
Raptor: A Design of a Drain Inspection Robot

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Robot Design
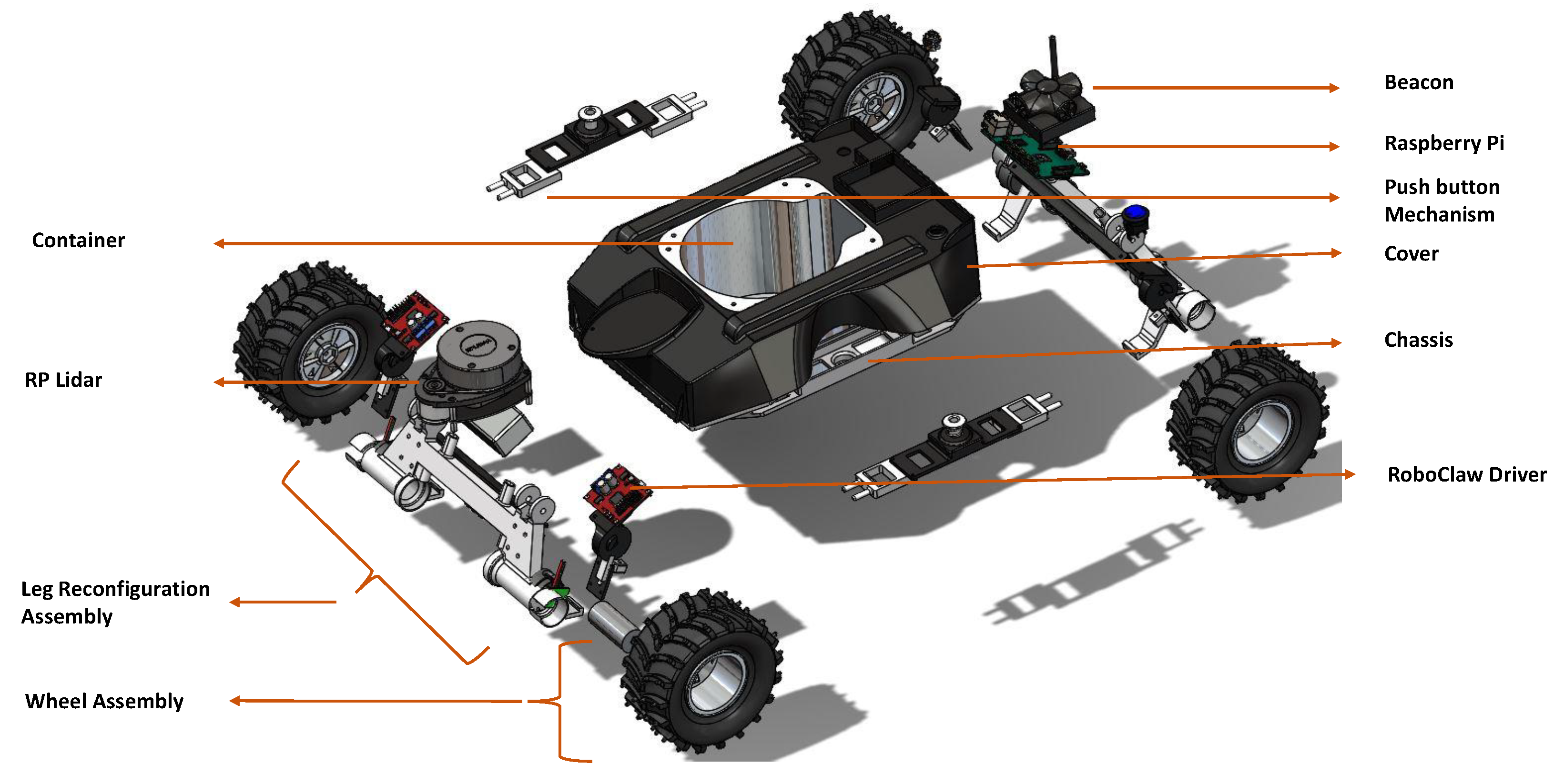
2.1. Mechanical Design
2.1.1. Design Principle
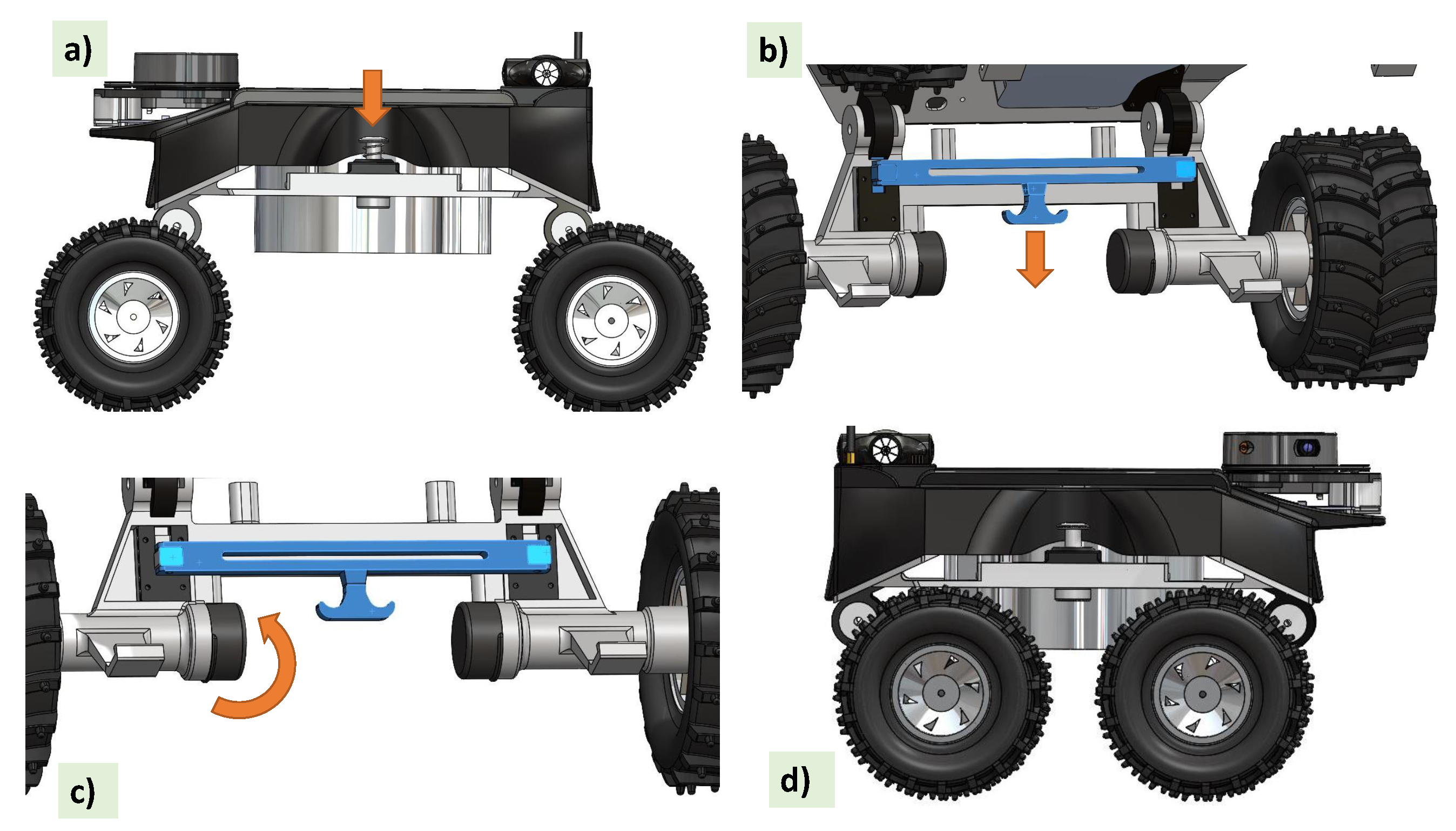
