Average Consensus over Mobile Wireless Sensor Networks: Weight Matrix Guaranteeing Convergence without Reconfiguration of Edge Weights



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
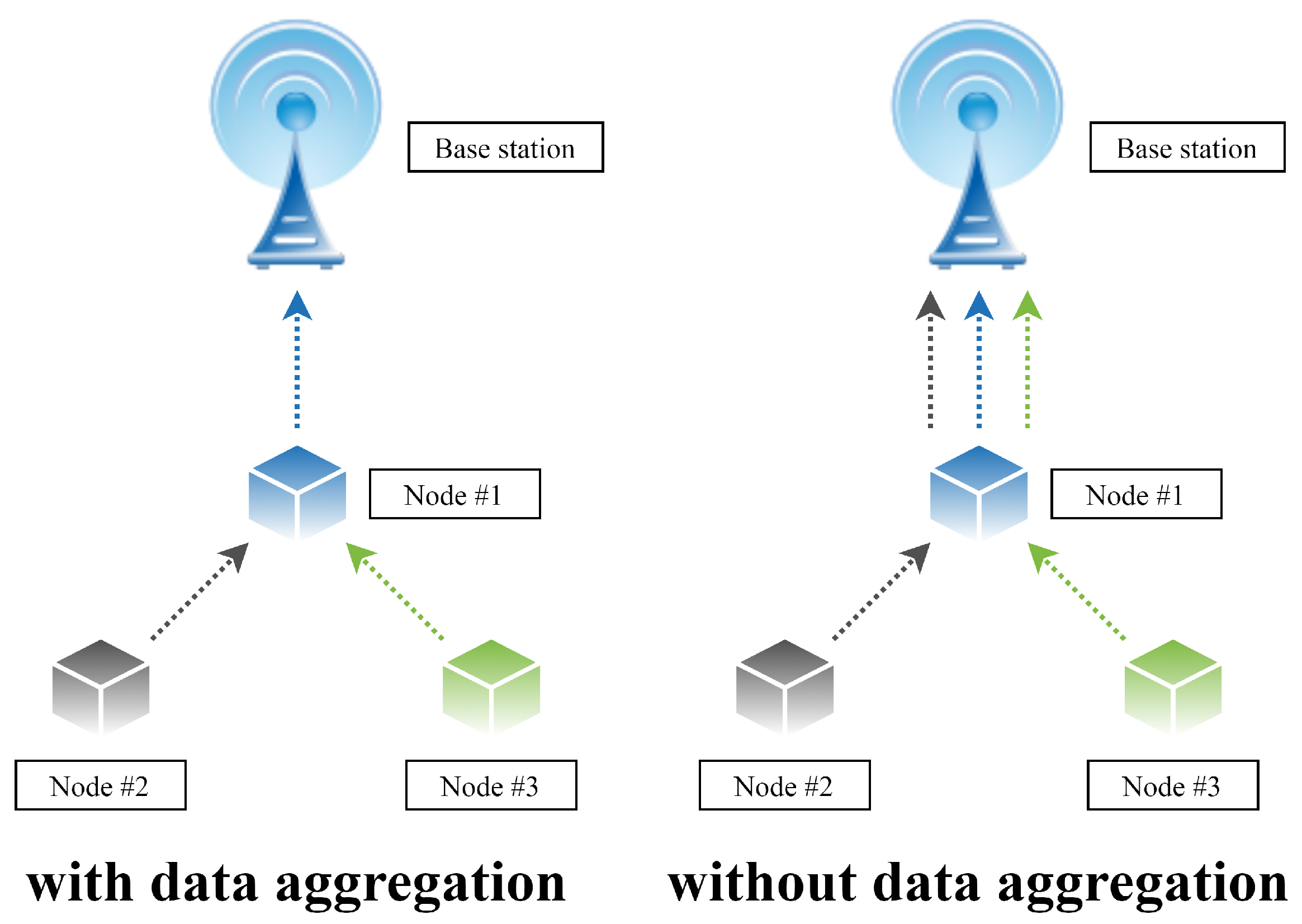
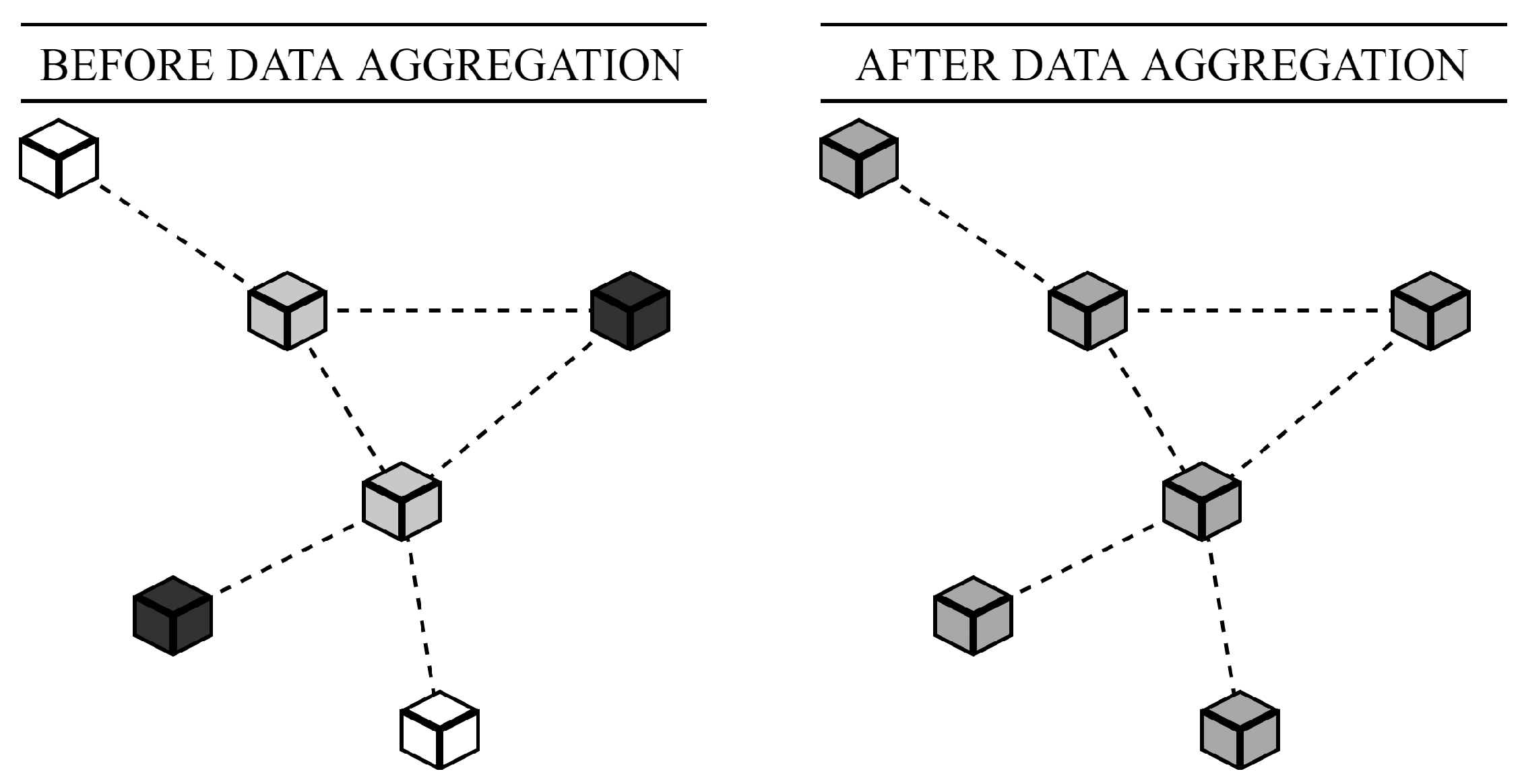
1.1. Theothical Insight into Data Aggregation
- ▪
- Centralized data aggregation
- ▪
- Distributed data aggregation
1.2. Consensus Theory
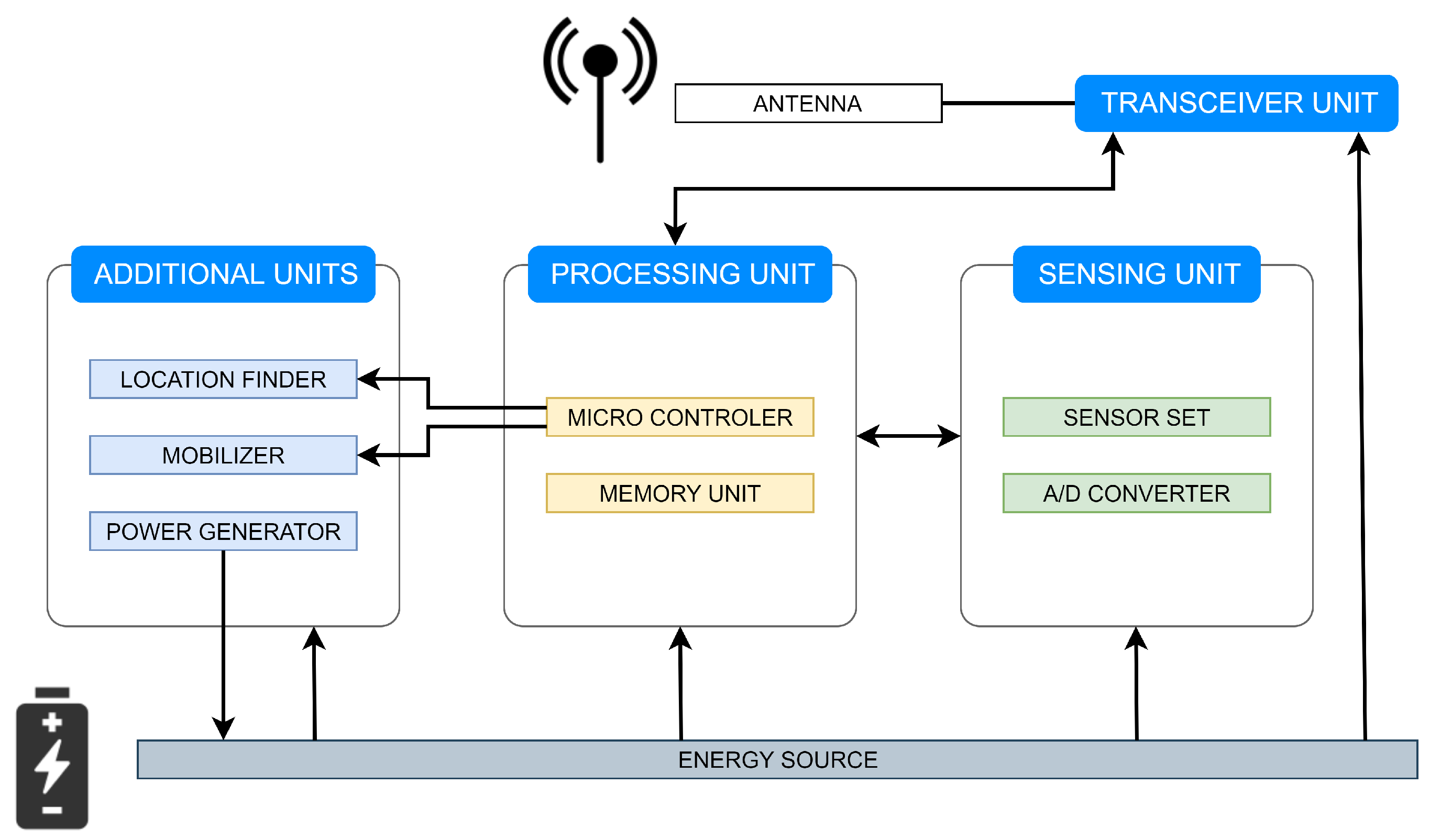
1.3. Mobile Wireless Sensor Networks
1.4. Our Contribution
1.5. Paper Organization
2. Related work
