4.1. Deployment of Beacon Points in OTPP
Table 3 presents the flow of how to deploy the beacon points by OTPP which is coherent with the following lemmas. The following lemmas prove that OTPP guarantees full coverage of localization of unknown nodes.
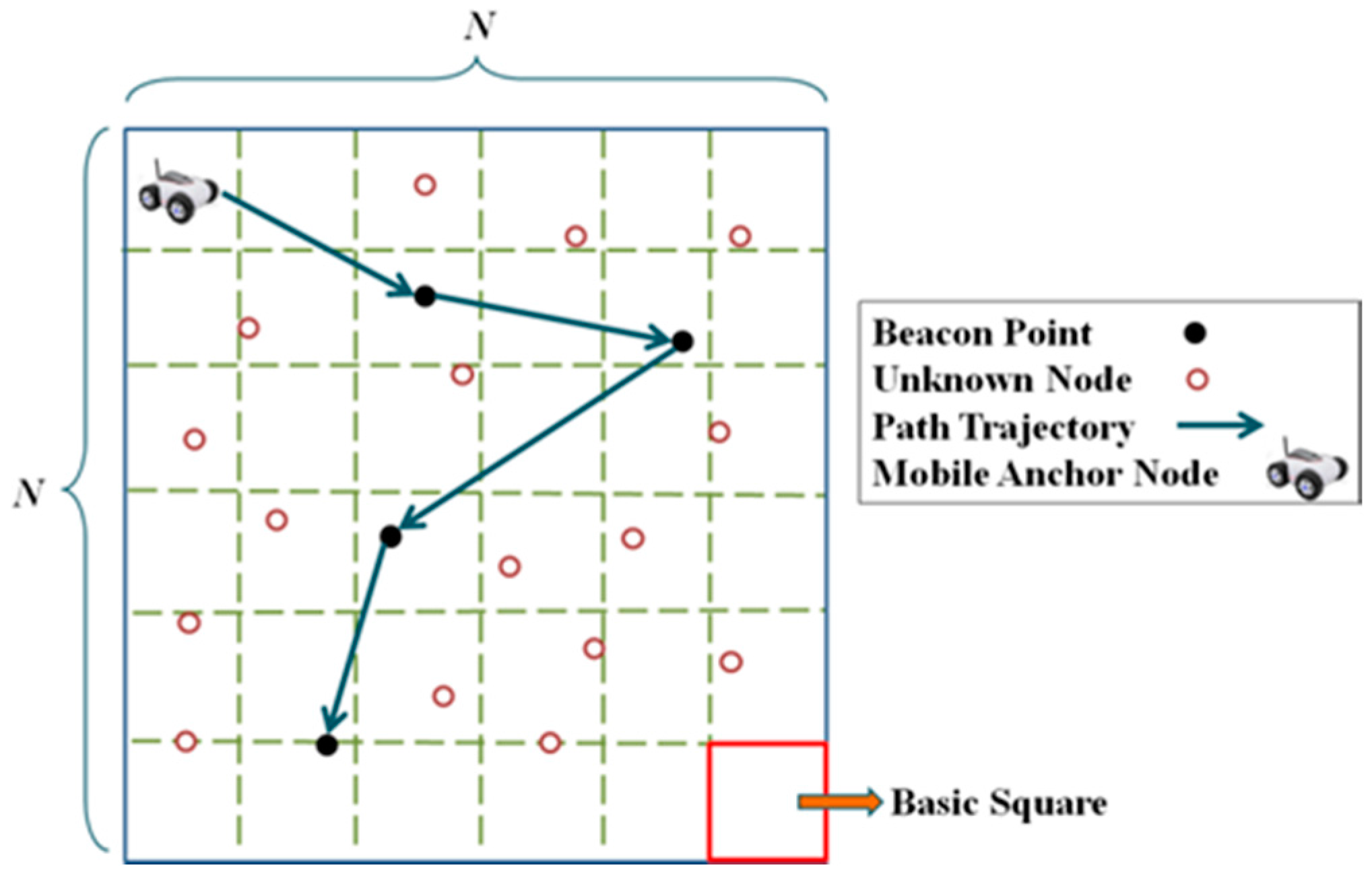
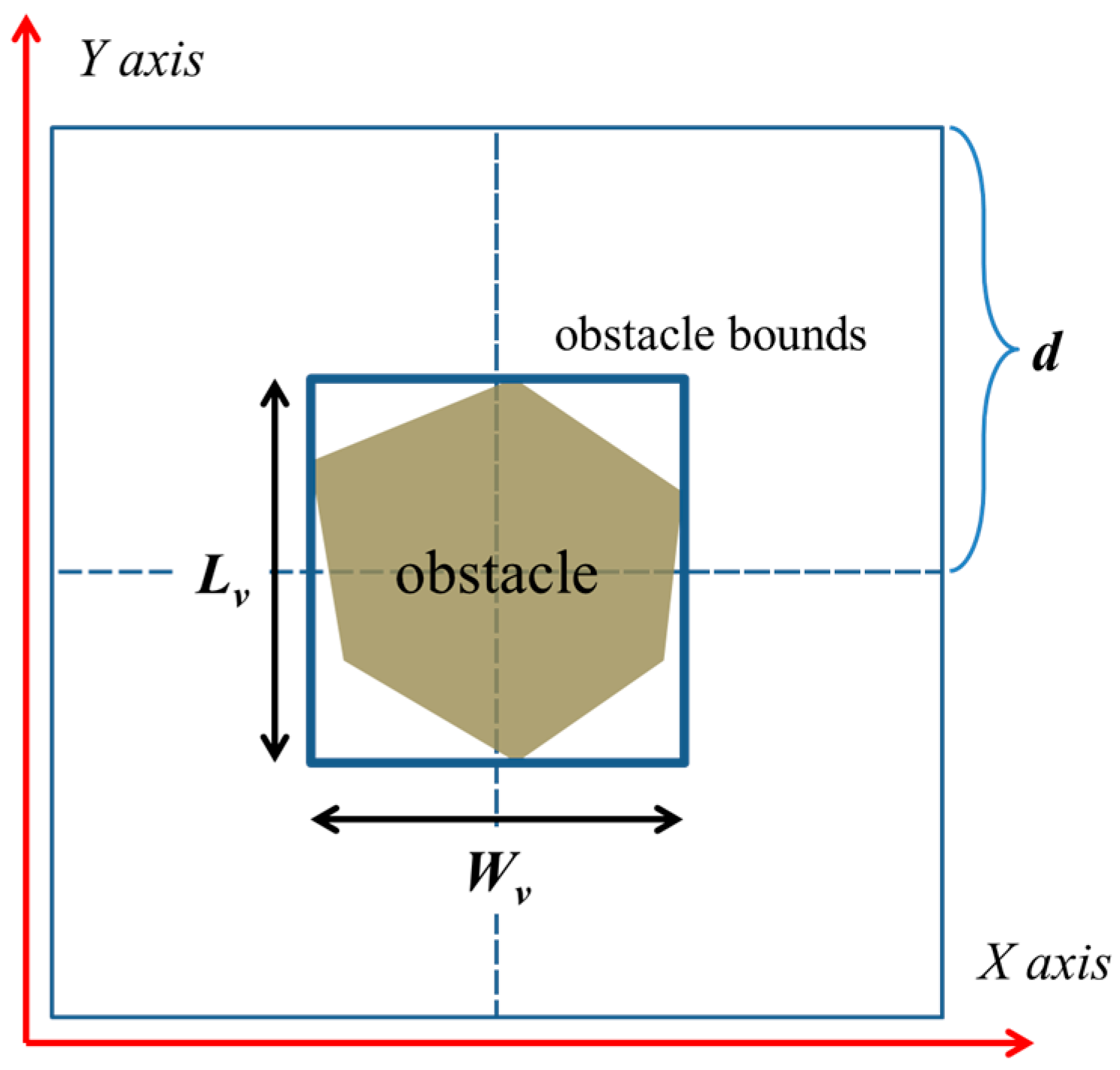
