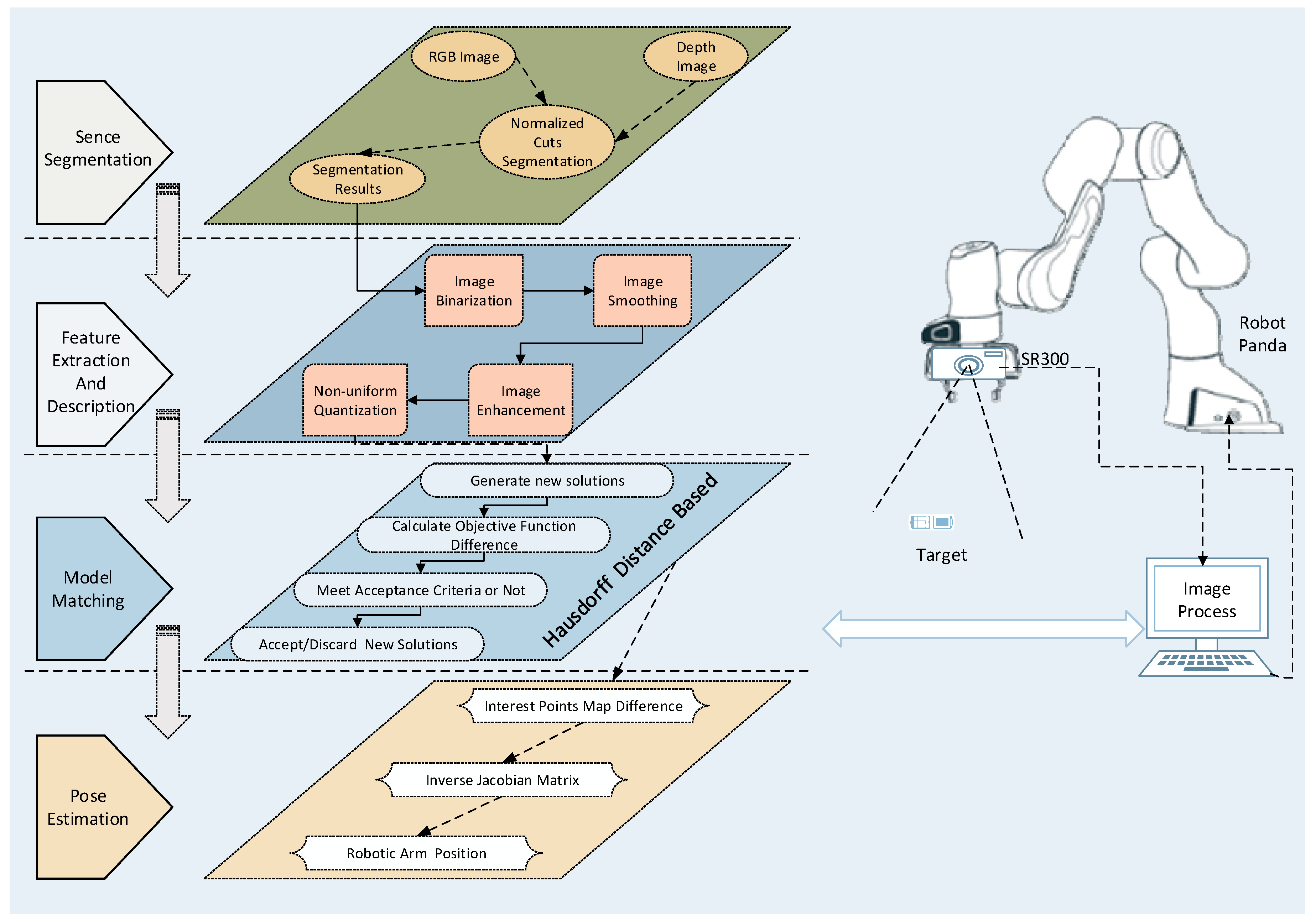
This section describes the processing steps of the proposed RGB-D sensor-based 3D object recognition and matching module that is mainly composed of five unit modules: Scene segmentation, feature extraction and description, 3D model matching, pose estimation, and control law of visual servoing. After acquiring and binarizing the color image, the scene segmentation unit is responsible for removing the background point from binarization image. Then, the feature description unit is used to construct the feature descriptor of all foreground objects in the scene. Lastly, the descriptor matches the fused depth ranging unit information, completes the 3D reconstruction of current target object, and matches target pose.