- ▪
- Section 2.1: Contributions addressing a positive impact of mobility on performance
- ▪
- Section 2.2: Contributions addressing the convergence achievement in disconnected topologies
- ▪
- Section 2.3: Other contributions
2.1. Contributions Addressing a Positive Impact of Mobility on Performance
2.2. Contributions Addressing the Convergence Achievement in Disconnected Topologies
2.3. Other Contributions
3. Problem Formulation: Average Consensus over Mobile Wireless Sensor Networks
3.1. Mathematical Model of Mobile Wireless Sensor Networks
3.2. Average Consensus over Mobile Systems
4. Design of Weight Matrix Simplifying Average Consensus Algorithm over Mobile Wireless Sensor Networks
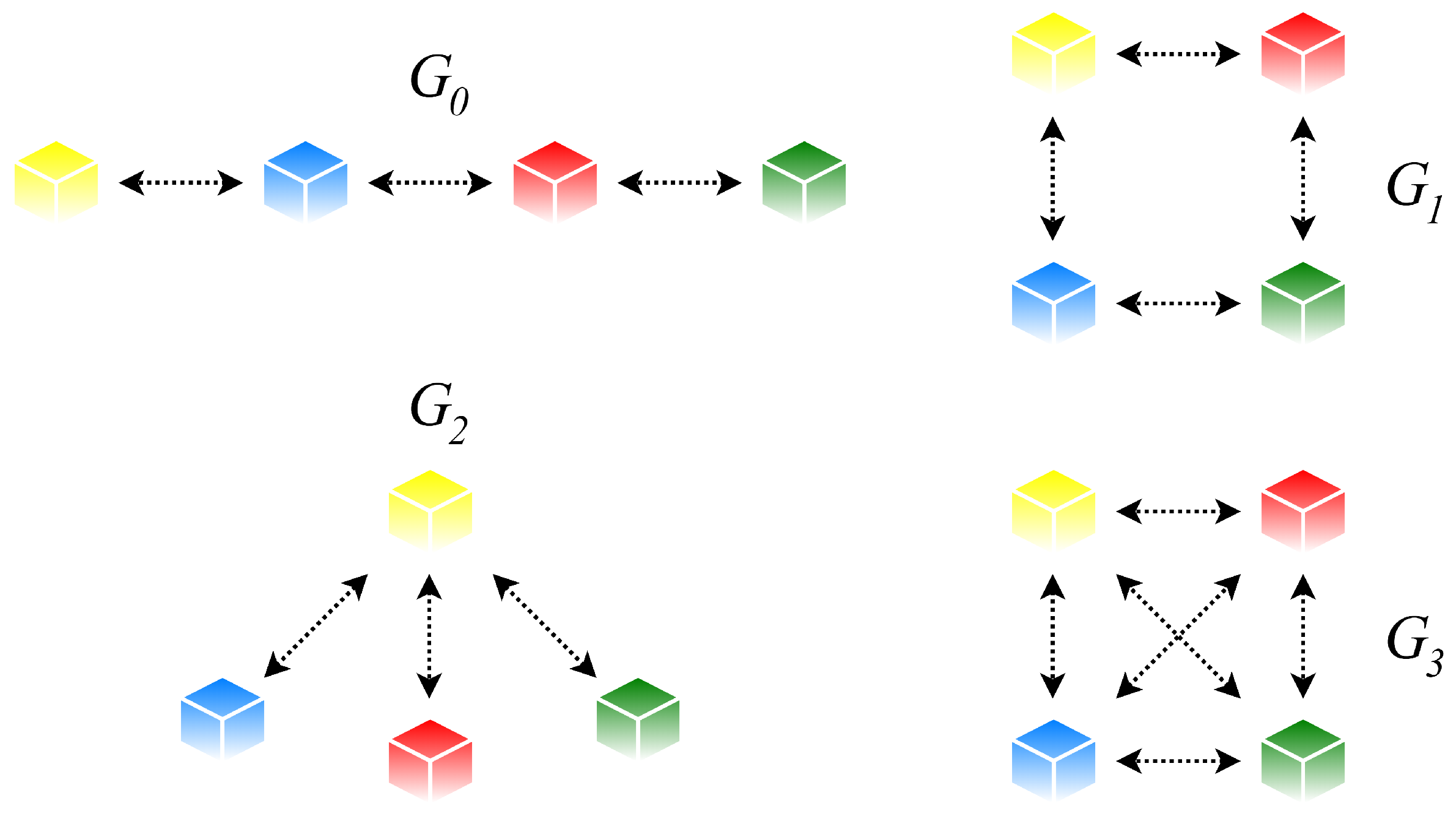
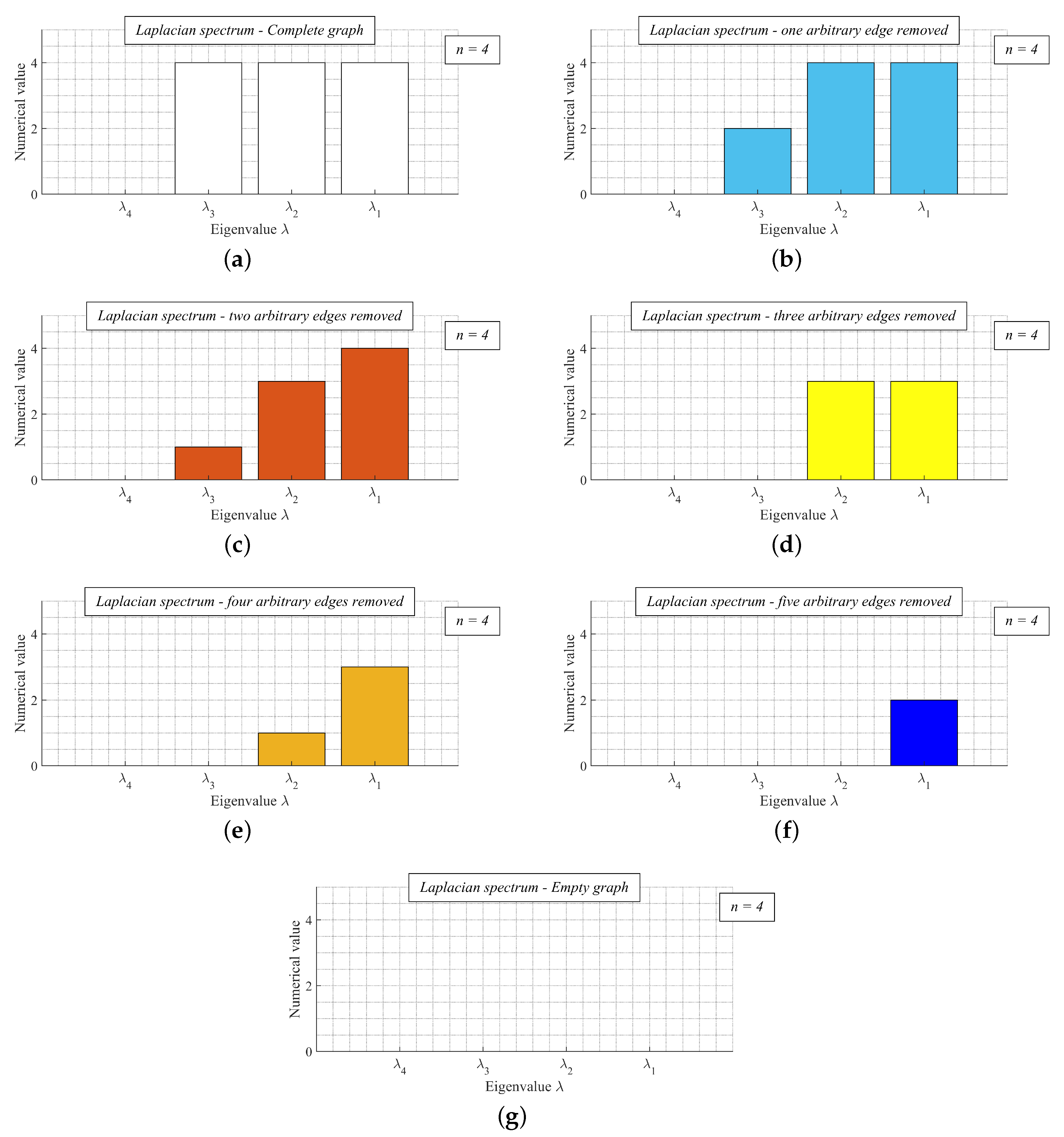
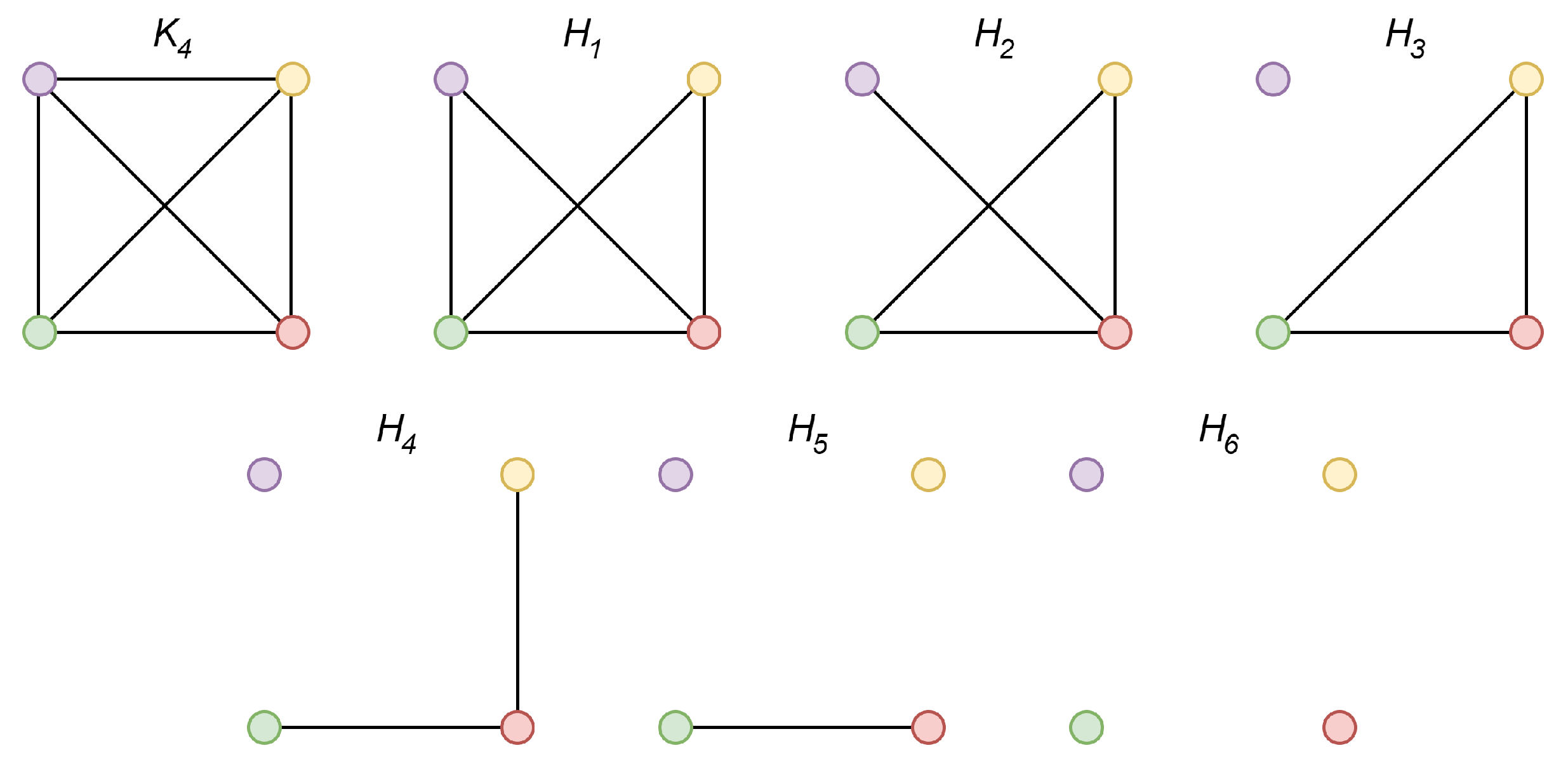
4.1. Laplacian Spectrum of Complete Finite Graphs and Their Spanning Subgraphs
4.2. Weight Matrix Guaranteeing Convergence over Mobile Wireless Sensor Networks without Reconfiguration of Edge Weights
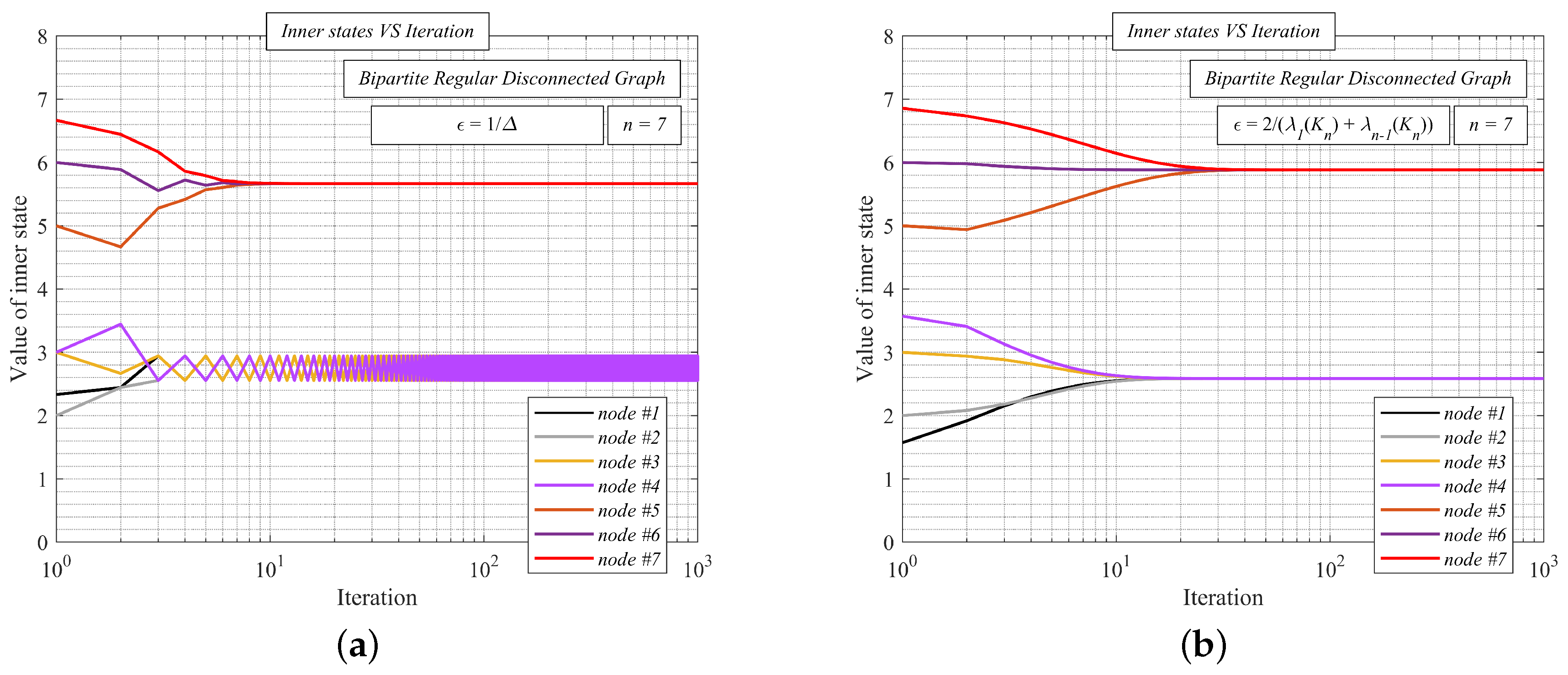
4.3. Convergence Analysis in Critical Topologies