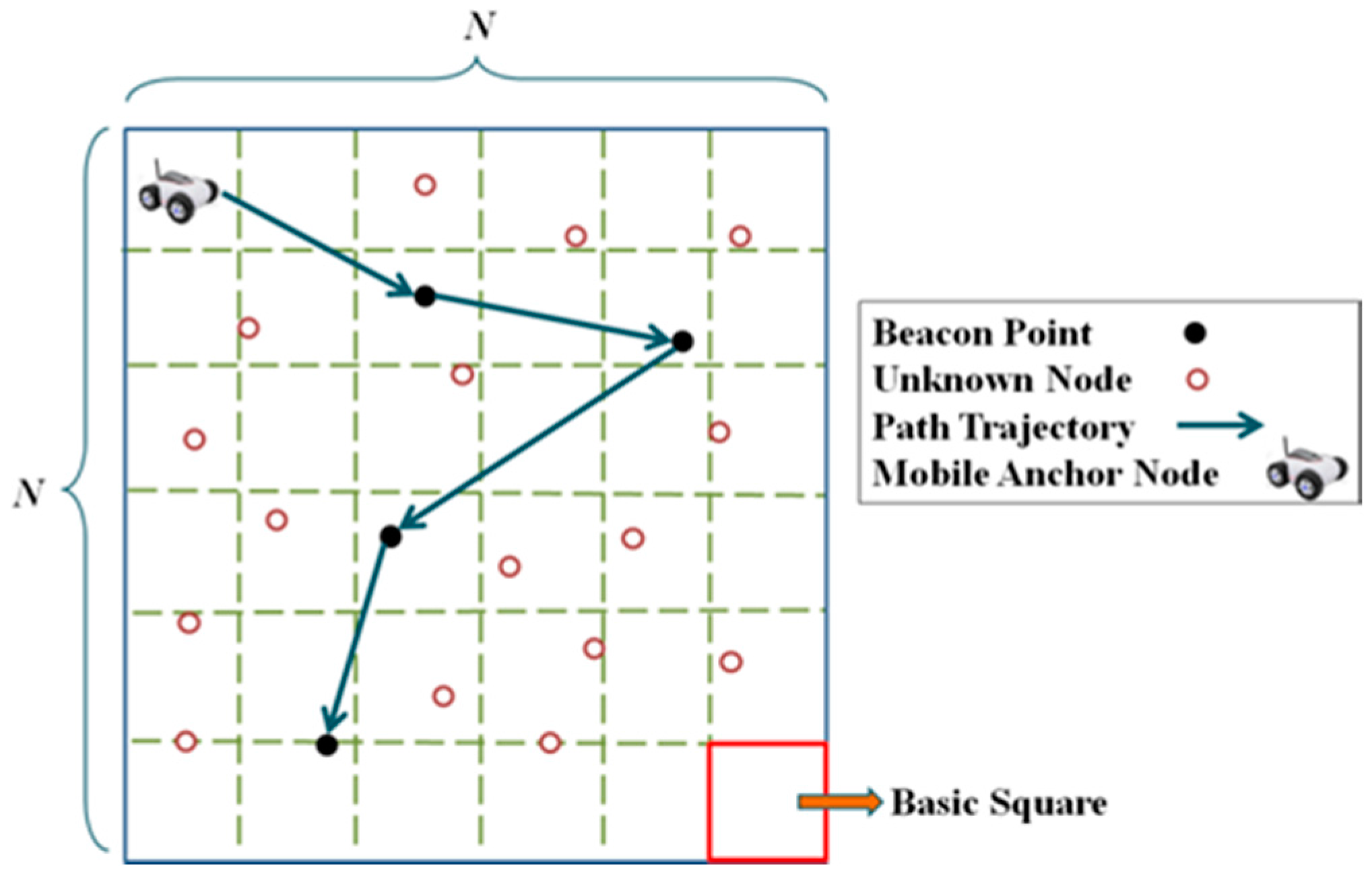
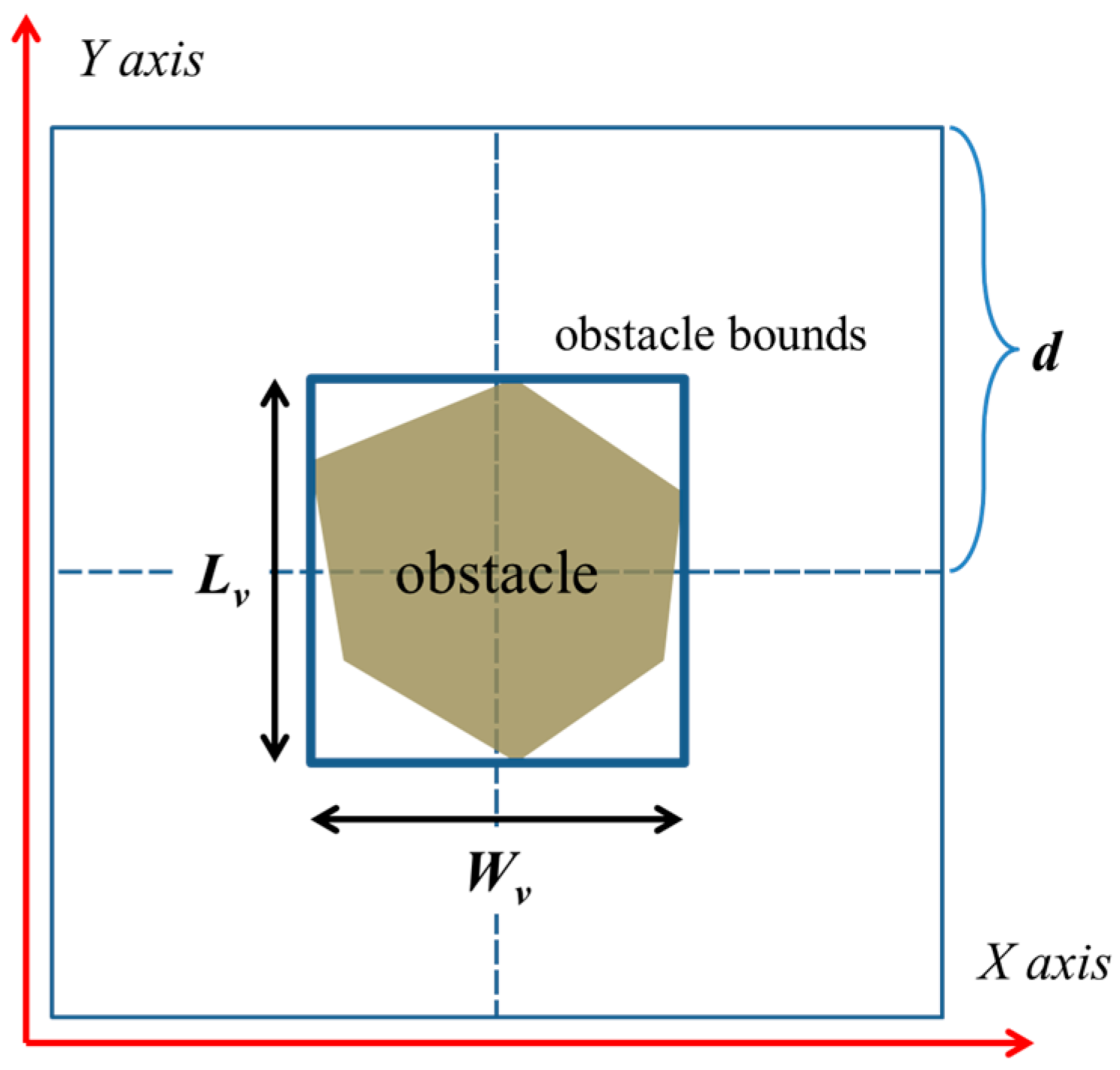
Definition 3. Basic square with obstacles. Assume that each basic square contains a maximum of one obstacle with sides of lengths Ly and Wy, and the center of the obstacle lies on the position of the beacon point c0.
