On Maximizing the Throughput of Packet Transmission under Energy Constraints


Abstract
1. Introduction
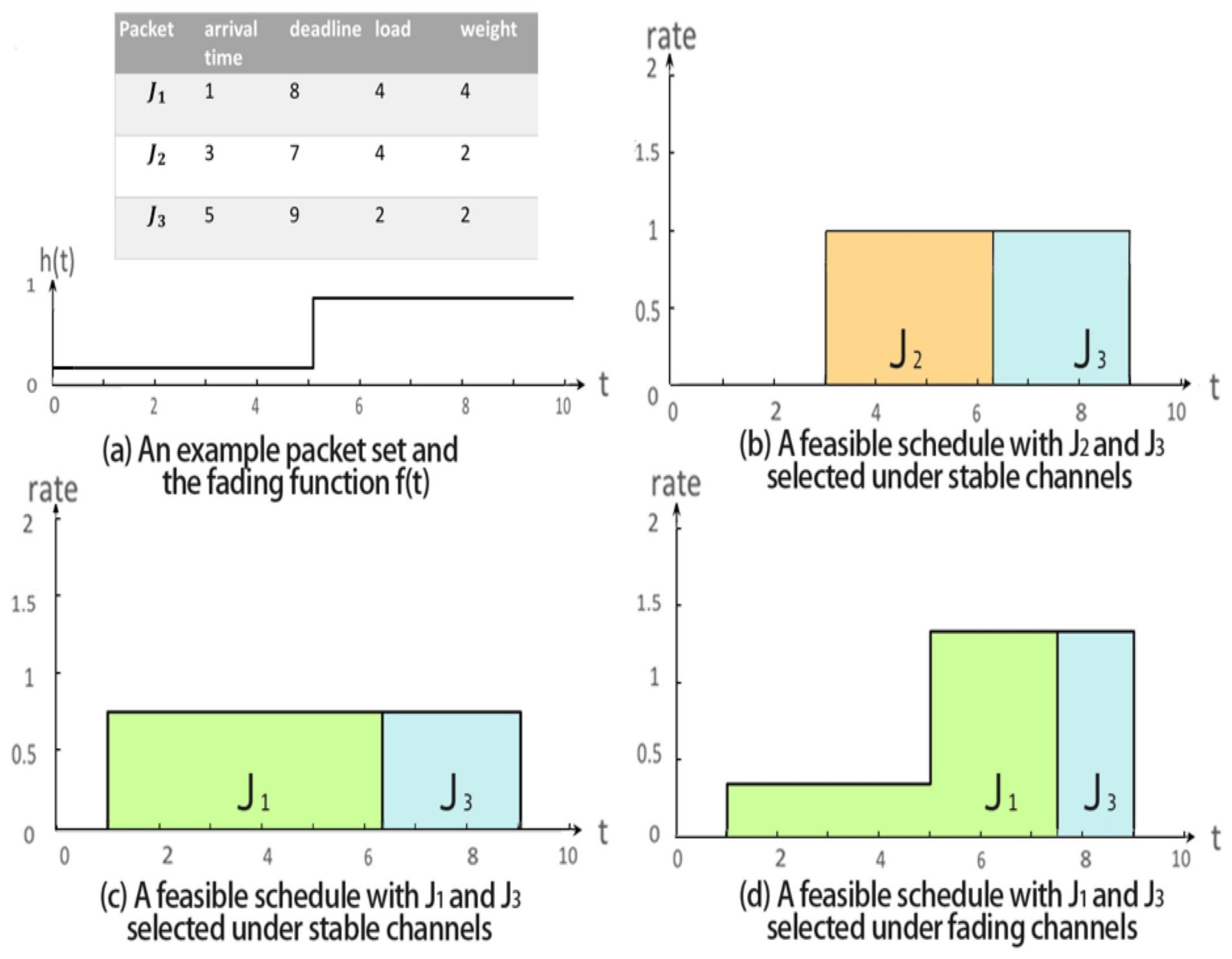
Can we determine properly a set of data packets for delivery and design an energy-efficient rate scheduling policy to maximize the weighted throughput, i.e., the total value of successfully/integrally transmitted packets, without violating the energy constraint?
- Since it is necessary to determine a subset of packets with high total value for delivery, it is easy to show that computing the optimal solution with maximum weighted throughput is NP-hard by reducing from the traditional knapsack problem. The difficulty mainly lies in the integral choices of packets, which differs from throughput maximization problems addressed in all prior works that aims at maximizing the data bits and admits polynomial-time optimal algorithms.
- We need to not only determine properly a subset of packets to be transmitted, but also design the corresponding optimal rate policy at the meantime. These two decisions are correlated because the chosen packets to be transmitted must admit a feasible rate schedule and vice versa.
- The conflict between the energy constraint and the integrity constraint is strengthened by the unstable fading effect of the channels, which asks for a good trade-off between energy consumption and QoS satisfaction.
- We develop an optimal algorithm (called DLDP) with pseudo-polynomial running time to maximize the weighted throughput of packets transmitted in fading channels under energy and integrity constraints. As the problem undertaken is NP-hard, our proposed algorithm computes the best possible solution in pseudo-polynomial time. This is the first work theoretically addressing the max-throughput rate scheduling problem with the integrity constraints of transmitted data packets.
- We also develop an online heuristic algorithm by applying the proposed optimal algorithm DLDP and iteratively computing a local optimal solution. Simulation results validate its efficiency.
