Toward Creating a Subsurface Camera




Abstract
1. Introduction
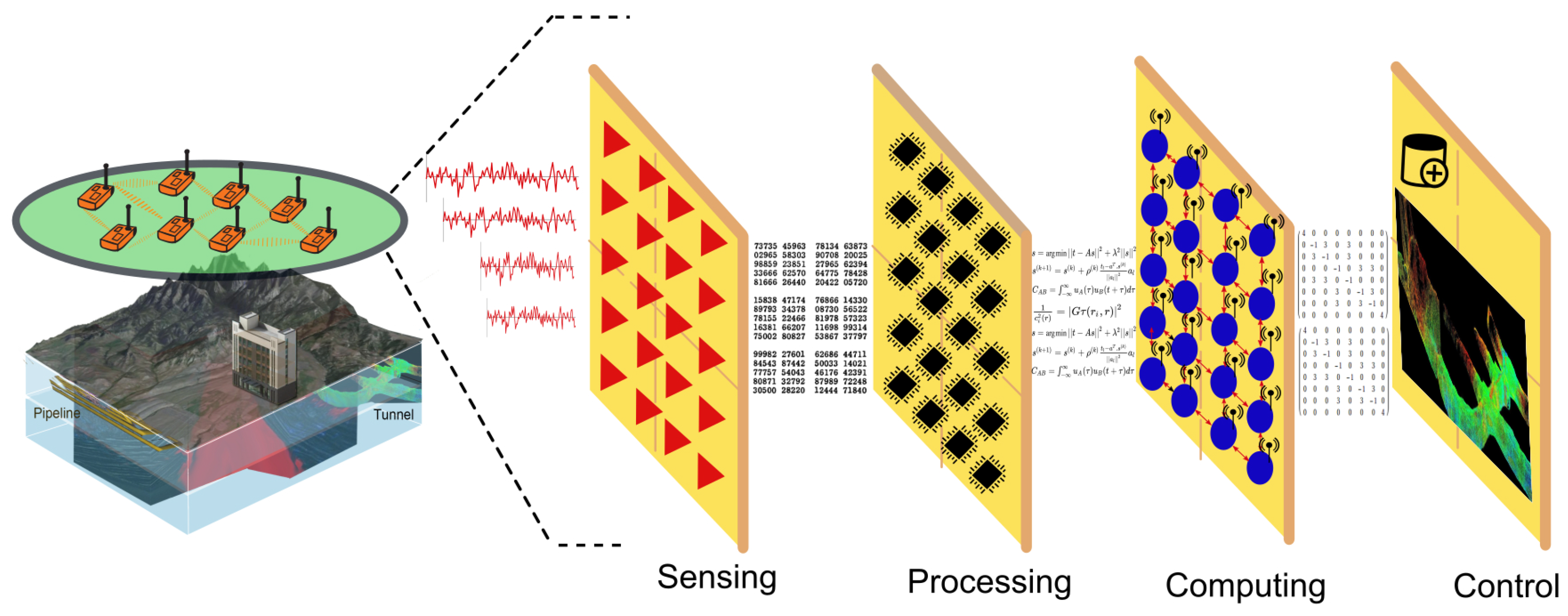
2. System Framework and Architecture
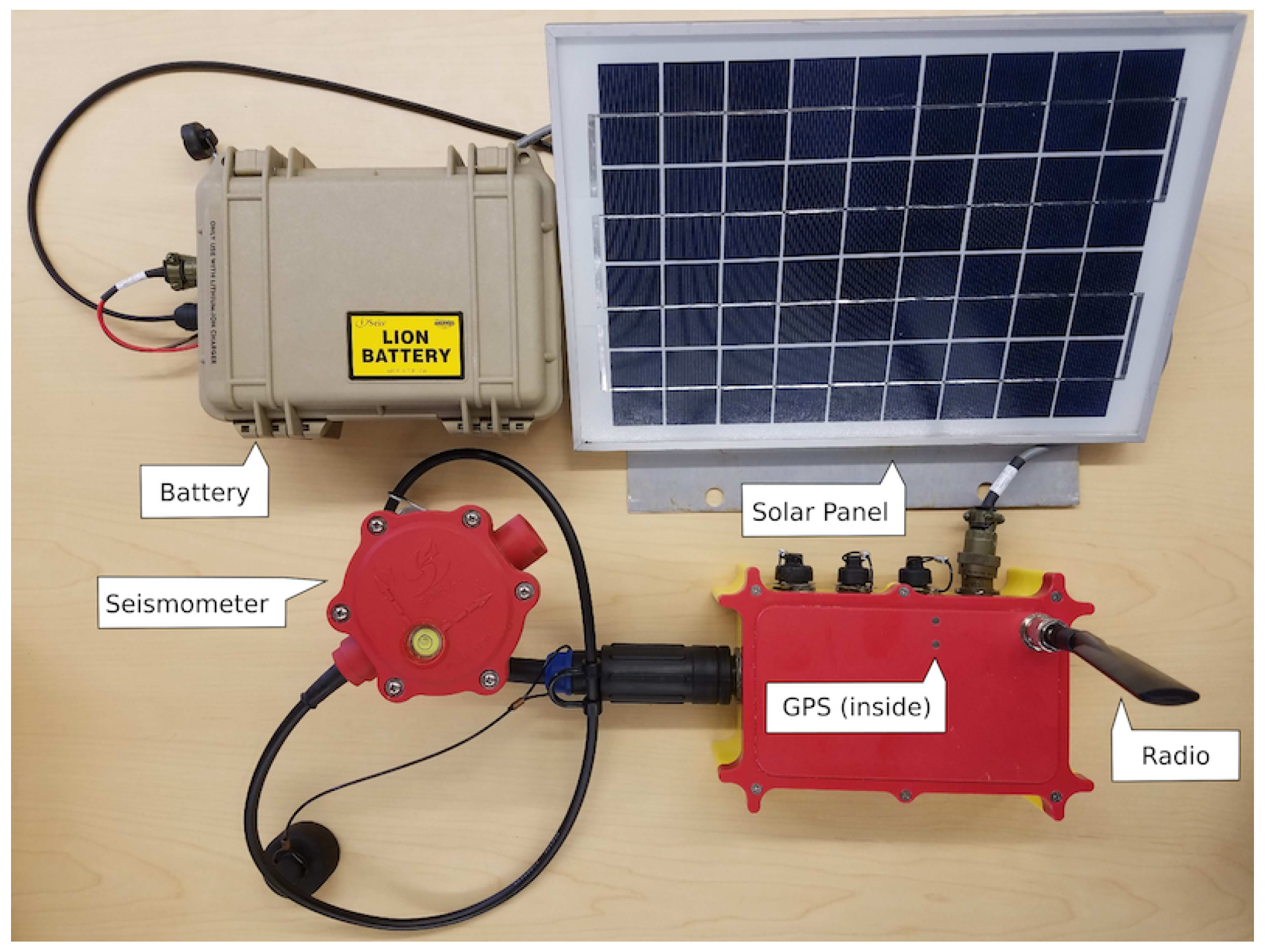
2.1. Sensing Layer and Hardware Platform
2.2. Processing Layer
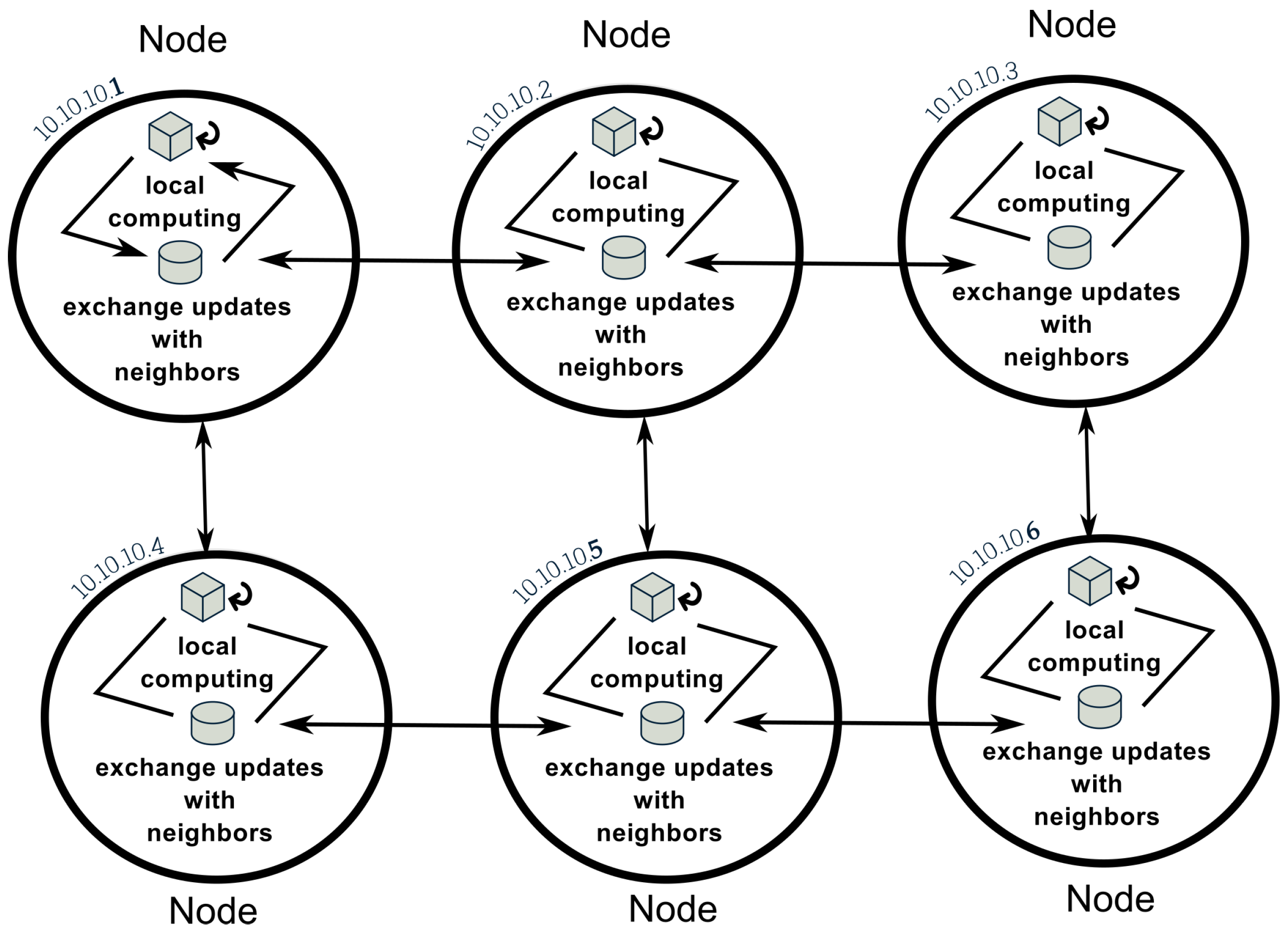
2.3. Computing Layer
