Modular AUV System with Integrated Real-Time Water Quality Analysis

 ,
,
Abstract
:1. Introduction
2. Material and Methods
2.1. Hardware
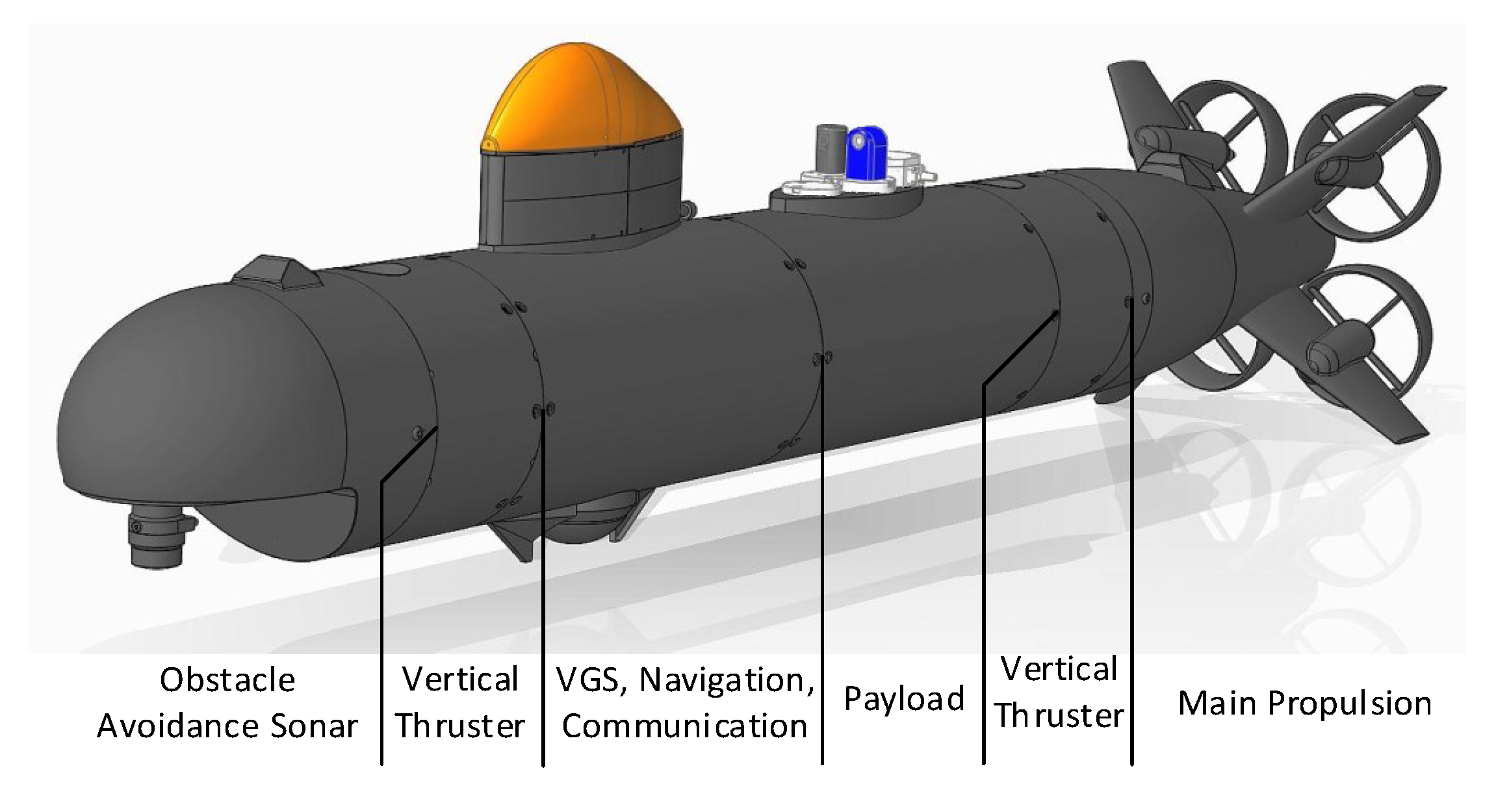
2.1.1. AUV Platform
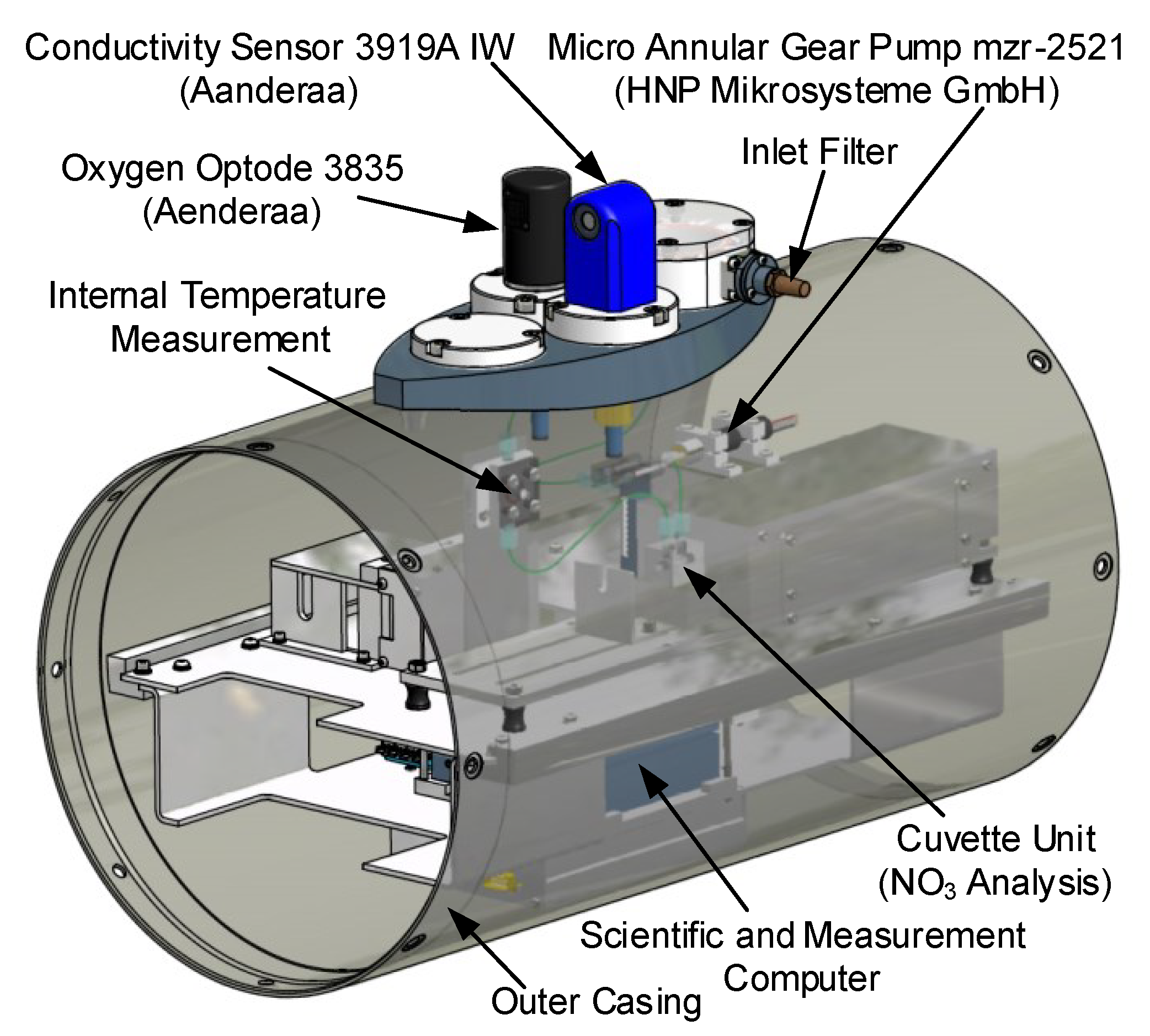
