A High-Precision CMOS Temperature Sensor with Thermistor Linear Calibration in the (−5 °C, 120 °C) Temperature Range



Abstract
:1. Introduction
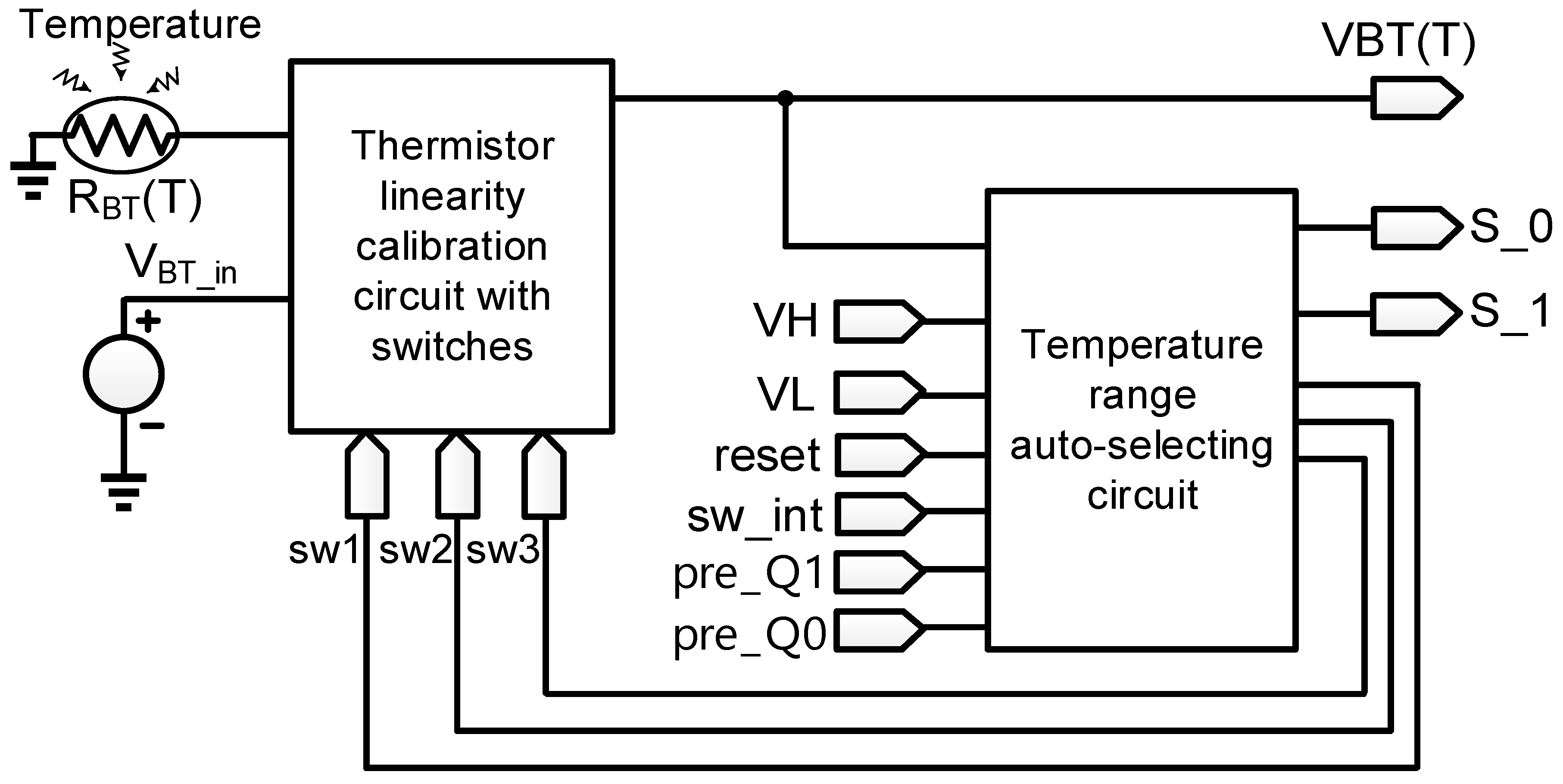
