Three-Dimensional Registration for Handheld Profiling Systems Based on Multiple Shot Structured Light


Abstract
:1. Introduction
2. Materials and Methods
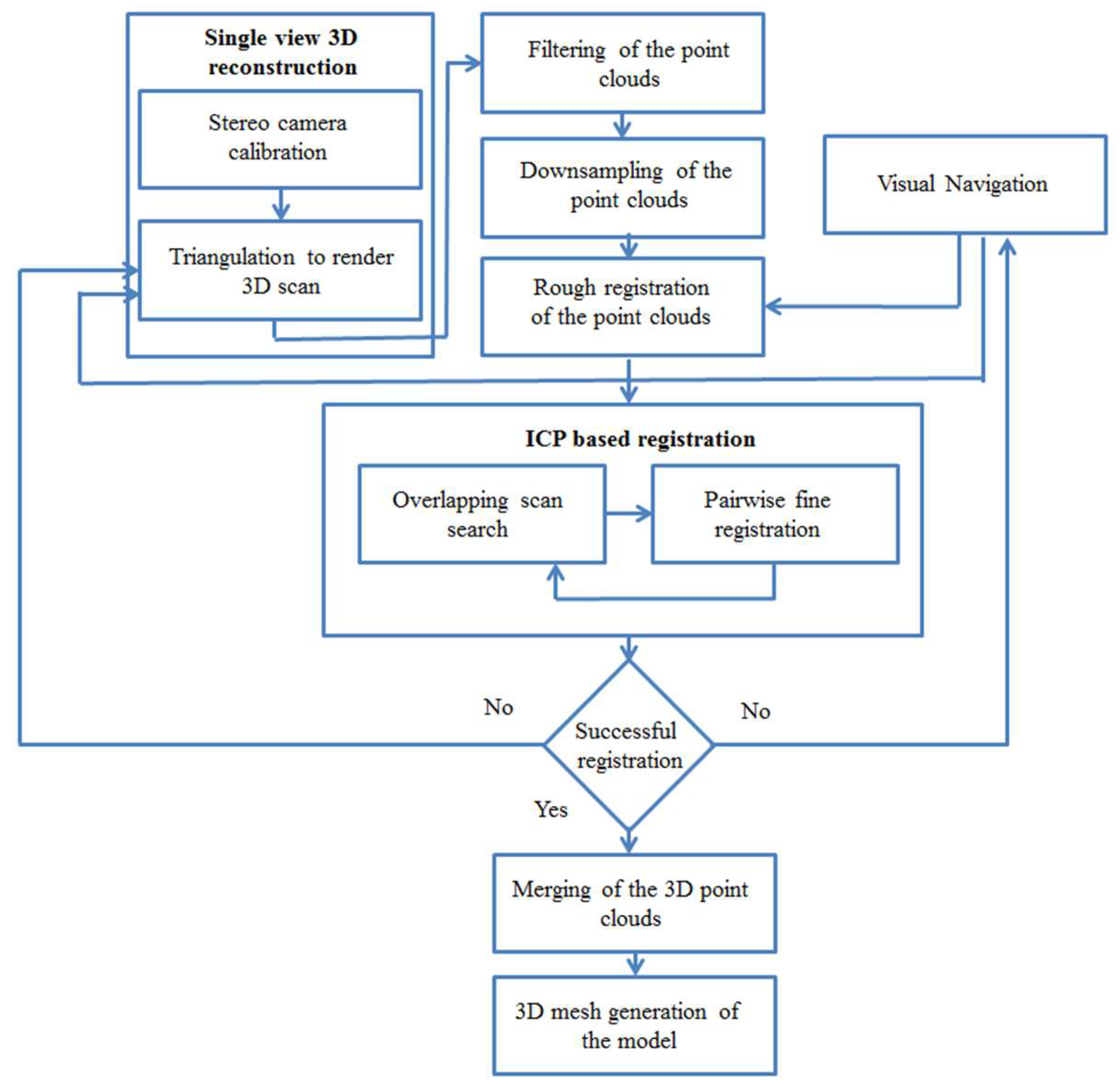
2.1. Proposed Approach
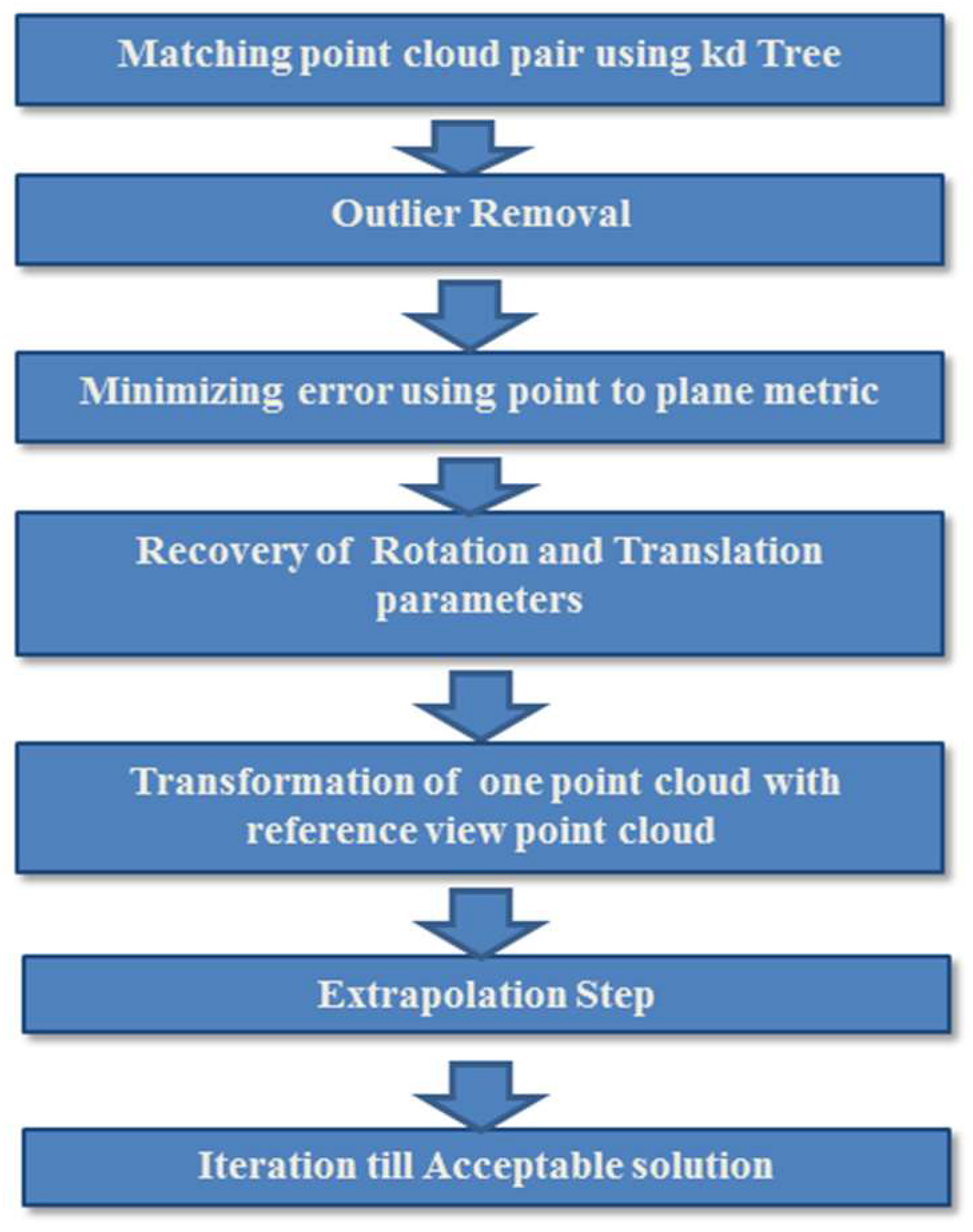
2.2. Two View 3D Reconstruction
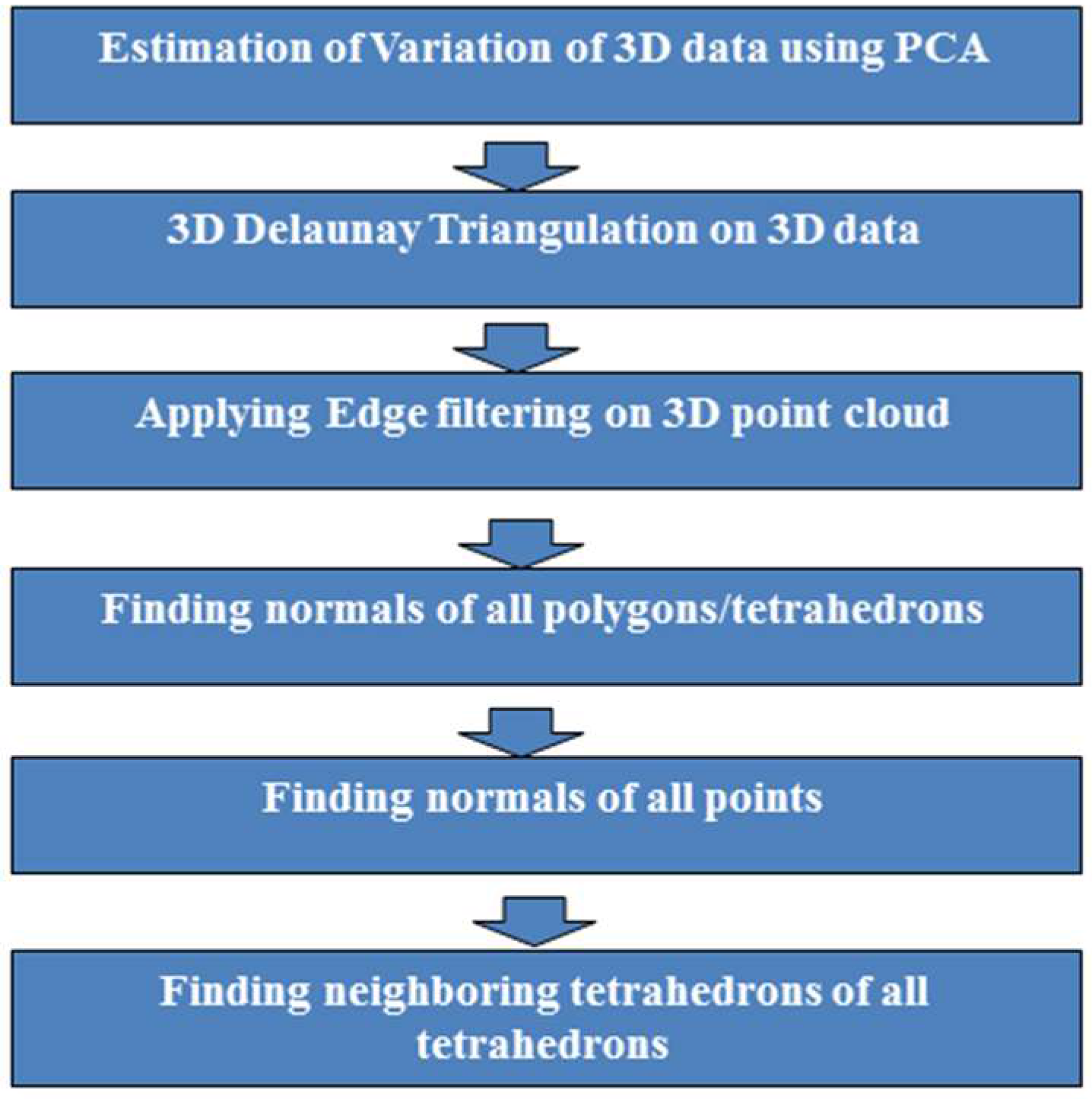
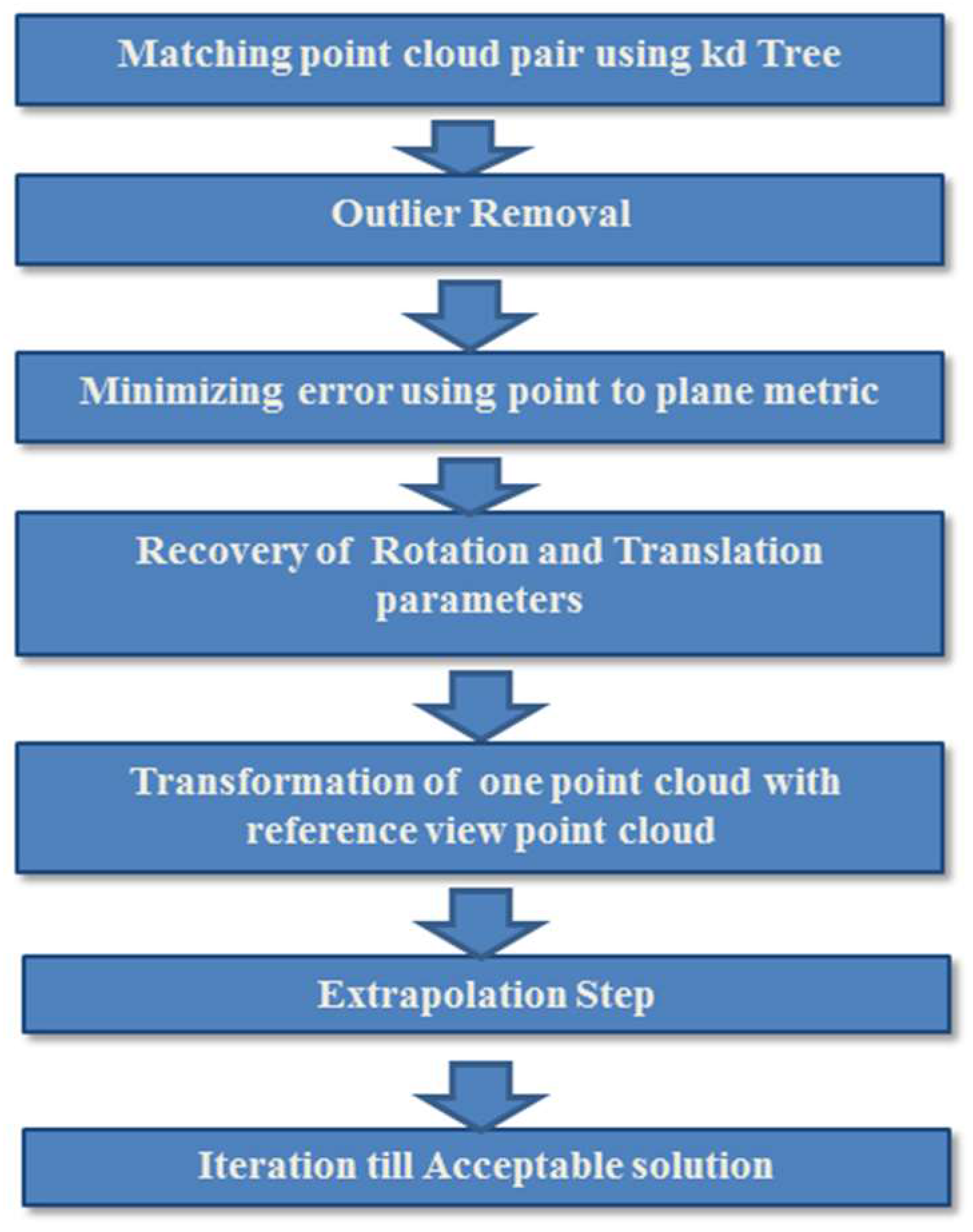
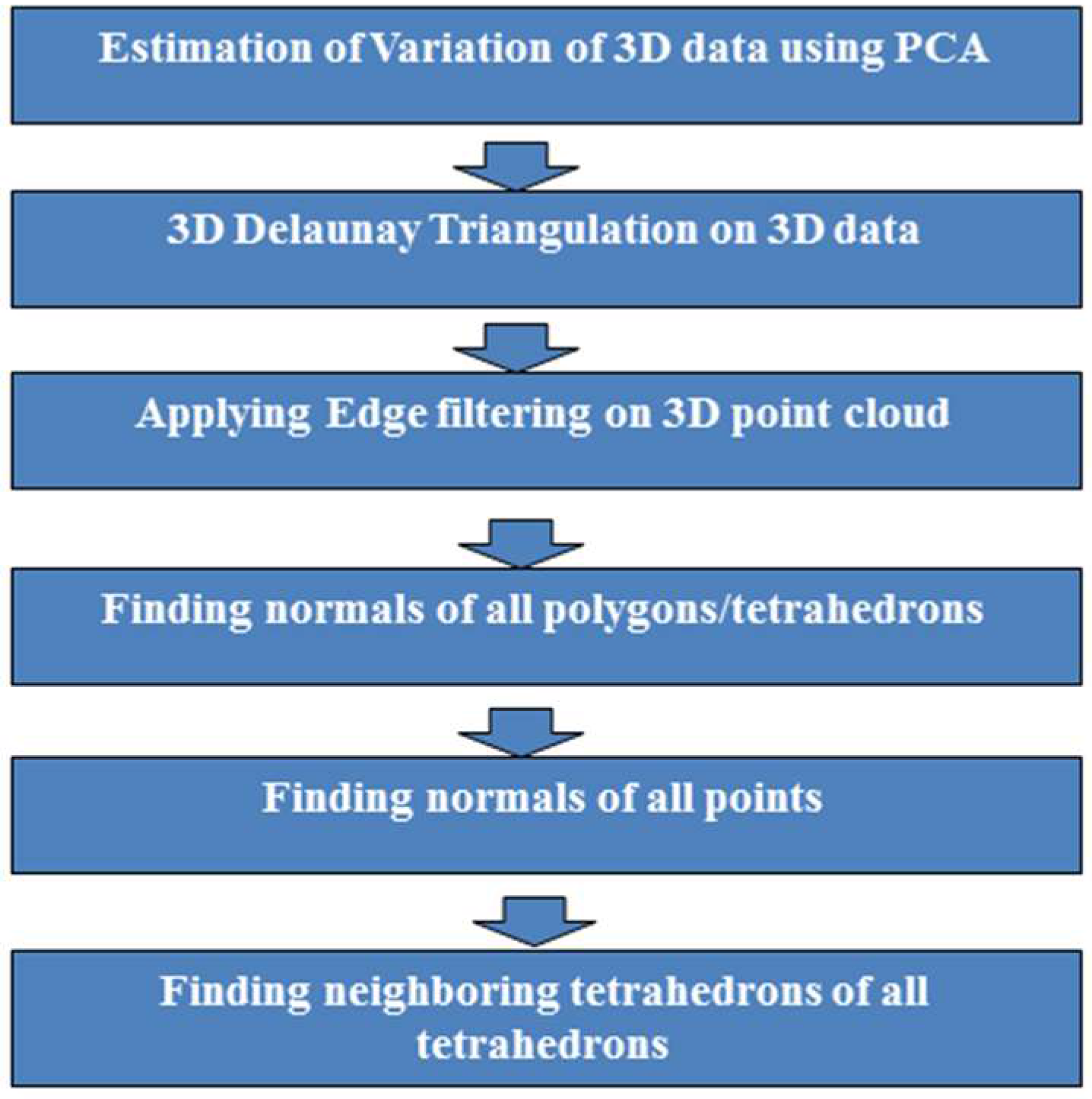
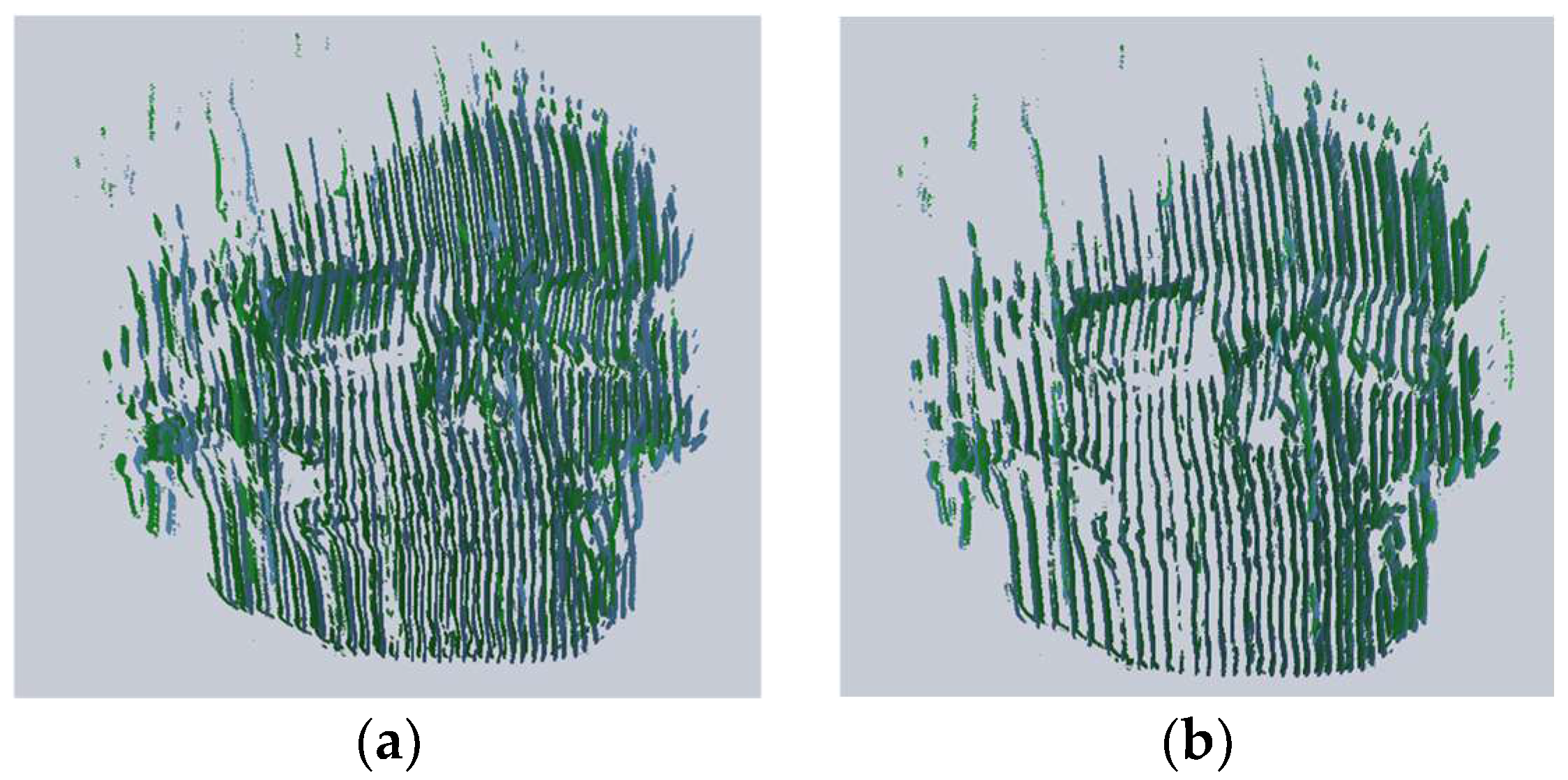
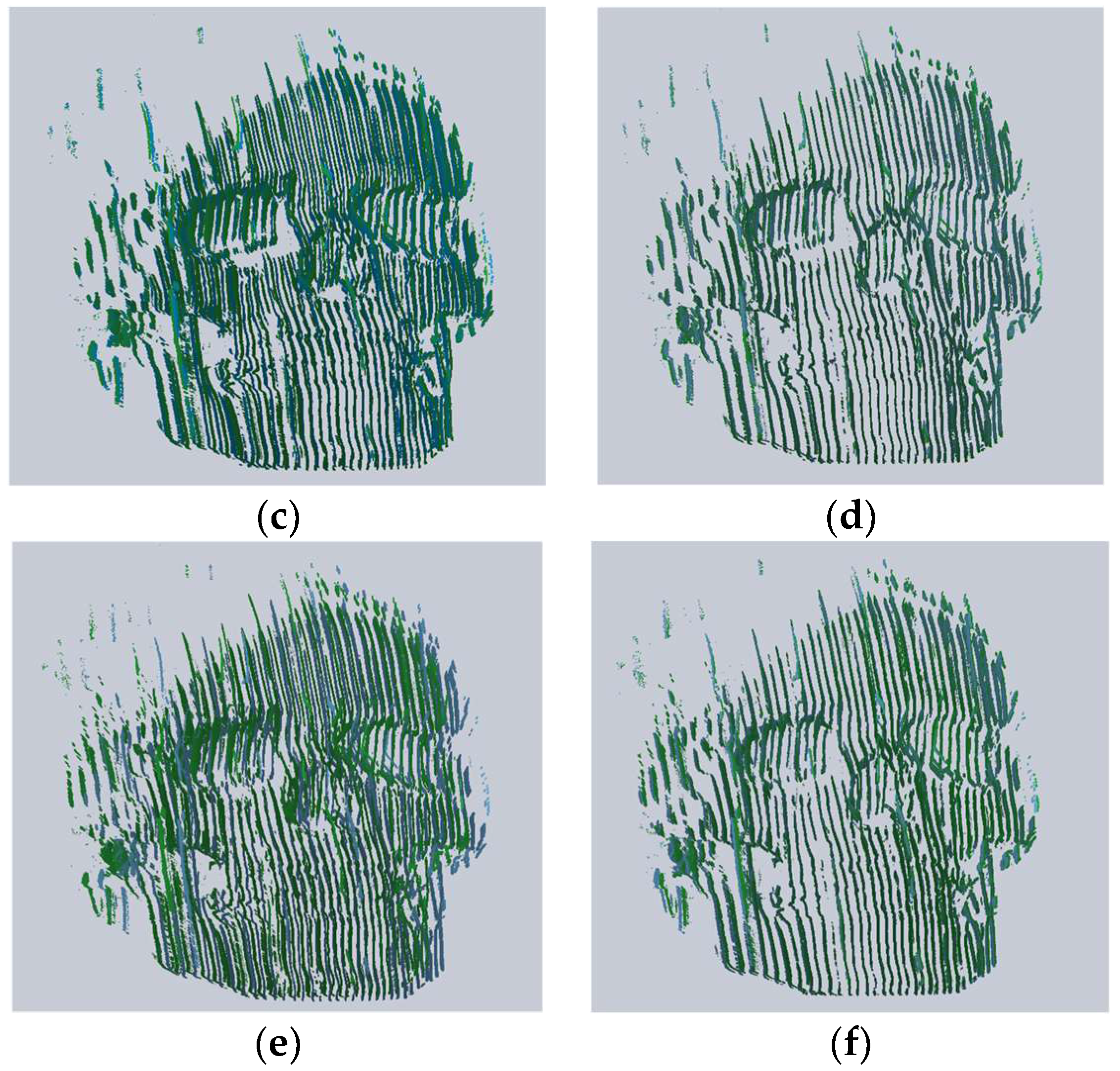
2.3. Multiview 3D Reconstruction
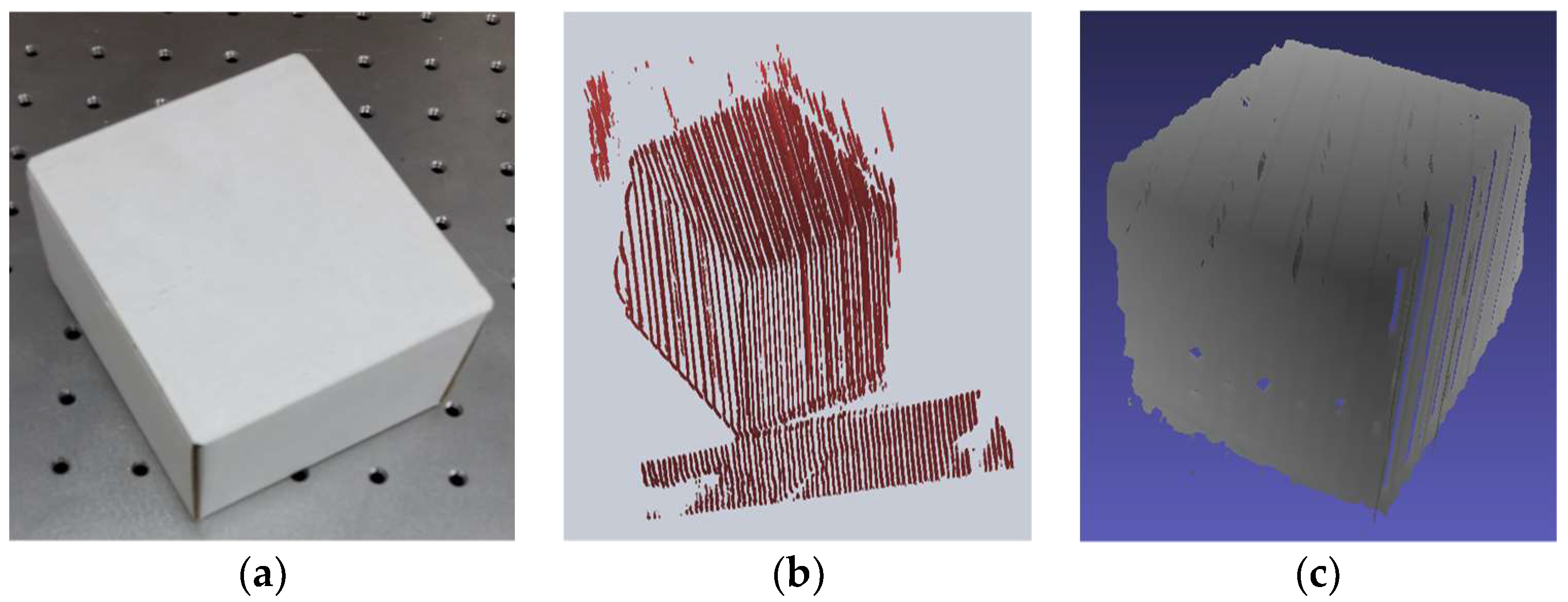
