1. Introduction
At present, navigation methods mainly include inertial navigation, surface radio navigation, celestial navigation and satellite navigation. Each of these methods possess their own characteristics, scope of application and limitations, and cannot achieve completely autonomous or high precision autonomous navigation [
1,
2].
Strapdown inertial navigation system (SINS) has the advantages of simple structure and strong autonomy, providing continuous support of position, velocity and attitude information, under all-weather conditions. However, the navigation errors of SINS accumulate with time, thus the SINS cannot obtain high precision navigation information [
3,
4]. Radio navigation is limited by the coverage area of ground stations. The operation of this system is related to the radiowave propagation conditions, and vulnerable to the influence of artificial interference, which make radio navigation a non-autonomous navigation method [
5,
6,
7]. Satellite navigation is the combination of celestial navigation and radio navigation, with the advantages of convenient application and high precision. However, because the satellite navigation depends on artificial beacons, it is also vulnerable to the influence of artificial interference and cannot achieve fully autonomy [
8,
9,
10]. The advantages of celestial navigation are high accuracy of attitude measurement and strong ability to resist electromagnetic interference. Its disadvantages are the low rate of data updating, indirectly measured velocity and the limited navigation performance due to the number, distance and space environment of target celestial bodies [
1,
2,
11,
12].
The spectral redshift of natural light sources contains the velocity information of the celestial body relative to the moving object [
13]. Based on this principle, spectral redshift navigation (SRS) becomes a forward-looking navigation method, with the advantages of simple principle, high navigation accuracy, strong autonomy and good real-time performance. The SRS can provide a new technological method to improve the autonomy of navigation systems. However, when the carrier is in the process of attitude maneuvering, the navigation accuracy will be worse and the navigation result may even be divergent due to the insufficient or interrupted observation information. Therefore, it is necessary to combine SRS with some other navigation method to constitute an integrated navigation system, thus compensating for the defects of SRS alone.
Nonlinear filtering algorithms are commonly used in autonomous navigation systems, however, these filtering algorithms have their own defects. For example, when the practical probability function has multiple peak values, the extended Kalman filtering (EKF) may be divergent because the nonlinear system equations arelinearized by the Taylor expansion and the linearized states are required to obey the Gaussian distribution [
14,
15,
16,
17]. The unscented Kalman filtering (UKF) method also demands the states obey the Gaussian distribution, which is not applicable for nonlinear systems with non-Gaussian distribution [
18,
19]. The particle filtering (PF) method is prone to particle degeneracy phenomena, and the accuracy depends heavily on the choice of importance sampling density and resampling scheme [
20,
21,
22,
23,
24]. By robustly estimating the covariance matrix of observation noise and adaptively adjusting the covariance matrix of the state noise by augmenting the adaptive factor into the covariance matrix of the state prediction, the robust adaptive filtering can deal with observation and model noises to obtain reliable filtering results, especially in the presence of abnormal observations [
25,
26,
27,
28]. Therefore, combined with robust adaptive filtering and particle filtering, a new nonlinear filtering algorithm for autonomous navigation system is designed to improve the accuracy and reliability of the autonomous navigation system.
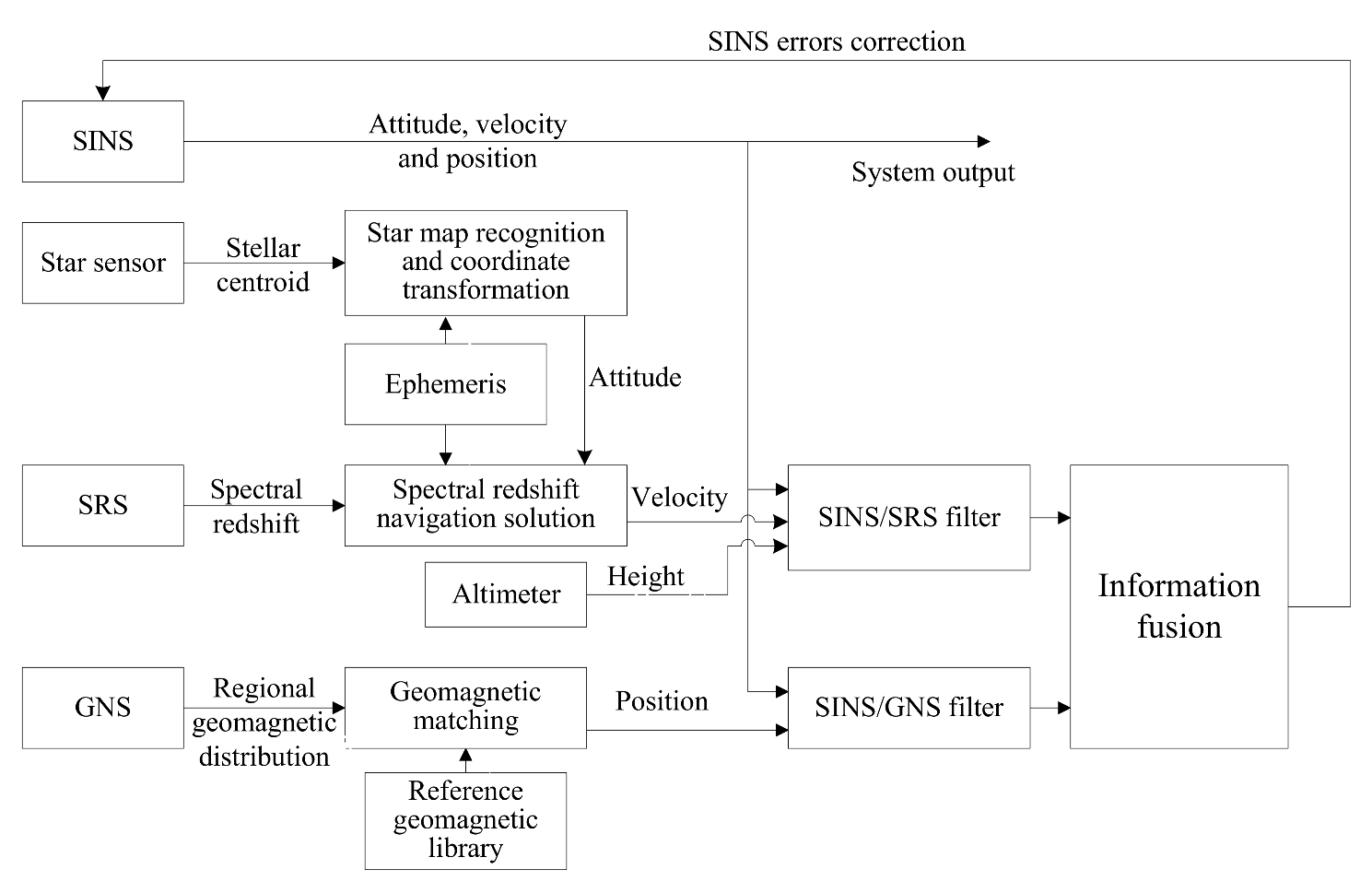
Based on the principle of velocity measurement by using spectral redshift of celestial bodies in space, and combined with the advantages of Geomagnetic Navigation System (GNS), this paper proposes a new SINS/SRS/GNS autonomous integrated navigation system. The principle, scheme and mathematical model of this autonomous integrated navigation system are established, and a high-precision nonlinear filtering algorithm for the autonomous navigation system is proposed. Subsequently, all of the models and algorithms are verified by experiments.