2. Architecture of Proposed Temperature Sensor
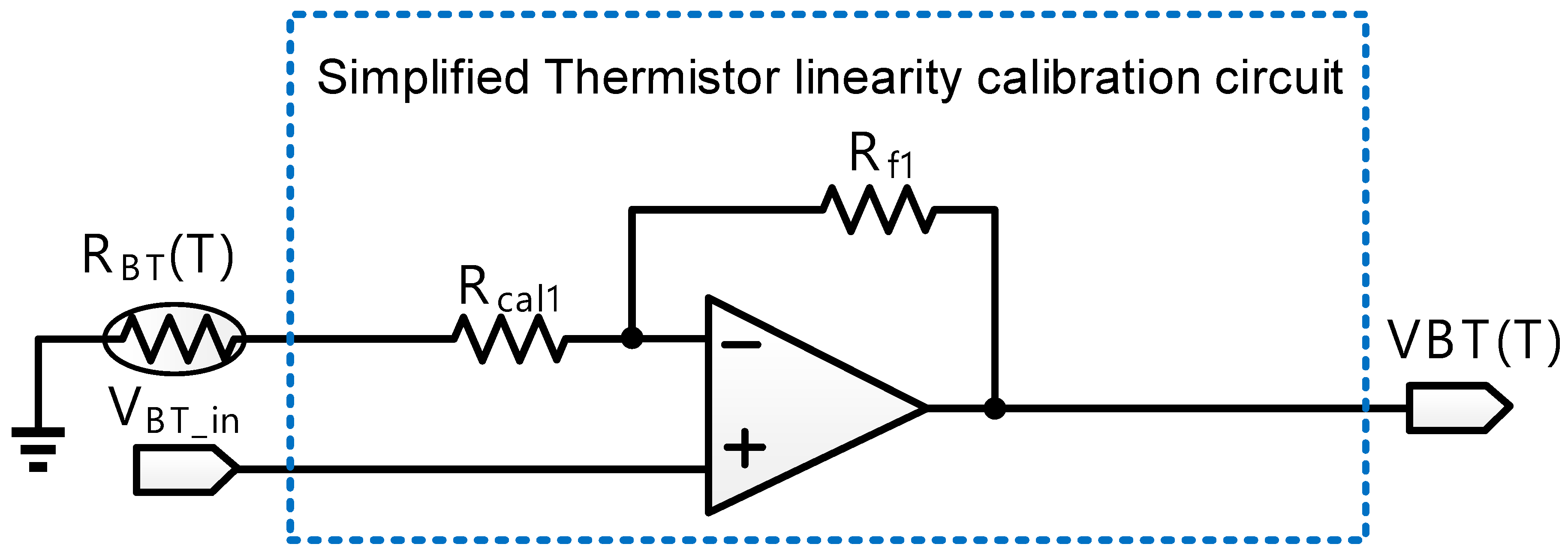
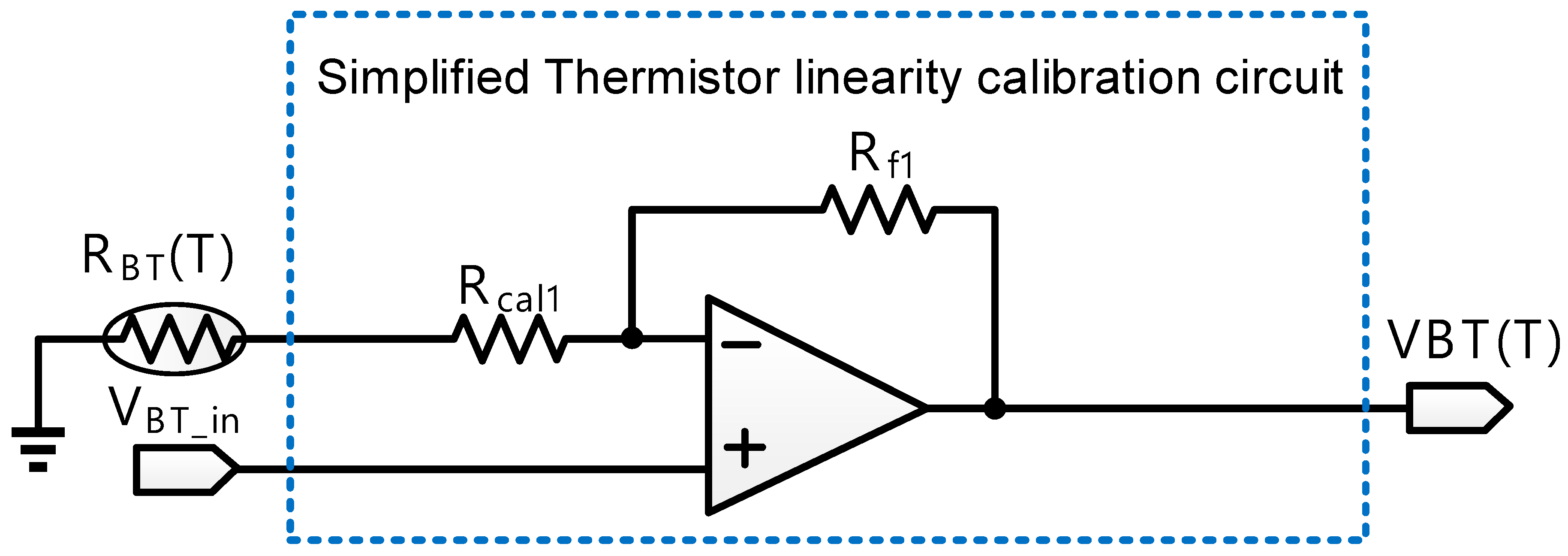
2.1. Thermistor Linearity Calibration Circuit with Switches
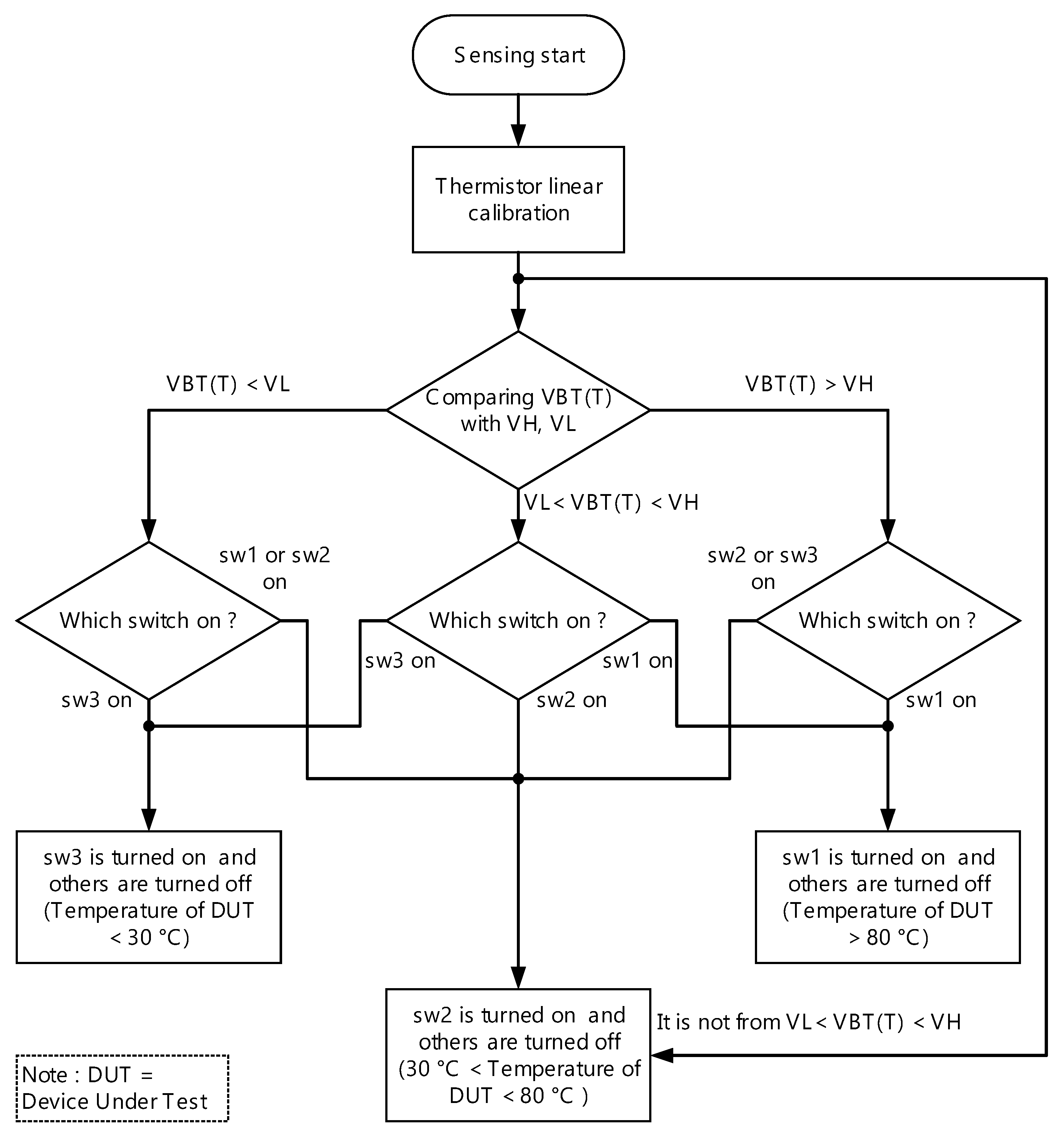