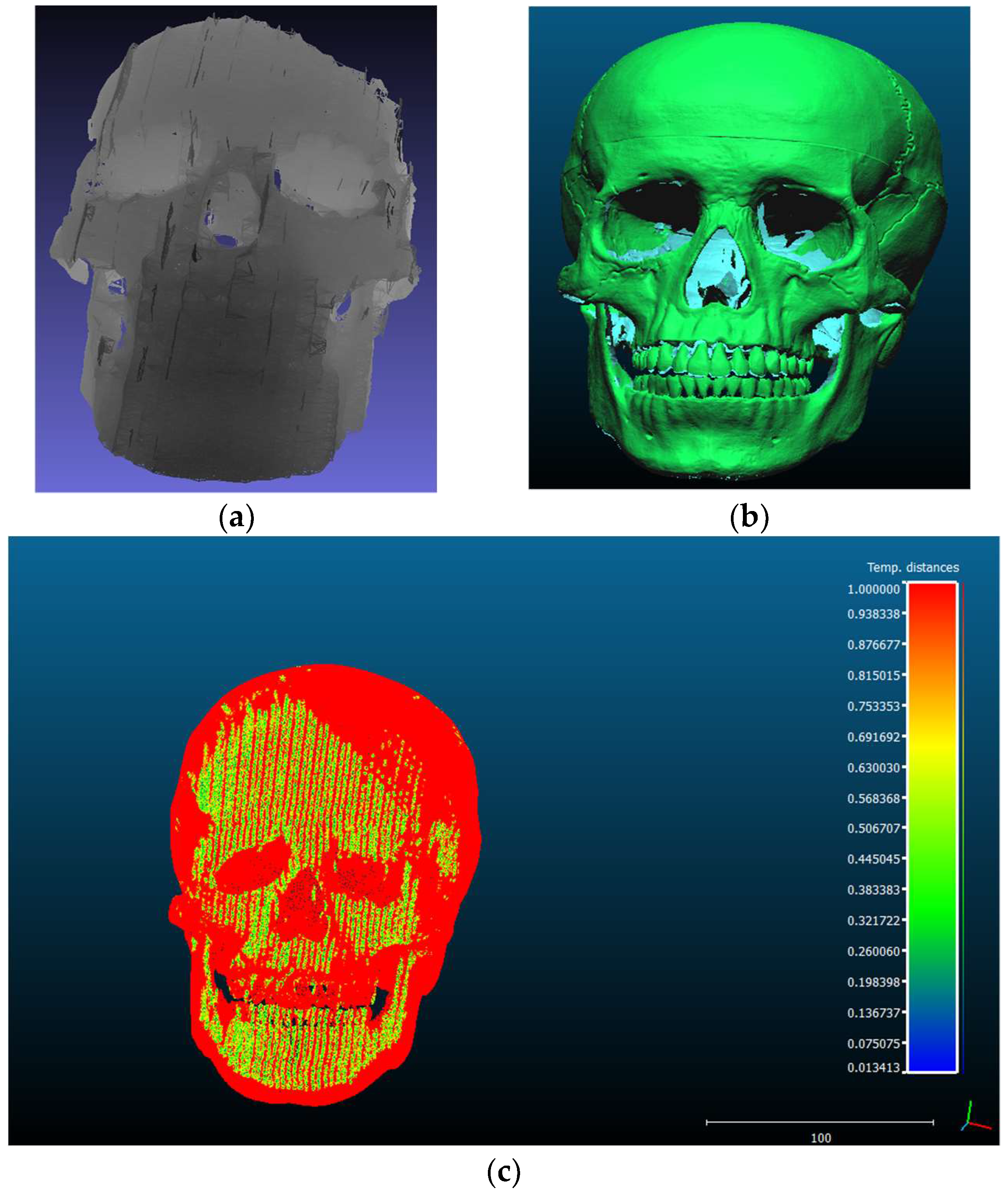
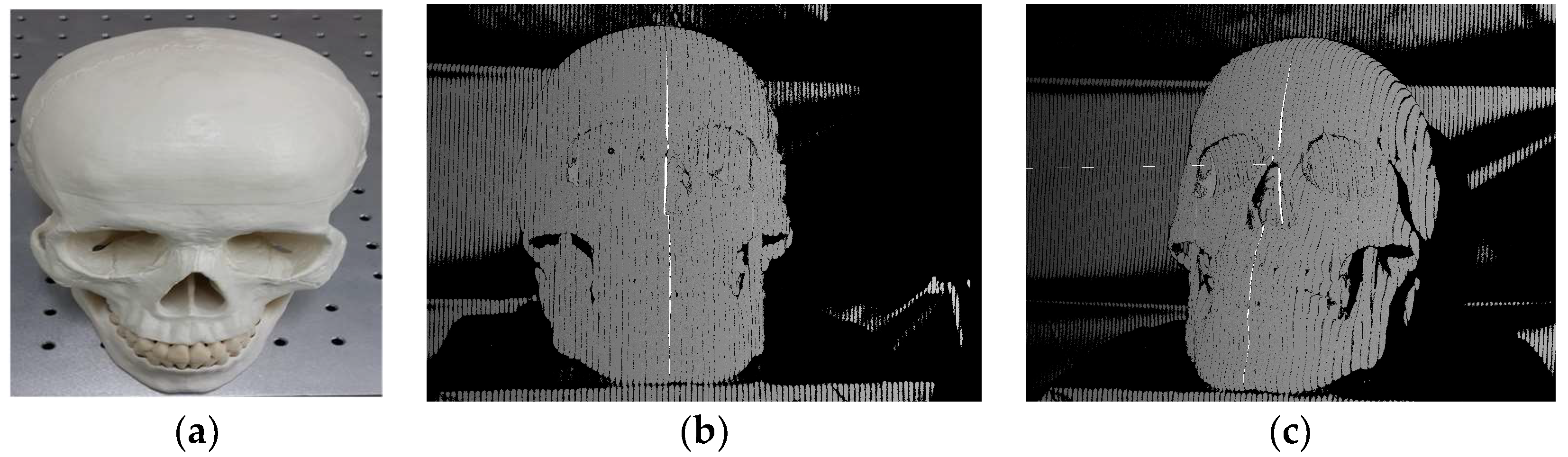
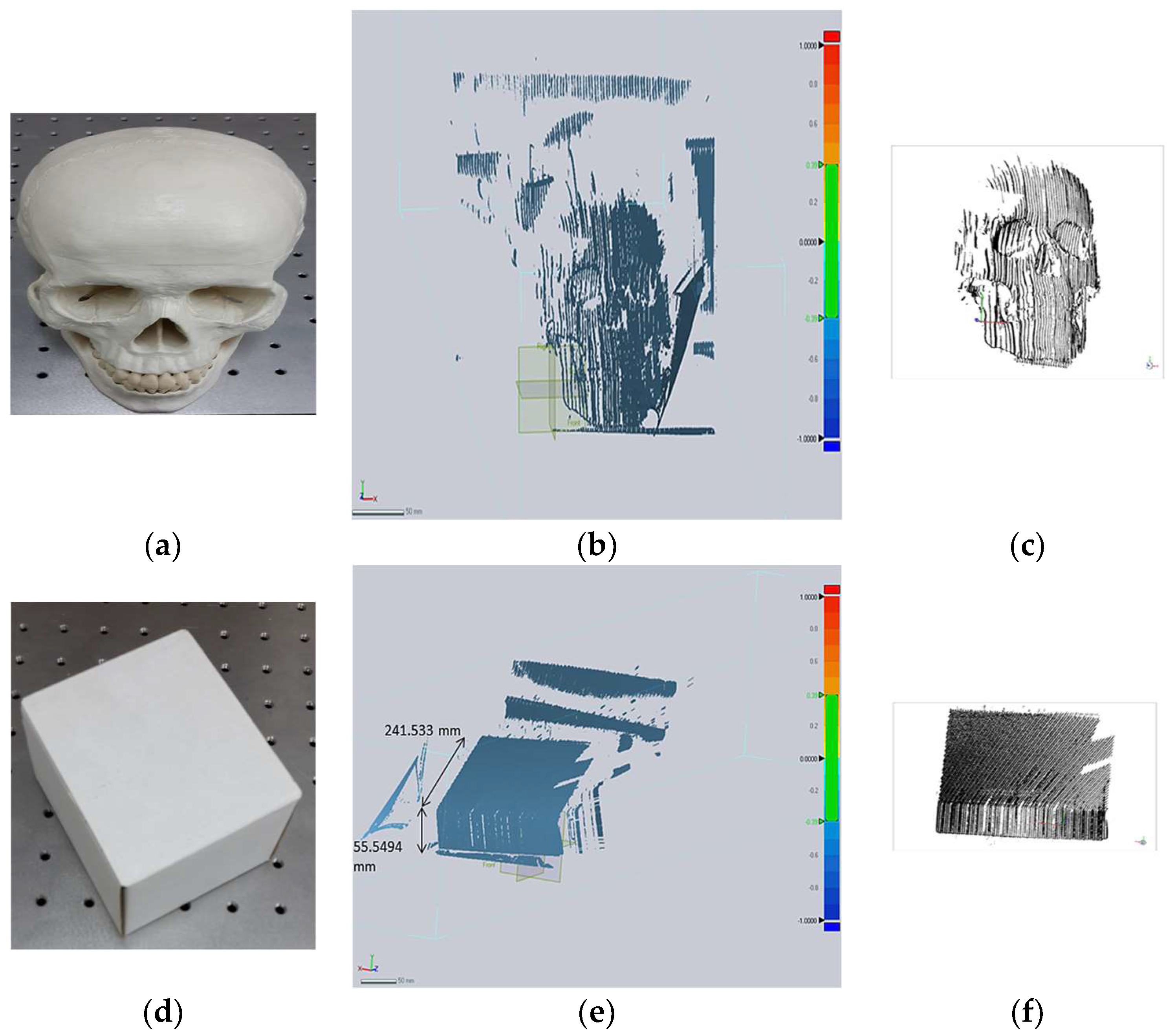
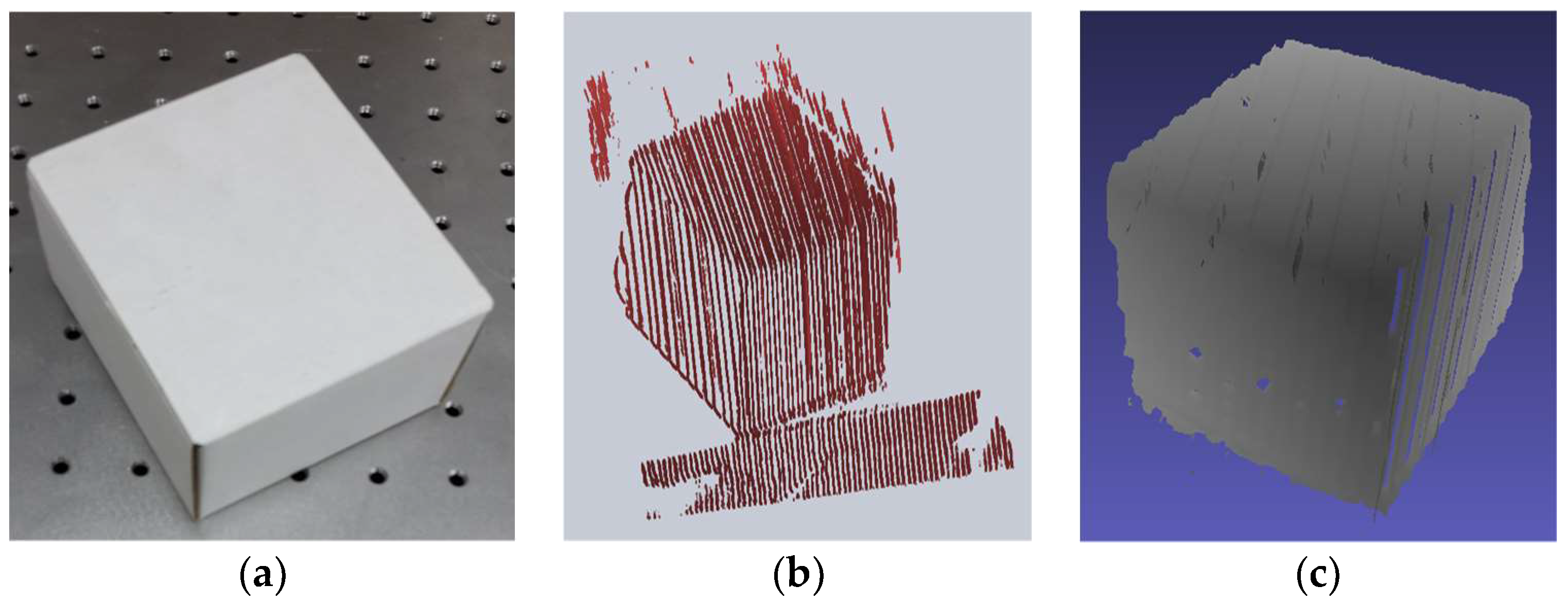
3. Experiments and Results
- Scan size: 60–500 mm
- Resolution/Precision: Up to 0.05% of scan size (up to 0.05 mm)
- Scanning time: One single scan within a few seconds
- Mesh density: Up to 2,300,000 vertices per scan
- Export formats: OBJ, STL, PLY
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ram, V.; Zhou, Z.; Kurillo, G.; Lobaton, E.; Bajcsy, R.; Nahrstedt, K. Real-time stereo-vision