Abstract
Due to the disturbance of wind field, it is difficult to achieve precise airship positioning and navigation in the stratosphere. This paper presents a new constrained unscented particle filter (UPF) for SINS/GNSS/ADS (inertial navigation system/global navigation satellite system/atmosphere data system) integrated airship navigation. This approach constructs a wind speed model to describe the relationship between airship velocity and wind speed using the information output from ADS, and further establishes a mathematical model for SINS/GNSS/ADS integrated navigation. Based on these models, it also develops a constrained UPF to obtain system state estimation for SINS/GNSS/ADS integration. The proposed constrained UPF uses the wind speed model to constrain the UPF filtering process to effectively resist the influence of wind field on the navigation solution. Simulations and comparison analysis demonstrate that the proposed approach can achieve optimal state estimation for SINS/GNSS/ADS integrated airship navigation in the presence of wind field disturbance.
1. Introduction
The stratosphere, which is located at the bottom of the near space with the altitude between 10 km to 50 km, is a new region of human activities in space [1,2]. As a typical aircraft flying in the stratosphere, an airship has the advantages of high flight altitude, large coverage, and low-cost [2,3]. However, due to the disturbance of wind field in the stratosphere, airship positioning and navigation remain a challenging research problem.
The airship relies on an integrated navigation system for positioning and navigation. Inertial navigation system (INS)/global navigation satellite system (GNSS) integration is the most widely used integrated navigation system [4,5]. However, due to the near-far and ionosphere effects, satellite signals may be shielded or submerged. The signal reception rate declines to 60% or even lower in environments with valleys, underground areas, or business districts [5,6]. When satellite signals cannot be received normally, the error of INS will be accumulated over time, deteriorating the navigation accuracy [7,8,9].
The atmosphere data system (ADS) utilizes pressure, temperature, and geographic information (such as position calibration data, airspeed, airflow data, and time) provided by the atmospheric sensor to calculate the velocity and altitude of an aerial vehicle [10,11]. ADS does not rely on external conditions to obtain the navigation information. It has high reliability and its performance is not affected by height, topography, and other factors [11,12]. Given its advantages, ADS is an ideal auxiliary for INS/GNSS navigation to compensate the error of INS, especially when GNSS signal is poor, rendering INS/GNSS/ADS integration as a promising scheme to improve the navigation accuracy and reliability [13]. However, when using INS/GNSS/ADS integration for airship navigation, the navigation performance is significantly disturbed by wind field due to the long-span flexible balloon structure and low speed of the airship.
The performance of INS/GNSS/ADS integration is dominated by the filtering algorithm used [14,15,16]. The particle filter (PF) is an optimal recursive Bayesian filtering method based on Monte Carlo simulation by producing a sample of independent random variables according to a conditional probability distribution [17,18]. It is easy to implement, suitable for high-dimensional problems, and capable of handling nonlinear and non-Gaussian models [18,19]. However, the accuracy of PF relies on importance sampling. PF also requires the design of a proposal distribution to accurately approximate the posterior distribution, while in practice it is difficult to find such a proposal distribution [20,21].
The unscented Kalman filter (UKF) is able to generate a proposal distribution with larger high-order moment and the mean that is close to the true mean of the target distribution [22,23]. The combination of UKF into PF results in the so-called unscented particle filter (UPF), which is widely used in many fields including aircraft navigation, underwater navigation, GPS precise point positioning, nonlinear system identification, and audio source separation [24,25,26,27,28]. However, UPF is incapable of handling the disturbance of wind field for INS/GNSS/ADS integrated airship navigation. The robust adaptive UPF (RAUPF) is a method for system state estimation in the presence of abnormal observations and kinematic model noise [29,30]. This method adaptively determines the equivalent weight function according to robust estimation and adaptively adjusts the adaptive factor constructed from predicted residuals to inhibit the disturbances of abnormal observation and kinematic model noise. However, the wind field in the stratosphere has a unique form of disturbance, which is completely different from kinematic model noise and observation noise, requiring a special way to handle. Further, it cannot guarantee the covariance matrices in the filtering process are positive-definite, leading to the stability issue.