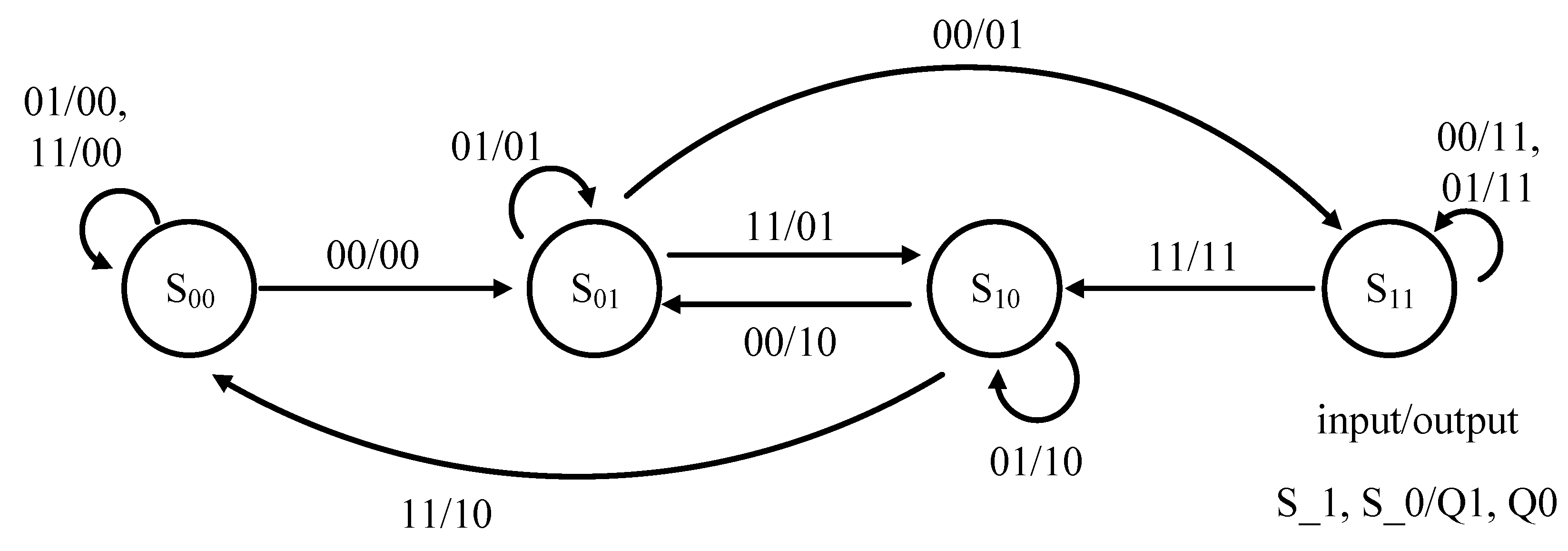
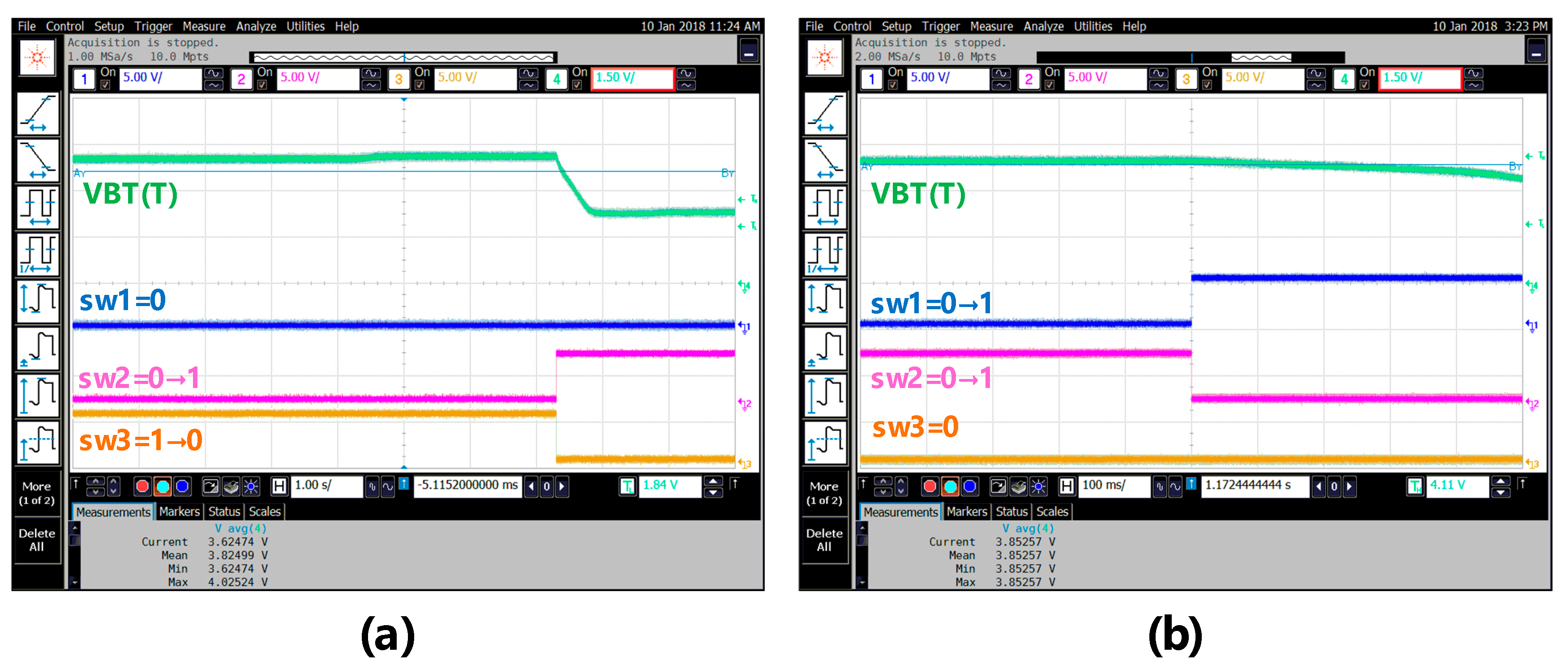
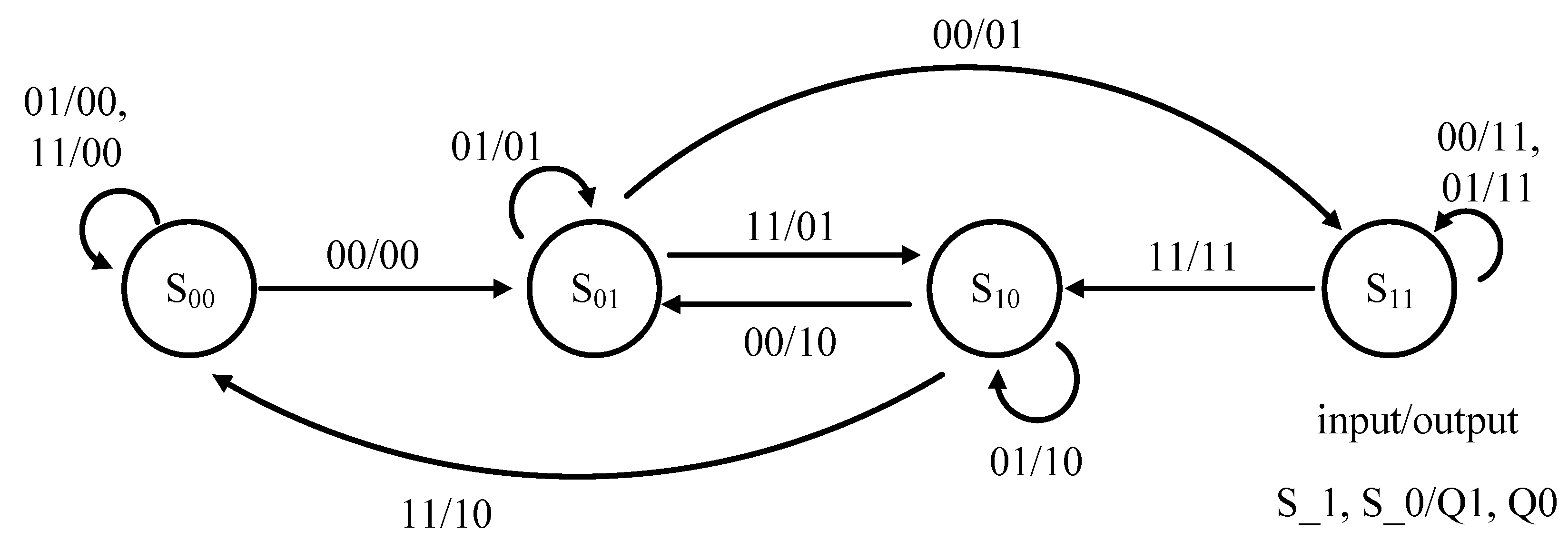
2.2. Temperature Range Auto-Selecting Circuit (TRASC)
- ◾
- > VH: When is higher than VH, the sensing temperature region will change from VBT3 to VBT2 or VBT2 to VBT1 until VL < < VH. Notably, when is in the VBT1, the sensing temperature region stays the same.
