1. Introduction
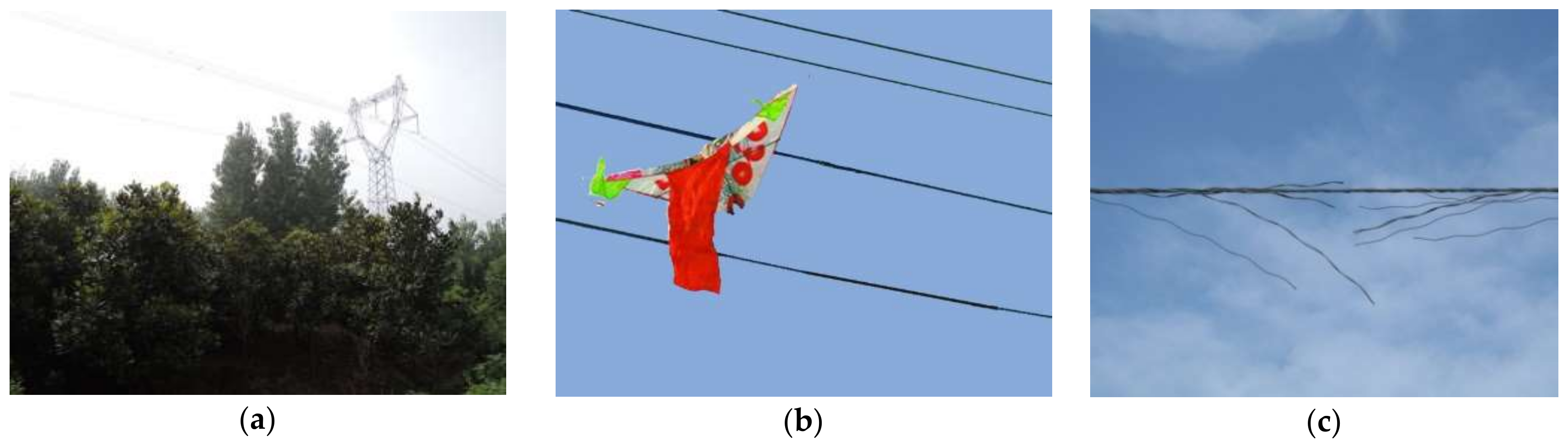
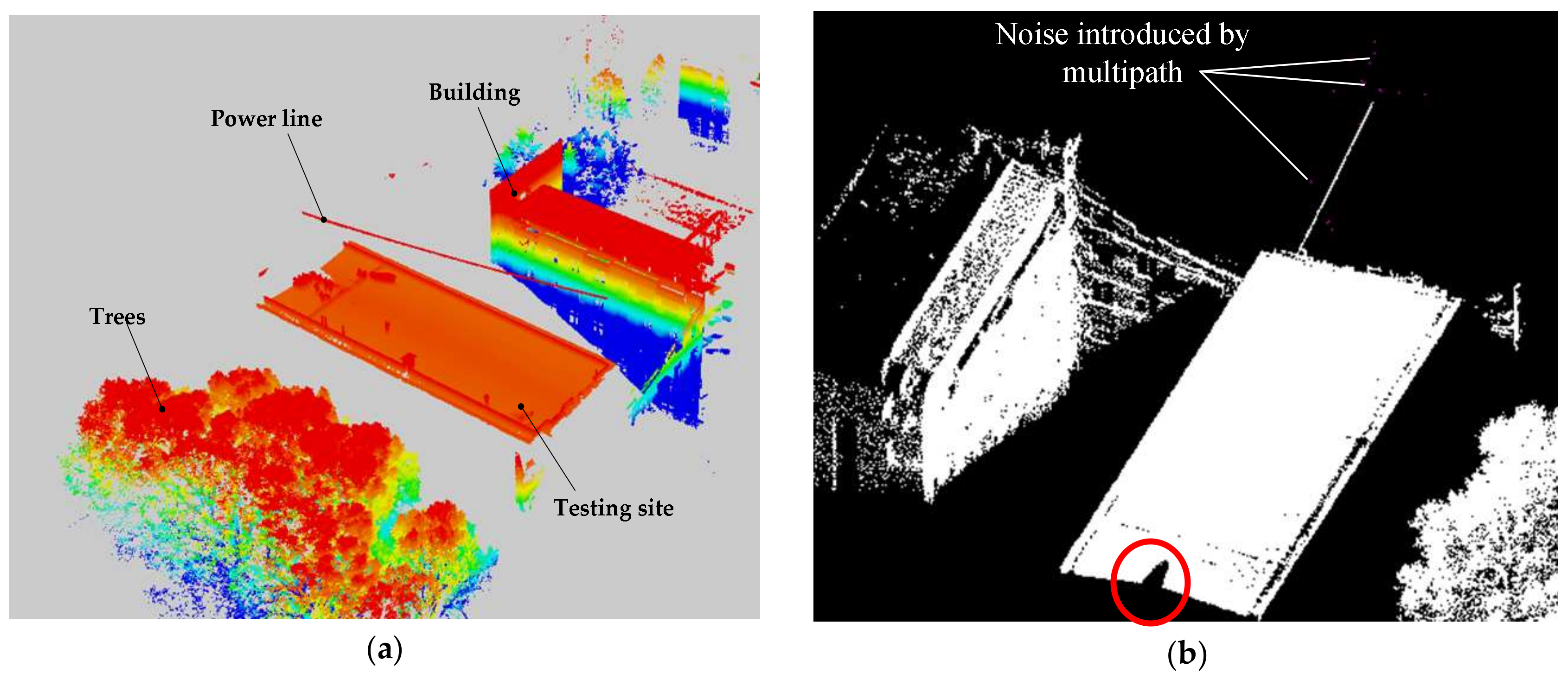
Power lines are important parts of the national power grid. With the development of the economy, power towers and power lines are rapidly increasing. The safe operation of a power line is facing many challenges, as shown in
Figure 1. Firstly, power lines are extending into dense forests. The long branches could cause line tripping, and at the same time, people pay more attention to the protection of vegetation, further exacerbating the contradiction of trees and power lines exhibited in
Figure 1a. Secondly, the impact of human activities is increasing, especially in the vicinity of urban areas, and attachment objects such as kites and balloons are frequently attached to power lines that can cause security risks, as shown in
Figure 1b [
1]. Thirdly, power lines exposed in the wild suffer from mechanical tension and electrical flashover, leading to the problem of broken strands, as shown in
Figure 1c. Therefore, it is very important to regularly inspect power lines to ensure their stable operation [
2].
