16 March 2000. [Google Scholar]
- Hays, K.M.; Schmidt, R.G.; Wilson, W.A.; Campbell, J.D.; Gokhale, M.P. A submarine navigator for the 21st century. In Proceedings of the 2002 IEEE Position Location and Navigation Symposium (IEEE Cat. No.02CH37284), Palms Springs, CA, USA, 15–18 April 2002. [Google Scholar]
- Karshakov, E.; Pavlov, B.; Papusha, I.; Tkhorenko, M. Promising Aircraft Navigation Systems with Use of Physical Fields: Stationary Magnetic Field Gradient, Gravity Gradient, Alternating Magnetic Field. In Proceedings of the 2020 27th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 25–27 May 2020; pp. 1–9. [Google Scholar]
- Karshakov, E. Iterated extended Kalman filter for airborne electromagnetic data inversion. Explor. Geophys. 2020, 51, 66–73. [Google Scholar] [CrossRef]
- Peshekhonov, V.G.; Sokolov, A.V.; Zheleznyak, L.K.; Bereza, A.D.; Krasnov, A.A. Role of Navigation Technologies in Mobile Gravimeters Development. Gyroscopy Navig. 2020, 11, 2–12. [Google Scholar] [CrossRef]
- Volkovitskii, A.K.; Karshakov, E.V.; Tkhorenko, M.Y.; Pavlov, B.V. Application of Magnetic Gradiometers to Control Magnetic Field of a Moving Object. Autom. Remote Control 2020, 81, 333–339. [Google Scholar] [CrossRef]
- Soken, H.E.; Hajiyev, C. UKF-Based Reconfigurable Attitude Parameters Estimation and Magnetometer Calibration. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2614–2627. [Google Scholar] [CrossRef]
- Junji, G.; Xingle, Z.; Wubing, Z. Accurate calculating method of marine three-component geomagnetic field in shipboard measurement. In Proceedings of the 2015 Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2015; pp. 1504–1507. [Google Scholar]
- Tippenhauer, N.O.; Pöpper, C.; Rasmussen, K.B.; Capkun, S. On the requirements for successful GPS spoofing attacks. In Proceedings of the 18th ACM Conference on Computer Supported Cooperative Work & Social Computing; Association for Computing Machinery (ACM), Chicago, IL, USA, 17–21 October 2011; pp. 75–86. [Google Scholar] [CrossRef]
- Affleck, C.; Jircitano, A. Passive gravity gradiometer navigation system. In Proceedings of the IEEE Symposium on Position Location and Navigation. A Decade of Excellence in the Navigation Sciences, Las Vegas, NV, USA, 20 March 1990; pp. 60–66. [Google Scholar]
- Yan, Z.; Ma, J.; Tian, J. Accurate Aerial Object Localization Using Gravity and Gravity Gradient Anomaly. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1214–1217. [Google Scholar] [CrossRef]
- Evstifeev, M.I. The state of the art in the development of onboard gravity gradiometers. Gyroscopy Navig. 2017, 8, 68–79. [Google Scholar] [CrossRef]
- Evstifeev, M.; Elektropribor, J.C.C. Dynamics of Onboard Gravity Gradiometers. Giroskopiya Navig. 2019, 27, 69–87. [Google Scholar] [CrossRef]
- Tang, J.; Hu, S.; Ren, Z.-Y.; Chen, C. Localization of Multiple Underwater Objects with Gravity Field and Gravity Gradient Tensor. IEEE Geosci. Remote Sens. Lett. 2018, 15, 247–251. [Google Scholar] [CrossRef]
- Boddice, D.; Metje, N.; Tuckwell, G. Quantifying the effects of near surface density variation on quantum technology gravity and gravity gradient instruments. J. Appl. Geophys. 2019, 164, 160–178. [Google Scholar] [CrossRef]