2.1.2. Sensor System
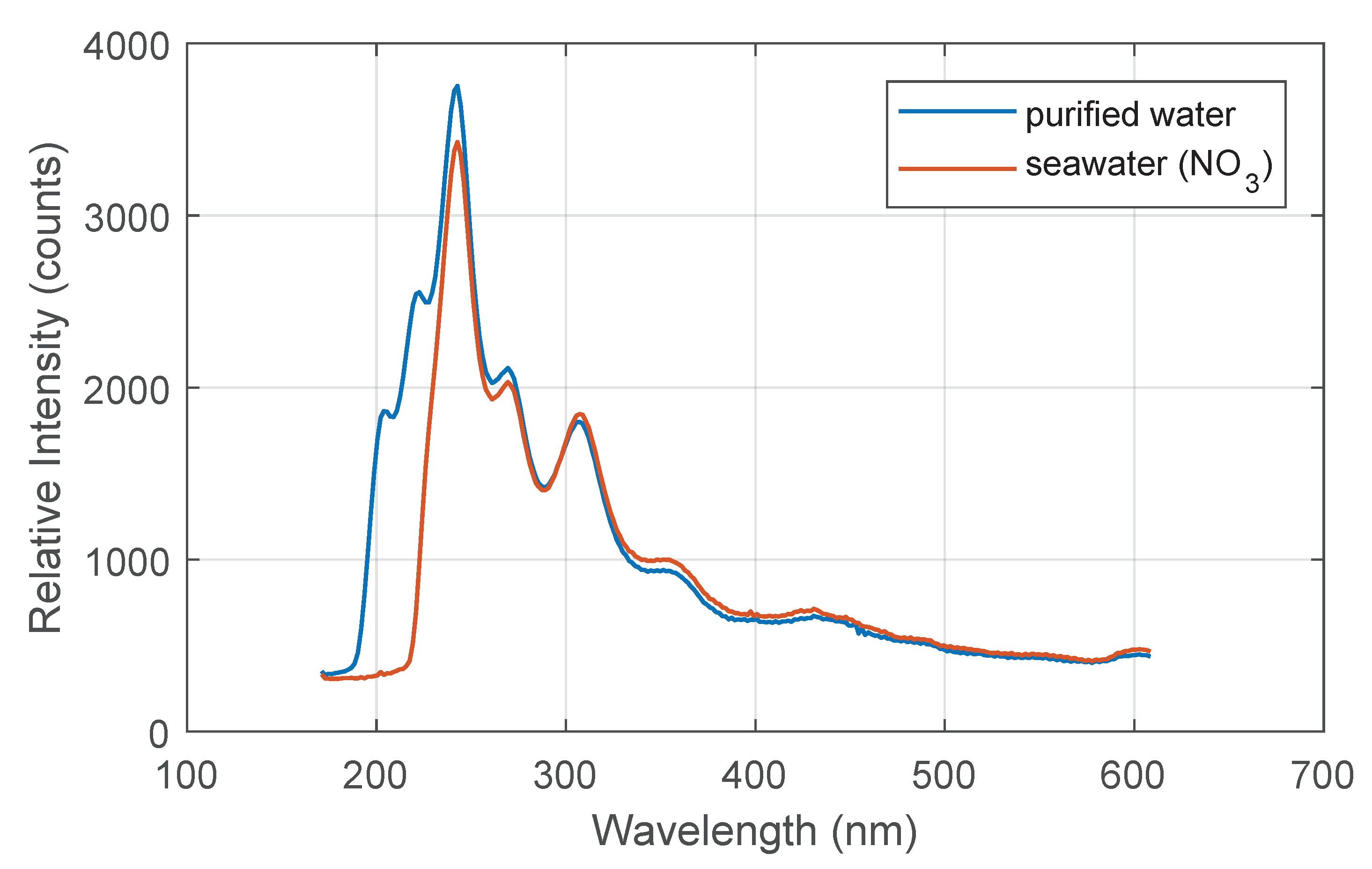
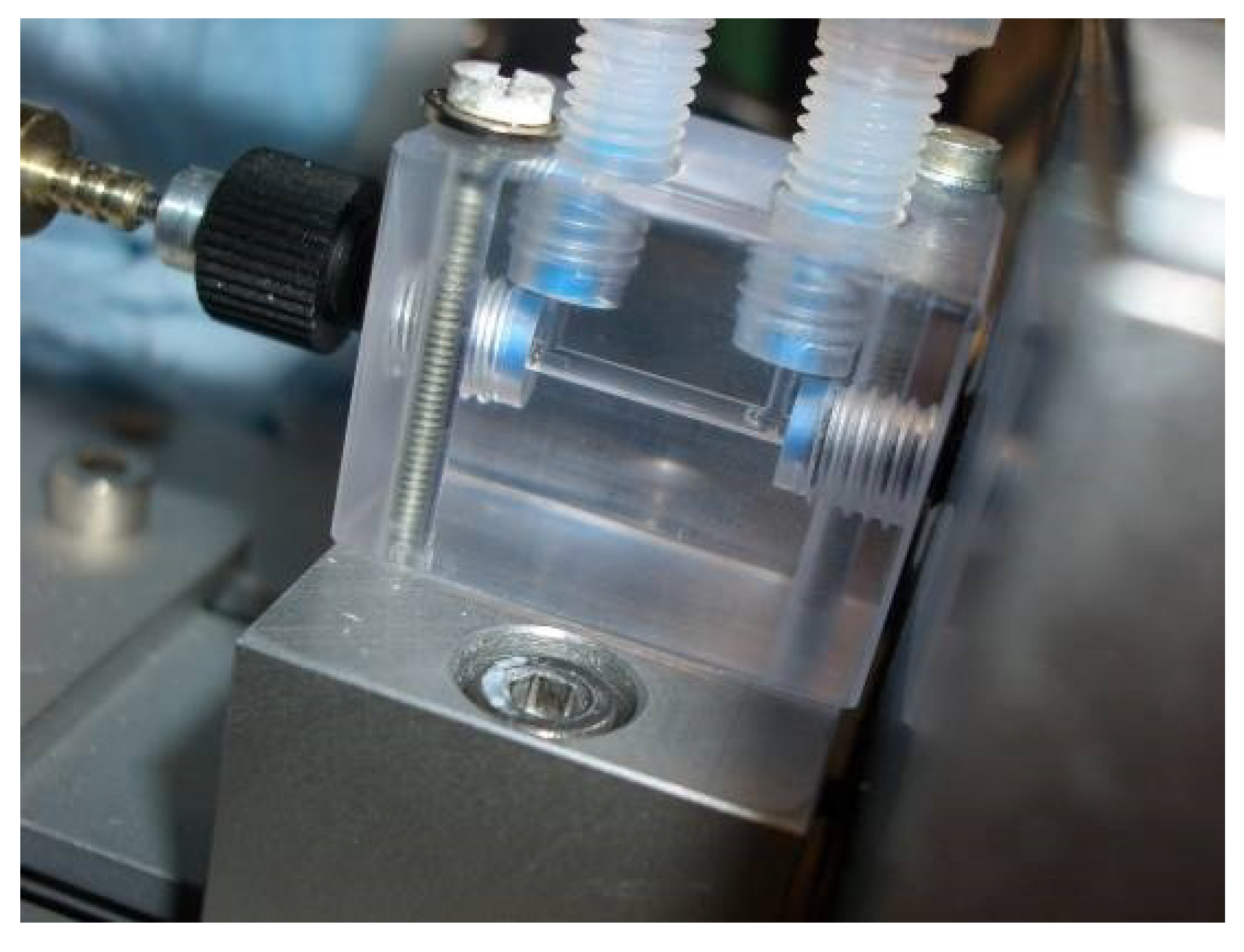
2.1.3. Nitrate Measurement
2.2. Software
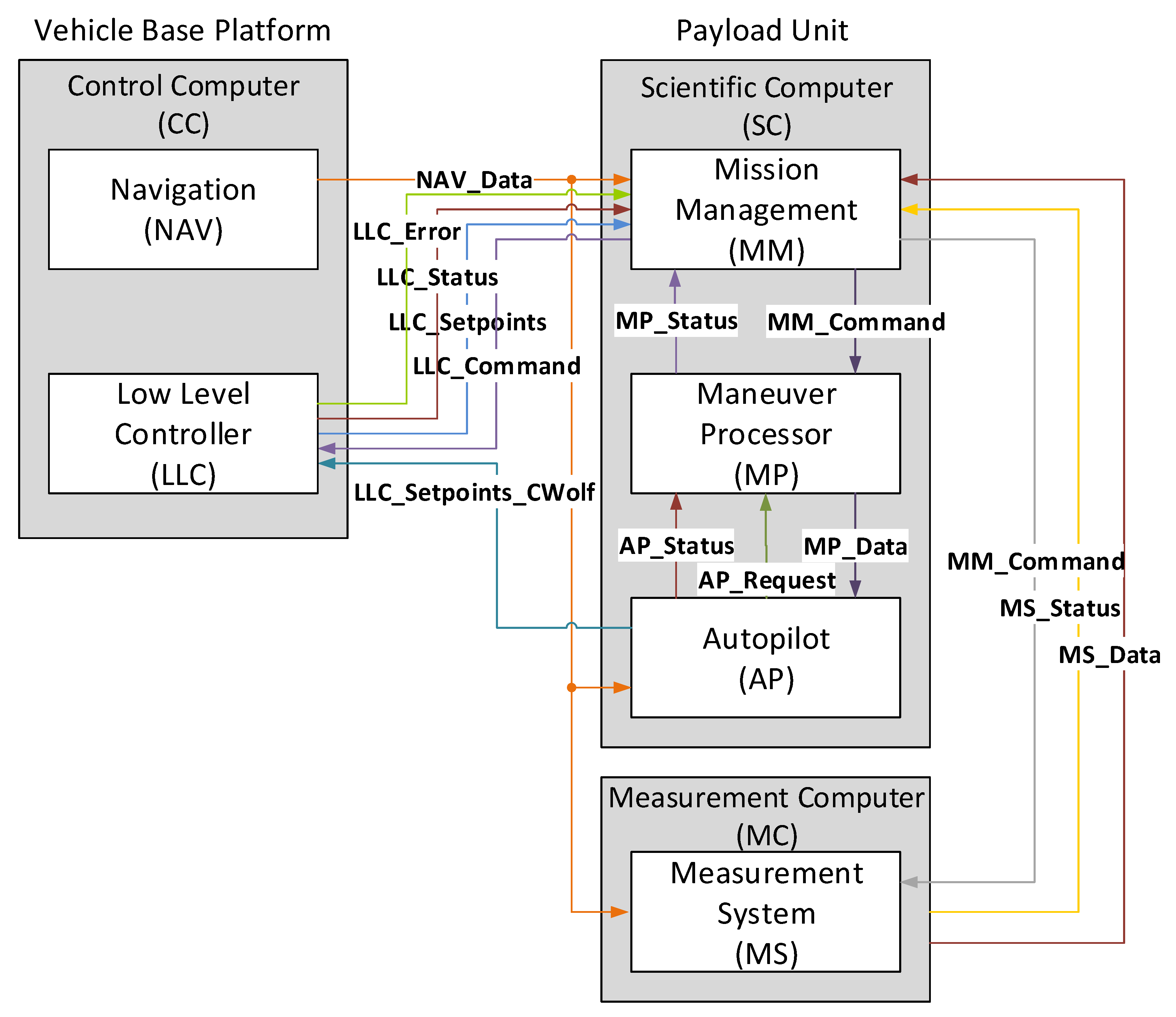
2.2.1. Communication Concept
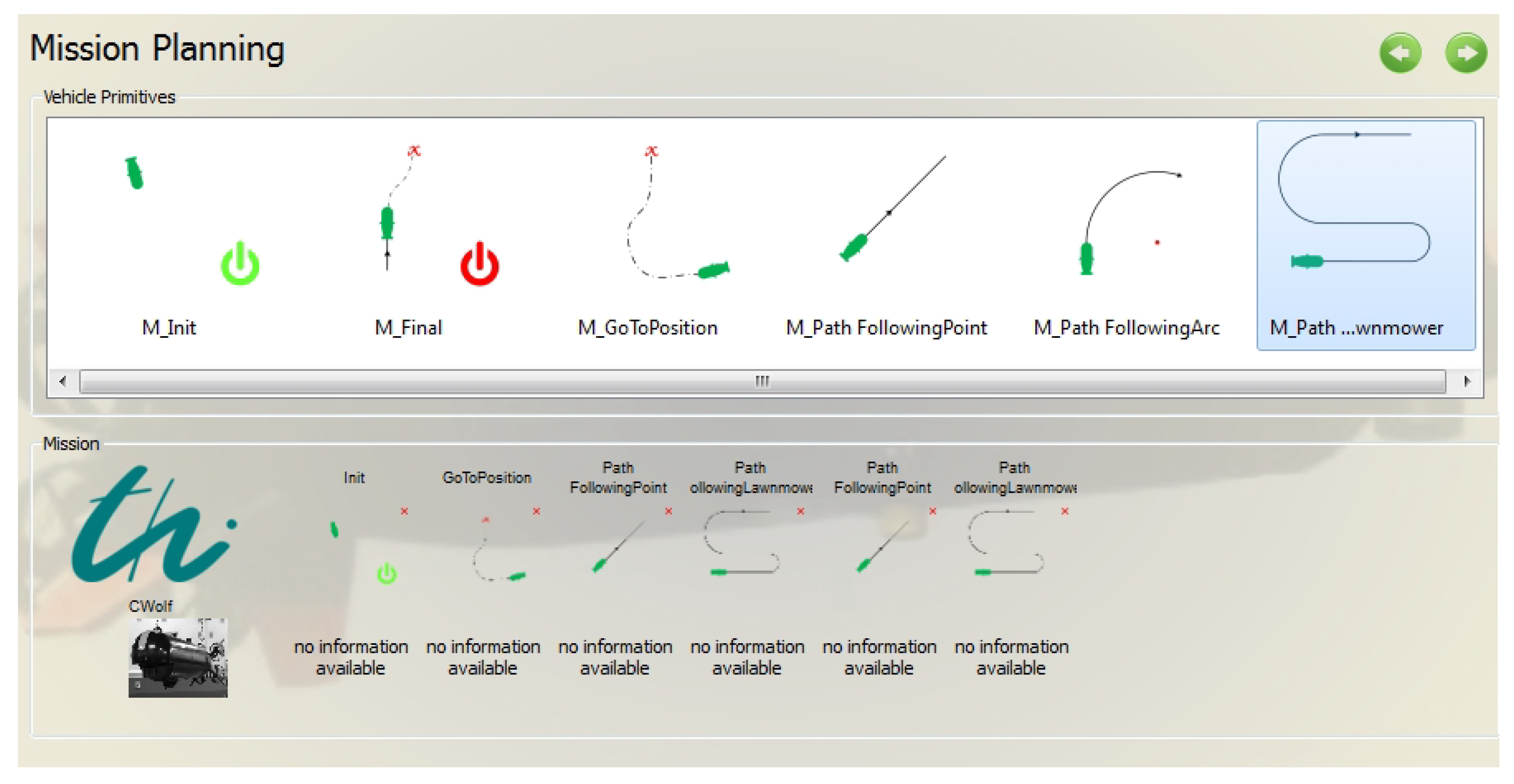