3.1. Scene Segmentation
Scene segmentation is the primary task of target detection and recognition. The purpose of this task is to separate the foreground target and the planar background area of the scene in order to simplify or change the representation of scene, make the understanding and the recognition of the scene easier, and improve the computational efficiency in the subsequent feature extraction and description process. It has a wide range of applications in scene recognition, positioning, and even mapping of industrial robots [
14,
15]. In recent years, a large number of methods have been proposed for image segmentation through images, such as graph theory-based methods [
16], clustering algorithm-based methods [
17], digital image watermarking [
15], and watershed transformations [
18]. However, these methods are not ideal for segmenting the objects with similar colors or having the same color as the background in the scene. The reason for this is that the depth of field information is lost when the 3D scene is projected onto the 2D planar, so the information obtained from the single image is insufficient.
In this paper, considering the requirements of visual servoing system for estimating image depth information, the working environment of industrial scene camera is restored to the maximum extent, and the camera depth module is adopted to obtain the depth information of target image in the scene.
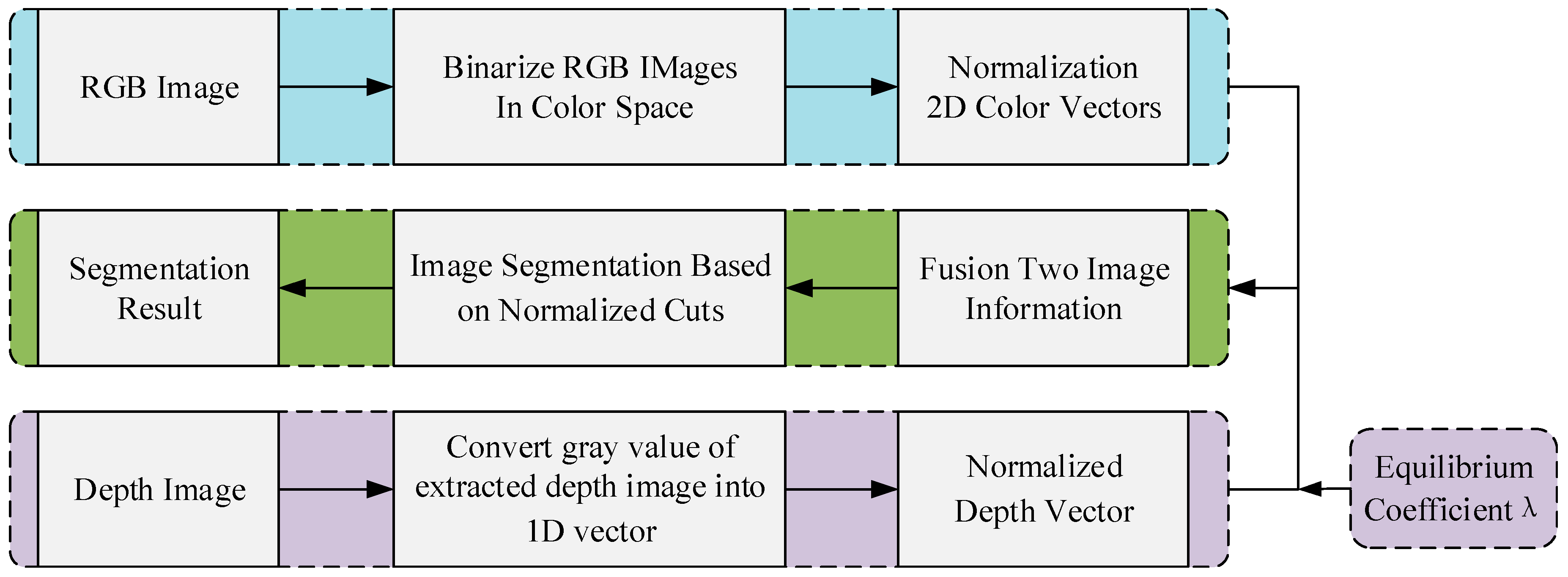
The proposed scene segmentation algorithm is shown in
Figure 2. Suppose a general scene
S is composed of
n points
characterized by color and depth information. First, the color and the depth information need to be unified in an efficient way. In addition, a uniform color space will make the distances in each color component comparable, thus simplifying the clustering process of 3D vectors related to the color information. In this paper, RGB space is selected as the expression space of the color information, that is, the color information of each scene point
is represented by a 3D vector as:
Since the gray value of depth map is proportional to the distance of actual object from the depth camera, the depth information can be simply represented by the gray value of each point
in depth map. As the depth map is used in this paper, depth information is represented by the vector shown in Equation (2):
As the scene acquisition system provides the relative distance of the scene depth instead of absolute distance, so the ideal scene segmentation algorithm should be insensitive to the relative scaling of depth information described by point cloud or depth map. In order to ensure that the segmentation algorithm is independent of depth image scaling, the depth vector needs to be normalized by the standard deviation of the scene point depth data. Additionally, final depth description is a vector as shown in Equation (3):
represents the normalized depth vector, is a key parameter in visual servo jacobian matrix estimation, the derivation of this parameter is visible in [
19]. In order to balance the correlation of the two types of information (color and depth) in the merging process, the color information vector in Equation (1) is normalized by the standard deviation average of the three components
R,
G, and
B corresponding to color information. In addition, final color information is described as:
From the above normalized depth and color information vectors, representation of each scene point can be obtained as:
where
λ is a parameter that balances the color and the depth information, in the experiment part, for best results and based on the experience we adopt
. This paper only describes the scene briefly due to space limitation. The detail description of the normalized cuts algorithm based on original image segmentation obtained by the RGB-D sensor is available in [
20].
Figure 3 shows the image segmentation results for the same scene obtained using different algorithms. Where a is the original image,
Figure 3b–3f are the image processing results of traditional segmentation algorithms.
Figure 4a,b is the binarized images obtained using the conventional algorithm and the clustering algorithm in this paper, respectively. By comparing the segmentation results under the algorithms of
Figure 3 and
Figure 4, it can be seen that the binarization algorithm based on normalized cuts can separate the target object from other objects using the clustering method, and can effectively reduce the interference noise around the target object. After completing the segmentation based on normalized cuts, the feature values of the target object are extracted, and the grayscale image is restored when the target feature value is unchanged, and the target recognition is performed on this basis.
3.2. Feature Extraction and Description
After completing the image segmentation task, the information of the image needs to be further processed: Such as image denoising, color correction, signal to noise ratio improvement, smoothing, sharpening, positioning, and separation. Restore or reconstruct the degraded images, improve the image fidelity, and provide clear images for viewers. In terms of image processing content, two problems must be solved: First one is to determine whether there is information needed in the image, and another one is to determine the information required to further extract and identify the image features. Based on the characteristics of binarized images shown in
Figure 1, the processing flow is employed in
Figure 5.
Image enhancement module is followed.
Image enhancement refers to the processing of highlighting certain information in an image according to specific requirements, while reducing or removing some unnecessary information. The purpose is to improve the image quality and enhance the recognition ability of certain information in the image for analysis and use [
7]. Currently, several methods are available for image enhancement, which can be divided into two major categories: Spatial domain methods and frequency domain methods. The steps of the image enhancement algorithm used in this paper are as follows:
First, a histogram of the target image is constructed.
Histogram is a statistical graph for expressing the gray scale distribution of an image. It consists of where the abscissa is the gray value
and the ordinate is the gray value probability density
.
Then, the image histogram is equalized.
Let the total number of pixels of the original image be
, with
gray levels, and frequency of
gray level
is
, if the original image of pixel gradation at point
is
, the gradation of the histogram equalized image at point
is:
The gray value after histogram equalization is inversely transformed into the original image, and the gray value of each pixel point is reset to reconstruct the final binarized image.