- Richeson, J.A. Gravity gradiometer aided inertial navigation within non-GNSS environments. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007. [Google Scholar]
- Sun, X.; Chen, P.; Macabiau, C.; Han, C. Autonomous orbit determination via kalman filtering of gravity gradients. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2436–2451. [Google Scholar] [CrossRef]
- Lee, J.; Kwon, J.H.; Yu, M. Performance Evaluation and Requirements Assessment for Gravity Gradient Ref-erenced Navigation. Sensors 2015, 15, 16833–16847. [Google Scholar] [CrossRef]
- Liu, F.M.; Li, F.M. Application of self-adaptive artificial physics optimized particle filter in INS/gravity gradient aided nav-igation. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1070–1075. [Google Scholar]
- Liu, F.; Jing, X. INS/gravity gradient aided navigation based on gravitation field particle filter. Open Phys. 2019, 17, 709–718. [Google Scholar] [CrossRef]
- Gleason, D.M. Passive airborne navigation and terrain avoidance using gravity gradiometry. J. Guid. Control Dyn. 1995, 18, 1450–1458. [Google Scholar] [CrossRef]
- Degregoria, A. Gravity Gradiometry and Map Matching: An Aid to Aircraft Inertial Navigation Systems. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson AFB, OH, USA, 2010. [Google Scholar]
- Zhang, M.; Li, K.; Hu, B.; Meng, C. Comparison of Kalman Filters for Inertial Integrated Navigation. Sensors 2019, 19, 1426. [Google Scholar] [CrossRef]
- Pavlis, N. An Earth Gravitational model to degree 2160: EGM08. In Proceedings of the 2008 General Assembly of the European Geosciences Union, Vienna, Austria, 13–18 April 2008. [Google Scholar]
- Chen, C.; Ouyang, Y.; Bian, S. Spherical Harmonic Expansions for the Gravitational Field of a Polyhedral Body with Poly-nomial Density Contrast. Surv. Geophys. 2019, 40, 197–246. [Google Scholar] [CrossRef]
- Petrovskaya, M.S.; Vershkov, A.N. Construction of spherical harmonic series for the potential derivatives of arbitrary or-ders in the geocentric Earth-fixed reference frame. J. Geod. 2010, 84, 165–178. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Benchmark Parameter | Measurement Update Period | Measurement Noise | Database Noise | Initial Error | Gyro Bias | ||
|---|---|---|---|---|---|---|---|
| Attitude | Velocity | Position | |||||
| Value | 60 s | 0.01 E | 0.001 E | 1 m/s | 10 m | ||
| Mode | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | Latitude | Longitude | Height | |
| Pure inertial calculation | 0.81 | 0.71 | 3.03 | 1.69 | 1.76 | / | 2640 | 2258 | / |
| GGAN | 0.28 | 0.18 | 0.72 | 0.06 | 0.09 | 0.03 | 33 | 29 | 17 |
| Measurement Update Periods (s) | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | 3D | Latitude | Longitude | Height | 3D | |
| 30 | 0.24 | 0.12 | 0.89 | 0.02 | 0.03 | 0.01 | 0.03 | 34 | 18 | 18 | 43 |
| 60 | 0.24 | 0.12 | 0.89 | 0.03 | 0.04 | 0.02 | 0.05 | 40 | 29 | 15 | 52 |
| 90 | 0.35 | 0.18 | 1.61 | 0.04 | 0.05 | 0.03 | 0.07 | 34 | 49 | 15 | 62 |
| 180 | 0.55 | 0.27 | 2.26 | 0.09 | 0.07 | 0.05 | 0.12 | 65 | 127 | 36 | 147 |
| Measurement Noise (E) | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | 3D | Latitude | Longitude | Height | 3D | |
