
Shared Steering Control for Lane Keeping and Obstacle Avoidance Based on Multi-Objective MPC


Abstract
:1. Introduction
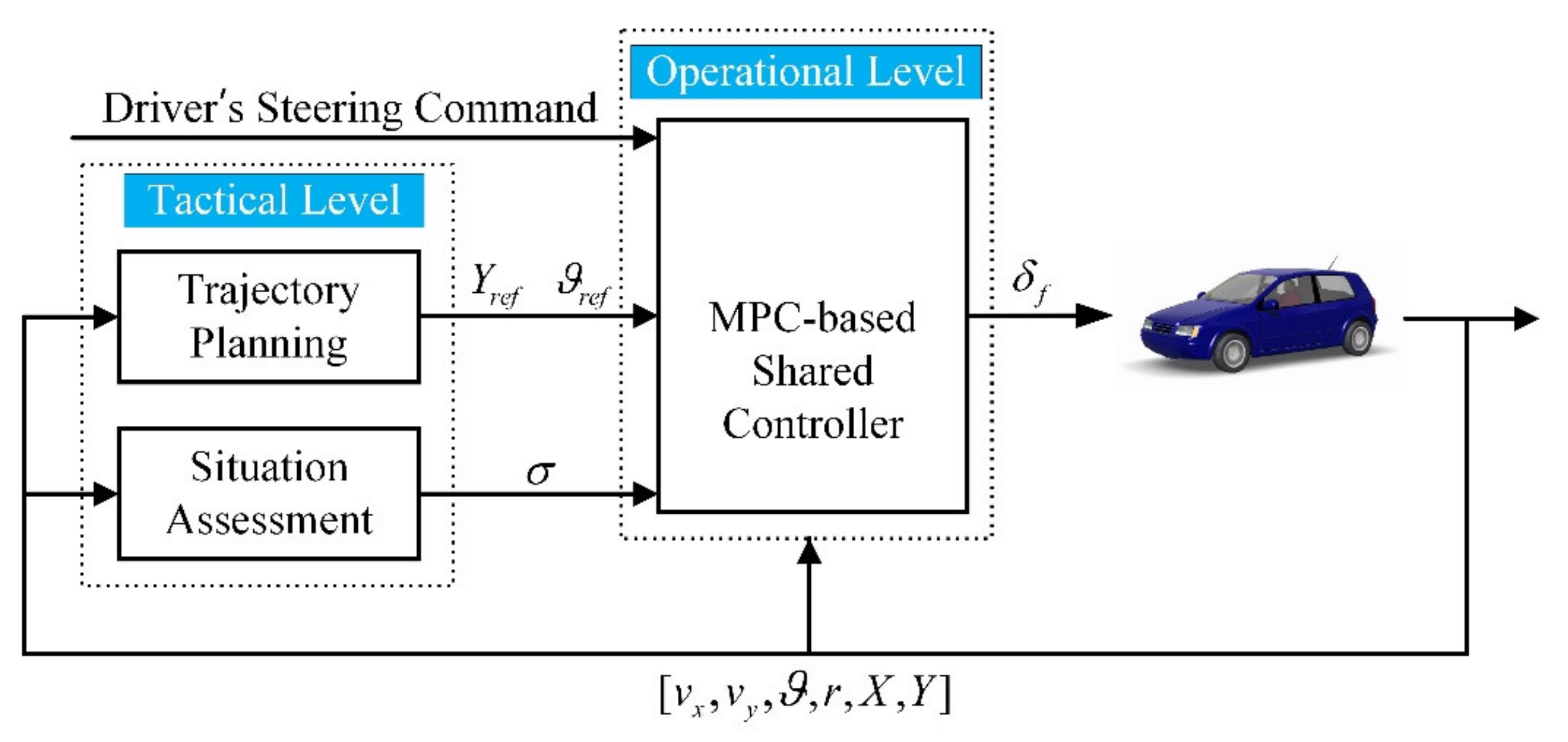
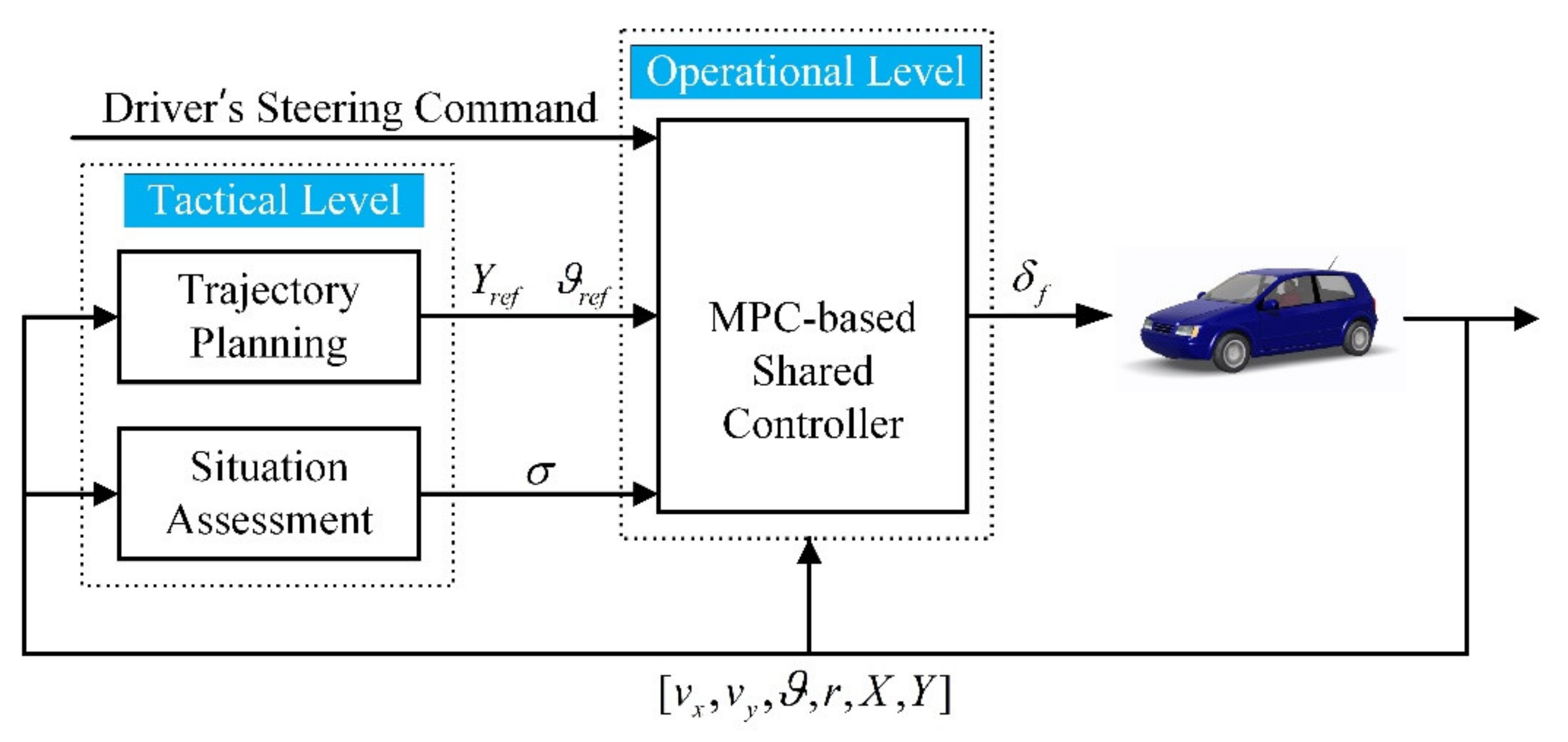
- A new shared control framework based on MPC is proposed, which includes an NMPC-based trajectory planning module, a situation assessment module considering both lateral and longitudinal risks, and a shared control module based on multi-objective MPC.
- A shared control scheme based on multi-objective MPC is proposed, in which matching the driver’s commands and tracking the reference trajectories are both taken as the optimization objectives, and the authority of the driver and the automation are allocated by adjusting the weights of the two objectives, which are determined by the situation assessment module.
