
In Search of a Soil Moisture Content Simulation Model: Mechanistic and Data Mining Approach Based on TDR Method Results


 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurements of Meteorological Parameters
2.2. Measurements of Soil Moisture Content
2.3. Data Mining Methods for Soil Moisture Content Simulation
2.4. Deardorff Equation
2.5. Coupled GSA-GLUE Methodology
2.6. Aspects of Soil Moisture Content Estimation
3. Results and Discussion
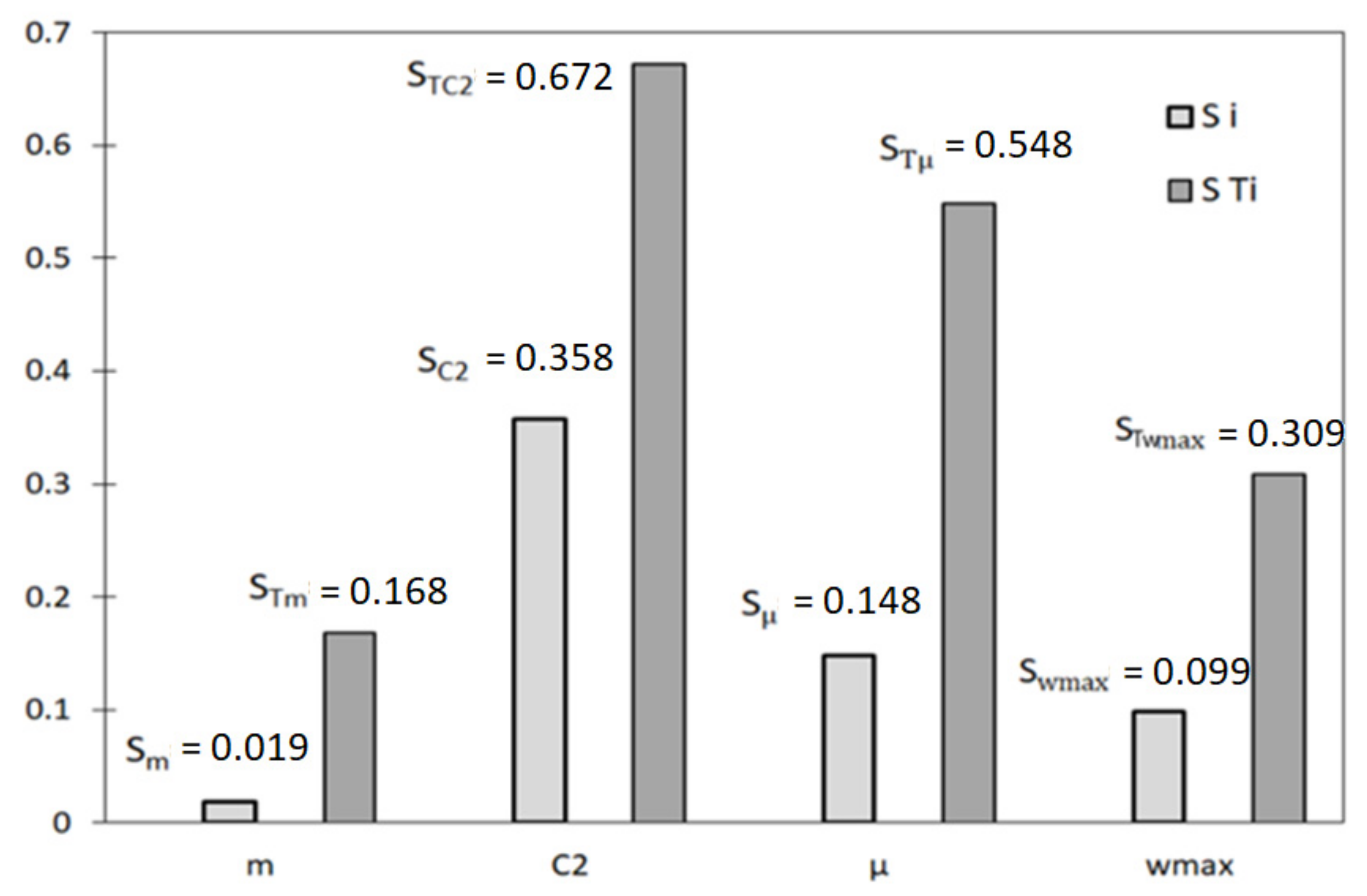
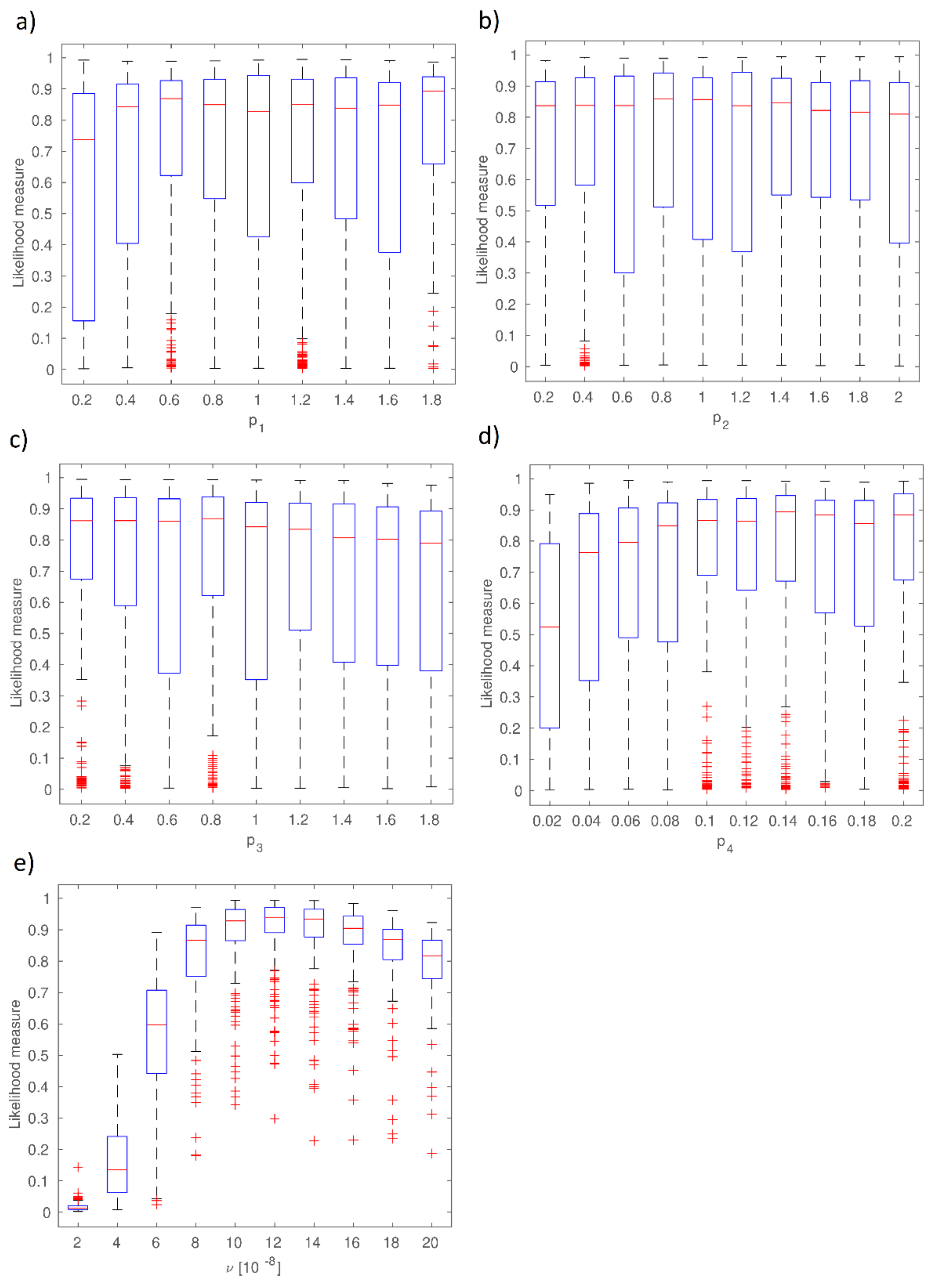
3.1. Coupled GLUE-GSA Method
3.2. Statistical Models for Soil Moisture Content Forecast
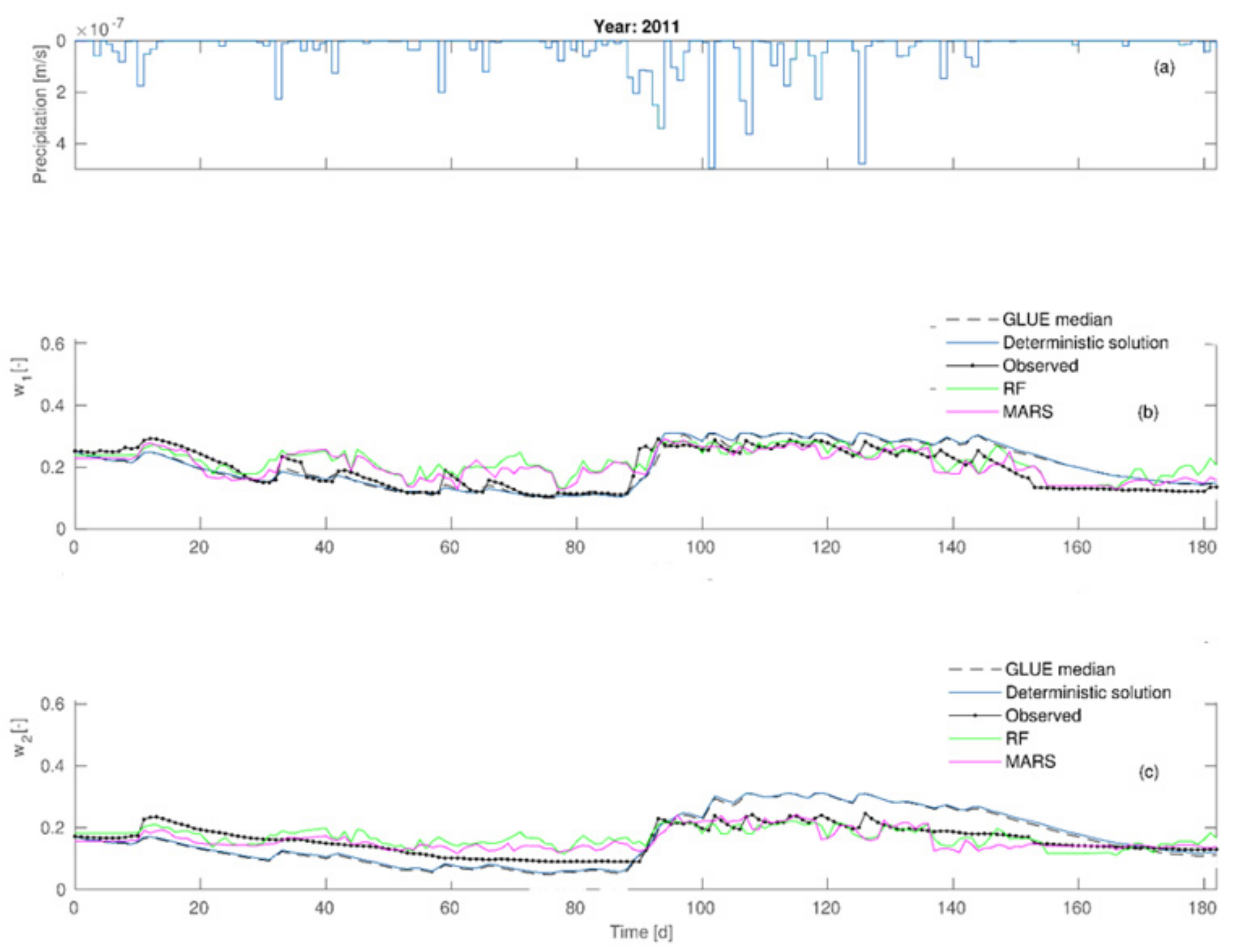
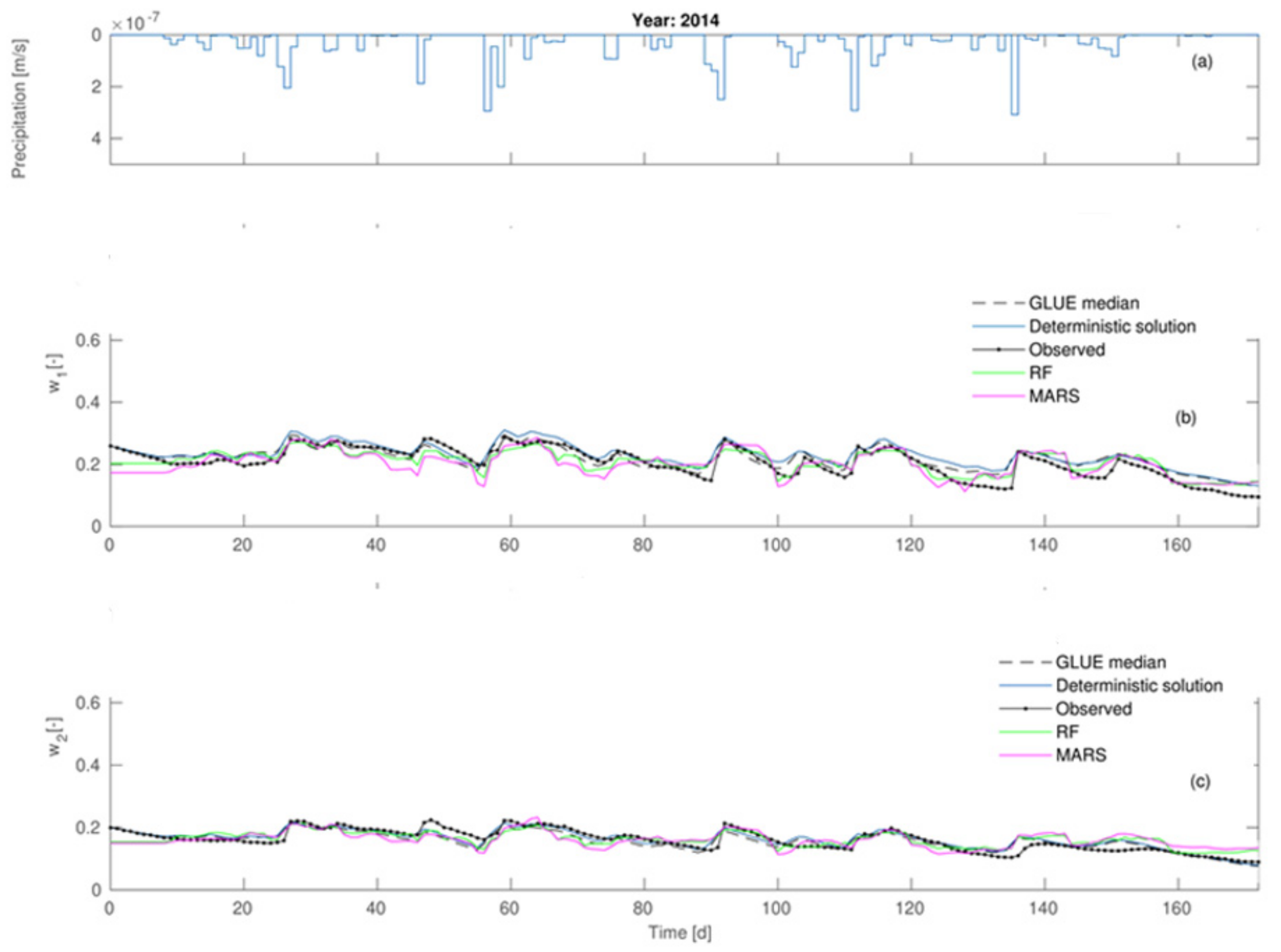
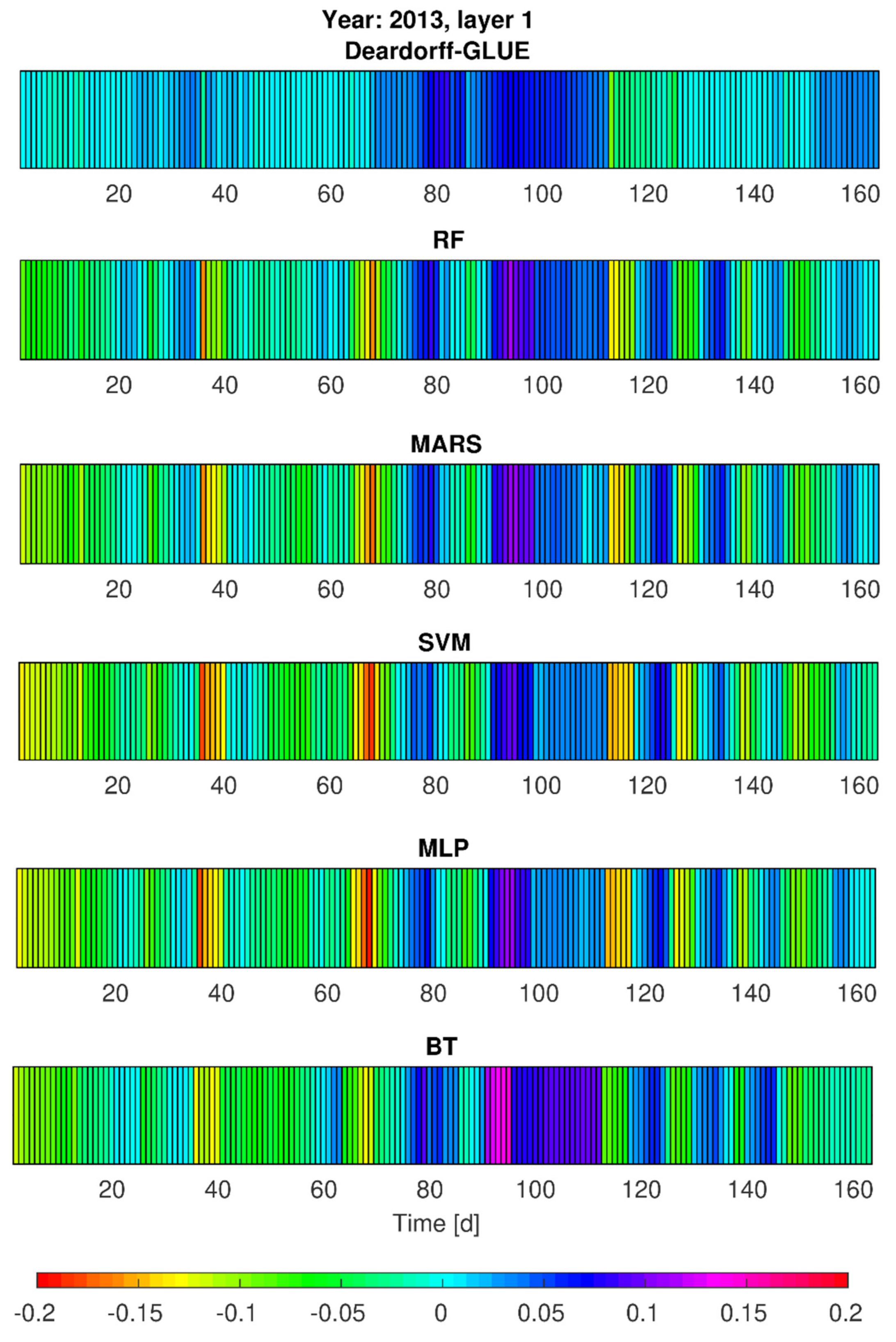
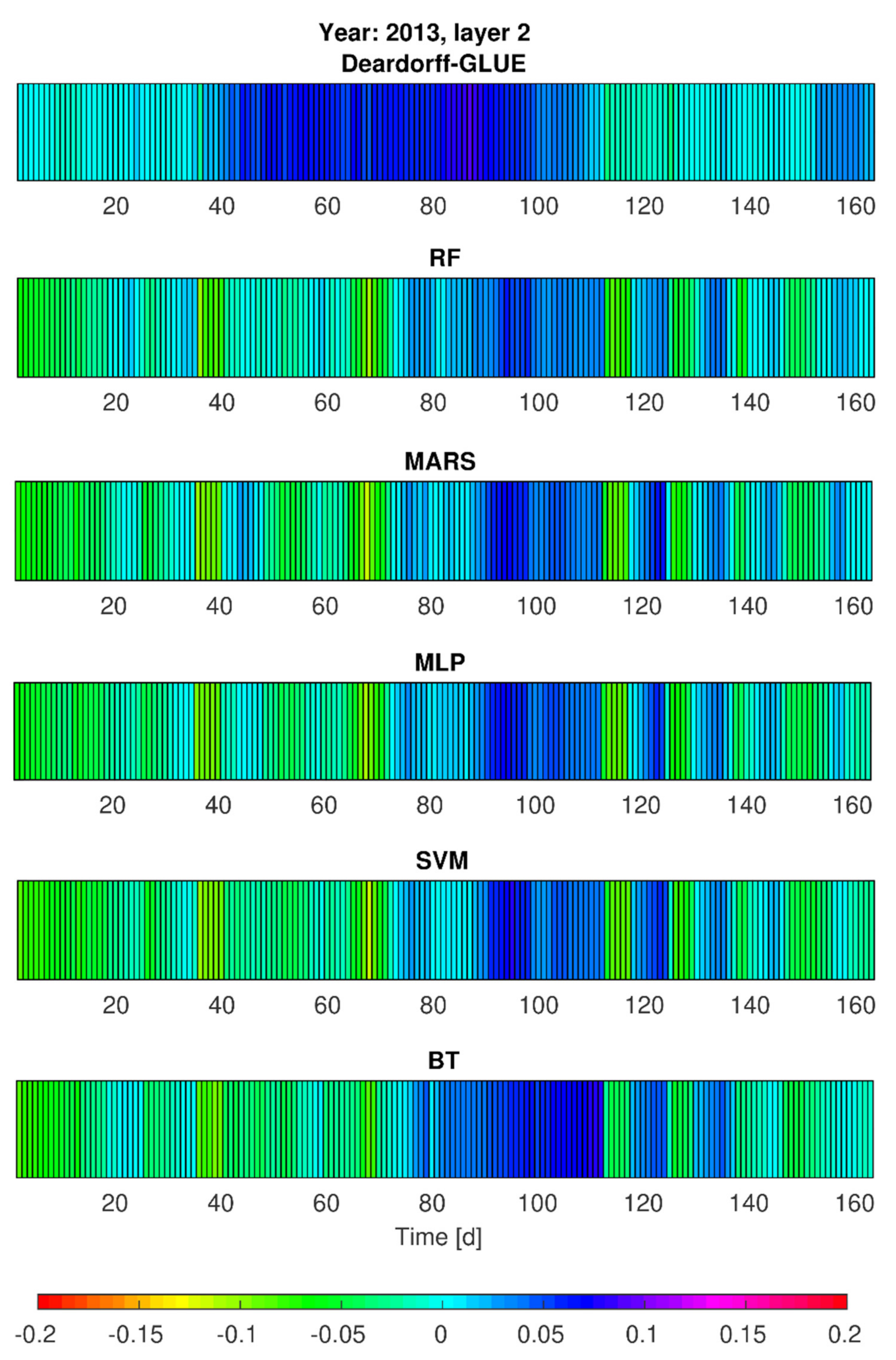
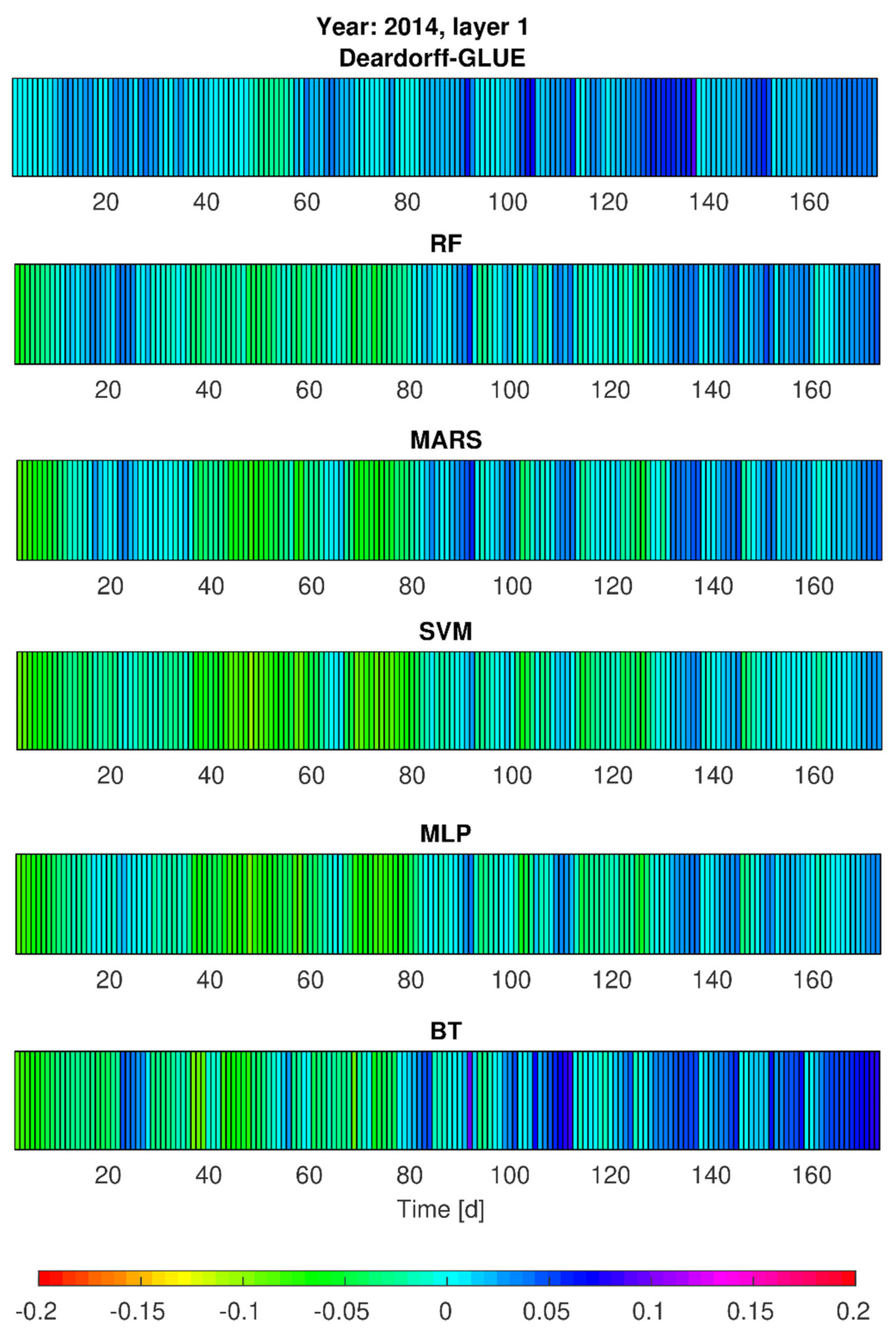
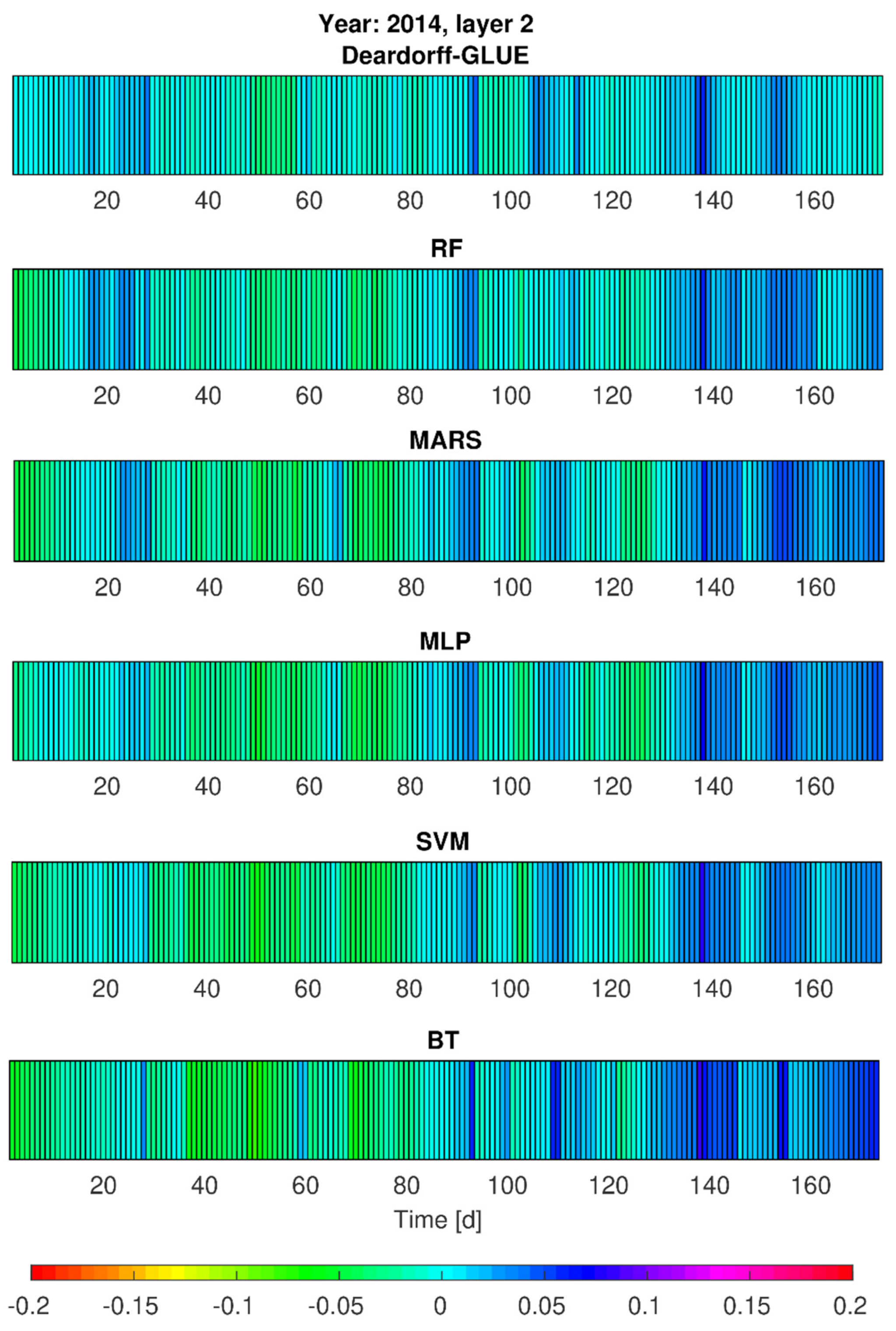
3.3. Simulations of Soil Moisture Content by Deardorff and Statistical Models—Heat Maps
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Albergel, C.; de Rosnay, P.; Gruhier, C.; Muñoz-Sabater, J.; Hasenauer, S.; Isaksen, L.; Kerr, Y.; Wagner, W. Evaluation of remotely sensed and modelled soil moisture products using global ground-based in situ observations. Remote Sens. Environ. 2012, 118, 215–226. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgend, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Ainiwaer, M.; Ding, J.; Kasim, N.; Wang, J.; Wang, J. Regional scale soil moisture content estimation based on multi-source remote sensing parameters. Int. J. Remote Sens. 2020, 41, 3346–3367. [Google Scholar] [CrossRef]
- Whan, K.; Zscheischler, J.; Orth, R.; Shongwe, M.; Rahimi, M.; Asare, E.O.; Seneviratne, S. Impact of soil moisture on extreme maximum temperatures in Europe. Weather Clim. Extrem. 2015, 9, 57–67. [Google Scholar] [CrossRef] [Green Version]
- Seneviratne, S.I.; Corti, T.; Davin, E.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A. Investigating soil moisture–climate interactions in a changing climate: A review. Earth Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Deardorff, J.W. A parameterization of ground-surface moisture content for use in atmospheric prediction models. J. Appl. Meteorol. 1977, 16, 1182–1185. [Google Scholar] [CrossRef]