2.1.2. Reconfiguration Module
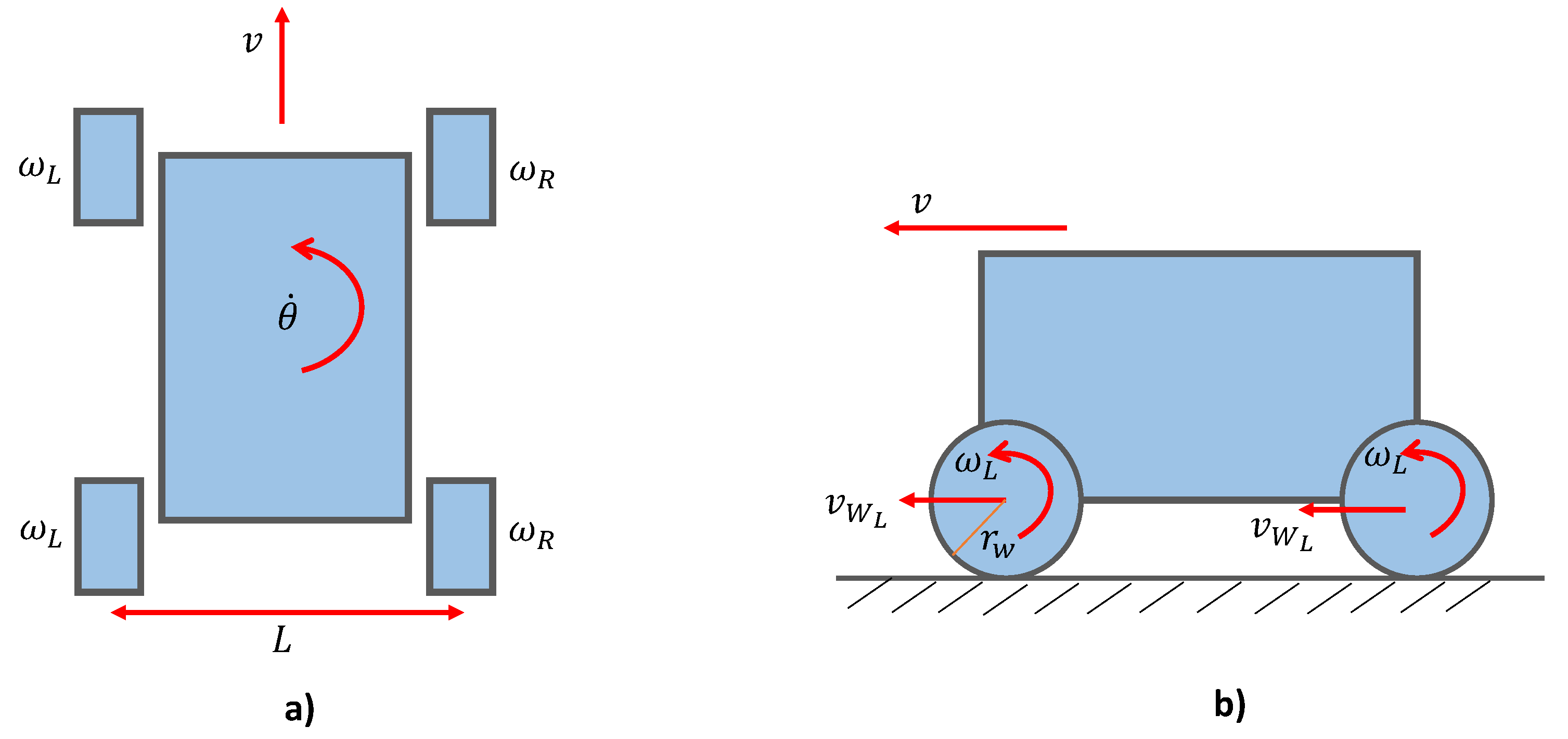
2.1.3. Kinematics
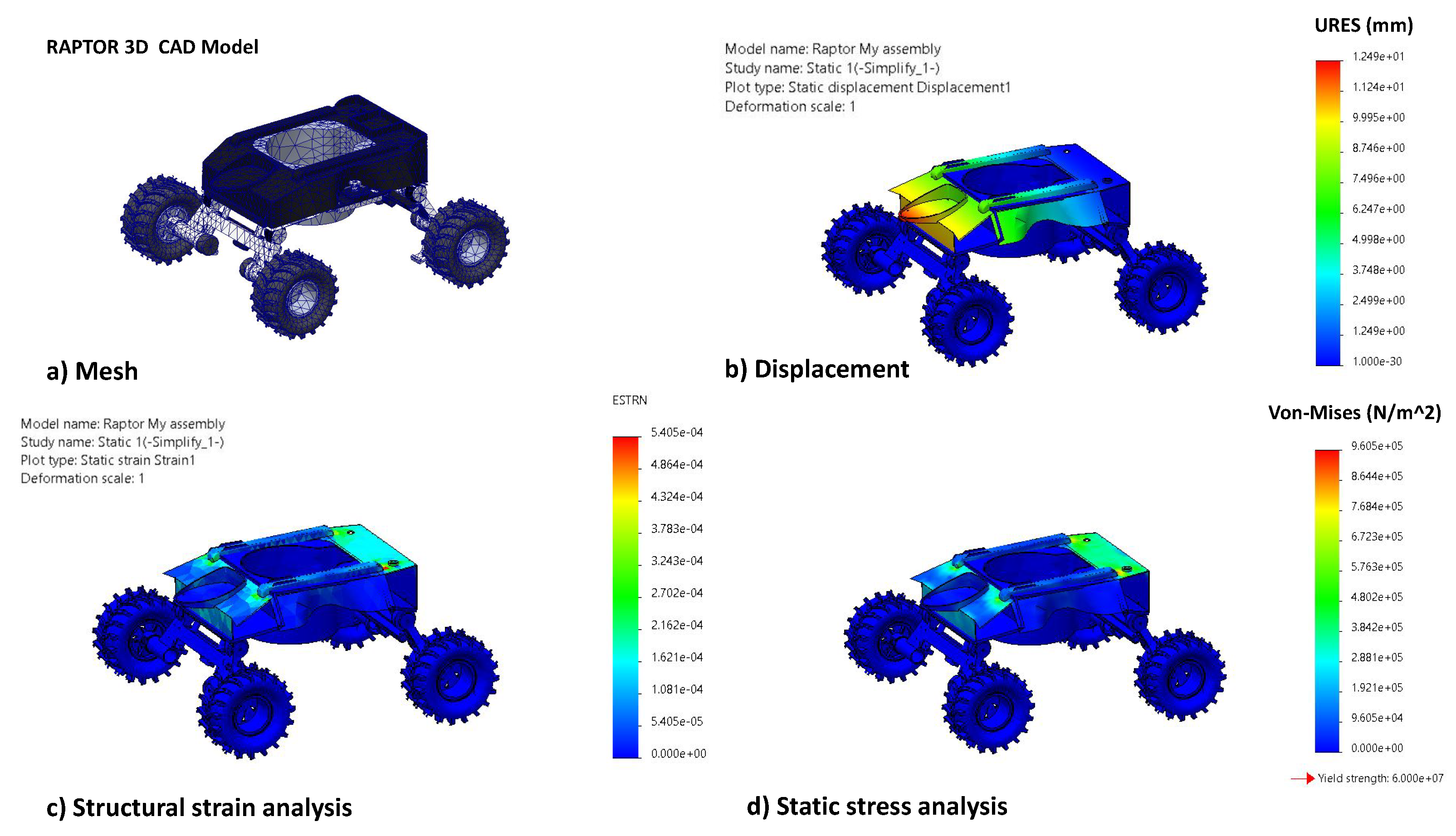
2.1.4. Structural Analysis
2.2. Control Architecture
2.2.1. Electronics and Control
2.2.2. Autonomy Layer and Graphical User Interface (GUI)