5. Experimental Section
5.1. Research Methodology
| SMEGs | SEMEGs I | SEMEGs II | SEMEGs III |
|
|
|
|
- •
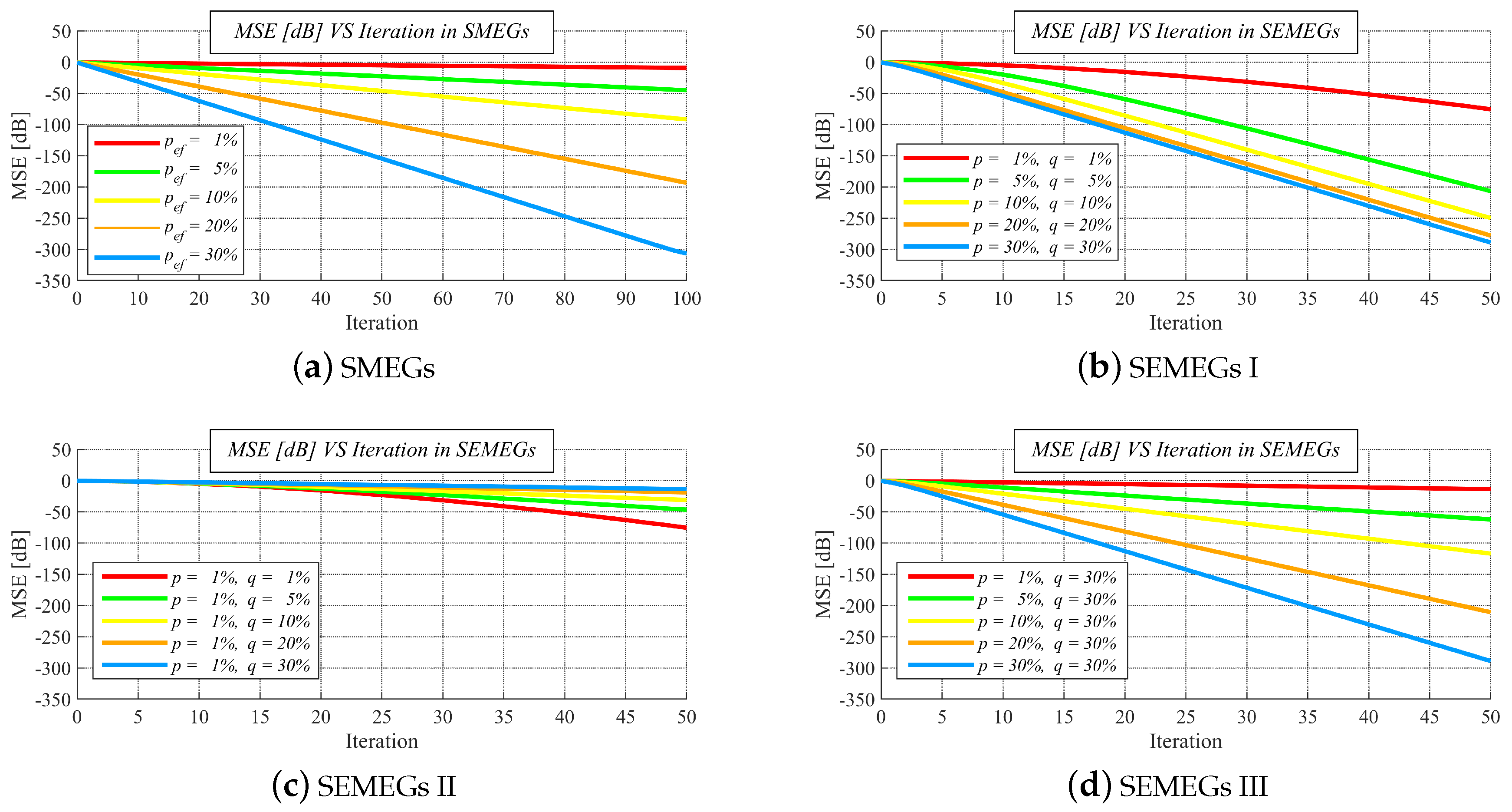
- Part I.—MSE is evaluated during the first 100 iterations over SMEGs and during the first 50 iterations over SEMEGs. For all the graph configurations in each scenario, 100 unique graphs formed by 200 vertices (i.e., n = 200) are generated. In the presented figures, MSE averaged over 100 SMEGs/SEMEGs for all the graph configurations is depicted and furthermore analyzed.