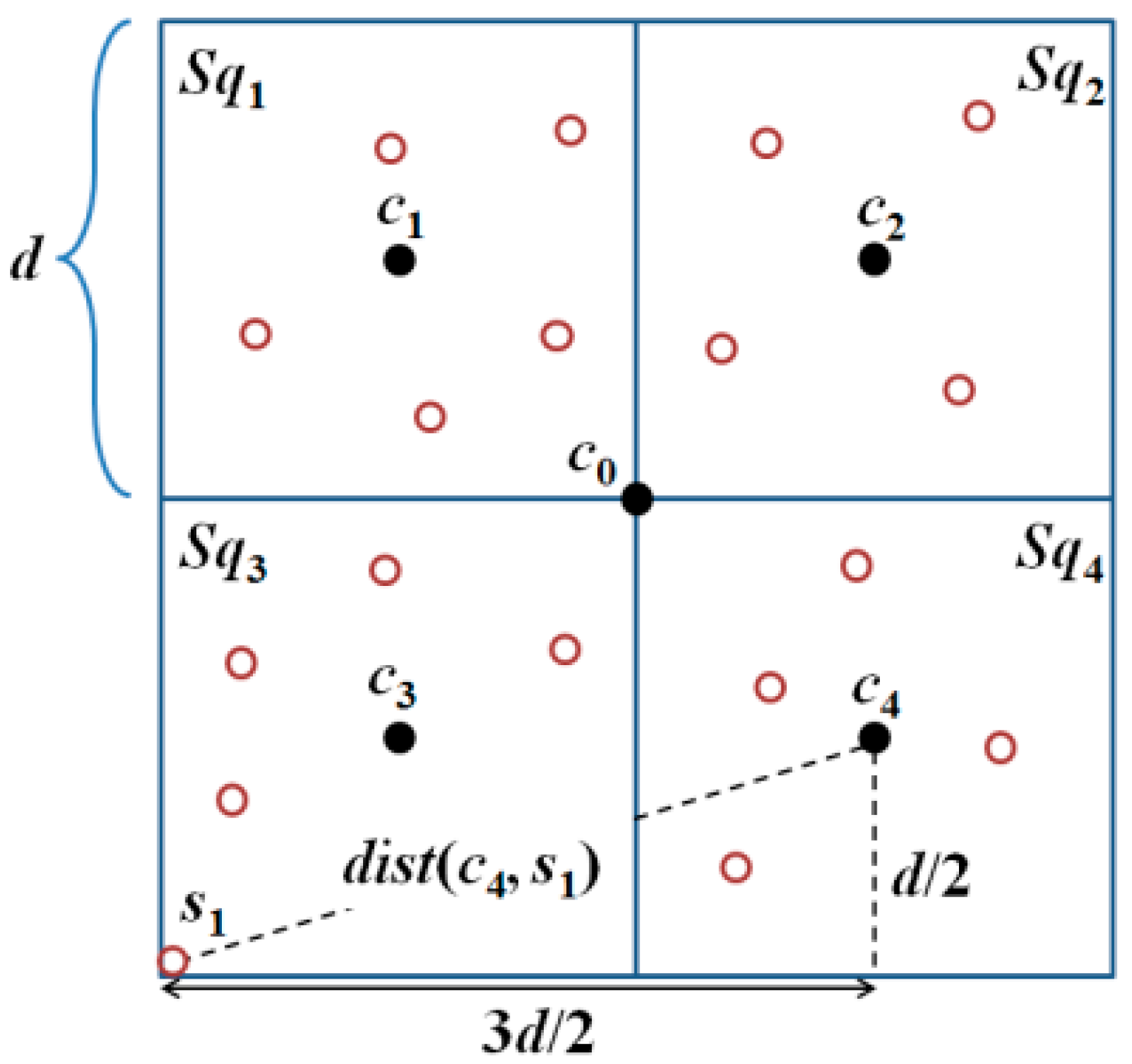
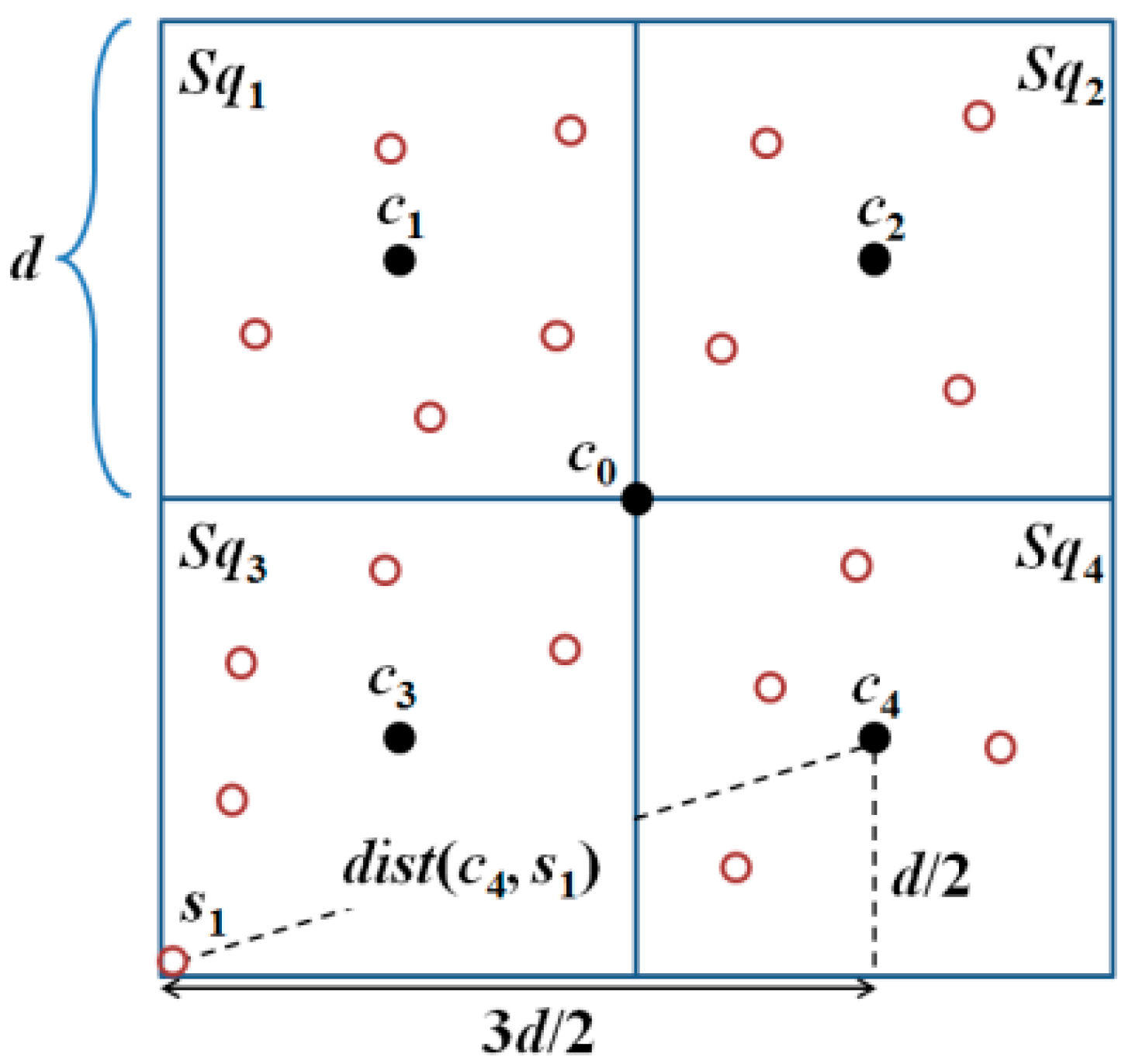
To determine the optimal placement of beacon points in a basic square with obstacles, we adopt divide-and-conquer approach. We first divide a basic square to four sub-squares because it is the maximum number of sub-squares which are identical and with minimum area size. To minimize the number of beacon points, the optimal location of beacon point should be able to cover all the unknown nodes in a sub-square. The union of optimal locations are called reg. As long as there are three non-collinear locations in reg selected as beacon points, all the unknown nodes can be localized in a sub-square. Accordingly, we can obtain the following Lemma 2.
Lemma 2. If all the unknown nodes si in the sub-square can be localized, then, three non-collinear beacon points need to be present, and all the three beacon points will lie within reg1.