- Ban-Weiss, G.; Bala, G.; Cao, L.; Pongratz, J.; Caldeira, K. Climate forcing and response to idealized changes in surface latent and sensible heat. Environ. Res. Lett. 2011, 6, 034032. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Horton, R.; Noborio, K.; Jaynes, D.B. Characterization of preferential flow in undisturbed, structured soil columns using a vertical TDR probe. J. Contam. Hydrol. 2001, 51, 131–144. [Google Scholar] [CrossRef] [Green Version]
- Yanful, E.K.; Mousavi, S.M.; Yang, M. Modeling and measurement of evaporation in moisture-retaining soil covers. Adv. Environ. Res. 2002, 7, 783–801. [Google Scholar] [CrossRef]
- Udawatta, R.P.; Anderson, S.H.; Motavalli, P.P.; Garrett, H.E. Calibration of a water content reflectometer and soil water dynamics for an agroforestry practice. Agrofor. Syst. 2010, 82, 61–75. [Google Scholar] [CrossRef]
- Skierucha, W.; Wilczek, A.; Szypłowska, A.; Sławiński, C.; Lamorski, K. A TDR-Based Soil Moisture Monitoring System with Simultaneous Measurement of Soil Temperature and Electrical Conductivity. Sensors 2012, 12, 13545–13566. [Google Scholar] [CrossRef]
- Wilczek, A.; Szypłowska, A.; Nosalewicz, A.; Skierucha, W.; Wilczek, W. Project of an automatic system for soil moisture regulation using TDR technique. In Proceedings of the VI International Scientific Symposium Farm Machinery and Processes Management in Sustainable Agriculture, Lublin, Poland, 20–22 November 2013; pp. 197–200. [Google Scholar]
- Suchorab, Z.; Jedut, A.; Sobczuk, H. Water content measurement in building barriers and materials using surface TDR probe. In Proceedings of the 16th Central European Conference, Jamrozowa, Polana, 18–20 November 2007. [Google Scholar]
- Suchorab, Z.; Widomski, M.K.; Łagód, G.; Barnat-Hunek, D.; Majerek, D. A Noninvasive TDR Sensor to Measure the Moisture Content of Rigid Porous Materials. Sensors 2018, 18, 3935. [Google Scholar] [CrossRef] [Green Version]
- Suchorab, Z.; Majerek, D.; Kočí, V.; Černý, R. Time Domain Reflectometry flat sensor for non-invasive monitoring of moisture changes in building materials. Measurement 2020, 165, 108091. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef] [Green Version]