system for 3D teleimmersive collaboration. In Proceedings of the 2010 IEEE International Conference on Multimedia and Expo (ICME), Suntec City, Singapore, 19–23 July 2010; pp. 1208–1213. [Google Scholar]
- Stavros, H.; Ttofis, C.; Georghiades, A.S.; Theocharides, T. Towards hardware stereoscopic 3D reconstruction: A real-time FPGA computation of the disparity map. In Proceedings of the Conference on Design, Automation and Test in Europe, European Design and Automation Association, Dresden, Germany, 8–12 March 2010; pp. 1743–1748. [Google Scholar]
- Aissaoui, A.; Martinet, J.; Djeraba, C. Rapid and accurate face depth estimation in passive stereo systems. Multimedia tools and applications. Multimed. Tools Appl. 2014, 72, 2413–2438. [Google Scholar] [CrossRef]
- Salvi, J.; Pages, J.; Batlle, J. Pattern codification strategies in structured light systems. Pattern Recognit. 2004, 37, 827–849. [Google Scholar] [CrossRef]
- Ben-Hamadou, A.; Soussen, C.; Daul, C.; Blondel, W.; Wolf, D. Flexible calibration of structured-light systems projecting point patterns. Comput. Vis. Image Underst. 2013, 117, 1468–1481. [Google Scholar] [CrossRef]