- ◾
- VL < < VH: When is between VH and VL, the state is kept in same temperature range.
- ◾
- < VL: When is lower than VL, the sensing temperature region will change from VBT1 to VBT2 or VBT2 to VBT3 until VL < < VH. Notably, when is in the VBT3, the sensing temperature region stays the same.
- ◾
- S00 mode: sw1 is turned on and others are turned off. is in VBT1.
- ◾
- S01 and S10 mode: sw2 is turned on and others are turned off. is in VBT2.
- ◾
- S11 mode: The sw3 is turned on and others are turned off. is in VBT3.
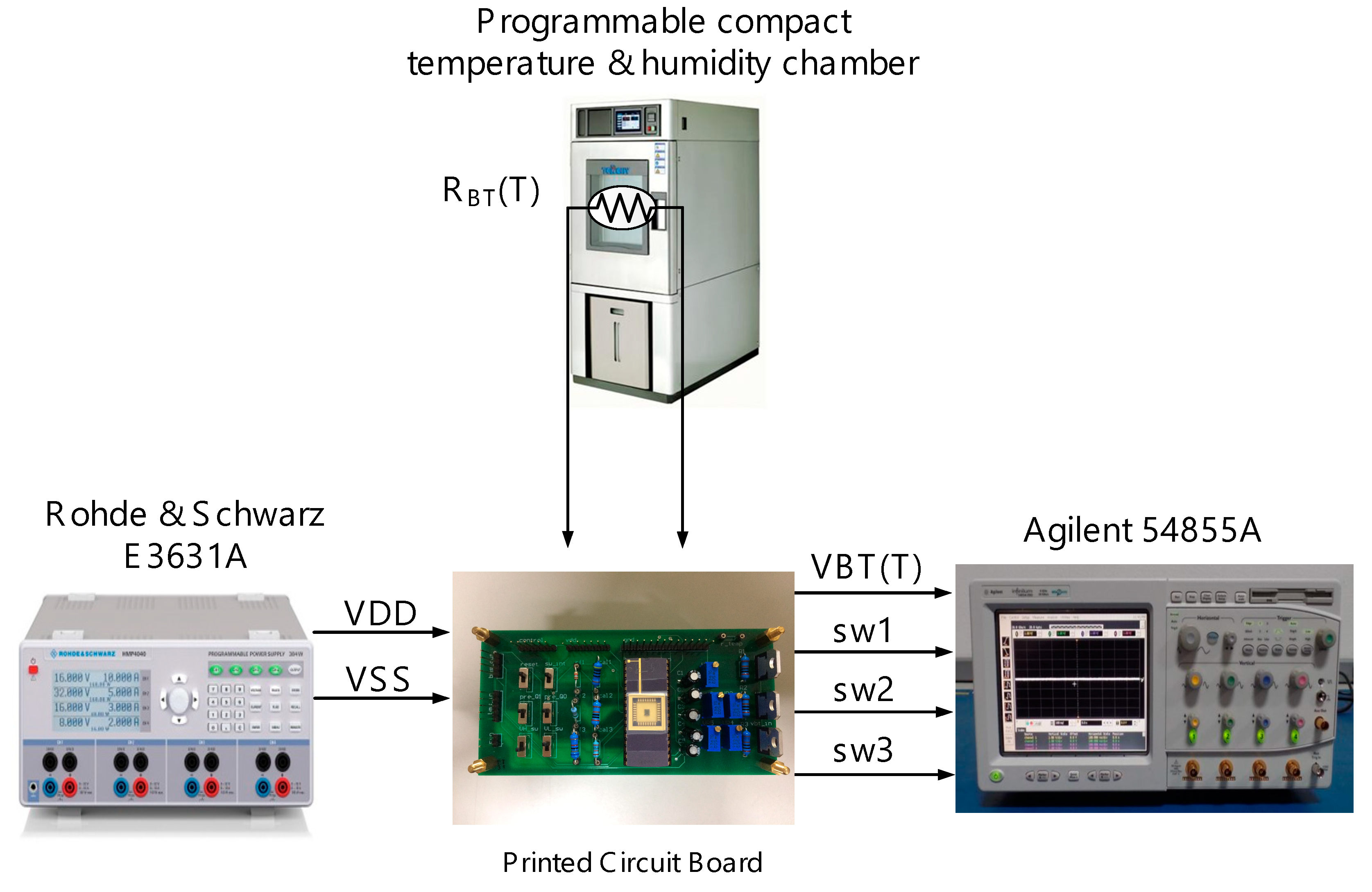
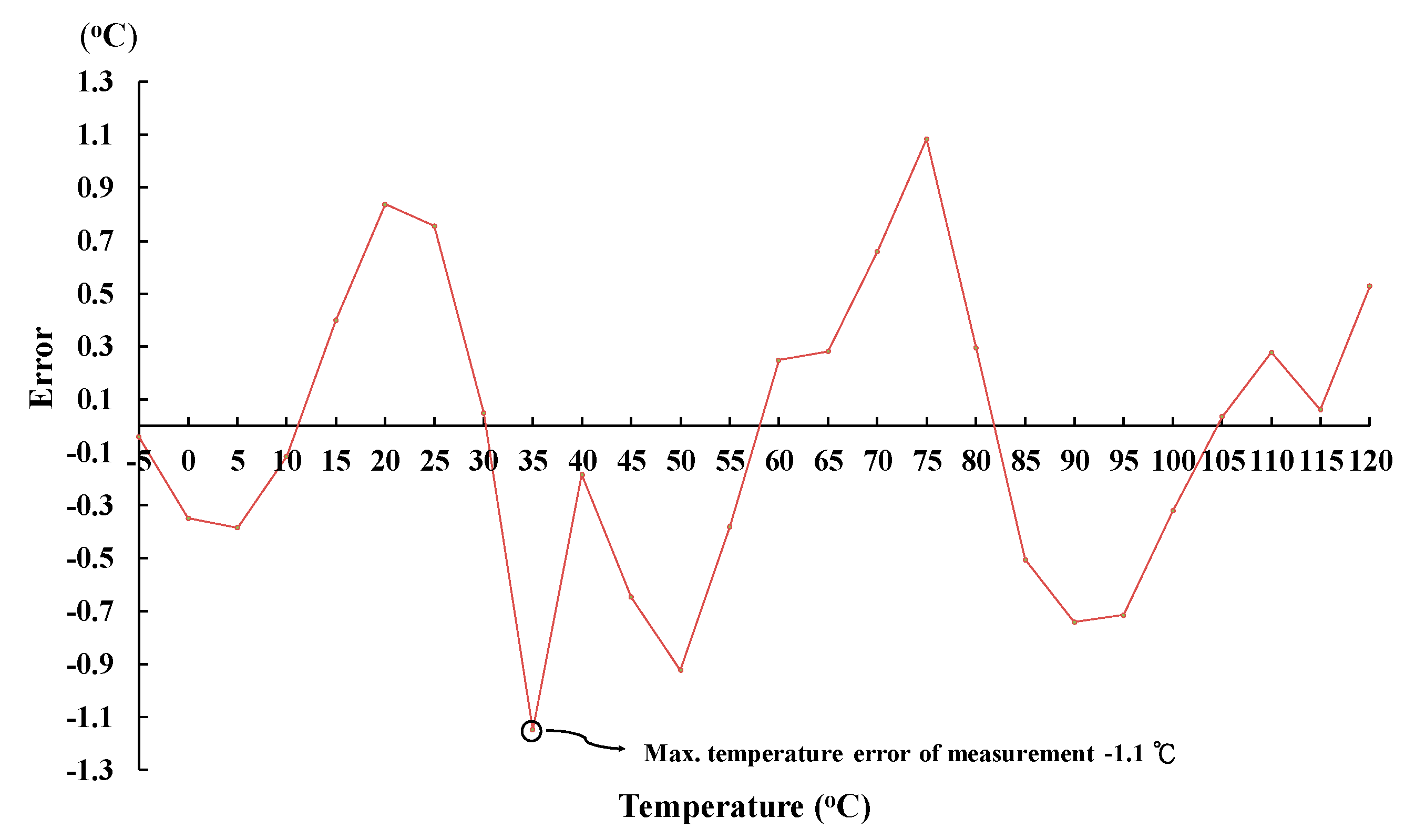
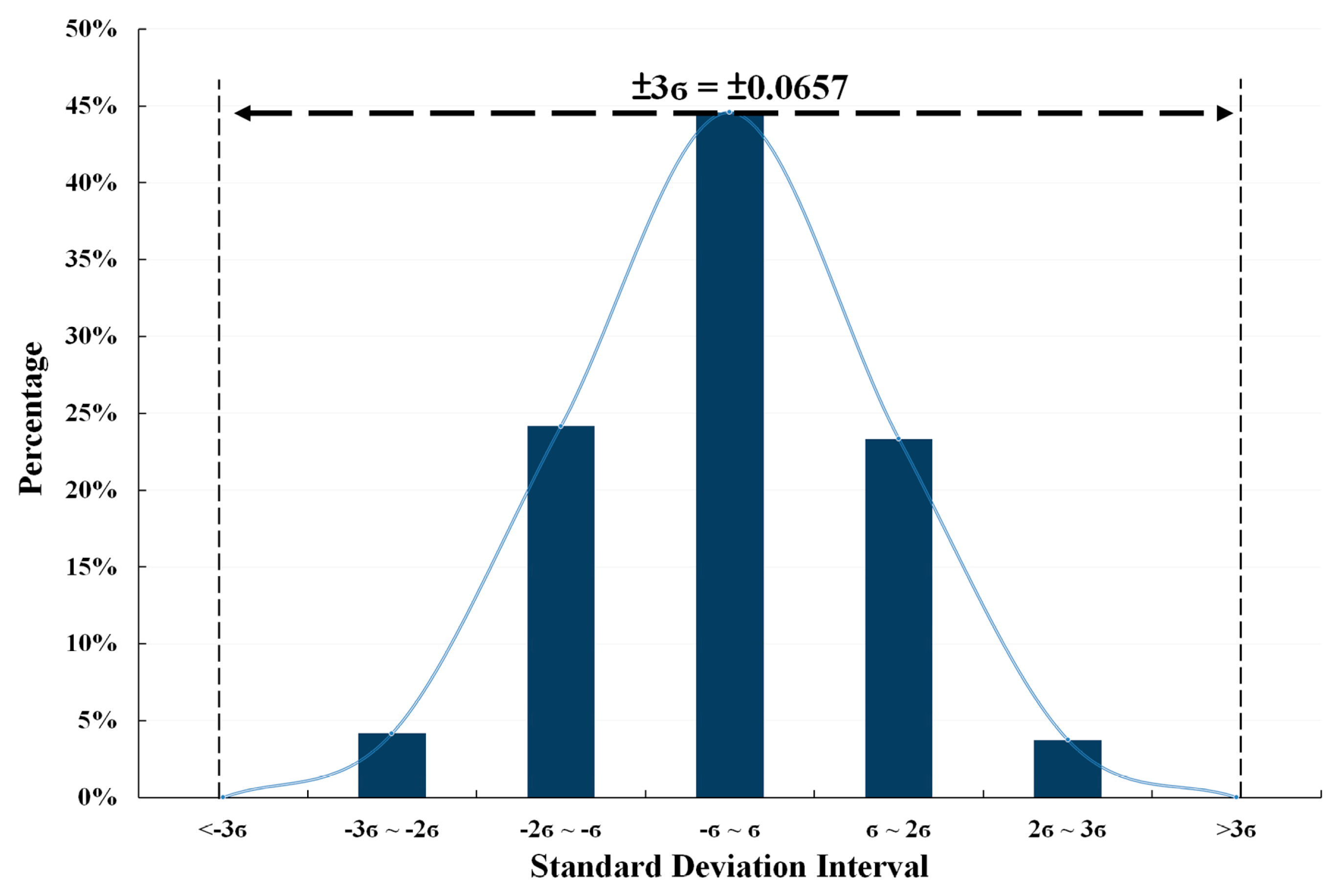
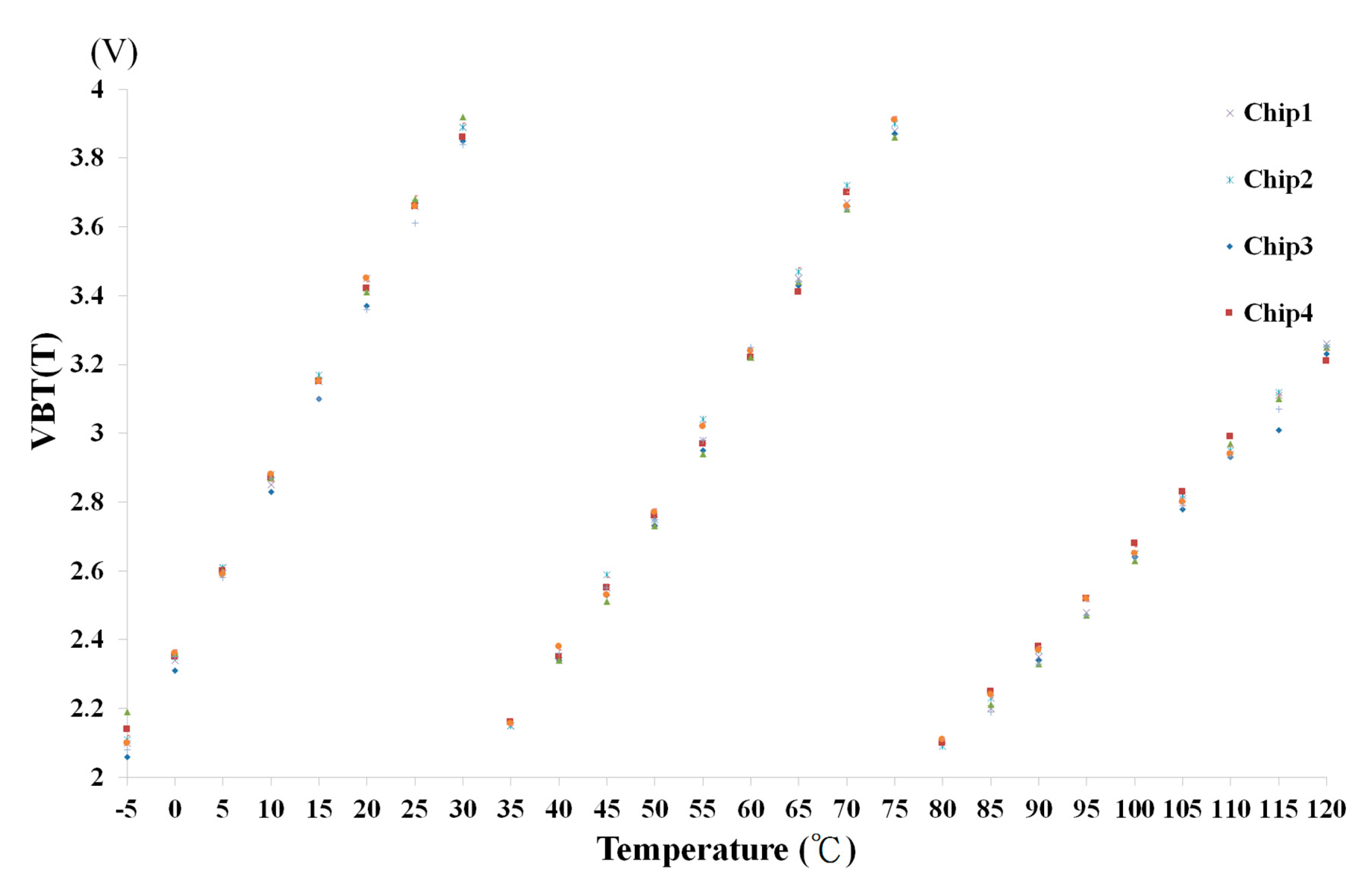
3. Implementation and Measurement
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; Yao, Z.; Yang, Y.; Zhang, L.; Pan, X. A verification method of thermo-infrared remote sensing temperature retrieval algorithm with a CFD model. Am. J. Geogr. Res. Rev. 2018, 1, 1–10. [Google Scholar] [CrossRef]
- Wang, F.; Qin, Z.; Song, C.; Tu, L.; Karnieli, A.; Zhao, S. An improved mono-window algorithm for land surface temperature retrieval from Landsat 8 thermal infrared sensor data. Remote Sens. 2015, 7, 4268–4289. [Google Scholar] [CrossRef]
- Mukherjee, A.; Sarkar, D.; Sen, A.; Dey, D.; Munshi, S. An analog signal conditioning circuit for thermocouple temperature sensor employing thermistor for cold junction compensation. In Proceedings of the International Conference on Control, Automation, Robotics and Embedded Systems (CARE), Jabalpur, India, 16–18 December 2013; pp. 1–5. [Google Scholar]