2.4. Control Layer
3. System Prototype Design Examples
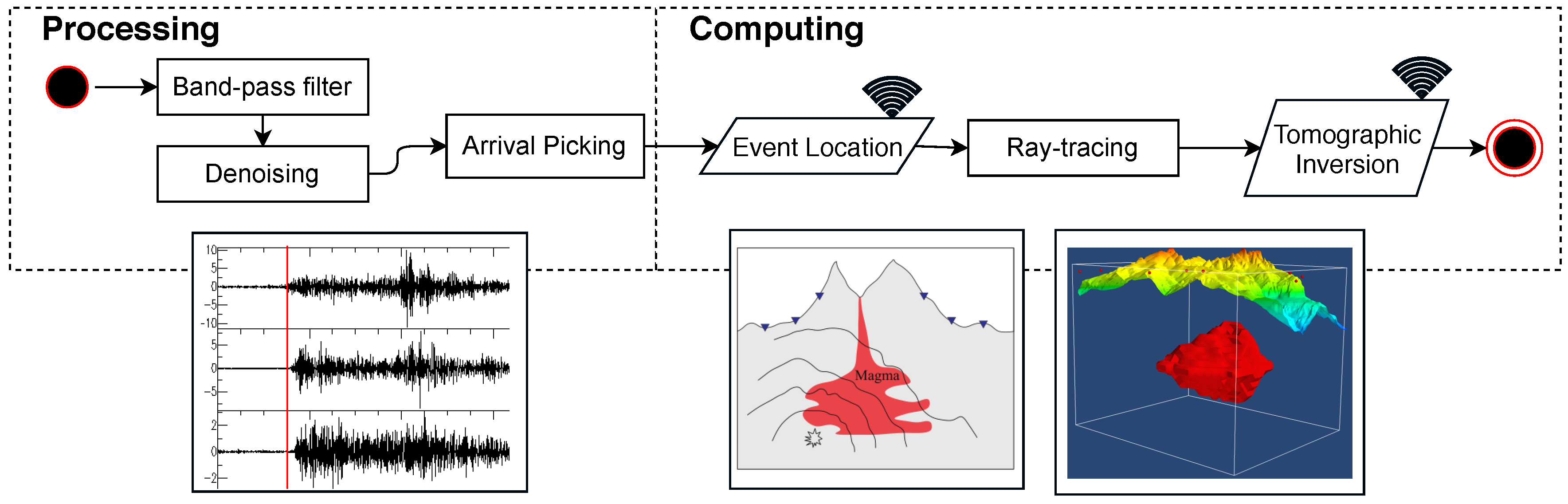
3.1. Travel-Time Seismic Tomography
3.1.1. Processing Layer
3.1.2. Computing Layer
3.1.3. Compute TomoTT in Sensor Networks
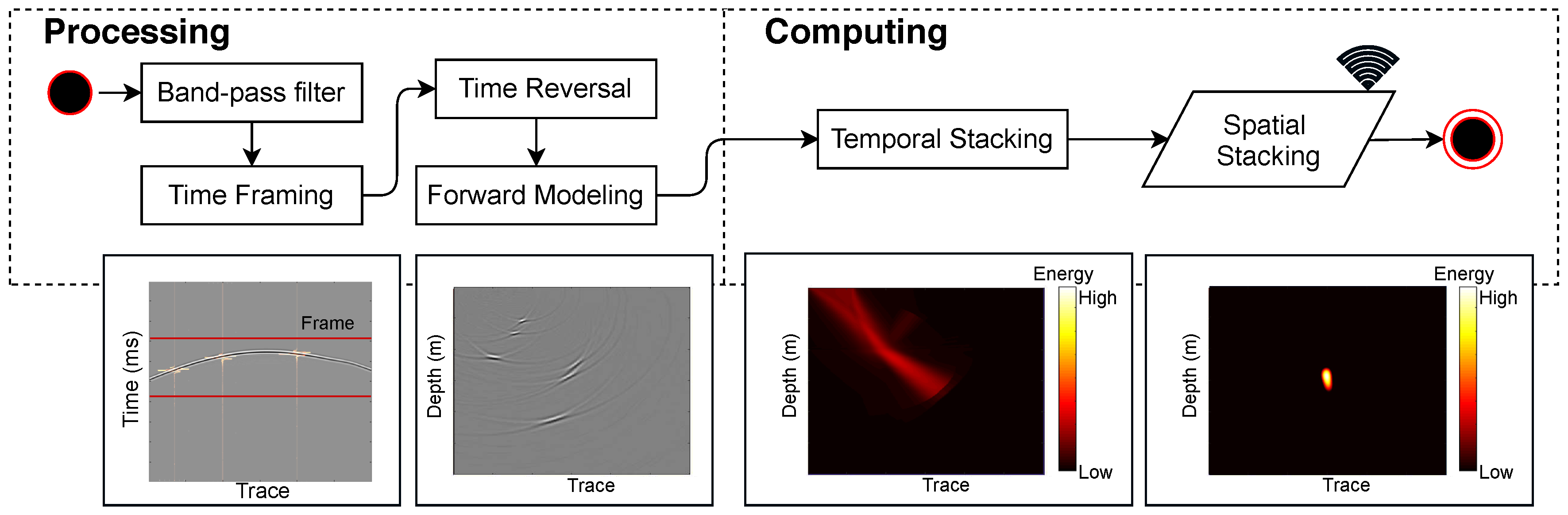
3.2. Migration-Based Microseismic Imaging