The traditional patrolling method is time-consuming, laborious, and has a low positioning accuracy, making it difficult to meet the requirements [
3]. With the rapid development of detection technology, the use of a LiDAR measurement system is a good way to solve these problems [
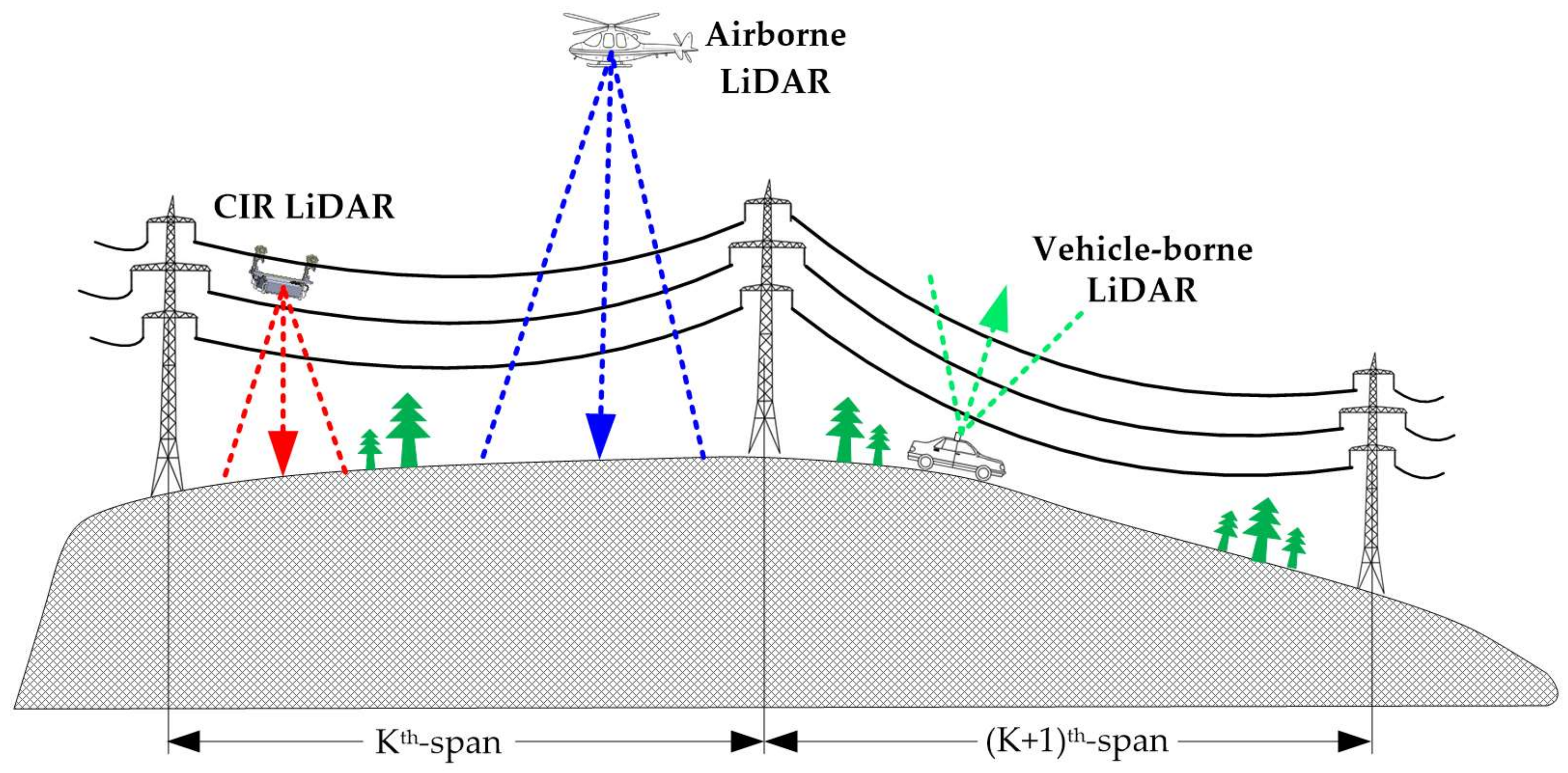
4]. As a result, airborne LiDAR and vehicle-borne LiDAR are increasingly used in power line inspection. From the perspective of the current application situation, airborne LiDAR is not subject to geographic factors and can collect large-scale spatial data relating to power lines. So, it has been obviously effective in terms of power line modeling and safe distance measurement [
5]. However, airborne LiDAR is highly restricted by high-speed flying and long-distance scanning, resulting in large point cloud spots and sparse point clouds. The point clouds of airborne LiDAR can describe the approximate shape of power lines, but cannot obtain the precise data of inspection objects on the power lines or their surrounding areas [
6]. Vehicle-borne LiDAR can collect finer point clouds of power lines at close range [
7]. However, vehicle-borne LiDAR cannot run across mountains along power lines, mainly used in parts of urban areas [
8]. The ability to combine the collection ability of airborne LiDAR and collection quality of vehicle-borne LiDAR requires obtaining high-quality point clouds of power lines, which is the source of research in this paper to expand the current inspection content of LiDAR in the field of power line inspection.
The cable inspection robot (CIR), a special robot, is used for the inspection of power lines [
9,
10]. The State Grid has implemented the automatic inspection demonstration application of CIR across primeval forests [
11]. CIR has gradually matured, possibly providing a new carrying application of LiDAR. The main contribution of this paper is to construct the segmentation strategy from the layer to the block based on prior information and position and orientation system (POS) data, i.e., the walking trajectory of CIR, and to propose a complete method of detecting various inspection targets of power lines. The proposed method can automatically detect these small-size inspection objects on the power line, such as dampers, and obtain their geometrical models and precise locations. The recognition of these inspection objects is a good complement to the current spatial model of the point cloud of the transmission corridor, thus establishing a complete 3D model of the transmission corridor. Based on the 3D model, inspectors can guide power robots to accurately locate these abnormal points to diagnose or maintain, effectively improving the intelligent level of power line inspection.
2. Literature Review
The inspection objects extracted from LiDAR data mainly involve three aspect works, i.e., ground point removal, power line extraction, and inspection object recognition. The literature review elaborates on these three aspects, respectively.
Ground point removal from the original point cloud, retaining these waiting-classification points, is called filtering [
12]. Filtering directly determines the quality of subsequent point cloud processing. Many scholars have studied the filtering methods of laser point cloud data, which are roughly divided into two categories: the partial extension method and interpolation method. The former method refers to local to a wide range of terrain, including the morphology filtering method [
13,
14] and the terrain slope filtering method [
15]. The latter method’s scale is from global gradually refined to local, and the typical methods are the linear prediction method proposed by Kraus et al. [
16,
17] and the Triangular Irregular Networks (TIN) proposed by Axelsson [
18]. The interpolation method is more extensive due to its practical application. The essence of interpolation is a densified process in an iterative process, which is greatly influenced by the initial digital elevation model (DEM), and there is an error accumulation. Therefore, in mountainous areas with great fluctuation, the parameter of the algorithm needs to be carefully considered before filtering. In addition, ISPRS Working Group III/3 [
19] conducted a test to determine the performance of the eight filtering algorithms, both qualitatively and quantitatively. Their conclusion was that all filtering algorithms would produce errors in complex urban areas and rough terrain with vegetation. In sum, the filtering algorithm is time-consuming and usually takes up about 60–80% of the laser point cloud data processing time and computing resources [
20].
Many researches have focused on power line extraction from airborne laser scanning (ALS) data. Melzer and Brieser [
21] extracted power line points using a bottom-up strategy and applied the 2D Hough transform and RANSAC algorithm to identify power lines. McLaughlin [
22] classified power line points based on their point features using a Gaussian mixture model for distinguishing power lines from their surroundings. Jwa et al. [
23] proposed a voxel-based piecewise line detector (VPLD) algorithm to extract power line points by a comprehensive approach combining the Hough transform, feature eigenvectors, and point density. Zhu and Hyyppa [
24] firstly identified power line candidate points by statistical analysis considering height, point density, and histogram thresholds, which were then converted to 2D images with the image processing method to extract power lines from ALS data. However, the experimental results show that the point distance of ALS data will widen with increased flight height [
25], for example, in reference [
26], the point clouds were obtained at a height of 400 m, so the point distance reached 1 m. Therefore, better extraction results cannot be obtained due to a higher flight height. To obtain a high-quality power line point cloud, there have been some studies of power line extraction based on mobile laser scanning (MLS) data. Ou et al. [
27] made an attempt to extract a power line point cloud based on a height constraint and the Hough transform from MLS data. Cheng et al. [
28] firstly proposed a voxel-based hierarchical method to extract power line points from MLS data. Then, a bottom-up method and clustering recovery procedures were used to identify each power line. There are two limitations to power line extraction from MLS data: one is that many thresholds are specified by experience; and the other is the frequent occlusions by trees or buildings. Power line points of MLS present a dense breakage-dense distribution pattern, greatly influencing the extraction accuracy.
There are very few reports on inspection object recognition of power lines, because of the difficulty in obtaining high-quality point clouds. Therefore, a review of studies that propose specific approaches of recognizing components of electrical substations from LiDAR data is provided for sharing similarities with inspection objects on the power line. Xu et al. [
29] introduced typical LiDAR applications in the electrical power industry by employing LiDAR data, such as power lines and electrical substations. They pointed out the most important work for power line checking was to find the abnormal equipment, dangerous points, and the threat to lines. However, these works are limited by the distance between lines and buildings, and whether vegetation was suitable for the safety requirement. Arastounia and Lichti [
30] proposed a knowledge-based segmentation method finding the principle direction of points’ distribution to recognize points on insulators from a subset of an electrical substation point cloud. Then, they [
31] improved an automated methodology to recognize six key components of electrical substations. In this article, they indicated that, at present, no comprehensive automated solution has been proposed to recognize all components of electrical substations from LiDAR data due to the complexity of the parts. The case is similar for recognizing inspection objects of power lines. Therefore, this is followed by a review of the types of geometric primitive methods for segmentation and object recognition from LiDAR data. Sohn et al. [
32] employed a Markov random field (MRF) classifier, which emphasized the roles of the spatial context of linear and planar features as in a graphical model. Belton and Lichti [
33] proposed a segmentation algorithm through local covariance analysis to segment smooth surfaces, edges, and boundaries in an industrial site comprising planar and cylindrical surfaces. Pu and Vosselman [
34] segmented planar surfaces using a surface-growing algorithm, which recognized various objects by semantic features. Zhu et al. [
35] segmented planar surfaces using PCA and eigenvalues analysis.