- Liu, X. A Linear Thermocouple Temperature Meter Based on Inverse Reference Function. In Proceedings of the International Conference on Intelligent Computation Technology and Automation (ICTA), Changsha, China, 11–12 May 2010; pp. 138–143. [Google Scholar]
- Fetisov, E.A.; Fedirko, V.A.; Timofeev, A.E. Study of thermal IR sensor on the base of vacuum micro/nanoelectromechanical system with non-stationary thermocouple’s seebeck effect. In Proceedings of the International Conference on Actual Problems of Electron Devices Engineering (APEDE), Saratov, Russia, 22–23 September 2016; pp. 1–6. [Google Scholar]
- Jamieson, J. A platinum resistance thermometer. Electr. Educ. 1991, 1991, 7–9. [Google Scholar] [CrossRef]
- Arenas, O.; Alam, É.A.; Thevenot, A.; Cordier, Y.; Jaouad, A.; Aimez, V.; Maher, H.; Arès, R.; Boone, F. Integration of micro resistance thermometer detectors in AlGaN/GaN devices. IEEE J. Electron Devices Soc. 2014, 2, 145–148. [Google Scholar] [CrossRef]
- Bosson, G.; Guttman, F.; Simmons, L.M. Relationship between temperature and resistance of a thermistor. J. Appl. Phys. 1950, 21, 1267–1268. [Google Scholar] [CrossRef]
- Khan, A.A.; Al-Turaigi, M.A.; Alamoud, A.R.M. A novel wide range linearization approach for thermistor thermometer. IEEE Trans. Instrum. Meas. 1987, 36, 763–769. [Google Scholar] [CrossRef]