Proof. The localization of an unknown node’s position requires at least three non-collinear beacon points [
2]. Lemma 1 indicates that all the unknown nodes within the basic square can be localized. Therefore, the communication range (
CR) of the MAN and unknown nodes are at least
. Since the four sub-squares are identical, we consider sub-square
Sq1 as representative. In sub-square
Sq1, the maximum distance is
. Hence, three beacon points are required to localize all the unknown nodes when no obstacles are present. When obstacles are present, to find
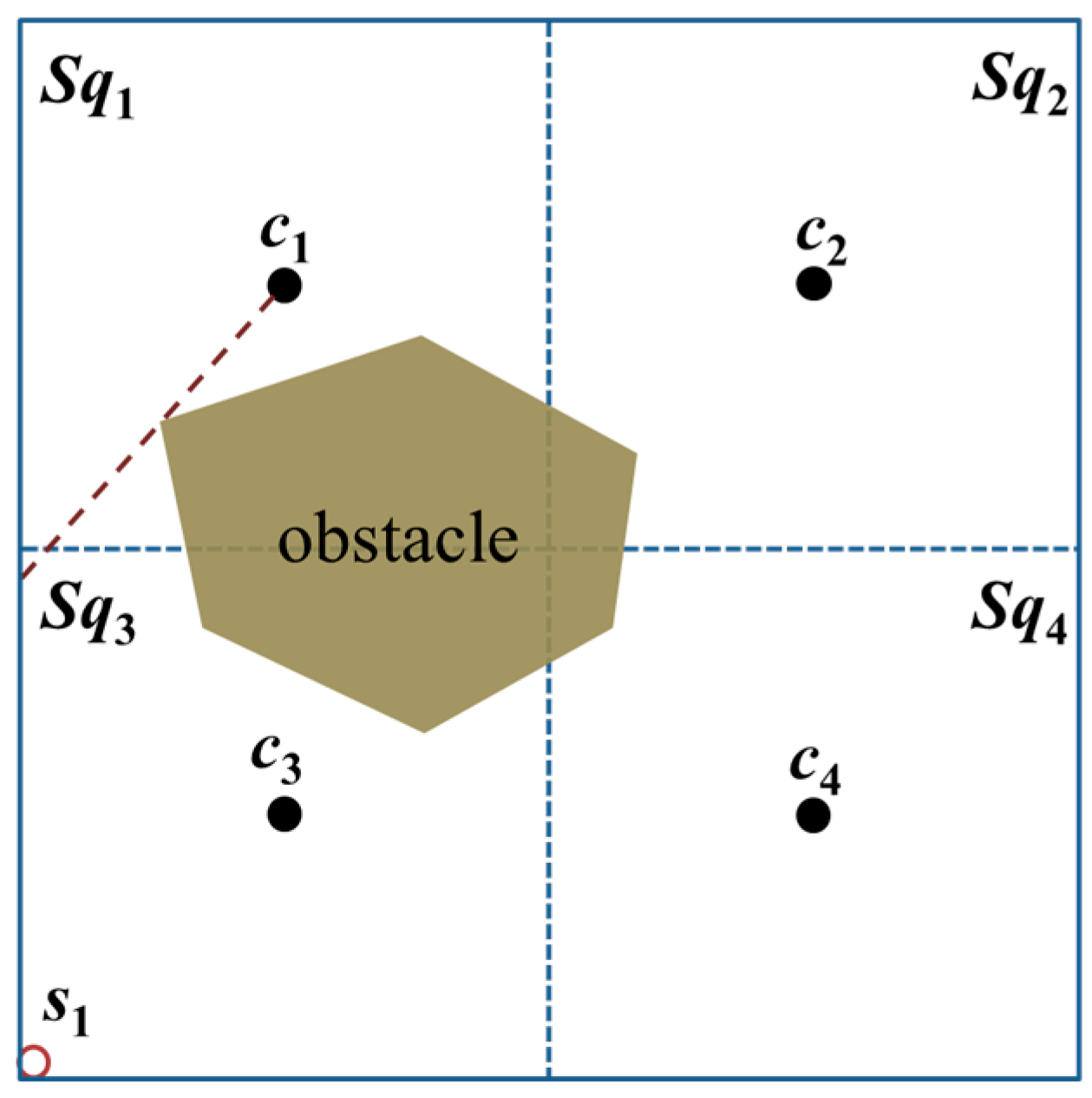
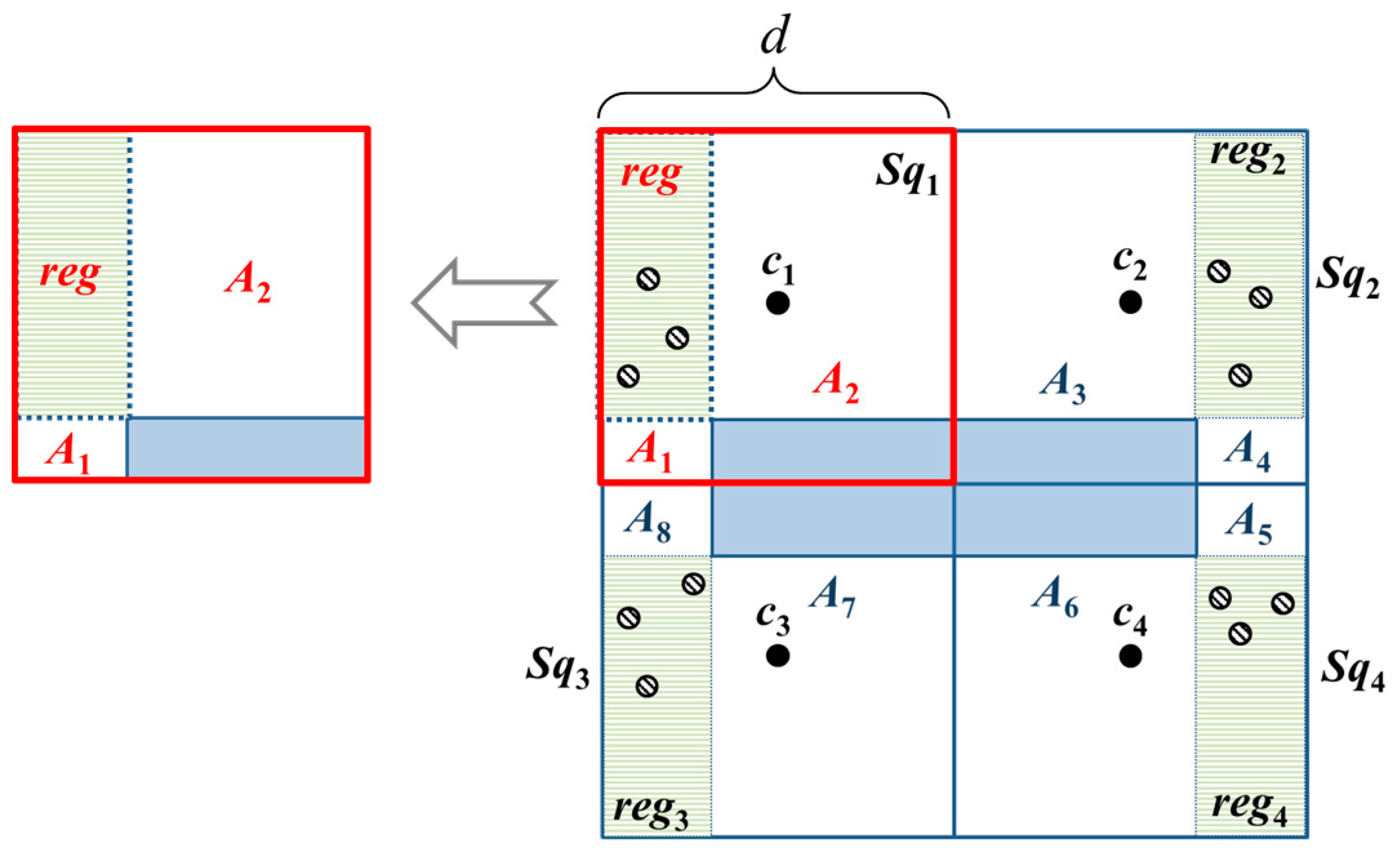
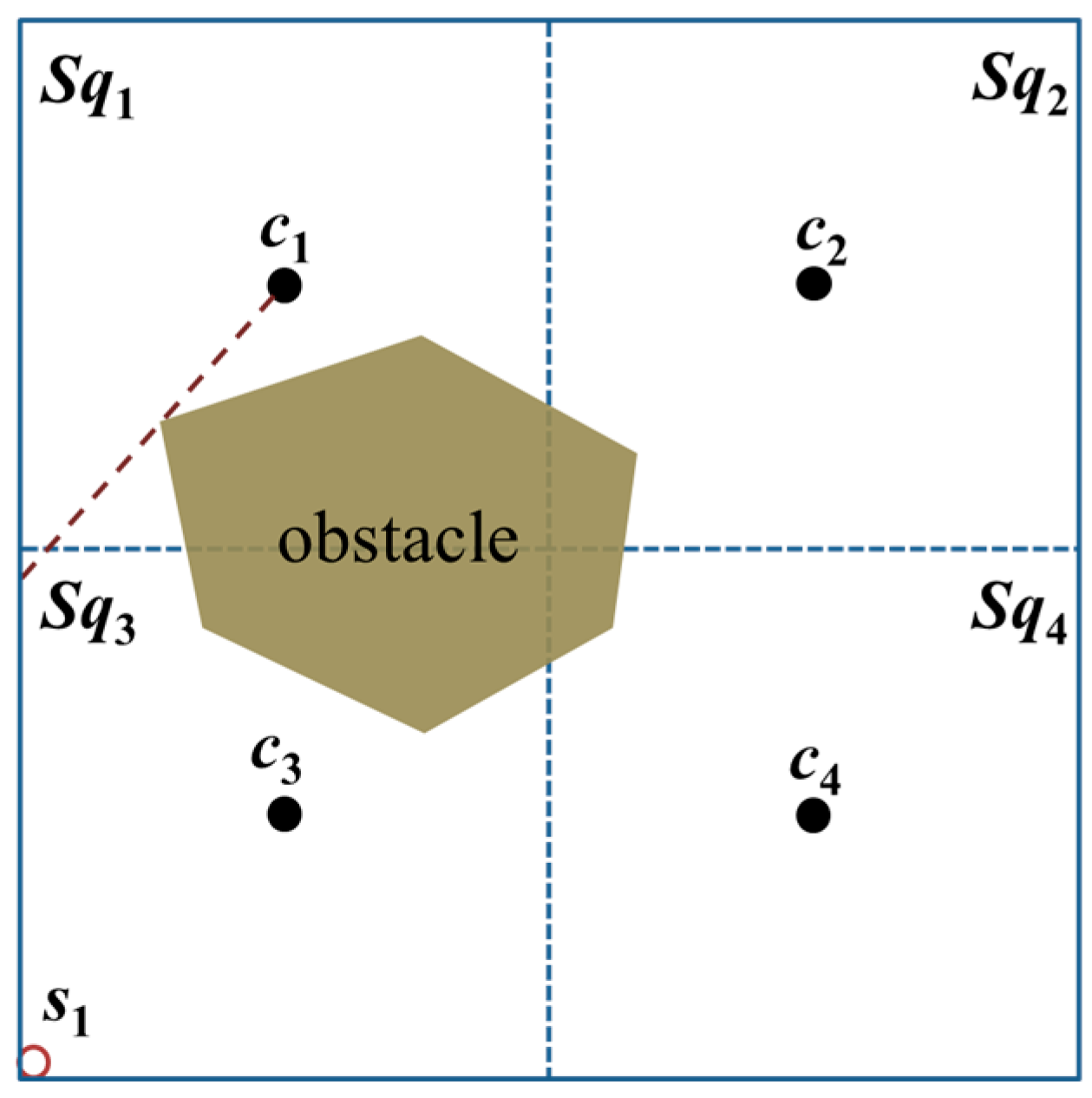
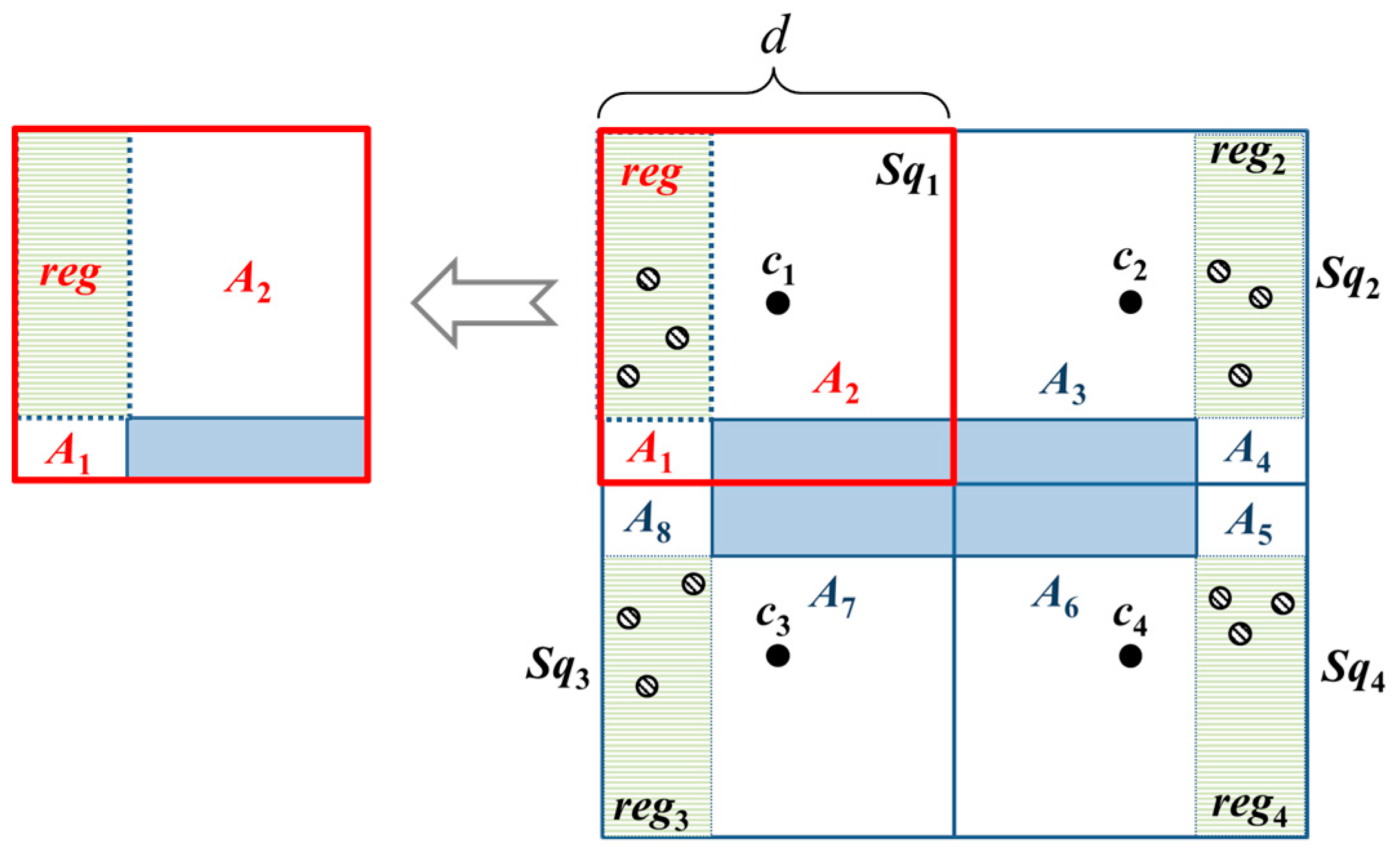
reg, we extend the sides of the obstacle and hence the sub-squares are divided into three regions.
reg is then bounded by the two lines from the extended sides of the obstacle. The other two regions,
A1 and
A2, cannot guarantee to cover all the unknown nodes in
Sq1. To cover all unknown nodes in
A1, the locations of three beacon points are bounded to the area on the left of the obstacle which are
A1 and
reg1. To cover all unknown nodes in
A2, the locations of three beacon points are bounded to the area above the obstacle which are
A2 and
reg1. The intersection of the two areas is
reg, as shown in
Figure 6. ☐
We may obtain the following (Corollary 1) to enable the localization of all the unknown nodes si within the entire basic square.
Corollary 1. Given that each sub-square Sqh (h ∈ {1, 2, 3, 4}) requires three beacon points, twelve beacon points should be added to cover the entirety of a basic square.