This paper is organized as follows.
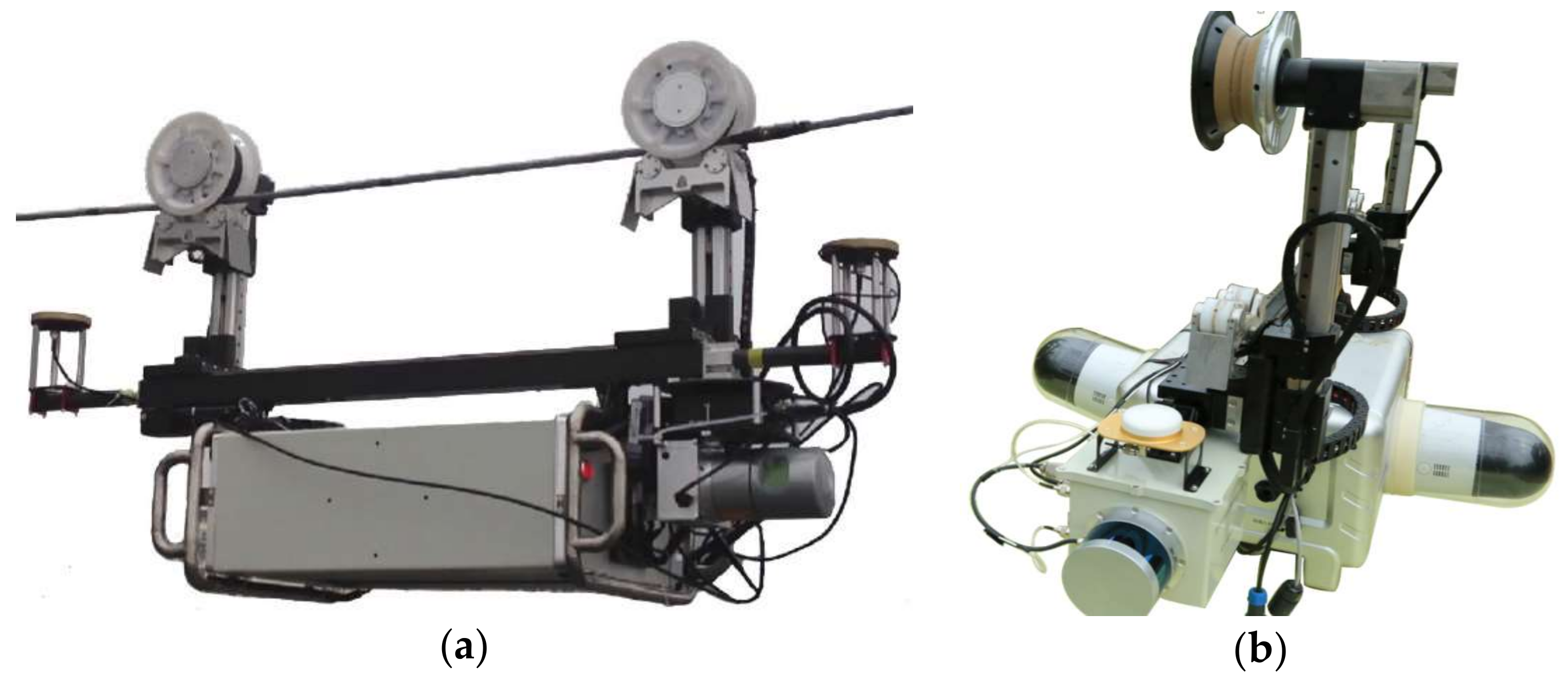
Section 3 outlines the CIR LiDAR system, and analyzes the new characteristics of CIR LiDAR data.
Section 4 details the novel inspection object extraction method.
Section 5 illustrates the three datasets to verify the effectiveness and feasibility of the proposed method.
Section 6 expounds the results of all datasets and provides the corresponding discussions. Conclusions are drawn in the last section.
4. Methodology
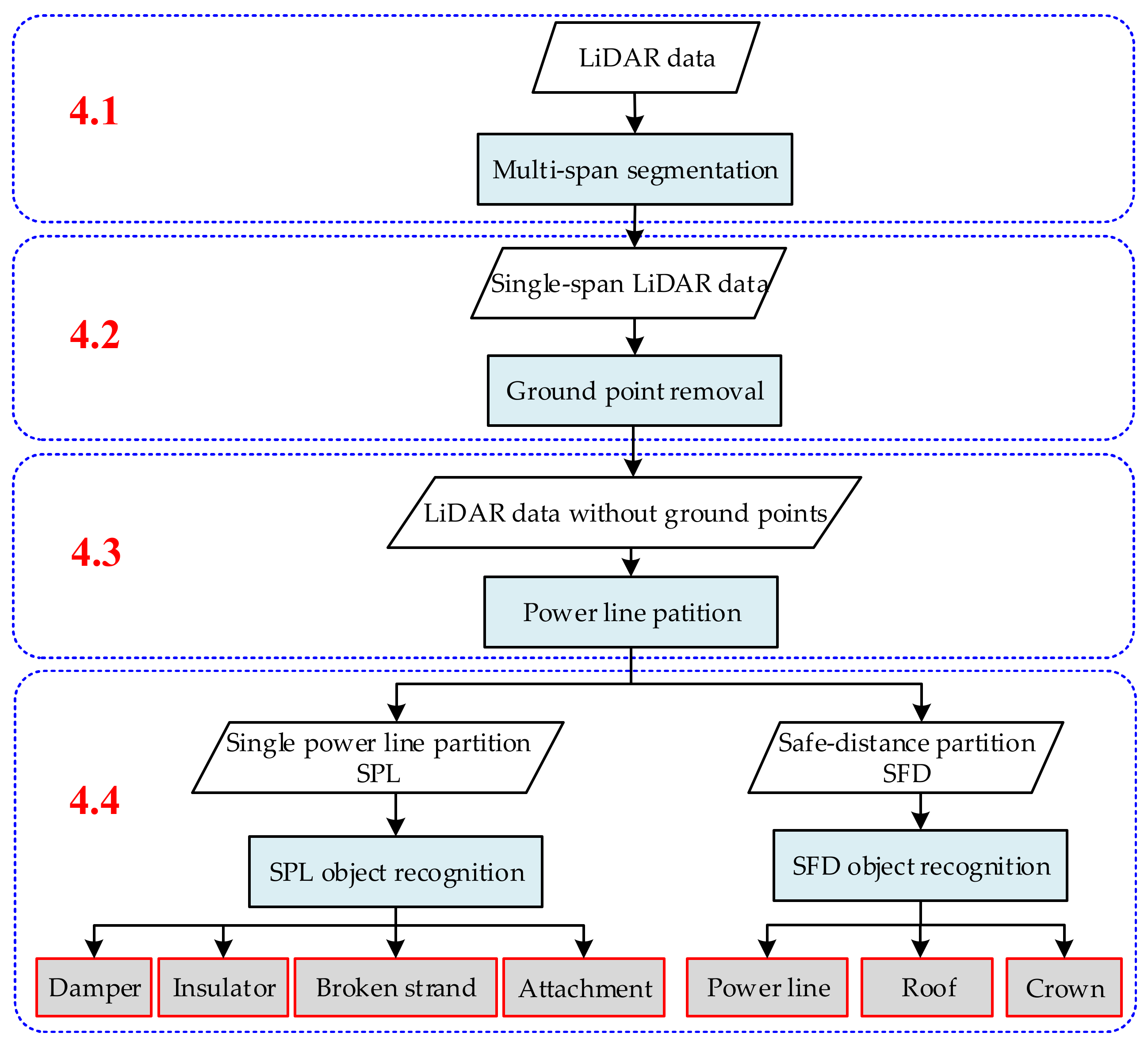
The methodology is described in the following four subsections, as shown in
Figure 4. In
Section 4.1, the original point cloud collected by CIR LiDAR is divided into single-span point cloud datasets. In
Section 4.2, a large number of ground points are removed in a single-span point cloud dataset, while the remaining points are retained with close-relationship power line points. In
Section 4.3, the remaining point cloud is divided into two partitions, i.e., single power line (SPL) partition and safe distance (SFD) partition, which permits us to better classify and recognize inspection objects in different partitions. In the last section, the abnormal point clouds in different partitions are identified as the specific inspection objects.