This paper presents a new constrained UPF for SINS/GNSS/ADS integrated airship navigation under the disturbance of wind field. A model of wind speed is established using ADS output information to describe the relationship between airship velocity and wind speed. Further, a mathematical model is also established for SINS/GNSS/ADS integrated airship navigation. Based on these models, a constrained UPF is developed to fuse SINS and GNSS measurements to generate the optimal state estimation for SINS/GNSS/ADS integration. This constrained UPF applies the wind speed model as a constraint to the UPF filtering process to effectively inhibit the influence of wind filed on the navigation solution. Simulations and comparison analysis have been conducted to comprehensively evaluate the performance of the proposed constrained UPF for SINS/GNSS/ADS integrated airship navigation in the presence of wind disturbance.
2. Mathematical Model of SINS/GNSS/ADS Integrated Navigation
2.1. Wind Speed Model
In the E–N–U (East-North-Up) geography coordinate system, the wind speed model can be expressed as
where, is the wind speed, is a random constant wind, and is a random wind expressed as the first-order Markov process, and
where stands for the projection of wind speed in the East, North, and Up directions, as shown in Figure 1; the symbols and have the similar meanings as ; and is the white noise in the corresponding direction.
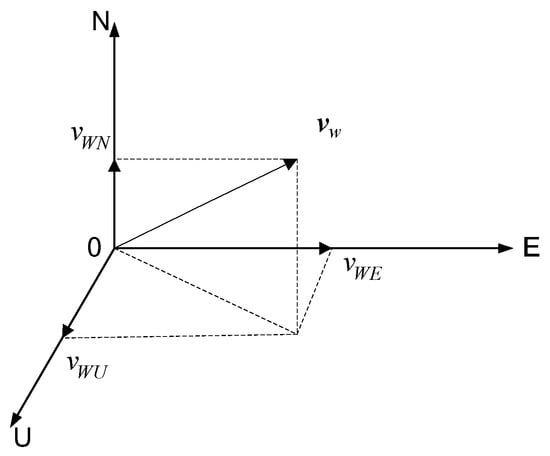
Figure 1.
The components of the wind speed in the coordinate system E–N–U.
As shown in Figure 2, via the wind speed, the airship velocity relative to the Earth can be expressed as
where and denote the airship velocities relative to the Earth and atmosphere, is the angle between the horizontal axis and wind speed , and and are the angles from and to the horizontal axis, respectively.
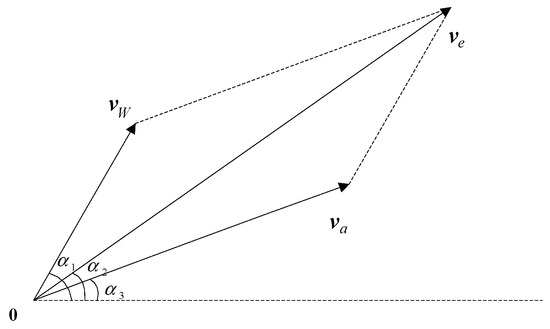
Figure 2.
Wind speed synthetic relationship.
2.2. System State Equation of SINS/GNSS/ADS Integrated Navigation
The base coordinate system for establishment of the system state model is the E–N–U geography coordinate system. The system state of SINS/GNSS/ADS is defined as
where , and represent the platform misalignment angle of SINS; , and the velocity error of SINS; , and the position error of SINS; , and the velocity error of GNSS; , and the position error of GNSS; , and the constant wind speed error; and , and the random wind speed error.
The system state equation is
where is a nonlinear function of the state and is expressed by
where is the Euler platform error angle matrix; and are the attitude transformation matrices; is the errors of gravity; is the measurement error of the gyro; is the rotational angular velocity of the Earth; is the angular velocity of the vehicle relative to the Earth; is the rotational angular velocity of the Earth; , and are the actual values of , and in the actual navigation frame; , and represent the corresponding errors; represents the velocity error in the corresponding direction; and are the longitude and height of the airship; and are the errors of and , respectively; () is the relevant time; and are the specific force and its associated error, respectively; and are the meridian and prime vertical radiuses of curvature; and and are the errors of and , respectively.
The system noise vector is described as
where are the random noise of the state.
2.3. Measurement Equation of SINS/GNSS/ADS Integrated Navigation
SINS/GNSS/ADS integration consists of the SINS/GNSS subsystem and SINS/ADS subsystem. The measurement equation of the SINS/GNSS subsystem is obtained based on the position information integration, which is expressed by
where , and are the latitude, longitude and altitude of SINS, respectively; , and are the latitude, longitude and altitude of GNSS, respectively; and , and are the errors of the GNSS. It should be noted that the errors of these sensors are considered to be known in this paper.
