GAM-Based Mooring Alignment for SINS Based on An Improved CEEMD Denoising Method


Abstract
1. Introduction
2. Alignment Algorithm Based on GAM and Simulation
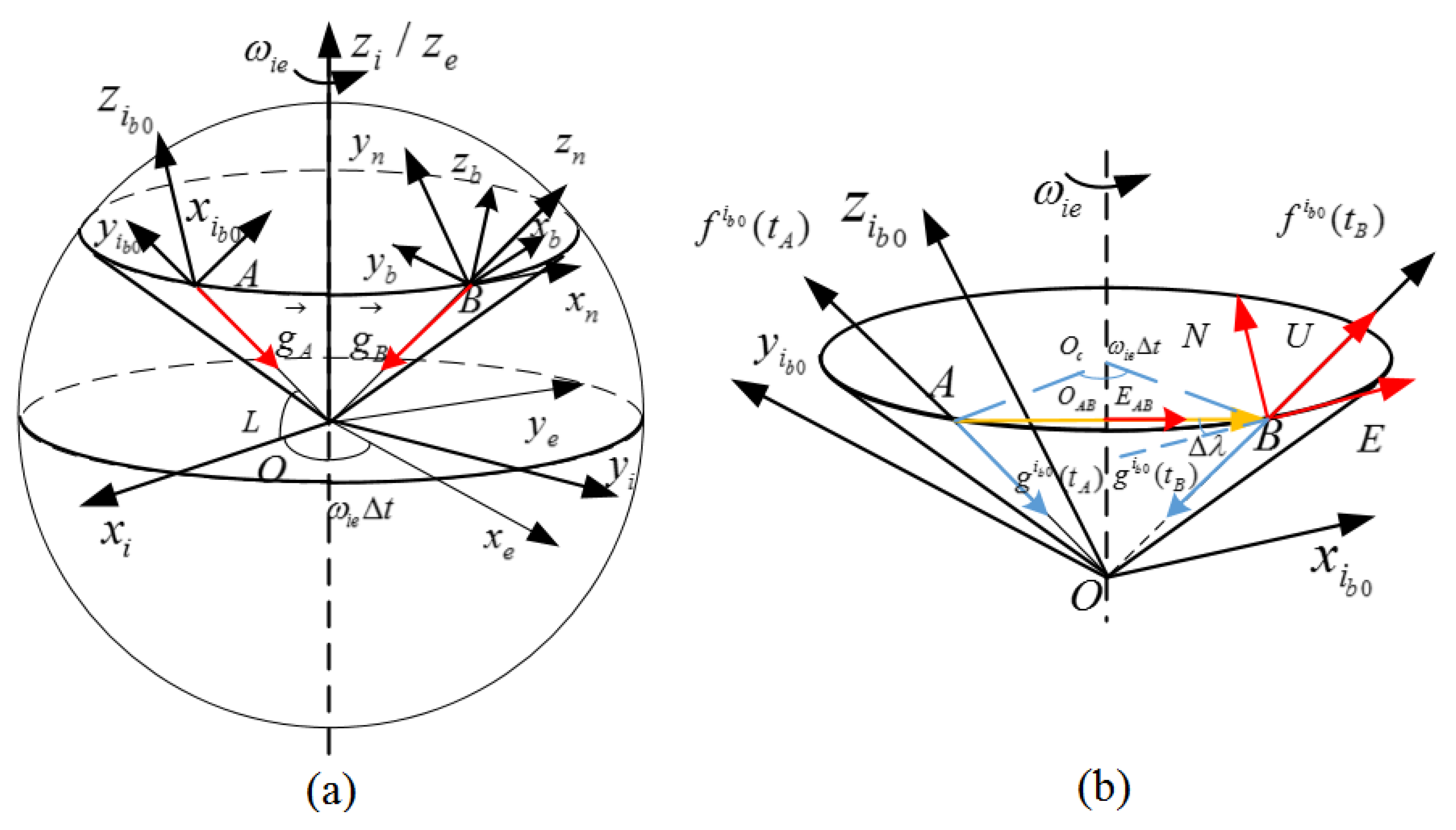
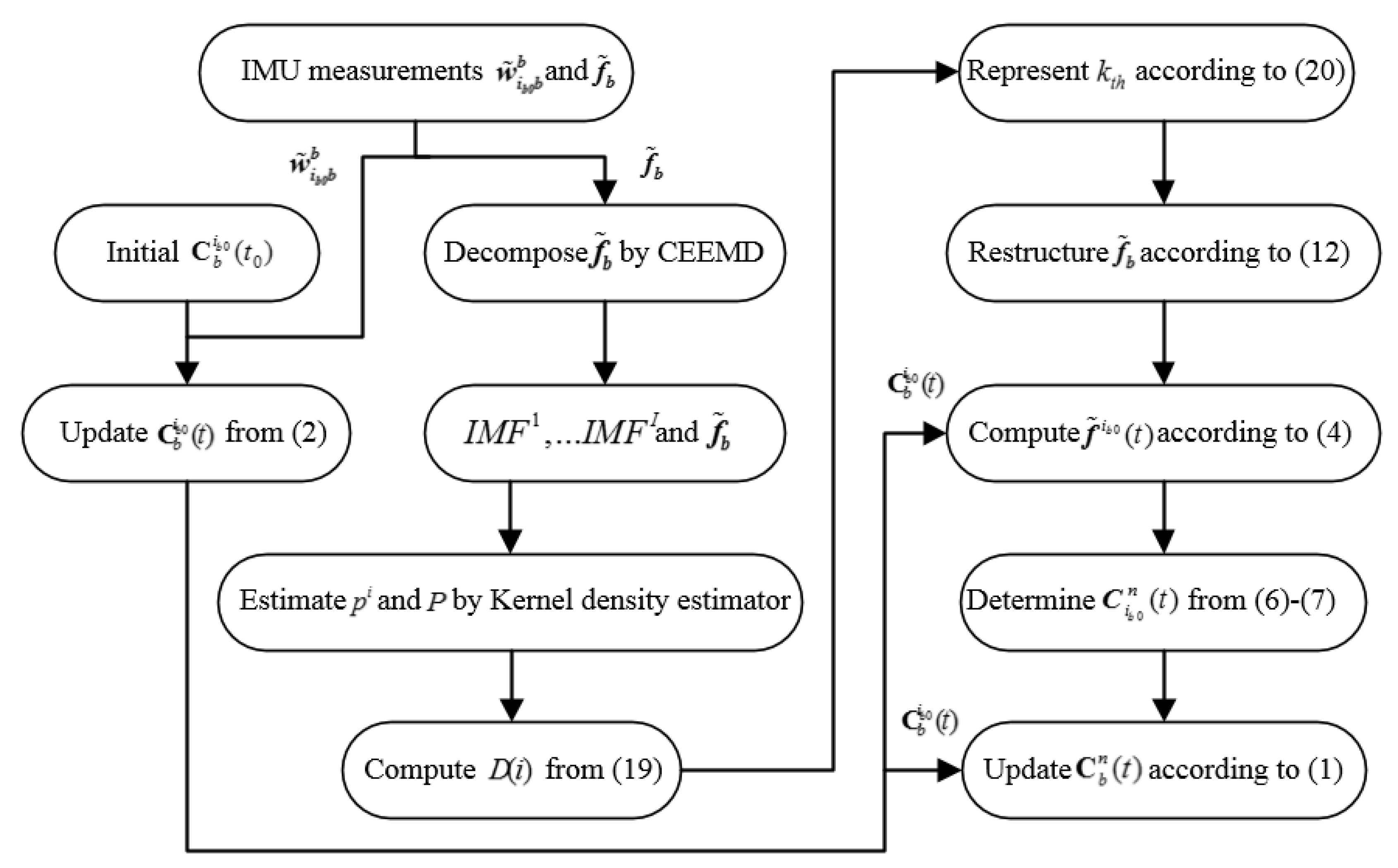
2.1. An Initial Alignment Method Based on GAM
2.2. Simulation
3. Improved Method Based on CEEMD
3.1. A Brief Review of the CEEMD Method
- Generate reconstructed y according to Equation (10).