2. The Principle of the Spectral Redshift Navigation
We assume the carrier can receive optical signals from celestial bodies during the space flight process. According to the Doppler effect principle, the spectral frequency of carrier received signals is not equal to the spectral frequency of the celestial bodies, and the variation of spectral frequency is related to the motion state of the carrier relative to the celestial bodies. Therefore, the relative velocity of the carrier can be obtained by measuring the redshift of the spectral frequency. According to the space vector relation, if the number of observed celestial bodies (which are non-collinear) is greater than three, the velocity vector of the carrier in inertial coordinate system can be determined by integrating the ephemeris of the celestial bodies and the inertial attitude information, and then the position vector can be obtained by integration.
The total redshift measured by spectral sensors is actually the sum of gravitational redshift, cosmological redshift and Doppler redshift. The gravitational redshift and cosmological redshift can be obtained by astronomical ephemeris, and both of them need to be removed. Only the Doppler redshift can be used to navigation calculation. We define the Doppler redshift as:
where
represents Doppler redshift,
is the original wavelength of the spectral line,
is the observed wavelength,
is the original frequency of the spectral line,
f is the observed frequency.
Accordingly, the redshift equation is:
where
is the velocity of the carrier relative to the light source,
is the angle between the wave vector of the light source pointing to the carrier and the velocity
in the inertial coordinate system,
represents radial velocity,
is the light speed in vacuum.
In three-dimensional celestial navigation, Equation (2) is transformed and applied to the first reference celestial body, and we can obtain:
where
is the radial velocity of the carrier relative to the first reference celestial body (the light source),
is the redshift value of the first reference celestial body,
is the velocity vector of the carrier in the inertial coordinate system,
is the velocity vector of the first reference celestial body in the inertial coordinate system. The redshift value can be obtained by spectral preprocessing, spectral line feature extraction and spectral line matching.
Select three reference celestial bodies and the equations are listed as follows:
From the geometric relationship of the celestial bodies, the relationship between
and
,
,
satisfies the following relationship:
where
,
and
are the velocity vectors of the celestial bodies in the inertial system determined by the ephemeris, respectively,
,
and
are the unit vectors of the position vectors of the celestial bodies pointing to the carrier in the inertial coordinate system, which can be measured by the sun sensor or the star sensor.
The state estimation equations for the velocity vector and the position vector are established as:
After the initial value is given, the velocity vector of the carrier in the inertial coordinate system can be obtained by solving (6), and then the position vector can be obtained by integration.
5. Simulation Experiment and Result Analysis
In this section, we compare the navigation errors of the proposed SINS/SRS/GNS autonomous navigation system with the SINS, SINS/SRS subsystem and SINS/GNS subsystem, respectively, by using the proposed RACDPF algorithm, to verify the performance of our SINS/SRS/GNS autonomous navigation system. Furthermore, under the same conditions, the simulation results of UKF, PF, and the proposed RACDPF are also compared to verify the performance of the proposed filtering algorithm, including comparisons of the accuracy, real-time and robustness of the filtering algorithms.