The measurement equation of SINS/ADS subsystem is expressed by
where , and are the velocities of SINS and , and are the velocities of ADS. It should be noted that the velocity used in this paper is relative to the geographic frame and is calculated from the airspeed.
The system measurement equation of SINS/GNSS/ADS integration is described as
where
Thus, (5) and (12) provide the mathematical model for SINS/GNSS/ADS integrated navigation.
2.4. Wind Field-Based Constraint Model
In the most cases of airship flight, the vertical wind speed in the stratosphere is stable and close to a constant value (~20 km/s), and the airship does not change the altitude often. Thus, for simplicity, the vertical wind speed is neglected and it is also assumed that the altitude of the airship remains constant. Based on this, the airship state error equation can be written as [31]
where and are the airship velocity error on the x and y axes, respectively; and are the airship velocity errors relative to the atmosphere and Earth; and are the projections of the wind speed on the East and North directions, respectively, and is the angle rate.
By combining (15) with (4), the constraint equation can be expressed as
where the state constraint matrix and the constraint vector quantity are expressed as
where and are the wind speeds in the East and North directions, respectively.
3. Constrained Unscented Particle Filter
3.1. Conventional Unscented Particle Filter
Consider the state equation of a discrete system
where denotes the state vector at epoch , is a nonlinear function, and is the process noise.
The measurement equation of the discrete system is
where denotes the measurement vector, is also a nonlinear function, and is the measurement noise.
The conventional UPF includes the following steps.
Step 1. Initialization:
For , draw the states from the prior and let
The sigma points can be selected as
where and are the importance weights of the mean and covariance; is a coefficient to control the distribution of sampling points; is a non-negative weighting coefficient for describing the prior distribution of X; is a scaling parameter; and is the dimension of the augmented state, where , and are the dimensions of state vector , process noise and measurement noise , respectively.
Step 2. For
- (I)
- Importance samplingFor , update the particles with UKF:
- (a)
- Calculate the sigma points
- (b)
- Time update
- (c)
- Measurement updateThe particles are sampled by . Subsequently, set and , and normalize the importance weights.
- (II)
- ResamplingIgnore the samples with low importance weights. To obtain random samples approximately distributed according to , we duplicate the particles having high weights and set .
- (III)
- Output
3.2. Convergence of Constrained UPF
Suppose system state is subject to the following constraint
where denotes the state constraint matrix and the constraint vector quantity.
If the estimate of UPF is projected on the constraint surface, this minimum projection is given as (for clarity, we substitute and with and , respectively)
such that
To solve the above minimum problem, the Lagrange function is constructed as
From (42), we get
and
According to (43), we obtain
From (45), we readily have
Substituting (46) into (45) yields
From (45) we also have
Substituting (47) into (48) yields
Thus, the state estimate by the constrained UPF can be obtained as
where denotes the system state estimation from UPF.
From the above it can be seen that the state estimate given by (50) is actually an optimal solution under the constraint of the wind field model expressed by (16).
3.3. Convergence of Constrained UPF
Lemma 1.
For the nonlinear dynamic system described by (19) and (20), the relationship among nonlinear function, prior distribution, and posterior distributionof statecan be expressed as
The proof of Lemma 1 can be found in Appendix A.
Lemma 2.
Assume that for any functionand constant,
Then, we readily have
The proof of Lemma 2 can be found in Appendix B.
Lemma 3.
Given the system equation defined by (19), the relationship among nonlinear function, prior distribution, and posterior distributionof statecan also be expressed as
The proof of Lemma 3 can be found in Appendix C.
Theorem 1.
Given the system equation defined by (19), for all, there exists a constant, which is independent of, such that for any,
The proof of Theorem 1 can be found in Appendix D.
4. Simulations and Analysis
Simulations were conducted to evaluate the performance of the proposed constrained UPF algorithm for a SINS/GNSS/ADS integrated airship navigation system. Comparison analysis with the extended Kalman filter (EKF) and the robust adaptive UPF (RAUPF) [29,30] was also conducted to demonstrate the improved performance of the proposed algorithm.