3.2.1. Processing Layer
3.2.2. Computing Layer
3.2.3. Compute MMI in Sensor Networks
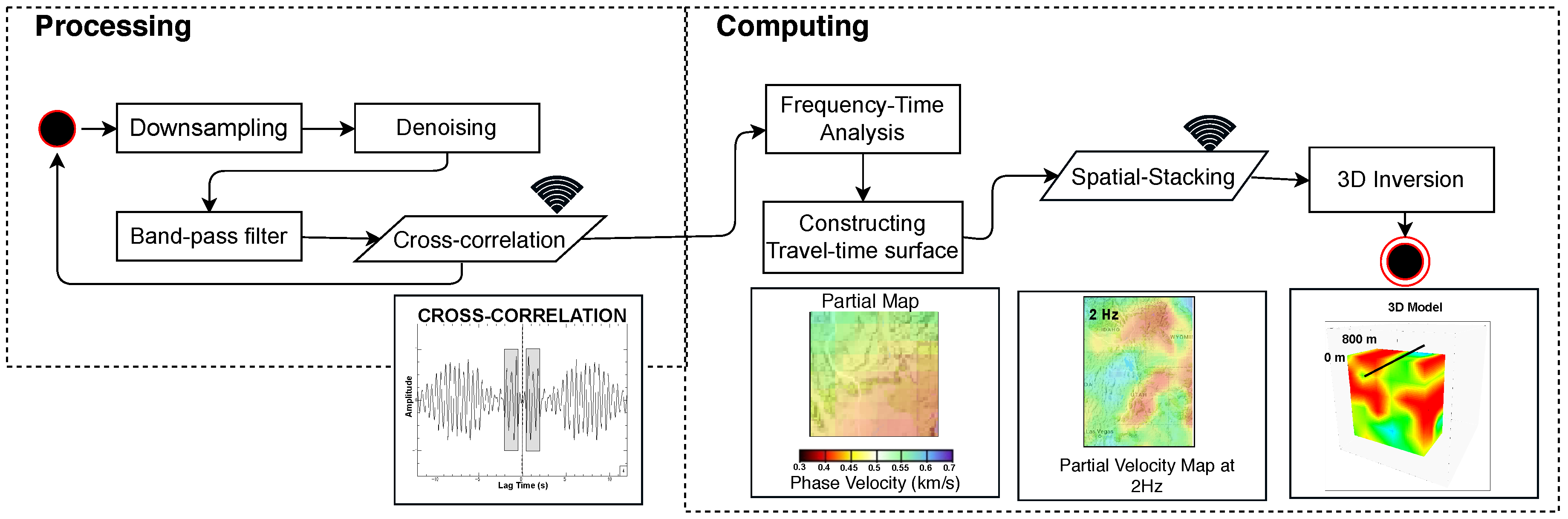
3.3. Ambient-Noise Seismic Imaging
3.3.1. Processing Layer
3.3.2. Computing Layer
3.3.3. Compute ANSI in Sensor Networks
4. Evaluation
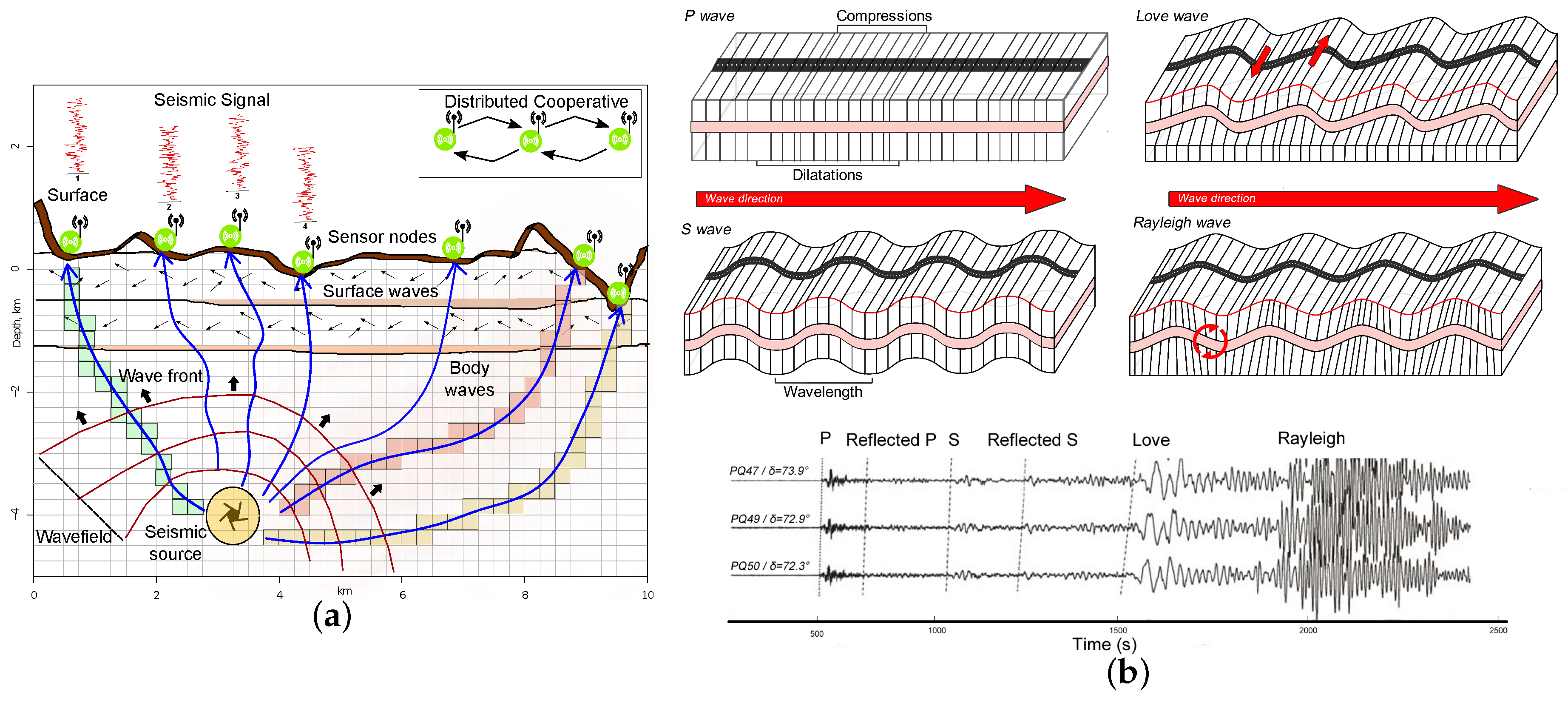
4.1. Sensing Layer
4.2. Processing Layer
4.3. Computing Layer
4.4. Remarks
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Warning, S.T. Earthquakes Seismic Waves. Available online: https://www.sms-tsunami-warning.com/pages/seismic-waves#.XDf1nGhKiiM (accessed on 14 December 2018).