- Alley, R.B.; Emanuel, K.A.; Zhang, F. Advances in weather prediction. Science 2019, 363, 342–344. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, W.; Zhang, Y.; Goh, A. Multivariate adaptive regression splines for inverse analysis of soil and wall properties in braced excavation. Tunn. Undergr. Space Technol. 2017, 64, 24–33. [Google Scholar] [CrossRef]
- Jeihouni, M.; Alavipanah, S.; Toomanian, A.; Jafarzadeh, A. Digital mapping of soil moisture retention properties using solely sattelite-based data and data mining techniques. J. Hydrol. 2020, 585, 124786. [Google Scholar] [CrossRef]
- Fernández, J.R.A.; Nieto, P.J.G.; Muñiz, C.D.; Antón, J.C. Álvarez Modeling eutrophication and risk prevention in a reservoir in the Northwest of Spain by using multivariate adaptive regression splines analysis. Ecol. Eng. 2014, 68, 80–89. [Google Scholar] [CrossRef]
- Mathias, S.; Skaggs, T.; Quinn, S.; Egan, S.; Finch, L.; Oldham, C. A soil moisture accounting procedure with a Richards’ equation-based soil texture-dependent parametrization. Water Resour. Res. 2015, 51, 506–523. [Google Scholar] [CrossRef] [Green Version]
- Brandyk, A.; Kiczko, A.; Majewski, G.; Kleniewska, M.; Krukowski, M. Uncertainty of Deardorff’s soil moisture model based on continuous TDR measurements for sandy loam soil. J. Hydrol. Hydromech. 2016, 64, 23–29. [Google Scholar] [CrossRef] [Green Version]
- Lamorski, K.; Pastuszka, T.; Krzyszczak, J.; Sławiński, C.; Witkowska-Walczak, B. Soil Water Dynamic Modeling Using the Physical and Support Vector Machine Methods. Vadose Zone J. 2013, 12, 1–12. [Google Scholar] [CrossRef]
- Samaneh, E.; Vahidreza, J.; Majid, M.; Khashei, A.; Bilondi, M.; Pourreza, M. Assessing an efficient hybrid of Monte Carlo technique (GSA-GLUE) in Uncertainty and Sensitivity Analysis of van Genuchten. Comput. Geosci. 2021, 25, 503–514. [Google Scholar]
- Ratto, M.; Tarantola, S.; Saltelli, A. Sensitivity analysis in model calibration: GSA-GLUE approach. Comput. Phys. Commun. 2001, 136, 212–224. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration-Guidelines for Computing Crop Water Requirements-FAO Irrigation and Drainage Paper 56; FAO: Rome, Italy, 1998. [Google Scholar]