Suppose the airship with a SINS/GNSS/ADS integrated navigation system is flying in the stratosphere. The airship moves to the East at a speed of 20 m/s, and the initial position of the airship is at East longitude 108.9°, North latitude 34.2°, and altitude 20 km. The flight time is 800 s. The Earth’s rotation angular velocity is , the radius of the earth is , and the acceleration of gravity is . The sampling periods of SINS, GNSS, and ADS are 0.01 s, 0.2 s, and 1 s, respectively. The filtering period is 1s. The initial position error is () and the velocity error is m/s. The gyro’s random drift and walk are 0.1°/h and 0.01°/, respectively. The accelerometer’s zero offset and random walk are and , respectively. The horizontal and altitude positioning errors of GNSS are 0.6 m and 2 m, the barometric altimeter error is 20 m, and the velocity error is 2 m/s. The airspace above sea level within the altitude of 20 km is mainly dominated by west wind with a speed below 20 m/s. The gust wind in the airspace is in the North by East 10° with the speed of 0–2 m/s.
To study the performance of the proposed constrained UPF, trials were conducted under different average wind speeds of 10 m/s, 15 m/s, and 20 m/s, respectively. The initial state variance, system noise covariance and observation noise covariance are set as
where stands for the observation noise covariances for the cases of different average wind speeds.
The estimated velocity and position errors under different wind speeds are shown in Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8, and their corresponding mean values are listed in Table 1, Table 2 and Table 3. In the case of 10 m/s constant wind, during the time period from 0 s to 600 s, the velocity and position errors obtained by EKF beyond ±2 m/s and ±20 m, respectively. This is because the linearization of system model causes a large navigation error. RAUPF improves the performance of EKF. The velocity and position errors obtained by RAUPF are within (−0.7 m/s, +0.7 m/s) and (−7 m, +7 m). They are also much larger than those errors by the constrained UPF, which are within (−0.3 m/s, +0.3 m/s) and (−4 m, +4 m). Considering that the performance of EKF is too poor for the wind field disturbance, in the following we shall focus on the comparison of RAUPF with the proposed constrained UPF for the cases of 15 m/s and 20 m/s wind speeds. The similar trend can also be observed for these two cases. In the case of 15m/s constant wind, the velocity and position errors obtained by RAUPF are within (−1.1 m/s, +1.1 m/s) and (−8 m, +8 m), while those by the constrained UPF are within (−0.6 m/s, +0.6 m/s) and (−5.5 m, +5.5 m). In the case of 20 m/s constant wind, the velocity and position errors obtained by RAUPF are within (−1.6m/s, +1.6 m/s) and (−9.5 m, +9.5 m), while those by the constrained UPF are within (−0.7 m/s, +0.7 m/s) and (−6 m, +6 m). Therefore, it is evident that the velocity and position errors obtained by the proposed constrained UPF are much smaller than those by RAUPF.
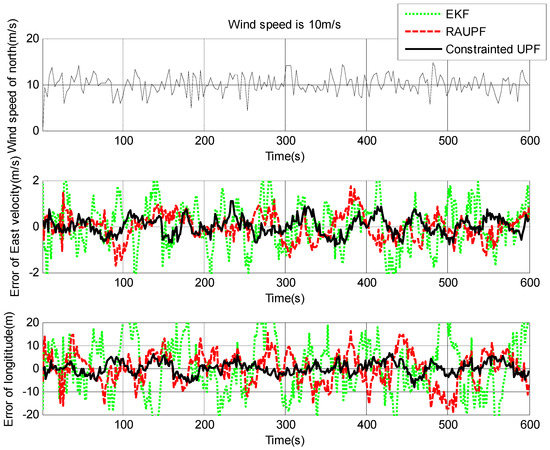
Figure 3.
East velocity and longitude errors under the wind speed of 10 m/s.
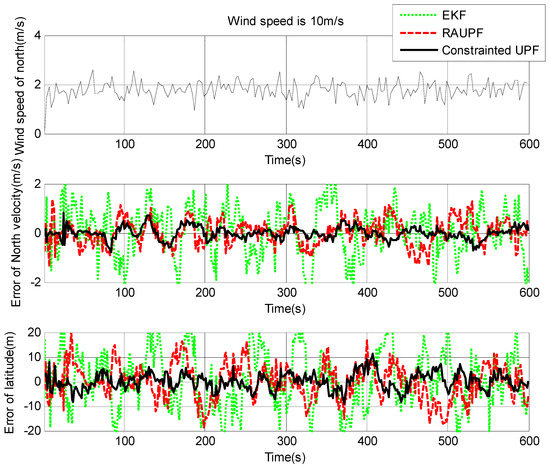
Figure 4.