- Wilde-Piórko, M.; Geissler, W.H.; Plomerová, J.; Grad, M.; Babuška, V.; Brückl, E.; Cyziene, J.; Czuba, W.; England, R.; Gaczyński, E.; et al. PASSEQ 2006–2008: Passive seismic experiment in Trans-European Suture Zone. Stud. Geophys. Geod. 2008, 52, 439–448. [Google Scholar] [CrossRef]
- Song, W.Z.; Huang, R.; Xu, M.; Shirazi, B.A.; LaHusen, R. Design and Deployment of Sensor Network for Real-Time High-Fidelity Volcano Monitoring. IEEE Trans. Parallel Distrib. Syst. 2010, 21, 1658–1674. [Google Scholar] [CrossRef]
- Huang, R.; Song, W.Z.; Xu, M.; Peterson, N.; Shirazi, B.; LaHusen, R. Real-World Sensor Network for Long-Term Volcano Monitoring: Design and Findings. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 321–329. [Google Scholar] [CrossRef]
- Upton, E. Raspberry Pi 3. Available online: https://www.raspberrypi.org/products/raspberry-pi-3-model-b (accessed on 14 December 2018).
- Helgerud, P.; Bragstad, H. Method for Synchronization of Systems for Seismic Surveys, Together With Applications of the Method. U.S. Patent 5,548,562, 20 August 1996. [Google Scholar]
- Antoniou, A. Digital Signal Processing; McGraw-Hill: New York, NY, USA, 2016. [Google Scholar]
- Maxwell, S. Microseismic Imaging of Hydraulic Fracturing: Improved Engineering of Unconventional Shale Reservoirs; Society of Exploration Geophysicists (SEG): Denver, CO, USA, 2014. [Google Scholar]
- Bensen, G.D.; Ritzwoller, M.H.; Barmin, M.P.; Levshin, A.L.; Lin, F.; Moschetti, M.P.; Shapiro, N.M.; Yang, Y. Processing seismic ambient noise data to obtain reliable broad-band surface wave dispersion measurements. Geophys. J. Int. 2007, 169, 1239–1260. [Google Scholar] [CrossRef]
- Douglas, A. Bandpass filtering to reduce noise on seismograms: Is there a better way? Bull. Seismol. Soc. Am. 1997, 87, 770–777. [Google Scholar]
- Li, F.; Song, W. Automatic arrival identification system for real-time microseismic event location. In SEG Technical Program Expanded Abstracts 2017; Society of Exploration Geophysicists (SEG): Houston, TX, USA, 2017. [Google Scholar]
- Du, Z.; Foulger, G.R.; Mao, W. Noise reduction for broad-band, three-component seismograms using data-adaptive polarization filters. Geophys. J. Int. 2000, 141, 820–828. [Google Scholar] [CrossRef]
- Nakata, N.; Chang, J.P.; Lawrence, J.F.; Boué, P. Body wave extraction and tomography at Long Beach, California, with ambient-noise interferometry. J. Geophys. Res. Solid Earth 2015, 120, 1159–1173. [Google Scholar] [CrossRef]
- Allen, R.V. Automatic earthquake recognition and timing from single traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar]
- Lin, F.; Ritzwoller, M.H.; Snieder, R. Eikonal tomography: surface wave tomography by phase front tracking across a regional broad-band seismic array. Geophys. J. Int. 2009, 177, 1091–1110. [Google Scholar] [CrossRef]
- Valero, M.; Li, F.; Wang, S.; Lin, F.C.; Song, W. Real-time Cooperative Analytics for Ambient Noise Tomography in Sensor Networks. IEEE Trans. Signal Inf. Process. Netw. 2018. [Google Scholar] [CrossRef]
- Cal’i, M.; Ambu, R. Advanced 3D Photogrammetric Surface Reconstruction of Extensive Objects by UAV Camera Image Acquisition. Sensors 2018, 18, 2815. [Google Scholar] [CrossRef] [PubMed]
- Song, W.; Shi, L.; Kamath, G.; Xie, Y.; Peng, Z. Real-time In-situ Seismic Imaging: Overview and Case Study. In Proceedings of the SEG Annual Meeting 2015, New Orleans, Louisiana, 18–23 October 2015. [Google Scholar] [CrossRef]
- Kamath, G.; Shi, L.; Song, W.Z.; Lees, J. Distributed Travel-time Seismic Tomography in Large-Scale Sensor Networks. J. Parallel Distrib. Comput. 2016, 89, 50–64. [Google Scholar] [CrossRef]
- Zhao, L.; Song, W.Z.; Shi, L.; Ye, X. Decentralized Seismic Tomography Computing In Cyber-Physical Sensor Systems. Cyber-Phys. Syst. 2015, 1, 91–112. [Google Scholar] [CrossRef]
- Kamath, G.; Shi, L.; Chow, E.; Song, W.Z. Distributed Tomography with Adaptive Mesh Refinement in Sensor Networks. Int. J. Sens. Netw. 2015, 23, 40–52. [Google Scholar] [CrossRef]