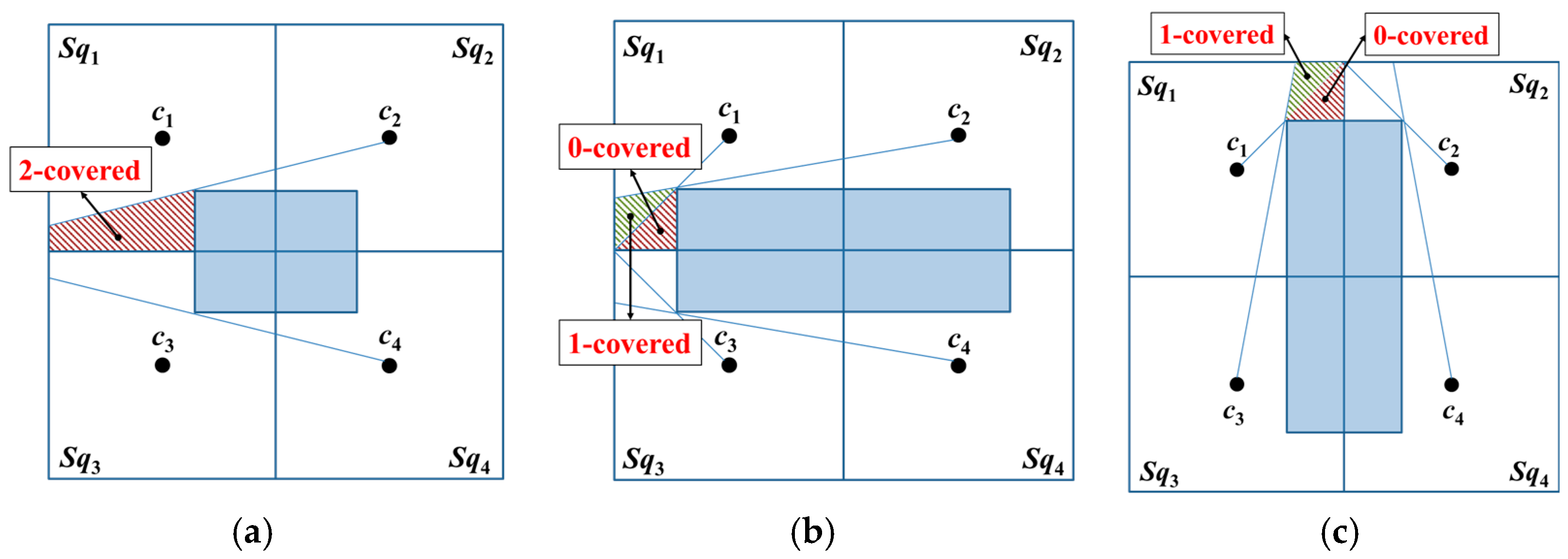
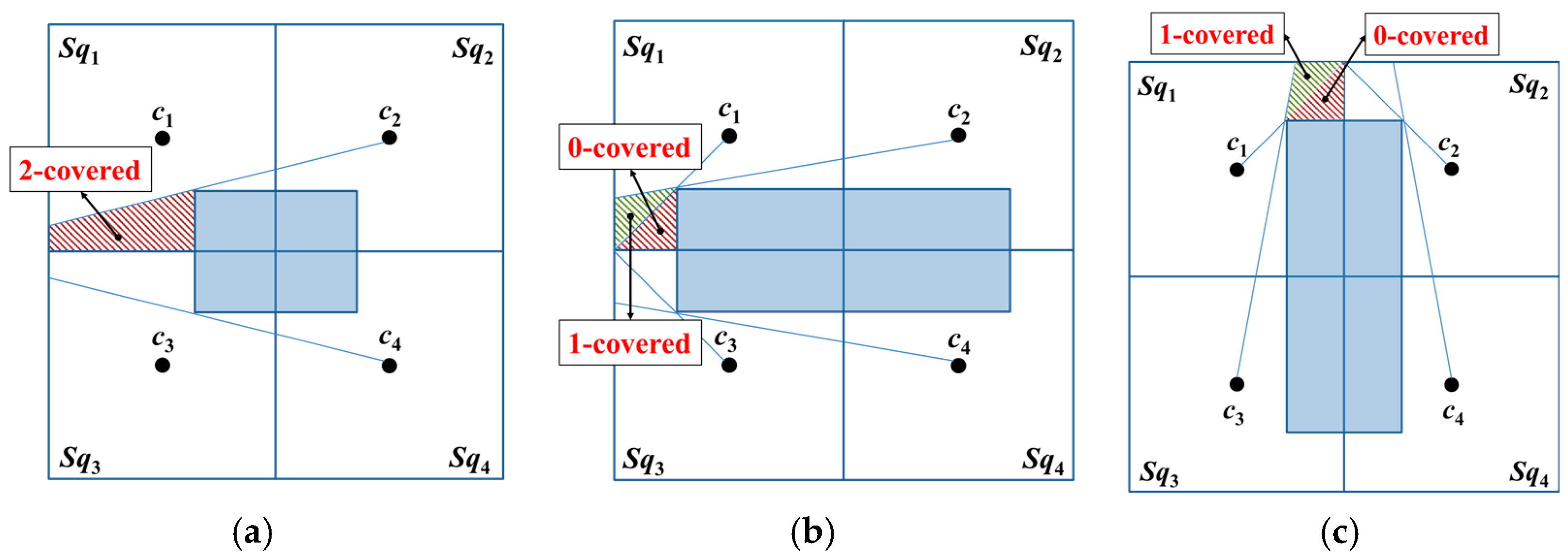
Beacon points should be added in reg1–reg4 owing to obstacle blocking and to ensure that each sub-square is a three-covered area. For a two-covered area, we can further obtain the following Lemma 3.
Lemma 3. When a basic square contains two-covered areas, all the unknown nodes in a basic square can be localized, and a minimum of four beacon points should be added.
Proof. When a basic square contains two-covered areas; the basic square can be divided into 12 regions based on the sides of the obstacle (i.e., reg1–reg4 and A1–A8), and two-covered areas lie within Ai, i ∈ {1, 2, …, 8}. Therefore, adding a beacon point to reg1 results in the A1 and A2 regions receiving three beacon packets, thereby enabling the localization of the unknown nodes in these regions. Similarly, the addition of a beacon point to each of reg2–reg4 will enable each of the A3–A8 regions to receive three beacon packets and enable the localization of all the unknown nodes in these regions. Therefore, four beacon points should be added to enable the localization of all the unknown nodes within the entirety of the basic square. ☐
Lemma 4. When a basic square contains zero-covered and one-covered areas, twelve beacon points should be added to the entirety of the basic square.
Proof. The basic square contains zero-covered and one-covered regions, and can be divided into twelve regions based on the sides of the obstacle (i.e., reg1–reg4 and A1–A8), in which zero- and one-covered areas are present in A1, A4, A5, and A8. Meanwhile, two-covered regions are present in A2, A3, A6, and A7. Hence, the addition of three beacon points to reg1 will enable the A1 and A2 regions to receive three beacon packets and the localization of the unknown nodes within these regions. Similarly, the addition of three beacon points to each of reg2–reg4 enables each of A3–A8 to receive three beacon packets. Hence, the addition of twelve beacon points enables the localization of all the unknown nodes in the basic square. ☐
However, in Lemmas 3 and 4, which consider only the number of beacon points that should be deployed within each sub-square and do not consider the optimal deployment location, the excess number of beacon points will cause the MAN and unknown nodes to incur high energy cost.