North velocity and latitude errors under the wind speed of 10 m/s.
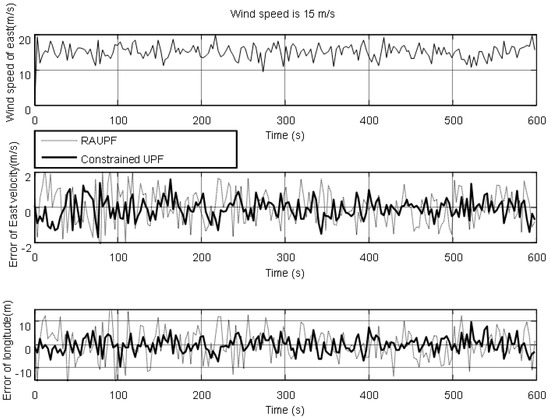
Figure 5.
East velocity and longitude errors under the wind speed of 15 m/s.
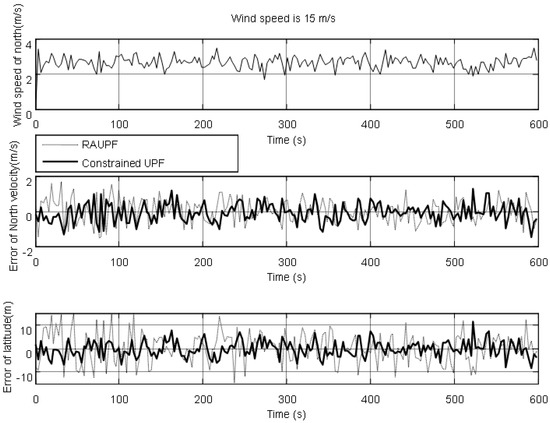
Figure 6.
North velocity and latitude errors under the wind speed of 15 m/s.
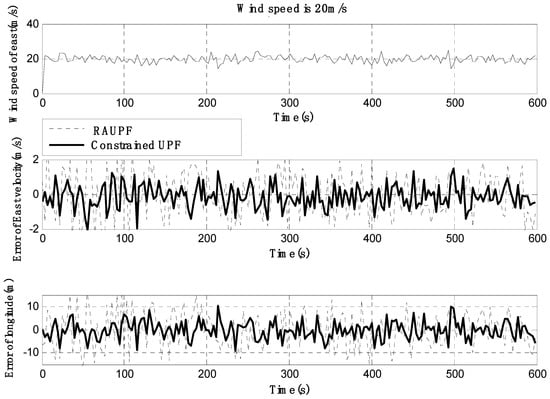
Figure 7.
East velocity and longitude errors under the wind speed of 20 m/s.
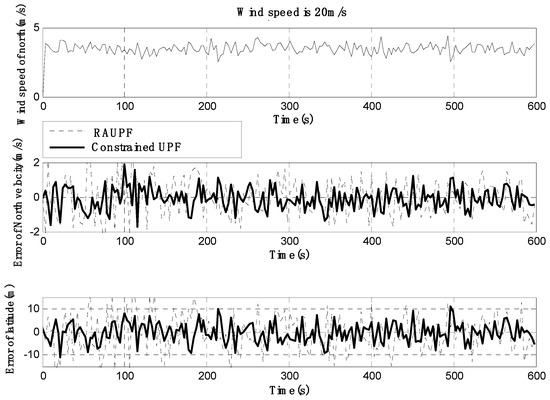
Figure 8.
North velocity and latitude errors under the wind speed of 20 m/s.

Table 1.
Mean errors of velocity and position under the wind speed of 10 m/s.
Table 2.
Mean errors of velocity and position under the wind speed of 15 m/s.
Table 3.
Mean errors of velocity and position under the wind speed of 20 m/s.
It is also observed that the latitude and North velocity errors are smaller than the longitude and East velocity for RAUPF. The reason is that the gust wind is in the North by East 10° and thus its East velocity component is larger than its North velocity component, more greatly affecting the East velocity and longitude of the airship. However, the constrained UPF does not suffer from such an effect caused by the wind field disturbance. The North velocity and latitude are in the similar accuracy as the East velocity and longitude, without any obvious disturbance by the wind field. This demonstrates that the proposed constrained UPF is able to resist the disturbance of wind field.