2.2.2. Mission Planning
- (1)
- Defining the sea chart/area of interest,
- (2)
- Selection of the vehicle, and
- (3)
- Build a plan using defined mission elements.
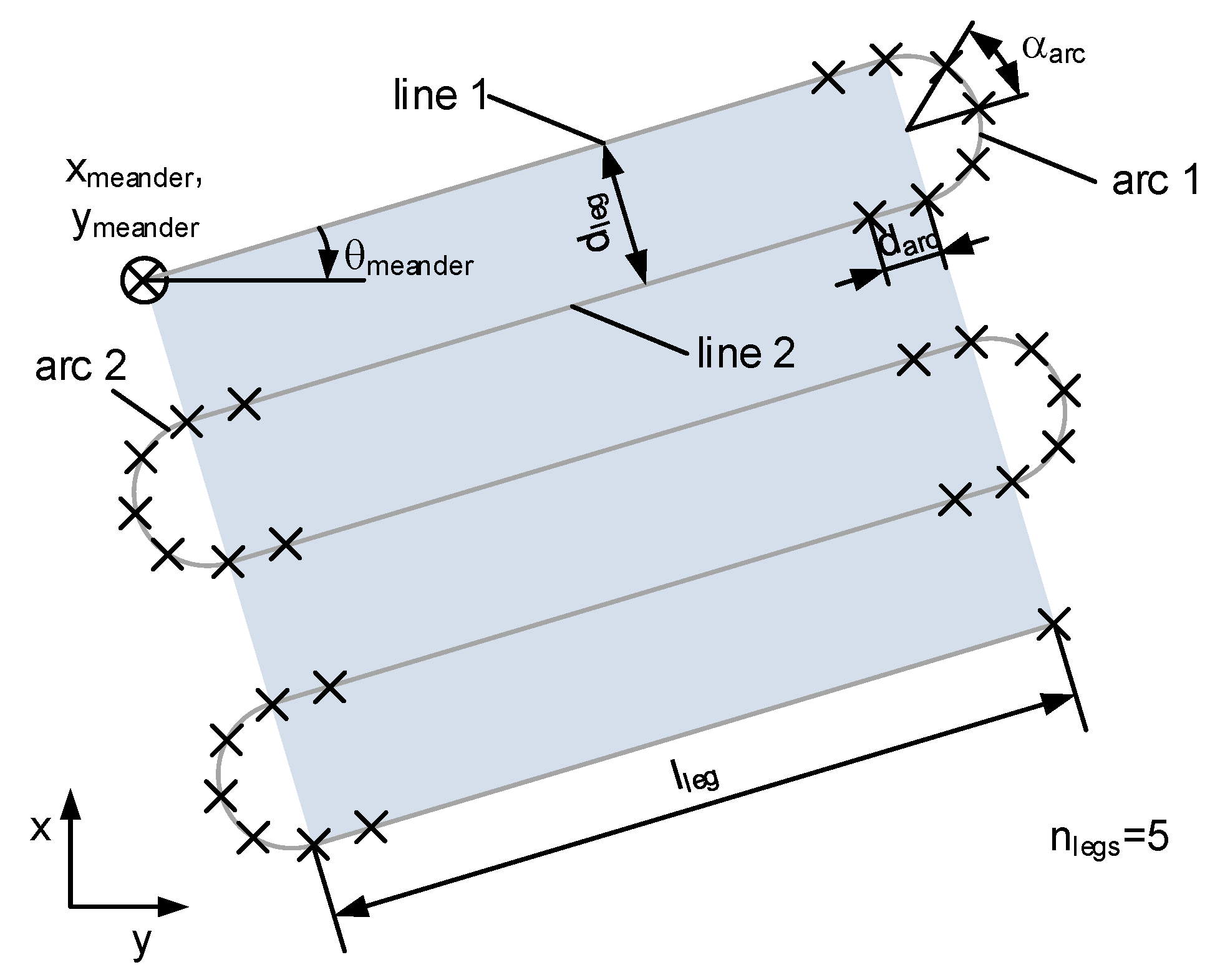
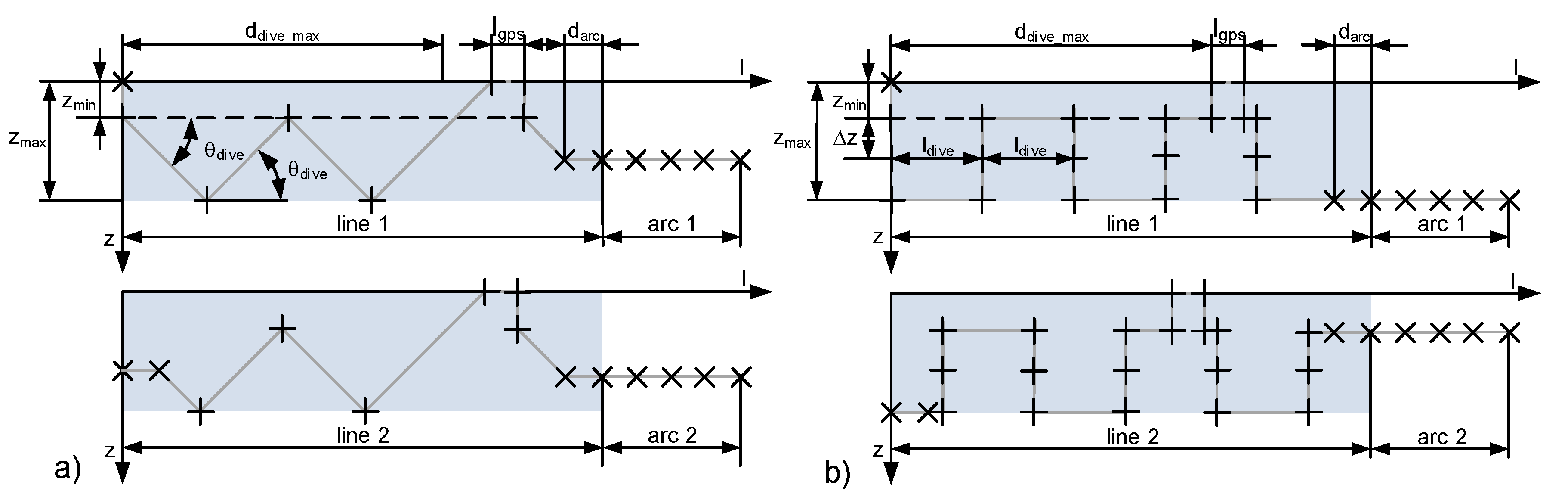