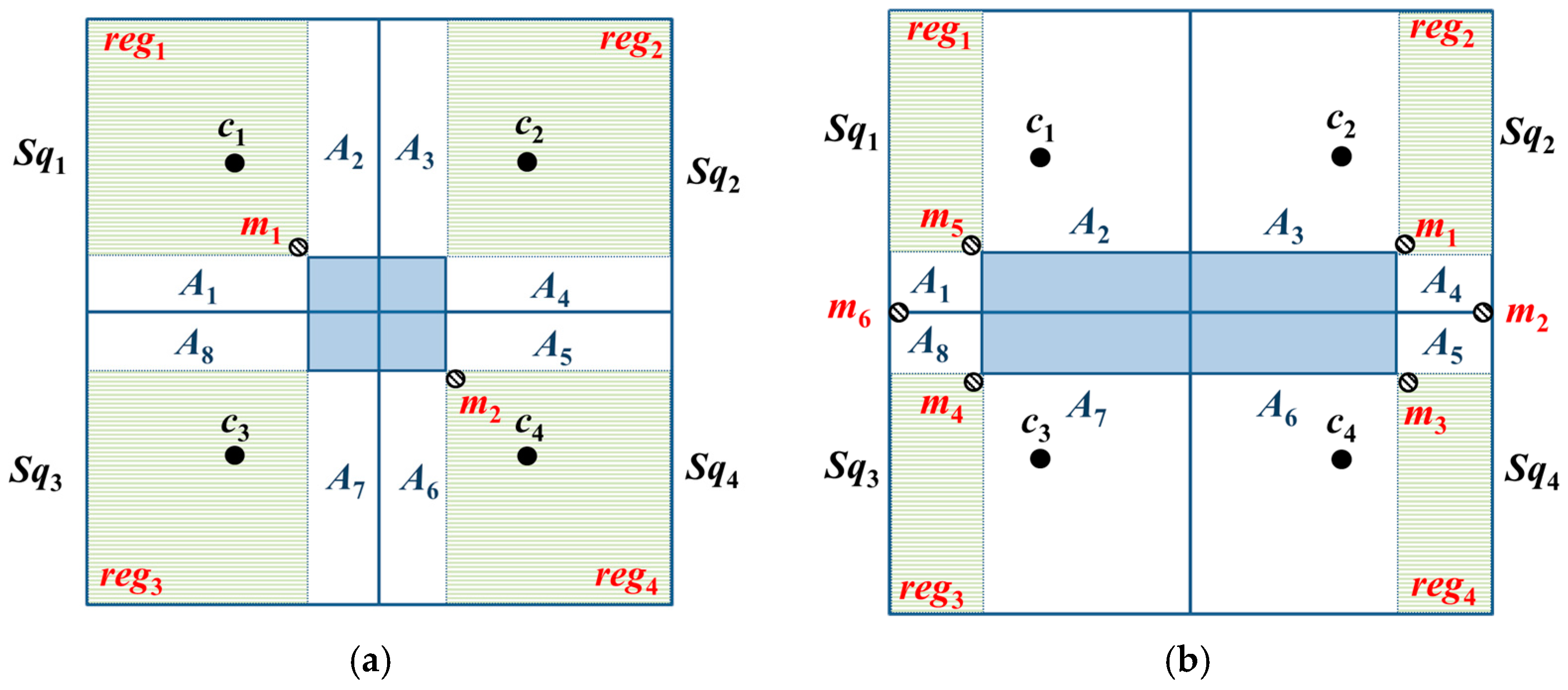
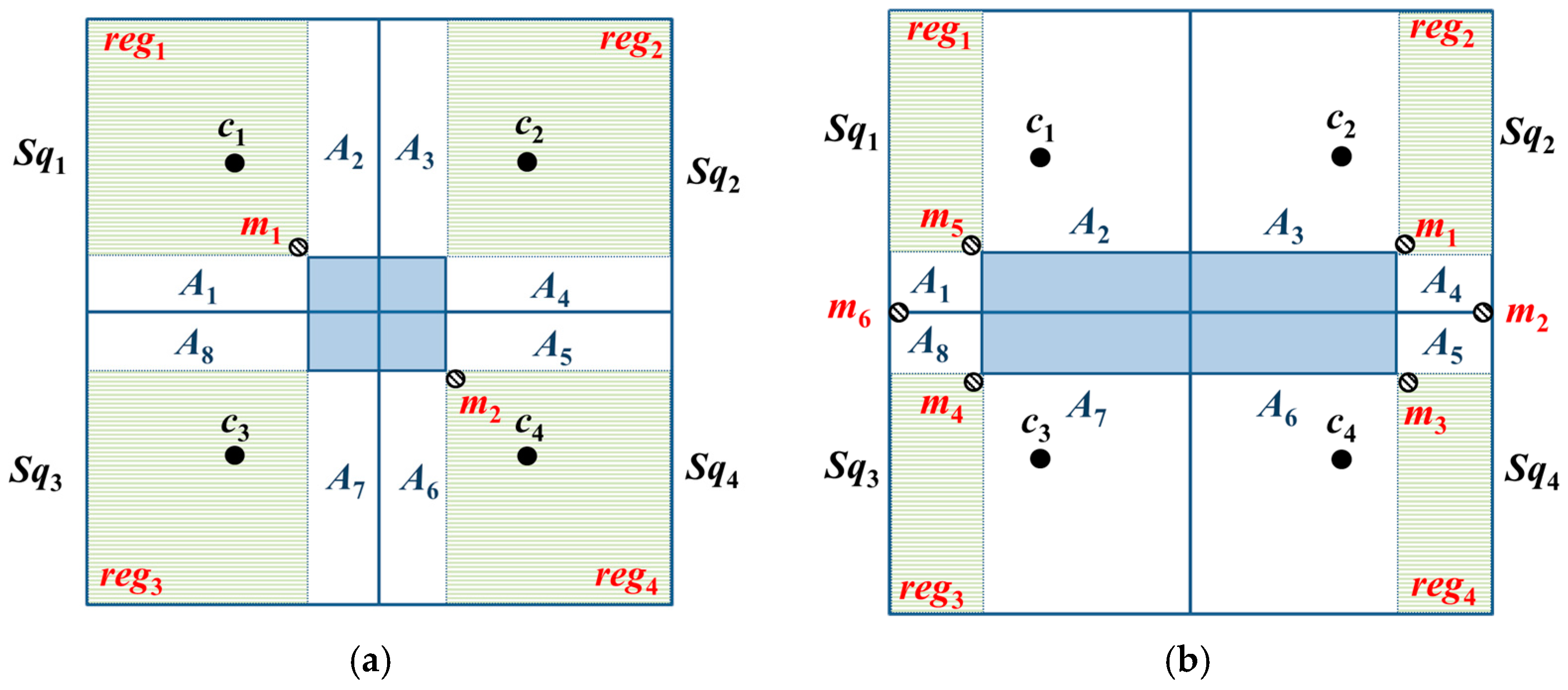
Lemma 5. When a basic square contains two-covered areas, a particular layout will enable two beacon points to completely cover the entirety of the basic square.
Proof. Lemma 3 indicates that the addition of a beacon point to each sub-square will enable complete coverage of the entirety of a basic square. However, this placement method does not consider the area that can be covered by a beacon point and only places a beacon point in each sub-square. Therefore, if we consider
CR ≥
, then,
A1,
A2,
A3, and
A8 can be covered straightforwardly by placing a beacon point at the position m
1. In addition, all the unknown nodes in
A1,
A2,
A3, and
A8 will be able to receive at least three beacon packets. Similarly, by placing a beacon point at position m
2,
A4–
A7 will be covered, and all the unknown nodes in
A4–
A7 will receive at least three beacon packets. Therefore, two beacon points should be added to completely cover the entirety of the basic square, as shown in
Figure 7a. ☐
Lemma 6. When a basic square contains zero- and one-covered areas, a particular layout will enable six beacon points to completely cover the entirety of the basic square.