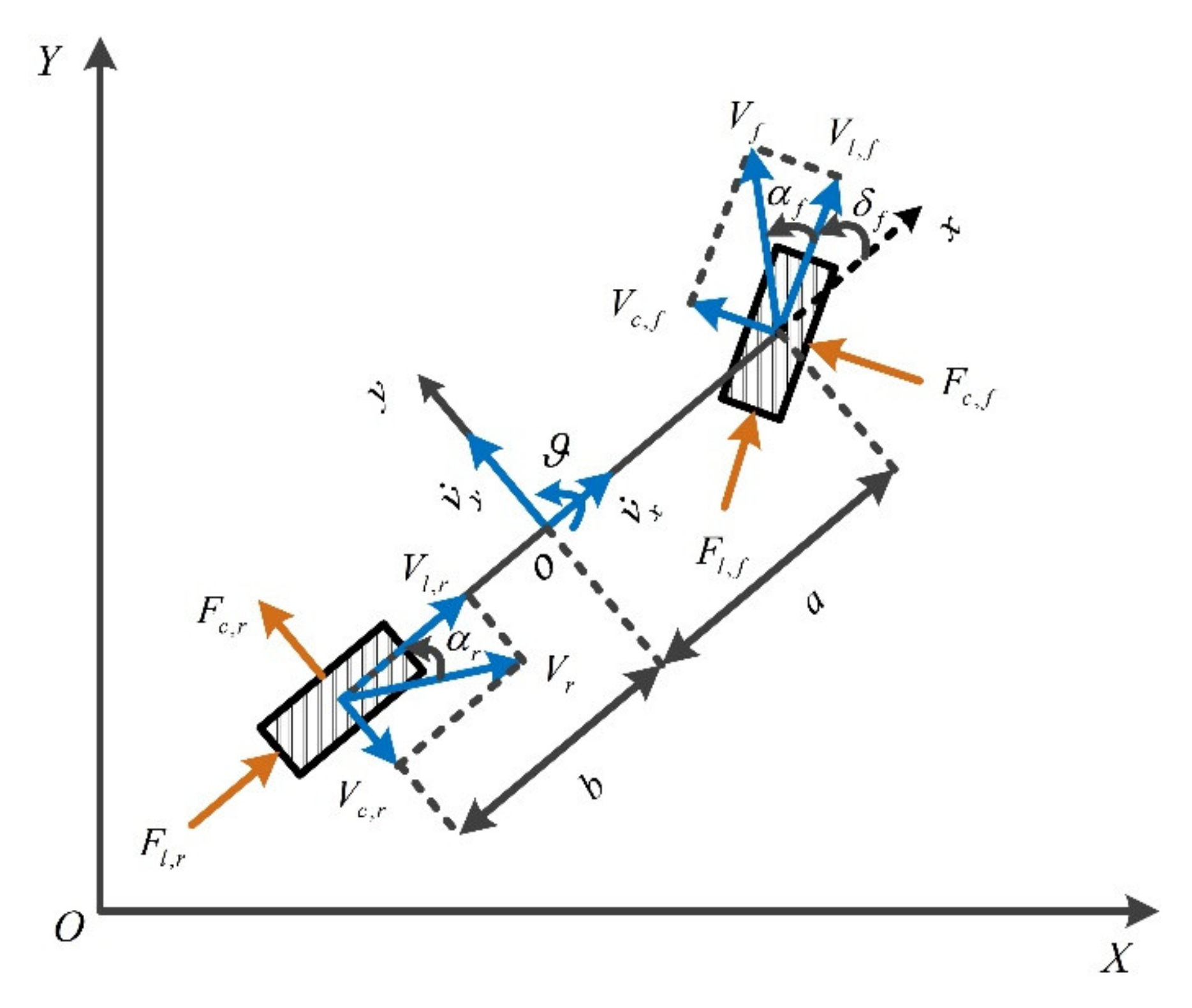
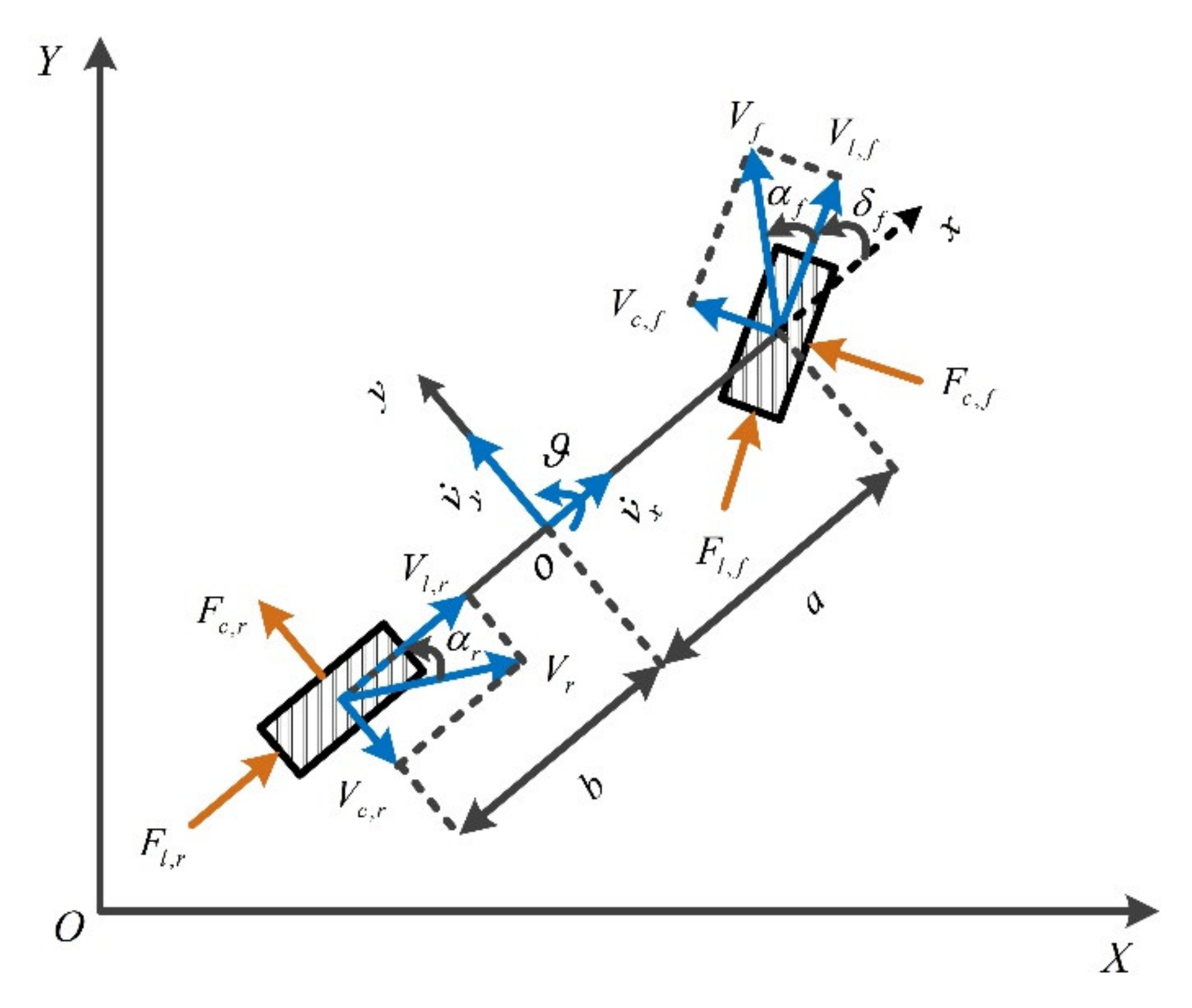
2. Vehicle Model
3. Dynamic Trajectory Planning Based on NMPC
4. MPC-Based Shared Controller
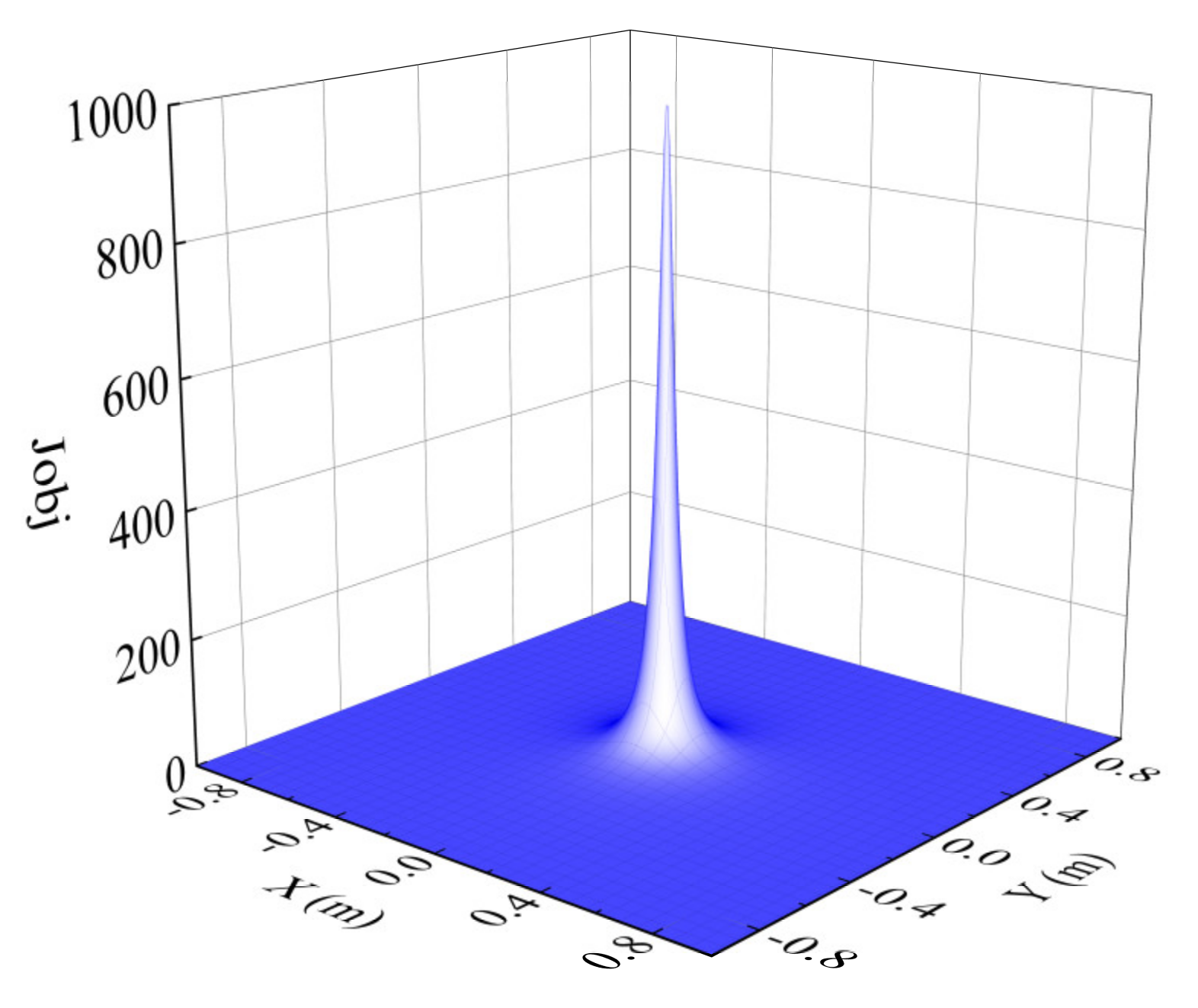
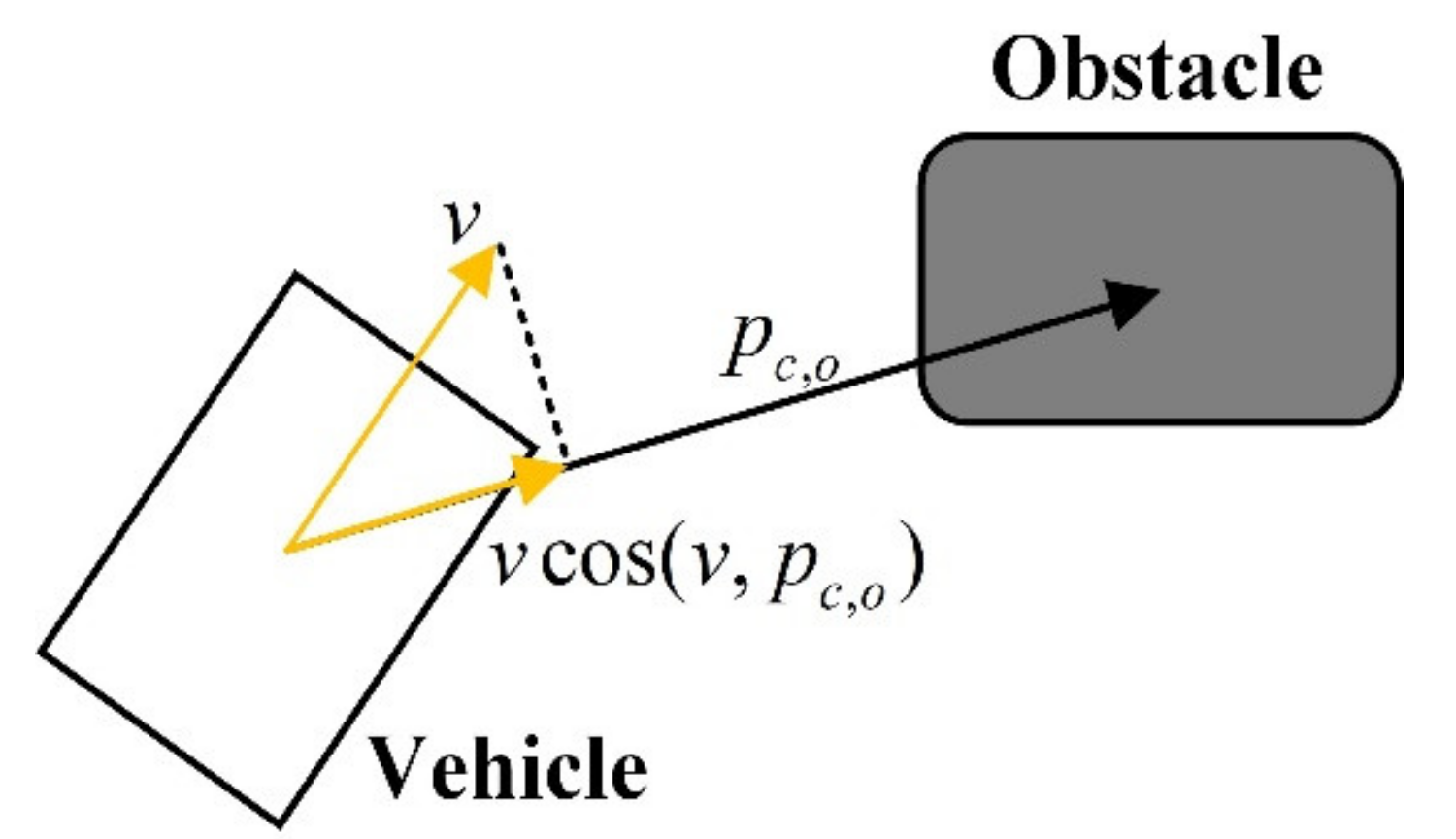
4.1. Situation Assessment
4.2. Design of MPC Shared Controller
5. Simulation Results and Analysis
- Distracted driving with no steering command;
- Obstacle avoidance in a panic with oscillating steering commands;
- Driver’s stochastic steering commands.