- Sarkar, A.R.; Dey, D.; Munshi, S. Linearization of NTC thermistor characteristic using op-amp based inverting amplifier. IEEE Sens. J. 2013, 13, 4621–4626. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Das, A.; Mukherjee, A.; Dey, D.; Bhattacharyya, B.; Munshi, S. A linearization scheme for thermistor-based sensing in biomedical studies. IEEE Sens. J. 2016, 16, 603–609. [Google Scholar] [CrossRef]
- Kumar, V.N.; Narayana, K.V.L.; Bhujangarao, A.; Sankar, S. Development of an ann-based linearization technique for the VCO thermistor circuit. IEEE Sens. J. 2015, 15, 886–894. [Google Scholar] [CrossRef]
- Terchy Environmental Technology Ltd. Terchy Datasheet MHK-120, Nantou City, Taiwan. Available online: http://www.terchy.com.tw/en/ (accessed on 1 July 2018).
- Nenova, Z.P.; Nenov, T.G. Linearization circuit of the thermistor connection. IEEE Trans. Instrum. Meas. 2009, 58, 441–449. [Google Scholar] [CrossRef]
- Concepcion, R.S.; Cruz, F.R.G.; Uy, F.A.A.; Baltazar, J.M.E.; Carpio, J.N.; Tolentino, K.G. Triaxial MEMS digital accelerometer and temperature sensor calibration techniques for structural health monitoring of reinforced concrete bridge laboratory test platform. In Proceedings of the IEEE International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Manila, Philippines, 1–3 December 2017; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infrared | Thermocouple | Resistance Thermometer | Thermistor | |
|---|---|---|---|---|
| Sensing temperature range (°C) | −50~400 | −200~1200 | −200~500 | −90~150 |
| Volume | ≈200 × 50 × 50 mm | ≈Ø20 × 2000 mm | ≈Ø10 × 2000 mm | ≈Ø0.5 × 1 mm |
| Reaction | Fast | Fast | Slow | Fast |
| Disadvantage | Limited measurement method | Need a reference temperature | Expensive | Nonlinear |