2. System Model and Problem Formulation
2.1. System Model
2.2. Problem Formulation
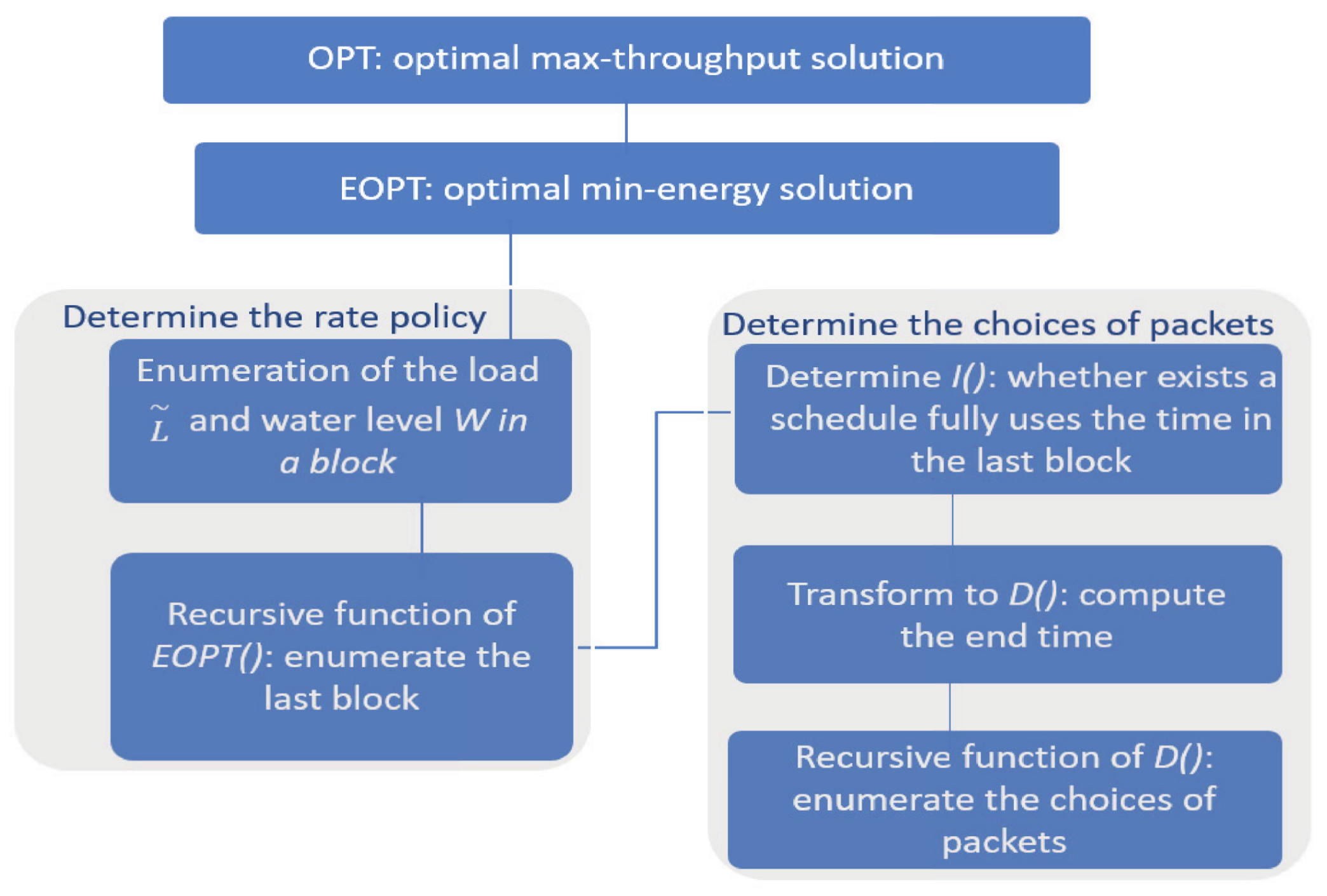
2.3. Overview of Our Solutions
3. Optimal Algorithm for Offline MTEF
3.1. First Layer of DLDP
3.2. Second Layer of DLDP
| Algorithm 1 |
| Input:,,J,V Output:
|
| Algorithm 2 |
| Input:, J,V,W Output:
|
3.3. Merging Together: The Optimal Algorithm
| Algorithm 3 DLDP(Double Layers Dynamical Programming) |
| Input:J, E Output:
|
4. Online Heuristic Algorithm for MTEF
4.1. Online Heuristic Algorithm
| Algorithm 4 HST |
| Input: Output:V
|
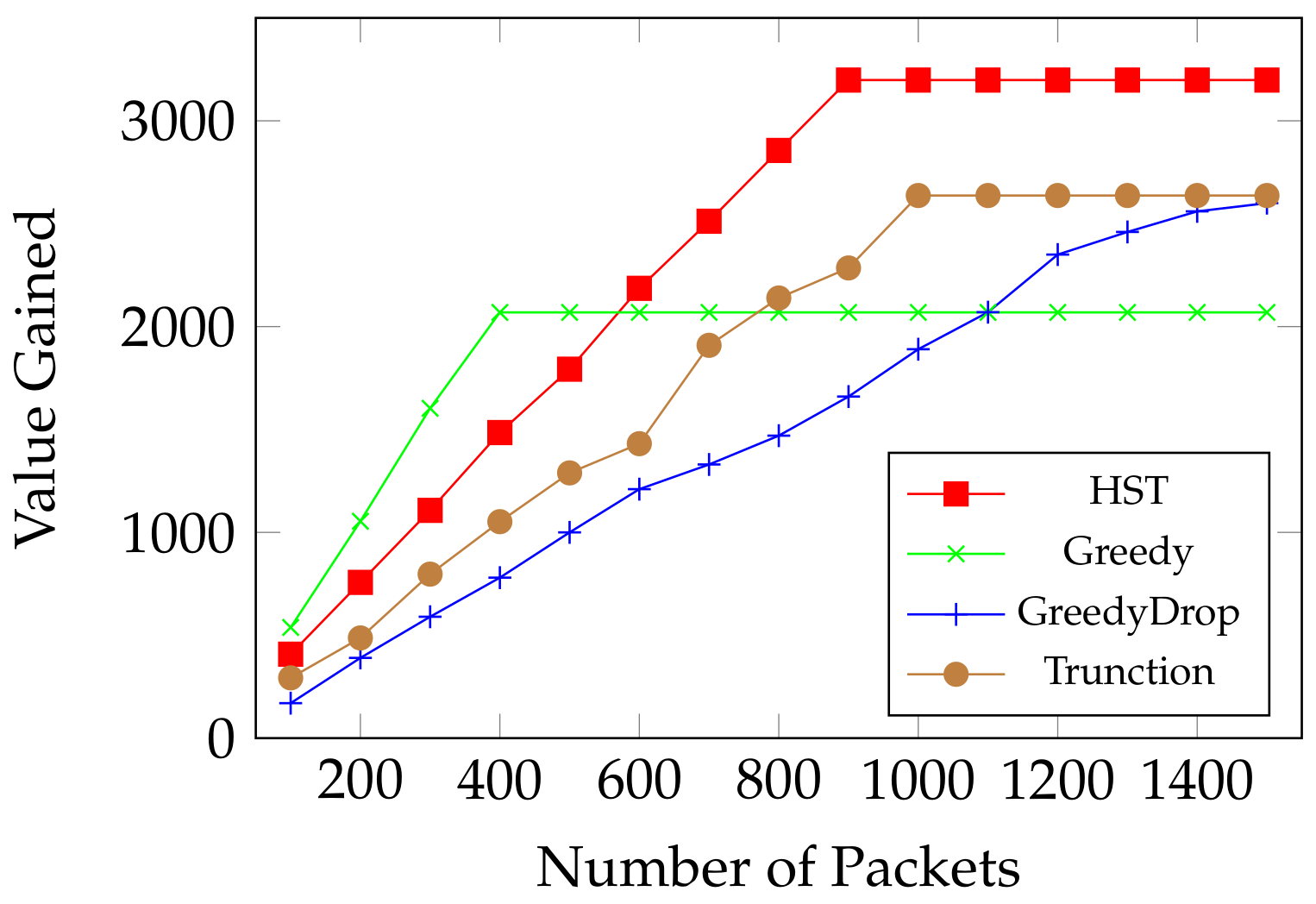
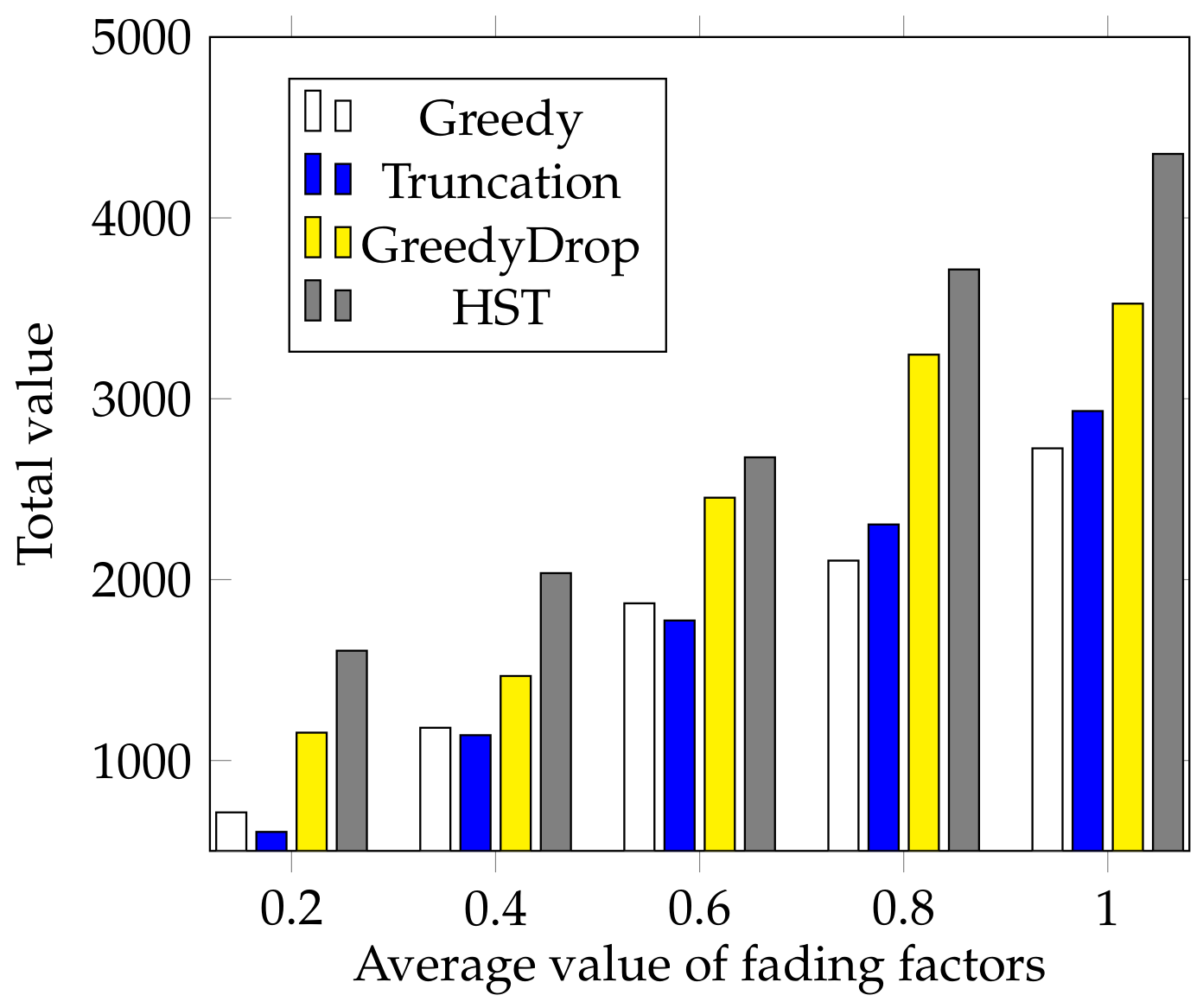