2.2.3. Dive Profiles
3. Results
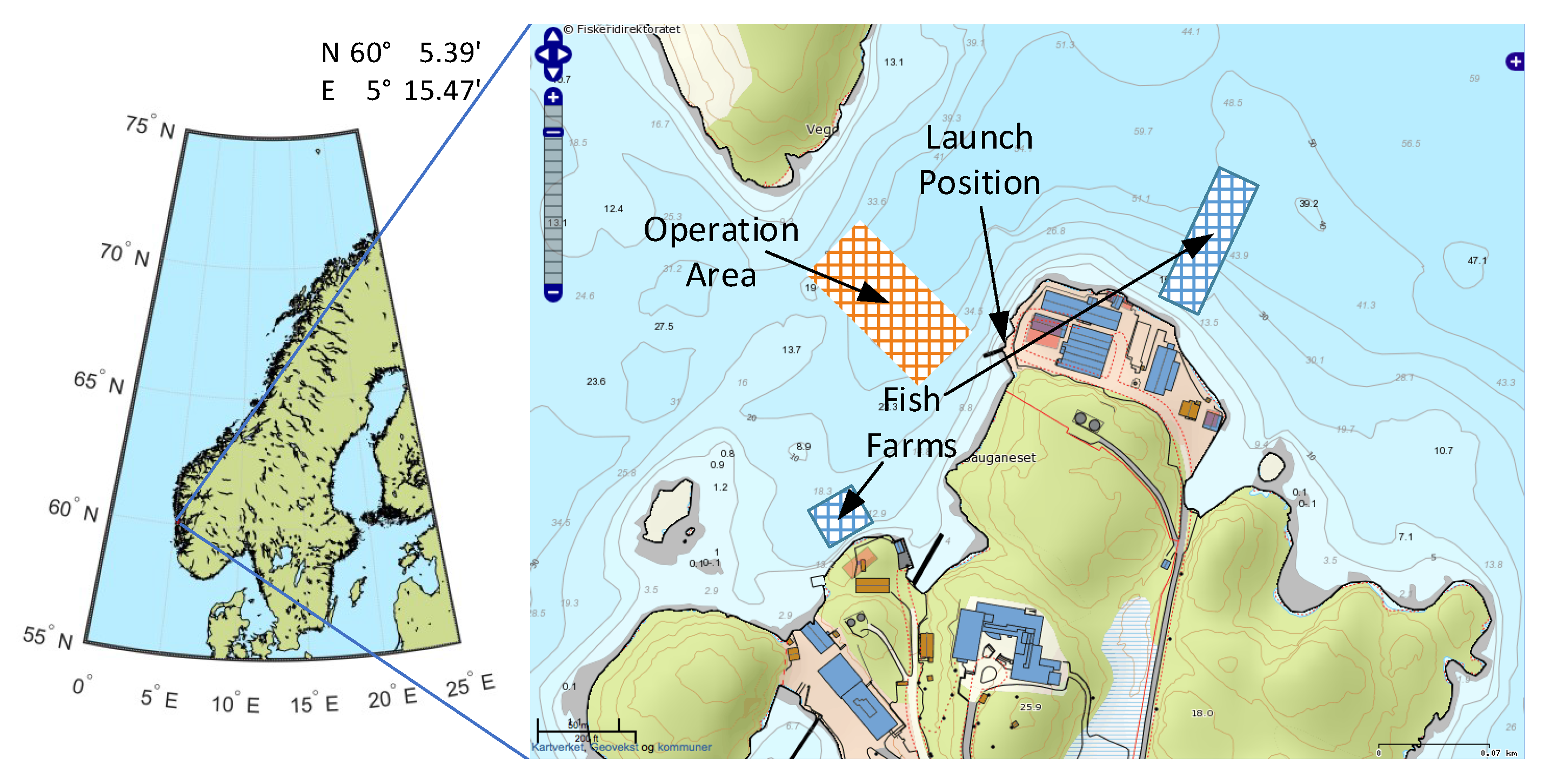
3.1. Test Description
- (i)
- to test the autonomous guidance of the vehicle and the sensor system in practice, and
- (ii)
- to monitor the water quality around the fish farms.