| [14] | [10] | [11] | [15] | This Work | |
|---|---|---|---|---|---|
| Year | 2009 TIM | 2013 SJ | 2016 SJ | 2017 HNICEM | 2018 |
| Implementation | PCB | PCB | PCB | PCB | T50UHV CMOS |
| Power (mW) | N/A | N/A | N/A | N/A | 12 |
| Output of Voltage (V) | N/A | 2~4.5 | N/A | N/A | 1.9~4.1 |
| Max. Linearity Error (%) | 1.7 | 3 | 1.3 | 9.05 | 1.4 |
| Sensing temperature range (°C) | 0~120 | 30~120 | 30~110 | −10~100 | −5~120 |
| Sensitivity (mV/°C) | N/A | 27 | N/A | N/A | 17.6 |
| Temperature Error (°C) | 2 | 2.7 | 1.1 | 2 | 1.1 |
| Reliability | N/A | N/A | N/A | N/A | 3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.-C.; Hou, Z.-Y.; You, J.-C. A High-Precision CMOS Temperature Sensor with Thermistor Linear Calibration in the (−5 °C, 120 °C) Temperature Range. Sensors 2018, 18, 2165. https://doi.org/10.3390/s18072165
Wang C-C, Hou Z-Y, You J-C. A High-Precision CMOS Temperature Sensor with Thermistor Linear Calibration in the (−5 °C, 120 °C) Temperature Range. Sensors. 2018; 18(7):2165. https://doi.org/10.3390/s18072165
Chicago/Turabian StyleWang, Chua-Chin, Zong-You Hou, and Jhih-Cheng You. 2018. "A High-Precision CMOS Temperature Sensor with Thermistor Linear Calibration in the (−5 °C, 120 °C) Temperature Range" Sensors 18, no. 7: 2165. https://doi.org/10.3390/s18072165
APA StyleWang, C.-C., Hou, Z.-Y., & You, J.-C. (2018). A High-Precision CMOS Temperature Sensor with Thermistor Linear Calibration in the (−5 °C, 120 °C) Temperature Range. Sensors, 18(7), 2165. https://doi.org/10.3390/s18072165