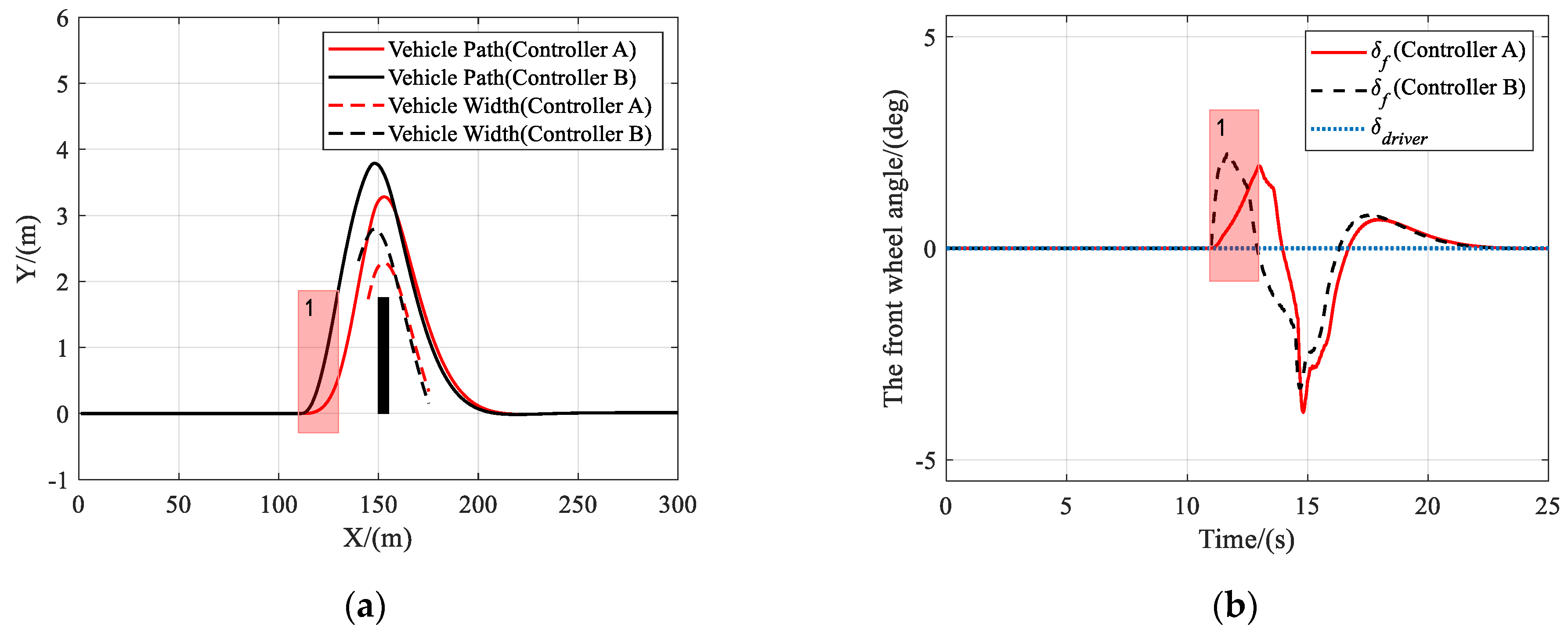
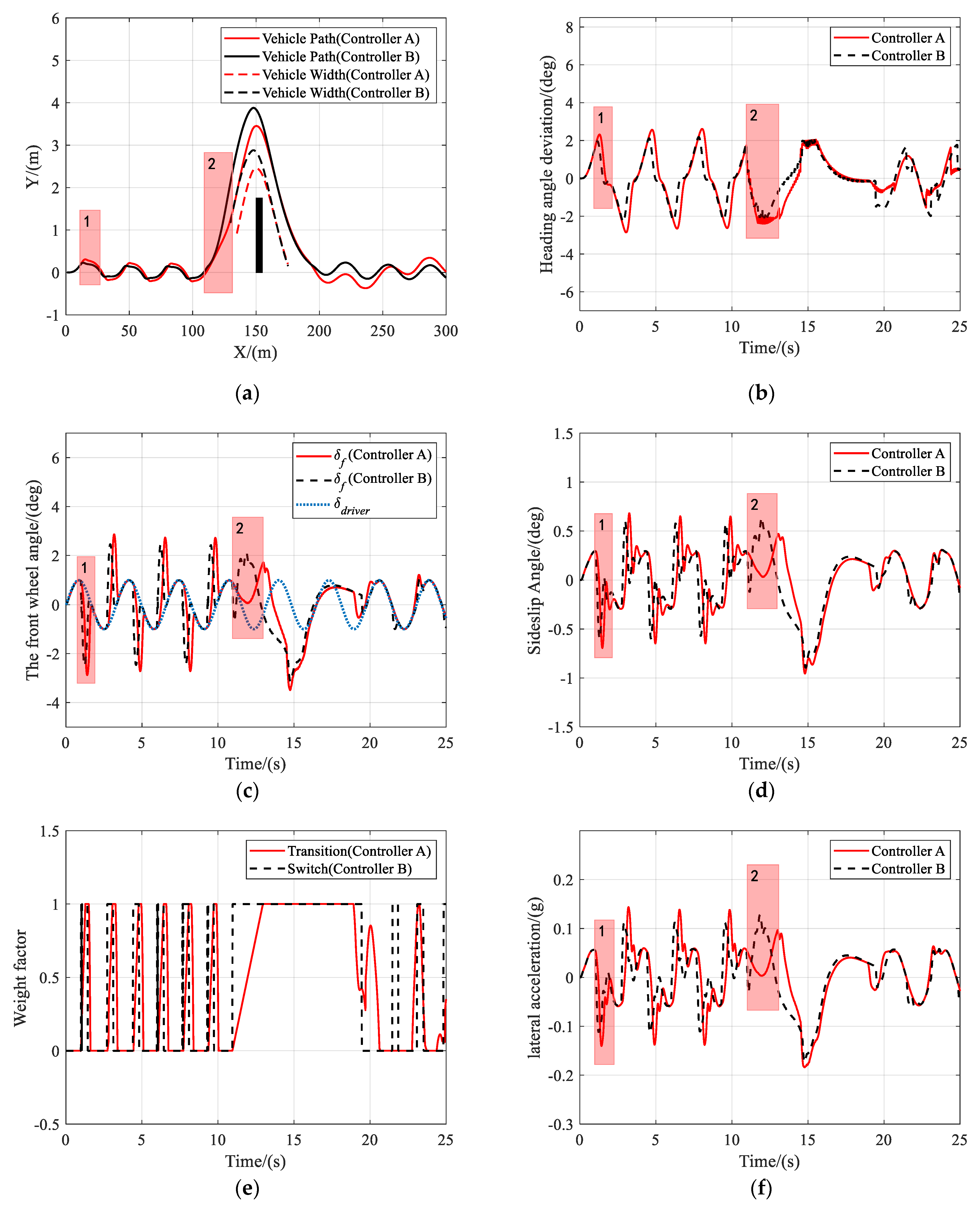
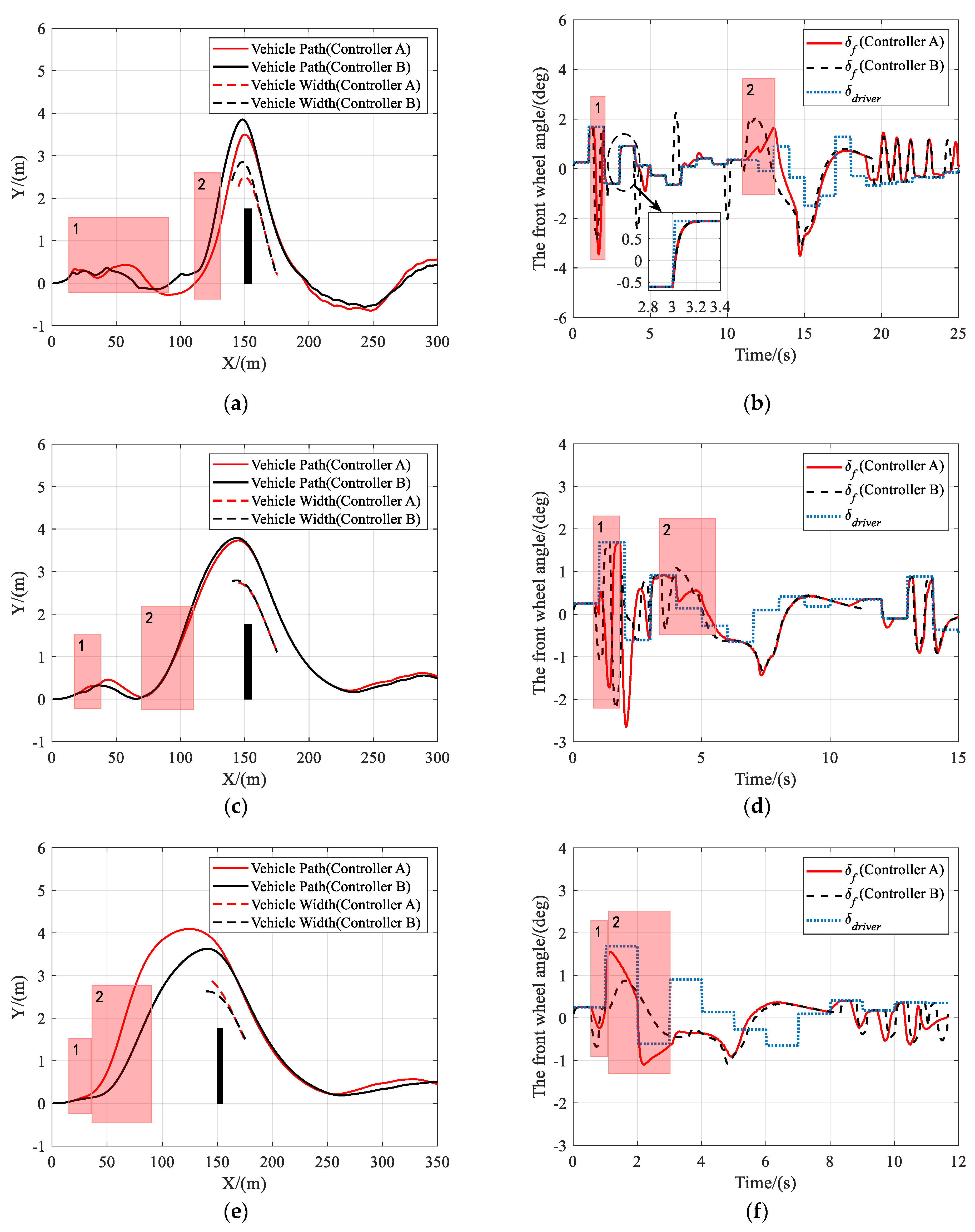
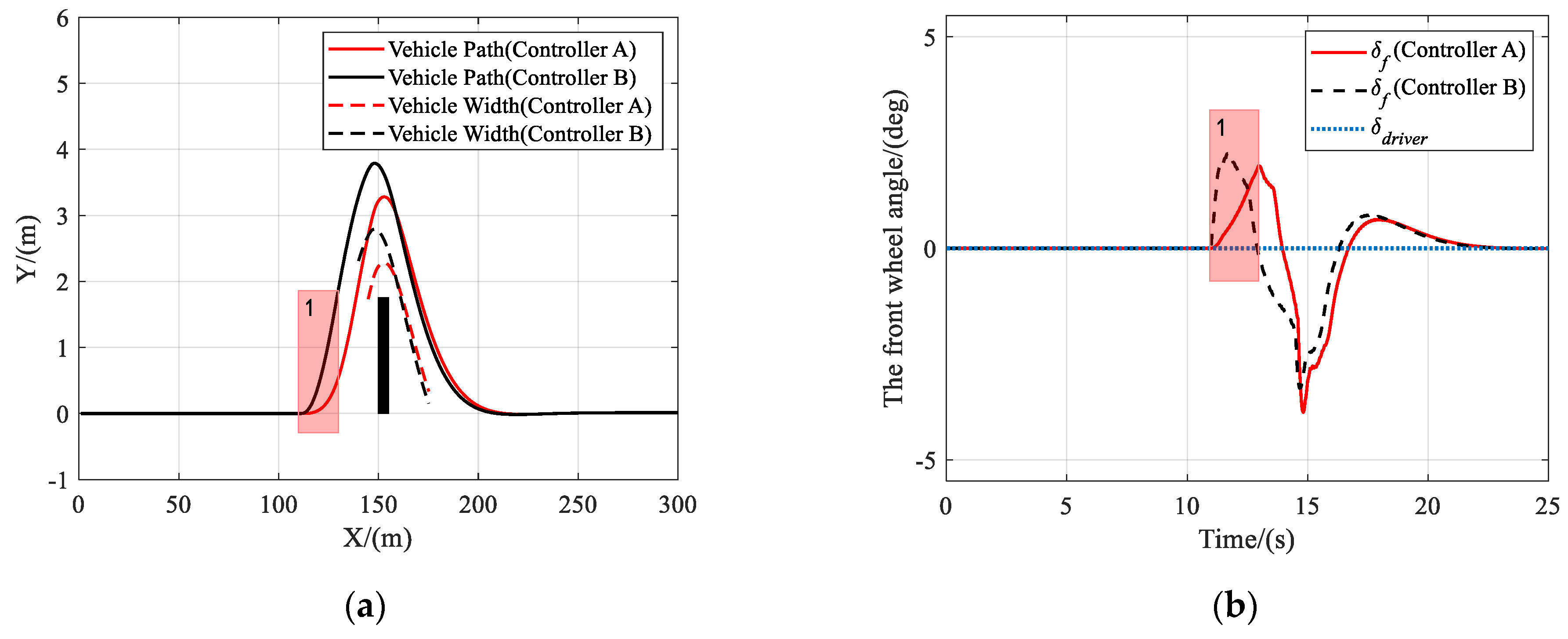
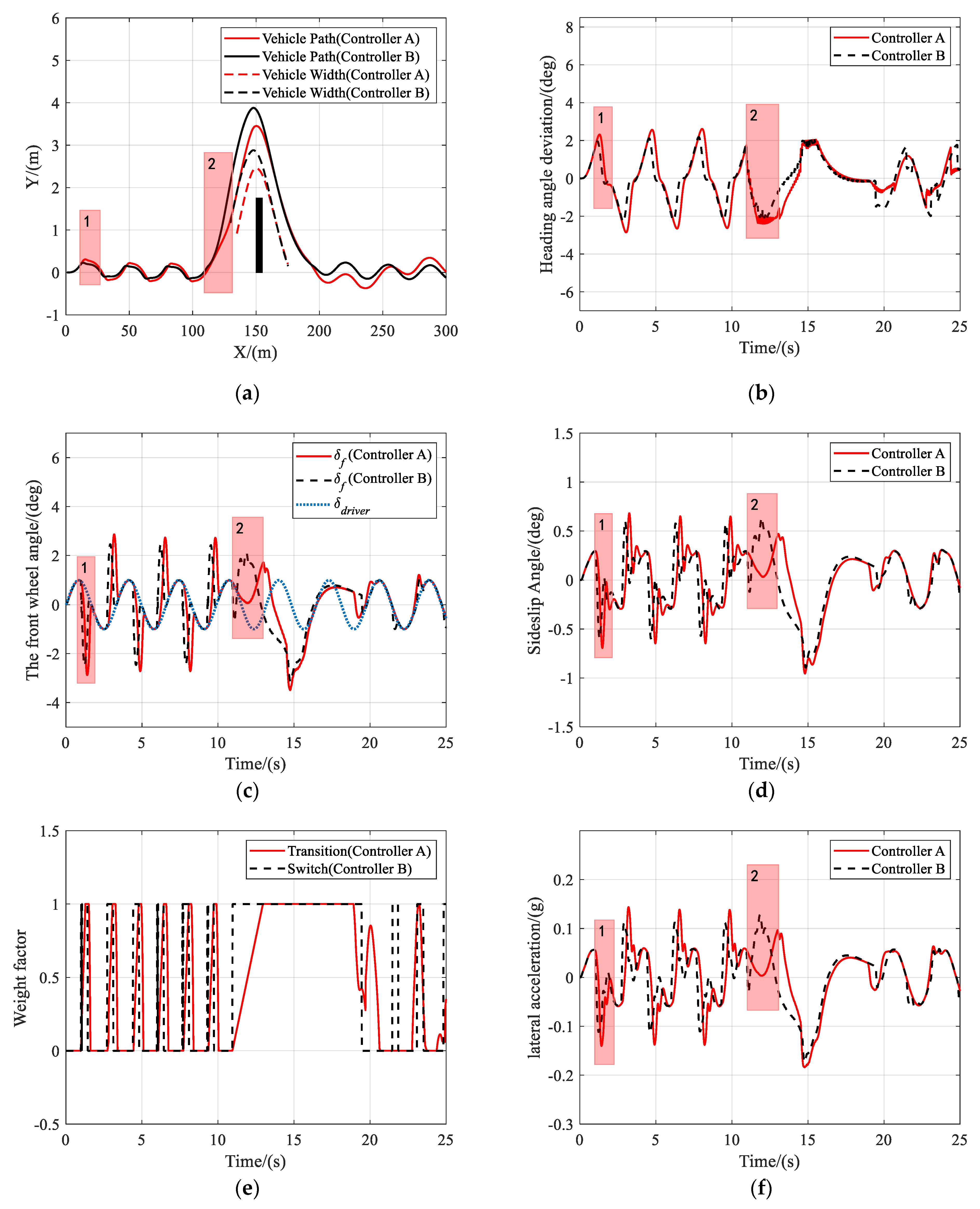
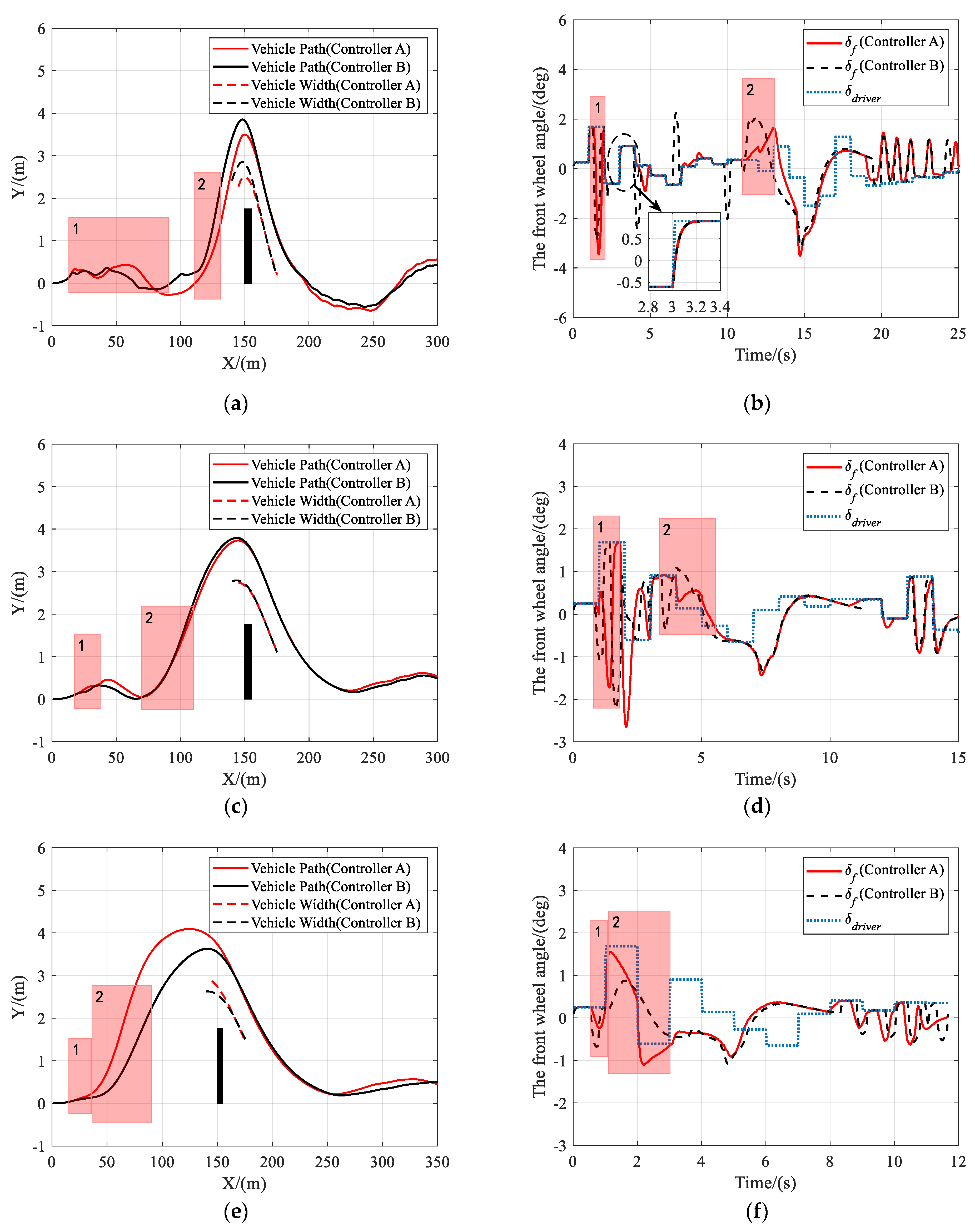
5.1. Results and Analysis of Scenario 1
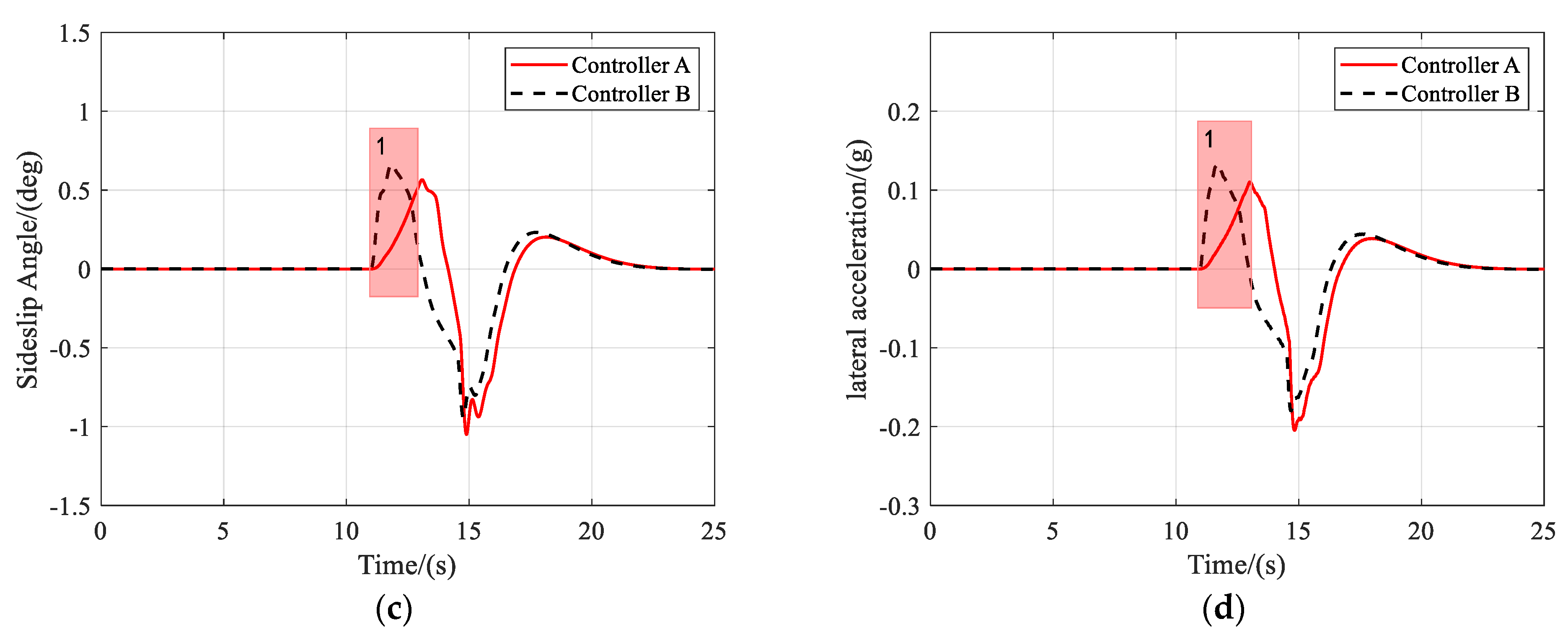
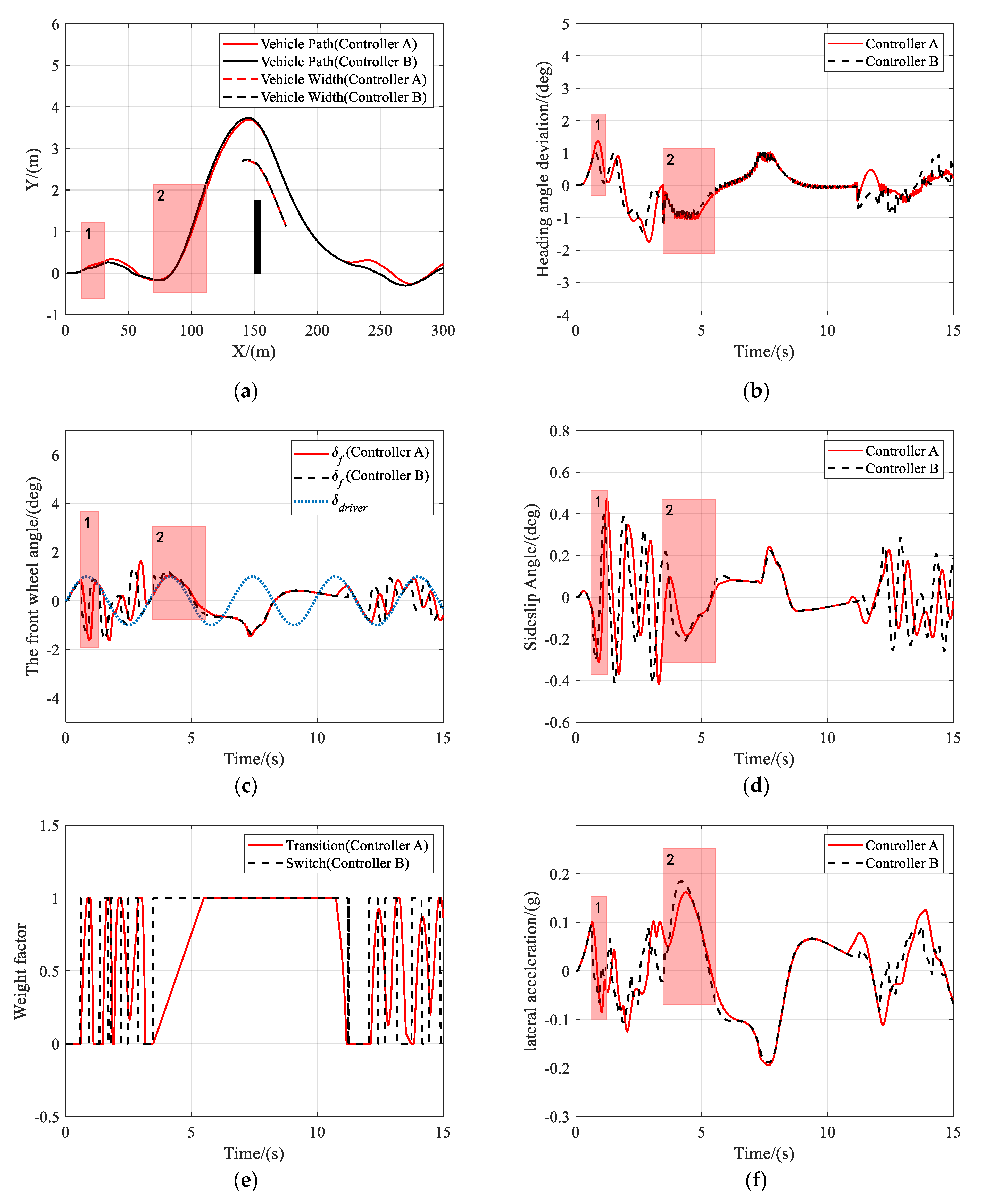
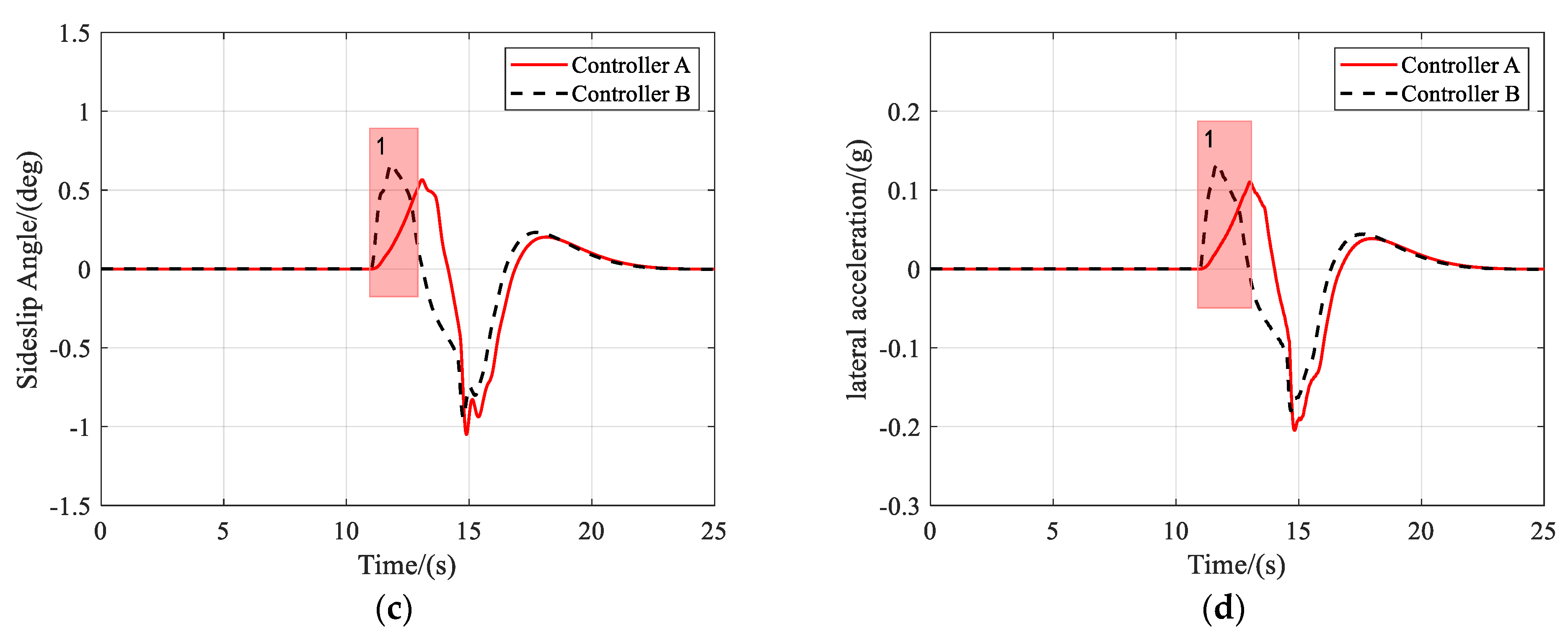
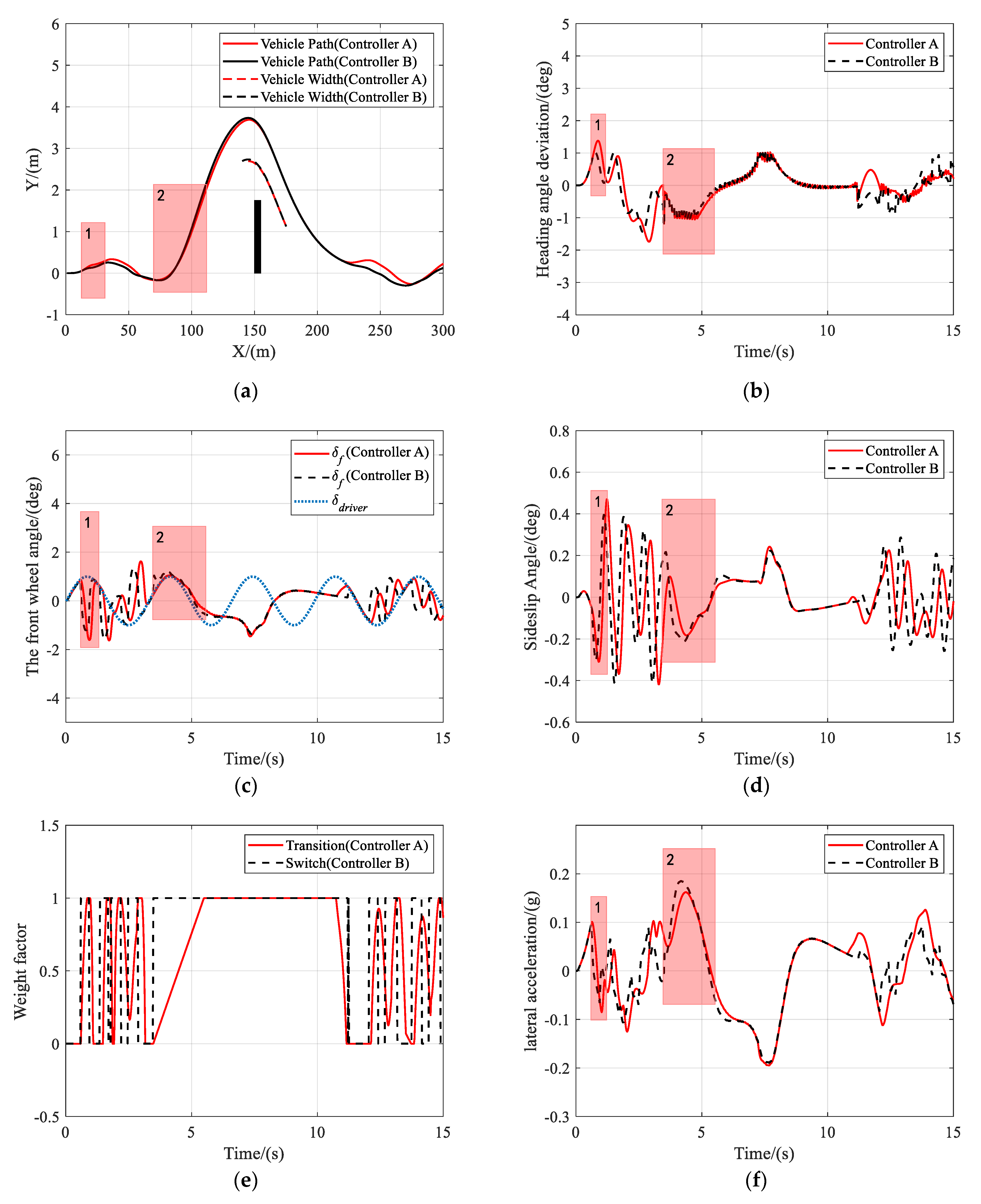
5.2. Results and Analysis of Scenario 2
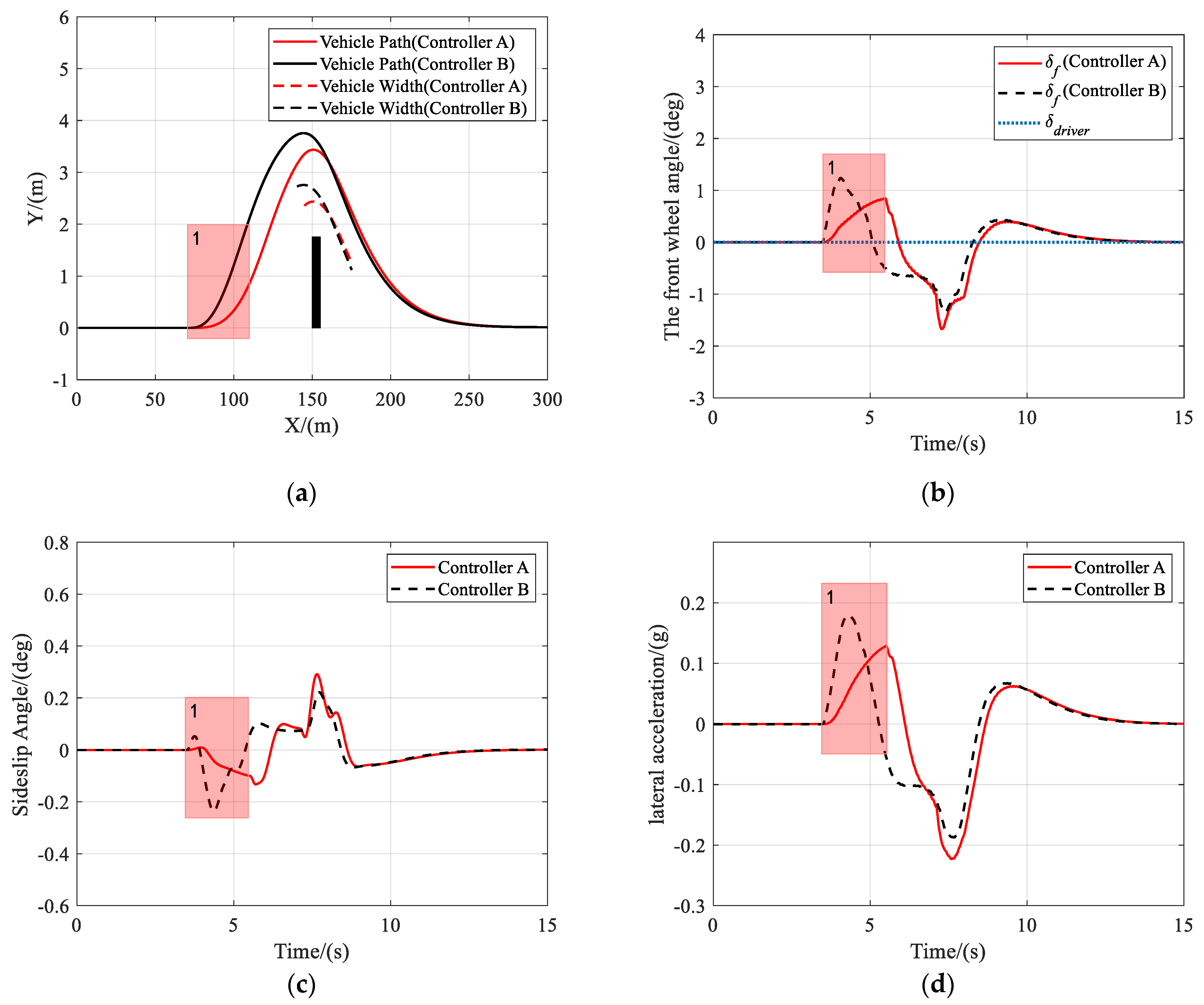
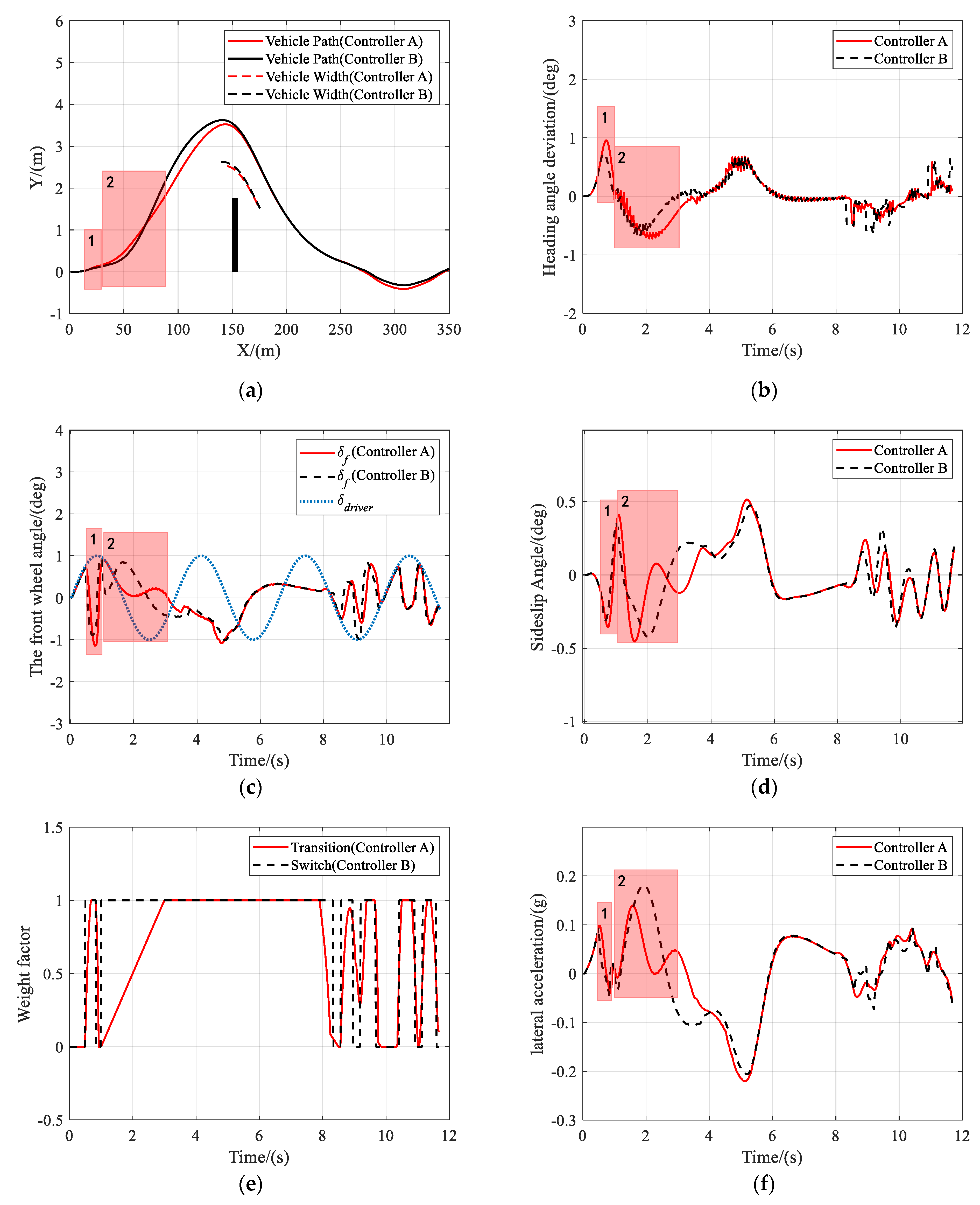
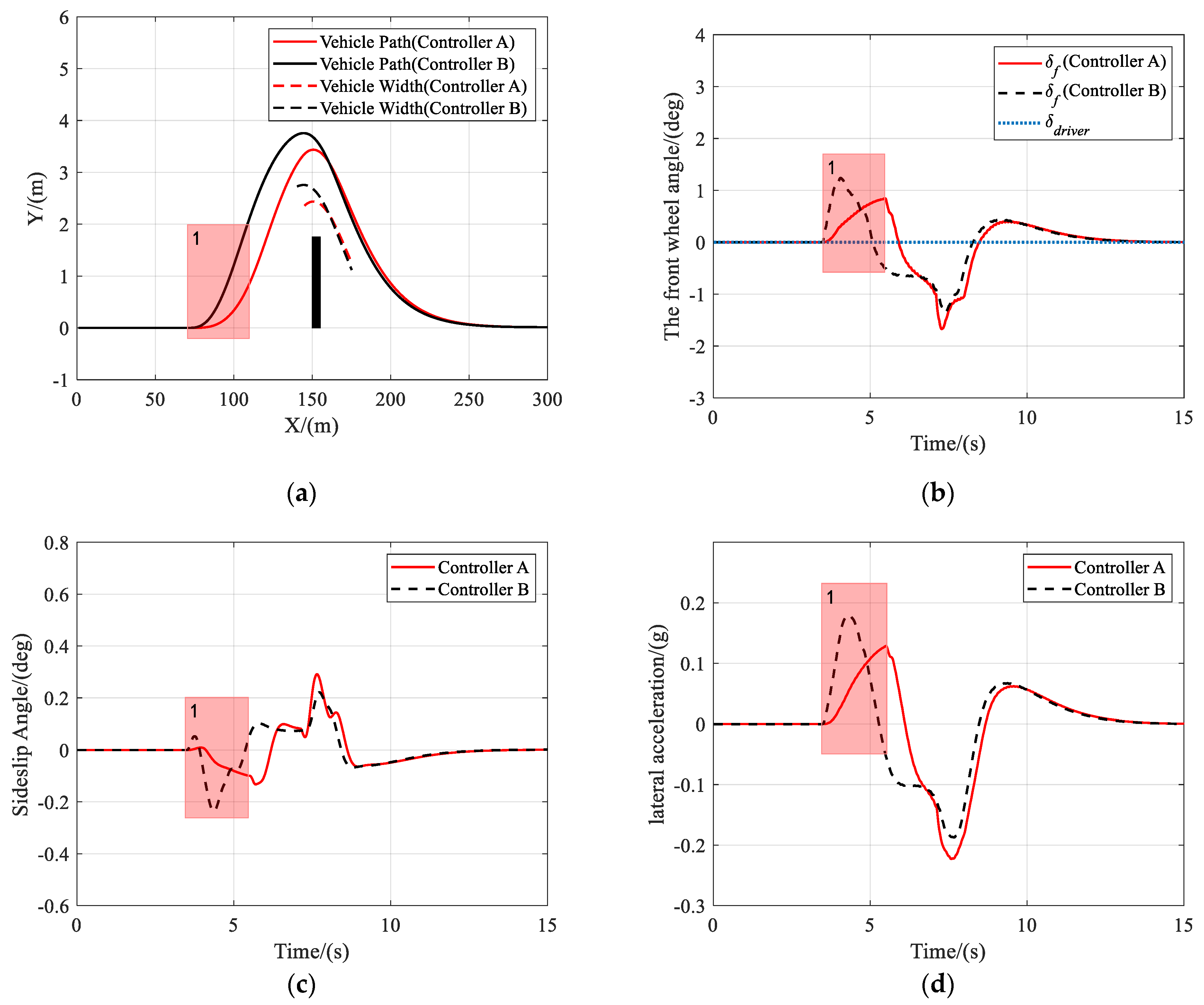
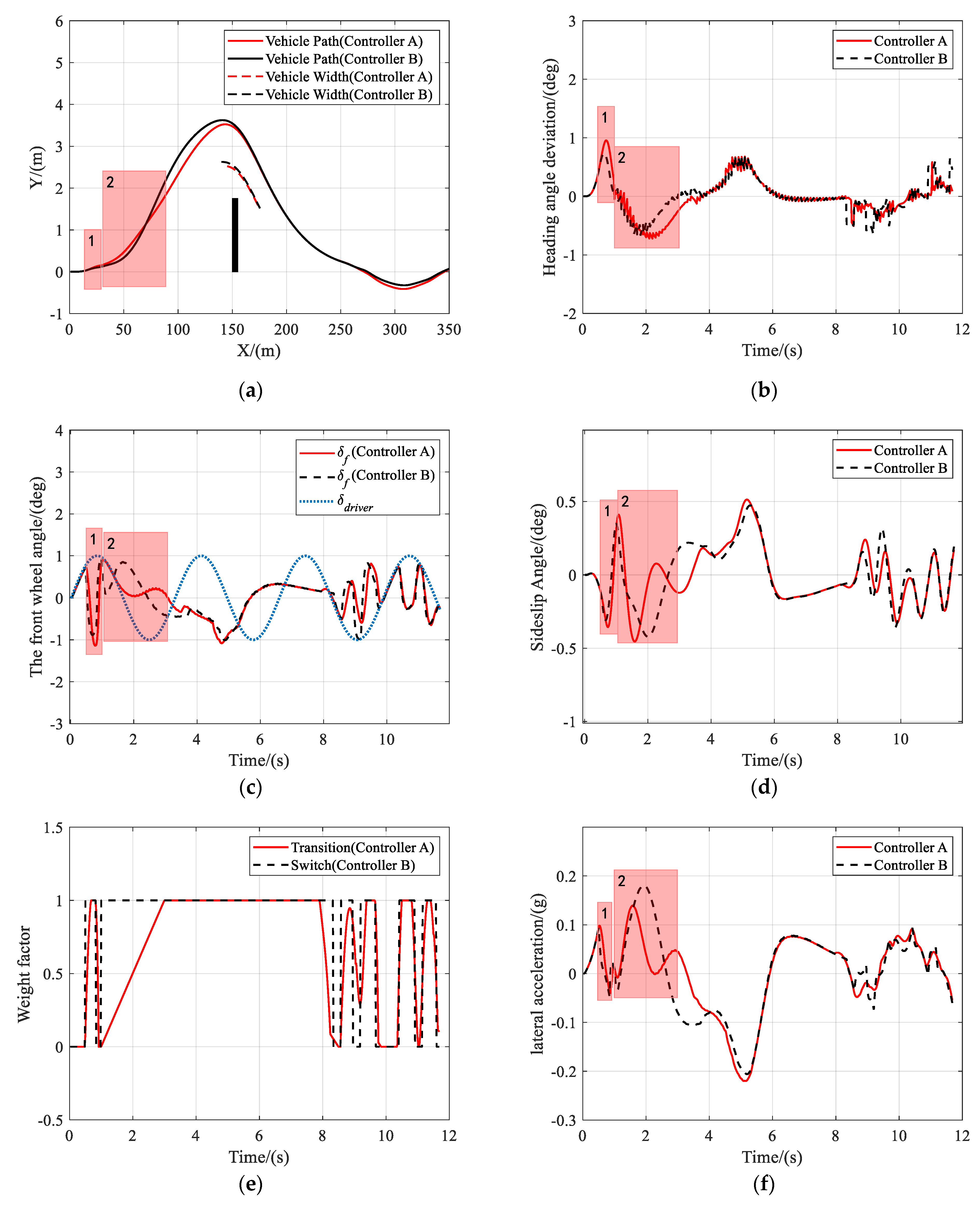
5.3. Results and Analysis of Scenario 3
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nunes, A.; Reimer, B.; Coughlin, J.F. People must retain control of autonomous vehicles. Nature 2018, 556, 169–171. [Google Scholar] [CrossRef] [Green Version]
- Maurer, M.; Gerdes, J.C.; Lenz, B.; Winner, H. Autonomous Driving: Technical, Legal and Social Aspects; Springer Nature: Basingstoke, UK, 2016. [Google Scholar]
- SAE. On-Road Automated Vehicle Standards Committee. Taxonomy and definitions for terms related to on-road motor vehicle automated driving systems. SAE Stand. J. 2014, 3016, 1–16. [Google Scholar]
- Kyriakidis, M.; Weijer, C.V.D.; Arem, B.V.; Happee, R. The Deployment of Advanced Driver Assistance Systems in Europe. In Proceedings of the 22nd ITS World Congress, Bordeaux, France, 5–9 October 2015. [Google Scholar]
- Li, L.; Wen, D.; Zheng, N.; Shen, L. Cognitive Cars: A New Frontier for ADAS Research. IEEE Trans. Intell. Transp. Syst. 2012, 13, 395–407. [Google Scholar] [CrossRef]
- Enache, N.M.; Mammar, S.; Netto, M.; Lusetti, B. Driver Steering Assistance for Lane-Departure Avoidance Based on Hybrid Automata and Composite Lyapunov Function. IEEE Trans. Intell. Transp. Syst. 2010, 11, 28–39. [Google Scholar] [CrossRef]