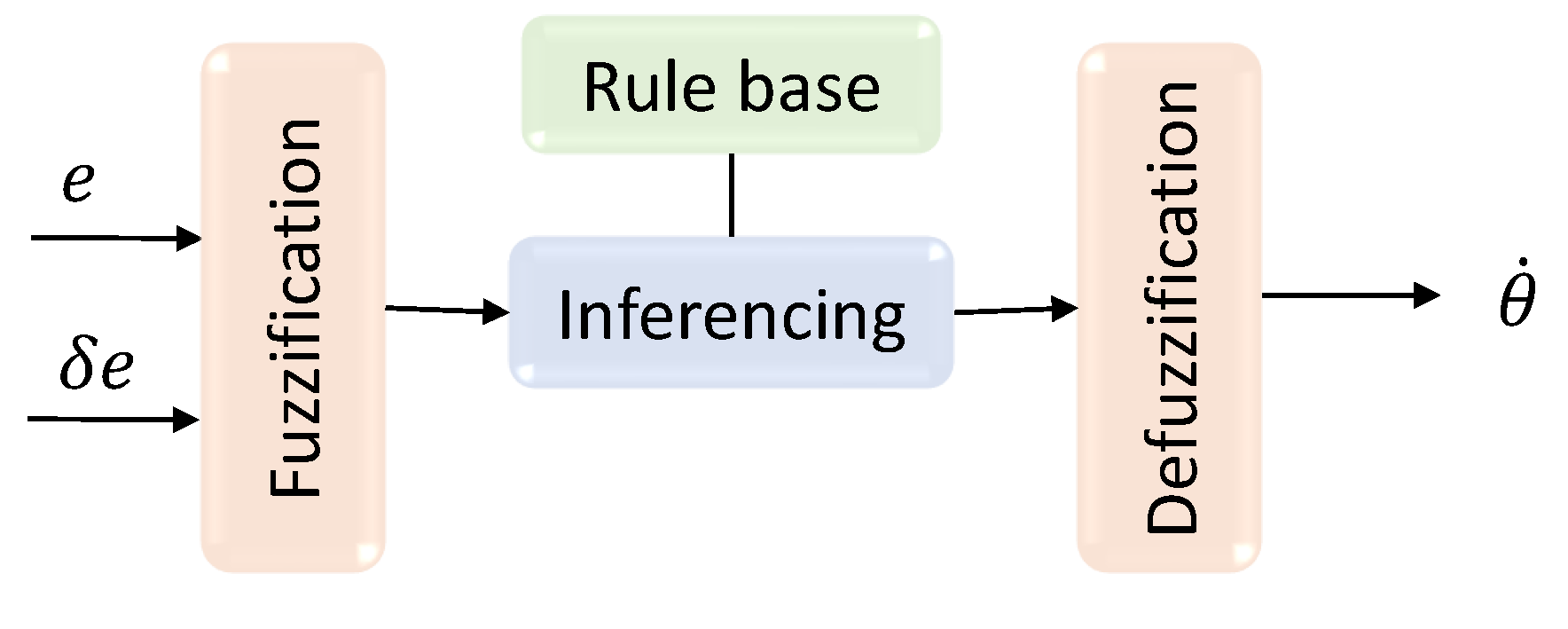
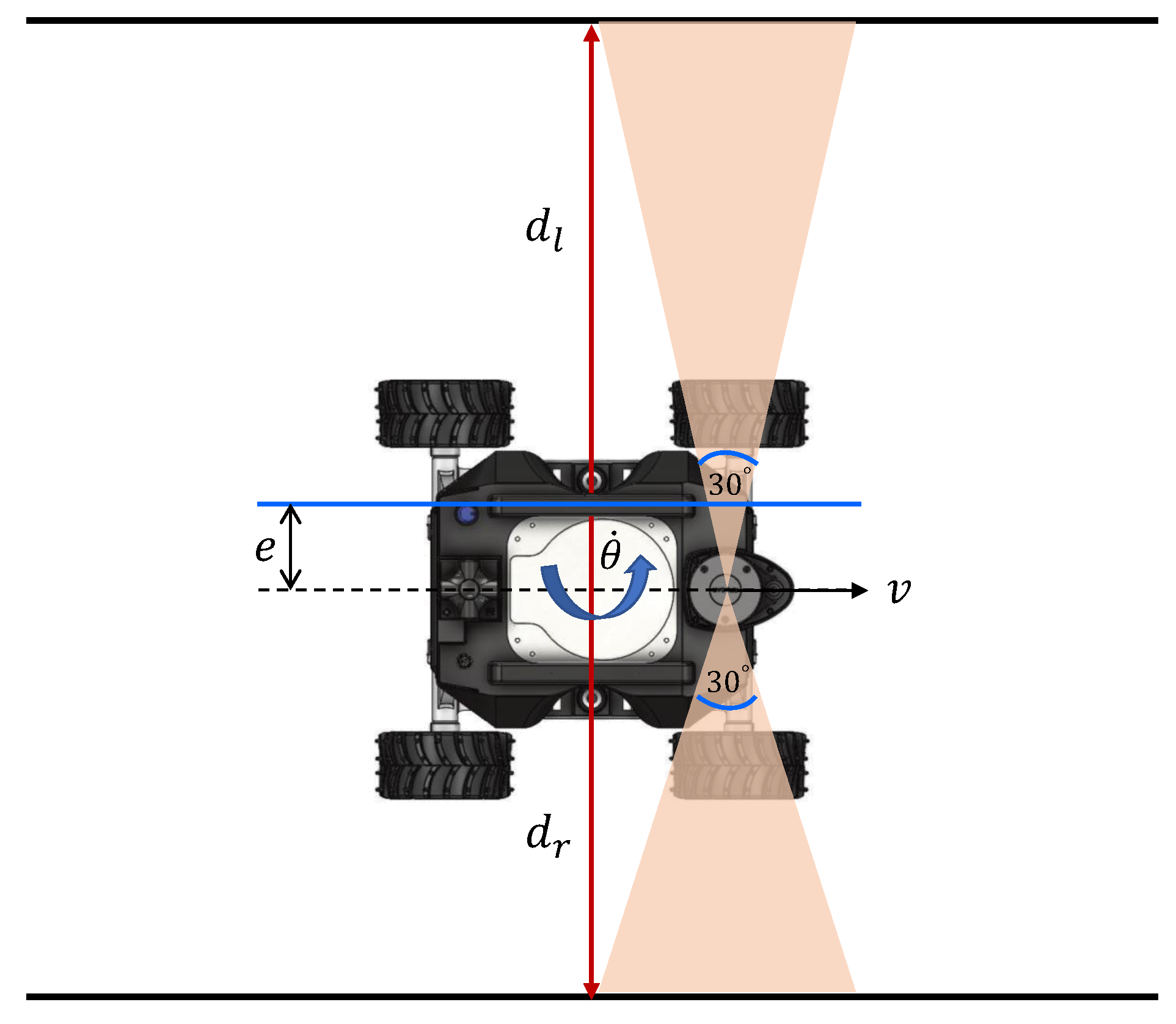
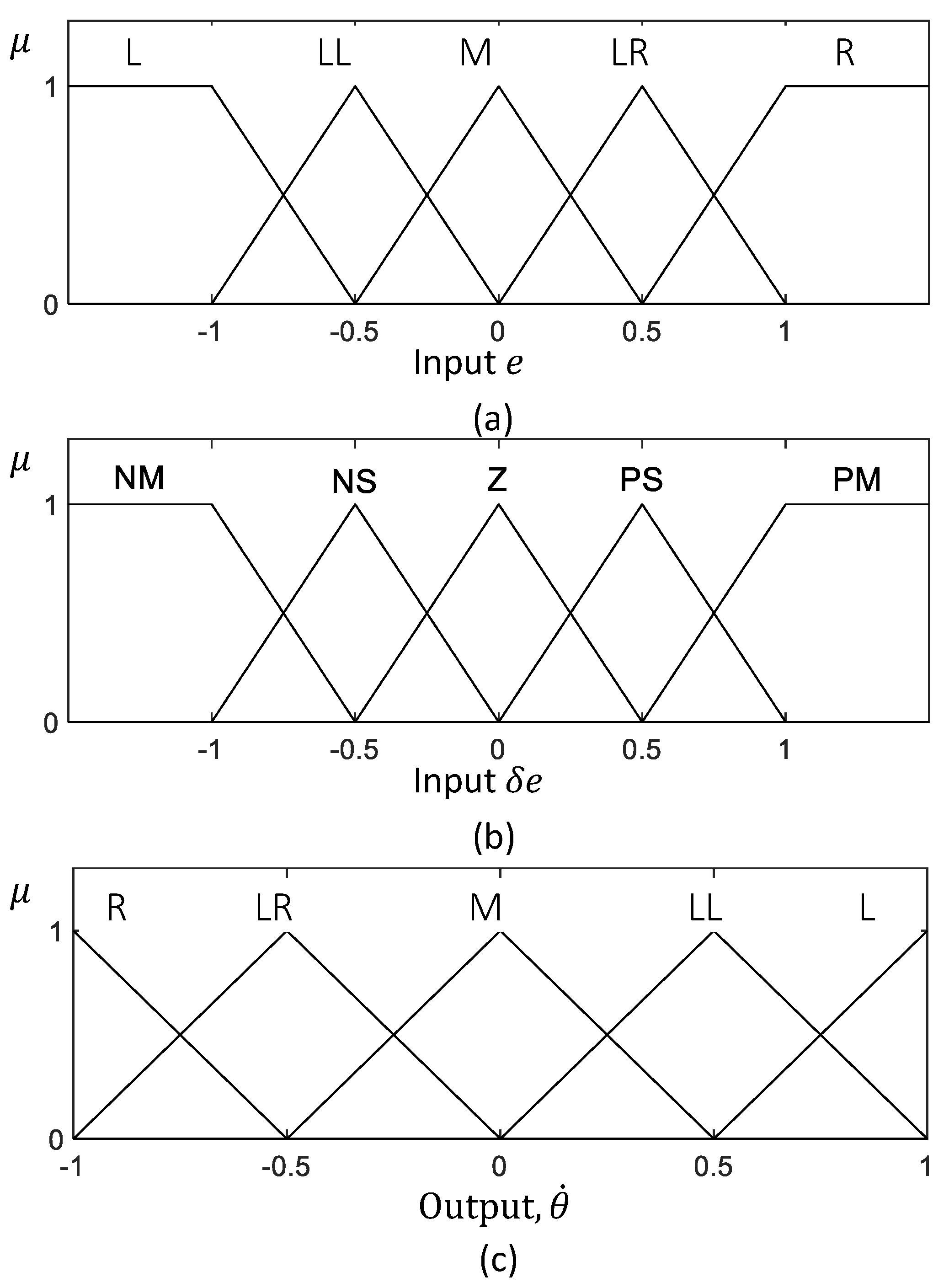
3. Navigating in the Middle of a Drain
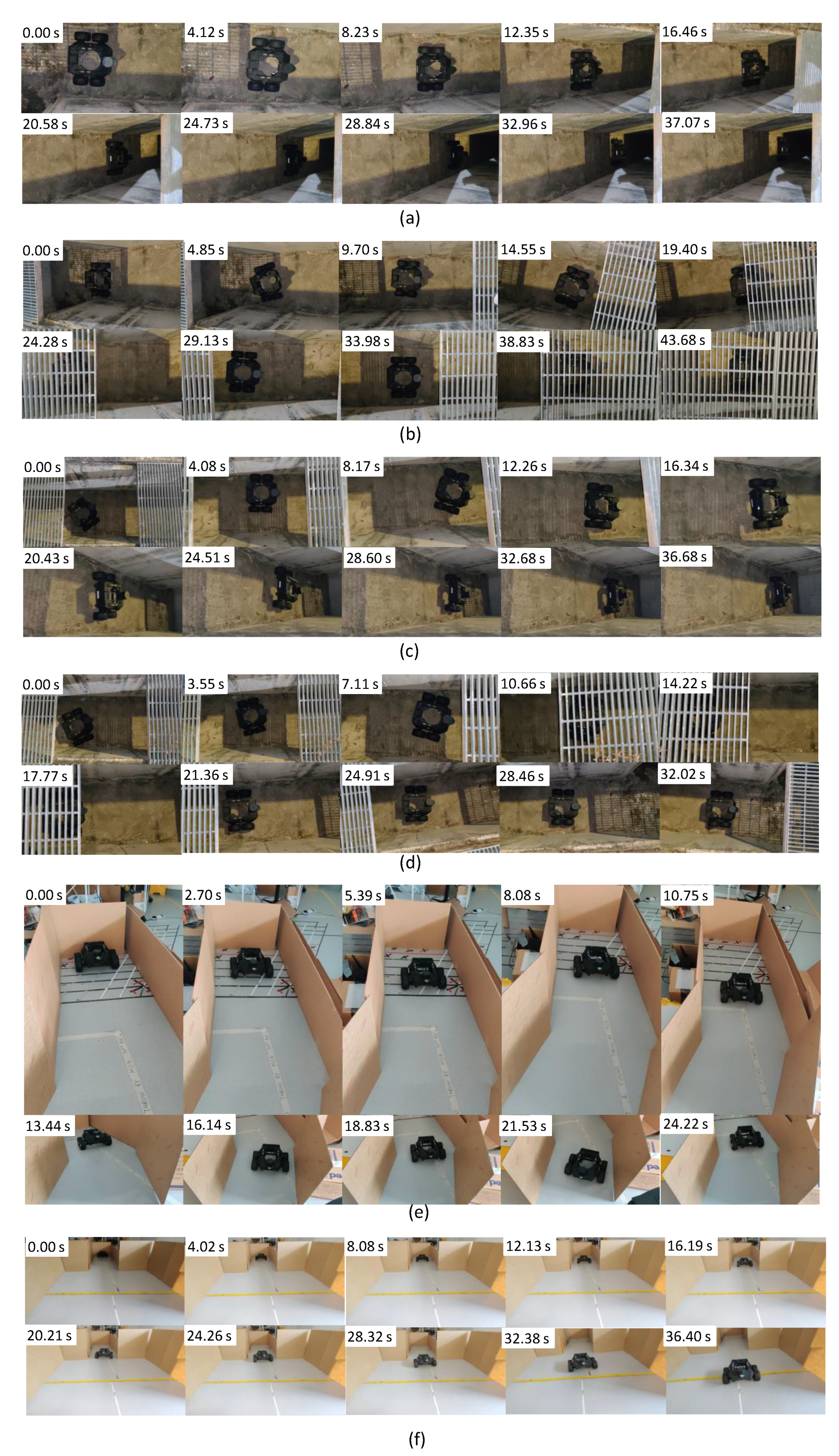
4. Experiments and Results
4.1. Experimental Setup
4.2. Results
4.3. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Luan, I.O.B. Singapore water management policies and practices. In Asian Perspectives on Water Policy; Routledge: Oxfordshire, UK, 2013; pp. 109–124. [Google Scholar]
- World Health Organisation. Water Sanitaion Health-Hygiene. Available online: https://www.who.int/water_sanitation_health/hygiene/settings/hvchap5.pdf?ua=1 (accessed on 20 May 2021).
- Parkinson, J. Urban drainage in developing countries-challenges and opportunities. Waterlines 2002, 20, 2–5. [Google Scholar] [CrossRef]
- Singapore National Water Agency. Drain Cleansing Maintenance. 2020. Available online: https://www.pub.gov.sg/drainage/network/ (accessed on 18 May 2021).