4.1. Multi-Span Segmentation
The original point cloud collected by CIR LiDAR usually includes multi-span data. For the same transmission line, the distributions and trends of power lines are basically identical for the multi-span segment. In addition, CIR POS data to generate point clouds can reflect geographic information. In our study, a span segment dataset is regarded as our data processing object. We mainly focus on detecting inspection objects surrounding power lines, so the single-span dataset does not contain the tower data. In order to ensure the safe operation of the robot on the ground wire, a variety of position sensors are installed on the body of CIR. The fusion of position data derived CIR position sensors and LiDAR data is undertaken to generate the high-precision CIR POS. When the robot passes through different span segments, it presents the obvious uphill-downhill process. By analyzing the symbol change of the angle data measured by the angle sensors, the center points can be defined as the suspension points to segment multi-span data so that the original point cloud is divided into single-span datasets.
4.2. Ground Point Removal
Although the original point cloud is divided into single-span datasets, the dataset of a span still has a very large number of points due to CIR scanning at a low speed. It provides the possibility for object recognition and also causes the difficulty of data processing. Therefore, a large number of ground points need to be removed to free up computing resources. We do not use the existing filtering algorithms, but make full use of the strict power line construction specification and the elevation of CIR POS to construct the optimal elevation threshold defined as Equation (1):
where
is the optimal elevation threshold;
is the lowest height of POS in the single-span segment; and
is the vertical distribution matrix for all power lines in single-span segment. The erection specification of power lines can provide accurate prior data.
d is the adjusted value specified by the specific situation of the power line and inspection requirement. Therefore, these points, corresponding to their Z-coordinate less than the
, belong to ground points that will be eliminated from the single-span point cloud. At the same time, these points closely related to power lines are also well preserved.
4.3. Power Line Partition
This section will further partition the single-span point cloud after ground point removal. The aim of power line partition includes three aspects: First, the inspection objects are different in different areas of the power line, so different algorithms can be used to identify them to reduce the difficulty of recognition; second, the sizes of inspection objects greatly change in different areas of the power line, and the partition is convenient to set the appropriate thresholds to improve the accuracy of recognition; and third, many inspection objects distributed around power lines are small, so are difficult to identify. Power line partition can highlight the characteristics of the point cloud of the inspection object and reduce the interferences of other points to ensure the accuracy of recognition. The partition strategy aims to divide from “layer” to “block” according to the distributions of power lines and inspection requirements. The model of the power line is catenary, which cannot simply partition through the elevation. Therefore, we propose a structured partition based on a POS data (SPPD) algorithm that reflects the characteristics of power lines in a span segment.
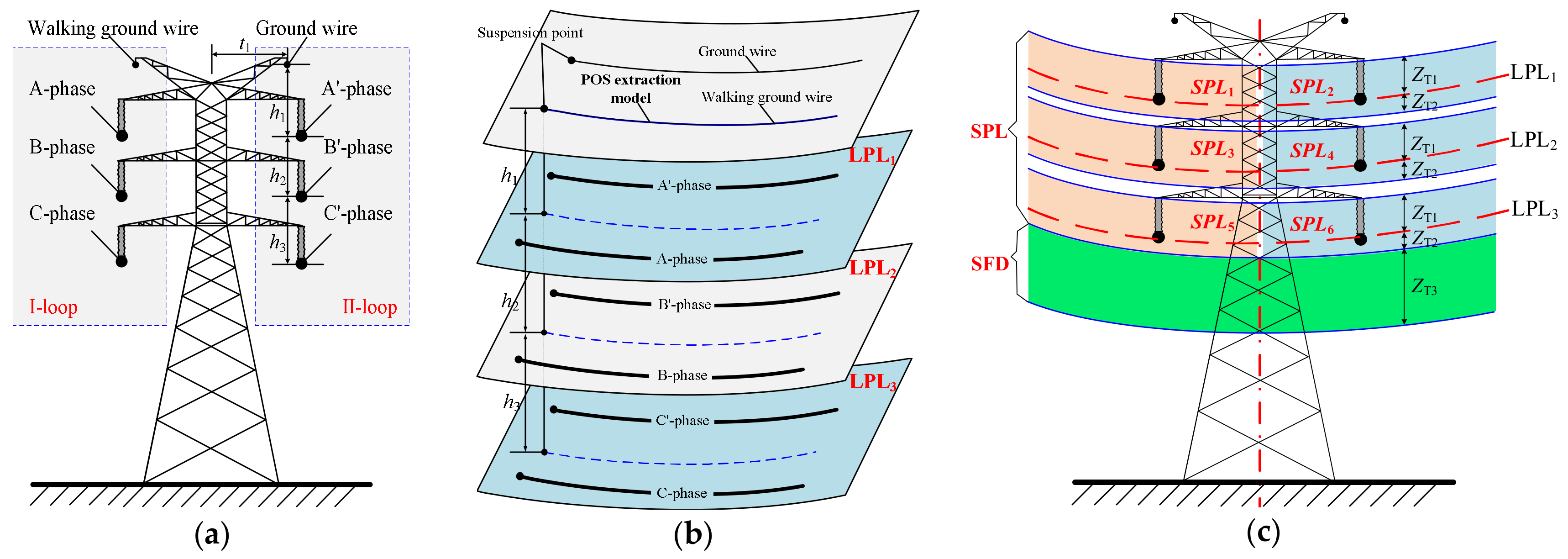
In this paper, a typical double-loop transmission line is taken as an example to illustrate the specific process of the SPPD algorithm from “layer” to “block”. There are two ground wires and six power lines (in this paper, power lines do not consider as multi-bundle wires). The erection specification of power lines is shown in
Figure 5a.
First, partition at the layer-level is undertaken, as illustrated in
Figure 5b. The six power lines are divided into three layers by the erection specification of the power line. The positions of the three layers, i.e., LPL
1, LPL
2, and LPL
3, can be determined based on the POS extraction model and the clearances (
h1,
h2, and
h3). The LPL
3, the lowest layer, is also labeled as LPL
last.
Second, partition at the block-level is completed, as illustrated in
Figure 5c. The LPL
1 surface is upward shifted
ZT1 (
ZT1 = L, L is the length of the insulator) as the upper boundary, and downward shifted
ZT2 (
ZT1 = L/2) as the lower boundary. The block area enclosed by these two surfaces includes two power lines. The center plane of the tower is used to split the block area into two sub-partitions (i.e.,
SPL1 and
SPL2). For the LPL
2 and LPL
3 layers, the
SPL3–
SPL6 partitions can be respectively obtained by the above process. For the lowest layer LPL
last, the LPL
last surface is downward shifted
ZT2 as the upper boundary, and downward shifted
ZT3 as the lower boundary. The block area enclosed by the surfaces is defined as the SFD partition.
Finally, these power lines are divided into six SPL partitions and one SFD partition. In each SPL partition, there is only one power line and its surrounding point cloud, which mainly detects fittings and abnormal points closely related to power lines. In SFD partition, including the point clouds under the lowest power line, this partition mainly detects the hidden dangers below the lowest power line.
In this paper, the steps of the SPPD algorithm [
36] are listed as follows:
- (1)
The 3D point cloud projected to the vertical plane of POS is used to generate a 2D point cloud;
- (2)
The extraction model is built up by fitting the POS data on the vertical plane;
- (3)
Due to the additional sag resulting from the self-weight of CIR, the extraction model is modified with the additional sag, as follows:
where is the additional sag; S is the cross-sectional area of ground wire; W is the weight of CIR; L is the horizontal spacing; is the horizontal stress of the power line; and is the increased coefficient of the impact effect. These parameters are stored in the CIR inspection database.