- Ramanan, P.; Kamath, G.; Song, W.Z. INDIGO: An In-Situ Distributed Gossip Framework for Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 706083. [Google Scholar] [CrossRef]
- Valero, M.; Kamath, G.; Clemente, J.; Lin, F.C.; Xie, Y.; Song, W. Real-time Ambient Noise Subsurface Imaging in Distributed Sensor Networks. In Proceedings of the 3rd IEEE International Conference on Smart Computing (SMARTCOMP 2017), Hong Kong, China, 29–31 May 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Shi, L.; Song, W.Z.; Dong, F.; Kamath, G. Sensor Network for Real-time In-situ Seismic Tomography. In Proceedings of the International Conference on Internet of Things and Big Data (IoTBD 2016), Rome, Italy, 23–25 April 2016. [Google Scholar] [CrossRef]
- Kamath, G.; Shi, L.; Song, W.Z. Component-Average based Distributed Seismic Tomography in Sensor Networks. In Proceedings of the 9th IEEE International Conference on Distributed Computing in Sensor Systems (IEEE DCOSS), Cambridge, MA, USA, 20–23 May 2013; pp. 88–95. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Wu, T.; Yuan, K.; Ling, Q.; Yin, W.; Sayed, A.H. Decentralized consensus optimization with asynchrony and delay. In Proceedings of the IEEE Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 6–9 November 2016. [Google Scholar]
- Aysal, T.C.; Yildiz, M.E.; Sarwate, A.D.; Scaglione, A. Broadcast Gossip Algorithms for Consensus. IEEE Trans. Signal Process. 2009, 57, 2748–2761. [Google Scholar] [CrossRef]
- Matei, I.; Baras, J.S. Performance Evaluation of the Consensus-Based Distributed Subgradient Method Under Random Communication Topologies. Sel. Top. Signal Process. IEEE J. 2011, 5, 754–771. [Google Scholar] [CrossRef]
- Nedic, A.; Ozdaglar, A. Distributed Subgradient Methods for Multi-Agent Optimization. Autom. Control IEEE Trans. 2009, 54, 48–61. [Google Scholar] [CrossRef]
- Yuan, K.; Ling, Q.; Yin, W. On the convergence of decentralized gradient descent. arXiv, 2013; arXiv:1310.7063. [Google Scholar]
- Chen, A.I.A. Fast Distributed First-Order Methods. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2012. [Google Scholar]
- Xiao, L.; Boyd, S.; Lall, S. A Scheme for Robust Distributed Sensor Fusion Based on Average Consensus. In Proceedings of the 4th International Symposium on Information Processing in Sensor Networks, Los Angeles, CA, USA, 24–27 April 2005. [Google Scholar]
- Tsitsiklis, J.N.; Bertsekas, D.P.; Athans, M. Distributed asynchronous deterministic and stochastic gradient optimization algorithms. Autom. Control IEEE Trans. 1986, 31, 803–812. [Google Scholar] [CrossRef]
- Terelius, H.; Topcu, U.; Murray, R. Decentralized multi-agent optimization via dual decomposition. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011. [Google Scholar]
- Rabbat, M.; Nowak, R. Distributed optimization in sensor networks. In Proceedings of the Third International Symposium on Information Processing in Sensor Networks, 2004 (IPSN 2004), Berkeley, CA, USA, 26–27 April 2004; pp. 20–27. [Google Scholar] [CrossRef]
- Dusan Jakovetic, J.M. Fast Distributed Gradient Methods. arXiv, 2014; arXiv:1112.2972v4. [Google Scholar]
- Iutzeler, F.; Bianchi, P.; Ciblat, P.; Hachem, W. Asynchronous Distributed Optimization using a Randomized Alternating Direction Method of Multipliers. arXiv, 2013; arXiv:1303.2837. [Google Scholar]
- Nedic, A. Asynchronous Broadcast-Based Convex Optimization Over a Network. IEEE Trans. Autom. Control 2011, 56, 1337–1351. [Google Scholar] [CrossRef]
- Zhao, L.; Song, W.Z.; Ye, X.; Gu, Y. Asynchronous Broadcast-based Decentralized Learning in Sensor Networks. Int. J. Parallel Emerg. Distrib. Syst. 2018, 33, 589–607. [Google Scholar] [CrossRef]
- Wong, J.; Han, L.; Bancroft, J.; Stewart, R. Automatic Time-Picking of First Arrivals on Noisy Microseismic Data. Available online: https://www.crewes.org/ForOurSponsors/ConferenceAbstracts/2009/CSEG/Wong_CSEG_2009.pdf (accessed on 14 December 2018).