- Seidahmed, O.M.E.; Lu, D.; Chong, C.S.; Ng, L.C.; Eltahir, E.A.B. Patterns of Urban Housing Shape Dengue Distribution in Singapore at Neighborhood and Country Scales. GeoHealth 2018, 2, 54–67. [Google Scholar] [CrossRef]
- Doshi, J.J.M. An Investigation of leaky Sewers As a Source of Fecal Contamination in the Stormwater Drainage System in Singapore. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2012. [Google Scholar]
- Rea, P.; Ottaviano, E. Design and development of an Inspection Robotic System for indoor applications. Robot. Comput.-Integr. Manuf. 2018, 49, 143–151. [Google Scholar] [CrossRef]
- Muthugala, M.A.V.J.; Vega-Heredia, M.; Mohan, R.E.; Vishaal, S.R. Design and Control of a Wall Cleaning Robot with Adhesion-Awareness. Symmetry 2020, 12, 122. [Google Scholar] [CrossRef] [Green Version]
- Samarakoon, S.M.B.P.; Muthugala, M.A.V.J.; Le, A.V.; Elara, M.R. HTetro-infi: A reconfigurable floor cleaning robot with infinite morphologies. IEEE Access 2020, 8, 69816–69828. [Google Scholar] [CrossRef]
- Quenzel, J.; Nieuwenhuisen, M.; Droeschel, D.; Beul, M.; Houben, S.; Behnke, S. Autonomous MAV-based indoor chimney inspection with 3D laser localization and textured surface reconstruction. J. Intell. Robot. Syst. 2019, 93, 317–335. [Google Scholar] [CrossRef]
- Ko, H.; Yi, H.; Jeong, H.E. Wall and ceiling climbing quadruped robot with superior water repellency manufactured using 3D printing (UNIclimb). Int. J. Precis. Eng. Manuf.-Green Technol. 2017, 4, 273–280. [Google Scholar] [CrossRef]
- Ito, F.; Kawaguchi, T.; Kamata, M.; Yamada, Y.; Nakamura, T. Proposal of a Peristaltic Motion Type Duct Cleaning Robot for Traveling in a Flexible Pipe. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 6614–6621. [Google Scholar]
- Ogai, H.; Bhattacharya, B. Pipe Inspection Robots for Structural Health and Condition Monitoring; Springer: New Delhi, India, 2018. [Google Scholar]
- Yu, L.; Yang, E.; Ren, P.; Luo, C.; Dobie, G.; Gu, D.; Yan, X. Inspection Robots in Oil and Gas Industry: A Review of Current Solutions and Future Trends. In Proceedings of the 2019 25th International Conference on Automation and Computing (ICAC), Lancaster, UK, 5–7 September 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Hayat, A.A.; Elangovan, K.; Rajesh Elara, M.; Teja, M.S. Tarantula: Design, Modeling, and Kinematic Identification of a Quadruped Wheeled Robot. Appl. Sci. 2019, 9, 94. [Google Scholar] [CrossRef] [Green Version]
- Kirkham, R.; Kearney, P.D.; Rogers, K.J.; Mashford, J. PIRAT—A system for quantitative sewer pipe assessment. Int. J. Robot. Res. 2000, 19, 1033–1053. [Google Scholar] [CrossRef]
- Kuntze, H.; Schmidt, D.; Haffner, H.; Loh, M. KARO-A flexible robot for smart sensor-based sewer inspection. In Proceedings of the International Conference on No Dig’95, Dresden, Germany, 19–22 September 1995; pp. 367–374. [Google Scholar]
- Nassiraei, A.A.; Kawamura, Y.; Ahrary, A.; Mikuriya, Y.; Ishii, K. Concept and design of a fully autonomous sewer pipe inspection mobile robot “kantaro”. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 136–143. [Google Scholar]
- Kirchner, F.; Hertzberg, J. A prototype study of an autonomous robot platform for sewerage system maintenance. Auton. Robot. 1997, 4, 319–331. [Google Scholar] [CrossRef]
- Streich, H.; Adria, O. Software approach for the autonomous inspection robot MAKRO. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3411–3416. [Google Scholar]
- Parween, R.; Muthugala, M.; Heredia, M.V.; Elangovan, K.; Elara, M.R. Collision Avoidance and Stability Study of a Self-Reconfigurable Drainage Robot. Sensors 2021, 21, 3744. [Google Scholar] [CrossRef] [PubMed]
- Rayhana, R.; Jiao, Y.; Zaji, A.; Liu, Z. Automated Vision Systems for Condition Assessment of Sewer and Water Pipelines. IEEE Trans. Autom. Sci. Eng. 2020, 1–18. [Google Scholar] [CrossRef]
- Makantasis, K.; Protopapadakis, E.; Doulamis, A.; Doulamis, N.; Loupos, C. Deep Convolutional Neural Networks for efficient vision based tunnel inspection. In Proceedings of the 2015 IEEE International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 3–5 September 2015; pp. 335–342. [Google Scholar] [CrossRef]
- Cha, Y.; Choi, W.; Büyüköztürk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Selvaraj, V. Autonomous Drain Inspection: A Deep Learning Approach. Master’s Thesis, National University of Singapore, Singapore, 2019. [Google Scholar]