- Matusiewicz, W. Foundation walls drying and dewatering of soil adjacent to the Ursyn Niemcewicz Palace. Sci. Rev. Eng. Env. Sci. 2013, 60, 208–221. [Google Scholar]
- Szejba, D.; Gnatowski, T.; Oleszczuk, R. Soil Physical and Hydraulic Properties Estimation for the Drainage of WULS Sport Facilities; WULS Expertise: Warsaw, Poland, 2003; p. 15. (In Polish) [Google Scholar]
- Ryzak, M.; Bieganowski, A.; Bartminski, P. Methods for determination of particle size distribution of mineral soils. Acta Agrophys. 2009, 175, 60–72. [Google Scholar]
- Malicki, M.; Skierucha, W. A manually controlled TDR soil moisture meter operating with 300 ps rise-time needle pulse. Irrig. Sci. 1989, 10, 153. [Google Scholar] [CrossRef]
- Malicki, M.; Plagge, R.; Roth, C. Improving the calibration of dielectric TDR soil moisture determination taking into account the solid soil. Eur. J. Soil Sci. 1996, 47, 357–366. [Google Scholar] [CrossRef]
- Carranza, C.; Nolet, C.; Pezij, M.; van der Ploeg, M. Root zone soil moisture estimation with Random Forest. J. Hydrol. 2021, 593, 125840. [Google Scholar] [CrossRef]
- Achieng, K.O. Modelling of soil moisture retention curve using machine learning techniques: Artificial and deep neural networks vs support vector regression models. Comput. Geosci. 2019, 133, 104320. [Google Scholar] [CrossRef]
- Brunetti, G.; Šimůnek, J.; Piro, P. A comprehensive numerical analysis of the hydraulic behavior of a permeable pavement. J. Hydrol. 2016, 540, 1146–1161. [Google Scholar] [CrossRef] [Green Version]
- Noilhan, J.; Planton, S. A simple parameterization of land surface processes for meteorological models. Mon. Weather Rev. 1989, 117, 536–549. [Google Scholar] [CrossRef]
- Huang, J.; Dool, H.M.V.D.; Georgarakos, K.P. Analysis of Model-Calculated Soil Moisture over the United States (1931–1993) and Applications to Long-Range Temperature Forecasts. J. Clim. 1996, 9, 1350–1362. [Google Scholar] [CrossRef] [Green Version]
- Shampine, L.F.; Reichelt, M.W. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Liu, J.; Zhang, J.; Li, X.; Zhao, Y. Quantifying soil hydraulic properties and their uncertainties by modified GLUE method. Int. Agrophys. 2017, 31, 433–445. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Parameter | Range | Error |