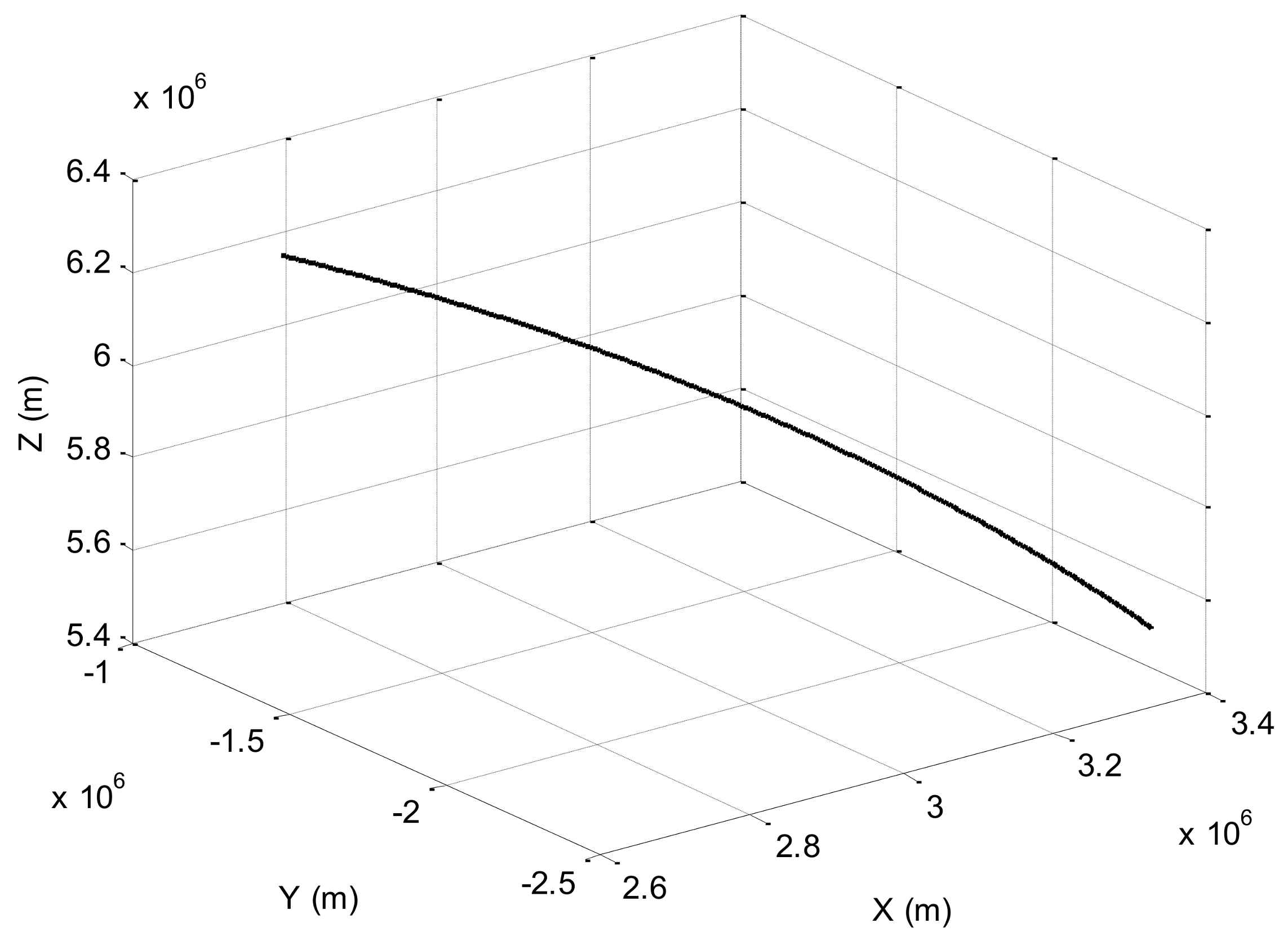
In the experiment, the J2000 geocentric equatorial inertial coordinate system is selected for the coordinate system. Assume that the experimental data are from a flight of a spacecraft. The orbit parameters of the spacecraft are described as Semimajor axis 6947.035365 km, Eccentricity 0.001088, Orbit inclination 22.998°, Right ascension of ascending node 334.87°, Argument of perigee 341.452°, True anomaly 231.43°. We selected a part of the flight, which lasted for 1500 s, and the initial position is (3,330,812, −2,488,259, 5,565,647). The flight trajectory is shown in
Figure 3.
