Moving Object Detection under a Moving Camera via Background Orientation Reconstruction


Abstract
1. Introduction
2. Related Works
3. Methodology
3.1. Poisson Fusion
3.2. Motion Saliency through Background Orientation Reconstructed
3.3. Enhancement Algorithm Based on Weighted Spatial Accumulation
3.4. False Positives Rejection Based on Motion Continuity in the Temporal Domain
4. Experiment
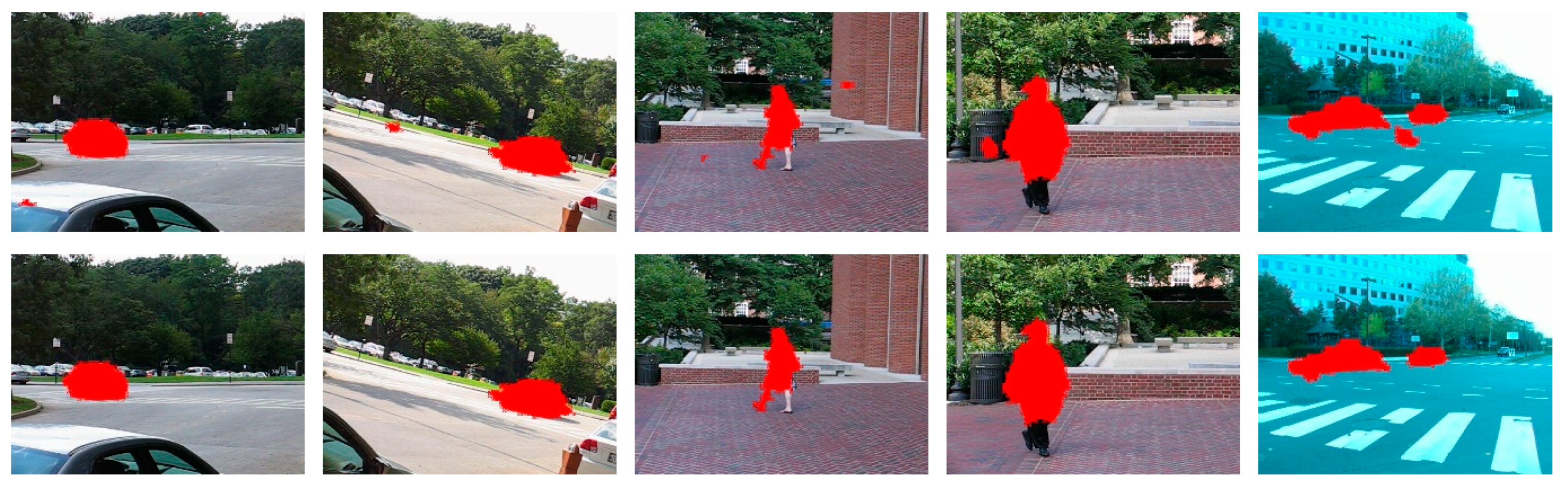
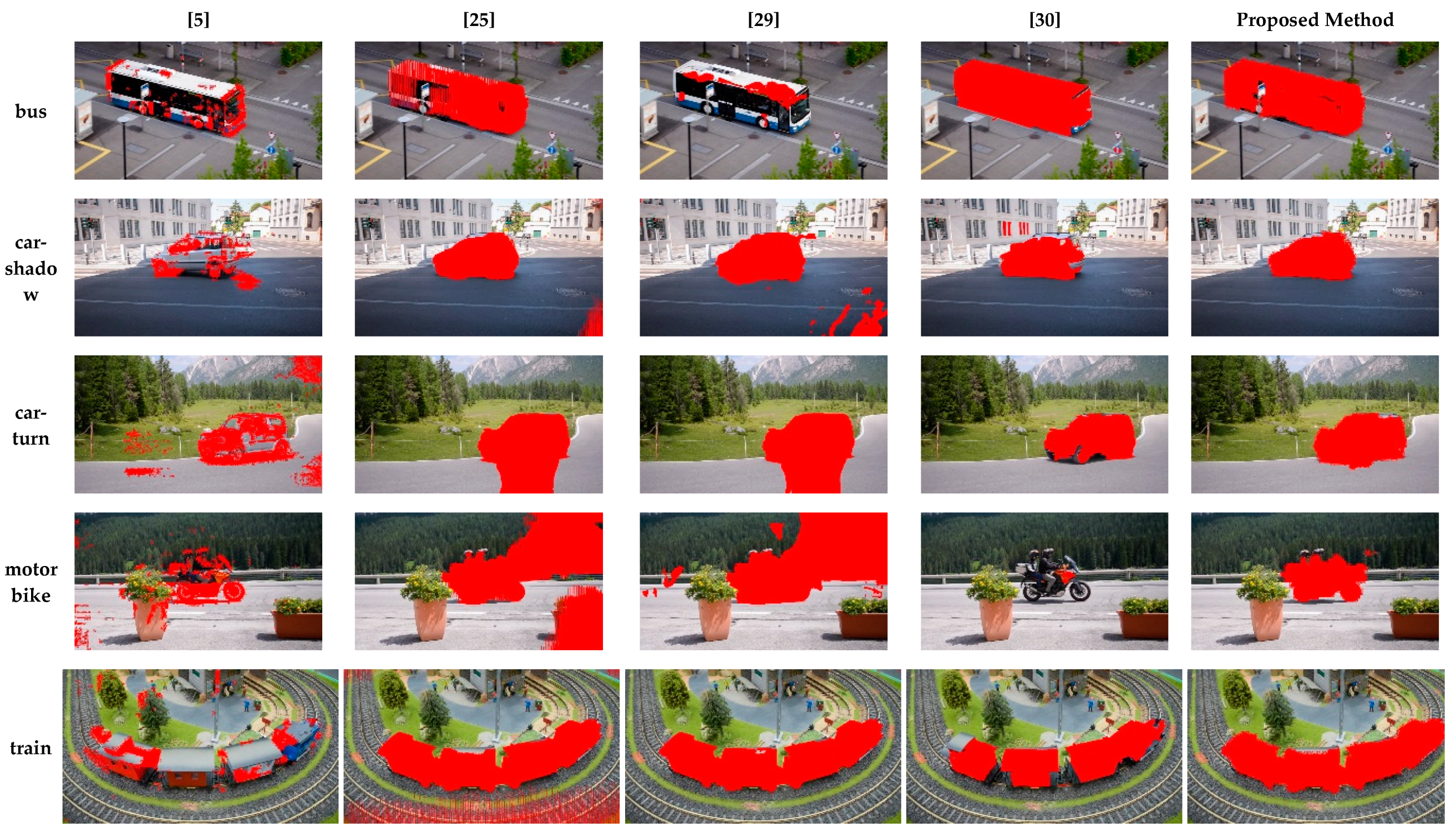
4.1. Qualitative Comparison
4.2. Quantitative Comparison
4.3. Computational Efficiency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Royden, C.S.; Moore, K.D. Use of speed cues in the detection of moving objects by moving observers. Vis. Res. 2012, 59, 17–24. [Google Scholar] [CrossRef] [PubMed]
- Barnich, O.; Van Droogenbroeck, M. ViBe: A universal background subtraction algorithm for video sequences. IEEE Trans. Image Process. 2010, 20, 1709–1724. [Google Scholar] [CrossRef] [PubMed]
- Elgammal, A.; Harwood, D.; Davis, L. Non-parametric model for background subtraction. In Proceedings of the 6th European Conference on Computer Vision, Dublin, Ireland, 26 June–1 July 2000; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Yong, H.; Meng, D.; Zuo, W.; Zhang, K. Robust online matrix factorization for dynamic background subtraction. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 1726–1740. [Google Scholar] [CrossRef] [PubMed]
- Yi, K.M.; Yun, K.; Kim, S.W.; Chang, H.J.; Choi, J.Y.; Jeong, H. Detection of moving objects with non-stationary cameras in 5.8ms: Bringing motion detection to your mobile device. In Computer Vision & Pattern Recognition Workshops; IEEE: Portland, Oregon, 2013. [Google Scholar]