- •
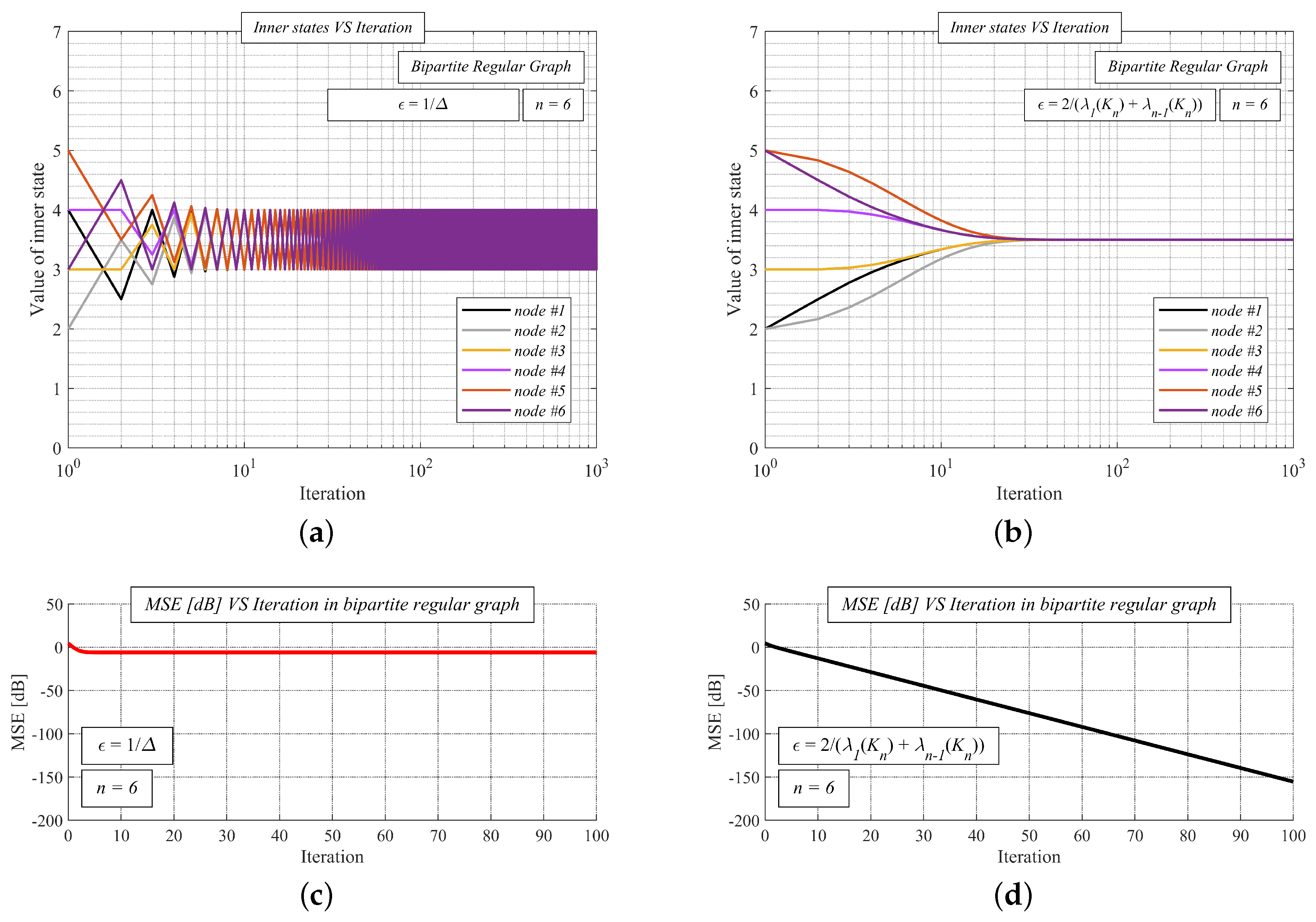
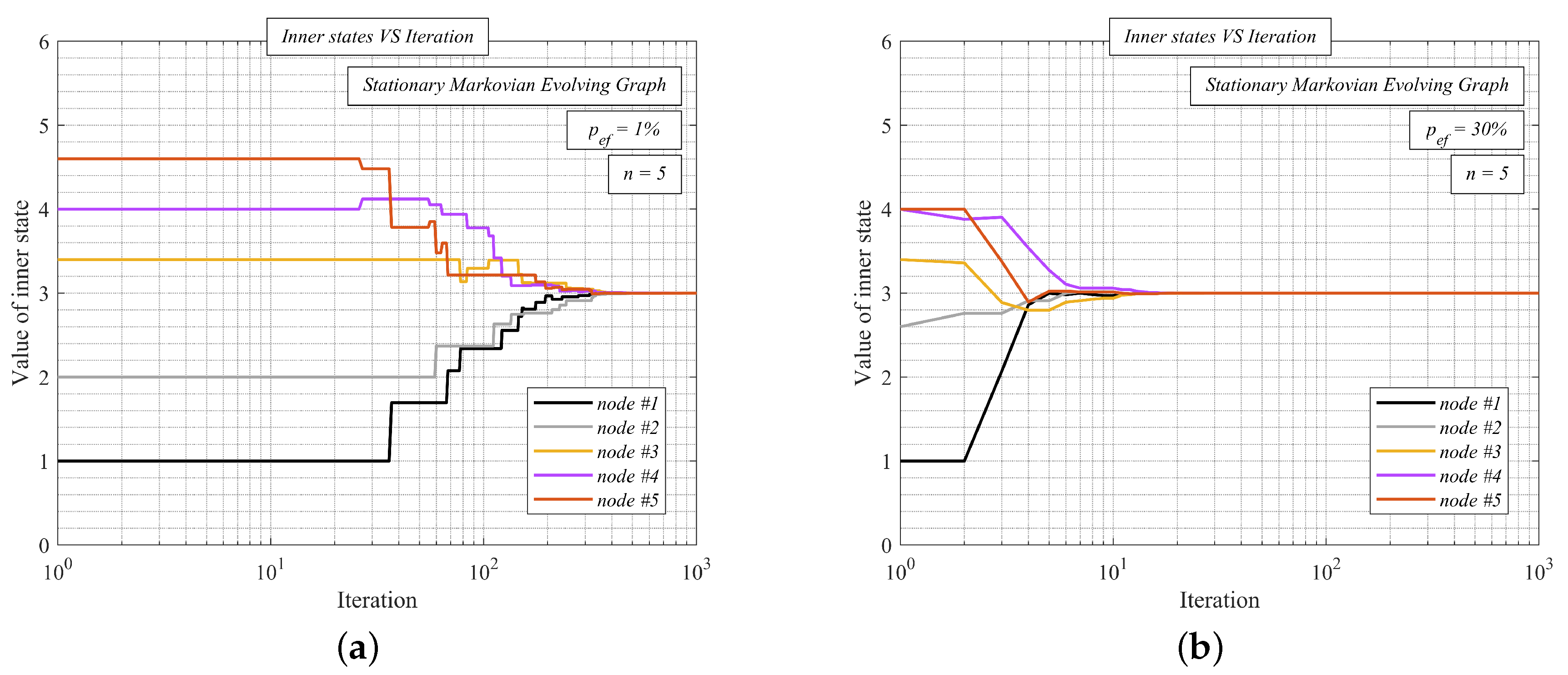
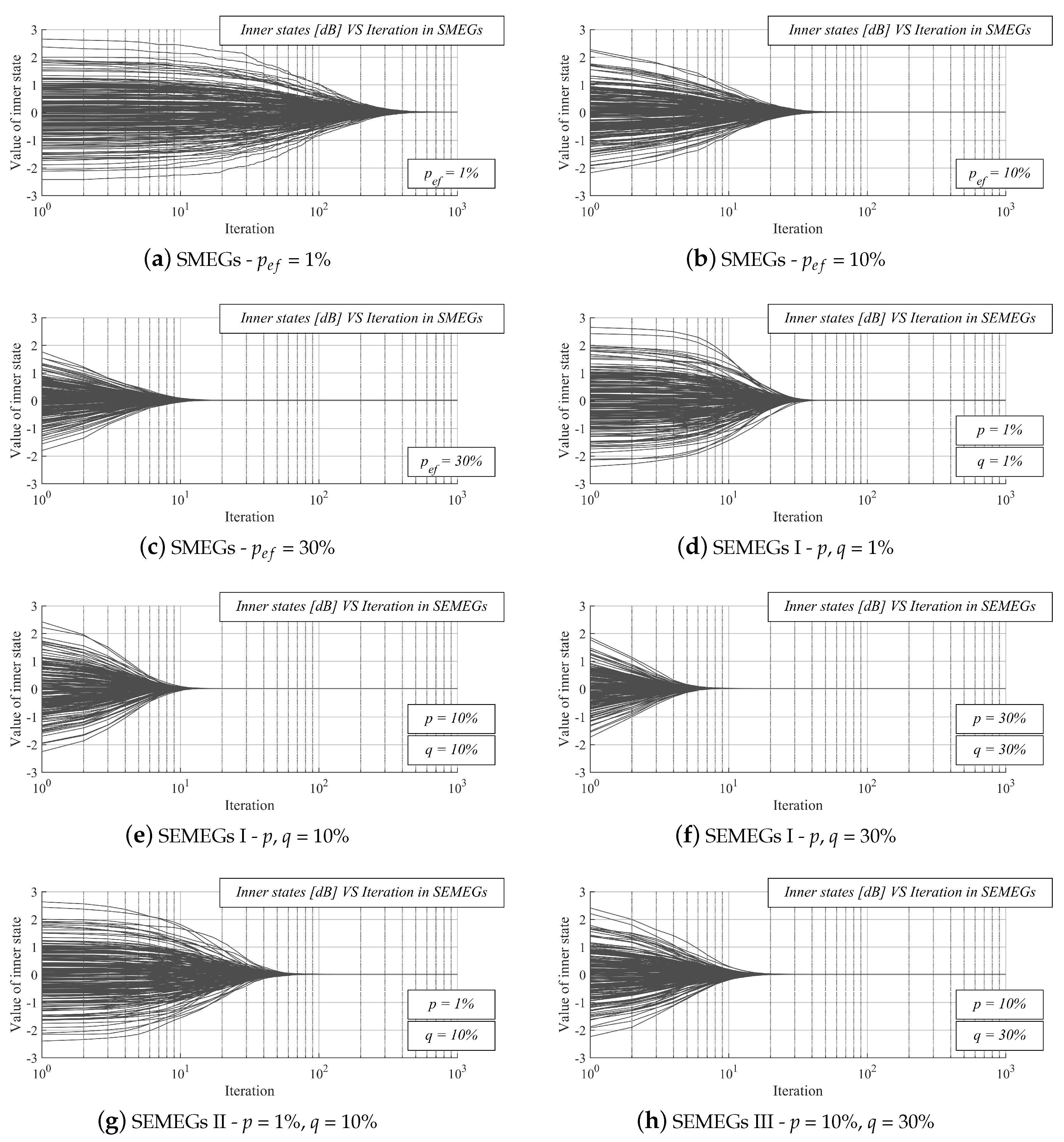
- Part II.—The numerical values of the inner states as a function of the iteration number are analyzed over the first 1000 iterations in order to show how the inner states evolve. In each figure, the results over one graph are depicted. In order to ensure good readability of the paper, the functions for only some graph configurations are provided.
- •
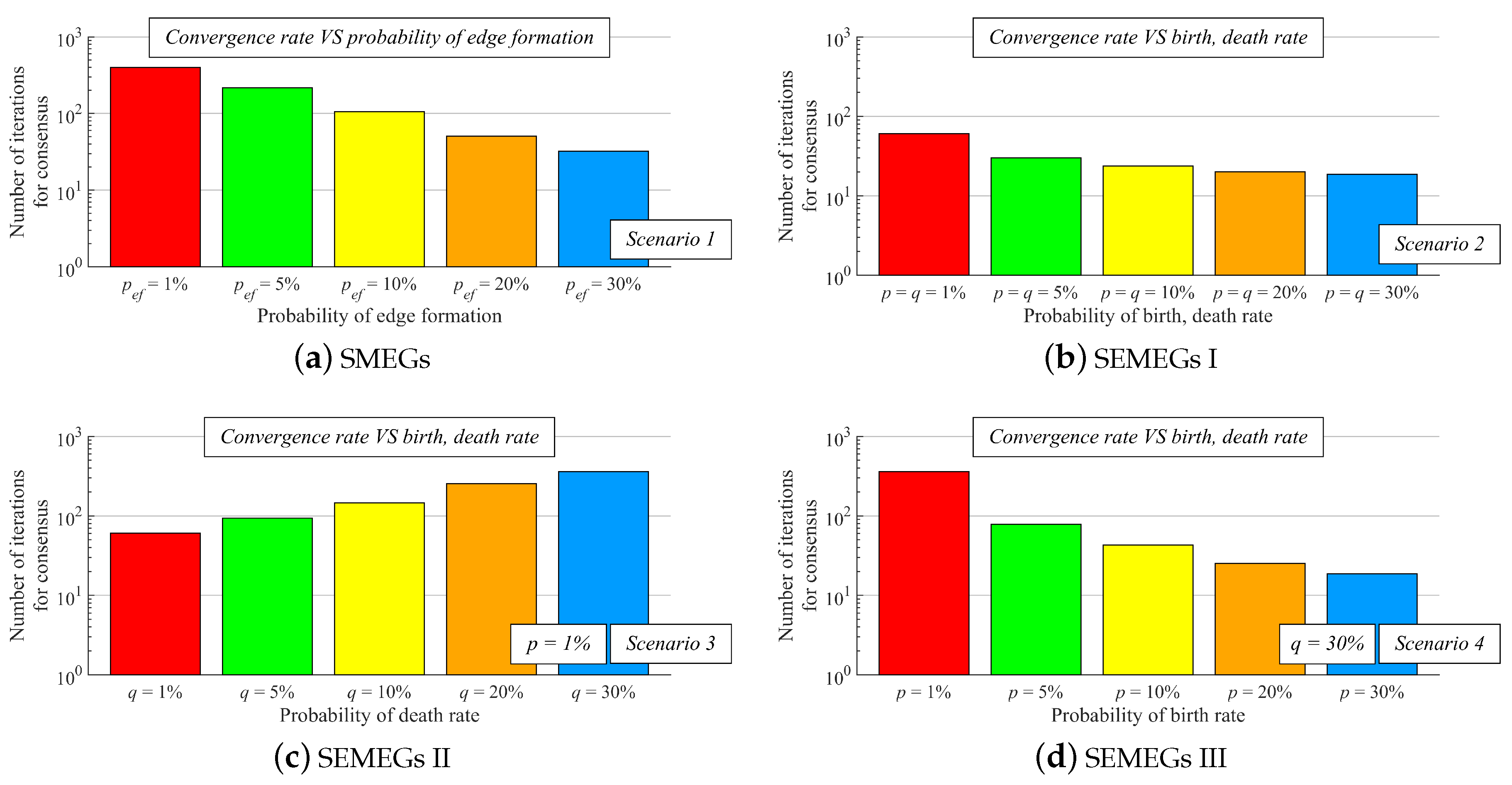
- Part III.—The convergence rate expressed as the number of the iterations for the consensus achievement is shown for all of the graph configuration in each analyzed scenario. For all of the graph configurations in each scenario, 100 unique graphs formed by 200 vertices are generated like in Part I. In the case of AC, the inner states asymptotically converge to the arithmetic mean; therefore, it is necessary to apply a stopping criterion to bound the execution of AC. In our analyses, we apply the following one:A lower value of ensures a higher precision of the final estimates, but at the cost of a deceleration of the algorithm. We set the value of this parameter to 0.0001.