- Decompose completely and by EMD, obtaining and derived from and , respectively, where i is the number of IMFs.
- Compute the mode of by averaging the corresponding modes: .
- The original signal is eventually decomposed into multiple IMFs and residual signal by CEEMD: .
3.2. Improved CEEMD Denoising Method Based on the -Norm Measure between the PDFs
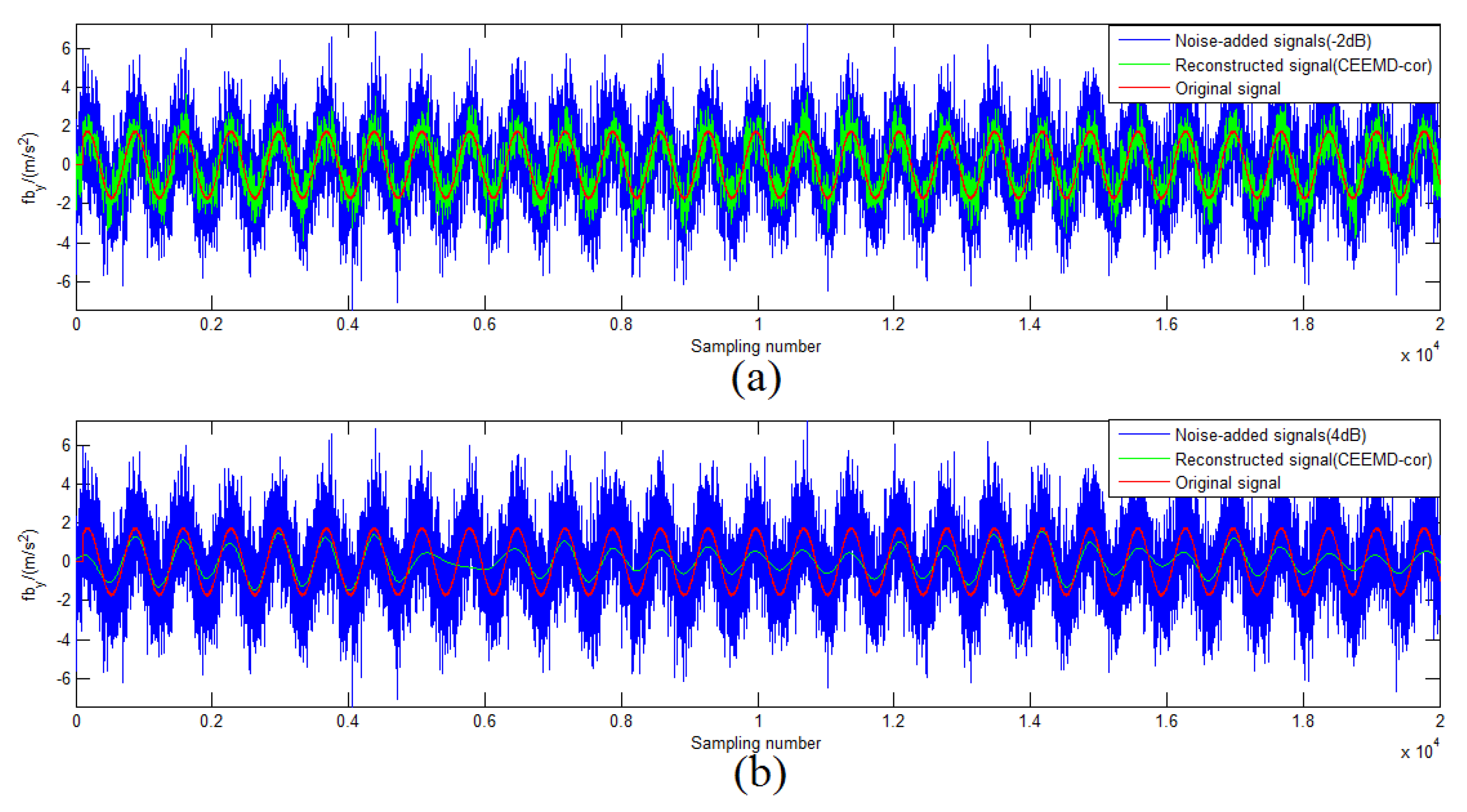
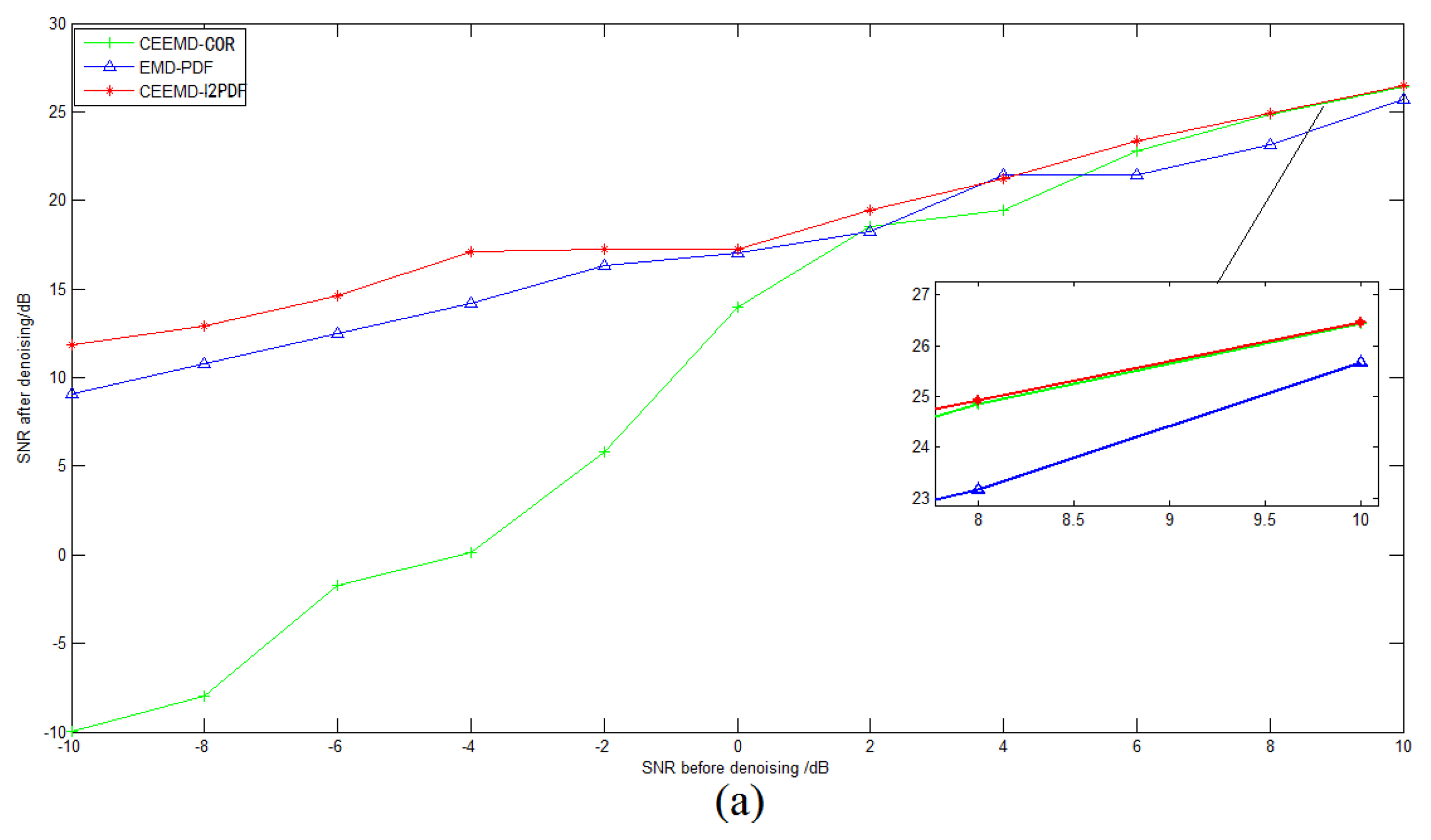
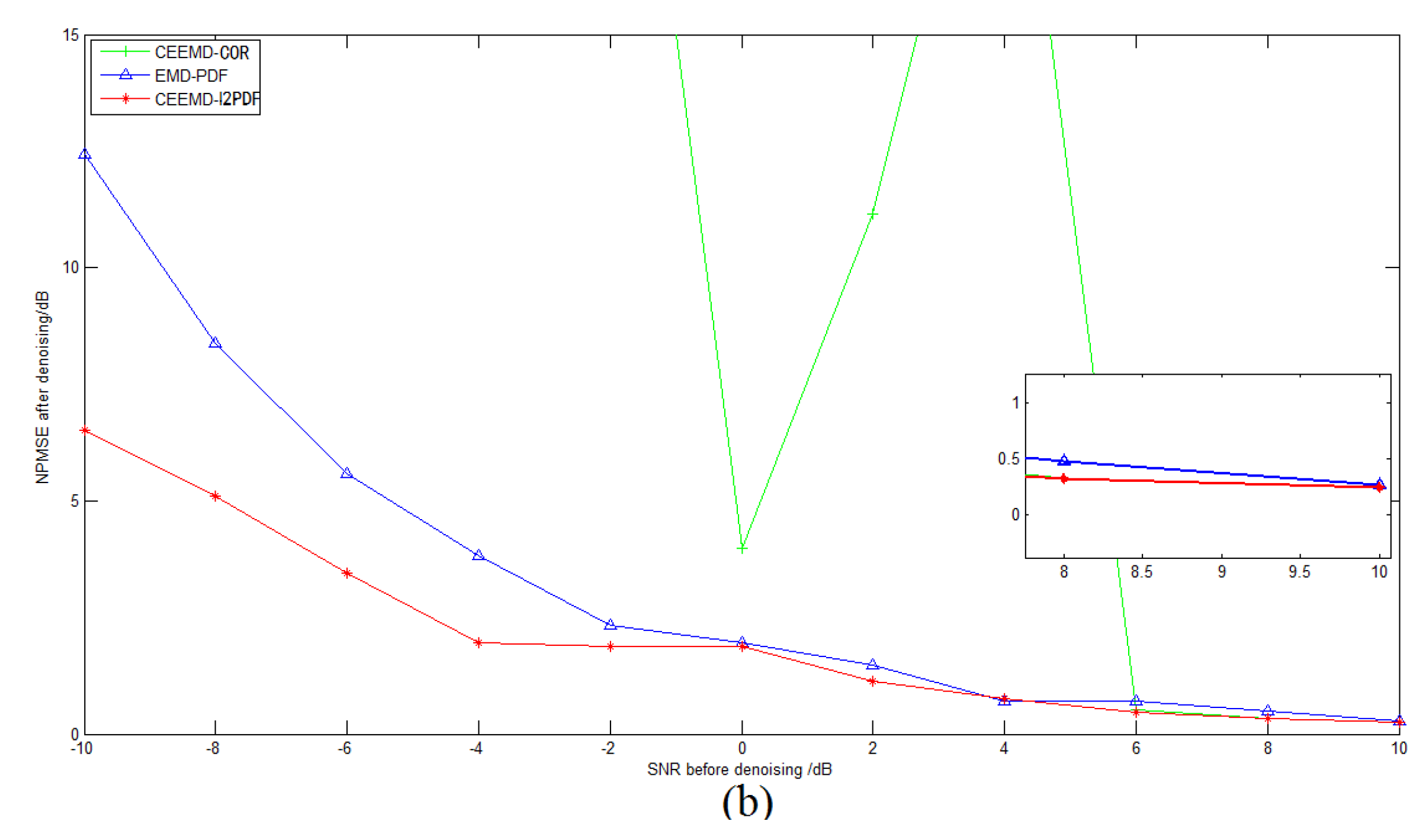
4. Simulation and Experiment Results
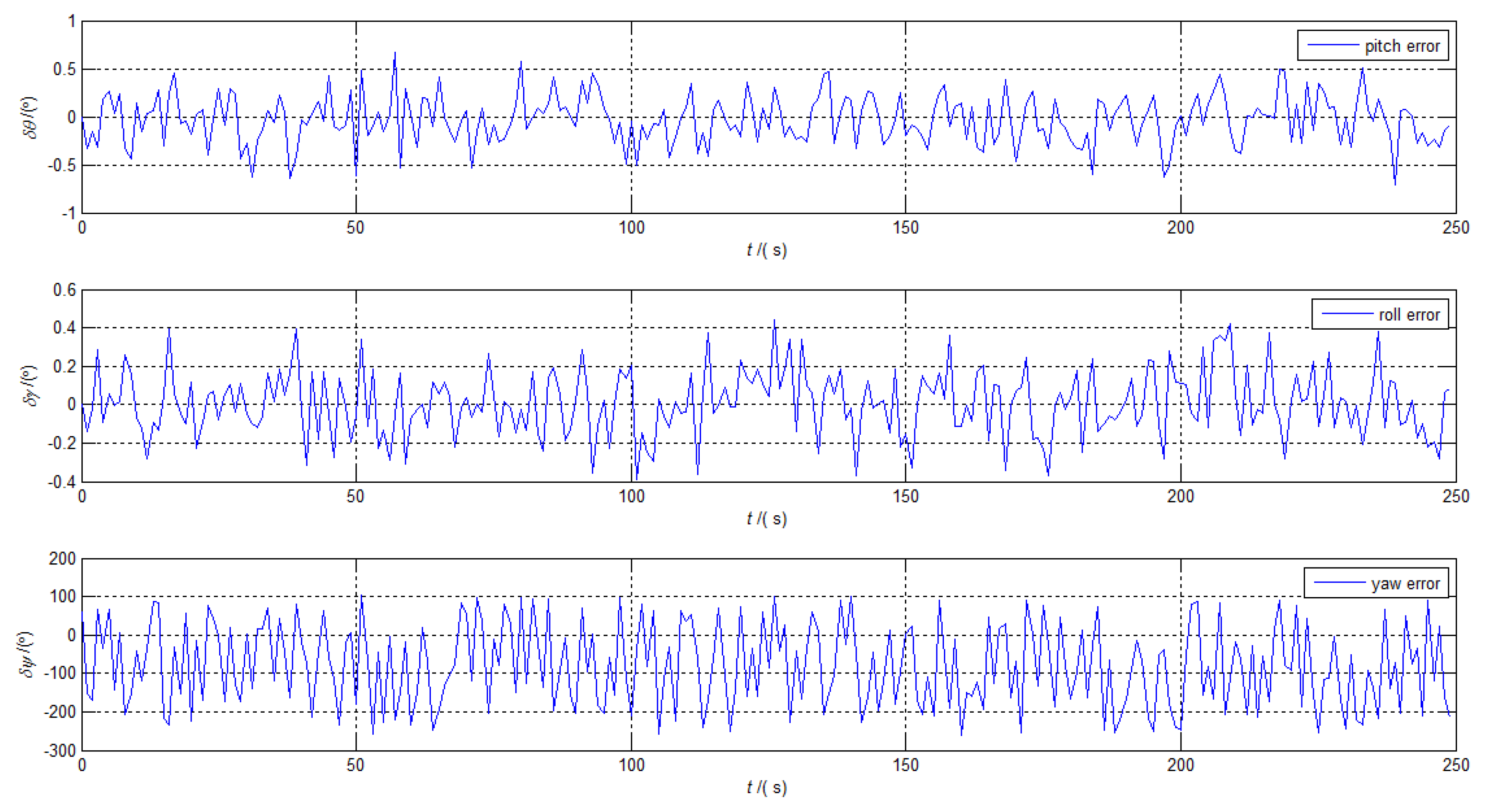
4.1. Simulation Results
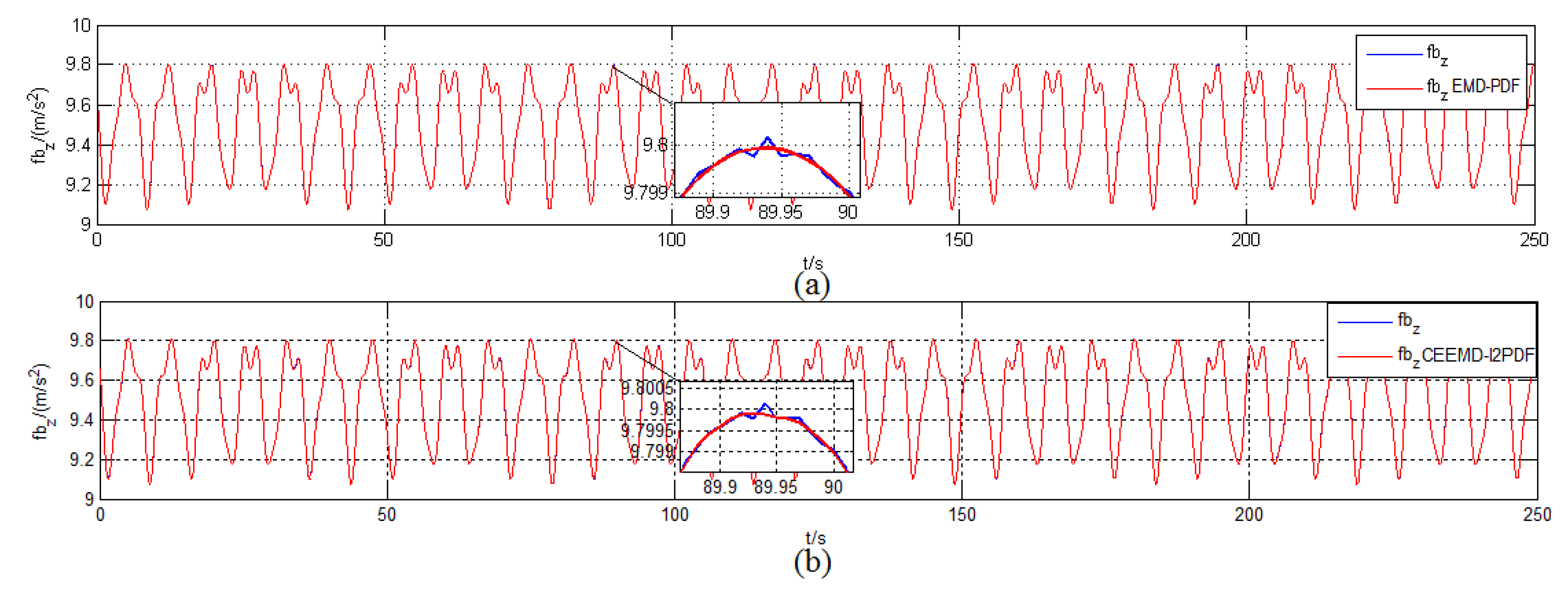
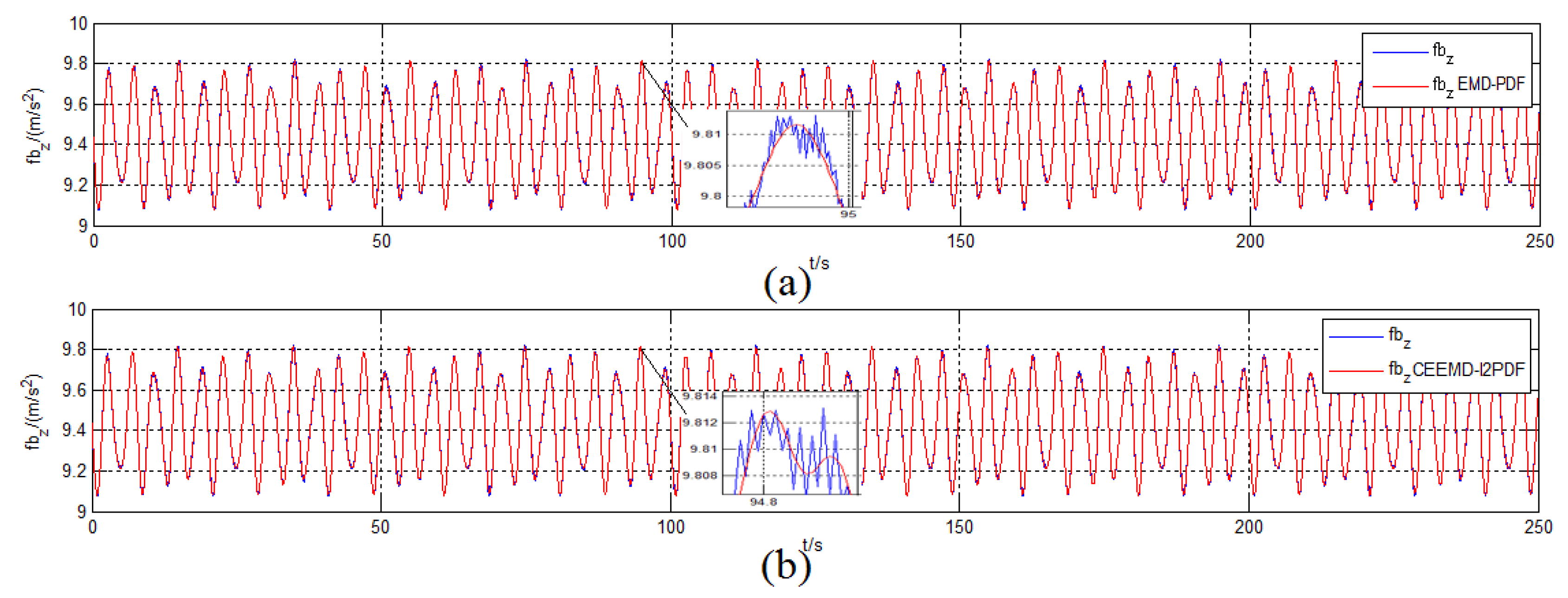
4.2. Turntable Test Result
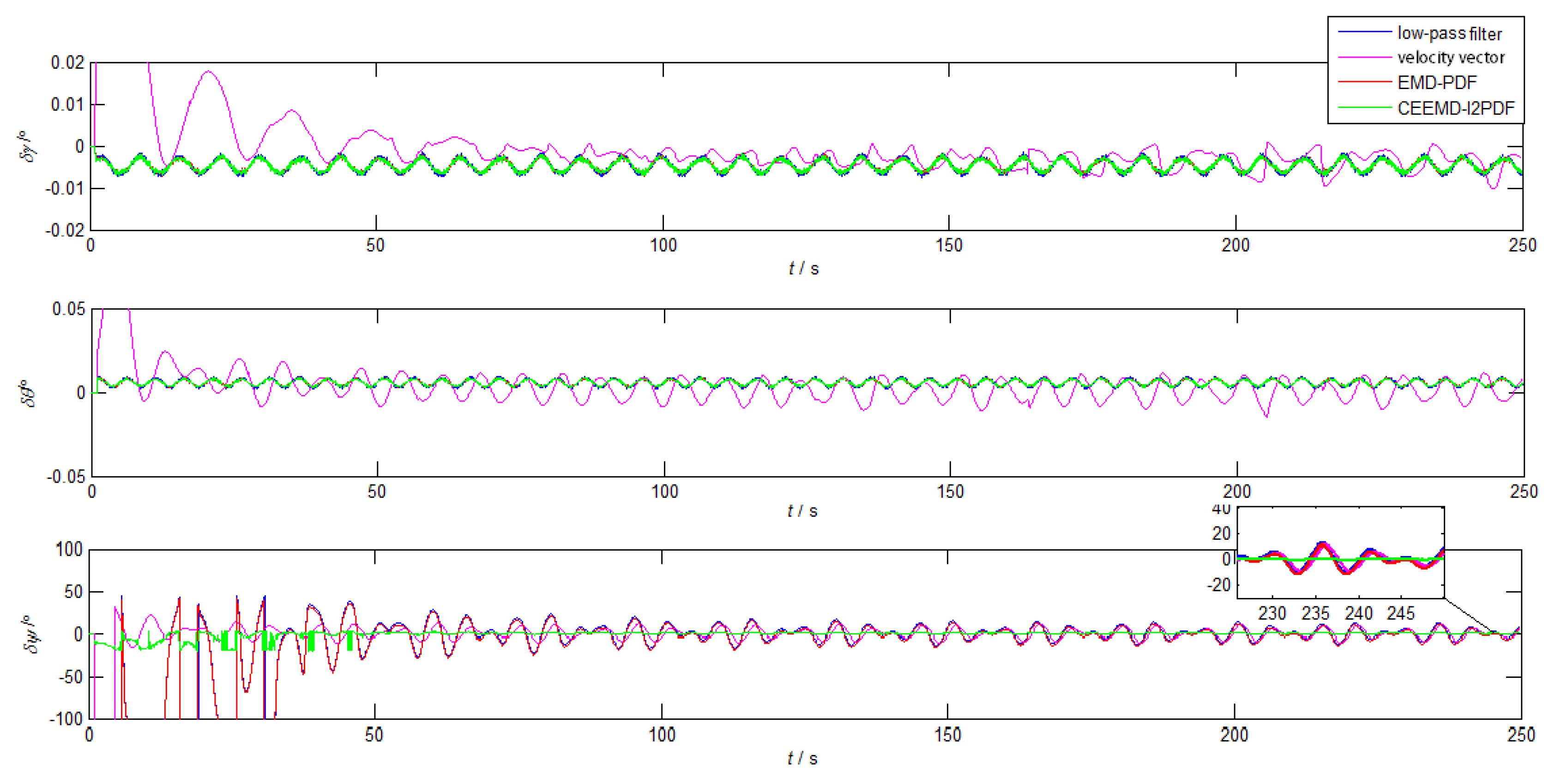
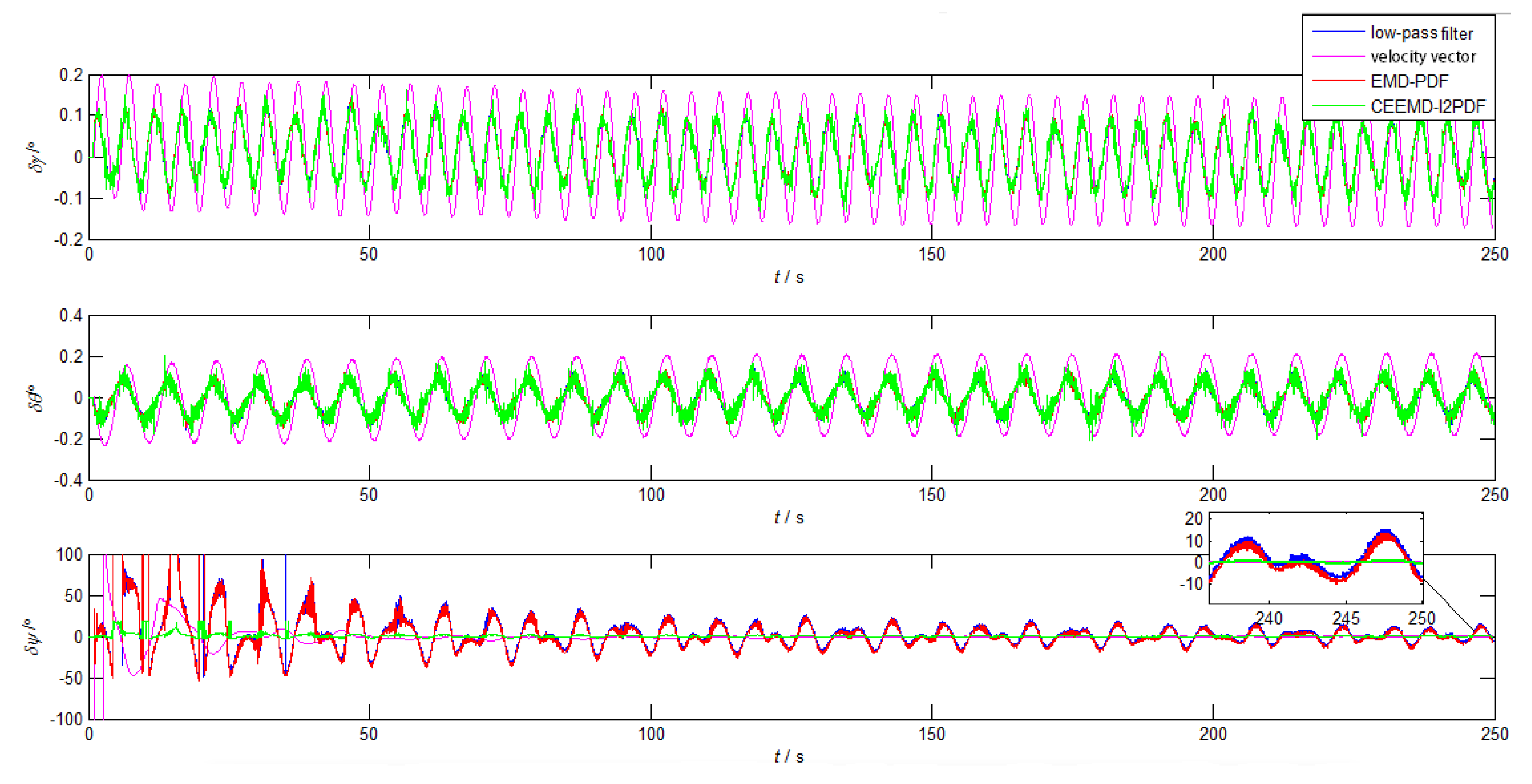
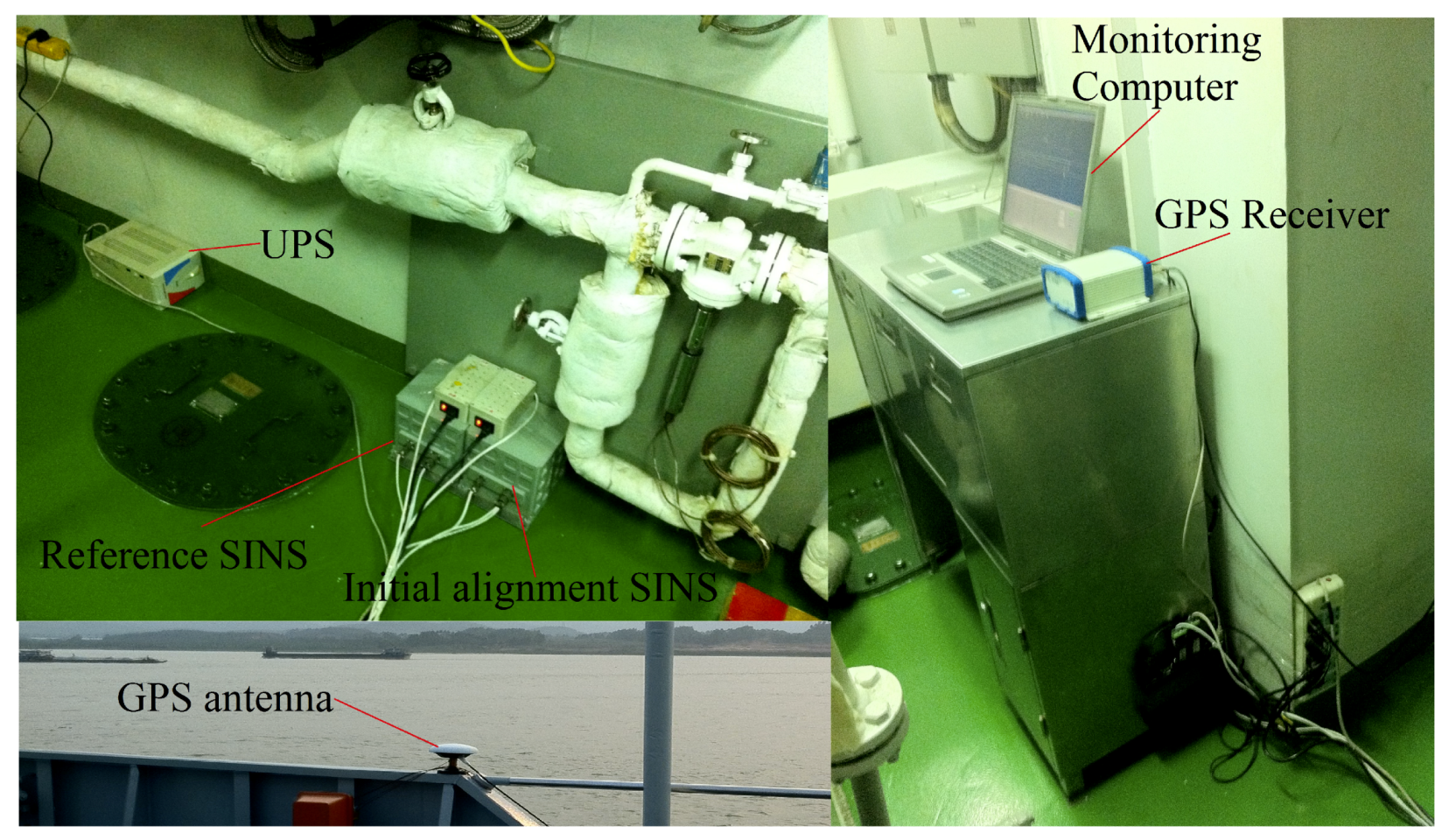
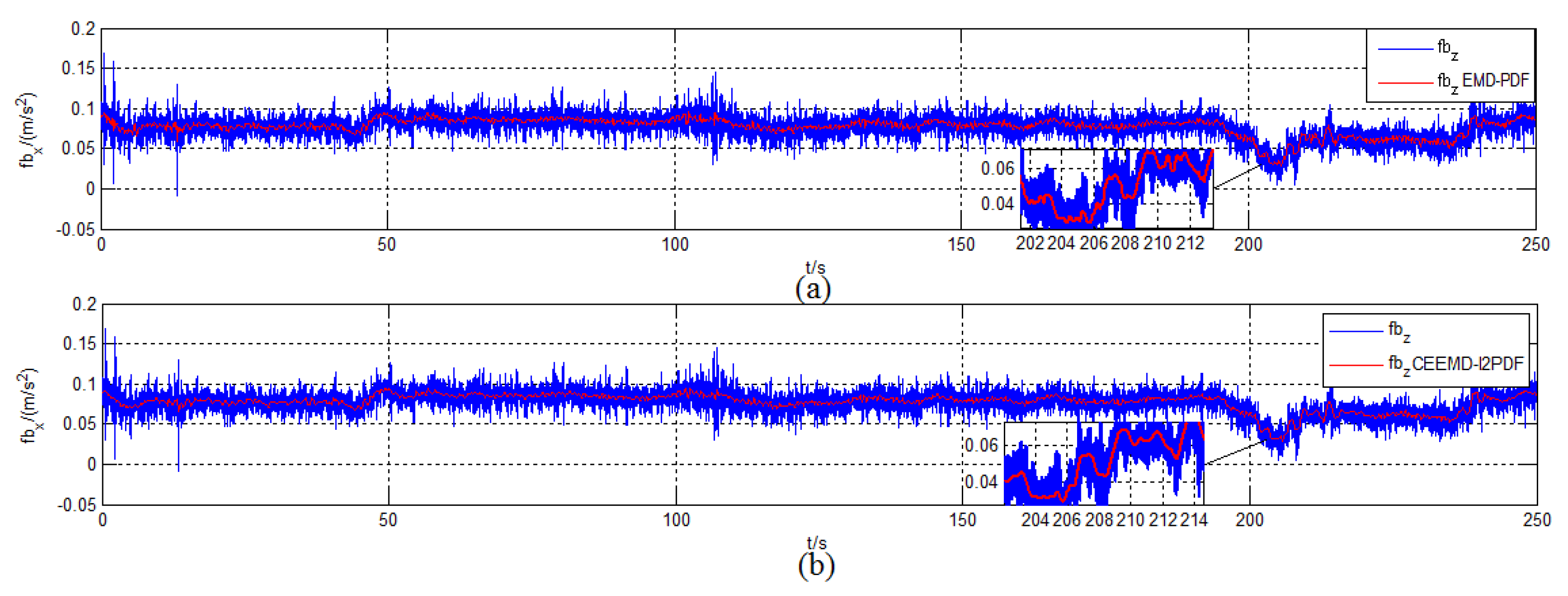
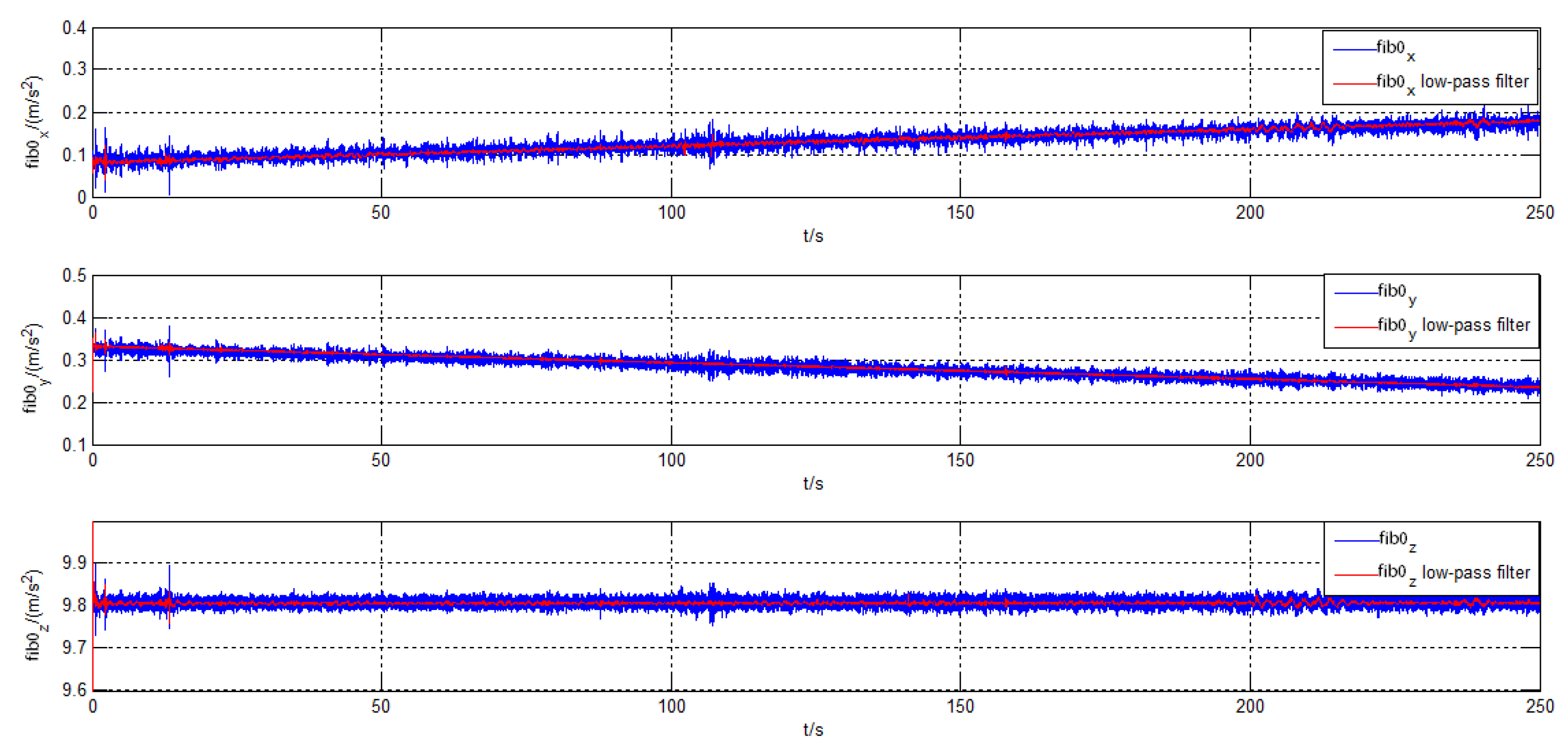
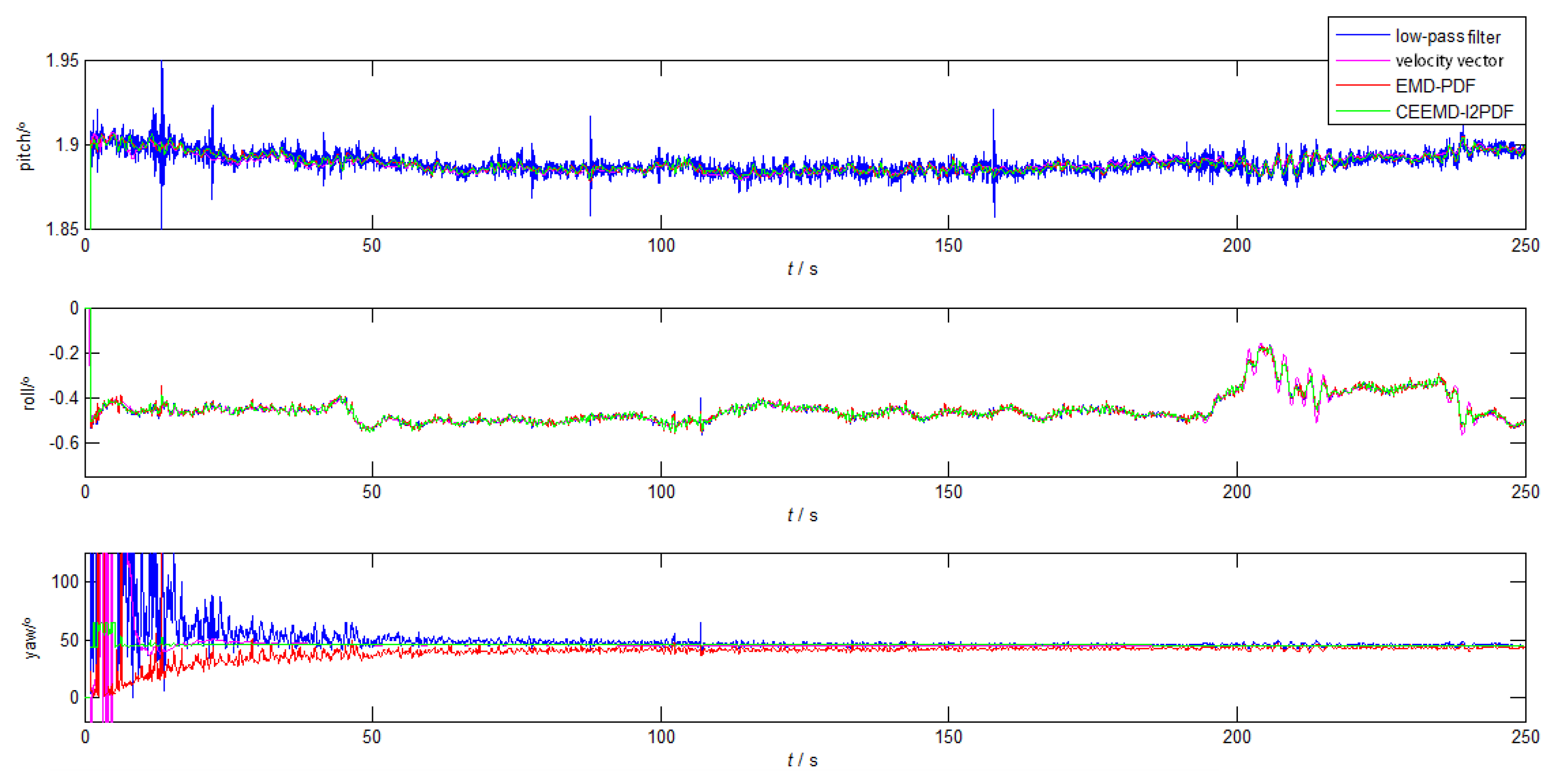
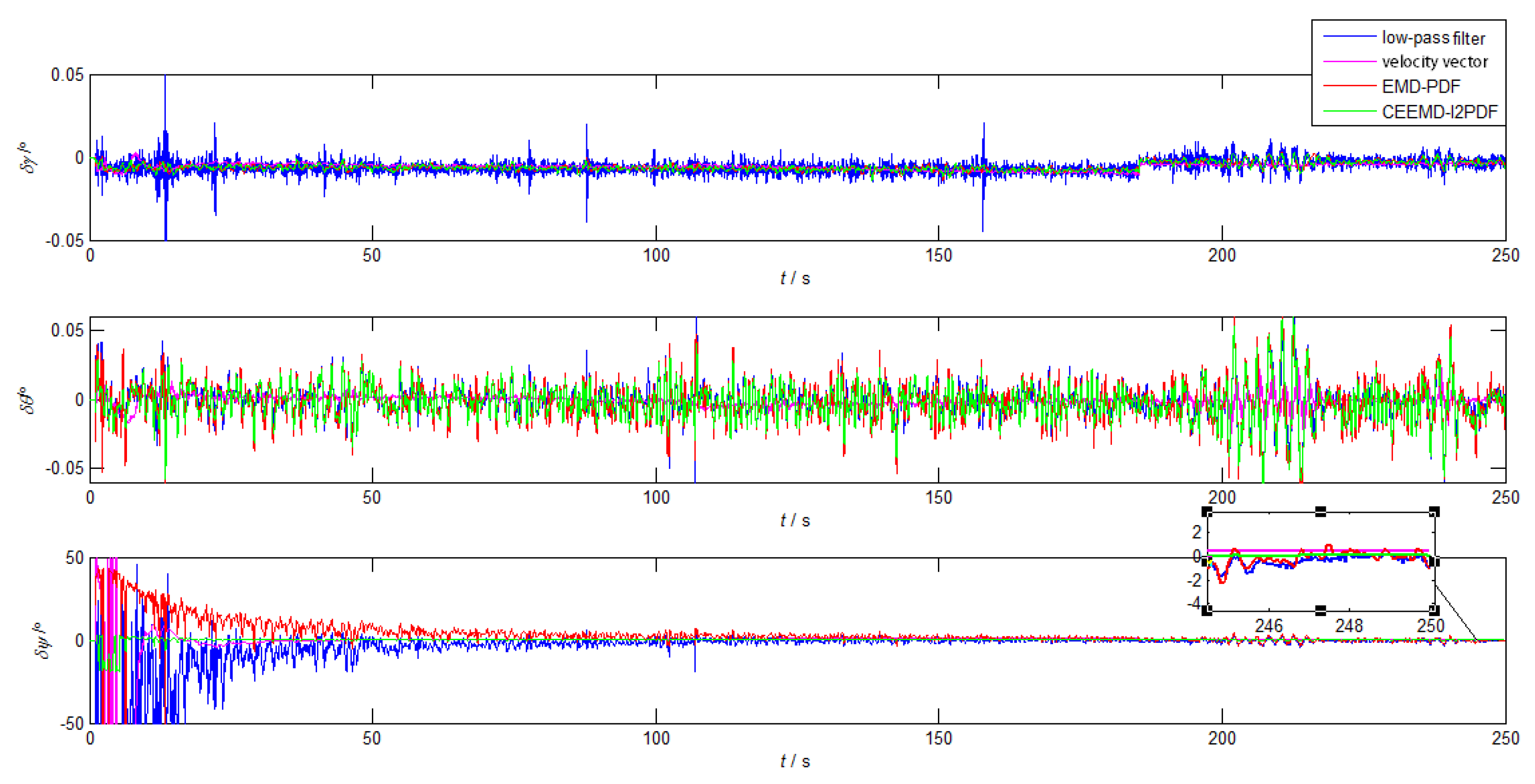
4.3. Ship Mooring Experiment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; IET: London, UK, 2004. [Google Scholar]