- Wada, T.; Sonoda, K.; Okasaka, T.; Saito, T. Authority Transfer Method from Automated to Manual Driving via Haptic Shared Control. In Proceedings of the International Conference on System, Man, and Cybernetics, Budapest, Hungary, 9–12 October 2016. [Google Scholar]
- de Waard, D.; van der Hulst, M.; Hoedemaeker, M.; Brookhuis, K.A. Driver behavior in an emergency situation in the Automated Highway System. Transp. Hum. Factors 1999, 1, 67–82. [Google Scholar] [CrossRef]
- De Winter, J.C.; Happee, R.; Martens, M.H.; Stanton, N.A. Effects of adaptive cruise control and highly automated driving on workload and situation awareness: A review of the empirical evidence. Transp. Res. Part F 2014, 27, 196–217. [Google Scholar] [CrossRef] [Green Version]
- Marcano, M.; Diaz, S.; Perez, J.; Irigoyen, E. A Review of Shared Control for Automated Vehicles: Theory and Applications. IEEE Trans. Hum. Mach. Syst. 2020, 50, 475–491. [Google Scholar] [CrossRef]
- Soualmi, B.; Sentouh, C.; Popieul, J.C.; Debernard, S. A shared control driving assistance system: Interest of using a driver model in both lane keeping and obstacle avoidance situations. IFAC Proc. Vol. 2013, 46, 173–178. [Google Scholar] [CrossRef]
- Soualmi, B.; Sentouh, C.; Popieul, J.C.; Debernard, S. Automation-driver cooperative driving in presence of undetected obstacles. Control Eng. Pract. 2014, 24, 106–119. [Google Scholar] [CrossRef]
- Bencloucif, A.M.; Nguyen, A.T.; Sentouh, C.; Popieul, J.C. Cooperative Trajectory Planning for Haptic Shared Control between Driver and Automation in Highway Driving. IEEE Trans. Ind. Electron. 2019, 66, 9846–9857. [Google Scholar] [CrossRef]
- Li, M.; Song, X.; Cao, H.; Wang, J.; Huang, Y.; Hu, C.; Wang, H. Shared Control with a Novel Dynamic Authority Allocation Strategy Based on Game theory and Driving Safety Field. Mech. Syst. Signal Process. 2019, 124, 199–216. [Google Scholar] [CrossRef]