5.2. Performance Analysis over Stationary Markovian Evolving Graphs/Stationary Edge-Markovian Evolving Graphs
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Average consensus algorithm |
| IoT | Internet of Things |
| MSE | Mean square error |
| MWSN | Mobile wireless sensor network |
| Probability density function | |
| SEMEG | Stationary edge-Markovian evolving graph |
| SMEG | Stationary Markovian evolving graph |
| WSN | Wireless sensor network |
References
- Waldo, J.; Lin, H.; Millett, L.I. Engaging Privacy and Information Technology in a Digital Age; National Academies Press: Washington, DC, USA, 2007. [Google Scholar]
- Gordon, S. Costs of adjustment, the aggregation problem and investment. Syst. Control. Lett. 1992, 74, 422–429. [Google Scholar] [CrossRef]
- Stamatescu, G.; Stamatescu, I.; Popescu, D. Consensus-based data aggregation for wireless sensor networks. Control Eng. Appl. Inf. 2017, 19, 43–50. [Google Scholar]
- Kenda, K.; Kazic, B.; Novak, E.; Mladenic, D. Streaming data fusion for the internet of things. Sensors 2019, 19, 1955. [Google Scholar] [CrossRef] [PubMed]
- Markovic, G.B.; Sokolovic, V.S.; Dukic, M.L. Distributed hybrid two-stage multi-sensor fusion for cooperative modulation classification in large-scale wireless sensor networks. Sensors 2019, 19, 4339. [Google Scholar] [CrossRef]
- Kenda, K.; Mladenic, D. Autonomous sensor data cleaning in stream mining setting. Bus. Syst. Res. J. 2018, 9, 69–79. [Google Scholar] [CrossRef]
- Gutierrez-Gutierrez, J.; Zarraga-Rodriguez, M.; Insausti, X. Analysis of known linear distributed average consensus algorithms on cycles and paths. Sensors 2018, 18, 968. [Google Scholar] [CrossRef]
- Izadi, D.; Abawajy, J.H.; Ghanavati, S.; Herawan, T. A data fusion method in wireless sensor networks. Sensors 2015, 15, 2964–2979. [Google Scholar] [CrossRef]
- Xiao, L.; Boyd, S.; Lall, S. A Scheme for robust distributed sensor fusion based on average consensus. In Proceedings of the International Symposium on Information Processing in Sensor Networks, Los Angeles, CA, USA, 25–27 April 2005; pp. 63–70. [Google Scholar]
- Merezeanu, D.; Nicolae, M. Consensus control of discrete-time multi-agent systems. U. Politeh. Buch. Ser. A 2017, 79, 167–174. [Google Scholar]
- Merezeanu, D.; Vasilescu, G.; Dobrescu, R. Context-aware control platform for sensor network integration. Stud. Inform. Control 2016, 25, 489–498. [Google Scholar] [CrossRef]
- Suciu, G.; Suciu, V.; Focsa, V.C.A.; Halunga, S.; Mohamed, O.A.; Arseni, S.C.; Butca, C. Integrating telemetry sensors with cloud computing. In Proceedings of the 14th RoEduNet International Conference-Networking in Education and Research, Craiova, Romania, 24–26 September 2015; pp. 218–222. [Google Scholar]
- Pilloni, V.; Atzori, L. Consensus-based resource allocation among objects in the internet of things. Ann. Telecommun. 2017, 72, 415–429. [Google Scholar] [CrossRef]
- Du, M.X.; Ma, X.F.; Zhang, Z.; Wang, X.W.; Chen, Q.J. A review on consensus algorithm of blockchain. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics, Banff CenterBanff, AB, Canada, 5–8 October 2015; pp. 2567–2572. [Google Scholar]
- Wang, L.; Xiao, F. Finite-Time Consensus Problems for Networks of Dynamic Agents. IEEE Trans. Autom. Control 2010, 10, 950–955. [Google Scholar] [CrossRef]
- Nedic, A.; Liu, J. On convergence rate of weighted-averaging dynamics for consensus problems. IEEE Trans. Autom. Control 2017, 62, 766–781. [Google Scholar] [CrossRef]
- Spanos, D.P.; Olfati-Saber, R.; Murray, R.M. Dynamic consensus on mobile networks. In Proceedings of the IFAC world congres, Prague, Czech Republic, 3–8 July 1985; pp. 1–6. [Google Scholar]
- Xiao, L.; Boyd, S.; Kim, S.J. Distributed average consensus with least-mean-square deviation. J. Parallel Distrib. Comput. 2010, 58, 2866–2874. [Google Scholar] [CrossRef]
- Kenyeres, M.; Kenyeres, J. Distributed Network Size Estimation Executed by Average Consensus Bounded by Stopping Criterion for Wireless Sensor Networks. In Proceedings of the 24th International Conference on Applied Electronics, Pilsen, Czech Republic, 10–11 September 2019; pp. 1–6. [Google Scholar]
- Ramasamy, V. Mobile Wireless Sensor Networks: An Overview. In Wireless Sensor Networks; IntechOpen Limited: London, UK, 2017. [Google Scholar]
- Amundson, I.; Koutsoukos, X.D. A survey on localization for mobile wireless sensor networks. In Proceedings of the 2nd International Workshop on Mobile Entity Localization and Tracking in GPS-less Environments, Orlando, FL, USA, 30 September 2009; pp. 235–254. [Google Scholar]
- Sabor, N.; Sasaki, S.; Abo-Zahhad, M.; Ahmed, S.M. A comprehensive survey on hierarchical-based routing protocols for mobile wireless sensor networks: Review, taxonomy, and future directions. Wirel. Commun. Mob. Comput. 2017, 2017, 2818542. [Google Scholar] [CrossRef]
- Markovic, G.; Sokolovic, V.S. A robust cooperative modulation classification scheme with intra-sensor fusion for the time-correlated flat fading channels. Def. Sci. J. 2020, 70, 60–65. [Google Scholar] [CrossRef]
- Anastasi, G.; Conti, M.; Di Francesco, M.; Passarella, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef]
- Munir, S.A.; Ren, B.; Jiao, W.; Wang, B.; Xie, D.; Ma, J. Mobile wireless sensor network: Architecture and enabling technologies for ubiquitous computing. In Proceedings of the 21st International Conference on Advanced Information Networking and ApplicationsWorkshops/Symposia (AINAW’07), Niagara Falls, ON, Canada, 21–23 May 2007; pp. 113–120. [Google Scholar]
- Yetgin, H.; Cheung, K.T.K.; El-Hajjar, M.; Hanzo, L. A Survey of Network Lifetime Maximization Techniques in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2017, 19, 828–854. [Google Scholar] [CrossRef]
- Sembroiz, D.; Ojaghi, B.; Careglio, D.; Ricciardi, S. A GRASP meta-heuristic for evaluating the latency and lifetime impact of critical nodes in large wireless sensor networks. Appl. Sci. 2019, 9, 4564. [Google Scholar] [CrossRef]
- Mass-Sanchez, J.; Ruiz-Ibarra, E.; Gonzalez-Sanchez, A.; Espinoza-Ruiz, A. Factorial design analysis for localization algorithms. Appl. Sci. 2019, 8, 2654. [Google Scholar] [CrossRef]
- Yaseem, Q.; Albalas, F.; Jararwah, Y.; Al-Ayyoub, M. Leveraging fog computing and software defined systems for selective forwarding attacks detection in mobile wireless sensor networks. Trans. Emerg. Telecommun. Technol. 2018, 29, e3183. [Google Scholar] [CrossRef]