|---|---|---|---|
| Thermohygrometer Vaisala: QMH102 at the height of 2 m. | temperature | −40; +60 °C | <±0.3 °C |
| relative humidity | 0 to 90% RH | ±2% | |
| relative humidity | 90 to 100% RH | ±3% | |
| Sonic sensor Vaisala: WS425–B2A1B at the height of 4 m. | wind speed | 0–56 m/s | ±0.135 m/s or ±3% of the range |
| wind direction | 0–360° | ±2° for wind speed > 2 m/s |
| Variables | Unit | Min | Max |
|---|---|---|---|
| m | - | 0 | 2 |
| C2 | - | 0 | 2 |
| μ | - | 0 | 10−7 |
| wmax | - | 0.24 | 0.42 |
| Parameter | First Layer | Second Layer | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Learning | Testing | Learning | Testing | |||||||||
| R | MAE | MAPE | R | MAE | MAPE | R | MAE | MAPE | R | MAE | MAPE | |
| MARS | ||||||||||||
| P (t = 1) | 0.60 | 4.00 | 20.58 | 0.43 | 5.10 | 31.20 | 0.58 | 2.79 | 18.14 | 0.50 | 3.21 | 22.77 |
| P (t = 2) | 0.58 | 3.82 | 19.95 | 0.51 | 4.37 | 29.04 | 0.62 | 2.73 | 17.95 | 0.52 | 3.08 | 22.05 |
| P (t = 3) | 0.60 | 3.66 | 19.37 | 0.51 | 4.34 | 26.66 | 0.60 | 2.64 | 17.58 | 0.55 | 2.95 | 21.15 |
| P (t = 4) | 0.46 | 3.52 | 18.87 | 0.57 | 3.92 | 24.16 | 0.59 | 2.64 | 17.78 | 0.58 | 2.78 | 20.09 |
| P (t = 5) | 0.63 | 3.38 | 18.05 | 0.61 | 3.67 | 22.63 | 0.60 | 2.62 | 17.59 | 0.62 | 2.63 | 19.10 |
| P (t = 6) | 0.66 | 3.30 | 17.49 | 0.65 | 3.41 | 21.13 | 0.62 | 2.55 | 17.07 | 0.65 | 2.50 | 18.24 |
| P (t = 7) | 0.67 | 3.20 | 16.90 | 0.66 | 3.31 | 20.41 | 0.66 | 2.48 | 16.63 | 0.67 | 2.39 | 17.50 |
| P (me) | 0.68 | 3.19 | 16.90 | 0.65 | 3.36 | 20.57 | 0.66 | 2.48 | 16.63 | 0.68 | 2.38 | 17.45 |
| T (t−1) | 0.60 | 3.89 | 20.04 | 0.39 | 5.45 | 33.19 | 0.61 | 2.69 | 17.55 | 0.48 | 3.31 | 23.27 |
| Wilg (t−1) | 0.60 | 4.03 | 20.64 | 0.38 | 5.58 | 34.14 | 0.62 | 2.73 | 17.68 | 0.47 | 3.35 | 23.55 |
| P (me), Tsr | 0.81 | 2.48 | 12.05 | 0.81 | 2.50 | 15.90 | 0.79 | 1.93 | 12.43 | 0.74 | 2.15 | 15.53 |
| P (me), Wilgsr | 0.77 | 3.15 | 15.58 | 0.83 | 2.44 | 16.05 | 0.68 | 2.33 | 15.04 | 0.82 | 1.89 | 14.68 |
| P (me), Wilgsr, Tsr | 0.85 | 2.45 | 12.03 | 0.92 | 2.07 | 12.22 | 0.82 | 1.96 | 12.62 | 0.94 | 1.55 | 11.28 |
| MLP | ||||||||||||
| P (t = 1) | 0.41 | 4.94 | 28.71 | 0.55 | 4.30 | 24.98 | 0.39 | 3.02 | 20.69 | 0.34 | 3.51 | 27.94 |
