Parametric Study of Bolt Clamping Effect on Resonance Characteristics of Langevin Transducers with Lumped Circuit Models


Abstract
1. Introduction
2. Materials and Methods
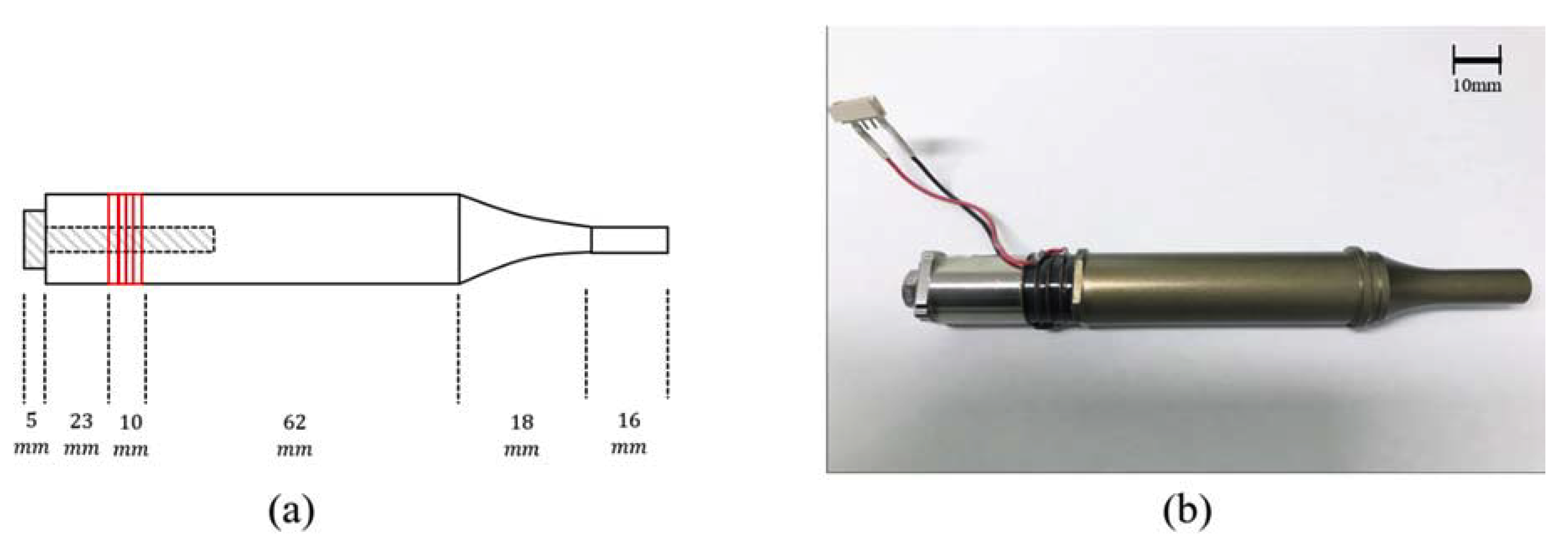
2.1. Structure of Langevin Transducers
2.2. Metal Bolt vs. Electromechanical Coupling Coefficient
2.3. Equivalent Circuit Model
2.4. Fabrication of Langevin Transducers
3. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Parrini, L. Design of advanced ultrasonic transducers for welding devices. IEEE Trans. Ultrason. Ferrelectr. Freq. Control. 2001, 48, 1632–1639. [Google Scholar] [CrossRef]
- Lais, H.; Lowe, P.S.; Gan, T.H.; Wrobel, L.C. Numerical investigation of design parameters for optimization of the in-situ ultrasonic fouling removal technique for pipelines. Ultrason. Sonochem. 2019, 56, 94–104. [Google Scholar] [CrossRef] [PubMed]
- Bani, D.; Quattrini, A.; Freschi, G.; Lo Ruso, G. Histological and Ultrastructural Effects of Ultrasound-induced Cavitation on Human Skin Adipose Tissue. Plast. Reconstr. Surg. Glob. Open 2013, 1, e41. [Google Scholar] [CrossRef] [PubMed]
- Abdullah, A.; Shahini, M.; Pak, A. An approach to design a high power piezoelectric ultrasonic transducer. J. Electroceram. 2009, 22, 369–382. [Google Scholar] [CrossRef]
- Al-Budairi, H.; Lucas, M.; Harkness, P. A design approach for longitudinal-torsional ultrasonic transducers. Sens. Actuators A Phys. 2013, 198, 99–106. [Google Scholar] [CrossRef]
- Lin, J.; Lin, S.; Xu, J. Analysis and experimental validation of longitudinally composite ultrasonic transducers. J. Acoust. Soc. Am. 2019, 145, 263–271. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Theoretical Resonance Analysis of Langevin Transducers with Equivalent Circuit Models for Therapeutic Ultrasound. J. Electr. Eng. Technol. 2019, 14, 2437–2445. [Google Scholar] [CrossRef]
- Sohn, C.H.; Park, J.H. A comparative study on acoustic damping induced by half-wave, quarter-wave, and Helmholtz resonators. Aerosp. Sci. Technol. 2011, 15, 606–614. [Google Scholar] [CrossRef]
- Yang, G.; Liu, S.F.; Ren, W.; Mukherjee, B.K. Effects of uniaxial stress on the piezoelectric, dielectric, and mechanical properties of lead zirconate titanate piezoceramics. Ferroelectrics 2001, 262, 207–212. [Google Scholar] [CrossRef]
