Space Subdivision in Indoor Mobile Laser Scanning Point Clouds Based on Scanline Analysis



Abstract
1. Introduction
2. Related Work
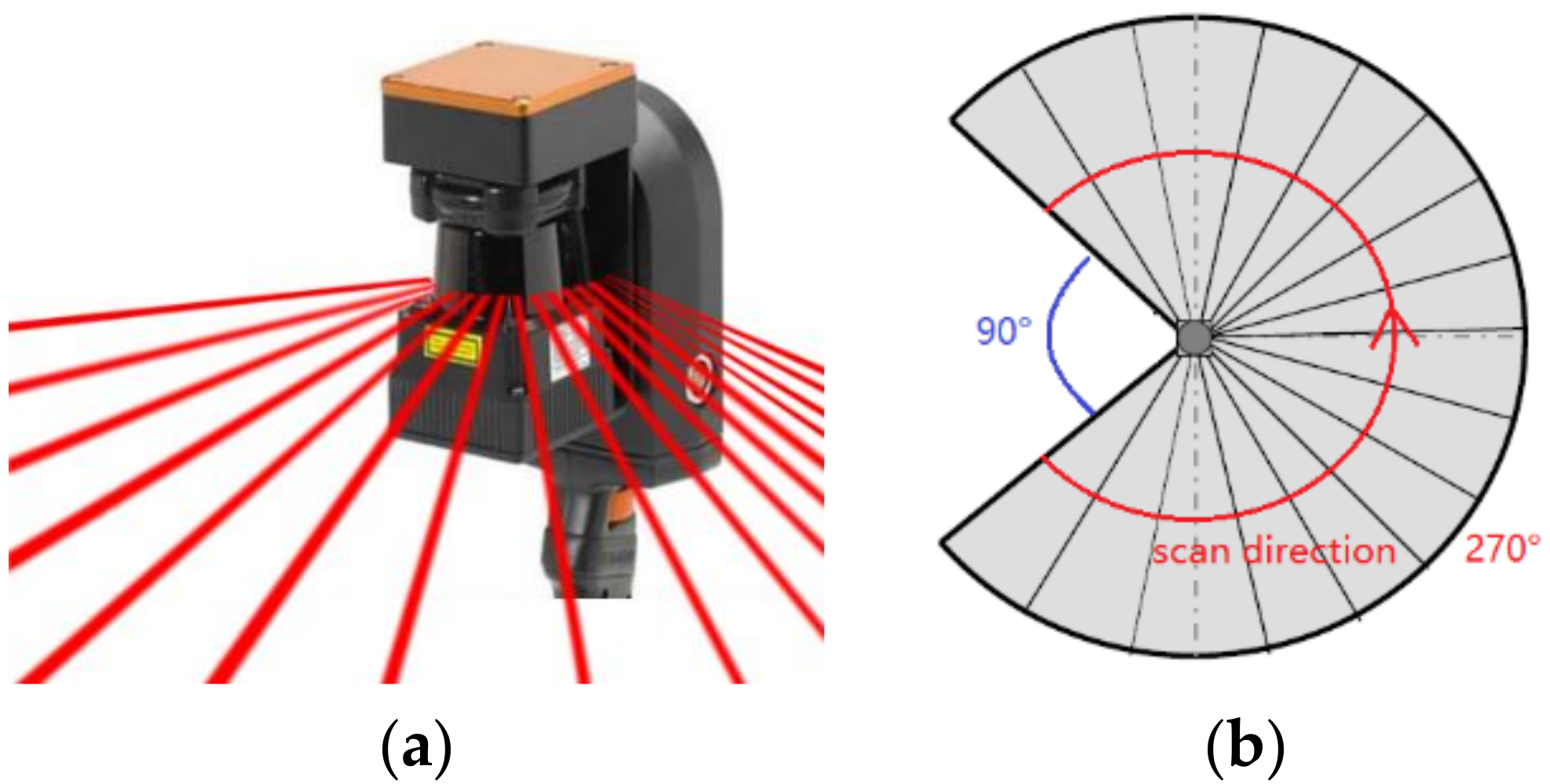
3. Instruments and Data
4. Methods
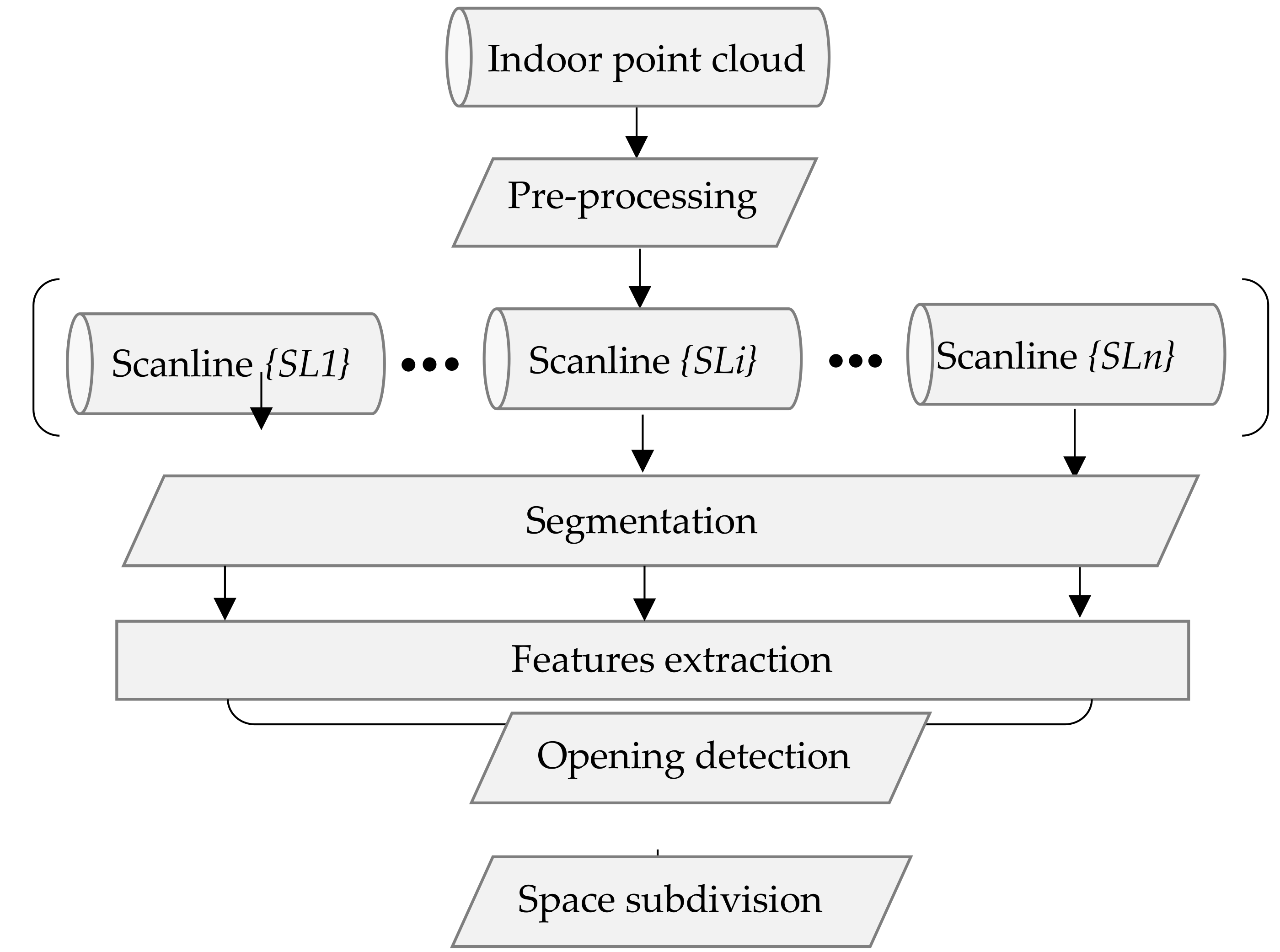
4.1. Pre-Processing
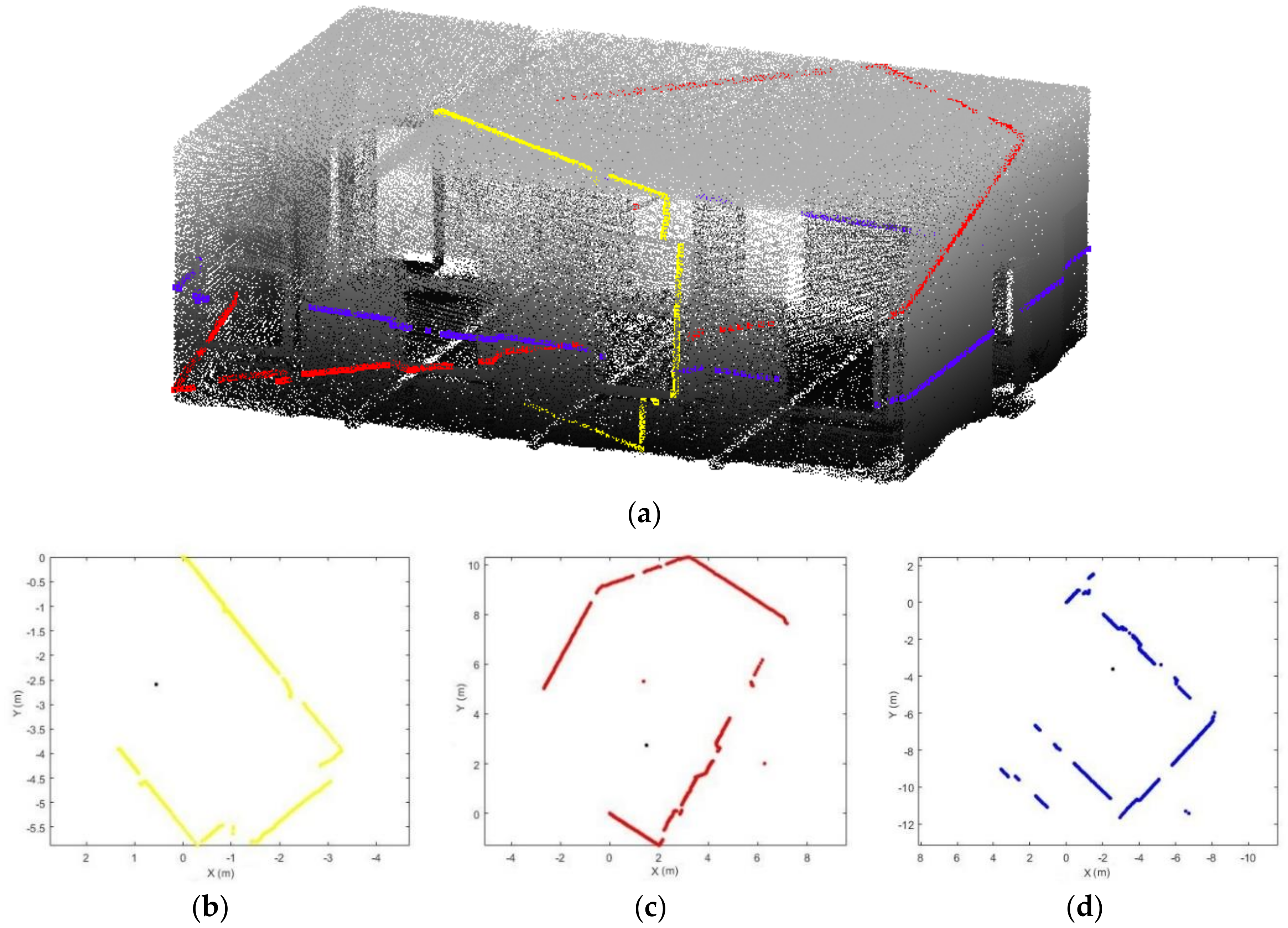
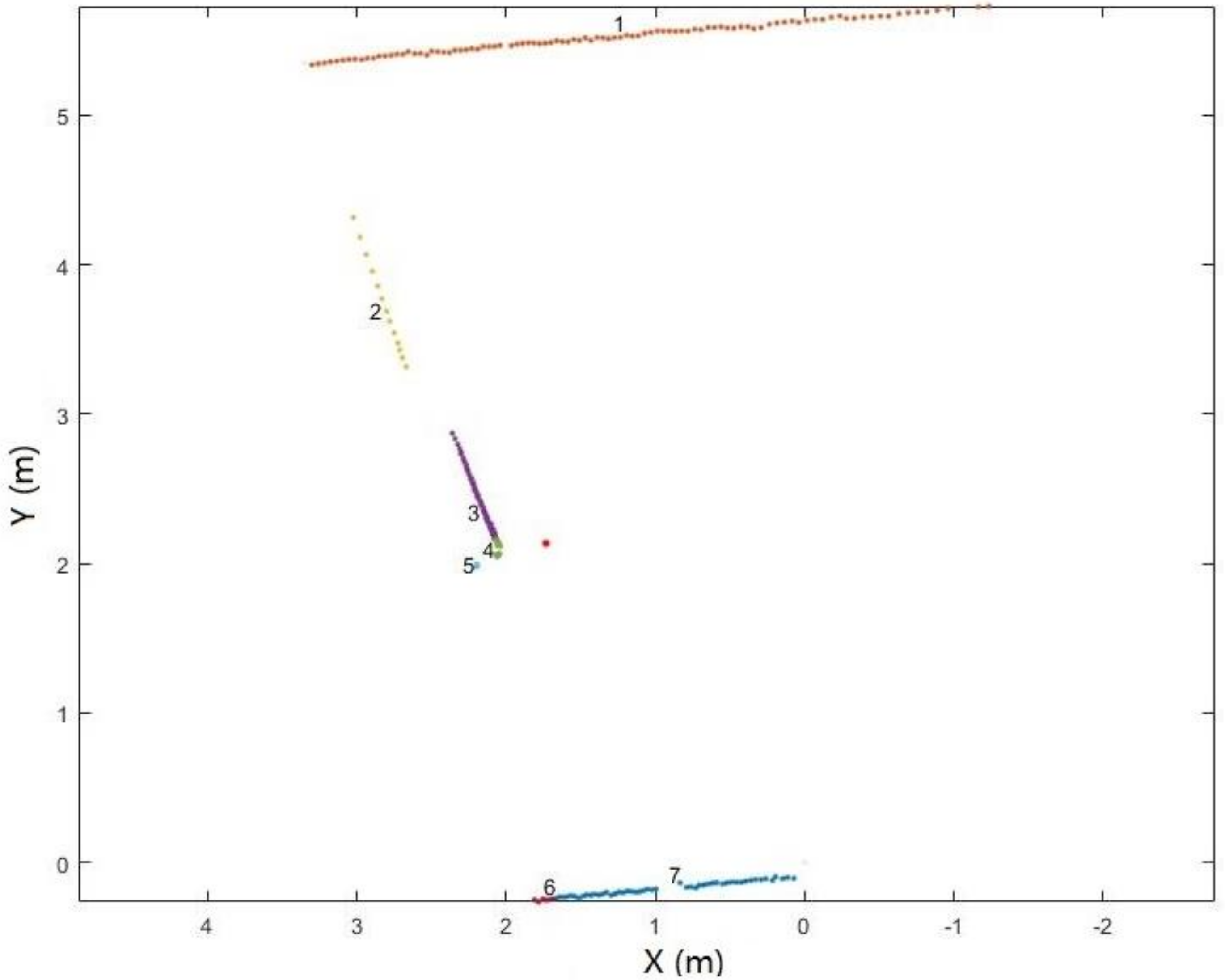
4.2. Segmentation
4.3. Feature Generation
- (1)
- Segment length Li: The Euclidean distance between first point and last point of segment i;
- (2)
- Segment size Si: The number of points in the segment i;
- (3)
- Normal vector and line vector: To estimate the normal vector and the line vector, we use PCA (principal component analysis) of the points contained in the segment;