- Liu, R.; Zhu, X.; Liu, L.; Wu, B.; Ma, Z.; Fei, Z.; He, J. Cooperative driving strategy based on naturalitic driving data and non-cooperative MPC. arXiv 2019, arXiv:1910.04323. [Google Scholar]
- Chouki, S.; Anh-Tu, N.; Amir, B.M.; Jean-Christophe, P. Driver-Automation Cooperation Oriented Approach for Shared Control of Lane Keeping Assist Systems. IEEE Trans. Control Syst. Technol. 2019, 27, 1962–1978. [Google Scholar]
- Li, M.; Cao, H.; Song, X.; Huang, Y.; Wang, J.; Huang, Z. Shared Control Driver Assistance System Based on Driving Intention and Situation Assessment. IEEE Trans. Ind. Inform. 2018, 14, 4982–4994. [Google Scholar] [CrossRef]
- Kondo, R.; Wada, T.; Sonoda, K. Use of Haptic Shared Control in Highly Automated Driving Systems. In Proceedings of the 14th IFAC Symposium on Analysis Design and Evaluation of Human Machine Systems, Tallinn, Estonia, 16–19 September 2019; pp. 43–48. [Google Scholar]
- Wang, Z.; Zheng, R.; Kaizuka, T.; Nakano, K. A Driver-Automation Shared Control for Forward Collision Avoidance While Automation Failure. In Proceedings of the 2018 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Shenyang, China, 24–27 August 2018. [Google Scholar]
- Ji, X.; Yang, K.; Na, X.; Lv, C.; Liu, Y. Shared Steering Torque Control for Lane Change Assistance: A Stochastic Game-Theoretic Approach. IEEE Trans. Ind. Electron. 2019, 66, 3093–3105. [Google Scholar] [CrossRef]
- Guo, C.; Sentouh, C.; Popieul, J.C.; Haue, J.B. MPC-based shared steering control for automated driving systems. In Proceedings of the 2017 IEEE International Conference on Systems, Man and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017. [Google Scholar]
- Abbink, D.A.; Mulder, M.; Boer, E.R. Haptic shared control: Smoothly shifting control authority? Cogn. Technol. Work 2012, 14, 19–28. [Google Scholar] [CrossRef] [Green Version]