In the simulation process, the initial alignment error of SINS is 0, the initial velocity error is 1 m/s, the initial position error is 10 m, and the initial attitude error is
. The parameter for adaptive factor calculation is
[
25,
27]. The number of particles is
, the simulation time is 1500 s, and the filtering period is 1 s. The parameters of the sensors used in the simulation are shown in
Table 1.
(1) Simulation verification of the subsystems
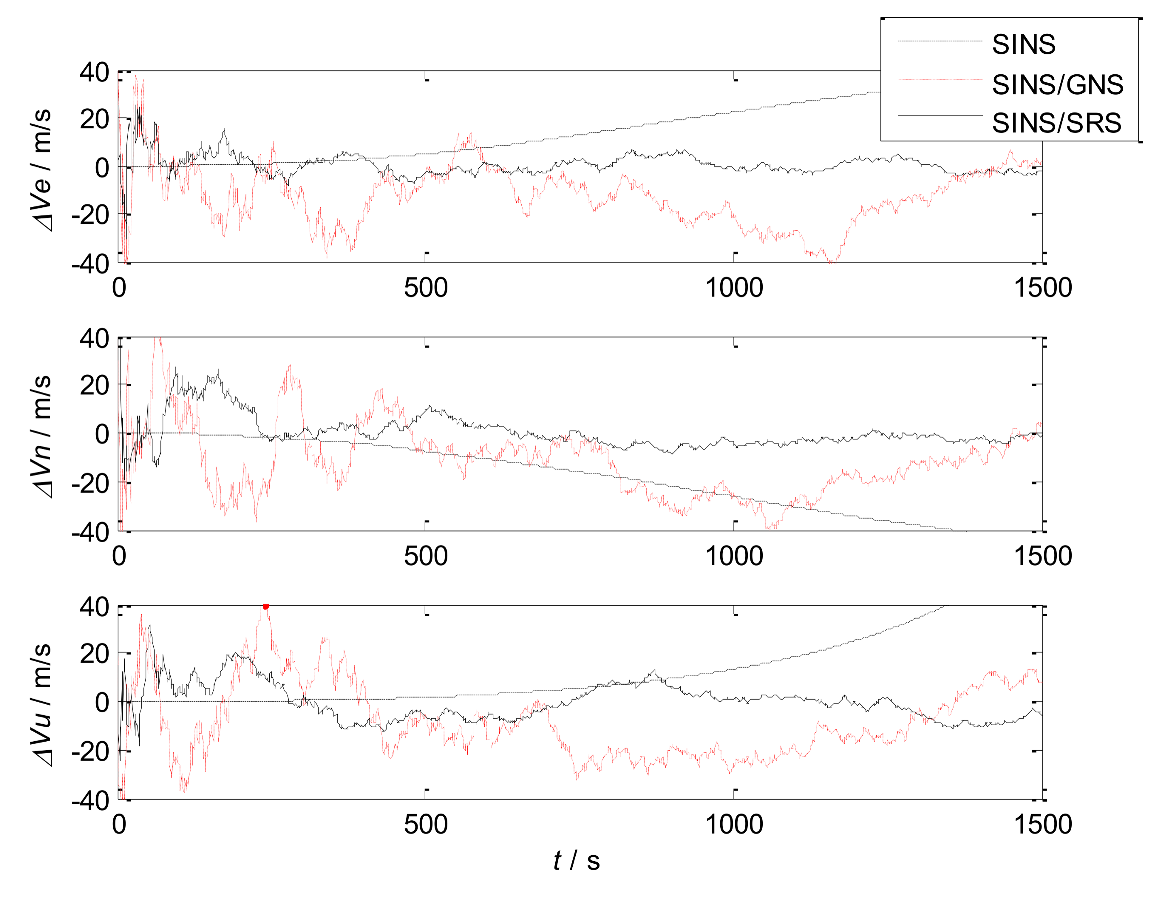
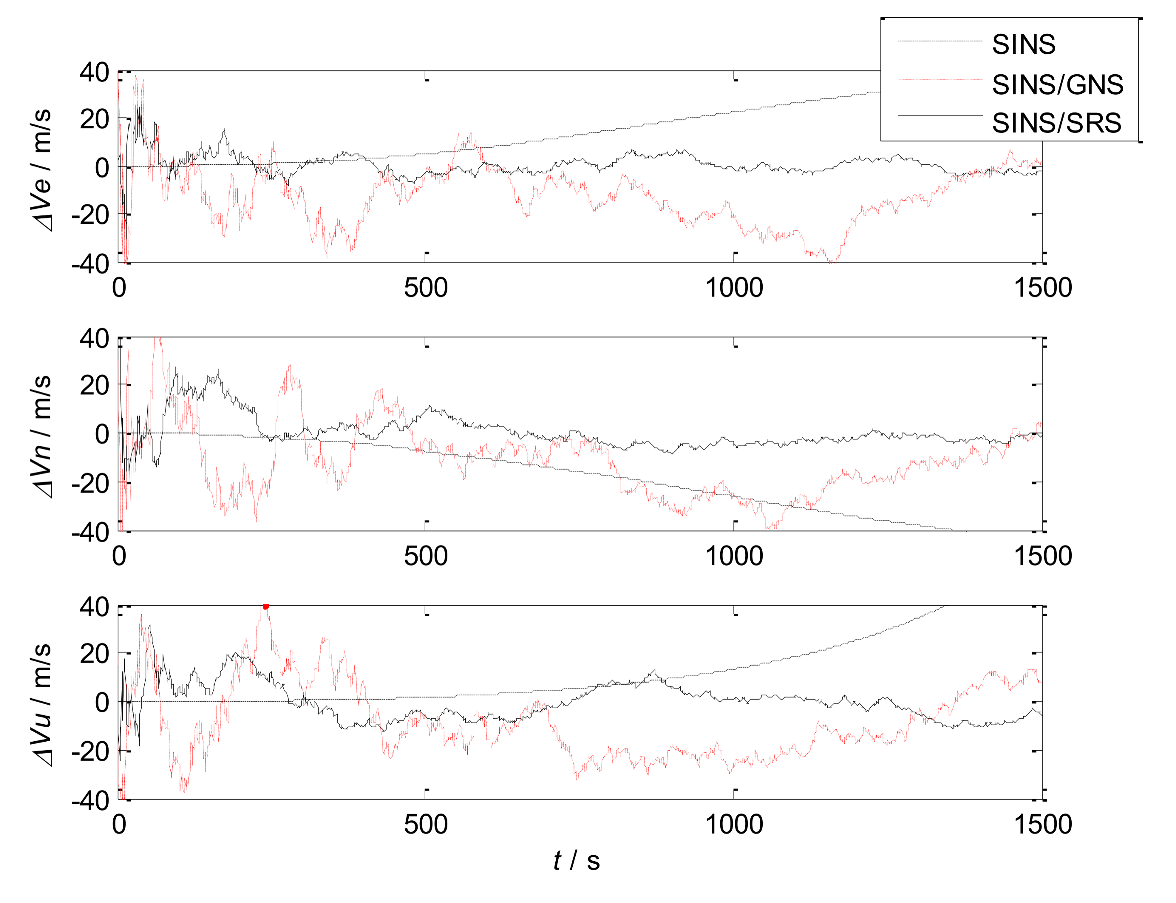
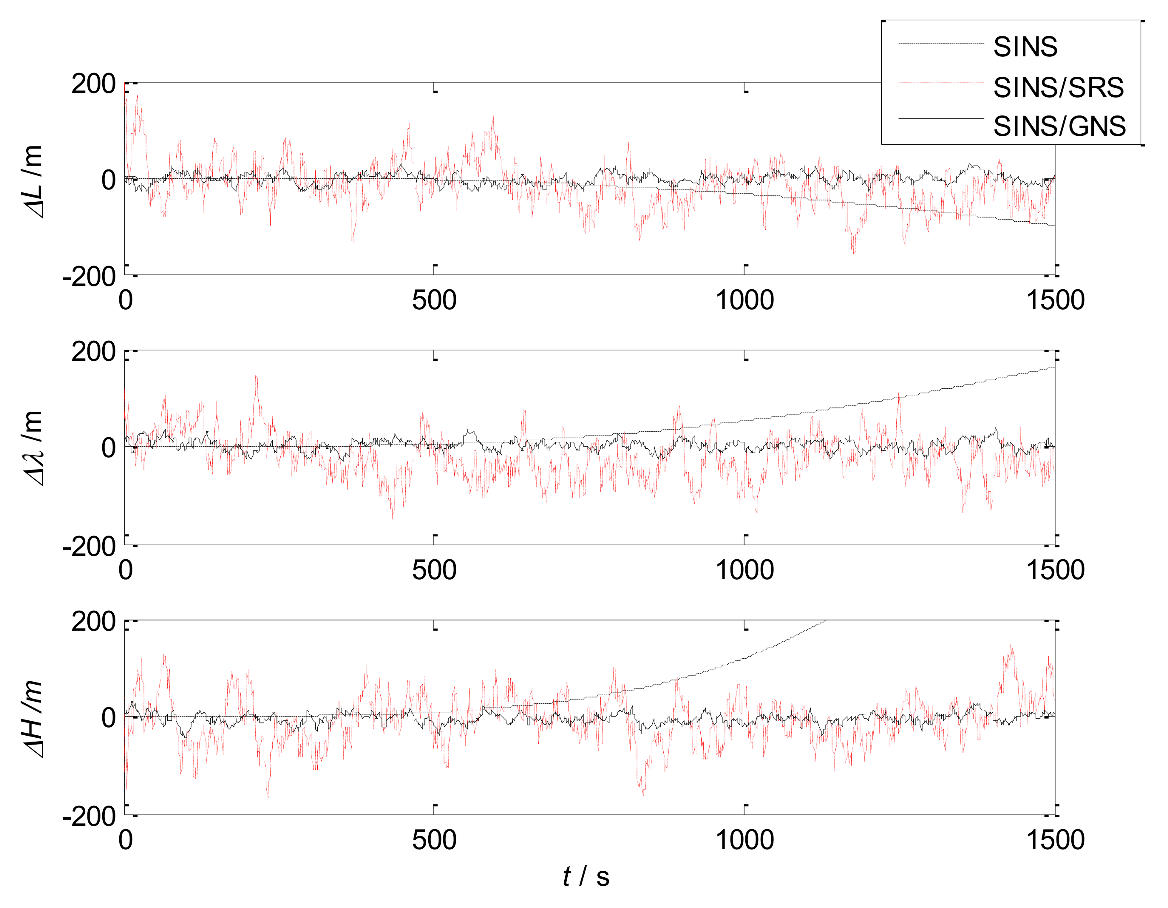
The simulation of SINS, SINS/SRS subsystem and SINS/GNS subsystem are carried out respectively, and the results are compared to verify the performance of the subsystems.