- (4)
- Distance between scanner location and endpoints li: The Euclidean distance between scanner location and endpoint (first point or last point according to time attribute) of segment i.
- (1)
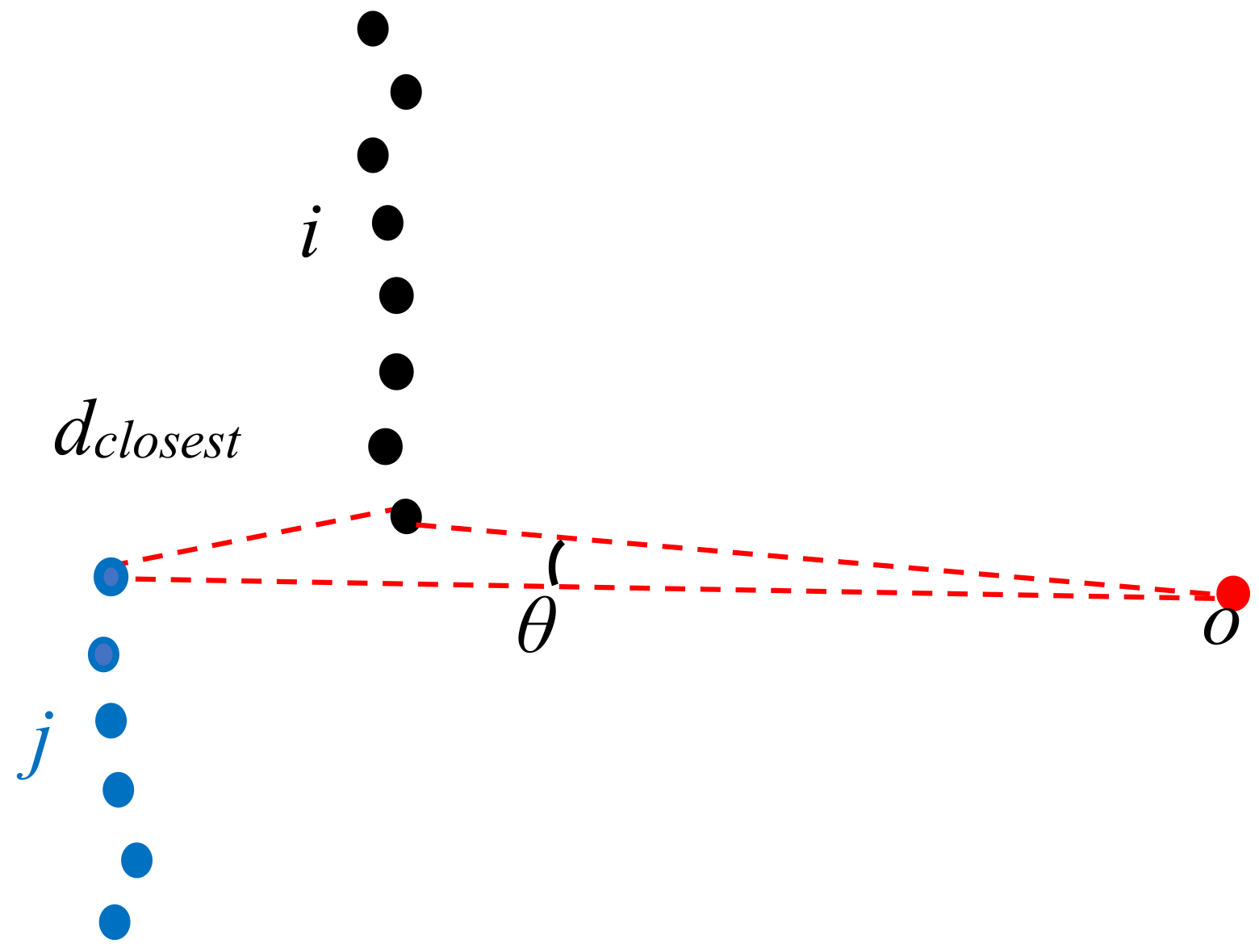
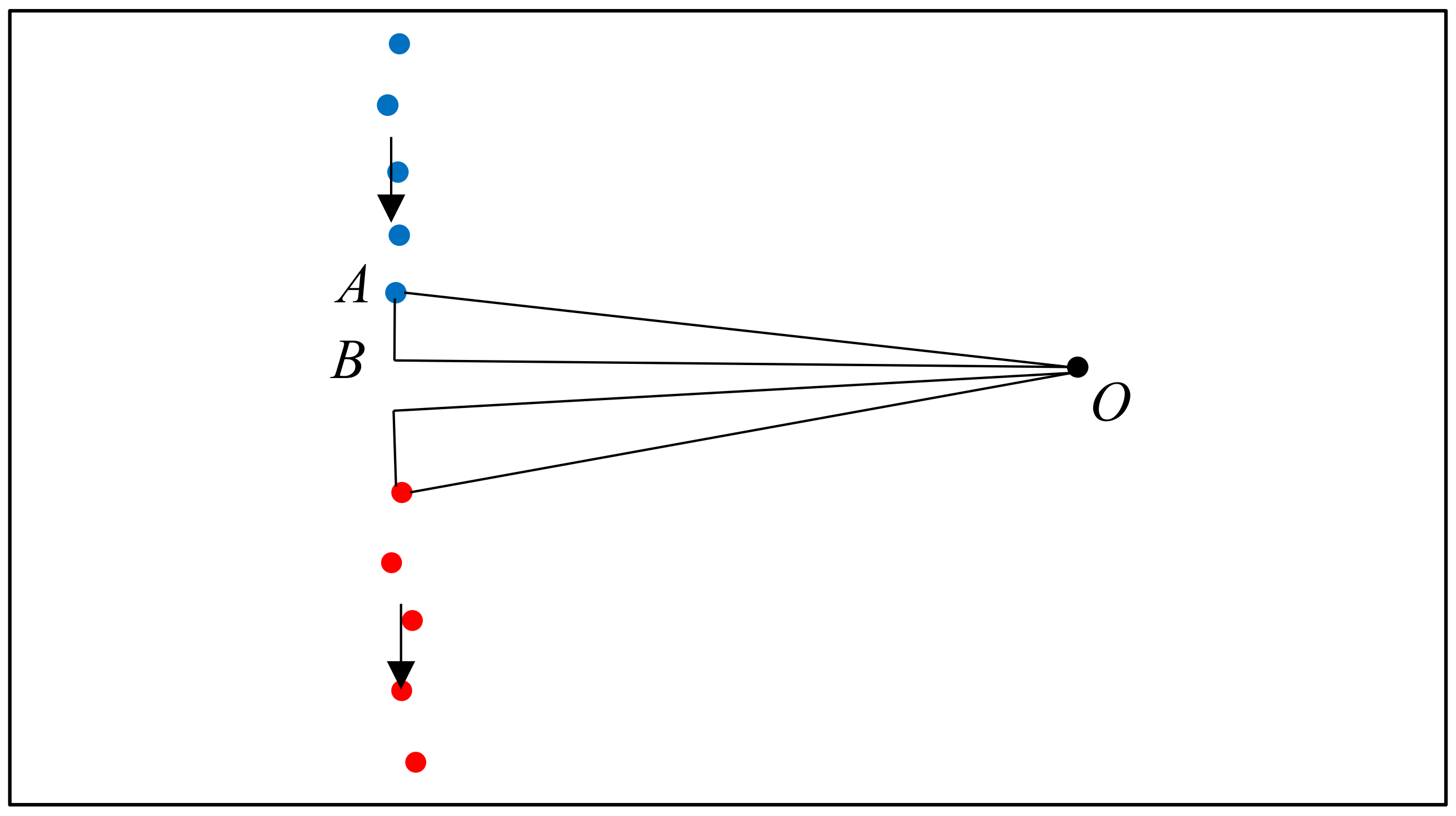
- The scanning angle between segments θ: The angle is intuitively illustrated in Figure 6 and defined using the scanner position as the vertex, and the nearest point of a pair of segments on the legs;
- (2)
- Perpendicular and parallel: relations between a pair of segments can be determined based on the included angle of the normal vector and a range variable of 4° is considered in this case. Since it is rare to find perpendicular/parallel definitely.