- Choi, C.H.; Seo, I.T.; Song, D.; Jang, M.S.; Kim, B.Y.; Nahm, S.; Sung, T.H.; Song, H.C. Relation between piezoelectric properties of ceramics and output power density of energy harvester. J. Eur. Ceram. Soc. 2013, 33, 1343–1347. [Google Scholar] [CrossRef]
- Liu, X.; Paurobally, R.; Pan, J. The effect of prestress on vibration behavior of structures in impedance method damage detection. Adv. Mater. Res. 2008, 41–42, 401–406. [Google Scholar] [CrossRef]
- DeAngelis, D.A.; Schulze, G.W.; Wong, K.S. Optimizing Piezoelectric Stack Preload Bolts in Ultrasonic Transducers. Phys. Procedia 2015, 63, 11–20. [Google Scholar] [CrossRef]
- Sherrit, S.; Leary, S.P.; Dolgin, B.P.; Bar-Cohen, Y. Comparison of the Mason and KLM Equivalent Circuits for Piezoelectric Resonators in the Thickness Mode. In Proceedings of the 1999 IEEE Ultrasonics Symposium, Proceedings, International Symposium, Caesars Tahoe, NV, USA, 17–20 October 1999; Volume 2, pp. 921–926. [Google Scholar] [CrossRef]
- Wei, X.; Yang, Y.; Yao, W.; Zhang, L. PSpice modeling of a sandwich piezoelectric ceramic ultrasonic transducer in longitudinal vibration. Sensors 2017, 17, 2253. [Google Scholar] [CrossRef] [PubMed]
- Rathod, V.T. A review of electric impedance matching techniques for piezoelectric sensors, actuators and transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, H.; Liang, C.; Tian, Y.; Zhao, X.; Zhang, D. Design of High-Frequency Ultrasonic Transducers with Flexure Decoupling Flanges for Thermosonic Bonding. IEEE Trans. Ind. Electron. 2016, 63, 2304–2312. [Google Scholar] [CrossRef]
- Lin, S.; Xu, C. Analysis of the sandwich ultrasonic transducer with two sets of piezoelectric elements. Smart Mater. Struct. 2008, 17, 065008. [Google Scholar] [CrossRef]
- Meng, X.; Lin, S. Analysis of a cascaded piezoelectric ultrasonic transducer with three sets of piezoelectric ceramic stacks. Sensors 2019, 19, 580. [Google Scholar] [CrossRef]
- Lin, J.; Lin, S. Study on a Large-Scale Three-Dimensional Ultrasonic Plastic Welding Vibration System Based on a Quasi-Periodic Phononic Crystal Structure. Crystals 2020, 10, 21. [Google Scholar] [CrossRef]
- Fuji Ceramics Corporation. Available online: http://www.fujicera.co.jp/managed/wp-content/themes/fujicera/digitalbook/en/element/index_h5.html#1 (accessed on 19 December 2019).
- GE Sensing. Available online: http://www.instrumart.com/assests/ge-sound-speeds-and-pipe-size-data.pdf (accessed on 19 December 2019).