- (4)
The point clouds of SPL and SFD partitions are extracted by the modified extraction model and the parameters (ZT1, ZT2, ZT3);
- (5)
The 2D point cloud is mapped back to three-dimensional space to obtain the 3D point clouds of two kinds of partitions.
4.4. Inspection Object Recognition
The different types of inspection objects have their own characteristics [
37], as illustrated in
Table 1. The abnormal points can be recognized through distribution features of point clouds and geometric characteristics of objects.
According to the feature description in
Table 1, there are regular distribution areas of various inspection objects. Therefore, the two algorithms are used to recognize objects in SPL and SFD partitions, respectively.
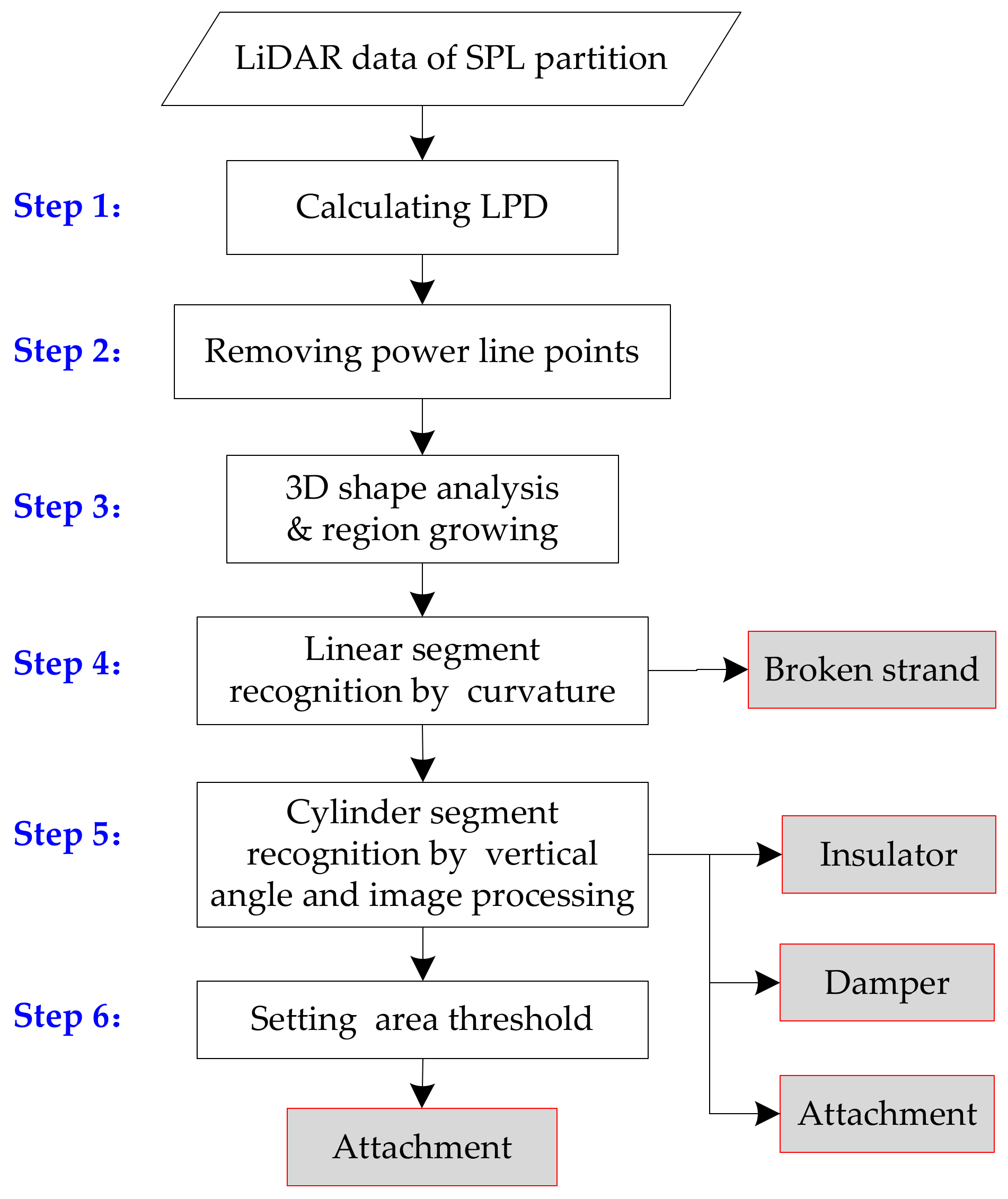
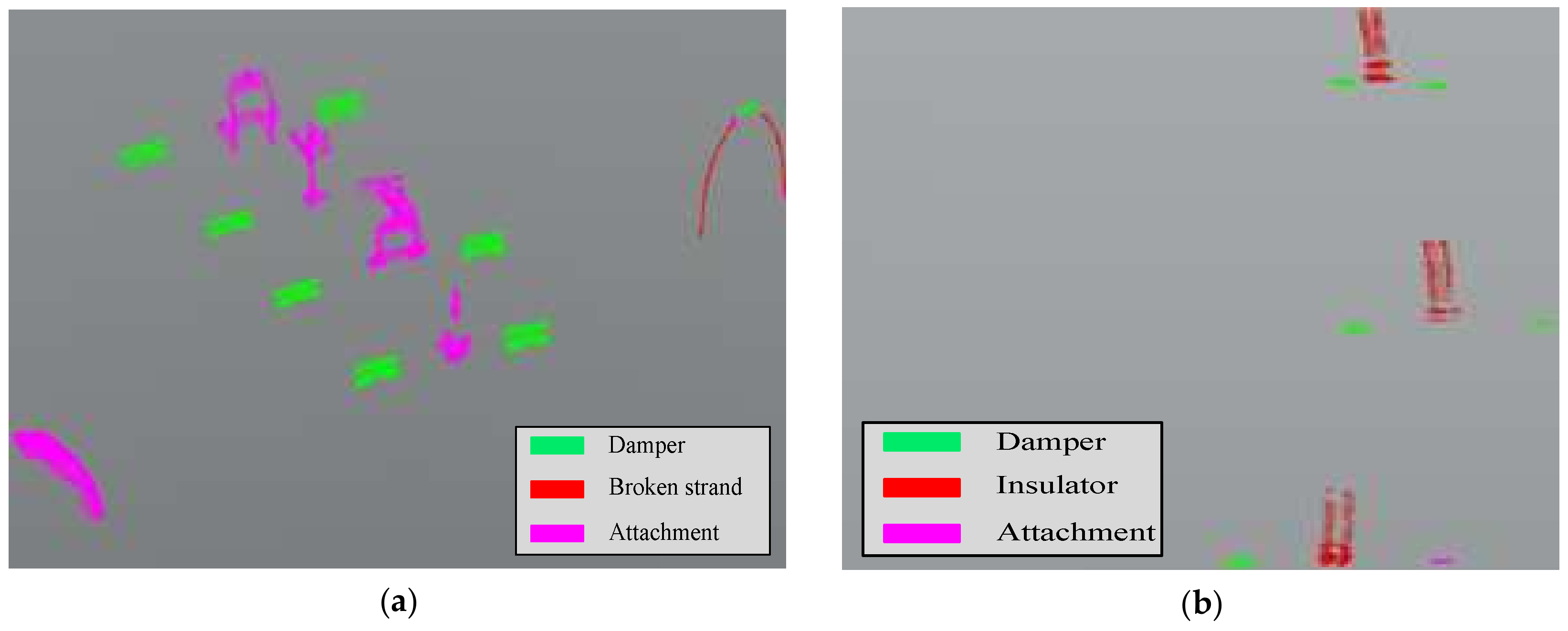
4.4.1. Recognition in SPL Partition
In the SPL partition, the inspection objects mainly include a damper, insulator, broken strand, and attachment. The algorithm flow on the recognition of these objects is shown as
Figure 6.
The specific procedures are listed as follows.
- Step 1
Step 1 Calculate local point density (LPD) of each point in the dataset
S defined as [
38]:
where S is point set of the SPL partition; Di is the local point cloud density of the point pi; k is the number of the nearest neighbor points of the reminded point; and dk is the distance between the reminded point and the farthest point in the k-nearest neighbor.