- (3)
- Closest distance between neighbour segments dclosest: The Euclidean distance between the nearest points of segment i and j.
4.4. Opening Detection
- Generation of opening candidates based on a single scanline (in the scanner coordinate system).
- Determination of the openings by joining multiple scanlines in the analysis (in the local coordinate system).
4.4.1. Opening Candidate Generation
- and are neighbor segments.
- The scanning angle between these segments should be larger than .
- The closest distance between and should be larger than .
- and are not neighboring segments.
- Find the segments between and . Let represent the mean Euclidean distance between the centroid of these segments and the scanner position and represent the mean distance between the closest endpoint of the two collinear segments and the scanner position. The segments between and normally belong to another space. Therefore, should be longer than .
- The closest segment should also belong to another space. Therefore, the minimum distance of the segment between the two collinear segments should be longer than .
- The distance of the opening segments should be longer than .
4.4.2. Optimal Opening Determination
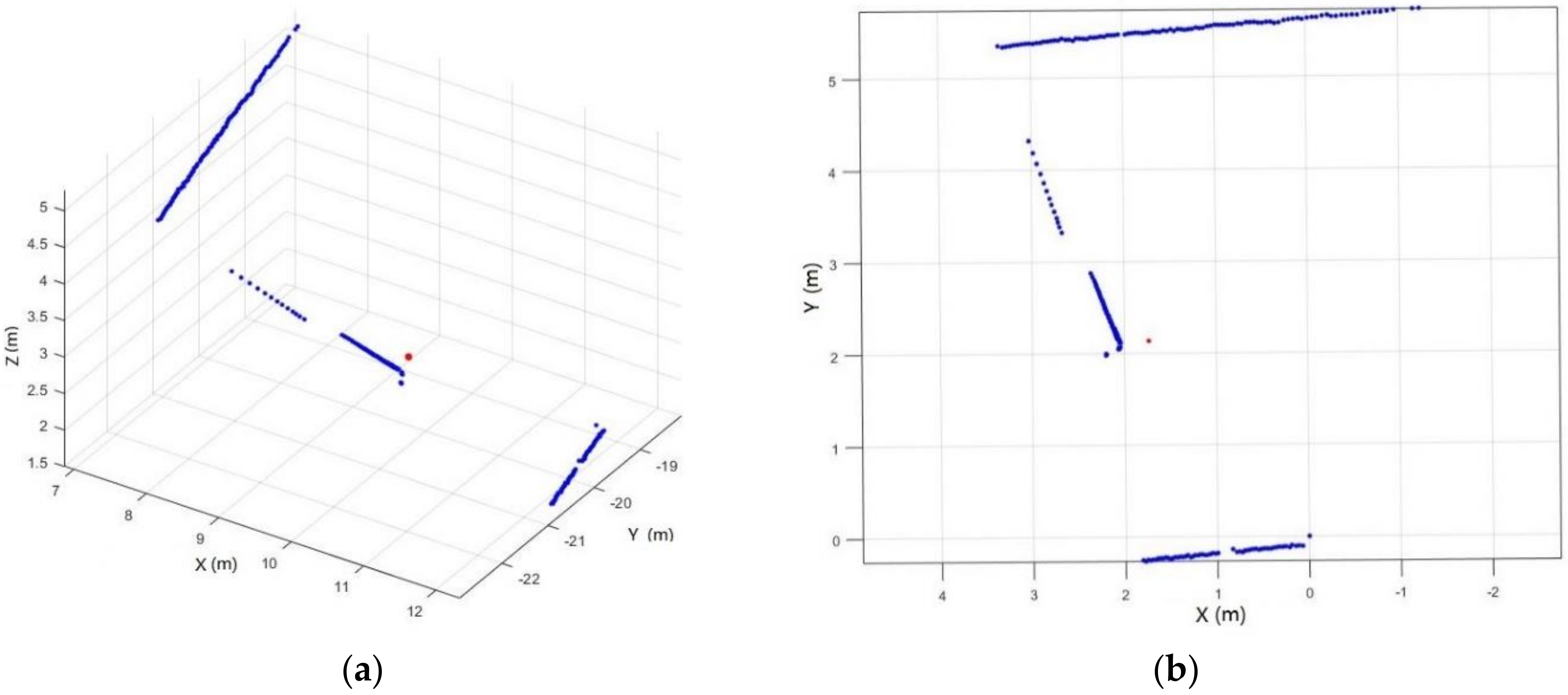
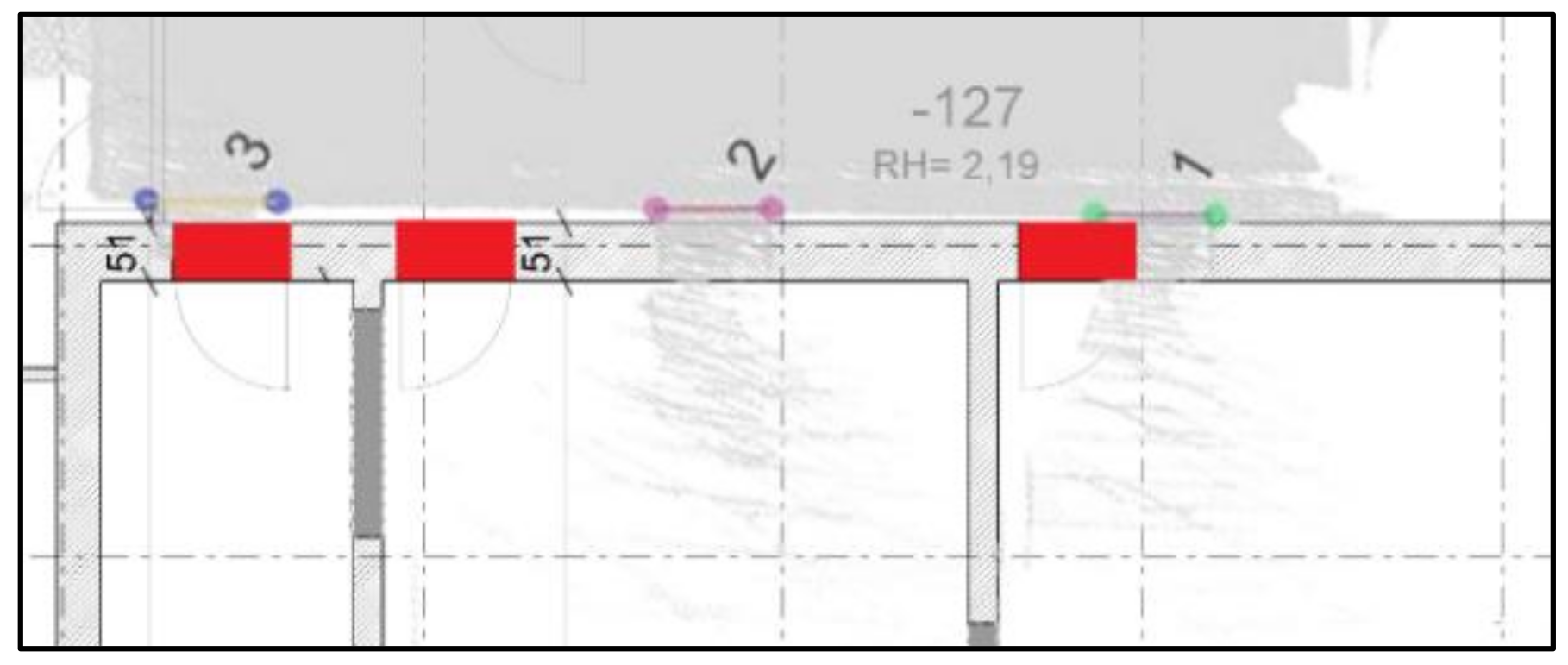
- As mentioned above, each opening candidate contains two points. For analysis of the points on the same side, we define the point a as the point with the smaller x coordinate and point b as the point with the larger one. In order to prevent the situation where two endpoints have the same x coordinate, we set point a as the point with the smaller y value when the difference of the x coordinates is smaller than 0.01 m. The extracted door frame points in the xy-plane of the local coordinate system are shown in Figure 9.