The simulation results are shown in
Figure 4 and
Figure 5. The error statistics of the subsystems are shown in
Table 2.
It can be seen that the velocity error and position error of SINS accumulate with time and diverge, which cannot meet the high accuracy requirement of navigation system. Therefore, other navigation methods need to be used to correct SINS.
For the SINS/GNS subsystem, GNS can obtain high position accuracy, so it is mainly used to correct the position error of SINS. But the velocity accuracy is poor, and the correction effect is not obvious. For the SINS/SRS subsystem, SRS can obtain good velocity accuracy, so the velocity accuracy after correction is high, but the position accuracy is poor. Therefore, single SINS/GNS or SINS/SRS subsystem cannot meet the needs of autonomous navigation and positioning. We need to combine both of them to design the SINS/SRS/GNS autonomous integrated navigation system to improve the navigation accuracy.
(2) Simulation verification of the autonomous integrated navigation system
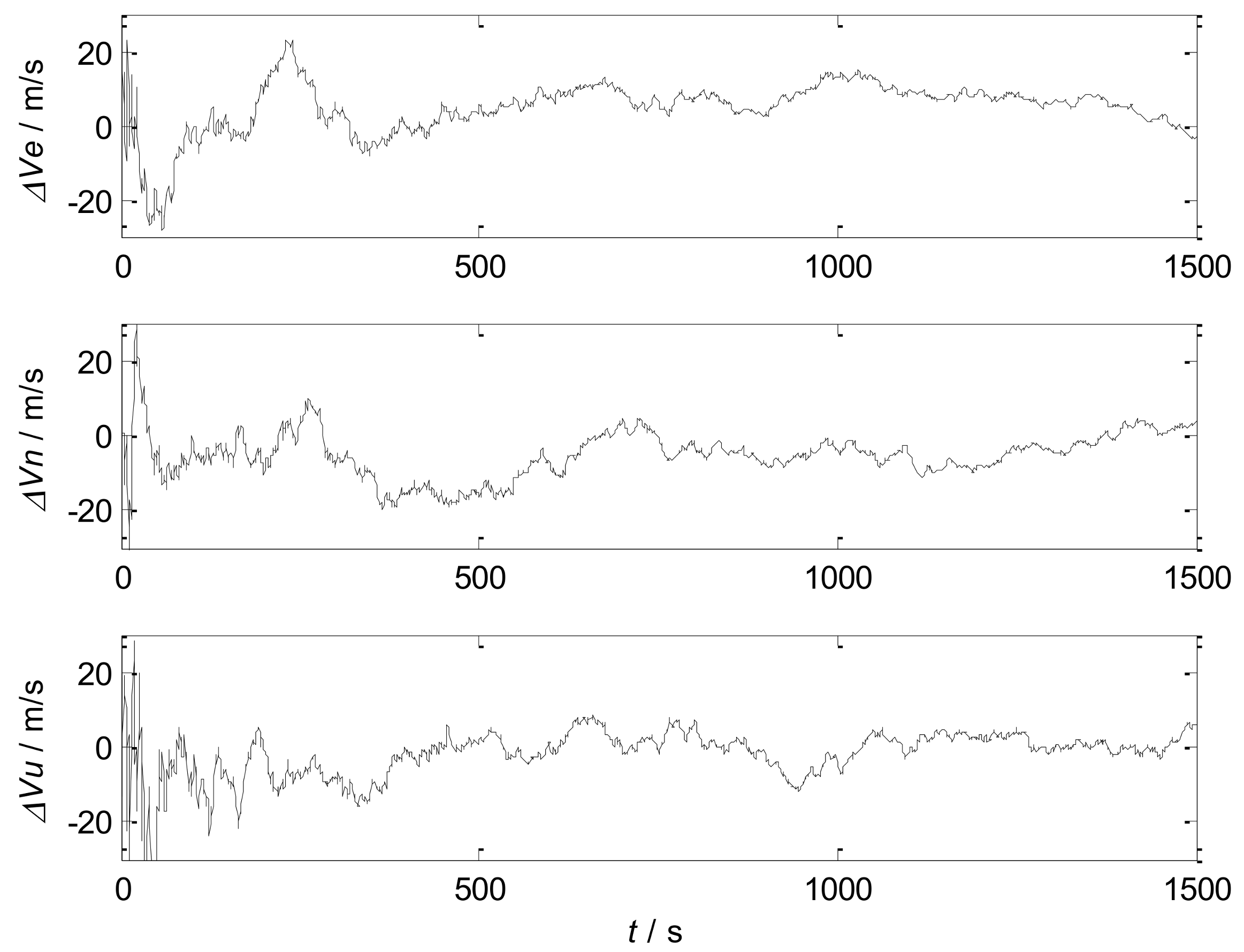
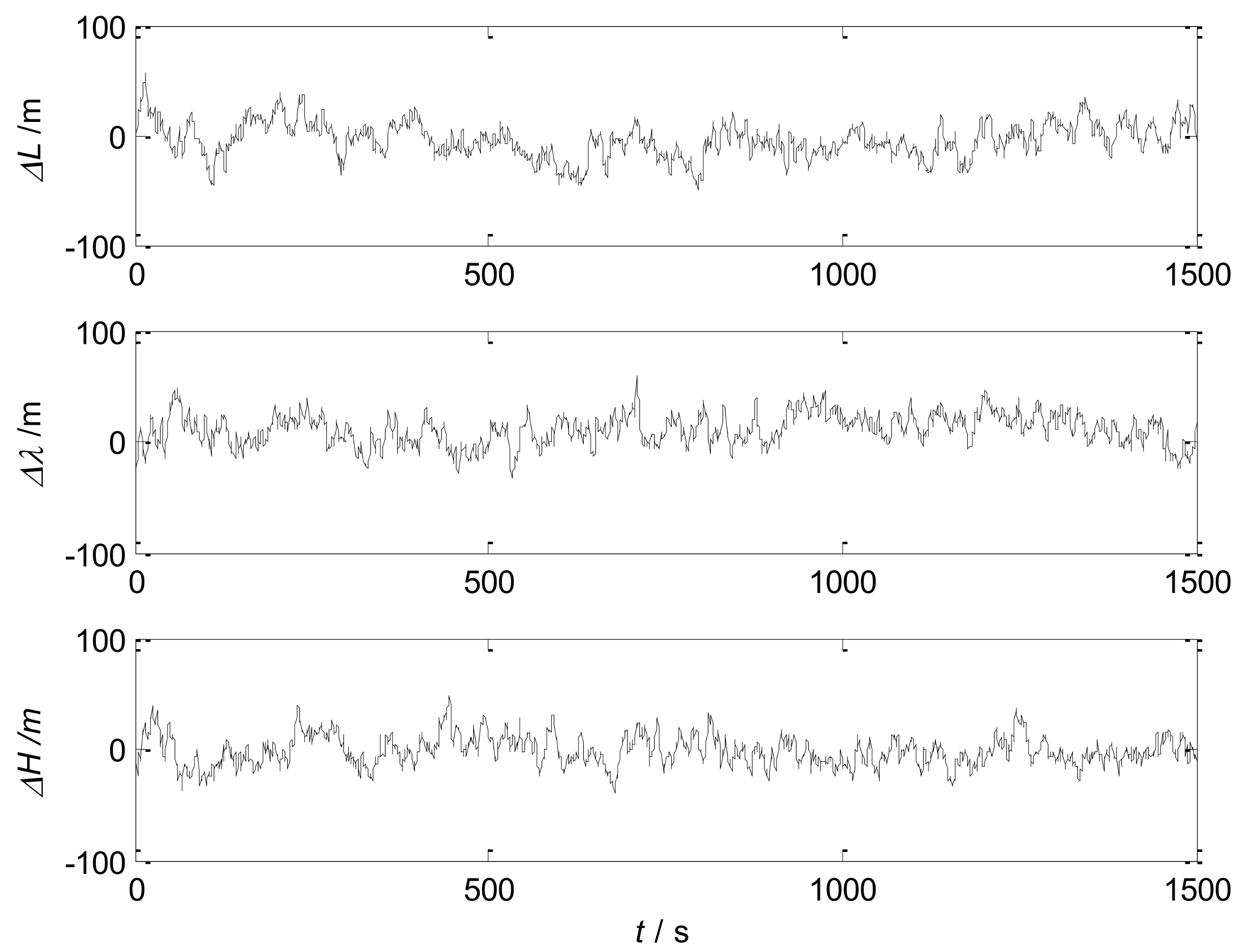
The simulation of SINS/SRS/GNS autonomous integrated navigation system is carried out, and the results are shown in
Figure 6 and
Figure 7.
Table 3 shows the error statistics of the autonomous integrated navigation system.