- Step 2
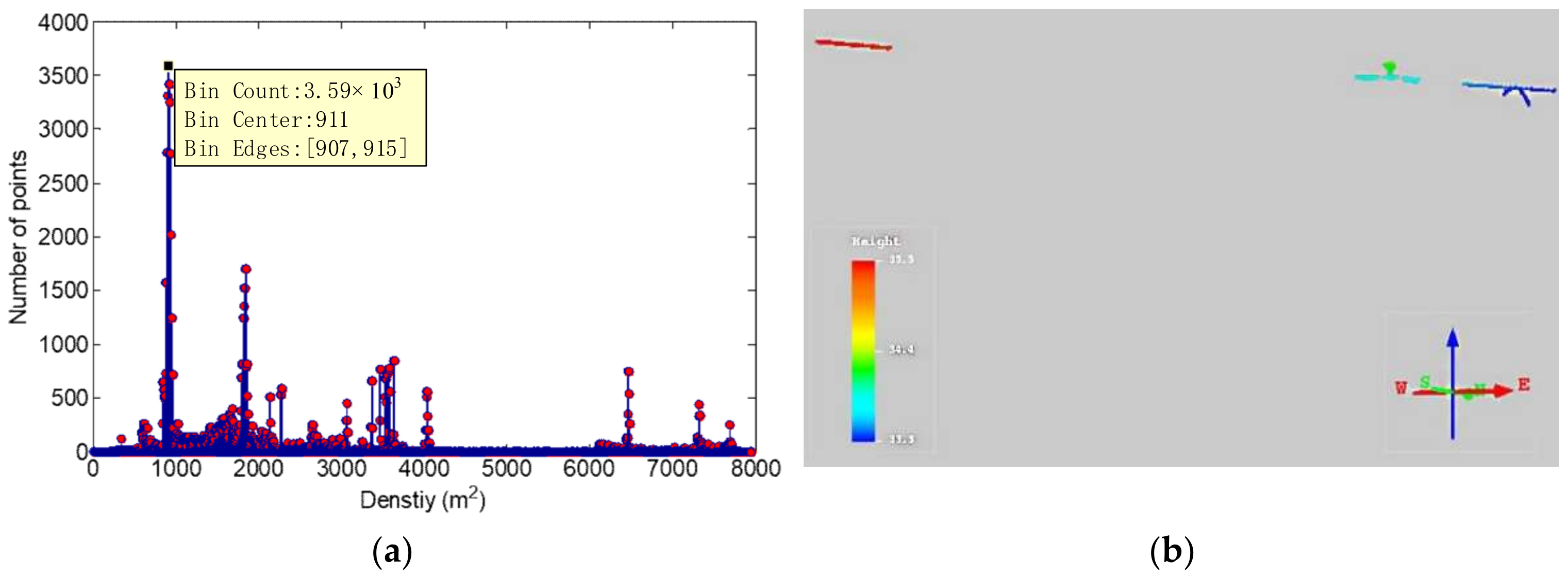
The abnormal point cloud is denser than the point cloud of the power line in SPL partition. In addition, the point cloud of the power line is not only large in quantity, but also connects to these abnormal point clouds. It is not convenient to detect inspection objects, especially for small-size inspection objects. Therefore, this step is employed to remove power line points or sparse points based on the LPD characteristics, only retaining abnormal point blocks with an independent distribution. The threshold of removing power line points is determined from the density histogram of the entire point cloud. The dominant peak corresponding to power line points is automatically identified, from which LPD is determined. These points on the power line or their densities below the power line are then easily removed, and the remaining points are retained for the subsequent processing.
- Step 3
We use principle component analysis (PCA) to analyze the spatial distributions of neighborhoods of points. The optimal neighborhood radius of each point is determined by the neighborhood adaptive method [
39]. The PCA generates three eigenvalues:
λmax,
λmid, and
λmin (
λmax ≥
λmid ≥
λmin ≥ 0), and three eigenvectors:
,
, and
. Each eigenvalue (
λi) represents the dispersion of a neighborhood in the direction of its corresponding eigenvector (
). The eigenvalues are normalized with Equation (4) to generate new eigenvectors
λnmax,
λnmid, and
λnmin.
We assume that points corresponding to the un-removed power line and broken strand are a subset of the linear points, and that points corresponding to the damper and insulator are a subset of the cylindrical points. We define a linear point as a point with λnmax = 1 and λnmid = 0, and a cylindrical point as a point with λnmax > 0.5 and λnmid = λnmin.
The 3D region growing is employed. A point is first chosen at random (the seed), and a new empty component is created. The region growing segments of these points is identified as belonging to the shaped neighborhood. We have empirically verified that it is suitable to set up the threshold of 3D Euclidean distance as 0.15 m. Then, we divide the LiDAR returns into three disjoint subsets: “linear” points, “cylindrical” points, and remaining “block” points.
- Step 4
The un-removed power lines and broken strand in Step 2 are two types of linear objects that appear in LiDAR data of the SPL partition. The power line appears as a straight linear object, while the broken strand appears as a curvilinear object. Therefore, they can be distinguished on the basis of their curvature, and the standard deviations of the object’s principal direction vectors () in three dimensions, i.e., (). If , it means that the linear object is the power line point; if the linear object has at least one non-zero standard deviation along one of the three cardinal directions, it reveals that the linear object is the broken strand.
- Step 5
The damper and insulator are two types of cylindrical objects in SPL partition. In this paper, the damper is parallel to the horizontal installation, and the insulator is perpendicular to the horizontal installation and has a certain length. So, they can be recognized by the vertical angle , i.e., the angle between the object’s principal direction vectors () and the vertical direction, calculated by . These cylindrical objects ( < ) are further identified with the elevation difference . If the value is greater than , the object is the insulator; otherwise, it is the attachment. These cylindrical objects ( > ) will be further identified with the image processing method.
These remaining points are projected in the front view, and are resampled to generate a grayscale image. By binarization, the grayscale image is used to generate the binary image
Ibo. Due to the inhomogeneity of point cloud distribution, there are many holes in the binary image. The binary image
Ib is filled using a morphological closed-operation [
40]. The formula is as follows:
where
B is the structural element; “⊕” represents the dilation operation; and “Θ” represents the erosion operation.
Then, shape matching pretreatment of Ibo is completed. The edge detection is performed using a Canny operator. Then, the shape contour is sorted and marked by means of connected tracking, and the contour points of the object are obtained.