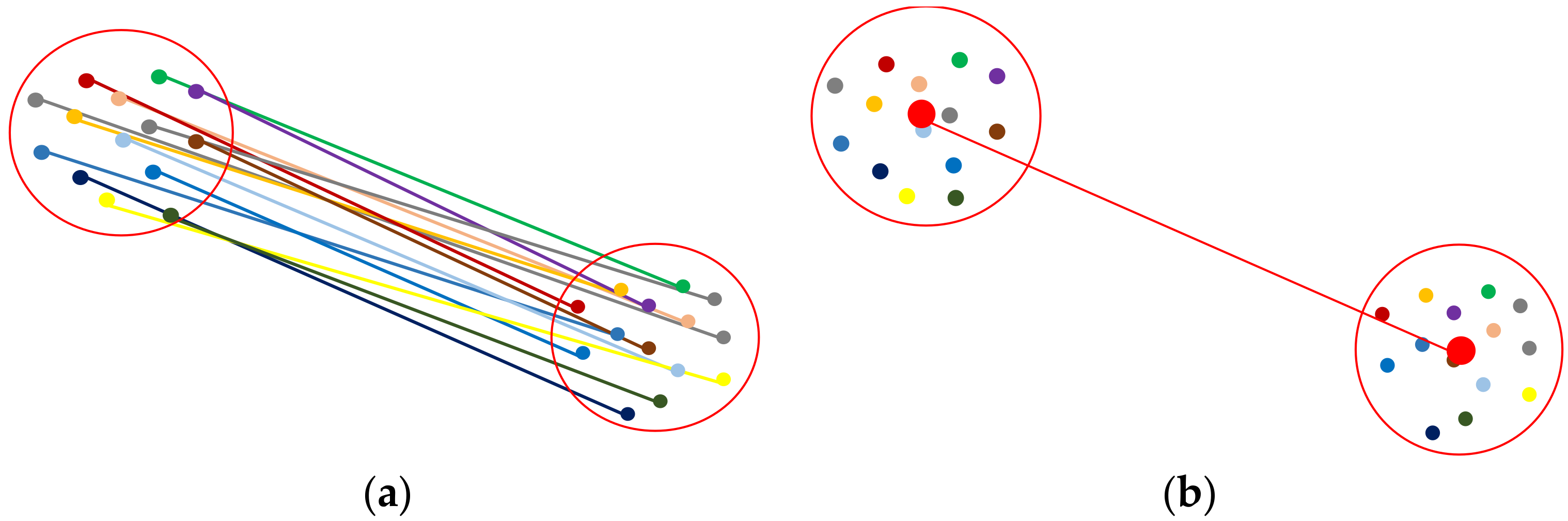
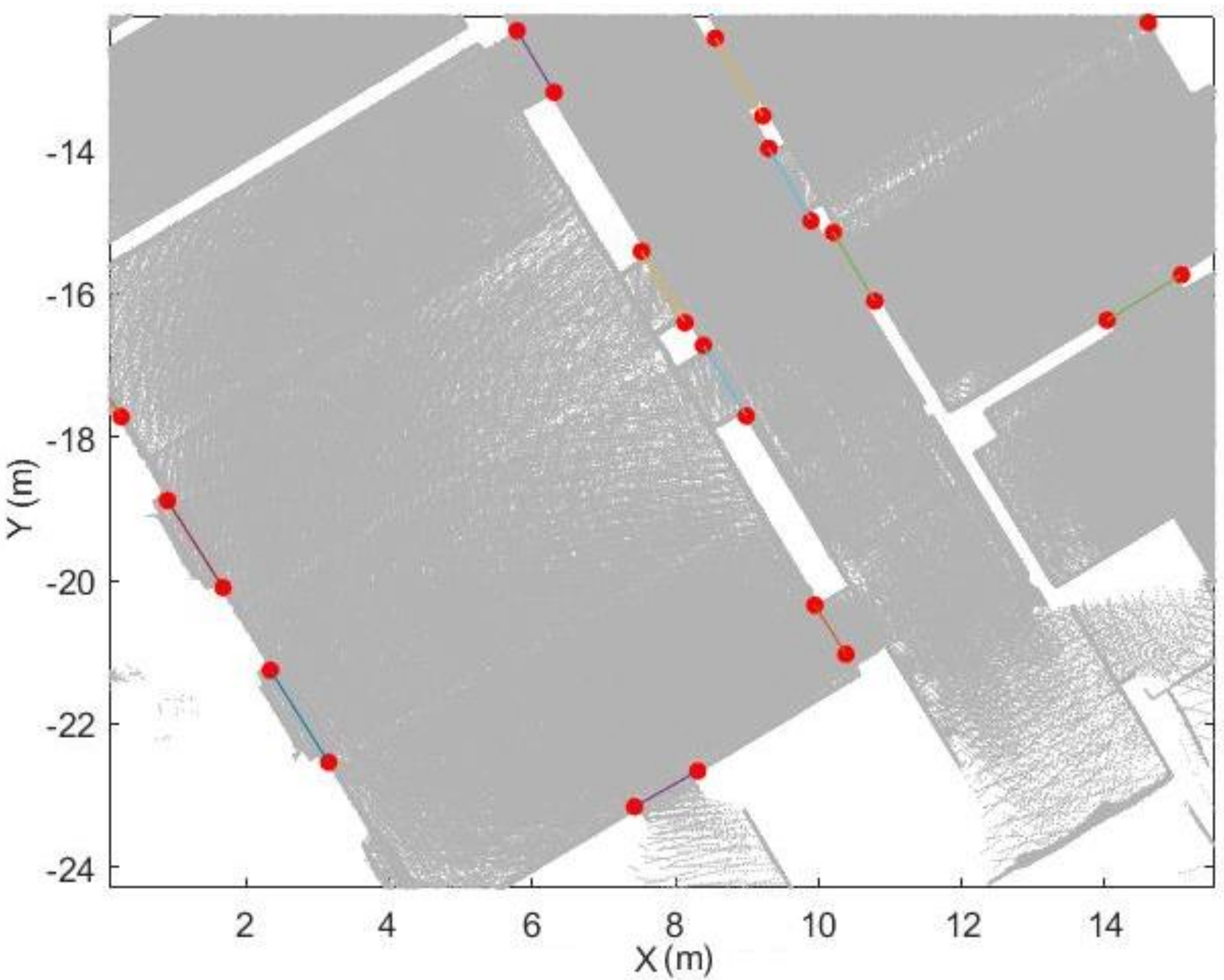
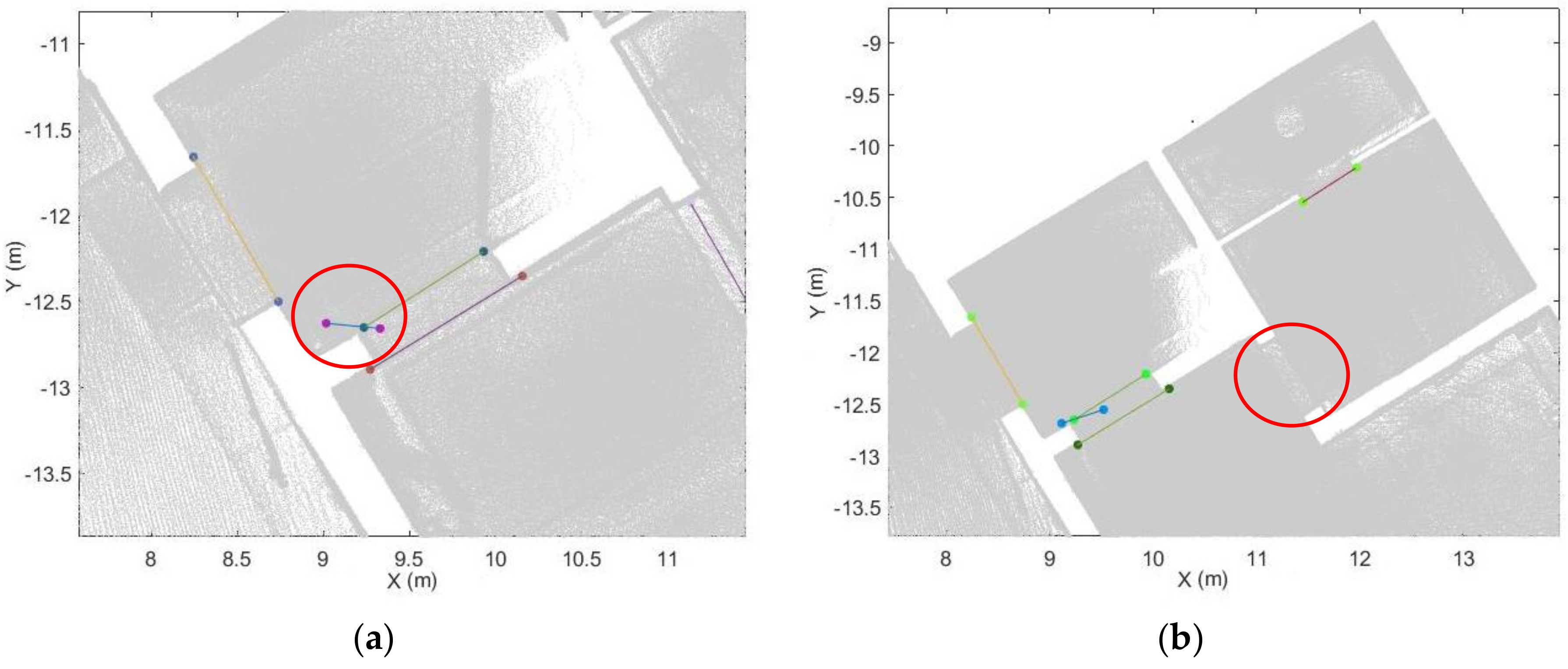
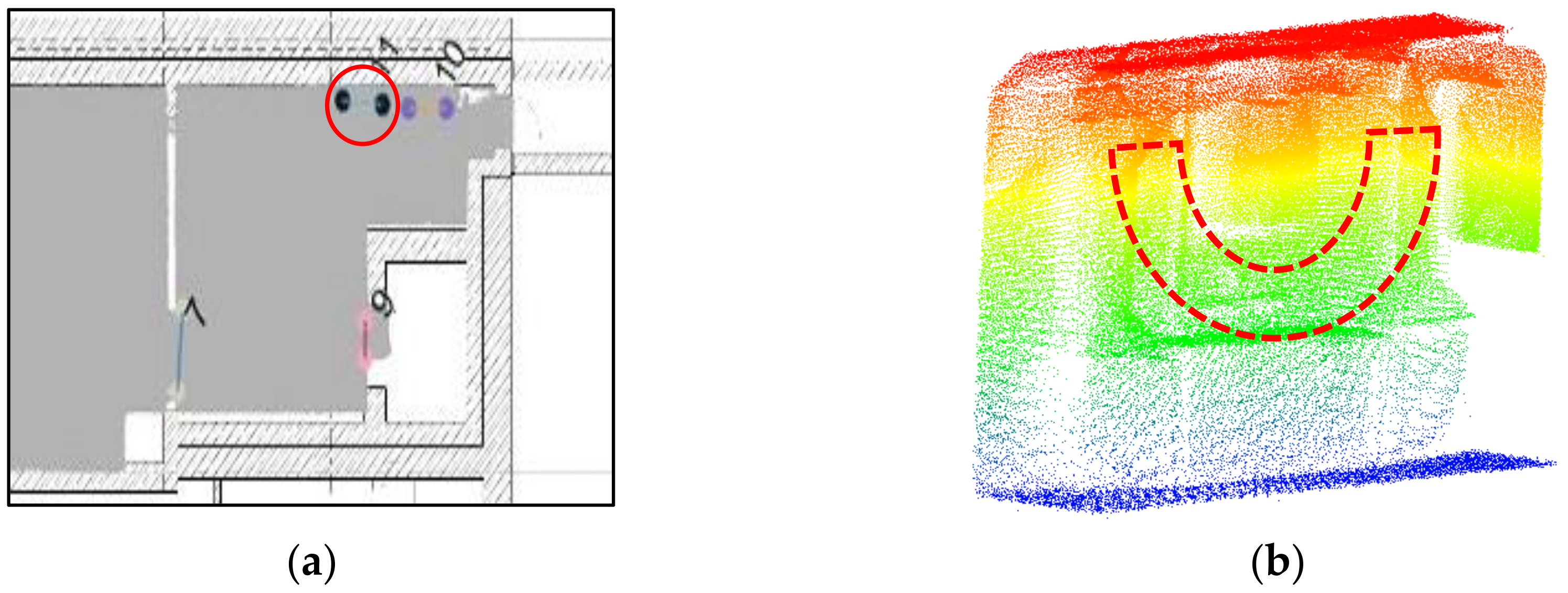
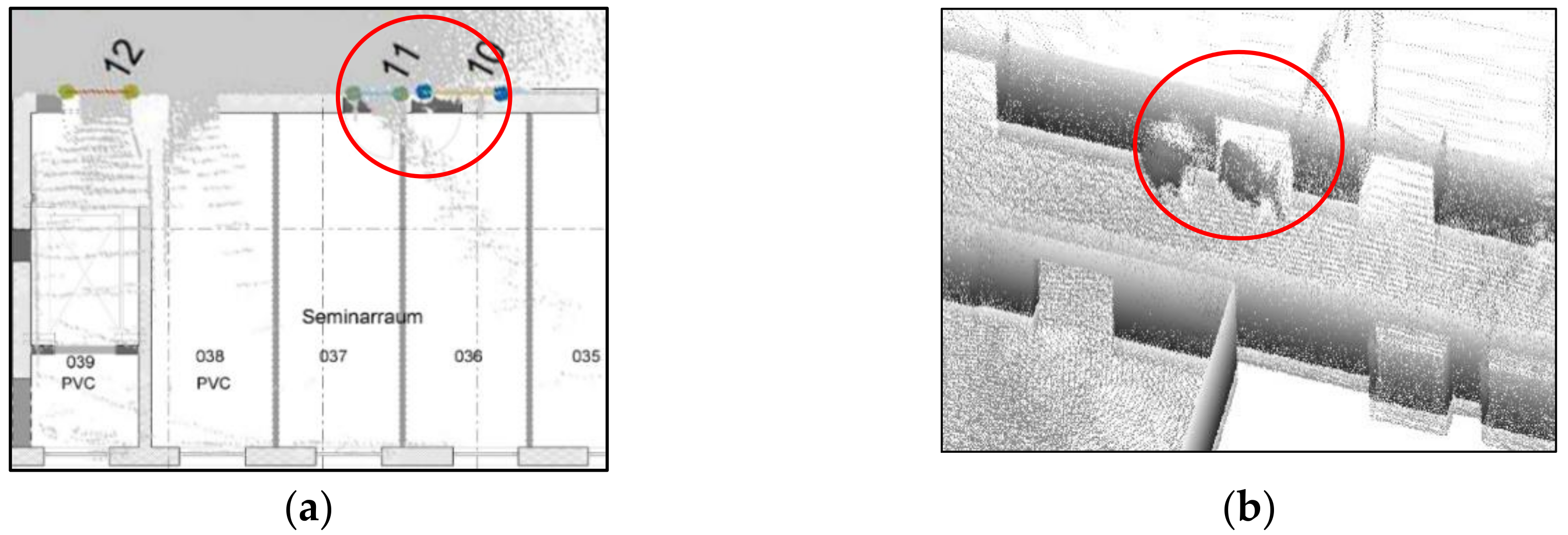
- We construct a buffer with radius for all points a and points b (red circle in Figure 10). If more than points are in the same buffer for both corresponding points, we compute the location of the opening as the mean coordinates of all points in the buffers around point a and point b (red point in Figure 10b). The opening segment will be saved as these two points. This step will remove incorrect points while retaing the optimal openings. Nevertheless, the weakness of this step is that it leads to false positive results (as shown in Figure 11).