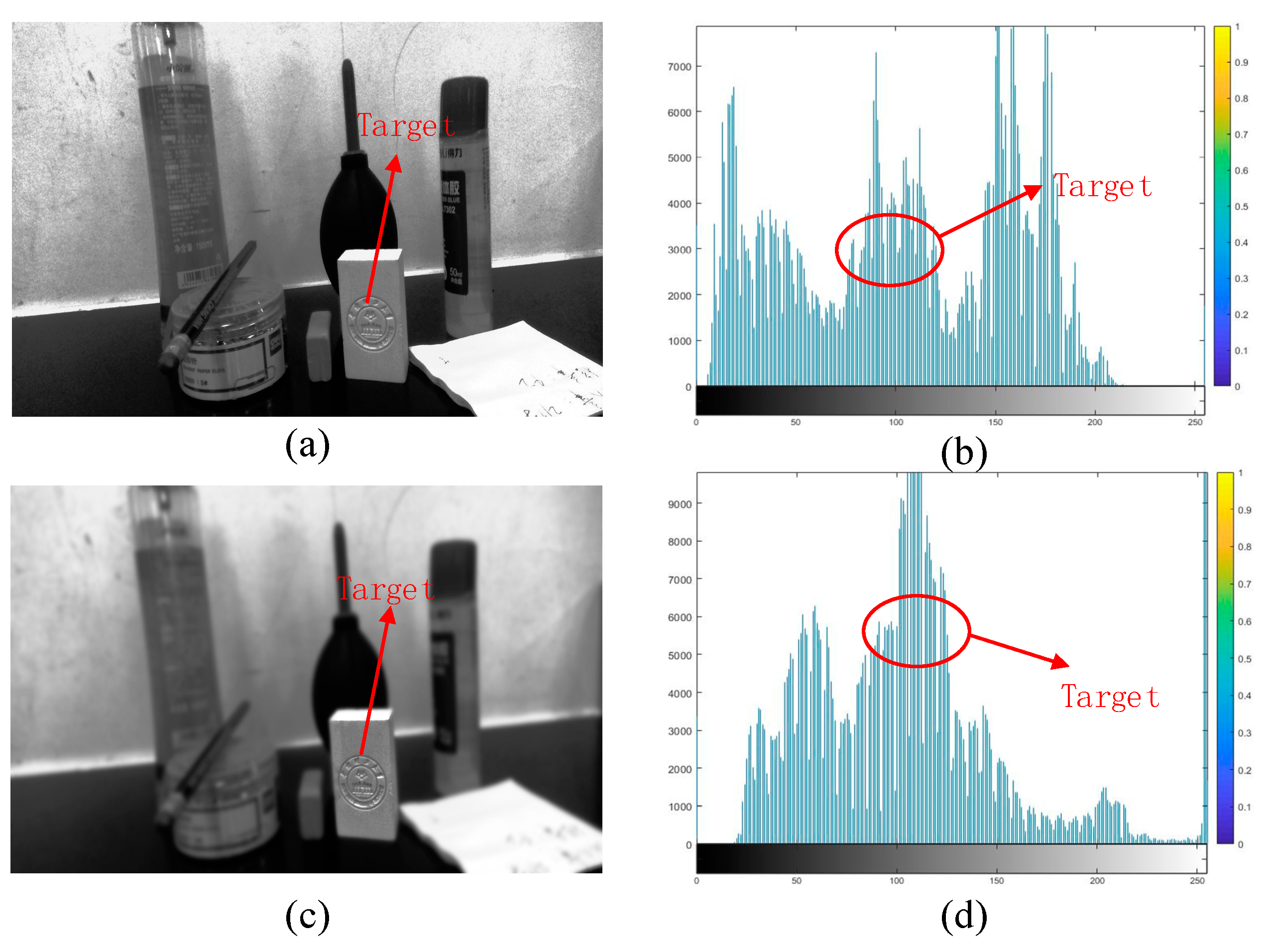
Image processing results are as shown in
Figure 6, where (a) is the original gray scale image and its histogram, while (b) is the image after equalizing the target image and its histogram. It can be seen from the figure that equalized histogram effectively highlights the target image information in the environment, and at the same time reduces the unnecessary image information around the periphery, which improves the target image quality and enhances the ability of recognizing the interest points in the image.
3.3. Model Matching
After extracting the interest image based on the image algorithm of RGB-D camera, a description matching process needs to be performed in order to find the 3D correspondence between the detected model object and the recorded model. The way to realize the precise positioning of moving objects with known 3D models using the monocular gray image is an important issue in the field of machine vision and a primary task of visual detection and target tracking based on 3D model. The key to its positioning lies in establishing a correspondence relationship between the target image and the model [
21].