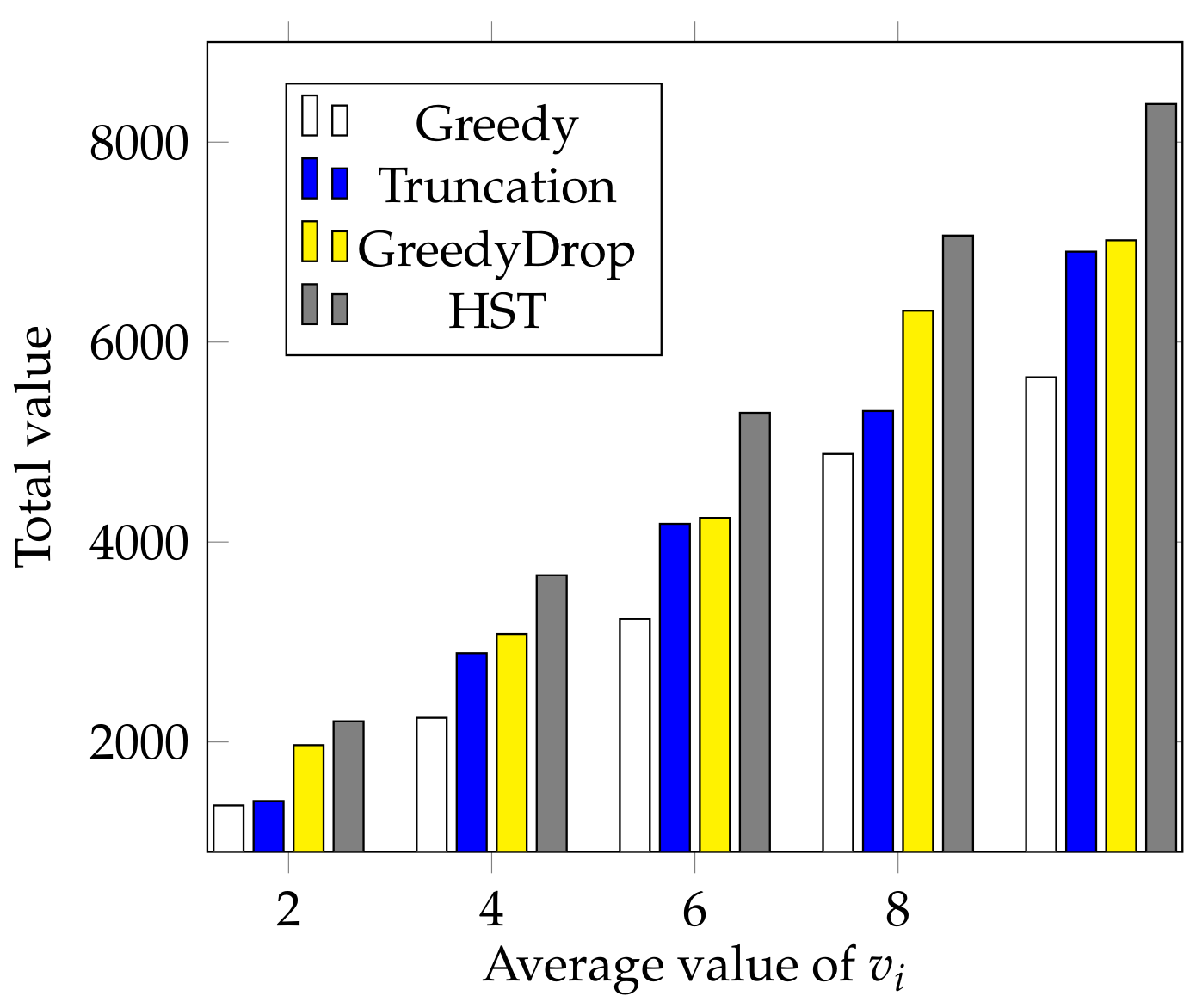
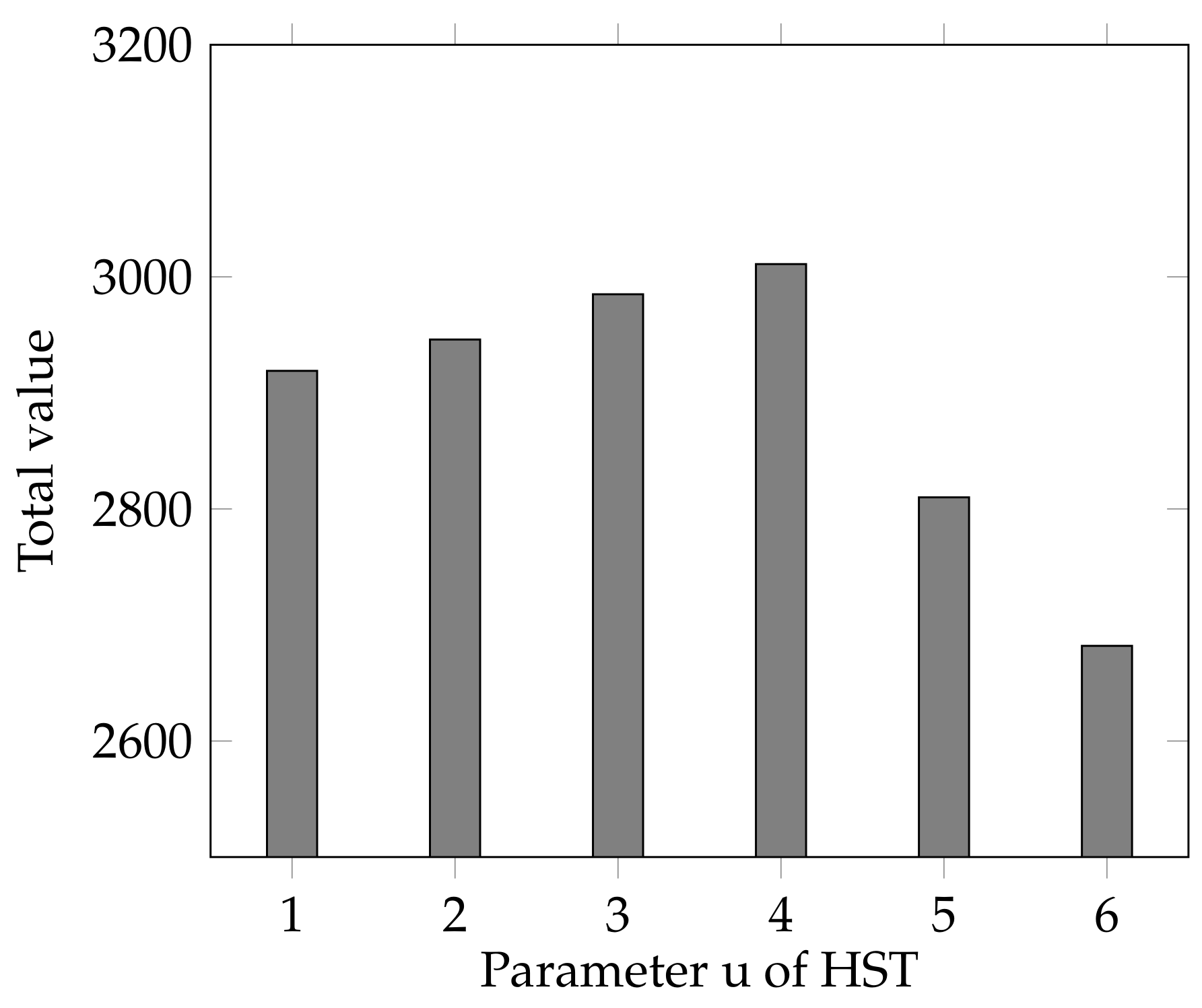
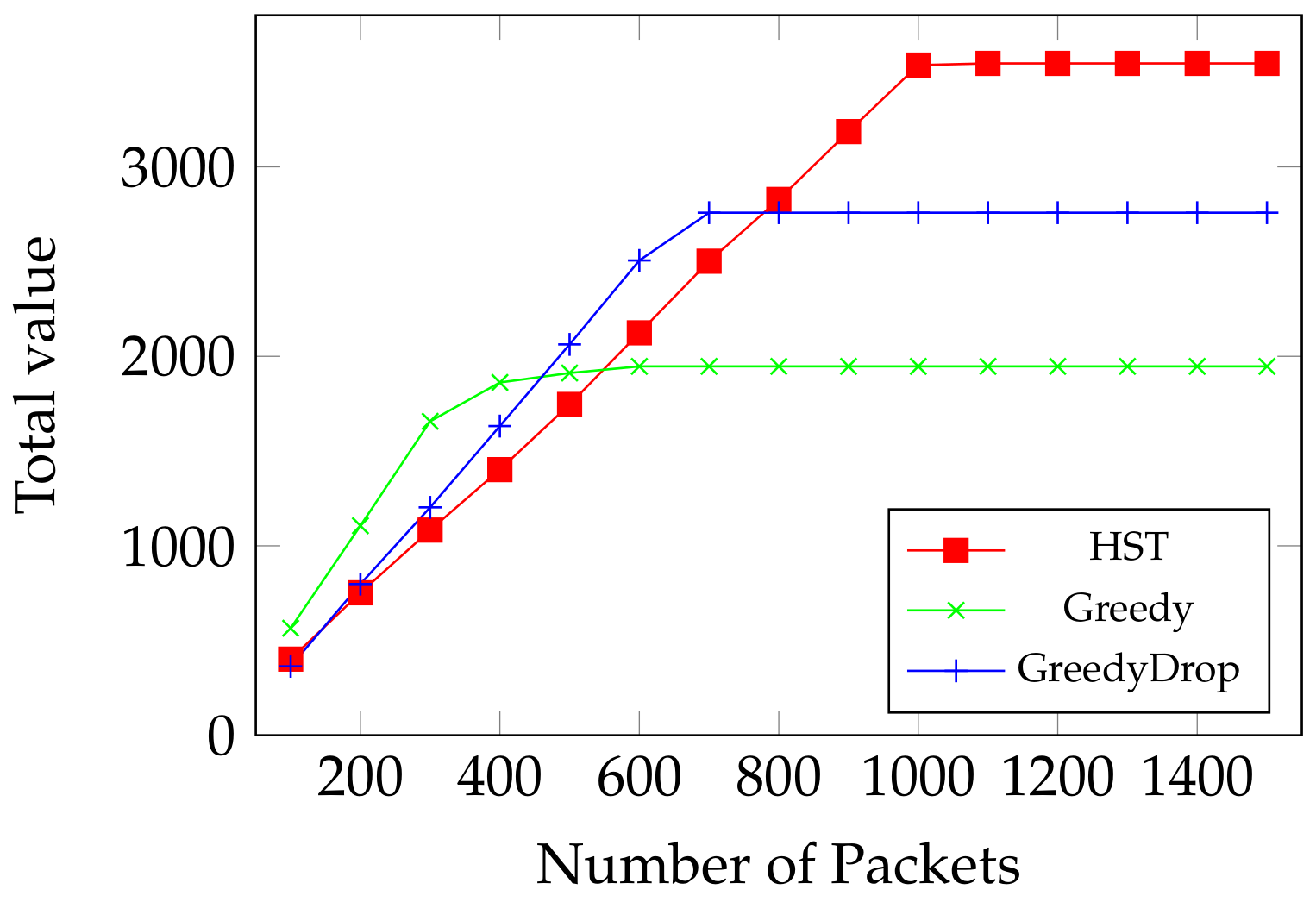
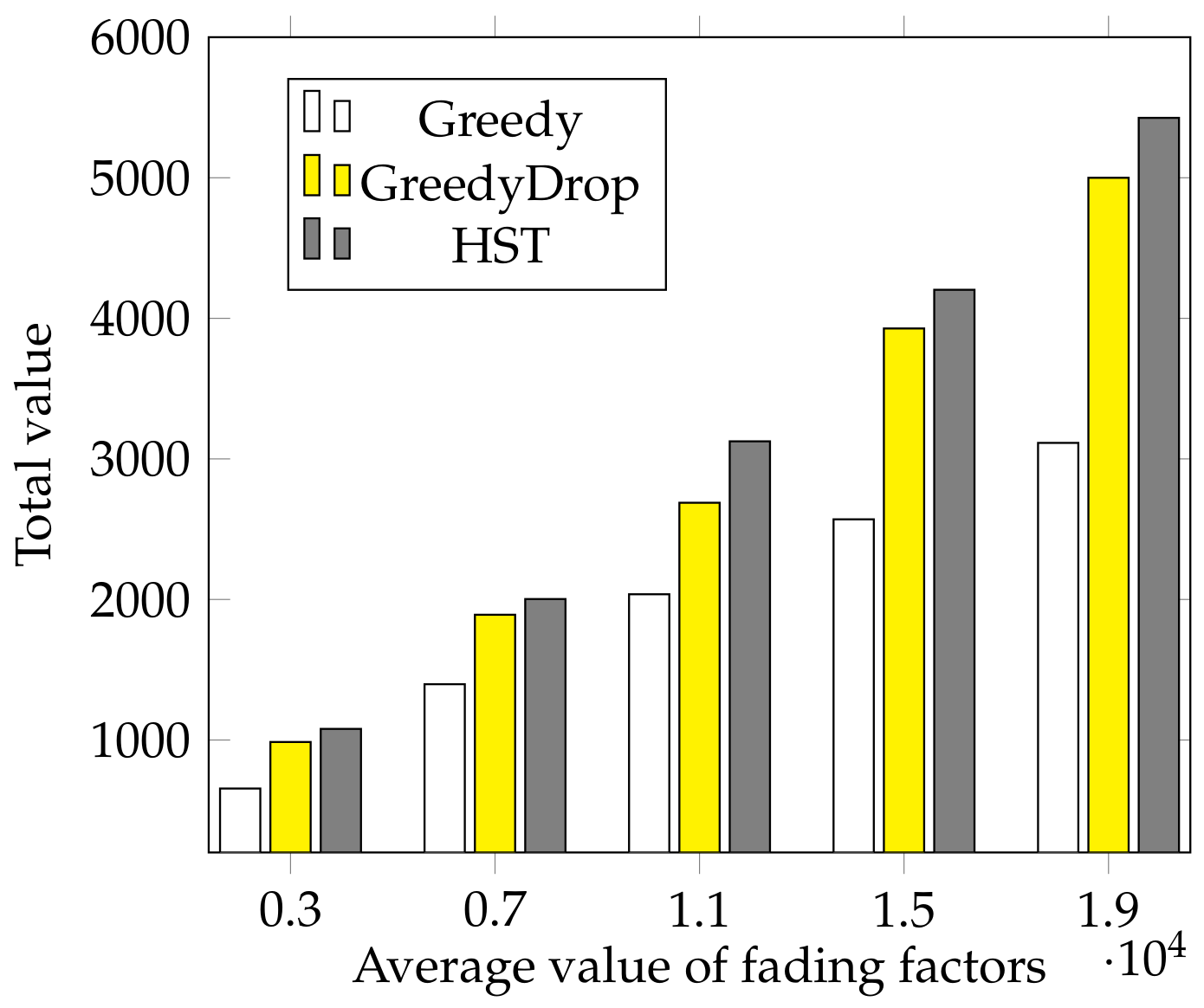
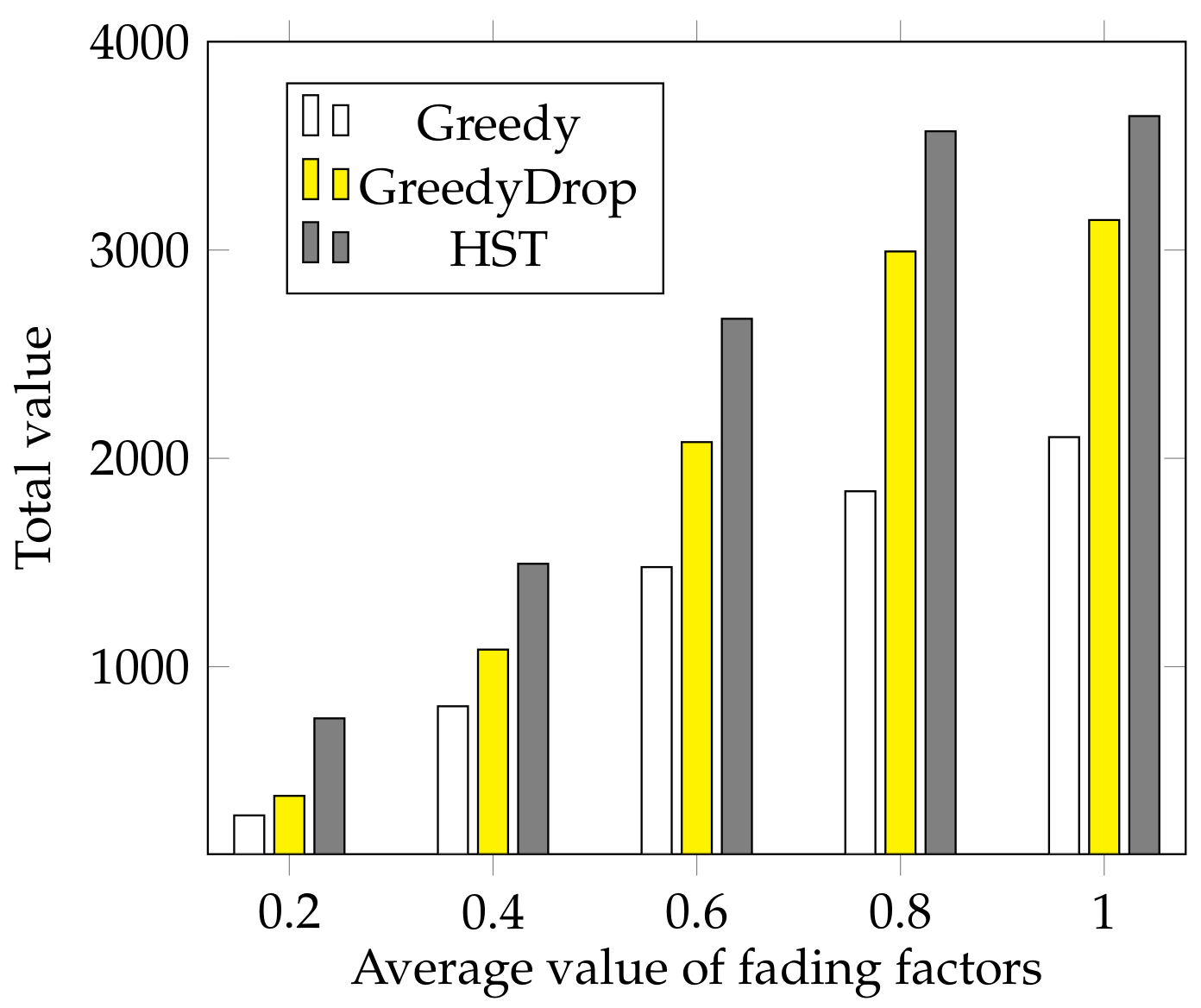
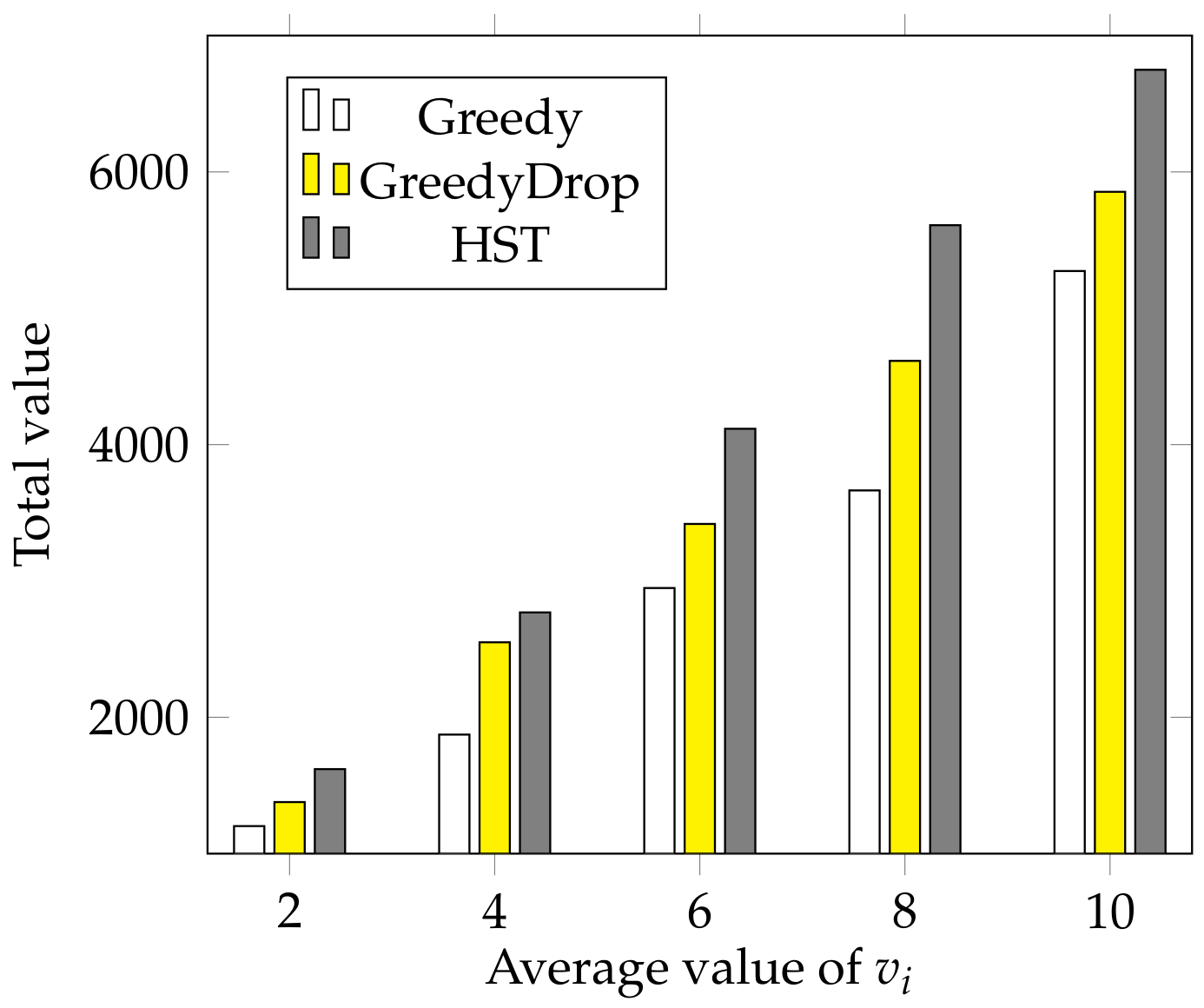
4.2. Simulations
- Greedy, which attempts to transmit all packets from their arrival time to their deadlines without waiting. For each packet that arrives, Greedy will immediately transmit the packet, and increase the transmission rate to the lowest needed in terms of deadlines based on the current schedule. This suggests that Greedy does not abandon packets unless there is not enough energy left.
- GreedyDrop, which is a schedule that improves Greedy by actively dropping packets on their arrivals if they have relatively low values. In detail, it abandons a task on its arrvial if its values is smaller than the median value of tasks chosen in the previous transmission.
- Truncation, which was originally developed to maximize the transmitted data bit but not the total value of integrally transmitted packets [12]. We modify it and make it work in our scenario by transmitting packets integrally. That is, the packet that was the earliest one executed in the previous transmission will be satisfied first in later transmission.