- Rayas, J.A.; León-Rodríguez, M.; Martínez, A.; Genovese, K.; Medina, O.M.; Cordero, R.R. Using a single-cube beam-splitter as a fringe pattern generator within a structured-light projection system for surface metrology. Opt. Eng. 2017, 56, 044103. [Google Scholar] [CrossRef]
- Wijenayake, U.; Park, S.Y. Dual pseudorandom array technique for error correction and hole filling of color structured-light three-dimensional scanning. Opt. Eng. 2015, 54, 043109. [Google Scholar] [CrossRef]
- Ayaz, S.M.; Kim, M.Y. Multiview registration-based handheld 3D profiling system using visual navigation and structured light. Int. J. Optomech. 2017, 11, 1–14. [Google Scholar] [CrossRef]
- Park, S.-Y.; Baek, J.; Moon, J. Hand-held 3D scanning based on coarse and fine registration of multiple range images. Mach. Vis. Appl. 2011, 22, 563–579. [Google Scholar] [CrossRef]
- Tam, G.K.L.; Cheng, Z.Q.; Lai, Y.-K.; Langbein, F.C.; Liu, Y.; Marshall, D.; Martin, R.R.; Sun, X.-F.; Rosin, R.L. Registration of 3D point clouds and meshes: A survey from rigid to nonrigid. VCG 2013, 19, 1199–1217. [Google Scholar] [CrossRef] [PubMed]
- Díez, Y.; Roure, F.; Lladó, X.; Salvi, J. A qualitative review on 3D coarse registration methods. ACM Comput. Surv. 2015, 47. [Google Scholar] [CrossRef]
- Yizhi, T.; Feng, J. Hierarchical multiview rigid registration. Comput. Graph. Forum 2015, 34, 77–87. [Google Scholar]
- Geng, J. Structured-light 3D surface imaging: A tutorial. Adv. Opt. Photon. 2011, 3, 128–160. [Google Scholar] [CrossRef]
- Cloud Compare—3D Point Cloud and Mesh Processing Software—Open Source Project. Available online: http://www.danielgm.net/cc/ (accessed on 23 February 2017).