The simulation results show that the designed SINS/SRS/GNS autonomous integrated navigation system adopts information fusion technology to combine SINS with SRS and GNS, and complements the three systems in performance. Therefore, the SINS/SRS/GNS system overcomes the defects of single navigation system, and exhibits a good performance. Therefore, the designed SINS/SRS/GNS system effectively improve the accuracy and reliability of autonomous navigation systems.
(3) Performance verification of filtering algorithm
Based on the above performance comparison and analysis, UKF and PF are also applied to the SINS/SRS/GNS autonomous integrated navigation system for filtering respectively, in order to verify the performance of the proposed RACDPF algorithm and autonomous integrated navigation system. We will compare and analyze the accuracy, real-time and robustness of the nonlinear filtering algorithms (UKF, PF and RACDPF) respectively, so as to evaluate the performance of the filtering algorithms from more aspects.
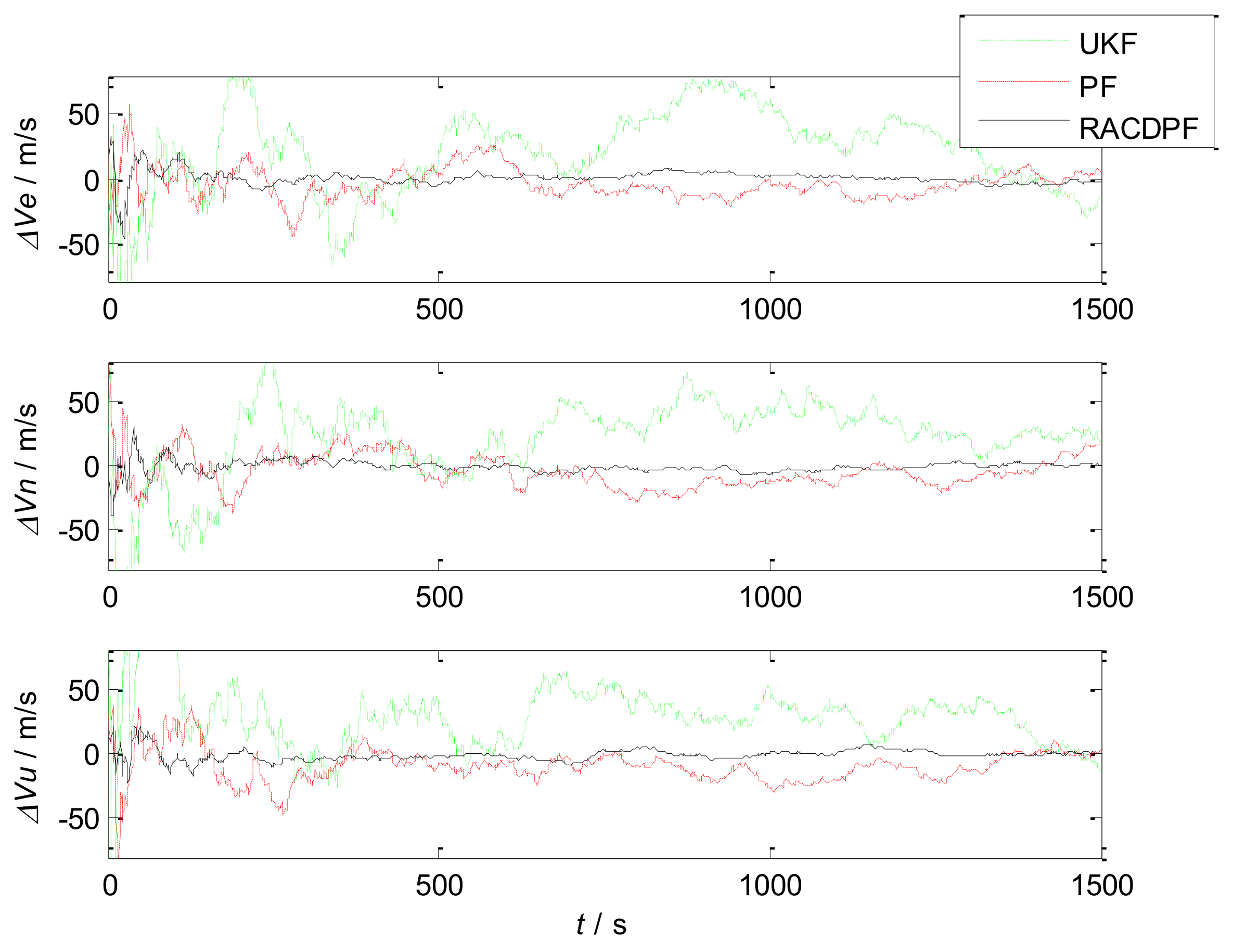
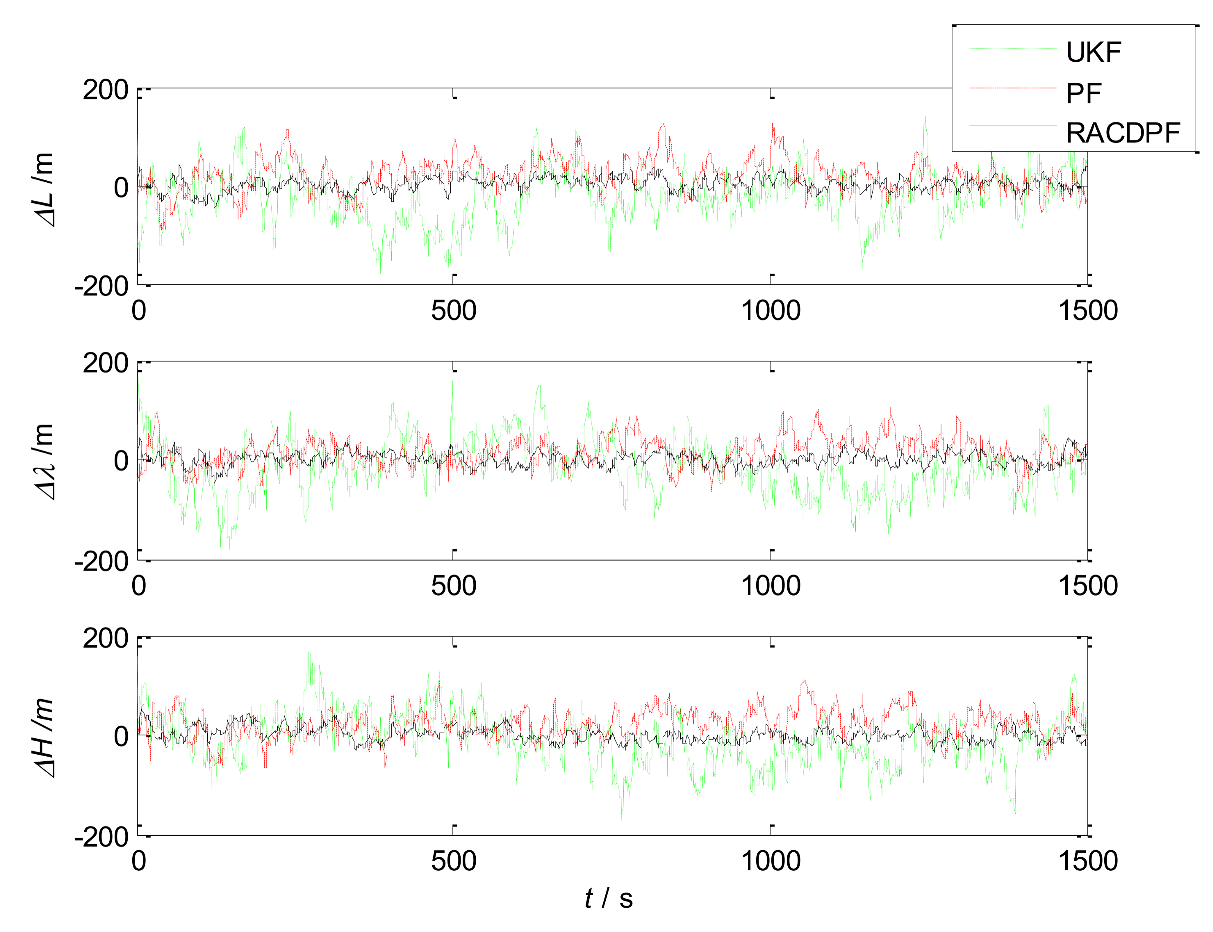
A. Accuracy Comparison of Filtering Algorithms
We define the filtering accuracy as the difference between the estimated state value and the reference state value. The accuracy of the nonlinear filtering algorithms is compared and analyzed by the following steps:
- (1)
Use UKF, PF and RACDPF for filtering and then calculate the velocity error and position error of each filtering algorithm. The results are shown in
Figure 8 and
Figure 9. In order to facilitate statistical results, the position error can be defined as:
the velocity error can be defined as:
Then, the error statistics of the three filtering algorithms can be obtained, as shown in
Table 4.
- (2)
Repeat Step (1) in the case of particle number
and
respectively, and the results are shown in
Table 5 and
Table 6.
It can be seen that the accuracy of UKF is the worst. PF inevitably displays a particle degradation phenomenon after several iterative computations, therefore the filtering accuracy is limited. RACDPF uses the robust adaptive factor to control the kinematic model information and observation model information, for suppressing the influence of abnormal interference, thus the filtering accuracy is better than that of UKF and PF. From
Table 4,
Table 5 and
Table 6, it can be seen that the number of particles can obviously affect the accuracy of PF and RACDPF because PF uses samples to approximate the a priori information and a posteriori information, and the more the number of samples, the closer to the true distribution.
B. Real-Time Comparison of Filtering Algorithms