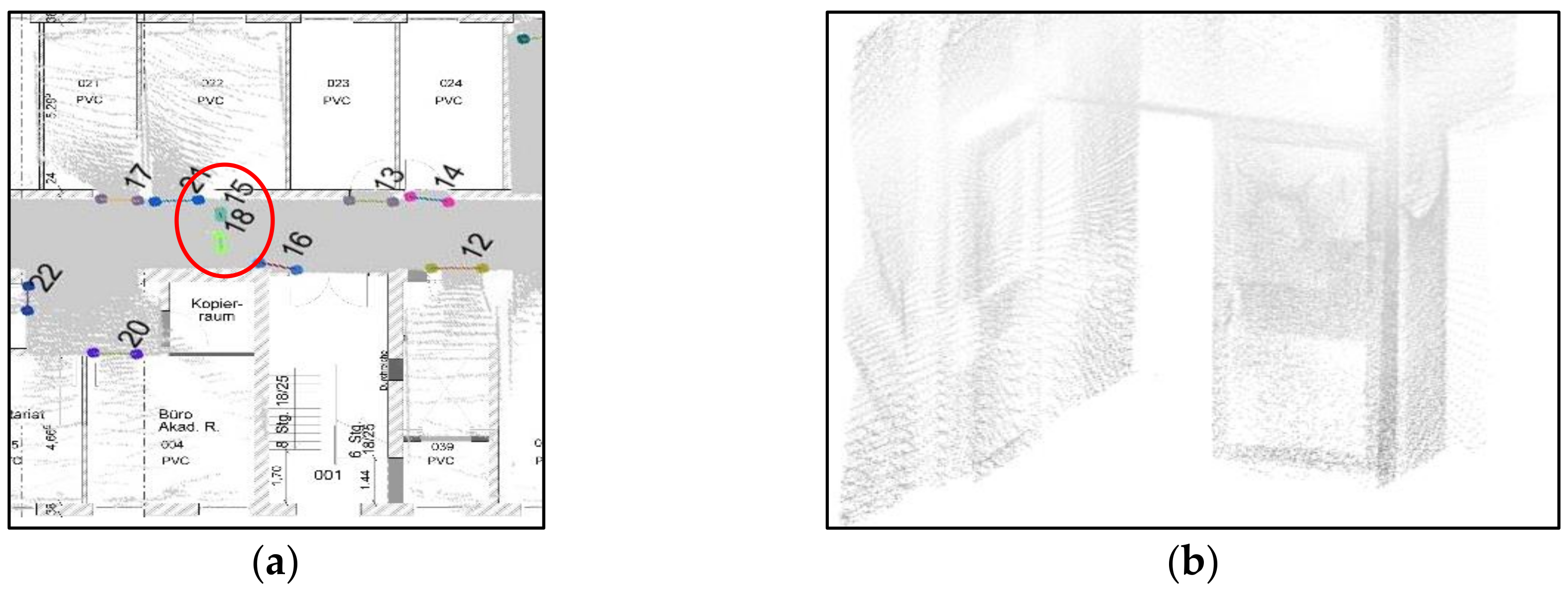
- To refine the results of Step 2, a new buffer with radius is used to merge the extracted doorframe points. If more than one openings are contained within the same buffer, we use the mean coordinates of these openings as the location of the opening. An example result of this step shows in Figure 12.
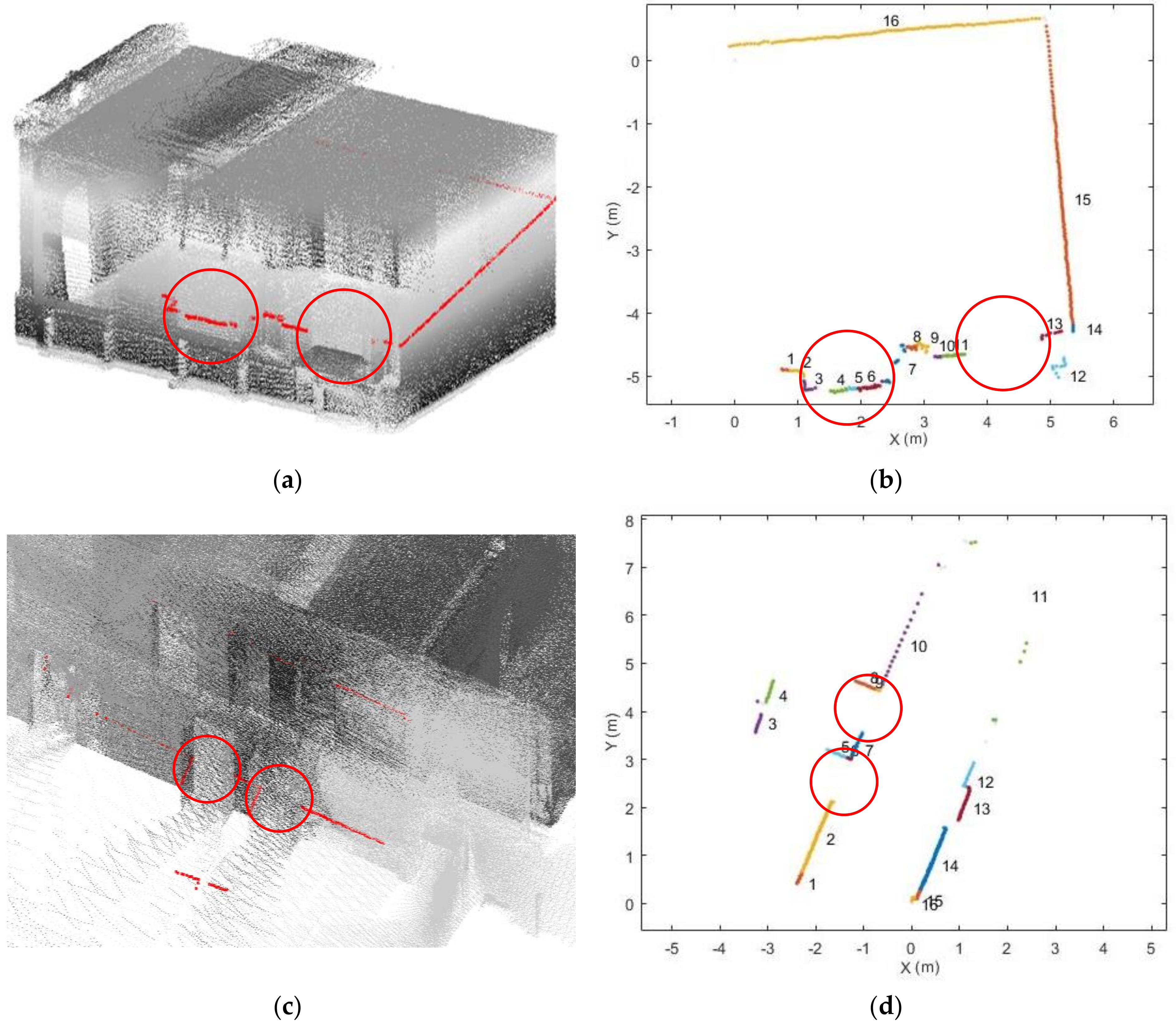
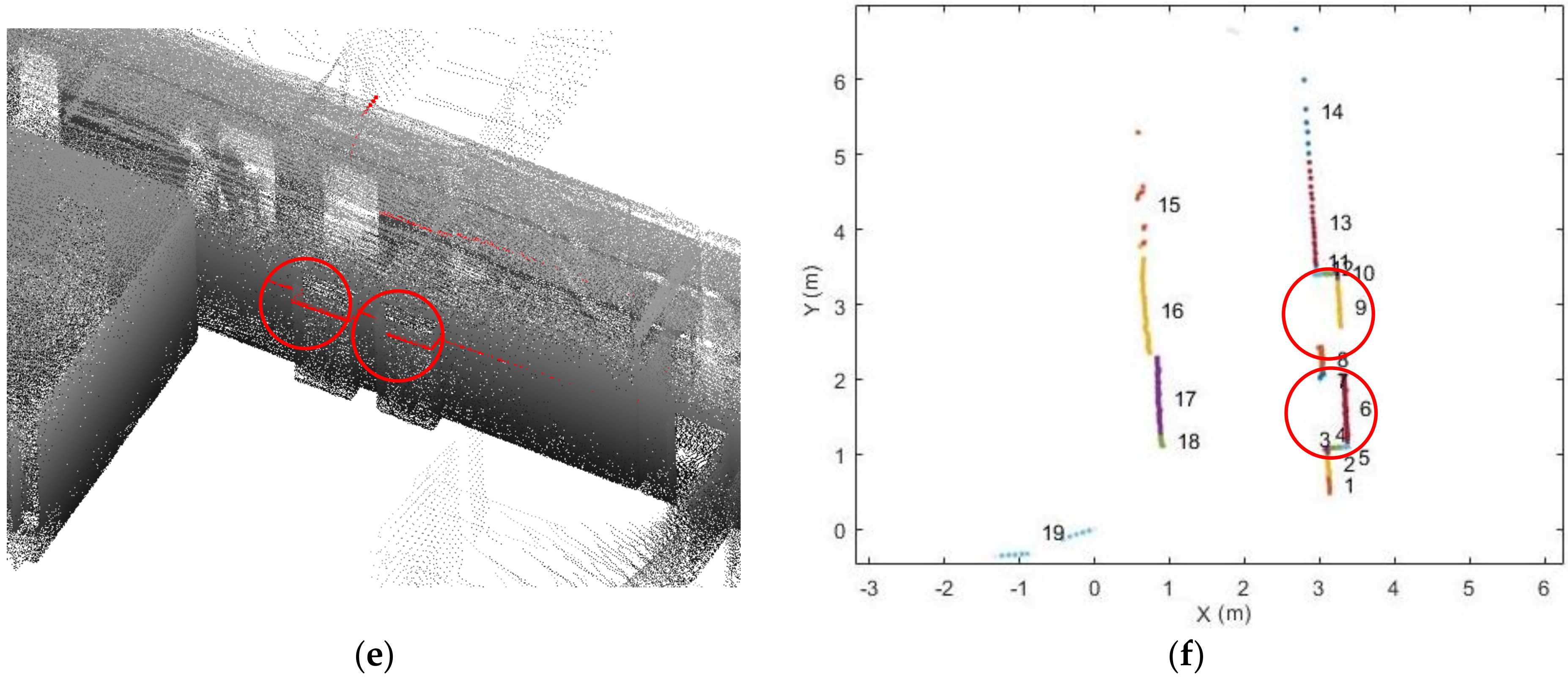
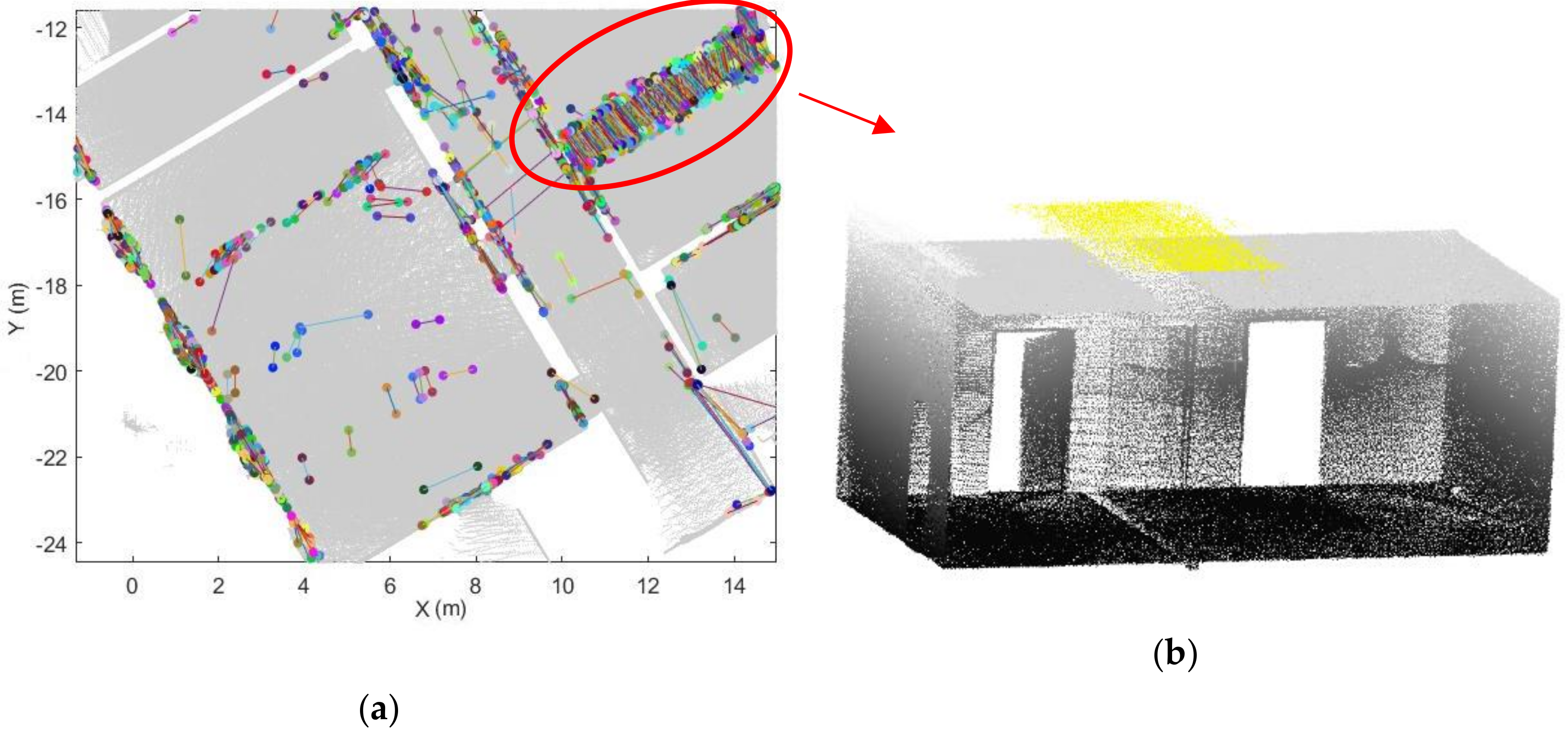
- The extraction method assumes that the opening plane in 3D space is oriented vertically. However, certain horizontal gaps (see yellow plane in Figure 13b) may also meet the rules of opening candidate detection. In this case, the proposed constraints will extract multiple opening candidates in this area (red circle in Figure 13a) which may lead wrong detection result. In order to solve this problem, we remove the detected openings acquired by number of point with low height variance.