- Advanced UT. Available online: http://www.advanced-ndt.co.uk/index_htm_files/Reference%20Chart%20-%20Velocity%20Chart.pdf (accessed on 19 December 2019).
- Chen, J.S.; Sun, C.T. Reducing vibration of sandwich structures using antiresonance frequencies. Compos. Struct. 2012, 94, 2819–2826. [Google Scholar] [CrossRef]
- Kanda, K.; Saito, T.; Iga, Y.; Higuchi, K.; Maenaka, K. Influence of parasitic capacitance on output voltage for series-connected thin-film piezoelectric devices. Sensors 2012, 12, 16673–16684. [Google Scholar] [CrossRef]
- Dai, Z.; Xu, Z.; Yao, X. Effect of dc bias on pressure-induced depolarization of Pb (Nb, Zr, Sn, Ti) O3 ceramics. Appl. Phys. Lett. 2008, 92, 72904. [Google Scholar] [CrossRef]
- Guyomar, D.; Ducharne, B.; Sebald, G. High nonlinearities in Langevin transducer: A comprehensive model. Ultrasonics 2011, 51, 1006–1013. [Google Scholar] [CrossRef] [PubMed]
- Umeda, M.; Nakamura, K.; Ueha, S. Effects of vibration stress and temperature on the characteristics of piezoelectric ceramics under high vibration amplitude levels measured by electrical transient responses. Jpn. J. Appl. Phys. 1999, 38, 5581–5585. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Material | Sound Speed (m/s) | Density (kg/m3) | Acoustic Impedance (Mrayls) | Outer Diameter (mm) | Inner Diameter (mm) |
|---|---|---|---|---|---|---|
| Metal bolt | Stainless steel [20] | 5920 | 8000 | 47 | 20 | |
| Back mass | Stainless steel | 5920 | 8000 | 47 | 20 | 6.5 |
| Piezoceramics | Hard ceramic [21] | 2791 | 7700 | 21 | 20 | 6.5 |
| Front mass | Aluminum [22] | 6375 | 2700 | 17 | 20 | 6.5 |
| Horn | Aluminum | 6375 | 2700 | 17 | 20 |
| 6.0 N∙m | 6.5 N∙m | 7.0 N∙m | 7.5 N∙m | 8.0 N∙m | 8.5 N∙m | 9.0 N∙m | 9.5 N∙m | 10.0 N∙m | |