| P (t = 2) | 0.53 | 4.57 | 26.63 | 0.52 | 4.37 | 24.59 | 0.42 | 3.16 | 22.94 | 0.52 | 3.13 | 22.23 |
| P (t = 3) | 0.60 | 3.94 | 23.18 | 0.61 | 3.95 | 22.90 | 0.50 | 2.99 | 22.14 | 0.58 | 2.86 | 20.44 |
| P (t = 4) | 0.67 | 3.46 | 20.03 | 0.71 | 3.64 | 20.08 | 0.58 | 2.39 | 16.71 | 0.59 | 2.86 | 21.16 |
| P (t = 5) | 0.69 | 3.46 | 19.83 | 0.71 | 3.20 | 17.93 | 0.61 | 2.63 | 17.72 | 0.65 | 2.81 | 22.20 |
| P (t = 6) | 0.76 | 2.84 | 16.76 | 0.72 | 3.00 | 17.00 | 0.66 | 2.16 | 15.53 | 0.63 | 2.79 | 20.53 |
| P (t = 7) | 0.69 | 3.20 | 19.03 | 0.77 | 2.92 | 16.50 | 0.62 | 2.66 | 20.34 | 0.71 | 2.19 | 14.11 |
| P (me) | 0.75 | 2.99 | 17.33 | 0.76 | 2.85 | 16.39 | 0.68 | 2.40 | 18.02 | 0.69 | 2.37 | 18.10 |
| T (t−1) | 0.14 | 5.38 | 31.86 | 0.18 | 5.38 | 28.98 | 0.17 | 3.33 | 23.06 | 0.20 | 3.40 | 24.29 |
| Wilg (t−1) | 0.21 | 5.20 | 30.09 | 0.29 | 5.59 | 33.47 | 0.28 | 3.38 | 23.26 | 0.17 | 4.17 | 30.34 |
| P (me), Tsr | 0.81 | 2.54 | 16.90 | 0.80 | 2.71 | 15.50 | 0.65 | 2.56 | 18.47 | 0.73 | 2.37 | 17.24 |
| P (me), Wilgsr | 0.76 | 2.89 | 17.17 | 0.83 | 2.33 | 13.18 | 0.65 | 2.24 | 16.33 | 0.65 | 2.31 | 18.07 |
| P (me), Wilgsr, Tsr | 0.82 | 2.50 | 16.18 | 0.84 | 2.15 | 15.50 | 0.67 | 2.18 | 15.72 | 0.68 | 2.20 | 16.00 |
| SVM | ||||||||||||
| P (t = 1) | 0.43 | 4.57 | 23.43 | 0.31 | 4.75 | 26.12 | 0.33 | 3.11 | 21.38 | 0.13 | 3.08 | 21.53 |
| P (t = 2) | 0.51 | 4.22 | 21.62 | 0.54 | 4.01 | 22.08 | 0.39 | 2.99 | 20.87 | 0.39 | 2.77 | 19.65 |
| P (t = 3) | 0.56 | 3.89 | 20.18 | 0.68 | 3.45 | 19.52 | 0.45 | 2.87 | 20.50 | 0.52 | 2.57 | 18.63 |
| P (t = 4) | 0.62 | 3.62 | 19.34 | 0.76 | 2.92 | 17.24 | 0.49 | 2.78 | 20.29 | 0.61 | 2.37 | 17.83 |
| P (t = 5) | 0.67 | 3.32 | 18.01 | 0.74 | 3.05 | 18.02 | 0.56 | 2.62 | 19.34 | 0.56 | 2.42 | 18.21 |
| P (t = 6) | 0.71 | 3.13 | 17.15 | 0.73 | 2.96 | 17.63 | 0.61 | 2.51 | 18.55 | 0.59 | 2.32 | 17.81 |
| P (t = 7) | 0.73 | 2.98 | 16.35 | 0.72 | 2.99 | 17.53 | 0.65 | 2.41 | 17.68 | 0.61 | 2.29 | 17.16 |
| P (me) | 0.74 | 2.92 | 16.35 | 0.73 | 2.95 | 17.05 | 0.68 | 2.32 | 17.15 | 0.62 | 2.26 | 16.56 |
| T (t−1) | 0.20 | 5.14 | 28.43 | 0.18 | 5.74 | 33.92 | 0.19 | 3.26 | 23.50 | 0.13 | 3.28 | 24.62 |
| Wilg (t−1) | 0.19 | 5.30 | 30.56 | 0.18 | 5.38 | 33.14 | 0.07 | 3.42 | 22.46 | 0.02 | 3.09 | 21.60 |