- Broggi, A.; Caraffi, C.; Fedriga, R.; Grisleri, P. Obstacle Detection with Stereo Vision for Off-Road Vehicle Navigation. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 21–23 September 2015; p. 65. [Google Scholar] [CrossRef]
- Al-Kaff, A.; Garcia, F.; Martín Gómez, D.; de la Escalera, A.; Armingol, J. Obstacle Detection and Avoidance System Based on Monocular Camera and Size Expansion Algorithm for UAVs. Sensors 2017, 17, 1061. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Xu, X.; Xu, H.; Chang, Y.; Wang, Q.; Chen, J. Implementation of a Reconfigurable Robot to Achieve Multimodal Locomotion Based on Three Rules of Configuration. Robotica 2020, 38, 1478–1494. [Google Scholar] [CrossRef]
- Samarakoon, S.; Muthugala, M.; Elara, M.R. Toward Pleomorphic Reconfigurable Robots for Optimum Coverage. Complexity 2021, 2021, 3705365. [Google Scholar] [CrossRef]
- De Silva, C.W. Intelligent Control: Fuzzy Logic Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Samarakoon, S.B.P.; Muthugala, M.V.J.; Elara, M.R. Toward obstacle-specific morphology for a reconfigurable tiling robot. J. Ambient. Intell. Humaniz. Comput. 2021, 1–13. [Google Scholar] [CrossRef]
- Ross, T.J. Fuzzy Logic with Engineering Applications; John Wiley & Sons: West Sussex, UK, 2005. [Google Scholar]
- Ibarra, L.; Webb, C. Advantages of fuzzy control while dealing with complex/unknown model dynamics: A quadcopter example. In New Applications of Artificial Intelligence; InTech: Rijeka, Croatia, 2016; p. 93. [Google Scholar]
- Muthugala, M.V.J.; Samarakoon, S.B.P.; Elara, M.R. Tradeoff between area coverage and energy usage of a self-reconfigurable floor cleaning robot based on user preference. IEEE Access 2020, 8, 76267–76275. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Walker, C.L.; Walker, E.A. A First Course in Fuzzy Logic; CRC Press: New York, NY, USA, 2018. [Google Scholar]
- Ren, Q.; Bigras, P. A highly accurate model-free motion control system with a Mamdani fuzzy feedback controller Combined with a TSK fuzzy feed-forward controller. J. Intell. Robot. Syst. 2017, 86, 367–379. [Google Scholar] [CrossRef]
- Masmoudi, M.S.; Krichen, N.; Masmoudi, M.; Derbel, N. Fuzzy logic controllers design for omnidirectional mobile robot navigation. Appl. Soft Comput. 2016, 49, 901–919. [Google Scholar] [CrossRef]
- Kumar, N.; Takács, M.; Vámossy, Z. Robot navigation in unknown environment using fuzzy logic. In Proceedings of the 2017 IEEE 15th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 26–28 January 2017; pp. 000279–000284. [Google Scholar]
- Omrane, H.; Masmoudi, M.S.; Masmoudi, M. Fuzzy logic based control for autonomous mobile robot navigation. Comput. Intell. Neurosci. 2016, 2016, 9548482. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | Design Requirements * | |||||
|---|---|---|---|---|---|---|
| a | b | c | d | e | f | |
| PIRAT [16] | High | Low | Yes | High | Yes | Yes |
| KARO [17] | High | Low | Yes | High | Yes | Yes |
| KANTARO [18] | High | Low | Yes | High | Yes | Yes |
| KURT [19] | High | Low | Yes | High | Yes | Yes |
| MAKRO [20] | Medium | Low | No (lengthy) | Low | Yes | Yes |
| Tarantula [15] | Low | High | No (bulky) | Low | Yes | Yes |
| Raptor (proposed design) | High | High | Yes | High | Yes | Yes |
| L | LL | M | LR | R | |
|---|---|---|---|---|---|
| NM | R | R | R | LR | M |
| NS | R | R | LR | M | LL |
| Z | R | LR | M | LL | L |
| PS | LR | M | LL | L | L |
| PM | M | LL | L | L | L |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muthugala, M.A.V.J.; Palanisamy, P.; Samarakoon, S.M.B.P.; Padmanabha, S.G.A.; Elara, M.R.; Terntzer, D.N. Raptor: A Design of a Drain Inspection Robot. Sensors 2021, 21, 5742. https://doi.org/10.3390/s21175742
Muthugala MAVJ, Palanisamy P, Samarakoon SMBP, Padmanabha SGA, Elara MR, Terntzer DN. Raptor: A Design of a Drain Inspection Robot. Sensors. 2021; 21(17):5742. https://doi.org/10.3390/s21175742
Chicago/Turabian StyleMuthugala, M. A. Viraj J., Povendhan Palanisamy, S. M. Bhagya P. Samarakoon, Saurav Ghante Anantha Padmanabha, Mohan Rajesh Elara, and Dylan Ng Terntzer. 2021. "Raptor: A Design of a Drain Inspection Robot" Sensors 21, no. 17: 5742. https://doi.org/10.3390/s21175742
APA StyleMuthugala, M. A. V. J., Palanisamy, P., Samarakoon, S. M. B. P., Padmanabha, S. G. A., Elara, M. R., & Terntzer, D. N. (2021). Raptor: A Design of a Drain Inspection Robot. Sensors, 21(17), 5742. https://doi.org/10.3390/s21175742