- Salvi, J.; Fernandez, S.; Pribanic, T.; Llado, X. A state of the art in structured light patterns for surface profilometry. Pattern Recognit. 2010, 43, 2666–2680. [Google Scholar] [CrossRef]
- Fantoni, S.; Castellani, U.; Fusiello, A. Accurate and Automatic Alignment of Range Surfaces. In Proceedings of the 2012 Second International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), Zurich, Switzerland, 13–15 October 2012. [Google Scholar]
- Schaffer, M.; Grosse, M.; Kowarschik, R. High-speed pattern projection for three-dimensional shape measurement using laser speckles. Appl. Opt. 2010, 49, 3622–3629. [Google Scholar] [CrossRef] [PubMed]
- Bruno, F.; Bianco, G.; Muzzupappa, M.; Barone, S.; Razionale, A.V. Experimentation of structured light and stereo vision for underwater 3D reconstruction. ISPRS J. Photogramm. Remote. Sens. 2011, 66, 508–518. [Google Scholar] [CrossRef]
- Da, A.; Woodward, A.; Delmas, P. Comparison of active structure lighting mono and stereo camera systems: Application to 3d face acquisition. In Proceedings of the Seventh Mexican International Conference IEEE on Computer Science, 2006. ENC’06, San Luis Potosi, Mexico, 18–22 September 2006. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Sun, W.; Yang, X.; Xiao, S.; Hu, W. Robust Recognition of Checkerboard Pattern for Deformable Surface Matching in Multiple Views. In Proceedings of the High Performance Computing & Simulation (HPCS 2008) Conference, Nicosia, Cyprus, 3–6 June 2008; p. 265. [Google Scholar]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Newton, MA, USA, 2008. [Google Scholar]
- Cho, H. Optomechatronics: Fusion of Optical and Mechatronic Engineering; CRC press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- MeshLab. Available online: http://www.meshlab.net/ (accessed on 23 February 2017).
- Hu, E.; He, Y. Surface profile measurement of moving objects by using an improved π phase-shifting Fourier transform profilometry. Opt. Lasers Eng. 2009, 47, 57–61. [Google Scholar] [CrossRef]
- Chen, C.S.; Hung, Y.P.; Chiang, C.C.; Wu, J.L. Range data acquisition using color structured lighting and stereo vision. Image Vis. Comput. 1997, 15, 445–456. [Google Scholar] [CrossRef]
- Kim, Y.M.; Ayaz, M.S.; Park, J.; Roh, Y. Adaptive 3D sensing system based on variable magnification using stereo vision and structured light. Opt. Lasers Eng. 2014, 55, 113–127. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object Modelling by Registration of Multiple Range Images. Image Vis. Comput. Butterworth-Heinemann 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Besl, P.J.; McKaym, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Wissmann, P.; Forster, F.; Schmitt, R. Fast and low-cost structured light pattern sequence projection. Opt. Express 2011, 19, 24657–24671. [Google Scholar] [CrossRef] [PubMed]
- Koch, S. Development of a Mobile Projector Camera System for Structured Light Scanning. Ph.D. Thesis, Universität Stuttgart, Stuttgart, Germany, 2012. [Google Scholar]
- Taguchi, Y.; Jian, Y.; Ramalingam, S.; Feng, C. Point-plane SLAM for hand-held 3D sensors. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 5182–5189. [Google Scholar]
- Marden, S.; Guivant, J. Improving the Performance of ICP for Real-Time Applications using an Approximate Nearest Neighbour Search. In Proceedings of the Australasian Conference on Robotics and Automation, Wellington, New Zealand, 3–5 December 2012. [Google Scholar]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-ICP. In Proceedings of the Conference: Robotics: Science and Systems, Seatttle, WA, USA, 28 July–1 July 2009. [Google Scholar]
- Amberg, B.; Romdhani, S.; Vetter, T. Optimal step nonrigid icp algorithms for surface registration. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition CVPR’07, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Kjer, H.M.; Wilm, J. Evaluation of Surface Registration Algorithms for PET Motion Correction. Bachelor’s Thesis, Technical University of Denmark, Lyngby, Denmark, 2010. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geomerty in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the IEEE Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No. | Object Dimension | Original Value (mm) | Mean Measured Value (mm) | Mean Error (μm) |
|---|---|---|---|---|
| 1. | Height | 55.54 | 55.5494 | 9.4 |
| 2. | Length | 241.51 | 241.533 | 23 |
| S.No. | Pair of Point Clouds | Average 3D Points of Point Clouds | RMS for ICP Algorithm (mm) |
|---|---|---|---|
| 1. | First | 883,116 | 0.7143 |
| 2. | Second | 881,165 | 0.4990 |
| 3. | Third | 875,165 | 0.7621 |
| S.No. | ICP Variants | Measured Angle (deg) | Ground Truth Angle (deg) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 1. | Point to point | 2.29 | 3.64 | 6.70 | 8.90 | 2 | 4 | 6 | 8 |
| 2. | Point to plane | 2.44 | 3.74 | 6.51 | 8.49 | 2 | 4 | 6 | 8 |
| 3. | Point to plane (10% worst rejection) | 2.43 | 3.66 | 6.35 | 8.94 | 2 | 4 | 6 | 8 |
| 4. | Point to point with edge rejection | 2.26 | 3.58 | 6.66 | 8.78 | 2 | 4 | 6 | 8 |
| 5. | Point to plane with edge rejection | 2.36 | 3.67 | 6.49 | 8.45 | 2 | 4 | 6 | 8 |
| 6. | LM with Edge rejection | 2.26 | 3.58 | 6.66 | 8.78 | 2 | 4 | 6 | 8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ayaz, S.M.; Khan, D.; Kim, M.Y. Three-Dimensional Registration for Handheld Profiling Systems Based on Multiple Shot Structured Light. Sensors 2018, 18, 1146. https://doi.org/10.3390/s18041146
Ayaz SM, Khan D, Kim MY. Three-Dimensional Registration for Handheld Profiling Systems Based on Multiple Shot Structured Light. Sensors. 2018; 18(4):1146. https://doi.org/10.3390/s18041146
Chicago/Turabian StyleAyaz, Shirazi Muhammad, Danish Khan, and Min Young Kim. 2018. "Three-Dimensional Registration for Handheld Profiling Systems Based on Multiple Shot Structured Light" Sensors 18, no. 4: 1146. https://doi.org/10.3390/s18041146
APA StyleAyaz, S. M., Khan, D., & Kim, M. Y. (2018). Three-Dimensional Registration for Handheld Profiling Systems Based on Multiple Shot Structured Light. Sensors, 18(4), 1146. https://doi.org/10.3390/s18041146