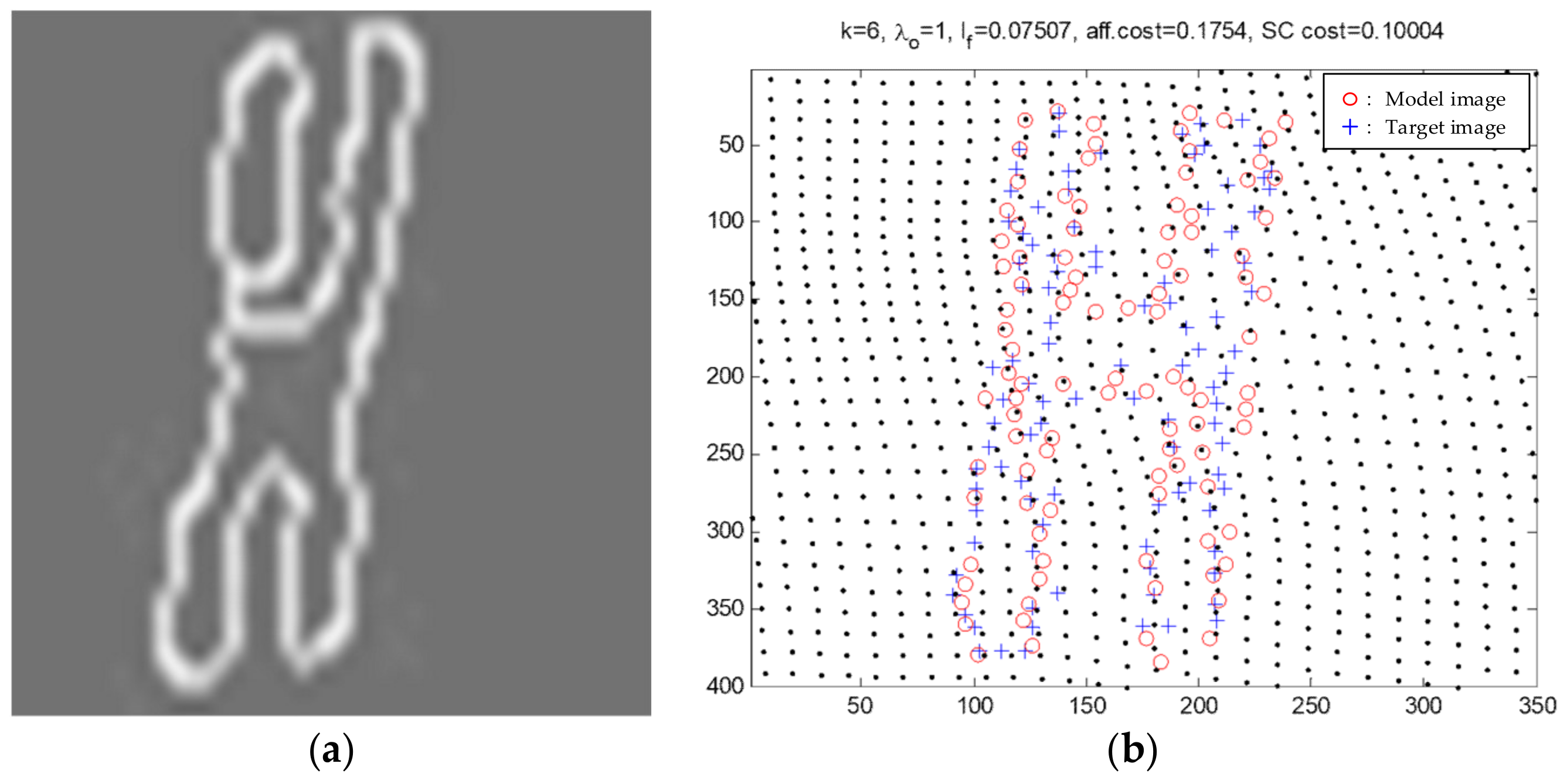
Following this, objects using the shape context (SC) algorithm are identified [
41,
42]. Firstly, contour feature points are uniformly sampled along the boundary. Secondly, the inner distance shape context feature of the contour feature points is extracted to express the form of the shape statistics histogram.
where
is the shape statistics histogram of point
pi of object P;
is the shape statistics histogram of point
qi of object model Q; and
N is the statistic value of the histogram (bins). Thirdly, using the dynamic programming matching algorithm [
43], the optimal solution is obtained by Equation (6), and the matching cost of the whole shape is obtained to identify the damper; otherwise, it is the attachment.
where
is the replacement match, where the sum of matching costs of all points is minimized. Next, the obtained data sets of each object back to 3D space are mapped, and we get the point cloud blocks of the corresponding inspection objects.
- Step 6
For the remaining “block” points, calculate the projection area to the XY-plane, where the point clouds greater than the given threshold are considered as the attachment.
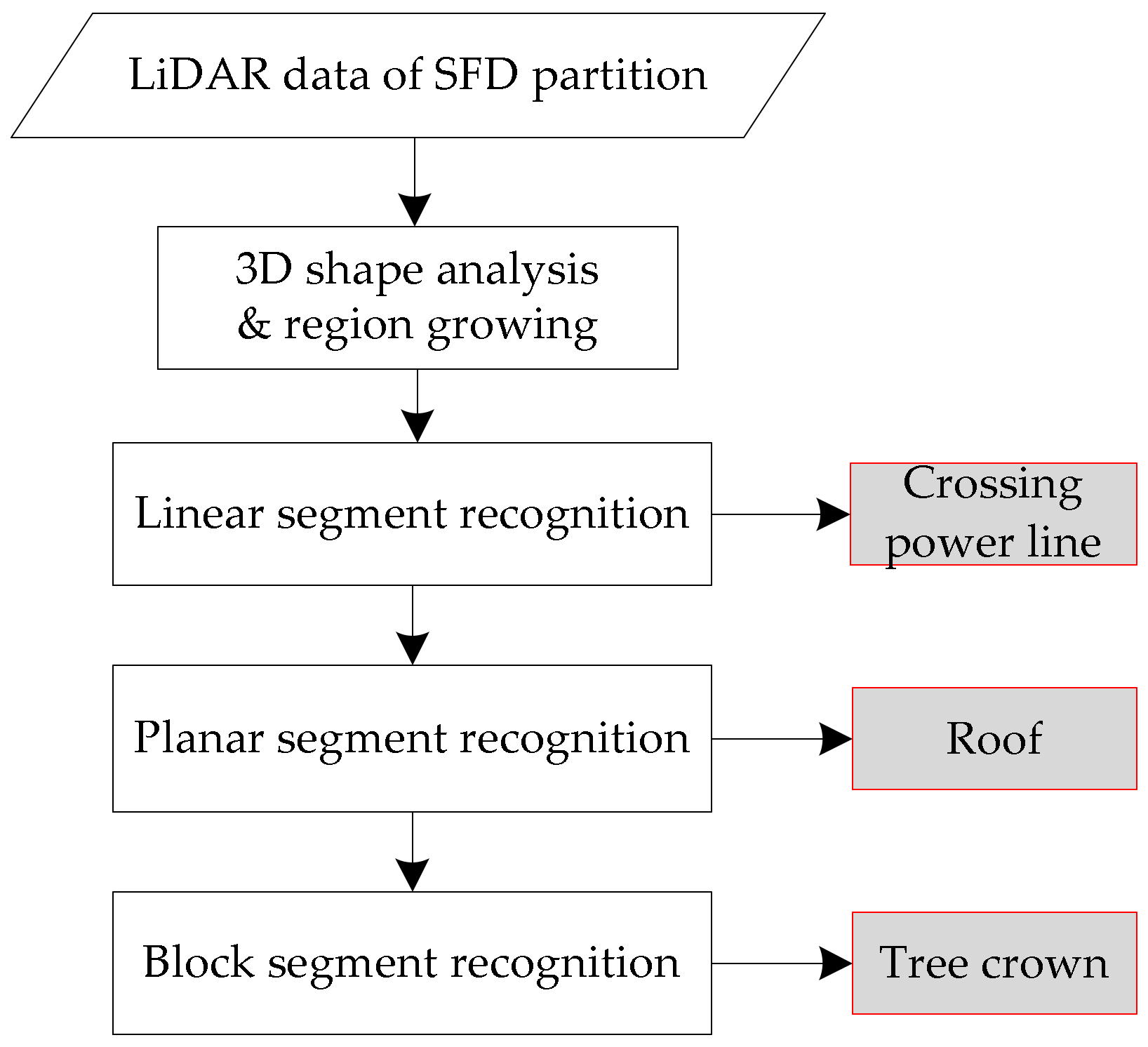
4.4.2. Recognition in SFD Partition
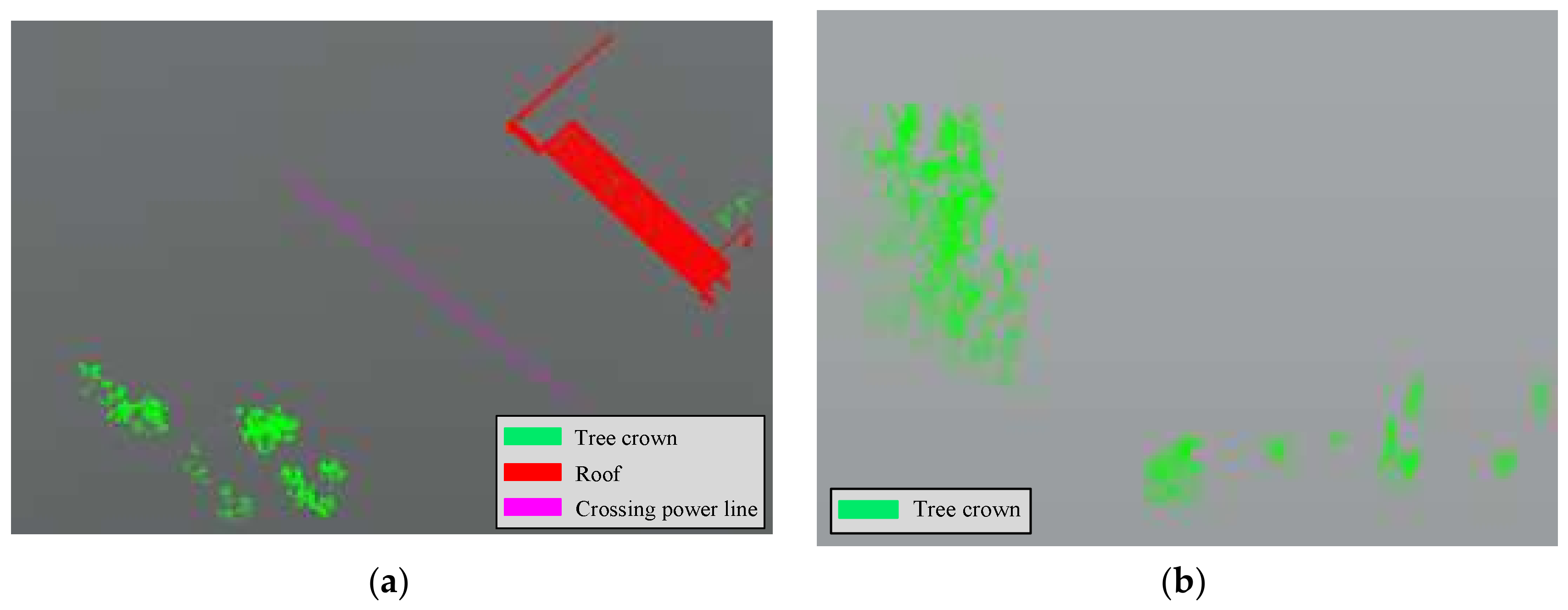
In SFD partition, the inspection objects are relatively simple, mainly including the tree crown, roof, and crossing power line. These objects have large shape sizes. The algorithm flow is used to recognize these objects, as shown in
Figure 7.