- Wan, Y.; Wang, X.; Hu, H. Automatic moving object segmentation for freely moving cameras. Math. Probl. Eng. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Wu, M.; Peng, X.; Zhang, Q. Segmenting moving objects from a freely moving camera with an effective segmentation cue. Meas. Sci. Technol. 2011, 22, 25108. [Google Scholar] [CrossRef]
- Kurnianggoro, L.; Yu, Y.; Hernandez, D.; Jo, K.-H. Online Background-Subtraction with Motion Compensation for Freely Moving Camera. In International Conference on Intelligent Computing; IEEE: Lanzhou, China, 2016; pp. 569–578. [Google Scholar] [CrossRef]
- Odobez, J.M.; Bouthemy, P. Separation of moving regions from background in an image sequence acquired with a mobile camera. In Video Data Compression for Multimedia Computing: Statistically Based and Biologically Inspired Techniques; Springer: Boston, MA, USA, 1997. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar] [CrossRef]
- Zhang, X.; Sain, A.; Qu, Y.; Ge, Y.; Hu, H. Background subtraction based on integration of alternative cues in freely moving camera. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 1933–1945. [Google Scholar] [CrossRef]
- Kim, S.W.; Yun, K.; Yi, K.M.; Kim, S.J.; Choi, J.Y. Detection of moving objects with a moving camera using non-panoramic background model. Mach. Vis. Appl. 2012, 24, 1015–1028. [Google Scholar] [CrossRef]
- Narayana, M.; Hanson, A.; Learned-Miller, E. Coherent motion segmentation in moving camera videos using optical flow orientations. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1577–1584. [Google Scholar]
- Pérez, P.; Gangnet, M.; Blake, A. Poisson image editing. ACM Trans. Graphics 2003, 22, 313. [Google Scholar] [CrossRef]
- Yazdi, M.; Bouwmans, T. New trends on moving object detection in video images captured by a moving camera: A survey. Comput. Sci. Rev. 2018, 28, 157–177. [Google Scholar] [CrossRef]
- Chapel, M.-N.; Bouwmans, T. Moving objects detection with a moving camera: A comprehensive review. arXiv 2020, arXiv:2001.05238. Available online: https://arxiv.org/abs/2001.05238 (accessed on 30 May 2020).