|---|---|---|---|---|---|---|---|---|---|
| fr (kHz) | 37.96 | 38.05 | 38.13 | 38.22 | 38.30 | 38.38 | 38.46 | 38.56 | 38.64 |
| fa (kHz) | 39.15 | 39.24 | 39.30 | 39.39 | 39.47 | 39.55 | 39.62 | 39.70 | 39.78 |
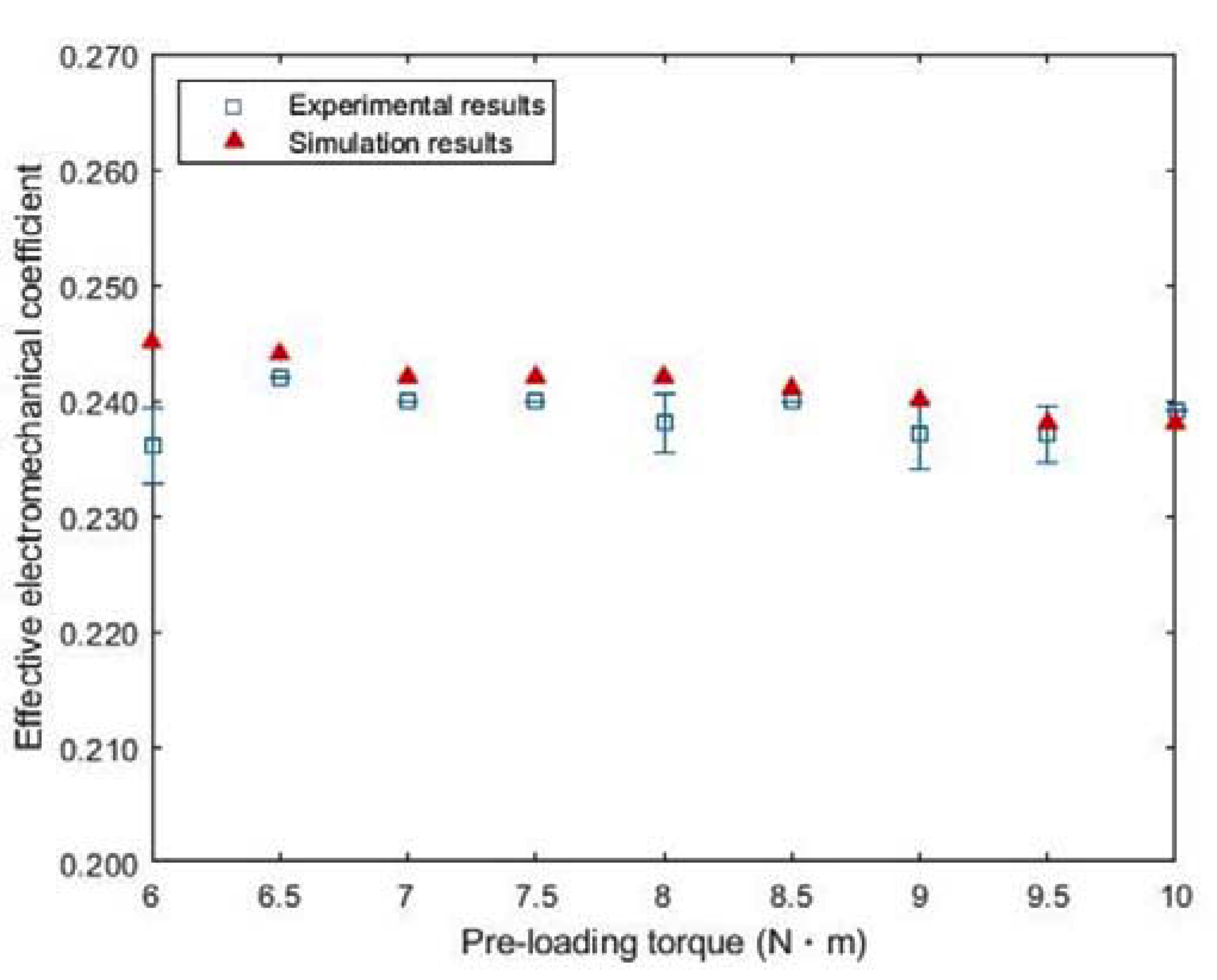
| keff | 0.245 | 0.244 | 0.242 | 0.242 | 0.242 | 0.241 | 0.240 | 0.238 | 0.238 |
| 6.0 N∙m | 6.5 N∙m | 7.0 N∙m | 7.5 N∙m | 8.0 N∙m | 8.5 N∙m | 9.0 N∙m | 9.5 N∙m | 10.0 N∙m | |
|---|---|---|---|---|---|---|---|---|---|
| fr (kHz) | 37.71 | 38.07 | 38.17 | 38.22 | 38.32 | 38.37 | 38.57 | 38.57 | 38.62 |
| fa (kHz) | 38.83 | 39.17 | 39.32 | 39.37 | 39.42 | 39.52 | 39.67 | 39.72 | 39.77 |
| *keff | 0.236 (0.003) | 0.242 (0) | 0.240 (0) | 0.240 (0) | 0.238 (0.002) | 0.240 (0) | 0.237 (0.003) | 0.237 (0.002) | 0.239 (0) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Lee, J. Parametric Study of Bolt Clamping Effect on Resonance Characteristics of Langevin Transducers with Lumped Circuit Models. Sensors 2020, 20, 1952. https://doi.org/10.3390/s20071952
Kim J, Lee J. Parametric Study of Bolt Clamping Effect on Resonance Characteristics of Langevin Transducers with Lumped Circuit Models. Sensors. 2020; 20(7):1952. https://doi.org/10.3390/s20071952
Chicago/Turabian StyleKim, Jinhyuk, and Jungwoo Lee. 2020. "Parametric Study of Bolt Clamping Effect on Resonance Characteristics of Langevin Transducers with Lumped Circuit Models" Sensors 20, no. 7: 1952. https://doi.org/10.3390/s20071952
APA StyleKim, J., & Lee, J. (2020). Parametric Study of Bolt Clamping Effect on Resonance Characteristics of Langevin Transducers with Lumped Circuit Models. Sensors, 20(7), 1952. https://doi.org/10.3390/s20071952