4.5. Space Subdivision
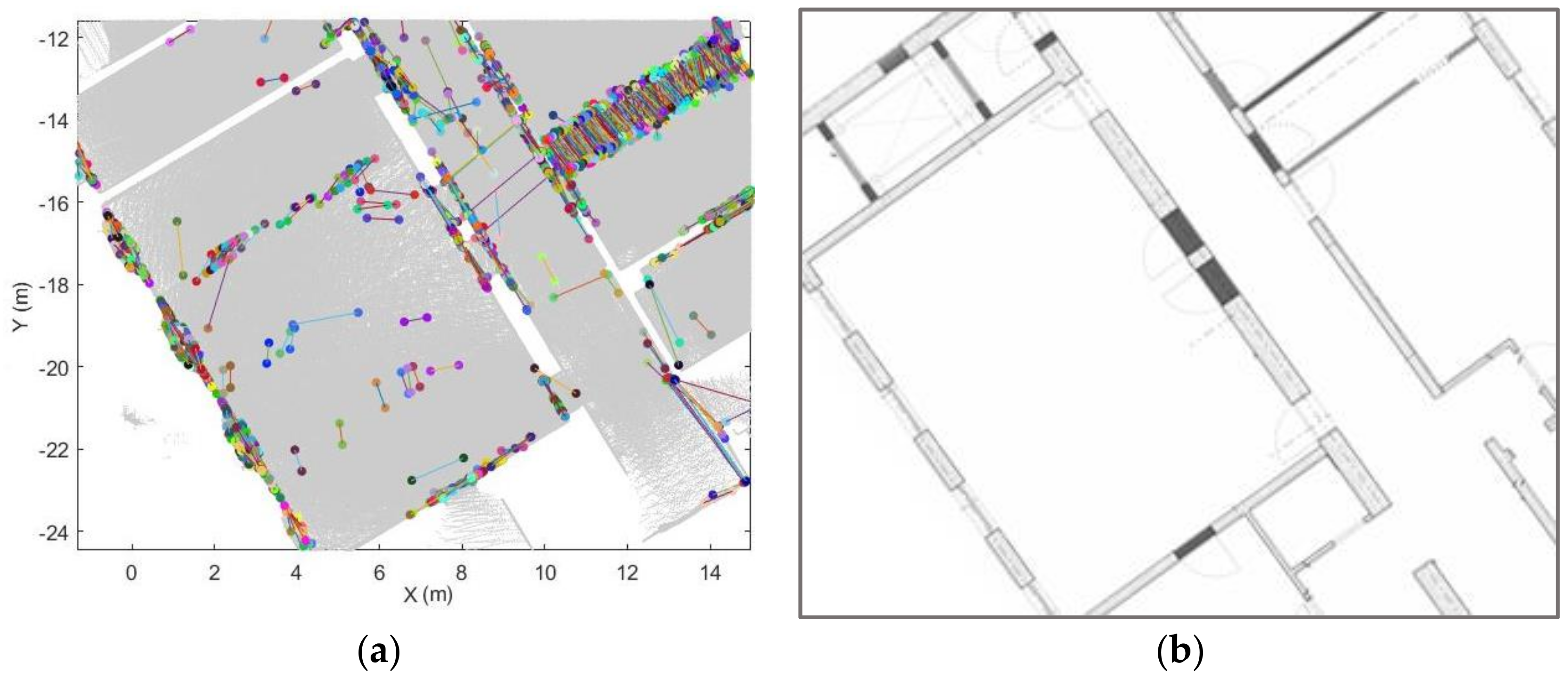
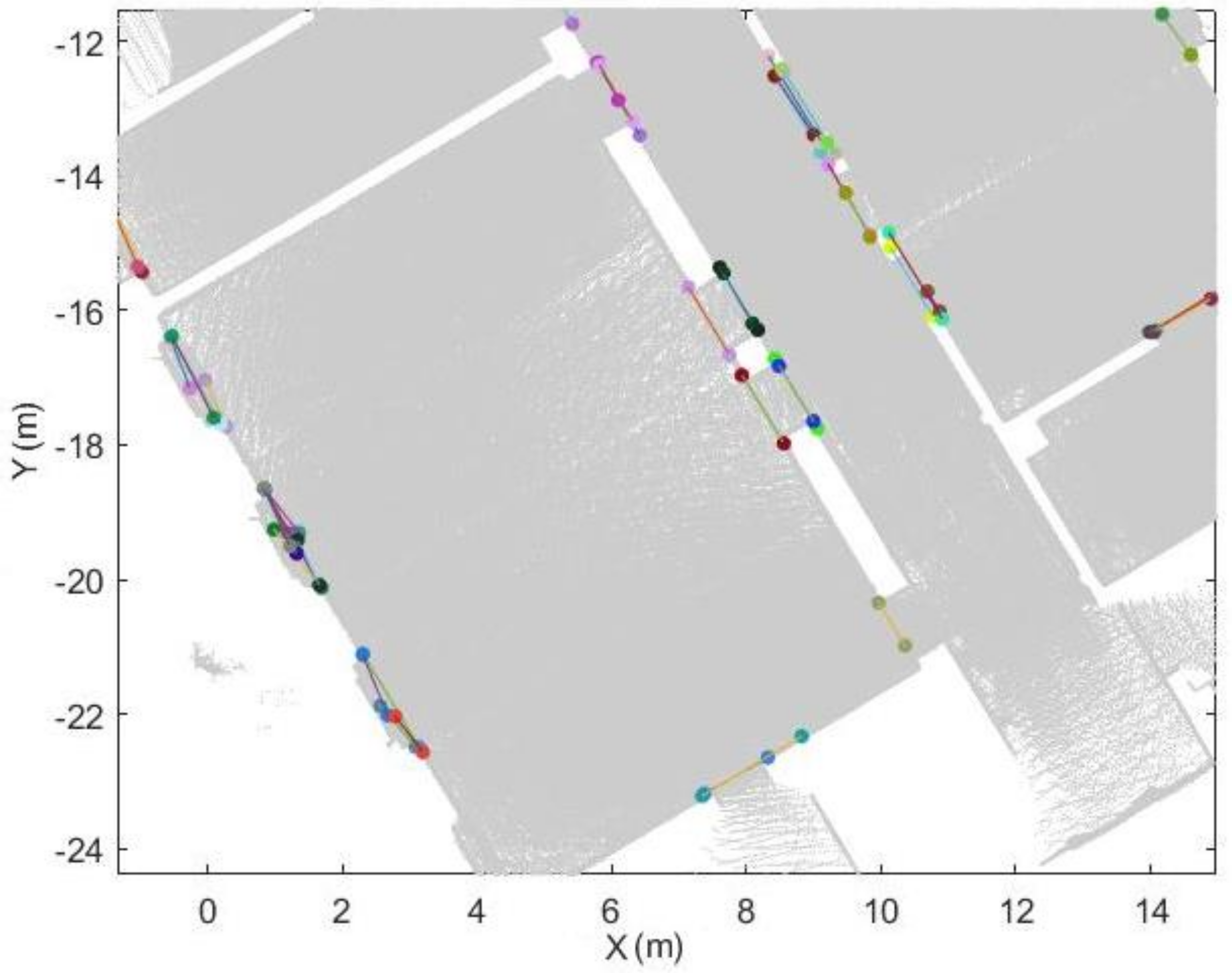
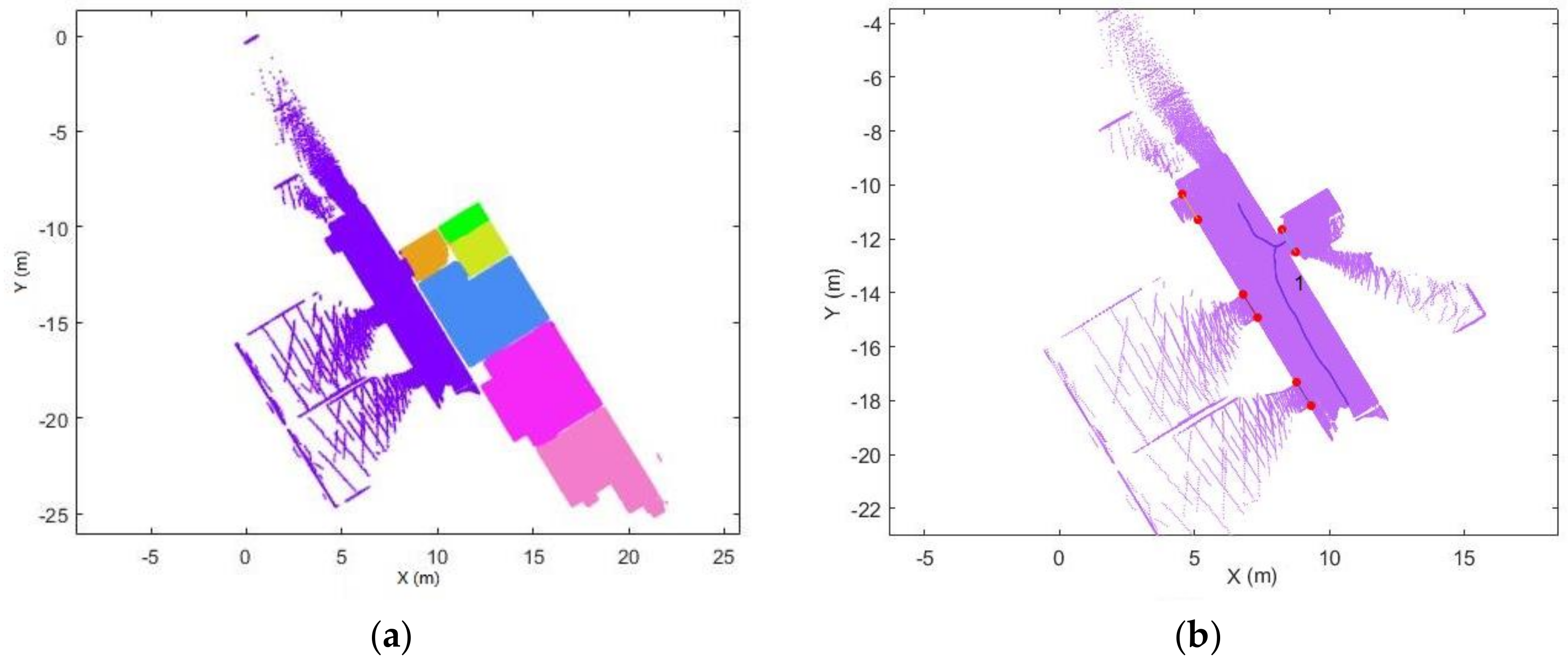
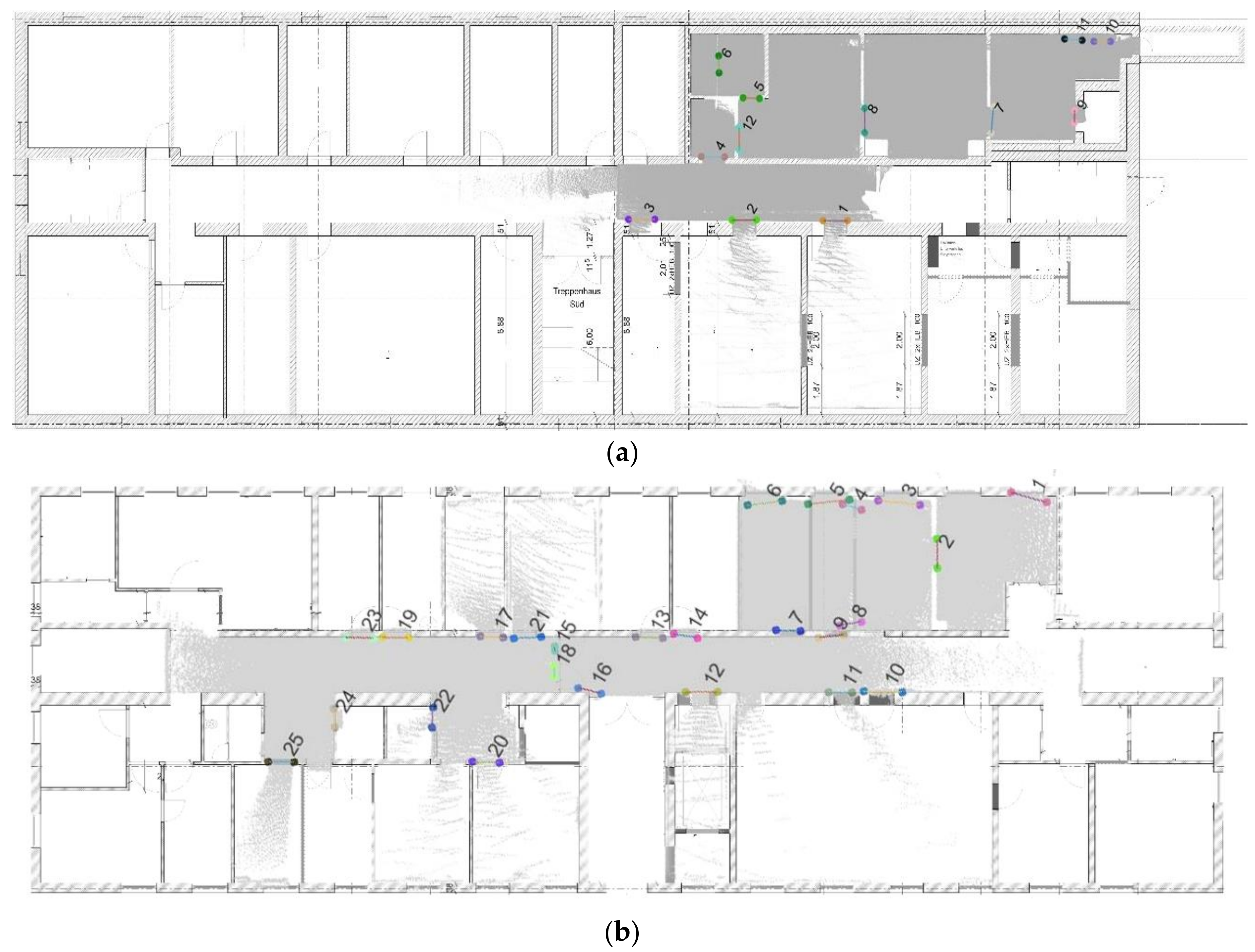
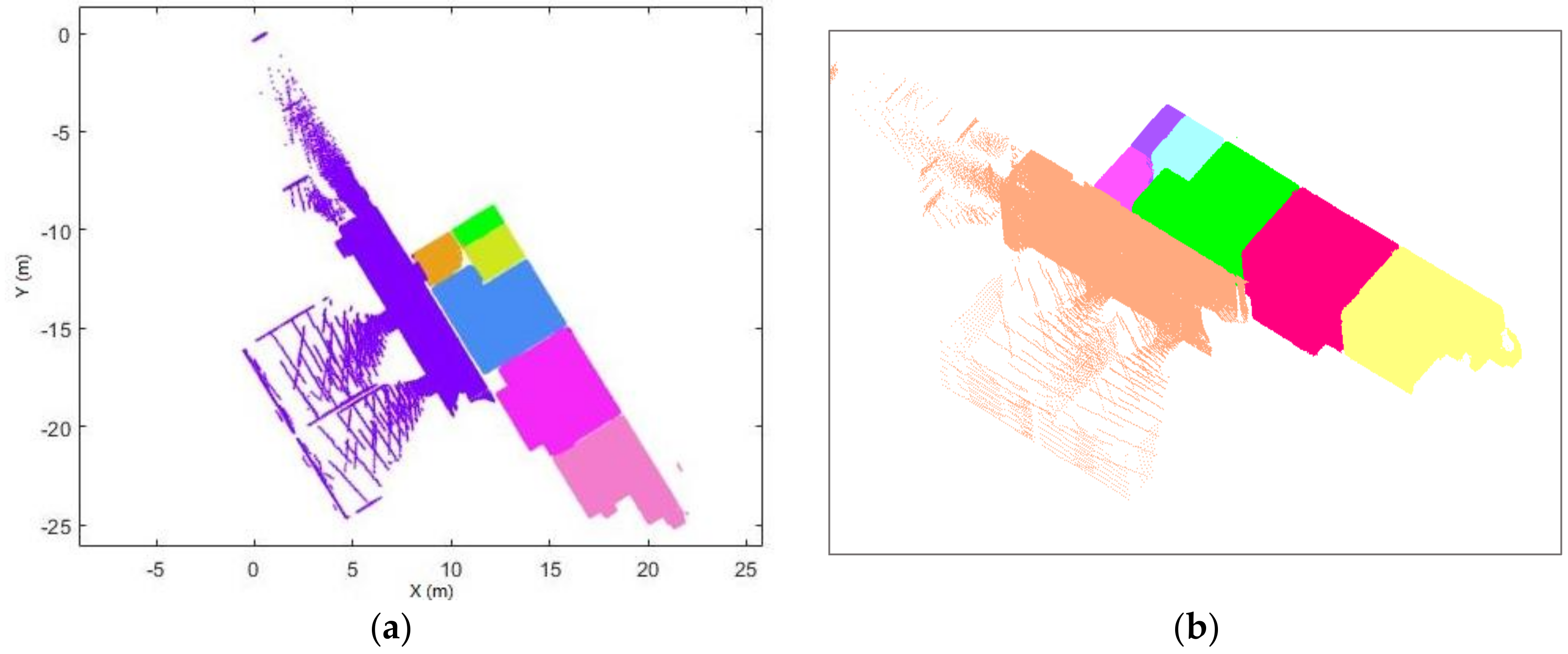
- Each point in the trajectory corresponds to a single scanline. The point clouds can be split into several subsets based on the space label in the trajectory, as shown in Figure 15a. This process is used to accelerate the subsequent process.
- For each point cloud subset (see Figure 15b), we construct the edge from each trajectory point to each corresponding point in the scanline. The basic assumption is that if the point belongs to the space, the edge which links the scanner position and the point will not intersect with the door segment in the xy-plane. Therefore, if the segments do not intersect with defined door segments, then the point belongs to this space.