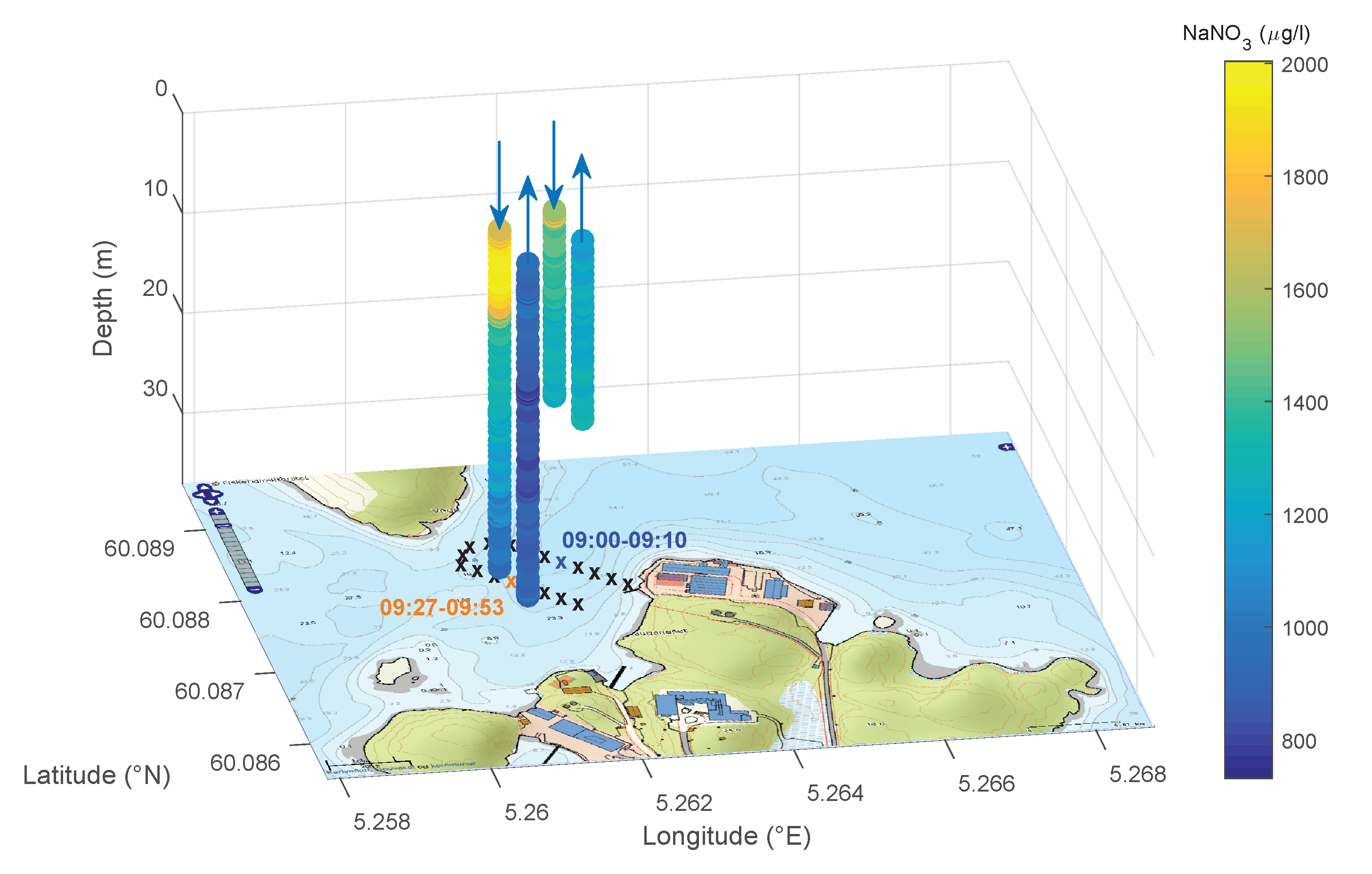
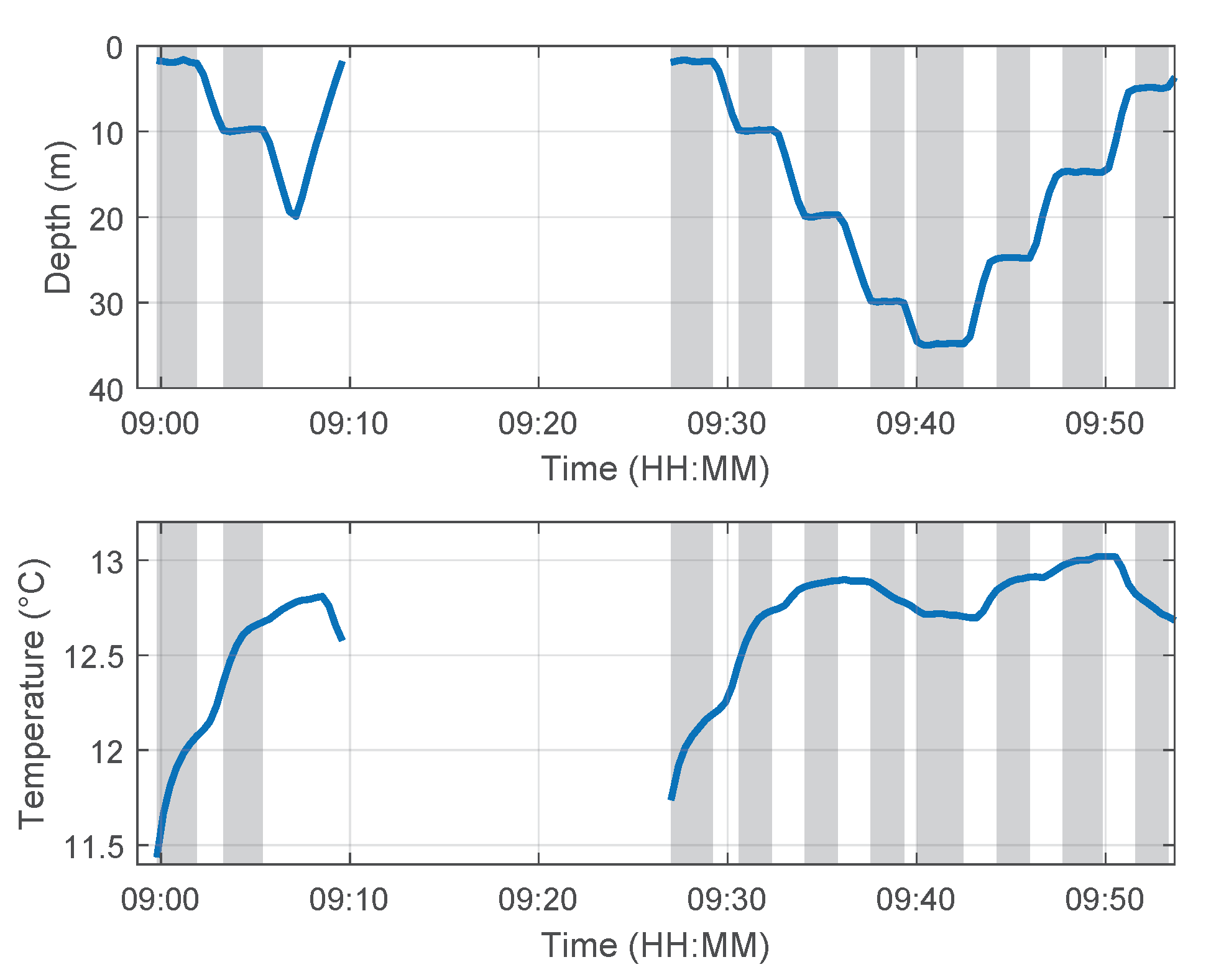
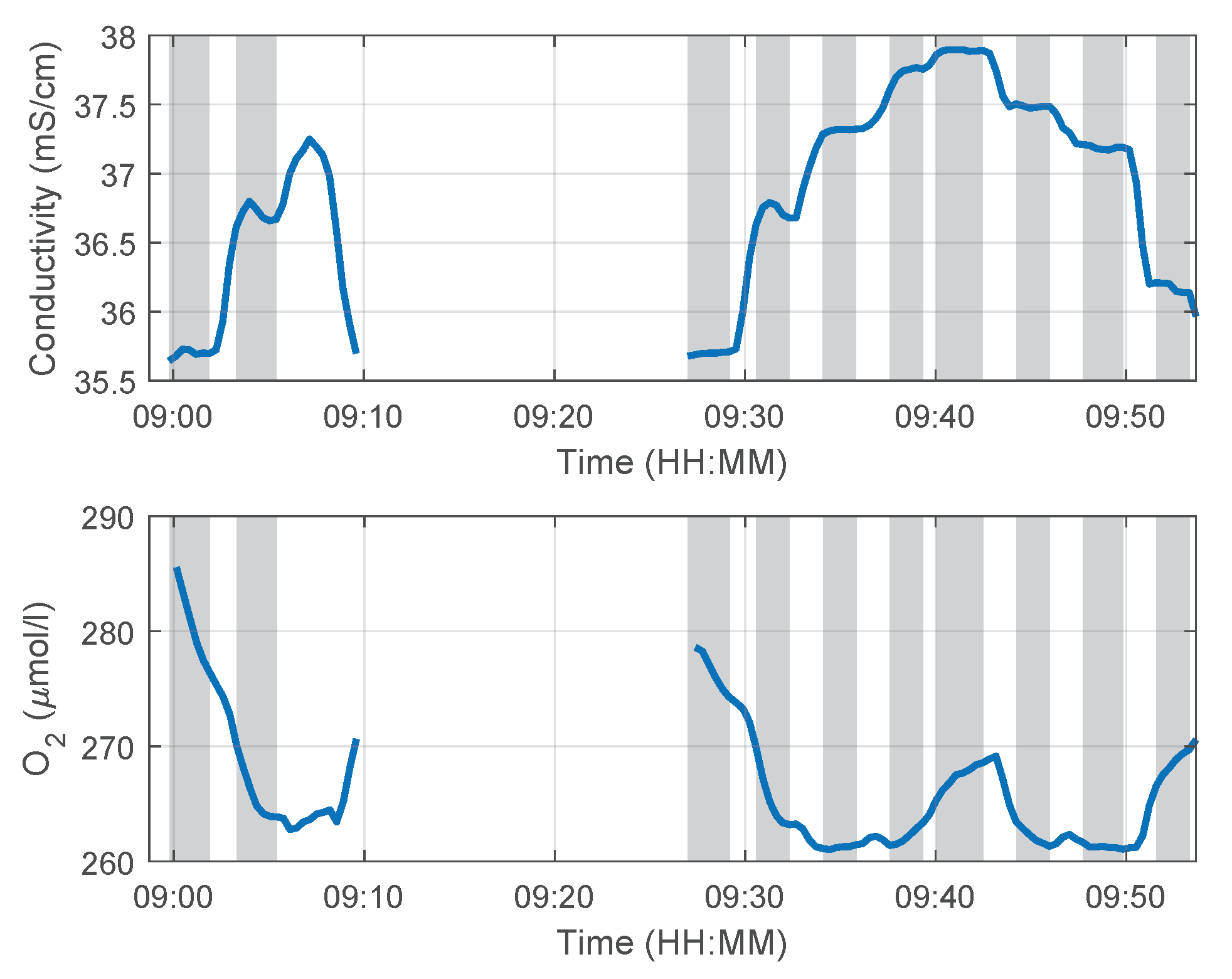
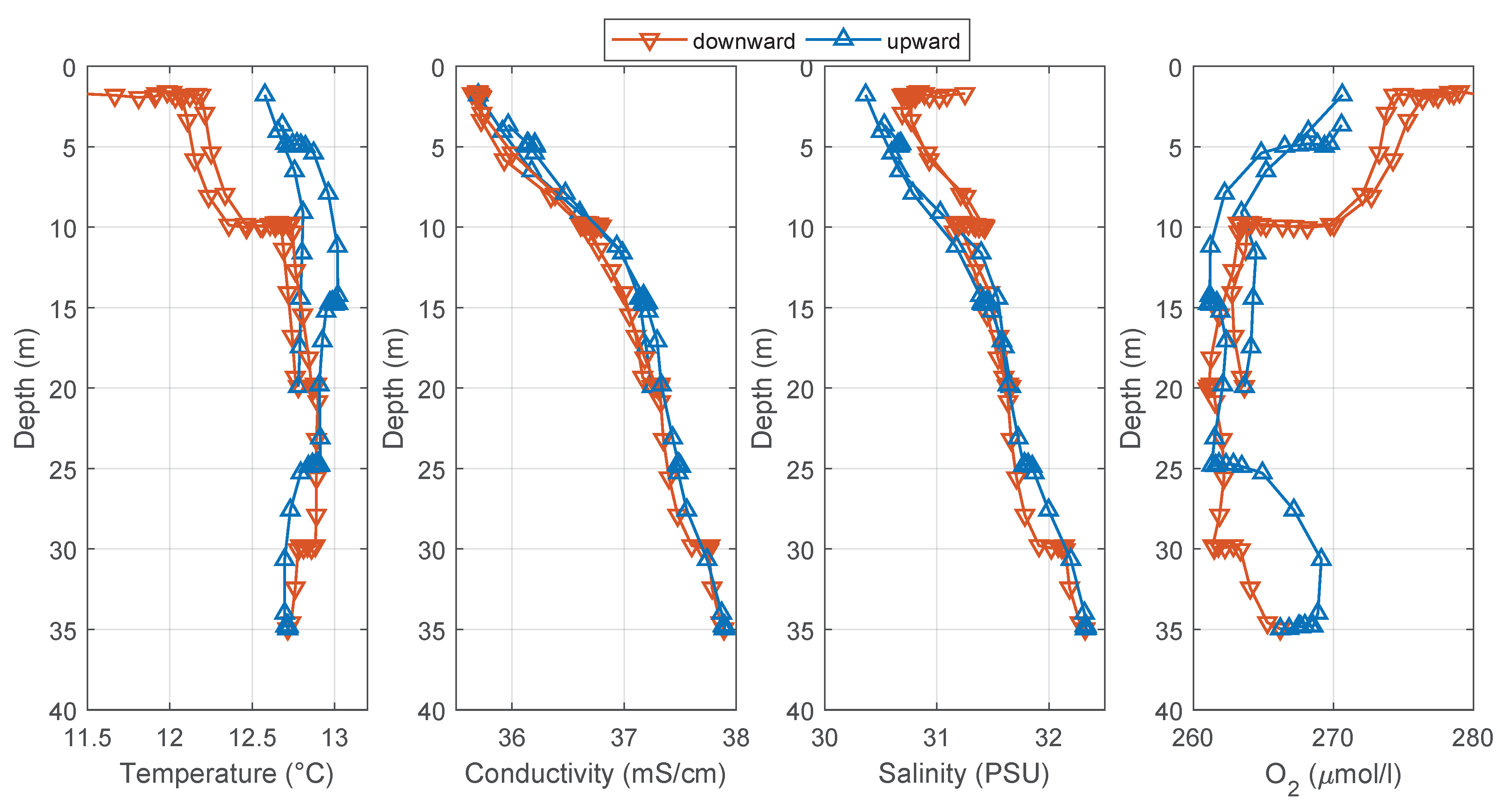
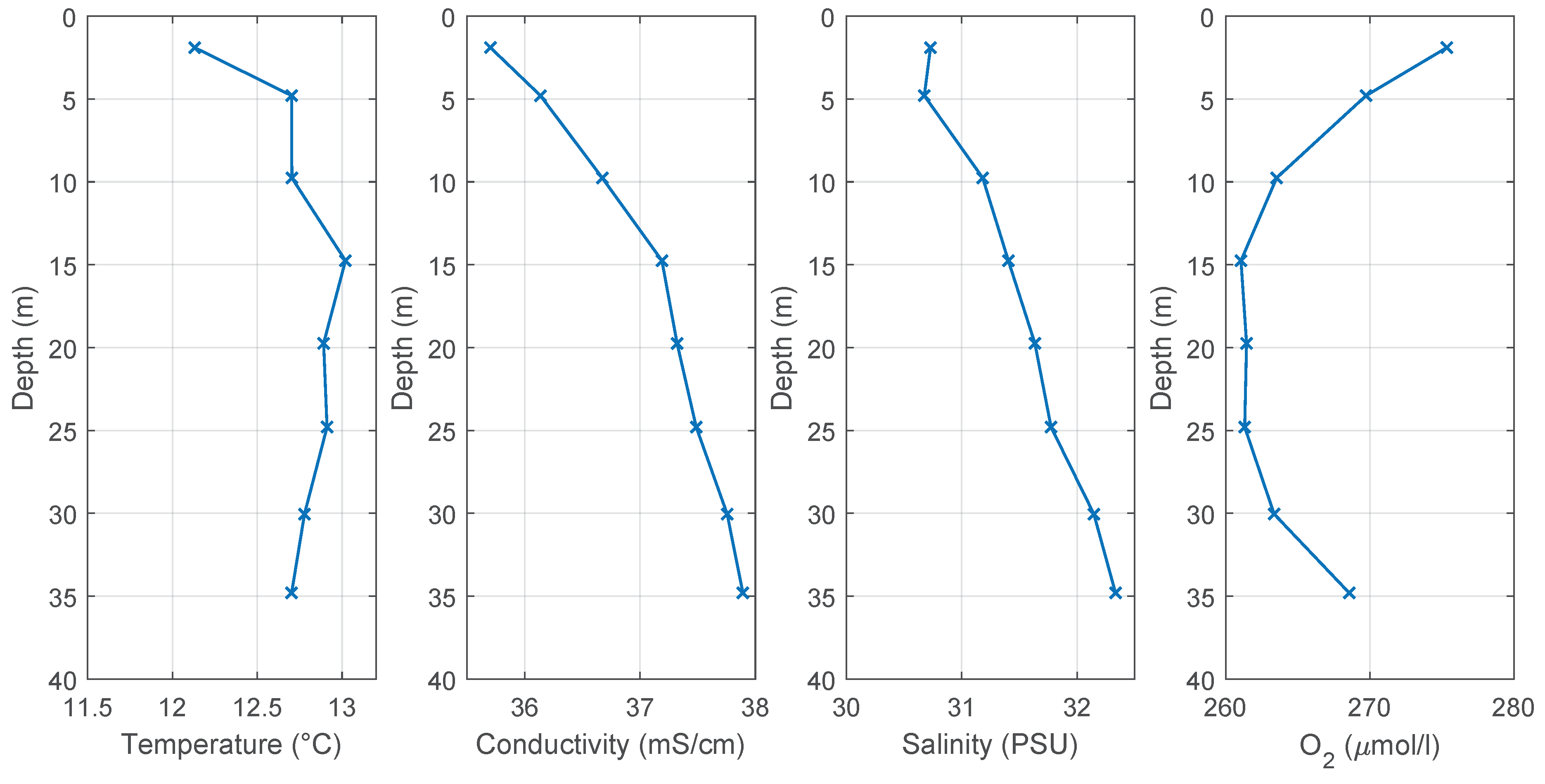
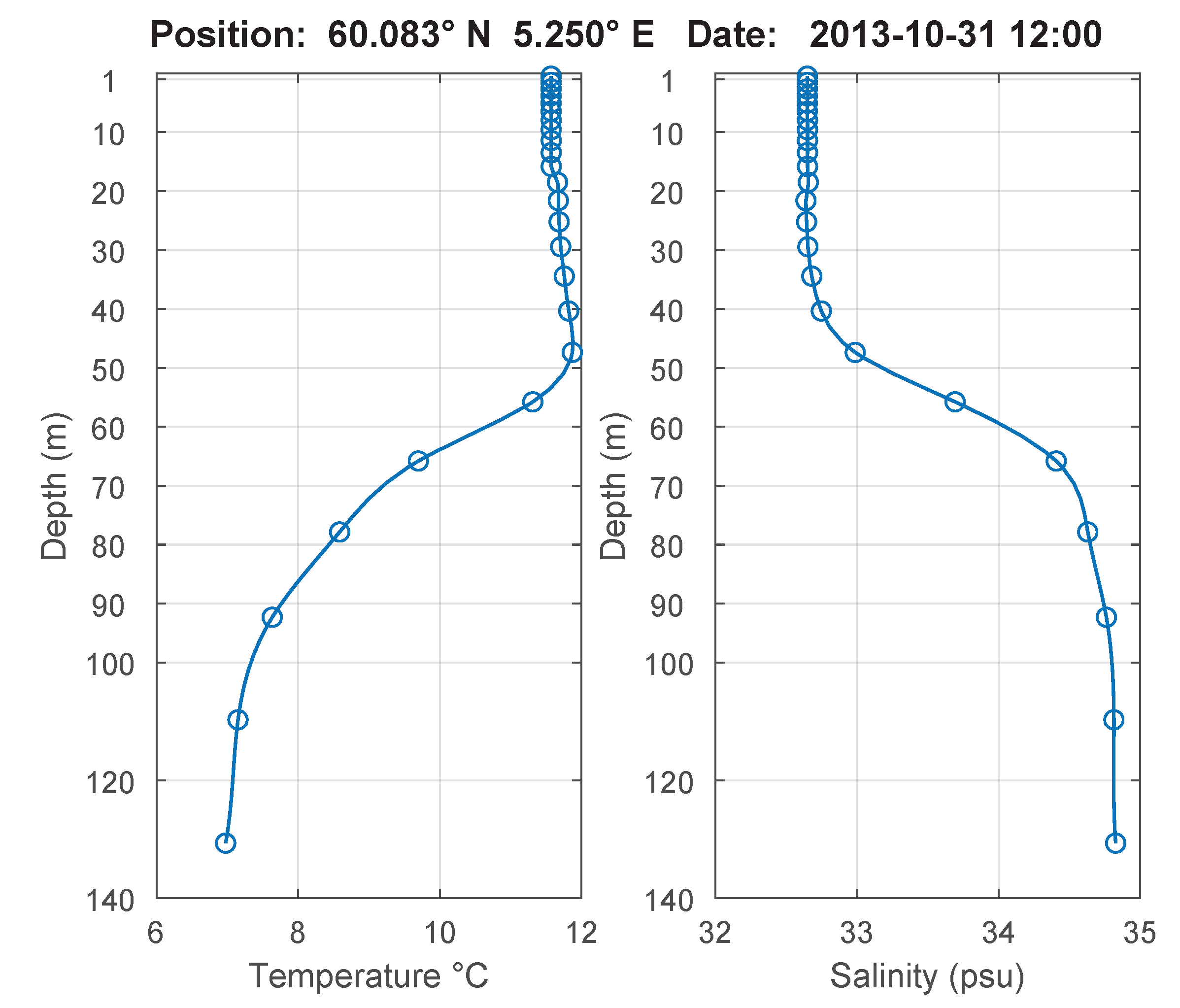
3.2. Analysis of the Logged Data
4. Discussion
4.1. Gained Experience and Possible Improvements
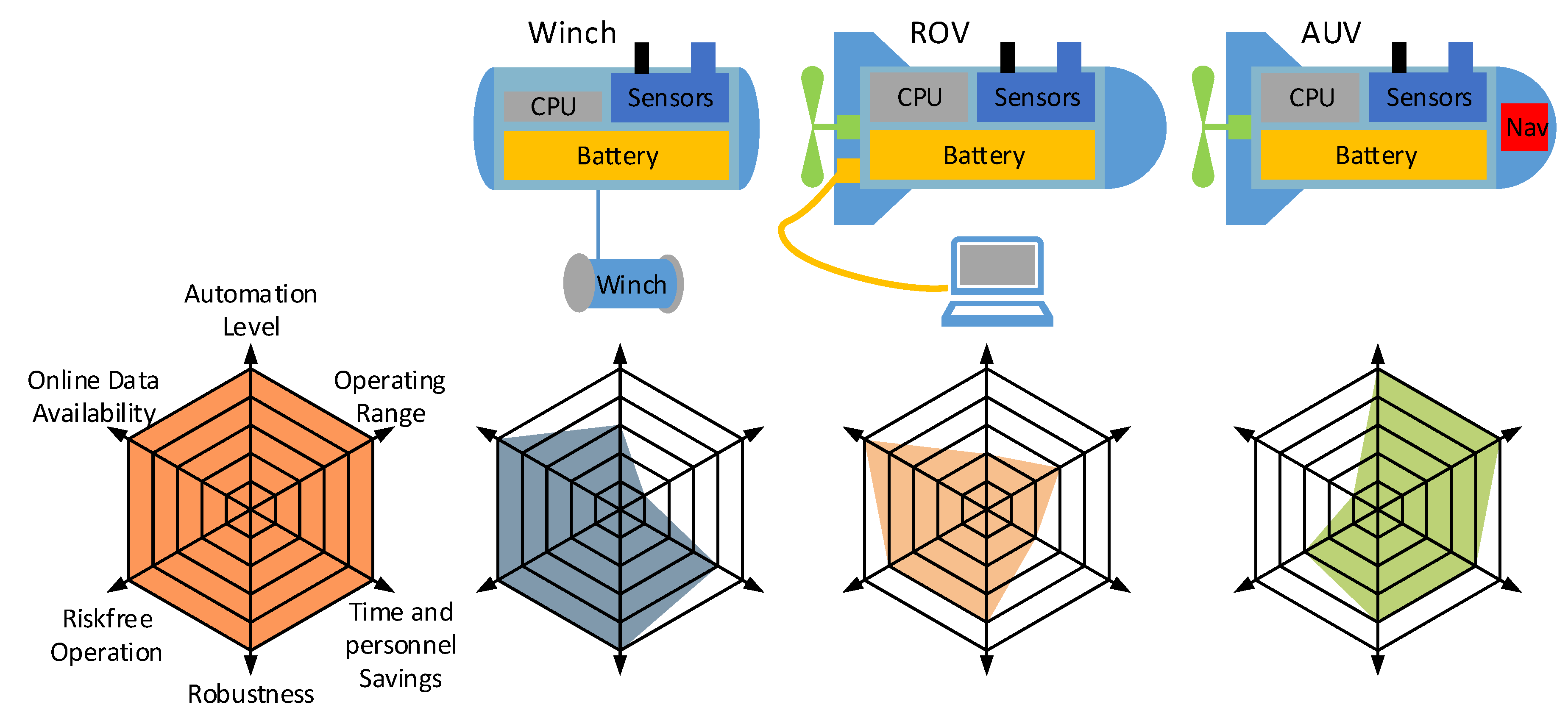
4.2. Modular Sensor System
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 4HJE | -4H- JENA engineering GmbH |
| AUV | Autonomous Underwater Vehicle |
| CC | Control Computer |