- Silson, P.M. Coarse Alignment of a Ship’s Strapdown Inertial Attitude Reference System Using Velocity Loci. IEEE Trans. Instrum. Meas. 2011, 60, 1930–1941. [Google Scholar] [CrossRef]
- Chang, L.; Li, J.; Chen, S. Initial alignment by attitude estimationfor strapdown inertial navigation systems. IEEE Trans. Instrum. Meas. 2015, 64, 784–794. [Google Scholar] [CrossRef]
- Li, J.; Gao, W.; Zhang, Y. Gravitational Apparent Motion-Based SINS Self-Alignment Method for Underwater Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 11402–11410. [Google Scholar] [CrossRef]
- Li, N.; Gao, Y.; Wang, Y. A Low-Cost Underground Garage Navigation Switching Algorithm Based on Kalman Filtering. Sensors 2019, 19, 1861. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; He, H.; Qin, F.; Chang, L. A novel autonomous initial alignmentmethod for strapdown inertial navigation system. IEEE Trans. Instrum. Meas. 2017, 66, 2274–2282. [Google Scholar] [CrossRef]
- Liu, X.; Xu, X.; Zhao, Z. An initial alignment method forstrapdown gyrocompass based on gravitational apparent motion ininertial frame. Measurement 2014, 55, 593–604. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, Y.; Liu, X.; Yang, Y.; Song, Q.; Liu, Z. An improvedself-alignment method for strapdown inertial navigation system based ongravitational apparent motion and dual-vector. Rev. Sci. Instrum. 2014, 85, 125108:1–125108:11. [Google Scholar] [CrossRef]
- Xu, X.; Xu, X.; Zhang, T. A Coarse Alignment Method Based on Digital Filters and Reconstructed Observation Vectors. Sensors 2017, 17, 709. [Google Scholar] [CrossRef]
- Liu, X.; Wang, S.; Guo, X. A Method for Gravitational Apparent Acceleration Identification and Accelerometer Bias Estimation. IEEE Access 2019, 7, 38115–38122. [Google Scholar] [CrossRef]
- Sun, F.; Sun, W. Mooring alignment for marine SINS using the digital filter. Measurement 2010, 43, 1489–1494. [Google Scholar] [CrossRef]
- Xu, X.; Xu, X.; Zhang, T.; Wang, Z. In-Motion Filter-QUEST Alignment for Strapdown Inertial Navigation Systems. IEEE Trans. Instrum. Meas. 2018, 67, 1979–1993. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Yeh, J.; Shieh, J.S.; Huang, N.E. Complementary Ensemble Empirical Mode Decomposition: A Novel Noise Enhanced Data Analysis Method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Li, C.; Li, W.; Li, Q. Friction Signal Denoising Using Complete Ensemble EMD with Adaptive Noise and Mutual Information. Entropy 2015, 17, 5965–5979. [Google Scholar] [CrossRef]
- Ayenu-Prah, A.; Attoh-Okine, N. A criterion for selecting relevant intrinsic mode functions in empirical mode decomposition. Adv. Adapt. Data Anal. 2010, 2, 1–24. [Google Scholar] [CrossRef]
- Duan, Y.; Song, C. Relevant modes selection method based on Spearman correlation coefficient for laser signal denoising using empirical mode decomposition. Opt. Rev. 2016, 23, 936–949. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, C.; Dong, W. EMD filtering of fiber gyro in initial alignment of SINS. Chin. Opt. 2016, 8, 934–940. [Google Scholar]
- Boudraa, A.O.; Cexus, J.C. EMD-Based Signal Filtering. IEEE Trans. Instrum. Meas. 2007, 56, 2196–2202. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.O.; Augier, B. EMD-based filtering using similarity measure between probability density functions of IMFs. IEEE Trans. Instrum. Meas. 2014, 63, 27–34. [Google Scholar] [CrossRef]