In addition, only a slight change in the accuracy of the constrained UPF was observed due to the increase of wind speed. This means that the ability of the constrained UPF to suppress wind field disturbance becomes stronger with the increase of the wind speed.
Figure 9 and Figure 10 show the fitting curves for the horizontal velocity and position errors of the airship by both RAUPF and constrained UPF. It can be seen that the horizontal velocity and position errors obtained by RAUPF are linearly increased with the increase of the wind speed. This demonstrates that RAUPF lacks the capability to resist the wind disturbance. In contrast, the slopes of the fitting curves of the horizontal velocity and position errors by the constrained UPF are decreased, demonstrating that the larger the wind speed is the stronger UPF’s resistance to the wind disturbance.
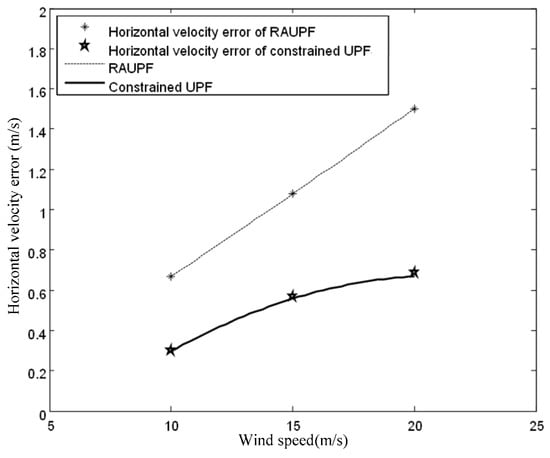
Figure 9.
Horizontal velocity errors for both RAUPF and constrained UPF.
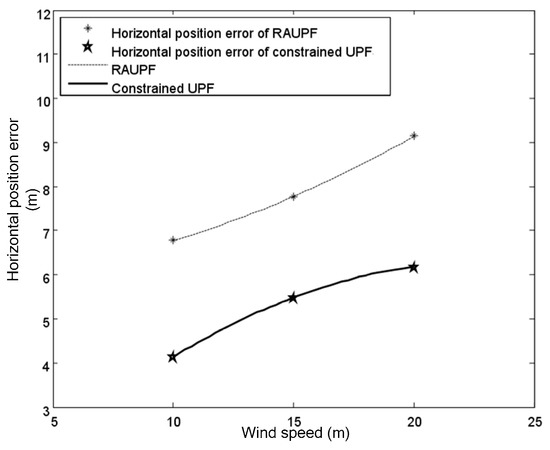
Figure 10.
Horizontal position errors for both RAUPF and constrained UPF.
The above simulation results demonstrate that the proposed constrained UPF can effectively inhibit the disturbance of wind field, leading to improved positioning accuracy for SINS/GNSS/ADS integrated airship navigation in comparison with RAUPF.
5. Conclusions
This paper presents a new constrained UPF for SINS/GNSS/ADS integration to improve the performance of airship positioning and navigation under the disturbance of wind field. The contributions of this paper are that (i) the wind speed model and navigation mathematical model are established for SINS/GNSS/ADS integration; and (ii) a constrained UPF is developed using the wind speed model as a constraint to fuse SINS and GNSS measurements to generate system state estimation for airship navigation based on SINS/GNSS/ADS integration, leading to the optimal state estimation in the presence of wind disturbance. Simulations and comparison analysis verify that the proposed constrained UPF can effectively inhibit the influence of wind field, leading to the improved accuracy comparing to EKF and ARUPF for SINS/GNSS/ADS integrated airship navigation in the presence of wind disturbance.
Future research work will focus on two aspects. One is the experimental evaluation of the proposed constrained UPF. Practical experiments on airship flight based on SINS/GNSS/ADS integrated navigation will be conducted to further evaluate the performance of the proposed algorithm. The other is on improvement of the proposed constrained UPF. The proposed algorithm will be combined with advanced artificial intelligence technologies such as pattern recognition, neural network, and advanced expert systems, thus establishing an intelligent algorithm to automatically deal with the disturbances of wind field for the airship navigation.
Author Contributions
Z.G. completed the theoretical research and design of the manuscript, including the principle and design of the filtering algorithm, and completed the writing of the manuscript. D.M. guided and supervised the research content and technical principle of the algorithm in the manuscript. Y.Z. reviewed the verification scheme and the writing of the manuscript. C.G. summarized the vertification results, including data collection and chart drawing.