4.2.1. Simulation Results on FIFO Tasks
4.2.2. Simulation Results on Non-FIFO Tasks
5. Related Work
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Al-Turjman, F.; Ever, E.; Zahmatkesh, H. Green Femtocells in the IoT Era: Traffic Modeling and Challenges—An Overview. IEEE Netw. 2017, 31, 48–55. [Google Scholar] [CrossRef]
- Mahapatra, R.; Nijsure, Y.; Kaddoum, G.; Hassan, N.U.; Yuen, C. Energy Efficiency Tradeoff Mechanism Towards Wireless Green Communication: A Survey. IEEE Commun. Surv. Tutor. 2016, 18, 686–705. [Google Scholar] [CrossRef]
- Prabhakar, B.; Biyikoglu, E.U.; El Gamal, A. Energy-efficient transmission over a wireless link via lazy packet scheduling. IEEE/ACM Trans. Netw. 2001, 1, 386–394. [Google Scholar]
- Uysal-Biyikoglu, E.; Prabhakar, B.; El Gamal, A. Energy-efficient packet transmission over a wireless link. IEEE/ACM Trans. Netw. 2002, 10, 487–499. [Google Scholar] [CrossRef]
- Uysalbiyikoglu, E.; Gamal, A.E. On adaptive transmission for energy efficiency in wireless data networks. IEEE Trans. Inf. Theory 2004, 50, 3081–3094. [Google Scholar] [CrossRef]
- Zafer, M.A.; Modiano, E. A Calculus Approach to Energy-Efficient Data Transmission With Quality-of-Service Constraints. IEEE/ACM Trans. Netw. 2009, 17, 898–911. [Google Scholar] [CrossRef]
- Ozel, O.; Tutuncuoglu, K.; Yang, J.; Ulukus, S.; Yener, A. Resource management for fading wireless channels with energy harvesting nodes. Proc. IEEE INFOCOM 2011, 28, 456–460. [Google Scholar]
- Ozel, O.; Tutuncuoglu, K.; Yang, J.; Ulukus, S.; Yener, A. Transmission with Energy Harvesting Nodes in Fading Wireless Channels: Optimal Policies. IEEE J. Sel. Areas Commun. 2011, 29, 1732–1743. [Google Scholar] [CrossRef]
- Yang, J.; Ulukus, S. Transmission completion time minimization in an energy harvesting system. In Proceedings of the 2010 44th Annual Conference on Information Sciences and Systems, Princeton, NJ, USA, 17–19 March 2010; pp. 1–6. [Google Scholar]
- Fu, A.; Modiano, E.; Tsitsiklis, J.N. Optimal Transmission Scheduling over A Fading Channel with Energy and Deadline Constraints. IEEE Trans. Wirel. Commun. 2006, 5, 630–641. [Google Scholar] [CrossRef]
- Ahmed, N.; Khojestapour, M.A.; Baraniuk, R.G. Delay-limited throughput maximization for fading channels using rate and power control. In Proceedings of the GLOBECOM ’04 IEEE Global Telecommunications Conference, Dallas, TX, USA, 29 November–3 December 2004; Volume 6, pp. 3459–3463. [Google Scholar]
- Shan, F.; Luo, J.; Wu, W.; Li, M.; Shen, X. Discrete rate scheduling for packets with individual deadlines in energy harvesting systems. IEEE J. Sel. Areas Commun. 2015, 33, 438–451. [Google Scholar] [CrossRef]
- Wu, W.; Wang, J.; Wang, X.; Shan, F.; Luo, J. Online throughput maximization for energy harvesting communication systems with battery overflow. IEEE Trans. Mob. Comput. 2017, 16, 185–197. [Google Scholar] [CrossRef]
- Zafer, M.; Modiano, E. Optimal Rate Control for Delay-Constrained Data Transmission over a Wireless Channel. IEEE Trans. Inf. Theory 2008, 54, 4020–4039. [Google Scholar] [CrossRef]
- Erkal, H.; Ozcelik, F.M.; Antepli, M.A.; Bacinoglu, B.T.; Uysal-Biyikoglu, E. A Survey of Recent Work on Energy Harvesting Networks; Springer: London, UK, 2011; pp. 143–147. [Google Scholar]
- Chen, W.; Mitra, U.; Neely, M.J. Energy-Efficient Scheduling with Individual Delay Constraints over a Fading Channel. In Proceedings of the International Symposium on Modeling and Optimization in Mobile, Ad Hoc and Wireless Networks and Workshops, Limasso, Cyprus, 16–20 April 2007; pp. 601–618. [Google Scholar]
- Su, X.; Sun, E.; Li, M.; Yu, F.R.; Zhang, Y. A Survey on Energy Efficiency in Cellular Networks. Commun. Netw. 2013, 5, 654–660. [Google Scholar] [CrossRef]
- Li, G.Y.; Xu, Z.; Xiong, C.; Yang, C. Energy-efficient wireless communications: Tutorial, survey, and open issues. IEEE Wirel. Commun. 2011, 18, 28–35. [Google Scholar] [CrossRef]
- Yang, J.; Ulukus, S. Delay-Minimal Transmission for Energy Constrained Wireless Communications. In Proceedings of the IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 3531–3535. [Google Scholar]
- Chen, W.; Mitra, U. Energy Efficient Scheduling with Individual Packet Delay Constraints. In Proceedings of the International Conference on Computer Communications, Barcelona, Spain, 6–12 May 2006; pp. 1–12. [Google Scholar]
- Chen, W.; Neely, M.J.; Mitra, U. Energy Efficient Scheduling with Individual Packet Delay Constraints: Offline and Online Results. IEEE Trans. Inf. Theory 2008, 54, 2090–2109. [Google Scholar] [CrossRef]
- Shan, F.; Luo, J.; Shen, X. Optimal energy efficient packet scheduling with arbitrary individual deadline guarantee. Comput. Netw. 2014, 75, 351–366. [Google Scholar] [CrossRef]
- Gregori, M.; Payaro, M. Energy-Efficient Transmission for Wireless Energy Harvesting Nodes. IEEE Trans. Wirel. Commun. 2013, 12, 1244–1254. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Semantics |
|---|---|
| the set of packets needed transmission | |
| ith packet | |
| arrival time of | |
| deadline of | |
| workload of | |
| value of | |
| T | latest deadline in J |
| data transmission rate specified in time t | |
| energy allocated in time t | |
| fading factor in time t | |
| a binary variable representing whether a task is chosen or not | |
| the data amount of that is transmitted in time slot t | |
| water level specified in time t | |
| E | total amount of energy available for data transmission |
| Symbol | Semantics |
|---|---|
| randomly sampled from | |
| randomly sampled from | |
| randomly sampled from | |
| randomly sampled from | |
| generated according to a normal distribution | |
| E | 11,000J |
| Number of packets | 1500 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Dai, G.; Li, Y.; Shan, F. On Maximizing the Throughput of Packet Transmission under Energy Constraints. Sensors 2018, 18, 2018. https://doi.org/10.3390/s18072018
Wu W, Dai G, Li Y, Shan F. On Maximizing the Throughput of Packet Transmission under Energy Constraints. Sensors. 2018; 18(7):2018. https://doi.org/10.3390/s18072018
Chicago/Turabian StyleWu, Weiwei, Guangli Dai, Yan Li, and Feng Shan. 2018. "On Maximizing the Throughput of Packet Transmission under Energy Constraints" Sensors 18, no. 7: 2018. https://doi.org/10.3390/s18072018
APA StyleWu, W., Dai, G., Li, Y., & Shan, F. (2018). On Maximizing the Throughput of Packet Transmission under Energy Constraints. Sensors, 18(7), 2018. https://doi.org/10.3390/s18072018