- Kim, J.; Wang, X.; Wang, H.; Zhu, C.; Kim, D. Fast moving object detection with non-stationary background. Multimedia Tools Appl. 2012, 67, 311–335. [Google Scholar] [CrossRef]
- Sheikh, Y.; Javed, O.; Kanade, T. Background subtraction for freely moving cameras. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 1219–1225. [Google Scholar]
- Brox, T.; Malik, J. Object segmentation by long term analysis of point trajectories. In Proceedings of the 11th European Conference on Computer Vision, Heraklion, Greece, 5–11 September 2010; Springer: Heraklion Greece, 2010; pp. 282–295. [Google Scholar]
- Ochs, P.; Malik, J.; Brox, T. Segmentation of moving objects by long term video analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1187–1200. [Google Scholar] [CrossRef] [PubMed]
- Nonaka, Y.; Shimada, A.; Nagahara, H.; Taniguchi, R.-I. Real-time foreground segmentation from moving camera based on case-based trajectory classification. In Proceedings of the 2013 2nd IAPR Asian Conference on Pattern Recognition, Okinawa, Japan, 5–8 November 2013; pp. 808–812. [Google Scholar]
- Elqursh, A.; Elgammal, A. Online moving camera background subtraction. Appl. Evol. Comput. 2012, 7577, 228–241. [Google Scholar]
- Bugeau, A.; Perez, P. Detection and segmentation of moving objects in complex scenes. Comput. Vis. Image Underst. 2009, 113, 459–476. [Google Scholar] [CrossRef]
- Gao, Z.; Tang, W.; He, L. Moving object detection with moving camera based on motion saliency. J. Comput. Appl. 2016, 36, 1692–1698. [Google Scholar]
- Huang, J.; Zou, W.; Zhu, J.; Zhu, Z. Optical flow based real-time moving object detection in unconstrained scenes. arXiv 2018, arXiv:1807.04890. Available online: https://arxiv.org/abs/1807.04890 (accessed on 30 May 2020).