| P (me), Tsr | 0.78 | 2.86 | 15.15 | 0.79 | 2.56 | 14.26 | 0.67 | 2.34 | 17.61 | 0.62 | 2.33 | 16.70 |
| P (me), Wilgsr | 0.76 | 2.86 | 15.79 | 0.76 | 2.86 | 16.11 | 0.72 | 2.21 | 16.47 | 0.67 | 2.11 | 15.31 |
| P (me), Wilgsr, Tsr | 0.83 | 2.42 | 13.74 | 0.84 | 2.39 | 13.47 | 0.67 | 2.35 | 17.46 | 0.64 | 2.16 | 15.85 |
| Parameter | First Layer | Second Layer | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Learning | Testing | Learning | Testing | |||||||||
| R | MAE | MAPE | R | MAE | MAPE | R | MAE | MAPE | R | MAE | MAPE | |
| BT | ||||||||||||
| P (t = 1) | 0.49 | 4.63 | 27.64 | 0.33 | 5.13 | 27.93 | 0.47 | 2.99 | 21.66 | 0.27 | 3.63 | 23.33 |
| P (t = 2) | 0.59 | 4.09 | 24.43 | 0.52 | 4.43 | 24.15 | 0.55 | 2.83 | 20.54 | 0.48 | 3.32 | 21.50 |
| P (t = 3) | 0.62 | 3.92 | 22.85 | 0.55 | 3.93 | 21.91 | 0.56 | 2.71 | 19.17 | 0.50 | 2.83 | 18.62 |
| P (t = 4) | 0.69 | 3.39 | 19.49 | 0.65 | 3.44 | 18.71 | 0.63 | 2.51 | 18.06 | 0.62 | 2.48 | 16.44 |
| P (t = 5) | 0.74 | 3.08 | 17.58 | 0.71 | 3.00 | 16.31 | 0.64 | 2.48 | 17.85 | 0.61 | 2.56 | 17.17 |
| P (t = 6) | 0.74 | 3.10 | 17.83 | 0.78 | 2.71 | 15.34 | 0.66 | 2.40 | 17.05 | 0.72 | 2.25 | 15.26 |
| P (t = 7) | 0.78 | 2.82 | 16.21 | 0.79 | 2.66 | 15.11 | 0.67 | 2.30 | 16.34 | 0.75 | 2.14 | 14.56 |
| P (me) | 0.78 | 2.85 | 16.40 | 0.80 | 2.67 | 14.50 | 0.69 | 2.24 | 15.82 | 0.78 | 2.01 | 13.94 |
| T (t−1) | 0.22 | 5.29 | 30.70 | 0.26 | 5.09 | 28.43 | 0.42 | 3.05 | 21.19 | 0.31 | 3.02 | 19.87 |
| Wilg (t−1) | 0.25 | 5.31 | 30.10 | 0.12 | 5.32 | 29.43 | 0.29 | 3.31 | 22.39 | 0.10 | 3.48 | 22.29 |
| P (me), Tsr | 0.81 | 2.66 | 15.51 | 0.80 | 2.80 | 15.68 | 0.71 | 2.20 | 15.66 | 0.72 | 2.33 | 15.61 |
| P (me), Wilgsr | 0.79 | 2.79 | 16.07 | 0.80 | 2.81 | 15.42 | 0.71 | 2.23 | 15.99 | 0.70 | 2.25 | 14.78 |
| P (me), Wilgsr, Tsr | 0.81 | 2.68 | 15.36 | 0.81 | 2.72 | 14.71 | 0.73 | 2.15 | 15.09 | 0.69 | 2.20 | 14.00 |
| RF | ||||||||||||
| P (t = 1) | 0.50 | 4.66 | 27.72 | 0.35 | 4.89 | 27.13 | 0.40 | 3.16 | 22.38 | 0.12 | 3.62 | 24.96 |
| P (t = 2) | 0.61 | 4.11 | 24.25 | 0.41 | 4.72 | 26.23 | 0.57 | 2.77 | 19.43 | 0.12 | 3.77 | 26.27 |
| P (t = 3) | 0.63 | 3.76 | 21.95 | 0.59 | 3.97 | 22.70 | 0.58 | 2.58 | 18.45 | 0.38 | 3.02 | 21.12 |