Funding
The work of this paper was supported by the Fundamental Research Funds for the Central Universities (Project Number. 3102018zy027), the Doctoral Dissertation Innovation Foundation of Northwestern Polytechnical University, China (Project Number: CX201834), and the Training Foundation for Excellent Doctoral Students of Northwestern Polytechnical University, China.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Proof of Lemma 1
Proof.
The prior distribution and the posterior distribution of state are
According to the prediction of Bayes recursions, we have
It can be easily seen from (59) that for any function ,
Appendix B. Proof of Lemma 2
Proof.
According to Lemma 1, we have
Then,
Since , we can obtain
Appendix C. Proof of Lemma 3
Proof.
According to the updating process of Bayes recursion, we have
It is easily to see from (62) that for any function ,
Appendix D. Proof of Theorem 1
Proof.
By Lemmas 1–3, we have
where,
Using Minkowski’s inequality, we can obtain
Letting yields
Thus, if there exists a probability density to approximate posterior density , we can find proposal distribution to approximate posterior density .
References
- Scaife, A.; Karpechko, A.Y.; Baldwin, M.P.; Brookshaw, A.; Butler, A.H.; Eade, R.; Gordon, M.; MacLachlan, C.; Martin, N.; Dunstone, N.; et al. Seasonal winter forecasts and the stratosphere. Atmos. Sci. Lett. 2016, 17, 51–56. [Google Scholar] [CrossRef]
- Green, J.; Gage, K. Observations of stable layers in the troposphere and stratosphere using VHF radar. Radio Sci. 2016, 15, 395–405. [Google Scholar] [CrossRef]
- Jakub, J.; Bronislav, K.; Jiří Pospíšil, C. Autonomous airship equipped by multi-sensor mapping platform. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 5, 119–124. [Google Scholar]
- Hu, G.G.; Wang, W.; Zhong, Y.M.; Gao, B.B.; Gu, C.F. A new direct filtering approach to INS/GNSS integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- Gao, B.B.; Hu, G.G.; Gao, S.S.; Zhong, Y.; Gu, C.F. Multi-sensor optimal data fusion for INS/GNSS/CNS integration based on unscented kalman filter. Int. J. Control Autom. Syst. 2018, 16, 129–140. [Google Scholar] [CrossRef]
- Gao, S.S.; Zhong, Y.; Zhang, X.; Shirinzadeh, B. Multi-sensor optimal data fusion for INS/GPS/SAR integrated navigation system. Aerosp. Sci. Technol. 2009, 13, 232–237. [Google Scholar] [CrossRef]
- Hu, G.G.; Gao, S.S.; Zhong, Y.M. A derivative UKF for tightly coupled INS/GPS integrated navigation. ISA Trans. 2015, 56, 135–144. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Modeling the stochastic drift of a MEMS-based gyroscope in gyro/odometer/GPS integrated navigation. IEEE Trans. Intell. Transp. Syst. 2010, 11, 856–872. [Google Scholar] [CrossRef]
- Almagbile, A.; Wang, J.; Ding, W. Evaluating the performances of adaptive Kalman filter methods in GPS/INS integration. J. Glob. Position. Syst. 2010, 9, 33–40. [Google Scholar] [CrossRef]
- Li, S.; Mei, J.; Qu, Q.; Sun, K. Research on SINS/GPS/CNS fault-tolerant integrated navigation system with air data system assistance. In Proceedings of the IEEE Guidance, Navigation and Control Conference, Nanjing, China, 12–14 August 2016; pp. 2366–2370. [Google Scholar]
- Soldatkin, V.; Nikitin, A. Construction and algorithms of a helicopter air data system with aerometric and ion-tagging measurement channels. Russ. Aeronaut. 2017, 60, 447–453. [Google Scholar] [CrossRef]
- Madhavanpillai, J.; Dhoaya, J.; Balakrishnan, V.S.; Narayanan, R.; Chacko, F.K.; Narayanan, S.M. Inverse flush air data system (FADS) for real time simulations. J. Inst. Eng. 2017, 98, 1–9. [Google Scholar] [CrossRef]
- Di, Y.; Wu, S.; Zhou, Y. Research on flight altitude information fusion method for ADS/INS/GPS integrated systems based on federated filter. Appl. Mech. Mater. 2014, 4, 599–601. [Google Scholar] [CrossRef]