| CMEMS | Marine Environment Monitoring Service |
| DVL | Doppler Velocity Log |
| GES | Good Environmental Status |
| INS | Inertial Navigation System |
| LLC | Low Level Controller |
| MC | Measurement Computer |
| ROV | Remotely Operated Vehicle |
| SALMON | Sea Water Quality Monitoring and Management |
| SC | Scientific Computer |
| UDP | User Data Protocol |
| USBL | Ultra-Short BaseLine |
References
- World Bank. Fish to 2030—Prospects for Fisheries and Aquaculture. 2013. Available online: http://www.fao.org/docrep/019/i3640e/i3640e.pdf (accessed on 4 June 2018).
- Kobayashi, M.; Msangi, S.; Batka, M.; Vannuccini, S.; Dey, M.M.; Anderson, J.L. Fish to 2030: The Role and Opportunity for Aquaculture. Aquac. Econ. Manag. 2015, 19, 282–300. [Google Scholar] [CrossRef]
- European Union. COMMISSION DECISION (EU) 2017/848 of 17 May 2017 Laying down Criteria and Methodological Standards on Good Environmental Status of Marine Waters and Specifications and Standardised Methods for Monitoring and Assessment, and Repealing Decision 2010/477/EU. 2017. Available online: http://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32017D0848&from=EN (accessed on 16 April 2018).