- Baer, M.; Kradolfer, U. An automatic phase picker for local and teleseismic events. Bull. Seismol. Soc. Am. 1987, 77, 1437–1445. [Google Scholar]
- Takanami, T.; Kitagawa, G. Estimation of the arrival times of seismic waves by multivariate time series model. Ann. Inst. Stat. Math. 1991, 43, 407–433. [Google Scholar] [CrossRef]
- Anant, K.S.; Dowla, F.U. Wavelet transform methods for phase identification in three-component seismograms. Bull. Seismol. Soc. Am. 1997, 87, 1598–1612. [Google Scholar]
- Molyneux, J.B.; Schmitt, D.R. First-break timing: Arrival onset times by direct correlation. Geophysics 1999, 64, 1492–1501. [Google Scholar] [CrossRef]
- Li, F.; Rich, J.; Marfurt, K.J.; Zhou, H. Automatic event detection on noisy microseismograms. In SEG Technical Program Expanded Abstracts 2014; Society of Exploration Geophysicists (SEG): Denver, CO, USA, 2014; pp. 2363–2367. [Google Scholar]
- Akram, J.; Eaton, D.W. A review and appraisal of arrival-time picking methods for downhole microseismic dataArrival-time picking methods. Geophysics 2016, 81, KS71–KS91. [Google Scholar] [CrossRef]
- Li, S.; Cao, Y.; Leamon, C.; Xie, Y.; Shi, L.; Song, W. Online seismic event picking via sequential change-point detection. In Proceedings of the 2016 54th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 27–30 September 2016; pp. 774–779. [Google Scholar] [CrossRef]
- Baillard, C.; Crawford, W.C.; Ballu, V.; Hibert, C.; Mangeney, A. An automatic kurtosis-based P-and S-phase picker designed for local seismic networks. Bull. Seismol. Soc. Am. 2014, 104, 394–409. [Google Scholar] [CrossRef]
- Lees, J.M.; Crosson, R.S. Bayesian Art versus Conjugate Gradientf Methods in Tomographic Seismic Imaging: An Application at Mount St. Helens, Washington. Lecture Notes-Monogr. Ser. 1991, 20, 186–208. [Google Scholar]
- Butrylo, B.; Tudruj, M.; Masko, L. Distributed Formulation of Artificial Reconstruction Technique with Reordering of Critical Data Sets. In Proceedings of the Fifth International Symposium on Parallel and Distributed Computing, 2006. ISPDC’06, Timisoara, Romania, 6–9 July 2006; pp. 90–98. [Google Scholar]
- Zhang, H.; Thurber, C. Development and applications of double-difference seismic tomography. Pure Appl. Geophys. 2006, 163, 373–403. [Google Scholar] [CrossRef]
- Shi, L.; Song, W.Z.; Xu, M.; Xiao, Q.; Lees, J.M.; Xing, G. Imaging Volcano Seismic Tomography in Sensor Networks. In Proceedings of the 10th Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks (IEEE SECON), New Orleans, LA, USA, 24–27 June 2013. [Google Scholar]
- Gordon, D.; Gordon, R. Component-averaged row projections: A robust, block-parallel scheme for sparse linear systems. SIAM J. Sci. Comput. 2005, 27, 1092–1117. [Google Scholar] [CrossRef]
- Censor, Y.; Gordon, D.; Gordon, R. Component averaging: An efficient iterative parallel algorithm for large and sparse unstructured problems. Parallel Comput. 2001, 27, 777–808. [Google Scholar] [CrossRef]
- Zhao, L.; Song, W.Z.; Ye, X. Fast Decentralized Gradient Descent Method and Applications to In-situ Seismic Tomography. In Proceedings of the IEEE International Conference on Big Data (IEEE BigData 2015), Santa Clara, CA, USA, 29 October–1 November 2015; pp. 908–917. [Google Scholar] [CrossRef]
- Artman, B. Imaging passive seismic data. Geophysics 2006, 71, SI177–SI187. [Google Scholar] [CrossRef]
- Wong, M.; Biondi, B.L.; Ronen, S. Imaging with primaries and free-surface multiples by joint least-squares reverse time migration. Geophysics 2015, 80, S223–S235. [Google Scholar] [CrossRef]
- Sun, J.; Zhu, T.; Fomel, S.; Song, W.Z. Investigating the possibility of locating microseismic sources using distributed sensor networks. In SEG Technical Program Expanded Abstracts 2015; Society of Exploration Geophysicists (SEG): New Orleans, LA, USA, 2015; pp. 2485–2490. [Google Scholar]
- Nakata, N.; Beroza, G.C. Reverse time migration for microseismic sources using the geometric mean as an imaging condition. Geophysics 2016, 81, KS51–KS60. [Google Scholar] [CrossRef]
- Wu, S.; Wang, Y.; Zheng, Y.; Chang, X. Microseismic source locations with deconvolution migration. Geophys. J. Int. 2017, 212, 2088–2115. [Google Scholar] [CrossRef]
- Kao, H.; Shan, S.J. The Source-Scanning Algorithm: mapping the distribution of seismic sources in time and space. Geophys. J. Int. 2004, 157, 589–594. [Google Scholar] [CrossRef]
- Gajewski, D.; Tessmer, E. Reverse modelling for seismic event characterization. Geophys. J. Int. 2005, 163, 276–284. [Google Scholar] [CrossRef]
- Witten, B.; Artman, B. Signal-to-noise estimates of time-reverse images. Geophysics 2011, 76, MA1–MA10. [Google Scholar] [CrossRef]
- Kremers, S.; Fichtner, A.; Brietzke, G.B.; Igel, H.; Larmat, C.; Huang, L.; Käser, M. Exploring the potentials and limitations of the time-reversal imaging of finite seismic sources. Solid Earth 2011, 2, 95–105. [Google Scholar] [CrossRef]
- Yavuz, M.E.; Teixeira, F.L. Space–frequency ultrawideband time-reversal imaging. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1115–1124. [Google Scholar] [CrossRef]
- Yang, H.; Li, T.; Li, N.; He, Z.; Liu, Q.H. Time-gating-based time reversal imaging for impulse borehole radar in layered media. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2695–2705. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, S.; Bleistein, N.; Zhang, G. True-amplitude, angle-domain, common-image gathers from one-way wave-equation migrations. Geophysics 2007, 72, S49–S58. [Google Scholar] [CrossRef]
- Claerbout, J.F. Imaging the Earth’s Interior; Blackwell Scientific Publications: Oxford, UK, 1985; Volume 1. [Google Scholar]
- Araya-Polo, M.; Cabezas, J.; Hanzich, M.; Pericas, M.; Rubio, F.; Gelado, I.; Shafiq, M.; Morancho, E.; Navarro, N.; Ayguade, E.; et al. Assessing accelerator-based HPC reverse time migration. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 147–162. [Google Scholar] [CrossRef]
- Liu, H.; Long, Z.; Tian, B.; Han, F.; Fang, G.; Liu, Q.H. Two-Dimensional Reverse-Time Migration Applied to GPR With a 3-D-to-2-D Data Conversion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4313–4320. [Google Scholar] [CrossRef]
- Schuster, G.T.; Yu, J.; Sheng, J.; Rickett, J. Interferometric/daylight seismic imaging. Geophys.J. Int. 2004, 157, 838–852. [Google Scholar] [CrossRef]
- Witten, B.; Shragge, J. Extended wave-equation imaging conditions for passive seismic data. Geophysics 2015, 80, WC61–WC72. [Google Scholar] [CrossRef]
- Rentsch, S.; Buske, S.; Lth, S.; Shapiro, S.A. Location of seismicity using Gaussian beam type migration. In Proceedings of the 2004 SEG Annual Meeting, Denver, CO, USA, 10–15 October 2004. [Google Scholar]
- Wang, S.; Li, F.; Song, W. Microseismic Source Location with Distributed Reverse Time Migration. Available online: http://sensorweb.engr.uga.edu/wp-content/uploads/2018/06/Dropbox_wang2018microseismic.pdf (accessed on 14 December 2018).