The Hausdorff distance can be used to measure the degree of matching between two sets of points. Since it does not need to establish an exact point-to-point correspondence between the model and the image, it is more fault tolerant than other matching methods [
22]. In this section, the simple and feasible boundary extraction is used to filter out the influence of noise points from the boundary on the model matching by MHD (modified Hausdorff distance) algorithm. At the same time, in order to avoid looking for visible point in image and model projection pixel points, the displacement and the rotation of the model are directly defined in 3D space, and a global matching optimization function between target image and 3D model planar projection is established with the coordinate transformation and the Hausdorff distance. Finally, simulated annealing algorithm is used to obtain the optimal solution of the pose to improve the accuracy of matching.
The derivation process of matching optimization function based on Hausdorff distance is described below. The establishment of model and solution of matching parameters can be found in [
21]. Let
be the boundary contour point set extracted from the target interest point,
be the line segment collection for wireframe models, and
is the transformation matrix from model coordinates to image coordinates. The shape matching based on Hausdorff distance can be expressed as:
where
is the projection of
in the image coordinate system,
, following is the simple derivation:
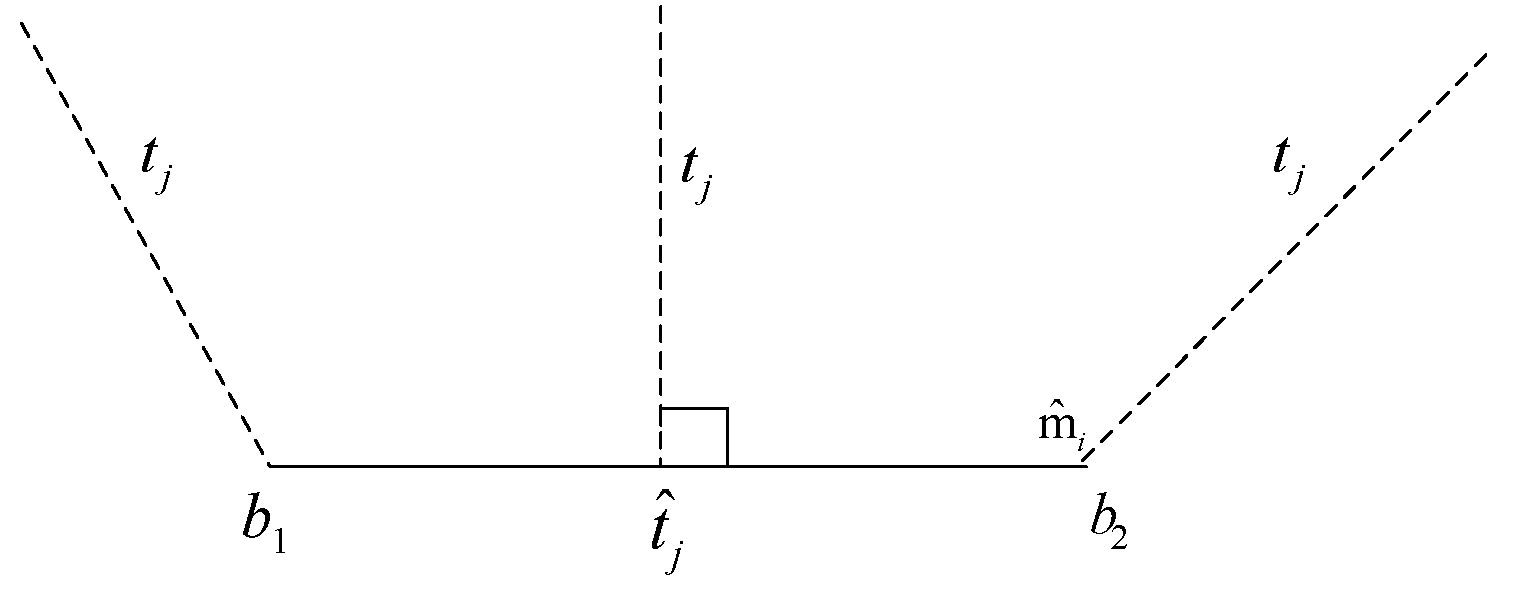
In the above formula,
is defined as the distance from point
to line segment
. Given point
and line segment
(determined by endpoints
and
), then
The figure above is a visual representation of formula (11), shows the distance from point
to line
under different conditions. As shown above from Equations (9)–(11), the objective function formula (9) is a continuous nondifferentiable multivariable function and there are multiple local minimum points in search space, it should be noted that in the actual calculation process, some parameters involved in the formula can be given according to the situation to reduce unnecessary complicated operations. In this paper, the simulated optimal annealing algorithm is used to obtain the global optimal solution of the objective function the algorithm is simple, versatile, robust, and suitable for parallel processing. The calculation process is a series of iterative processes, as shown in
Figure 8.