- Sajid, H.; Cheung, S.-C.S.; Jacobs, N. Motion and appearance based background subtraction for freely moving cameras. Signal. Process. Image Commun. 2019, 75, 11–21. [Google Scholar] [CrossRef]
- Zhou, D.; Frémont, V.; Quost, B.; Dai, Y.; Li, H. Moving object detection and segmentation in urban environments from a moving platform. Image Vis. Comput. 2017, 68, 76–87. [Google Scholar] [CrossRef]
- Namdev, R.K.; Kundu, A.; Krishna, K.M.; Jawahar, C.V. Motion segmentation of multiple objects from a freely moving monocular camera. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4092–4099. [Google Scholar]
- Bideau, P.; Learned-Miller, E. It’s Moving! A probabilistic model for causal motion segmentation in moving camera videos. In Proceedings of the 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016. [Google Scholar]
- Papazoglou, A.; Ferrari, V. Fast object segmentation in unconstrained video. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1777–1784. [Google Scholar]
- Chen, T.; Lu, S. Object-level motion detection from moving cameras. IEEE Trans. Circuits Syst. Video Technol. 2016, 27, 2333–2343. [Google Scholar] [CrossRef]
- Wu, Y.; He, X.; Nguyen, T.Q. Moving object detection with a freely moving camera via background motion subtraction. IEEE Trans. Circuits Syst. Video Technol. 2015, 27, 236–248. [Google Scholar] [CrossRef]
- Zhu, Y.; Elgammal, A. A multilayer-based framework for online background subtraction with freely moving cameras. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5142–5151. [Google Scholar]
- Trefethen, L.N.; Bau, D. Numerical Linear Algebra; SIAM: Philadelphia, PA, USA, 1997. [Google Scholar]
- Hu, J.; Tang, H. Numerical Method of Differential Equation; Science Press: Beijing, China, 2007. [Google Scholar]
- Perazzi, F.; Pont-Tuset, J.; McWilliams, B.; Van Gool, L.; Gross, M.; Sorkine-Hornung, A. A benchmark dataset and evaluation methodology for video object segmentation. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 724–732. [Google Scholar]
- Sun, D.; Roth, S.; Black, M. Secrets of optical flow estimation and their principles. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2010, San Francisco, CA, USA, 13–18 June 2010. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | [5] | [25] | [29] | [30] | Proposed Method | |
|---|---|---|---|---|---|---|
| Sequence | ||||||
| Seq1 | 26.41 | 21.82 | 35.08 | 8.49 | 36.40 | |
| Seq2(1) | 34.55 | 50.49 | 63.66 | 33.88 | 54.95 | |
| Seq2(2) | 39.54 | 25.89 | 58.16 | 42.24 | 49.43 | |
| Seq2(3) | 24.40 | 33.27 | 24.85 | 24.24 | 49.27 | |
| Seq3 | 22.46 | 58.50 | 37.84 | 19.98 | 41.54 | |
| Seq7 | 39.15 | 87.63 | 21.26 | 60.40 | 66.70 | |
| Cars1 | 27.04 | 64.24 | 59.24 | 68.03 | 74.12 | |
| Cars2 | 10.45 | 19.98 | 65.35 | 1.07 | 48.42 | |
| Cars4 | 19.94 | 45.27 | 17.29 | 37.22 | 62.32 | |
| Cars6 | 18.32 | 88.04 | 89.17 | 80.54 | 80.30 | |
| Cars7 | 22.70 | 64.80 | 91.24 | 42.27 | 81.05 | |
| Cars8 | 27.45 | 83.20 | 80.69 | 71.69 | 81.41 | |
| Cars9 | 12.51 | 31.20 | 40.73 | 41.05 | 44.82 | |
| People1 | 37.97 | 75.64 | 76.57 | 55.44 | 70.34 | |
| People2 | 36.73 | 69.05 | 77.46 | 75.52 | 73.31 | |
| bear | 11.61 | 37.34 | 79.76 | 83.68 | 70.18 | |
| bus | 39.19 | 81.42 | 79.19 | 70.90 | 80.49 | |
| car-shadow | 29.17 | 79.03 | 30.88 | 69.79 | 74.50 | |
| car-turn | 48.02 | 64.10 | 65.33 | 68.63 | 67.05 | |
| motorbike | 36.49 | 49.92 | 42.30 | 33.53 | 59.91 | |
| train | 16.47 | 75.83 | 90.22 | 72.70 | 75.03 | |
| Average | 27.65 | 57.46 | 58.39 | 50.54 | 63.88 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Sun, X.; Yu, Q. Moving Object Detection under a Moving Camera via Background Orientation Reconstruction. Sensors 2020, 20, 3103. https://doi.org/10.3390/s20113103
Zhang W, Sun X, Yu Q. Moving Object Detection under a Moving Camera via Background Orientation Reconstruction. Sensors. 2020; 20(11):3103. https://doi.org/10.3390/s20113103
Chicago/Turabian StyleZhang, Wenlong, Xiaoliang Sun, and Qifeng Yu. 2020. "Moving Object Detection under a Moving Camera via Background Orientation Reconstruction" Sensors 20, no. 11: 3103. https://doi.org/10.3390/s20113103
APA StyleZhang, W., Sun, X., & Yu, Q. (2020). Moving Object Detection under a Moving Camera via Background Orientation Reconstruction. Sensors, 20(11), 3103. https://doi.org/10.3390/s20113103