- Yang, G.; Liu, Y.; Wang, Y. EMD interval thresholding denoising based on similarity measure to select relevant modes. Signal Process. 2015, 109, 95–109. [Google Scholar] [CrossRef]
- Terrien, J.; Marque, C.; Karlsson, B. Automatic detection of mode mixing in empirical mode decomposition using non-stationarity detection: Application to selecting imfs of interest and denoising. J. Adv. Signal Process. 2011, 2011, 37. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Item | Parameter Values |
|---|---|
| Gyro constant bias (/h) | 0.01 |
| Gyro random bias (white noise) () | 0.001 |
| Accelerometer bias (g) | 100 |
| Accelerometer random bias (white noise) (g) | 10 |
| Parameter | Pitch Error | Roll Error | Yaw Error |
|---|---|---|---|
| Mean | −0.0070 | 0.0035 | −89.6043 |
| STD | 0.2609 | 0.1665 | 137.3078 |
| Methods | Parameter | Pitch Error | Roll Error | Yaw Error |
|---|---|---|---|---|
| low-pass | Mean | −0.0012 | 0.0014 | −0.3580 |
| STD | 0.0021 | 0.0027 | 1.9790 | |
| velocity vector | Mean | −0.0045 | 0.0011 | −0.2450 |
| STD | 0.0029 | 0.0059 | 1.3584 | |
| EMD-PDF | Mean | −0.0012 | 0.0014 | −0.1457 |
| STD | 0.0021 | 0.0026 | 1.8911 | |
| CEEMD- | Mean | −0.0012 | 0.0015 | −0.0277 |
| STD | 0.0021 | 0.0026 | 0.1231 |
| Parameter Item | Initial Alignment Mode | Navigation Mode |
|---|---|---|
| Horizontal attitude | <0.02 (1) | <0.01/h (1) |
| <0.05 (max) | ||
| Yaw | <0.06 (1) | <0.01/h (1) |
| <0.10 (max) |
| Methods | Parameter | Pitch Error | Roll Error | Yaw Error |
|---|---|---|---|---|
| low-pass | Mean | −0.0003 | −0.0028 | 0.3931 |
| STD | 0.0296 | 0.0327 | 3.0755 | |
| velocity vector | Mean | −0.0136 | −0.0069 | 0.0462 |
| STD | 0.1848 | 0.2165 | 0.0994 | |
| EMD-PDF | Mean | −0.0002 | −0.0028 | 0.0898 |
| STD | 0.0297 | 0.0323 | 3.0110 | |
| CEEMD- | Mean | −0.0004 | −0.0030 | 0.0238 |
| STD | 0.0305 | 0.0332 | 0.1847 |
| Methods | Parameter | Pitch Error | Roll Error | Yaw Error |
|---|---|---|---|---|
| low-pass | Mean | −0.0008 | 0.0004 | −0.0878 |
| STD | 0.0019 | 0.0061 | 0.3396 | |
| velocity vector | Mean | −0.0039 | 0.0046 | −0.4737 |