5. Results and Discussion
5.1. Pre-Processing
5.2. Opening Detection
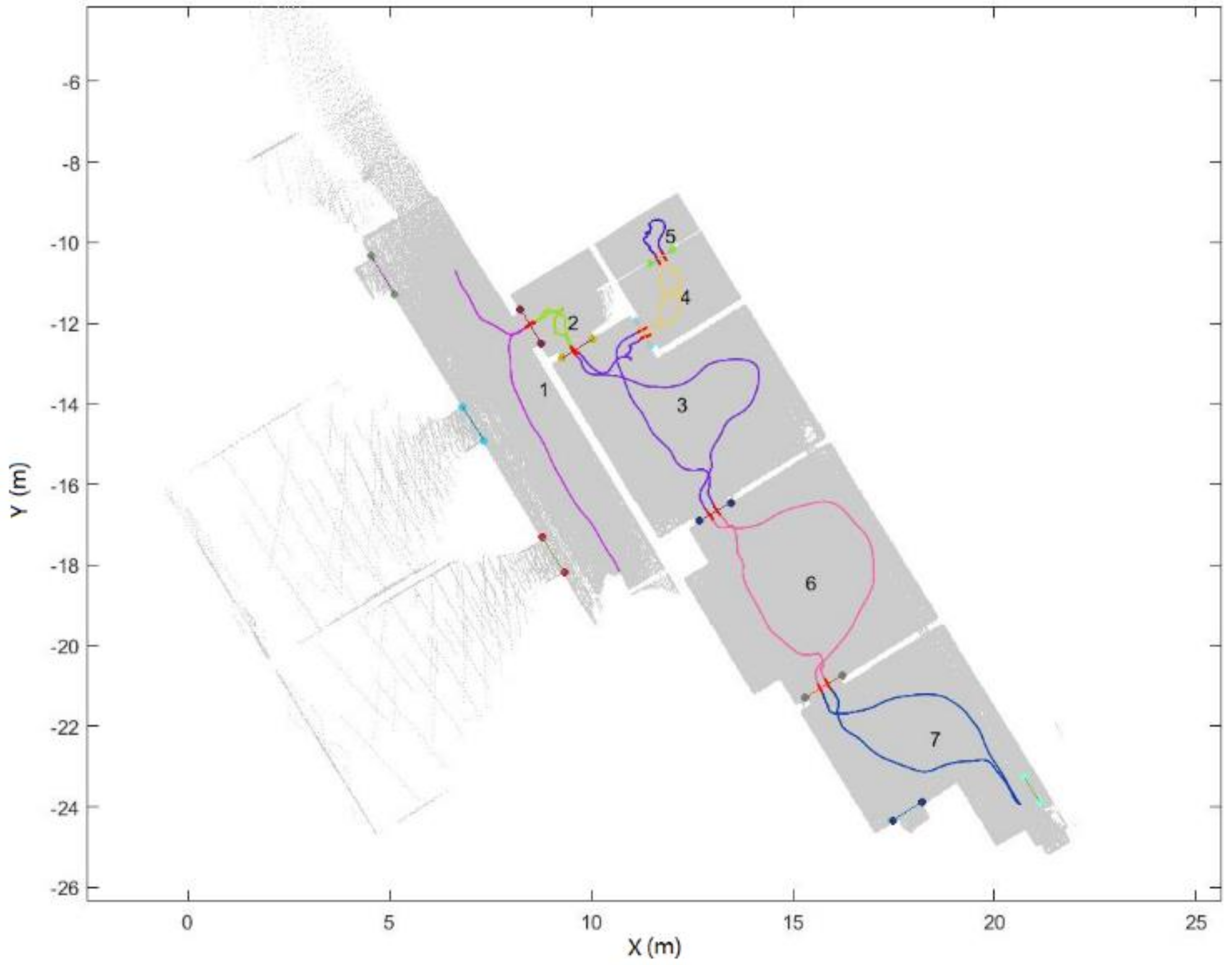
5.3. Trajectory Subdivision
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Klepeis, N.E.; Nelson, W.C.; Ott, W.R.; Robinson, J.P.; Tsang, A.M.; Switzer, P.; Behar, J.V.; Hern, S.C.; Engelmann, W.H. The National Human Activity Pattern Survey (NHAPS): A resource for assessing exposure to environmental pollutants. J. Expo. Anal. Environ. Epidemiol. 2001, 11, 231–252. [Google Scholar] [CrossRef] [PubMed]
- Zlatanova, S.; Liu, L.; Sithole, G.; Zhao, J.; Mortari, F. Space Subdivision for Indoor Applications; OTB Research Institute for the Built Environment, Delft University of Technology: Delft, The Netherlands, 2014; ISBN 9789077029374. [Google Scholar]
- Ochmann, S.; Vock, R.; Wessel, R.; Klein, R. Automatic reconstruction of parametric building models from indoor point clouds. Comput. Graph. 2016, 54, 94–103. [Google Scholar] [CrossRef]
- Díaz-Vilariño, L.; Verbree, E.; Zlatanova, S.; Diakité, A. Indoor modelling from SLAM-based laser scanner: Door detection to envelope reconstruction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 345–352. [Google Scholar] [CrossRef]
- Nikoohemat, S.; Peter, M.; Oude Elberink, S.; Vosselman, G. Exploiting Indoor Mobile Laser Scanner Trajectories for Semantic Interpretation of Point Clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 2/W4, 355–362. [Google Scholar] [CrossRef]
- Mura, C.; Mattausch, O.; Jaspe Villanueva, A.; Gobbetti, E.; Pajarola, R. Automatic room detection and reconstruction in cluttered indoor environments with complex room layouts. Comput. Graph. 2014, 44, 20–32. [Google Scholar] [CrossRef]
- Mozos, Ó.M. Semantic Labeling of Places with Mobile Robots; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 978-3-642-11209-6. [Google Scholar]
- Turner, E.; Zakhor, A. Floor Plan Generation and Room Labeling of Indoor Environments from Laser Range Data. In Proceedings of the 2014 International Conference on Computer Graphics Theory and Applications (GRAPP), Lisbon, Portugal, 5–8 January 2014; pp. 1–12. [Google Scholar]
- Mader, D.; Westfeld, P.; Maas, H.G. An integrated flexible self-calibration approach for 2D laser scanning range finders applied to the hokuyo UTM-30LX-ew. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 385–393. [Google Scholar] [CrossRef]
- Hu, X.; Ye, L. A Fast and Simple Method of Building Detection from Lidar Data Based on Scan Line Analysis. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 3/W1, 7–13. [Google Scholar] [CrossRef]
- Hebel, M.; Stilla, U. Pre-classification of points and segmentation of urban objects by scan line analysis of airborne LiDAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 105–110. [Google Scholar]
- Bao, S.Y.; Bagra, M.; Yu-Wei, C.; Savarese, S. Semantic structure from motion with points, regions, and objects. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 2703–2710. [Google Scholar]
- Rottmann, A.; Mozos, Ó.M.; Stachniss, C.; Burgard, W. Semantic place classification of indoor environments with mobile robots using boosting. In Proceedings of the Twentieth National Conference on Artificial Intelligence, and the Seventeenth Annual Conference on Innovative Applications of Artificial Intelligence, Pittsburgh, PA, USA, 9–13 July 2005; pp. 1306–1311. [Google Scholar]
- Borrmann, D. Multi-modal 3D Mapping. Ph.D. Thesis, Universität Würzburg, Würzburg, Germany, 2018. [Google Scholar]
- Díaz-Vilariño, L.; Khoshelham, K.; Martínez-Sánchez, J.; Arias, P. 3D Modeling of Building Indoor Spaces and Closed Doors from Imagery and Point Clouds. Sensors 2015, 15, 3491–3512. [Google Scholar] [CrossRef] [PubMed]
- Quintana, B.; Prieto, S.A.; Adán, A.; Bosché, F. Door detection in 3D colored laser scans for autonomous indoor navigation. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Alcala de Henares, Spain, 4–7 October 2016; pp. 4–7. [Google Scholar]
- Tuttas, S.; Stilla, U. Window detection in sparse point clouds using indoor points. Inf. Sci. (N. Y.) 2009, 38, 131–136. [Google Scholar] [CrossRef]
- Zhang, R.; Zakhor, A. Automatic identification of window regions on indoor point clouds using LiDAR and cameras. In Proceedings of the 2014 IEEE Winter Conference on Applications of Computer Vision (WACV), Steamboat Springs, CO, USA, 24–26 March 2014; pp. 107–114. [Google Scholar]
- Michailidis, G.-T.; Pajarola, R. Bayesian graph-cut optimization for wall surfaces reconstruction in indoor environments. Vis. Comput. 2016, 1–9. [Google Scholar] [CrossRef]
- Adan, A.; Huber, D. 3D reconstruction of interior wall surfaces under occlusion and clutter. In Proceedings of the 2011 International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), Hangzhou, China, 16–19 May 2011; pp. 275–281. [Google Scholar]
- Mura, C.; Mattausch, O.; Villanueva, A.J.; Gobbetti, E.; Pajarola, R. Robust reconstruction of interior building structures with multiple rooms under clutter and occlusions. In Proceedings of the 13th International Conference on Computer-Aided Design and Computer Graphics (CAD/Graphics 2013), Guangzhou, China, 16–18 November 2013; pp. 52–59. [Google Scholar]
- Armeni, I.; Sener, O.; Zamir, A.R.; Jiang, H.; Brilakis, I.; Fischer, M.; Savarese, S. 3D Semantic Parsing of Large-Scale Indoor Spaces. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1534–1543. [Google Scholar]
- Turner, E.; Cheng, P.; Zakhor, A. Fast, automated, scalable generation of textured 3D models of indoor environments. IEEE J. Sel. Top. Signal Process. 2015, 9, 409–421. [Google Scholar] [CrossRef]
- Xu, M.; Wei, S.; Zlatanova, S. An Indoor Navigation Approach Considering Obstacles and Space Subdivision of 2D Plan. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, B4, 339–346. [Google Scholar] [CrossRef]
- Khoshelham, K.; Vilariño, L.D.; Peter, M.; Kang, Z.; Acharya, D. The ISPRS benchmark on indoor modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 367–372. [Google Scholar] [CrossRef]
- Maboudi, M.; Bánhidi, D.; Gerke, M. Evaluation of indoor mobile mapping systems. In Proceedings of the GFaI Workshop 3D North East 2017 (20th Application-oriented Workshop on Measuring, Modeling, Processing and Analysis of 3D-Data), Berlin, Germany, 7–8 December 2017; pp. 125–134. [Google Scholar]
- Dewez, T.J.B.; Plat, E.; Degas, M.; Richard, T.; Pannet, P.; Al, E. Handheld Mobile Laser Scanners Zeb-1 and Zeb-Revo to map an underground quarry and its above-ground surroundings. In Proceedings of the 2nd Virtual Geosciences Conference (VGC 2016), Bergen, Norway, 21–23 September 2016; pp. 1–4. [Google Scholar]
- Vosselman, G.; Coenen, M.; Rottensteiner, F. Contextual segment-based classification of airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 2017, 128, 354–371. [Google Scholar] [CrossRef]
- Peter, M.; Jafri, S.R.U.N.; Vosselman, G. Line Segmentation of 2D Laser Scanner Point Clouds for Indoor Slam Based on A Range of Residuals. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 2/W4, 363–369. [Google Scholar] [CrossRef]
- Khoshelham, K.; Díaz-Vilariño, L. 3D Modelling of Interior Spaces: Learning The Language of Indoor Architecture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL–5. [Google Scholar] [CrossRef]
- Lin, C.H.; Chen, J.Y.; Su, P.L.; Chen, C.H. Eigen-feature analysis of weighted covariance matrices for LiDAR point cloud classification. ISPRS J. Photogramm. Remote Sens. 2014, 94, 70–79. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Points | Scan Lines | Duration(s) |
|---|---|---|---|
| Dataset 1, Point Cloud | 477,5931 | 15,036 | 147.167 |
| Dataset 1, Trajectory | 14,717 | / | 147.158 |
| Dataset 2, Point Cloud | 2,999,507 | 9309 | 91.719 |
| Dataset 2, Trajectory | 9172 | / | 91.709 |
| Point Per Scan Line | Field of View | Scan Rate | Angle Resolution |
|---|---|---|---|
| 432(0.625° interval) | 270° × 360° | 100 lines/s 43,200 points/s | 0.25° |
| Dataset 1 | Dataset 2 | |||||
|---|---|---|---|---|---|---|
| λ1 | λ2 | λ3 | λ1 | λ2 | λ3 | |
| Mean | 1.31 × 10−5 | 0.78 | 2.02 | 3.05 × 10−5 | 2.17 | 4.92 |
| Variance | 9.73 × 10−10 | 3.29 | 3.29 | 2.56 × 10−9 | 1.75 | 10.32 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Peter, M.; Zhong, R.; Oude Elberink, S.; Zhou, Q. Space Subdivision in Indoor Mobile Laser Scanning Point Clouds Based on Scanline Analysis. Sensors 2018, 18, 1838. https://doi.org/10.3390/s18061838
Zheng Y, Peter M, Zhong R, Oude Elberink S, Zhou Q. Space Subdivision in Indoor Mobile Laser Scanning Point Clouds Based on Scanline Analysis. Sensors. 2018; 18(6):1838. https://doi.org/10.3390/s18061838
Chicago/Turabian StyleZheng, Yi, Michael Peter, Ruofei Zhong, Sander Oude Elberink, and Quan Zhou. 2018. "Space Subdivision in Indoor Mobile Laser Scanning Point Clouds Based on Scanline Analysis" Sensors 18, no. 6: 1838. https://doi.org/10.3390/s18061838
APA StyleZheng, Y., Peter, M., Zhong, R., Oude Elberink, S., & Zhou, Q. (2018). Space Subdivision in Indoor Mobile Laser Scanning Point Clouds Based on Scanline Analysis. Sensors, 18(6), 1838. https://doi.org/10.3390/s18061838