- Parra, L.; Sendra, S.; García, L.; Lloret, J. Design and Deployment of Low-Cost Sensors for Monitoring theWater Quality and Fish Behavior in Aquaculture Tanks during the Feeding Process. Sensors 2018, 18, 750. [Google Scholar] [CrossRef] [PubMed]
- Simbeye, D.; Yang, S.F. Water Quality Monitoring and Control for Aquaculture Based on Wireless Sensor Networks. J. Netw. 2014, 9, 840–849. [Google Scholar] [CrossRef]
- Cario, G.; Casavola, A.; Gjanci, P.; Lupia, M.; Petrioli, C.; Spaccini, D. Long lasting underwater wireless sensors network for water quality monitoring in fish farms. In Proceedings of the OCEANS ’17 IEEE, Aberdeen, Scotland, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Rundtop, P.; Frank, K. Experimental evaluation of hydroacoustic instruments for ROV navigation along aquaculture net pens. Aquac. Eng. 2016, 74, 143–156. [Google Scholar] [CrossRef]
- Duda, A.; Schwendner, J.; Stahl, A.; Rundtop, P. Visual Pose Estimation for Autonomous Inspection of Fish Pens. In Proceedings of the OCEANS’15 MTS/IEEE, Genova, Italy, 18–21 May 2015. [Google Scholar]
- Borović, B.; Vasilijević, A.; Kuljača, O. Potentials of Using Underwater Robotics for Fishing and Fish Farming. In Proceedings of the 10th International Workshop Methods for the Development and Evaluation of Maritime Technologies—DEMaT’11, Split, Croatia, 21–23 June 2011. [Google Scholar]
- Takagi, M.; Mori, H.; Yimit, A.; Hagihara, Y.; Miyoshi, T. Development of a Small Size Underwater Robot for Observing Fisheries Resources—Underwater Robot for Assisting Abalone Fishing. J. Robot. Mechatron. 2016, 28, 397–403. [Google Scholar] [CrossRef]
- Eichhorn, M.; Taubert, R.; Ament, C.; Jacobi, M.; Pfuetzenreuter, T. Modular AUV System for Sea Water Quality Monitoring and Management. In Proceedings of the OCEANS ’13 MTS/IEEE, Bergen, Norway, 10–13 June 2013. [Google Scholar]
- Taubert, R.; Eichhorn, M.; Ament, C.; Jacobi, M.; Karimanzira, D.; Pfuetzenreuter, T. Model Identification and Controller Parameter Optimization for an Autopilot Design for Autonomous Underwater Vehicles. In Proceedings of the OCEANS ’14 MTS/IEEE, Taipei, Taiwan, 7–10 April 2014. [Google Scholar]
- Karimanzira, D.; Jacobi, M.; Pfuetzenreuter, T.; Rauschenbach, T.; Eichhorn, M.; Taubert, R.; Ament, C. First testing of an AUV mission planning and guidance system for water quality monitoring and fish behavior observation in net cage fish farming. Information Processing in Agriculture. Inf. Process. Agric. 2014, 1, 131–140. [Google Scholar] [CrossRef]
- -4H-JENA engineering GmbH. From the Sea Floor to the Stars—Customized Technology. Available online: http://www.4h-jena.de/en/start (accessed on 16 April 2018).
- Sea-Bird Scientific. SUNA V2 Datasheet. Available online: http://www.seabird.com/sites/default/files/documents/datasheet_SUNAV2_0.pdf (accessed on 18 April 2018).
- Sea-Bird Scientific. ISUS V3 Datasheet. Available online: http://www.seabird.com/sites/default/files/documents/datasheet_isusv3.pdf (accessed on 18 April 2018).
- MacIntyre, G.; Plache, B.; Lewis, M.R.; Andrea, J.; Feener, S.; McLean, S.D.; Johnson, K.S.; Coletti, L.J.; Jannasch, H.W. ISUS/SUNA nitrate measurements in networked ocean observing systems. In Proceedings of the Oceans 2009 MTS/IEEE, Biloxi, MS, USA, 26–29 October 2009. [Google Scholar]
- Pfuetzenreuter, T.; Renkewitz, H. ConSys—A new software framework for underwater vehicles. In Proceedings of the OCEANS ’10 IEEE, Sydney, Australia, 24–27 May 2010. [Google Scholar]
- Kalwa, J. The GREX-Project: Coordination and control of cooperating heterogeneous unmanned systems in uncertain environments. In Proceedings of the OCEANS ’09 IEEE, Bremen, Germany, 11–14 May 2009. [Google Scholar]
- Simonetti, P.J. Slocum Glider, Design and 1991 Field Trials; Technical report; Webb Research Corporation: North Falmouth, MA, USA, 1992. [Google Scholar]
- Aanderaa Data Instruments AS. Data & Specification Sheets, Conductivity Sensor 3919. Available online: http://www.aanderaa.com/media/pdfs/Conductivity-Sensor-3919.pdf (accessed on 16 April 2018).
- Aanderaa Data Instruments AS. Data & Specification Sheets, Oxygen Sensor 3835. Available online: http://www.aanderaa.com/media/pdfs/Oxygen-Optode-3835-4130-4175.pdf (accessed on 16 April 2018).
- IEC. International electrotechnical vocabulary—Part 351: Control technology (IEC 60050-351:2013). 2014. Available online: http://www.electropedia.org/iev/iev.nsf/display?openform&ievref=351-45-32 (accessed on 4 June 2018).
- Kitani, O. CIGR Handbook of Agricultural Engineering: Animal Production and Aquacultural Engineering; American Society of Agricultural Engineers: St. Joseph, MI, USA, 1999; Volume 2. [Google Scholar]
- Fofonoff, N.M.R., Jr. Algorithms for Computation of Fundamental Properties of Seawater; Technical Report; UNESCO: Paris, France, 1983. [Google Scholar]
- CSIRO. SeaWater MATLAB Library. Available online: http://www.cmar.csiro.au/datacentre/ext_docs/seawater.htm (accessed on 16 April 2018).
- Copernicus Marine Environment Monitoring Service. Providing Products and Services for All Marine Applications. Available online: http://marine.copernicus.eu/ (accessed on 16 April 2018).
- Hydroid Inc. Remus 100 Autonomous Underwater Vehicle. Available online: https://www.hydroid.com/sites/default/files/product_pages/New_Generation_REMUS_100_%20Brochure_2017_1.pdf (accessed on 16 April 2018).
- OceanScan. Light Autonomous Underwater Vehicle. Available online: http://www.oceanscan-mst.com/light-autonomous-underwater-vehicle/#vehicle-specifications (accessed on 16 April 2018).
- L3 OceanServer. Affordable Work Class Autonomous Underwater Vehicle (AUV). Available online: http://www.iver-auv.com/AP_003_Iver3.pdf (accessed on 16 April 2018).
- Eichhorn, M. A reactive obstacle avoidance system for an autonomous underwater vehicle. In Proceedings of the 16th IFAC world congress. Prague, Czech Republic, 3–8 July 2005; pp. 331–336. [Google Scholar]
- Sea-Bird Scientific. Glider Payload CTD (Optional DO). Available online: http://www.seabird.com/sites/default/files/documents/GliderPayloadCTDBrochureAug15.pdf (accessed on 22 April 2018).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Length | 2.20 m |
| Diameter | 0.30 m |
| Weight in air | 135 kg |
| Max. speed | 6 kn |
| Endurance at 3 kn | 3 h |
| Payload | 15 kg |
| Parameter | Measuring Range/Value |
|---|---|
| Sodium nitrate NaNO | 43–2000 g/L |
| Oxygen concentration O | 0–500 mol/L |
| Conductivity | 0–75 ms/cm |
| Temperature T | −5–40 C |
| Measurement cycle | 1 s (O, )/ 5–10 s NaNO |
| Power Supply (Computer) | 12 V |
| Power Supply (Sensors) | 19–25 V |
| Energy Consumption | 12 W (12 V)/10 W (22 V) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eichhorn, M.; Ament, C.; Jacobi, M.; Pfuetzenreuter, T.; Karimanzira, D.; Bley, K.; Boer, M.; Wehde, H. Modular AUV System with Integrated Real-Time Water Quality Analysis. Sensors 2018, 18, 1837. https://doi.org/10.3390/s18061837
Eichhorn M, Ament C, Jacobi M, Pfuetzenreuter T, Karimanzira D, Bley K, Boer M, Wehde H. Modular AUV System with Integrated Real-Time Water Quality Analysis. Sensors. 2018; 18(6):1837. https://doi.org/10.3390/s18061837
Chicago/Turabian StyleEichhorn, Mike, Christoph Ament, Marco Jacobi, Torsten Pfuetzenreuter, Divas Karimanzira, Kornelia Bley, Michael Boer, and Henning Wehde. 2018. "Modular AUV System with Integrated Real-Time Water Quality Analysis" Sensors 18, no. 6: 1837. https://doi.org/10.3390/s18061837
APA StyleEichhorn, M., Ament, C., Jacobi, M., Pfuetzenreuter, T., Karimanzira, D., Bley, K., Boer, M., & Wehde, H. (2018). Modular AUV System with Integrated Real-Time Water Quality Analysis. Sensors, 18(6), 1837. https://doi.org/10.3390/s18061837