| 0.001 | 0.08 | 0.05 | 0.35 | 0.03 | 0.03 | 0.02 | 0.05 | 22 | 29 | 13 | 40 |
| 0.01 | 0.09 | 0.05 | 0.37 | 0.03 | 0.04 | 0.02 | 0.05 | 25 | 34 | 14 | 45 |
| 0.1 | 0.31 | 0.14 | 1.07 | 0.12 | 0.10 | 0.14 | 0.21 | 126 | 177 | 66 | 227 |
| 1 | 0.55 | 0.30 | 1.34 | 0.89 | 0.48 | 1.61 | 1.90 | 718 | 1087 | 807 | 1533 |
| Database Noise (E) | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | 3D | Latitude | Longitude | Height | 3D | |
| 0.001 | 0.24 | 0.12 | 0.89 | 0.03 | 0.04 | 0.03 | 0.05 | 47 | 26 | 27 | 60 |
| 0.01 | 1.63 | 0.83 | 6.25 | 0.89 | 1.58 | 0.43 | 1.86 | 1379 | 559 | 249 | 1509 |
| Initial Attitude Errors (deg) | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | 3D | Latitude | Longitude | Height | 3D | |
| 0.1 | 0.24 | 0.12 | 0.93 | 0.03 | 0.05 | 0.02 | 0.06 | 39 | 24 | 20 | 51 |
| 0.2 | 0.30 | 0.14 | 1.12 | 0.04 | 0.04 | 0.02 | 0.06 | 44 | 19 | 18 | 51 |
| 0.5 | 0.12 | 0.06 | 0.42 | 0.02 | 0.05 | 0.02 | 0.06 | 32 | 36 | 12 | 51 |
| 1 | 2.38 | 1.17 | 9.29 | 0.31 | 0.39 | 0.18 | 0.6 | 314 | 450 | 178 | 577 |
| Initial Velocity Errors (m/s) | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | 3D | Latitude | Longitude | Height | 3D | |
| 1 | 0.22 | 0.11 | 0.80 | 0.03 | 0.04 | 0.02 | 0.05 | 45 | 22 | 20 | 54 |
| 2 | 0.19 | 0.09 | 0.71 | 0.03 | 0.04 | 0.02 | 0.05 | 35 | 23 | 16 | 45 |
| 3 | 0.23 | 0.11 | 0.83 | 0.03 | 0.05 | 0.02 | 0.06 | 39 | 27 | 19 | 52 |
| 5 | 0.24 | 0.12 | 0.89 | 0.03 | 0.03 | 0.02 | 0.05 | 38 | 24 | 18 | 49 |
| Initial Position Errors (m) | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | 3D | Latitude | Longitude | Height | 3D | |
| 5 | 0.20 | 0.10 | 0.73 | 0.03 | 0.04 | 0.02 | 0.05 | 43 | 23 | 19 | 53 |
| 10 | 0.17 | 0.08 | 0.62 | 0.03 | 0.04 | 0.02 | 0.05 | 33 | 23 | 15 | 44 |
| 100 | 0.54 | 0.27 | 2.08 | 0.06 | 0.07 | 0.04 | 0.10 | 70 | 60 | 44 | 103 |
| 300 | 1.25 | 0.63 | 4.89 | 0.14 | 0.11 | 0.13 | 0.22 | 151 | 150 | 106 | 238 |
| Gyro Bias | Attitude Errors (arcmin) | Velocity Error (m/s) | Position Error (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pitch | Roll | Yaw | East | North | Up | 3D | Latitude | Longitude | Height | 3D | |
| 0.001 | 0.08 | 0.05 | 0.27 | 0.03 | 0.02 | 0.02 | 0.04 | 19 | 15 | 13 | 28 |
| 0.01 | 0.09 | 0.05 | 0.33 | 0.03 | 0.04 | 0.02 | 0.05 | 23 | 20 | 14 | 34 |
| 0.1 | 0.25 | 0.14 | 0.97 | 0.10 | 0.14 | 0.03 | 0.17 | 69 | 54 | 16 | 89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, D.; Hu, B.; Chang, L.; Qin, F.; Lyu, X. An Aided Navigation Method Based on Strapdown Gravity Gradiometer. Sensors 2021, 21, 829. https://doi.org/10.3390/s21030829
Gao D, Hu B, Chang L, Qin F, Lyu X. An Aided Navigation Method Based on Strapdown Gravity Gradiometer. Sensors. 2021; 21(3):829. https://doi.org/10.3390/s21030829
Chicago/Turabian StyleGao, Duanyang, Baiqing Hu, Lubin Chang, Fangjun Qin, and Xu Lyu. 2021. "An Aided Navigation Method Based on Strapdown Gravity Gradiometer" Sensors 21, no. 3: 829. https://doi.org/10.3390/s21030829
APA StyleGao, D., Hu, B., Chang, L., Qin, F., & Lyu, X. (2021). An Aided Navigation Method Based on Strapdown Gravity Gradiometer. Sensors, 21(3), 829. https://doi.org/10.3390/s21030829