- Abbink, D.A.; Cleij, D.; Mulder, M.; Paassen, M.M.V. The importance of including knowledge of neuromuscular behaviour in haptic shared control. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012. [Google Scholar]
- Iwano, K.; Raksincharoensak, P.; Nagai, M. A Study on Shared Control between the Driver and an Active Steering Control System in Emergency Obstacle Avoidance Situations. IFAC Proc. Vol. 2014, 47, 6338–6343. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Li, Y.; Li, S.E.; Burdet, E.; Cheng, B. Driver-automation indirect shared control of highly automated vehicles with intention-aware authority transition. In Proceedings of the Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Gray, A.; Ali, M.; Gao, Y.; Hedrick, J.; Borrelli, F. Semi-autonomous vehicle control for road departure and obstacle avoidance. In Proceedings of the 13th IFAC Symposium on Control in Transportation Systems, Sofia, Bulgaria, 12–14 September 2012. [Google Scholar]
- Anderson, S.J.; Karumanchi, S.B.; Iagnemma, K. Constraint-based planning and control for safe, semi-autonomous operation of vehicles. In Proceedings of the Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012. [Google Scholar]
- Li, R.; Li, Y.; Li, S.E.; Burdet, E.; Cheng, B. Indirect shared control of highly automated vehicles for cooperative driving between driver and automation. arXiv 2017, arXiv:1704.00866. [Google Scholar]
- Gray, A.; Ali, M.; Gao, Y.; Hedrick, J.K.; Borrelli, F. A Unified Approach to Threat Assessment and Control for Automotive Active Safety. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1490–1499. [Google Scholar] [CrossRef]
- Song, L.; Guo, H.; Wang, F.; Liu, J.; Chen, H. Model predictive control oriented shared steering control for intelligent vehicles. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017. [Google Scholar]