The PCA method is used to analyze the spatial distributions of neighborhoods of points. We assume that points corresponding to the crossing power line are a subset of the linear points, and that points corresponding to the roof are a subset of the planar points. Based on the interpretation of PCA as described above, we define a linear point as a point with λnmax = 1 and λnmid = 0, and a planar point as a point with λnmax = λnmid, and λnmin = 0.
The region growing segments of the points is identified as belonging to the linear neighborhood by the threshold of 3D Euclidean distance (2 m), and the cosine of the angle between the principal directions of the neighboring points is greater than the threshold (10°). The region growing segments of the points is identified as belonging to the planar neighborhood by the threshold of 3D Euclidean distance (2 m), and the cosine of the angle between the normal vectors of the neighboring points is greater than the threshold (10°). The region growing segments of the remaining points is the threshold of 3D Euclidean distance (3 m). Then, we divide the LiDAR returns into three disjoint subsets: “linear” points (crossing power line); “planar” points (roof); and remaining “block” points (tree crown).
7. Conclusions
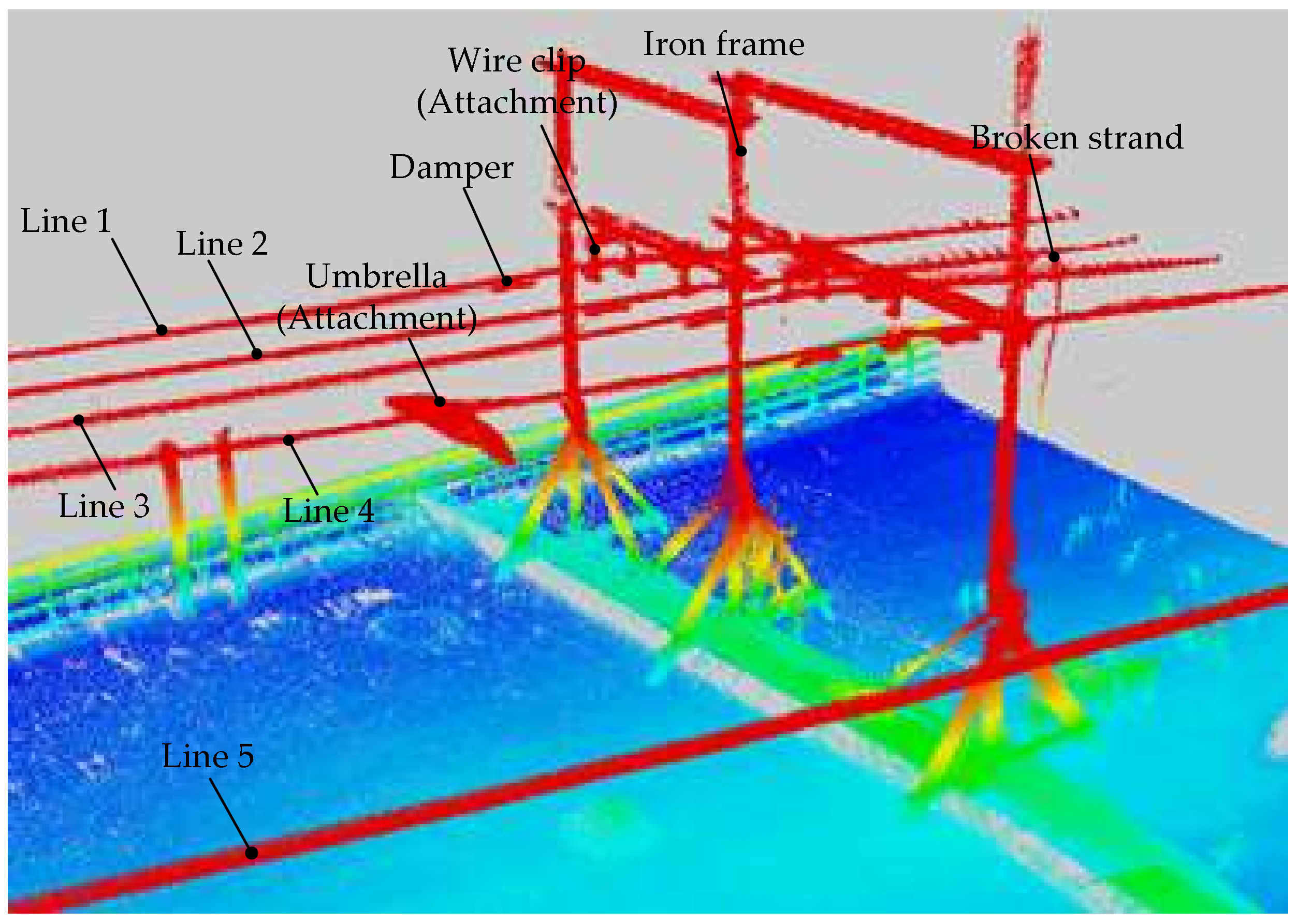
In this study, a new method is proposed to recognize inspection objects surrounding power lines or around the corridors in support of improving the defense capability of the power grid. CIR LiDAR data is sufficiently dense. The number of single-span point clouds is more than 107. Point cloud density is more than three orders of magnitude relative to the ALS point cloud, obtaining precise topologies of small-size inspection objects. The optimal elevation threshold constructed by the CIR POS can be used to quickly remove more than 95% of ground points. The extraction model is constructed by the SPPD algorithm based on CIR POS. Point cloud partition from “layer” to “block” is fully combined with the characteristics of working conditions. The advantage of the SPPD algorithm is that it is able to extract the data of a single power line and its surrounding completely following the shapes of the actual lines. The recognition works are fully focused on a single power line, so as to solve the problem of small-size inspection objects being difficult to directly extract from the original point clouds. Finally, we propose a partition recognition method that defines SFD and SPL partitions to solve the recognition problems caused by the great-size differences of inspection objects. The local neighborhood statistics and the 3D region growing method are used for the recognition of inspection objects in the two partitions. The three datasets achieved an average accuracy of 95.6% at the object level, and achieved an average accuracy of 90.6% and an average precision of 98.2% at the point cloud level, showing a feasible and promising method to extract inspection objects of power lines.
Further research works should mainly focus on two aspects: One is that when CIR LiDAR collects data along the ground wire, the external environment could introduce high noise, such as strong wind, robot skid, etc. How to guarantee the performance of the proposed method can be studied in such conditions. The other is the classification and recognition methods of point clouds, which should be further updated and developed. In the future, focusing on the categories and features of inspection objects, the recognition algorithm will be further improved in terms of the detection efficiency and recognition accuracy.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}