- Lin, F.; Moschetti, M.P.; Ritzwoller, M.H. Surface wave tomography of the western United States from ambient seismic noise : Rayleigh and Love wave phase velocity maps. Geophys. J. Int. 2008, 173, 281–298. [Google Scholar] [CrossRef]
- Moschetti, M.P.; Ritzwoller, M.H.; Lin, F.; Yang, Y. Crustal shear wave velocity structure of the western United States inferred from ambient seismic noise and earthquake data. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Lin, F.C.; Ritzwoller, M.H.; Yang, Y.; Moschetti, M.P.; Fouch, M.J. Complex and variable crustal and uppermost mantle seismic anisotropy in the western United States. Nat. Geosci. 2011, 4, 55–61. [Google Scholar] [CrossRef]
- Roux, P.; Sabra, K.G.; Gerstoft, P.; Kuperman, W.A.; Fehler, M.C. P-waves from cross-correlation of seismic noise. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Snieder, R. Extracting the Green’s function from the correlation of coda waves: A derivation based on stationary phase. Phys. Rev. E 2004, 69, 046610. [Google Scholar] [CrossRef] [PubMed]
- Shapiro, N.M.; Campillo, M.; Stehly, L.; Ritzwoller, M.H. High resolution surface wave tomography from ambient seismic noise. Science 2005, 307, 1615–1618. [Google Scholar] [CrossRef] [PubMed]
- Gouedard, P.; Roux, P.; Campillo, M. Small Scale seismic inversion using surface waves extracted from noise cross-correlation. J. Acoust. Soc. Am. 2008, 123, 26–31. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. A theory of the origin of microseisms. Phil. Trans. R. Soc. Lond. A 1950, 243, 1–35. [Google Scholar] [CrossRef]
- Picozzi, M.; Parolai, S.; Bindi, D.; Strollo. Characterization of shallow geology by high-frequency seismic noise tomography. Geophys. J. Int. 2009, 176, 164–174. [Google Scholar] [CrossRef]
- Yang, Y.; Ritzwoller, M.H.; Jones, C.H. Crustal structure determined from ambient noise tomography near the magmatic centers of the Coso region, southeastern California. Geochem. Geophys. Geosyst. 2011, 12. [Google Scholar] [CrossRef]
- Lin, F.; Li, D.; Clayton, R.W.; Hollis, D. High-resolution 3D shallow crustal structure in Long Beach, California: Application of ambient noise tomography on a dense seismic array. Geophysics 2013, 78, Q45–Q56. [Google Scholar] [CrossRef]
- Lobkis, O.I.; Weaver, R.L. On the emergence of the Green’s function in the correlations of a diffuse field. J. Acoust. Soc. Am. 2001, 110, 3011. [Google Scholar] [CrossRef]
- Lin, F.; Ritzwoller, M.H. Helmholtz surface wave tomography for isotropic and azimuthally anisotropic structure. Geophys. J. Int. 2011, 186, 1104–1120. [Google Scholar] [CrossRef]
- Valero, M.; Li, F.; Li, X.; Song, W. Imaging Subsurface Civil Infrastructure with Smart Seismic Network. In Proceedings of the 37th IEEE International Performance Computing and Communications Conference (IPCCC) 2018, Orlando, FL, USA, 17–19 November 2018. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Raspberry Pi 3 Model B | |
|---|---|
| CPU | 1.2 GHz 64-bit quad-core ARMv8 |
| Memory | 1 GB SDRAM |
| USB 2.0 ports | 4 (via the on-board 5-port USB hub) |
| On-board storage | 32 Gb Micro SDHC |
| On-board network | 10/100 Mbit/s Ethernet, 802.11n wireless, Bluetooth 4.1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, W.; Li, F.; Valero, M.; Zhao, L. Toward Creating a Subsurface Camera. Sensors 2019, 19, 301. https://doi.org/10.3390/s19020301
Song W, Li F, Valero M, Zhao L. Toward Creating a Subsurface Camera. Sensors. 2019; 19(2):301. https://doi.org/10.3390/s19020301
Chicago/Turabian StyleSong, Wenzhan, Fangyu Li, Maria Valero, and Liang Zhao. 2019. "Toward Creating a Subsurface Camera" Sensors 19, no. 2: 301. https://doi.org/10.3390/s19020301
APA StyleSong, W., Li, F., Valero, M., & Zhao, L. (2019). Toward Creating a Subsurface Camera. Sensors, 19(2), 301. https://doi.org/10.3390/s19020301