| STD | 0.0004 | 0.0024 | 0.0253 | |
| EMD-PDF | Mean | −0.0007 | 0.0009 | −0.0242 |
| STD | 0.0015 | 0.0076 | 0.3665 | |
| CEEMD- | Mean | −0.0007 | 0.0009 | −0.0142 |
| STD | 0.0015 | 0.0142 | 0.0310 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rong, H.; Gao, Y.; Guan, L.; Zhang, Q.; Zhang, F.; Li, N. GAM-Based Mooring Alignment for SINS Based on An Improved CEEMD Denoising Method. Sensors 2019, 19, 3564. https://doi.org/10.3390/s19163564
Rong H, Gao Y, Guan L, Zhang Q, Zhang F, Li N. GAM-Based Mooring Alignment for SINS Based on An Improved CEEMD Denoising Method. Sensors. 2019; 19(16):3564. https://doi.org/10.3390/s19163564
Chicago/Turabian StyleRong, Hanxiao, Yanbin Gao, Lianwu Guan, Qing Zhang, Fan Zhang, and Ningbo Li. 2019. "GAM-Based Mooring Alignment for SINS Based on An Improved CEEMD Denoising Method" Sensors 19, no. 16: 3564. https://doi.org/10.3390/s19163564
APA StyleRong, H., Gao, Y., Guan, L., Zhang, Q., Zhang, F., & Li, N. (2019). GAM-Based Mooring Alignment for SINS Based on An Improved CEEMD Denoising Method. Sensors, 19(16), 3564. https://doi.org/10.3390/s19163564