- Schwarz, V.; Matz, G. On the performance of average consensus in mobile wireless sensor networks. In Proceedings of the IEEE 14th Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Darmstadt, Germany, 16–19 June 2013; pp. 175–179. [Google Scholar]
- Duan, X.; He, J.; Cheng, P.; Chen, J. Exploiting a Mobile Node for Fast Discrete Time Average Consensus. IEEE Trans. Control Syst. Technol. 2016, 24, 1933–2001. [Google Scholar] [CrossRef]
- Zhu, S.; Chen, C.; Ma, X.; Yang, B.; Guan, X. Consensus Based Estimation over Relay Assisted Sensor Networks for Situation Monitoring. IEEE J. Sel. Top. Signal Process. 2015, 9, 278–291. [Google Scholar] [CrossRef]
- Kenyeres, M.; Kenyeres, J. Impact of Mobility on Performance of Distributed Max/Min-Consensus Algorithm. CoMeSySo 2020, Submitted. [Google Scholar]
- Kingston, D.B.; Beard, R.W. Discrete-time average-consensus under switching network topologies. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 3551–3556. [Google Scholar]
- Ren, W.; Beard, R.W. Consensus of information under dynamically changing interaction topologies. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 4939–4944. [Google Scholar]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Schwarz, V.; Hannak, G.; Matz, G. On the convergence of average consensus with generalized Metropolis-Hasting weights. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Florence, Italy, 4–9 May 2014; pp. 5442–5446. [Google Scholar]
- Tan, Q.; Dong, X.; Li, Q.; Ren, Z. Weighted average consensus-based cubature Kalman filtering for mobile sensor networks with switching topologies. In Proceedings of the IEEE International Conference on Control and Automation, Ohrid, North Macedonia, 3–6 July 2017; pp. 271–276. [Google Scholar]
- Nedic, A.; Olshevsky, A.; Rabbat, M.G. Network Topology and Communication-Computation Tradeoffs in Decentralized Optimization. Proc. IEEE 2018, 106, 953–976. [Google Scholar] [CrossRef]
- Bahmani, B.; Kumar, R.; Mahdian, M.; Upfal, E. PageRank on an evolving graph. In Proceedings of the 18th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Beijing, China, 12–16 August 2012; pp. 24–32. [Google Scholar]
- Avin, C.; Koucky, M.; Lotker, Z. How to explore a fast-changing world (cover time of a simple random walk on evolving graphs). In Proceedings of the International Colloquium on Automata, Languages, and Programming, Reykjavik, Iceland, 7–11 July 2008; pp. 121–132. [Google Scholar]
- Clementi, A.; Monti, A.; Pasquale, F.; Silvestri, R. Information spreading in stationary Markovian evolving graphs. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 1425–1432. [Google Scholar] [CrossRef]
- Casteigts, A.; Flocchini, P.; Quattrociocchi, W.; Santoro, N. Time-varying graphs and dynamic networks. Int. J. Parallel Emergent Distrib. Syst. 2012, 27, 387–408. [Google Scholar] [CrossRef]
- Wehmuth, K.; Ziviani, A.; Fleury, E. A unifying model for representing time-varying graphs. In Proceedings of the IEEE International Conference on Data Science and Advanced Analytics, Paris, France, 19–21 October 2015; pp. 1–10. [Google Scholar]
- Zhou, S.; Lafferty, J.; Wasserman, L. Time varying undirected graphs. Mach. Learn. 2010, 80, 295–319. [Google Scholar] [CrossRef]
- Mosquera, C.; Lopez-Valcarce, R.; Jayaweera, S.K. Step-size sequence design for distributed average consensus. IEEE Trans. Signal Process. 2010, 17, 169–172. [Google Scholar] [CrossRef]
- Teranishi, Y. Subgraphs and the Laplacian spectrum of a graph. Linear Algebra Appl. 2011, 435, 1029–1033. [Google Scholar] [CrossRef][Green Version]
- Kokiopoulou, E.; Frossard, P. Accelerating distributed consensus using extrapolation. IEEE Signal Process. Lett. 2007, 14, 665–668. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Cheng, Y.J.; Fan, F.L.; Weng, C.W. An extending result on spectral radius of bipartite graphs. Tawain. J. Math. 2018, 22, 263–274. [Google Scholar] [CrossRef]
- Cvetkovic, D.M.; Doob, M.; Sachs, H. Spectra of Graphs; Academic Press: New York, NY, USA, 1979. [Google Scholar]
- Xiao, L.; Boyd, S. Fast linear iterations for distributed averaging. Syst. Control. Lett. 2004, 53, 65–78. [Google Scholar] [CrossRef]
- Brouwer, A.; Haemers, W. Spectra of Graphs; Springer: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Budianu, C.; Ben-David, S.; Tong, L. Estimation of the number of operating sensors in large-scale sensor networks with mobile access. IEEE Trans. Signal Process. 2006, 54, 1703–1715. [Google Scholar] [CrossRef]
- Shames, I.; Charalambous, T.; Hadjicostis, C.N.; Johansson, M. Distributed network size estimation and average degree estimation and control in networks isomorphic to directed graphs. In Proceedings of the 50th Annual Allerton Conference on Communication, Control, and Computing, Monticello, IL, USA, 1–5 October 2012; pp. 1885–1892. [Google Scholar]
- Kempe, D.; Dobra, A.; Gehrke, J. Gossip-based computation of aggregate information. In Proceedings of the 44th Annual IEEE Symposium on Foundations of Computer Science, Cambridge, MA, USA, 11–14 October 2003; pp. 482–491. [Google Scholar]
- Das, K.C. A characterization on graphs which achieve the upper bound for the largest Laplacian eigenvalue of graphs. Linear Algebra Appl. 2004, 376, 173–186. [Google Scholar] [CrossRef]
- Pereira, S.S.; Pages-Zamora, A. Mean square convergence of consensus algorithms in random WSNs. IEEE Trans. Signal Process 2010, 58, 2866–2874. [Google Scholar] [CrossRef]













© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kenyeres, M.; Kenyeres, J. Average Consensus over Mobile Wireless Sensor Networks: Weight Matrix Guaranteeing Convergence without Reconfiguration of Edge Weights. Sensors 2020, 20, 3677. https://doi.org/10.3390/s20133677
Kenyeres M, Kenyeres J. Average Consensus over Mobile Wireless Sensor Networks: Weight Matrix Guaranteeing Convergence without Reconfiguration of Edge Weights. Sensors. 2020; 20(13):3677. https://doi.org/10.3390/s20133677
Chicago/Turabian StyleKenyeres, Martin, and Jozef Kenyeres. 2020. "Average Consensus over Mobile Wireless Sensor Networks: Weight Matrix Guaranteeing Convergence without Reconfiguration of Edge Weights" Sensors 20, no. 13: 3677. https://doi.org/10.3390/s20133677
APA StyleKenyeres, M., & Kenyeres, J. (2020). Average Consensus over Mobile Wireless Sensor Networks: Weight Matrix Guaranteeing Convergence without Reconfiguration of Edge Weights. Sensors, 20(13), 3677. https://doi.org/10.3390/s20133677