- Erlien, S.M.; Fujita, S.; Gerdes, J.C. Shared Steering Control Using Safe Envelopes for Obstacle Avoidance and Vehicle Stability. IEEE Trans. Intell. Transp. Syst. 2016, 17, 441–451. [Google Scholar] [CrossRef]
- Chen, S.; Chen, H.; Negrut, D. Implementation of MPC-Based Trajectory Tracking Considering Different Fidelity Vehicle Models. Automot. Innov. 2020, 3, 386–399. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H.P.; Huang, H.L. Shared Control of Highly Automated Vehicles Using Steer-By-Wire Systems. IEEE-CAA J. Autom. 2019, 6, 410–423. [Google Scholar] [CrossRef]
- Wei, S.; Zou, Y.; Zhang, X.; Zhang, T.; Li, X. An Integrated Longitudinal and Lateral Vehicle Following Control System With Radar and Vehicle-to-Vehicle Communication. IEEE Trans. Veh. Technol. 2019, 68, 1116–1127. [Google Scholar] [CrossRef]
- Bruschetta, M.; Maran, F.; Beghi, A. A fast implementation of MPC-based motion cueing algorithms for mid-size road vehicle motion simulators. Veh. Syst. Dyn. 2017, 55, 802–826. [Google Scholar] [CrossRef]
- Mammar, S.; Glaser, S.; Netto, M. Time to Line Crossing for Lane Departure Avoidance: A Theoretical Study and an Experimental Setting. IEEE Trans. Intell. Transp. Syst. 2006, 7, 226–241. [Google Scholar] [CrossRef] [Green Version]
- Brannstrom, M.; Coelingh, E.; Sjoberg, J. Model-Based Threat Assessment for Avoiding Arbitrary Vehicle Collisions. IEEE Trans. Intell. Transp. Syst. 2010, 11, 658–669. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Liu, W.; Yu, Z. Automated Vehicle Attitude and Lateral Velocity Estimation Using a 6-D IMU Aided by Vehicle Dynamics. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018. [Google Scholar]
- Cheng, Z.P.; Yong, W.B.; Guo, W.Z.; You, W.X.; Xiang, L.I. Study on Lane Change Decision Aid Systems Test Based on ISO17387. Auto Sci. Tech. 2018, 2, 51–55. [Google Scholar]