| P (t = 4) | 0.69 | 3.37 | 19.94 | 0.70 | 3.39 | 19.60 | 0.62 | 2.47 | 17.79 | 0.57 | 2.61 | 18.43 |
| P (t = 5) | 0.75 | 2.92 | 17.38 | 0.72 | 3.17 | 18.15 | 0.67 | 2.28 | 16.66 | 0.63 | 2.53 | 17.95 |
| P (t = 6) | 0.77 | 2.83 | 17.05 | 0.75 | 2.98 | 16.68 | 0.71 | 2.15 | 15.94 | 0.59 | 2.65 | 18.51 |
| P (t = 7) | 0.81 | 2.54 | 15.28 | 0.77 | 2.86 | 16.34 | 0.74 | 1.98 | 14.61 | 0.60 | 2.64 | 18.23 |
| P (me) | 0.83 | 2.34 | 14.03 | 0.78 | 2.79 | 14.94 | 0.74 | 2.04 | 14.59 | 0.61 | 2.48 | 17.07 |
| T (t−1) | 0.37 | 4.83 | 28.59 | 0.06 | 5.38 | 30.42 | 0.36 | 3.03 | 21.31 | 0.20 | 3.38 | 23.06 |
| Wilg (t−1) | 0.32 | 5.13 | 29.99 | 0.18 | 5.49 | 30.50 | 0.32 | 3.27 | 22.44 | 0.06 | 3.55 | 24.20 |
| P (me), Tsr | 0.87 | 2.72 | 16.34 | 0.75 | 3.30 | 18.66 | 0.82 | 2.06 | 14.78 | 0.59 | 2.67 | 19.14 |
| P (me), Wilgsr | 0.85 | 2.96 | 17.66 | 0.80 | 3.30 | 18.89 | 0.80 | 2.05 | 14.92 | 0.58 | 2.70 | 19.50 |
| P (me), Wilgsr, Tsr | 0.86 | 2.93 | 17.40 | 0.83 | 2.96 | 17.80 | 0.78 | 2.01 | 14.50 | 0.68 | 2.20 | 15.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brandyk, A.; Szeląg, B.; Kiczko, A.; Krukowski, M.; Kozioł, A.; Piotrowski, J.; Majewski, G. In Search of a Soil Moisture Content Simulation Model: Mechanistic and Data Mining Approach Based on TDR Method Results. Sensors 2021, 21, 6819. https://doi.org/10.3390/s21206819
Brandyk A, Szeląg B, Kiczko A, Krukowski M, Kozioł A, Piotrowski J, Majewski G. In Search of a Soil Moisture Content Simulation Model: Mechanistic and Data Mining Approach Based on TDR Method Results. Sensors. 2021; 21(20):6819. https://doi.org/10.3390/s21206819
Chicago/Turabian StyleBrandyk, Andrzej, Bartosz Szeląg, Adam Kiczko, Marcin Krukowski, Adam Kozioł, Jerzy Piotrowski, and Grzegorz Majewski. 2021. "In Search of a Soil Moisture Content Simulation Model: Mechanistic and Data Mining Approach Based on TDR Method Results" Sensors 21, no. 20: 6819. https://doi.org/10.3390/s21206819
APA StyleBrandyk, A., Szeląg, B., Kiczko, A., Krukowski, M., Kozioł, A., Piotrowski, J., & Majewski, G. (2021). In Search of a Soil Moisture Content Simulation Model: Mechanistic and Data Mining Approach Based on TDR Method Results. Sensors, 21(20), 6819. https://doi.org/10.3390/s21206819