In order to avoid duplication of content, matching results of the model are presented in the experiment section.
3.4. Pose Estimation
In the visual servoing system of this paper, RGB-D camera or planar camera is fixed at the end of the robot arm. After capturing the current image, it then needs to be matched with the target image. The angle and the speed of the robot arm are obtained by inverse kinematics, which requires a composite Jacobian matrix that correlates the speed of the robot and the image change. Inspired by the registration of point cloud images [
23], this section uses the RANSAC (random sample consensus) algorithm to provide an initial transformation matrix for RGB-D image fine registration. The RANSAC is an iterative algorithm for estimating the parameters of mathematical models, which are used to determine the corresponding points that satisfy a particular mathematical model, and obtain the initial transformation matrix accordingly. After applying the initial transformation matrix to RGB-D images, the LM-ICP is applied to the transformed RGB-D images and scenes, which is an improved version of the ICP algorithm. A common optimization algorithm for nonlinear optimization of objective functions is the least squares optimization algorithm. The final solution can be obtained using the SVD algorithm [
24]. However, all norm optimization problems are sensitive to discrete points due to square of residuals. Therefore, the Huber loss function is used as a cost function for the corresponding point set:
where
is the distance between the corresponding points and
is the distance threshold, the Huber loss function is smooth and differentiable here. Similar to the objective function of point cloud registration, the expression is:
Get the optimal
by the LM-ICP algorithm [
25], if
and
are the three rotation angle translation components of the coordinate axis, respectively, the end of the 6 DOF manipulator can be expressed as
, and the optimal transformation matrix can be expressed as:
As mentioned above, are the rotation angles of the three axes. Calibration of the hand-eye relationship between the camera and the robot are needed before experiment.
3.5. Control Law of Visual Servoing
The aim of all vision-based control schemes is to minimize an error
, which is typically defined by
This control law comes from [
19], the parameters in Equation (18) are defined as follows: The vector
, is a set of image measurements (e.g., the image coordinates of interest points or the image coordinates of the center of an object). These image measurements are used to compute a vector of
visual features,
, in which
is a set of parameters that represent potential additional knowledge about the system (e.g., coarse camera intrinsic parameters or 3D models of objects). The vector
contains the desired values of the features is constant, and changes in
depend only on camera motion. Further, we consider here the case of controlling the motion of a camera with six degrees of freedom (6 DOF); e.g., a camera attached to the end effector of a six degree-of-freedom arm.
In this paper, we describe a position-based visual servo control (PBVS), which consists of a set of 3D parameters, which must be estimated from image measurements.
Once
is selected, the design of the control scheme can be quite simple. Then, we need to design a velocity controller, to solve this problem, we should know the relationship between the time variation of
and the camera velocity. Let the spatial velocity of the camera be denoted by
, with
the instantaneous linear velocity of the origin of the camera frame and
the instantaneous angular velocity of the camera frame. The relationship between
and
is given by:
in which
∈
is named the interaction matrix related to
. The term feature Jacobian is also used somewhat interchangeably in the visual servo literature.
Using (18) and (19), we can get the relationship between camera velocity and the time variation of the error:
where
. Considering
as the input to the robot controller, and if we would like, for instance, to try to ensure an exponential decoupled decrease of the error (i.e.,
), we obtain using (20):
where
∈
is chosen as the Moore-Penrose pseudoinverse of
.
In the next experiment part, the computed velocity of image Jacobian is .



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