The factors that affect the real-time performance of the filtering algorithm include algorithm complexity, filtering condition and hardware processing ability. The algorithm complexity is the main parameter to describe the degree of difficulty in algorithm implementation. In this section, The real-time performance of UKF, PF and RACDPF is researched under the same hardware platform, software platform and initial conditions.
The equivalent computational complexity and running time of each filtering algorithm are are shown in
Table 7, where
is the number of particles,
is the state dimension,
represents the computational complexity of each recurrence calculation for the algorithms.
It can be seen that PF and its improved algorithms need to sample a large number of particles, allocate weights and resample, which is complex and computationally burdensome, therefore the algorithm running time is obviously higher than that of UKF. Therefore, the number of particles should be determined according to the specific application requirements.
C. Robustness Comparison of Filtering Algorithms
For a given filtering algorithm, its robustness is manifested in the performance that when the system parameters or the external environment change, the filtering algorithm can still maintain certain filtering accuracy.
In order to verify the robustness of the filtering algorithms (UKF, PF and RACDPF), the errors of variance 1 m
2/s
2 and 4 m
2 are added to the velocity and position observations of the experimental data, respectively. Then, the position RMSEs of the two sets of experimental data are calculated by each filtering algorithm, respectively. The number of particles
M = 200, and the other conditions are consistent with the previous. The results are shown in
Table 8.
The effect of abnormal disturbances on the UKF and PF is more significant than RACDPF, this is because UKF and PF cannot deal with abnormal interferences. However, RACDPF can control the kinematic model information and the observation model information by selecting the appropriate robust adaptive factor to suppress the influence of abnormal interferences. Therefore, the RACDPF is the least affected.
The effect of abnormal disturbances on the UKF and PF is more significant than RACDPF, this is because UKF and PF cannot deal with abnormal interferences. However, RACDPF can control the kinematic model information and the observation model information by selecting the appropriate robust adaptive factor to suppress the influence of abnormal interferences. Therefore, the RACDPF is the least affected.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}