- Gao, B.B.; Hu, G.G.; Gao, S.S.; Zhong, Y.; Gu, C.F. Multi-sensor optimal data fusion based on the adaptive fading unscented kalman filter. Sensors 2018, 18, 488. [Google Scholar] [CrossRef]
- Hu, H.; Huang, X. SINS/CNS/GPS integrated navigation algorithm based on UKF. J. Syst. Eng. Electron. 2010, 21, 102–109. [Google Scholar] [CrossRef]
- Soken, H.E.; Hajiyev, C. Pico satellite attitude estimation via robust unscented Kalman filter in the presence of measurement faults. ISA Trans. 2010, 49, 249–256. [Google Scholar] [CrossRef] [PubMed]
- Tao, L.; Yuan, G.; Wang, L. Particle filter with novel nonlinear error model for miniature gyroscope-based measurement while drilling navigation. Sensors 2016, 16, 371. [Google Scholar]
- Rigatos, G.G. Nonlinear kalman filters and particle filters for integrated navigation of unmanned aerial vehicles. Robotics Auton. Syst. 2012, 60, 978–995. [Google Scholar] [CrossRef]
- Doucet, A.; Freitas, N.D.; Gordon, N. Sequential Monte Carlo Methods in Practice; Springer: Berlin, Germany, 2001. [Google Scholar]
- Ming, Q.; Jo, K.H. A novel particle filter implementation for a multiple-vehicle detection and tracking system using tail light segmentation. Int. J. Control Autom. Syst. 2013, 11, 577–585. [Google Scholar]
- Nordlund, P.J. Sequential Monte Carlo Filters and Integrated Navigation. Licentiate Thesis, Linköping University, Linköping, Sweden, 2002. [Google Scholar]
- Gao, B.B.; Gao, S.S.; Hu, G.G.; Zhong, Y.; Gu, C.F. Maximum likelihood principle and moving horizon estimation based adaptive unscented kalman filter. Aerosp. Sci. Technol. 2018, 73, 184–196. [Google Scholar] [CrossRef]
- Gao, B.B.; Gao, S.S.; Zhong, Y.; Hu, G.G.; Gu, C.F. Interacting multiple model estimation-based adaptive robust unscented kalman filter. Int. J. Control Autom. Syst. 2017, 15, 2013–2025. [Google Scholar] [CrossRef]
- Li, Y.; Sun, S.; Hao, G. A weighted measurement fusion particle filter for nonlinear multisensory systems based on Gauss-Hermite approximation. Sensors 2017, 17, 2222. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Chen, R.; Guo, D. Delayed-pilot sampling for mixture Kalman filter with application in fading channels. IEEE Trans. Signal Process. 2002, 50, 241–254. [Google Scholar] [CrossRef]
- Zhang, N.; Yang, X. Gaussian mixture unscented particle filter with adaptive residual resample for nonlinear model. In Proceedings of the International Conference on Intelligent Computing and Cognitive Informatics, Singapore, 8–9 September 2015; pp. 5–10. [Google Scholar]
- Andrieu, C.; Godsill, S.J. A particle filter for model based audio source separation. In Proceedings of the International Workshop Independent Component Analysis and Blind Signal Separation, Helsinki, Finland, 19–22 June 2000; pp. 381–386. [Google Scholar]
- Julier, S.J.; LaViola, J.J. On Kalman filtering with nonlinear equality constraints. IEEE Trans. Signal Process. 2007, 55, 2774–2784. [Google Scholar] [CrossRef]
- Xue, L.; Gao, S.S.; Zhong, Y.M. Robust adaptive unscented particle filter. Int. J. Intell. Mechatron. Robot. 2013, 3, 55–56. [Google Scholar] [CrossRef]
- Gao, Z.H.; Mu, D.J.; Zhong, Y.M.; Gu, C.F. A strap-down inertial navigation/spectrum red-shift/star sensor (SINS/SRS/SS) autonomous integrated system for spacecraft navigation. Sensors 2018, 18, 2039. [Google Scholar] [CrossRef] [PubMed]
- Palanthandalam-Madapusi, H.J.; Girard, A.; Bernstein, D.S. Wind-field reconstruction using flight data. In Proceedings of the IEEE American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 1863–1868. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).