- Wang, J.; Wu, J.; Zheng, X.; Ni, D.; Li, K. Driving safety field theory modeling and its application in pre-collision warning system. Transp. Res. Part C Emerg. Technol. 2016, 72, 306–324. [Google Scholar] [CrossRef]
- Guo, L.; Ge, P.; Xia, W.; Qin, Z. Lane-keeping Control Systems Based on Human-machine Cooperative Driving. China J. Highw. Transp. 2019, 32, 46–57. (In English) [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Vehicle mass | |
| Vehicle inertia | |
| Distance from front/rear axle to center of mass | |
| Cornering stiffness of front/rear tires | |
| Lateral stiffness of front/rear tires | |
| Slip angle of front/rear tires | |
| Longitudinal slip ratio of front/rear tires | |
| Lateral force of front/rear tires | |
| Longitudinal force of front/rear tires | |
| Front wheel steering angle | |
| Vehicle longitudinal velocity | |
| Vehicle lateral velocity | |
| Lateral acceleration | |
| Vehicle heading angle | |
| Yaw rate | |
| Vehicle longitudinal position in inertial coordinate | |
| Lateral position of vehicle in inertial coordinate |
| Symbol | Value |
|---|---|
| 1723 kg | |
| 4175 kg·m2 | |
| 1.232 m | |
| 1.468 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Y.; Yin, Z.; Nie, L. Shared Steering Control for Lane Keeping and Obstacle Avoidance Based on Multi-Objective MPC. Sensors 2021, 21, 4671. https://doi.org/10.3390/s21144671
Liang Y, Yin Z, Nie L. Shared Steering Control for Lane Keeping and Obstacle Avoidance Based on Multi-Objective MPC. Sensors. 2021; 21(14):4671. https://doi.org/10.3390/s21144671
Chicago/Turabian StyleLiang, Yang, Zhishuai Yin, and Linzhen Nie. 2021. "Shared Steering Control for Lane Keeping and Obstacle Avoidance Based on Multi-Objective MPC" Sensors 21, no. 14: 4671. https://doi.org/10.3390/s21144671
APA StyleLiang, Y., Yin, Z., & Nie, L. (2021). Shared Steering Control for Lane Keeping and Obstacle Avoidance Based on Multi-Objective MPC. Sensors, 21(14), 4671. https://doi.org/10.3390/s21144671