Proof. Lemma 4 indicates that the addition of three beacon points to each sub-square will cover the entirety of a basic square. However, this placement method does not consider the area that can be covered by the beacon point and only places three beacon points in each sub-square. Therefore, if we consider
CR ≥
, then, placing a beacon point in each of
m4,
m5, and
m6 will cover
reg1,
reg3,
A1,
A2,
A7, and
A8. In addition, the unknown nodes in these regions will receive at least three beacon packets. Similarly, adding a beacon point to each of
m1–
m3 will cover
reg2,
reg4, and
A3–
A6; moreover, the unknown nodes in these regions will also receive at least three beacon packets. Therefore, the addition of six beacon points will enable complete coverage over the entirety of the basic square, as shown in
Figure 7b. ☐
We can further calculate the total number of beacon points required for OTPP, NBP, as described by Lemma 7:
Lemma 7. In OTPP, the entire basic square contains only three-covered areas; the total number of beacon points, , required is five. The basic square contains two-covered areas; the total number of beacon points required is six; the basic square contains zero-covered and one-covered areas, and the total number of beacon points required is ten. Proof. In an obstacle-free environment, the total number of beacon points,
, required for OTPP is five (
c0,
c1,
c2,
c3,
c4). When the entire basic square contains two-covered areas, which require adding two beacon points, the total maximum number of beacon points required is six (see
Figure 7a). When the basic square contains zero-covered and one-covered areas, which require adding six beacon points, the total maximum number of beacon points required is ten (see
Figure 7b). ☐
4.2. Path Planning in OTPP
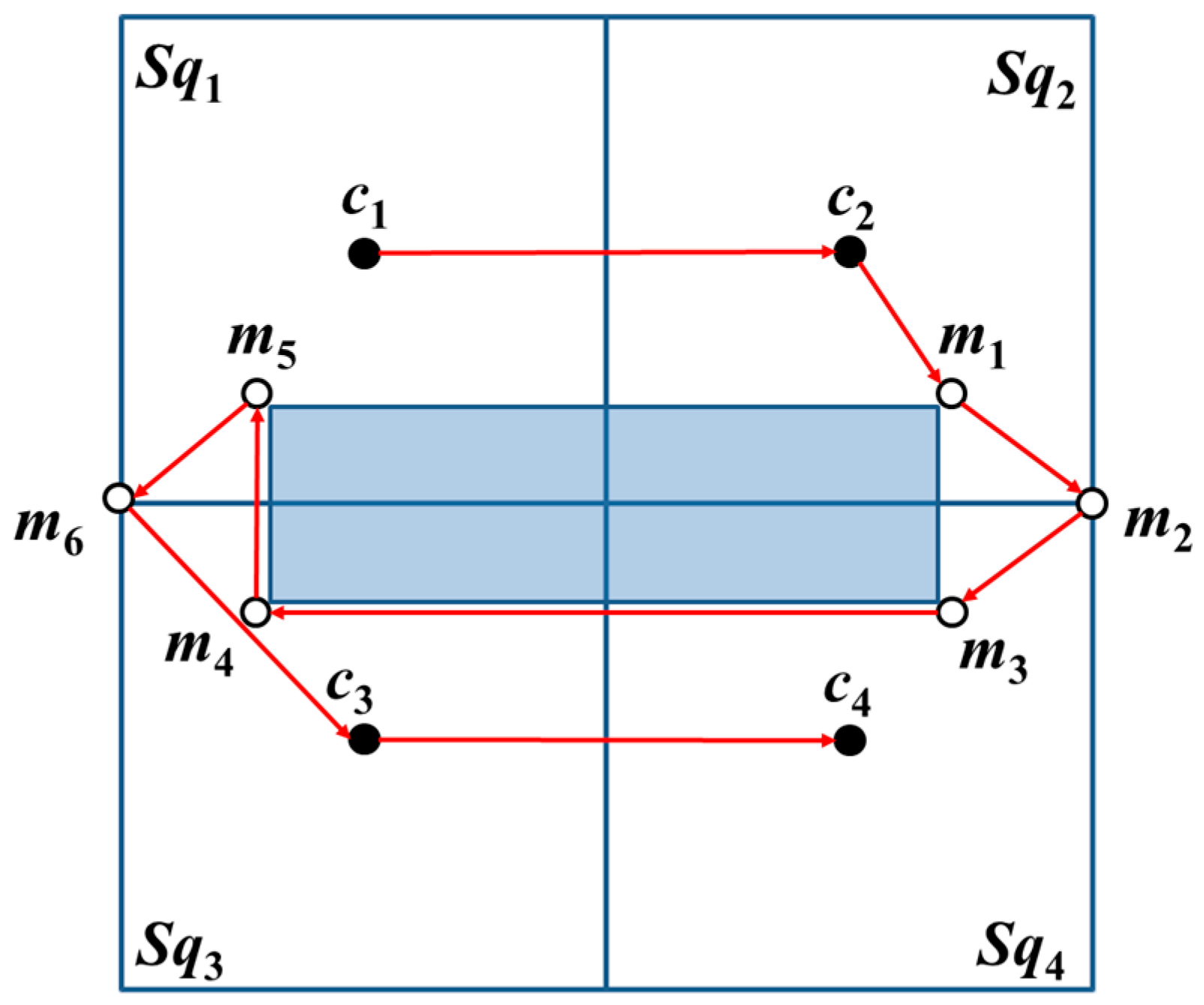
The MAN must visit all the positions of the beacon points if the beacon points c1 and c4 were designated as its first (starting) point and final (ending) point positions for visitation. In the obstacle-free environment, the visit order of the beacon points for MAN is c1, c2, c0, c3, and c4.
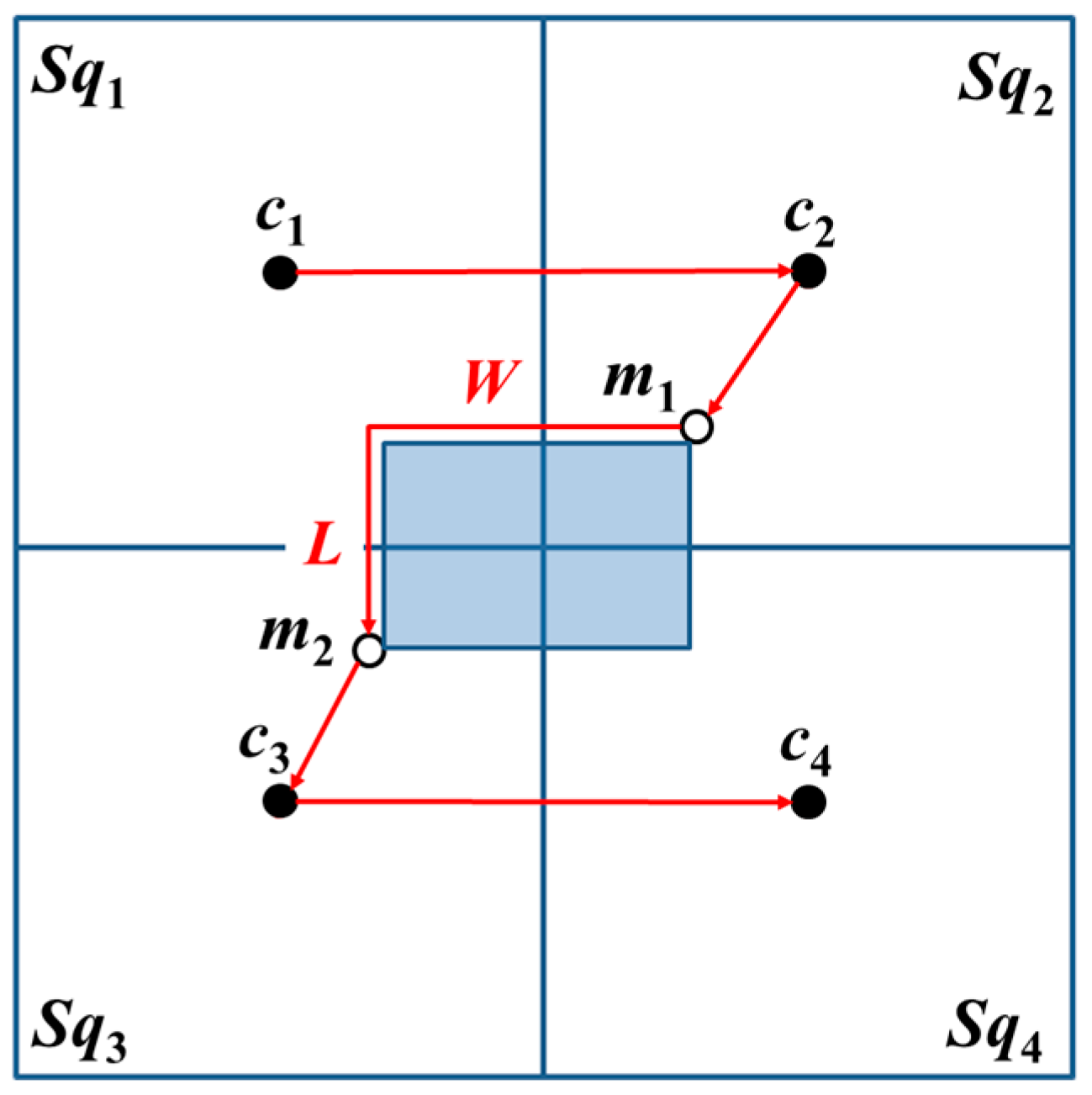
1. Basic square containing two-covered areas
When the basic square contains two-covered areas, the MAN first visits
c1 and
c2. From the four corners of an obstacle, the proximate location from
c2 is selected, which is an additional beacon point
m1, and its diagonal position is set as
m2. Thereafter, the MAN visits
m1 and
m2. Lastly, the MAN visits
c3 and
c4, i.e., the MAN completes the travel on the entire basic square, as shown in
Figure 8.
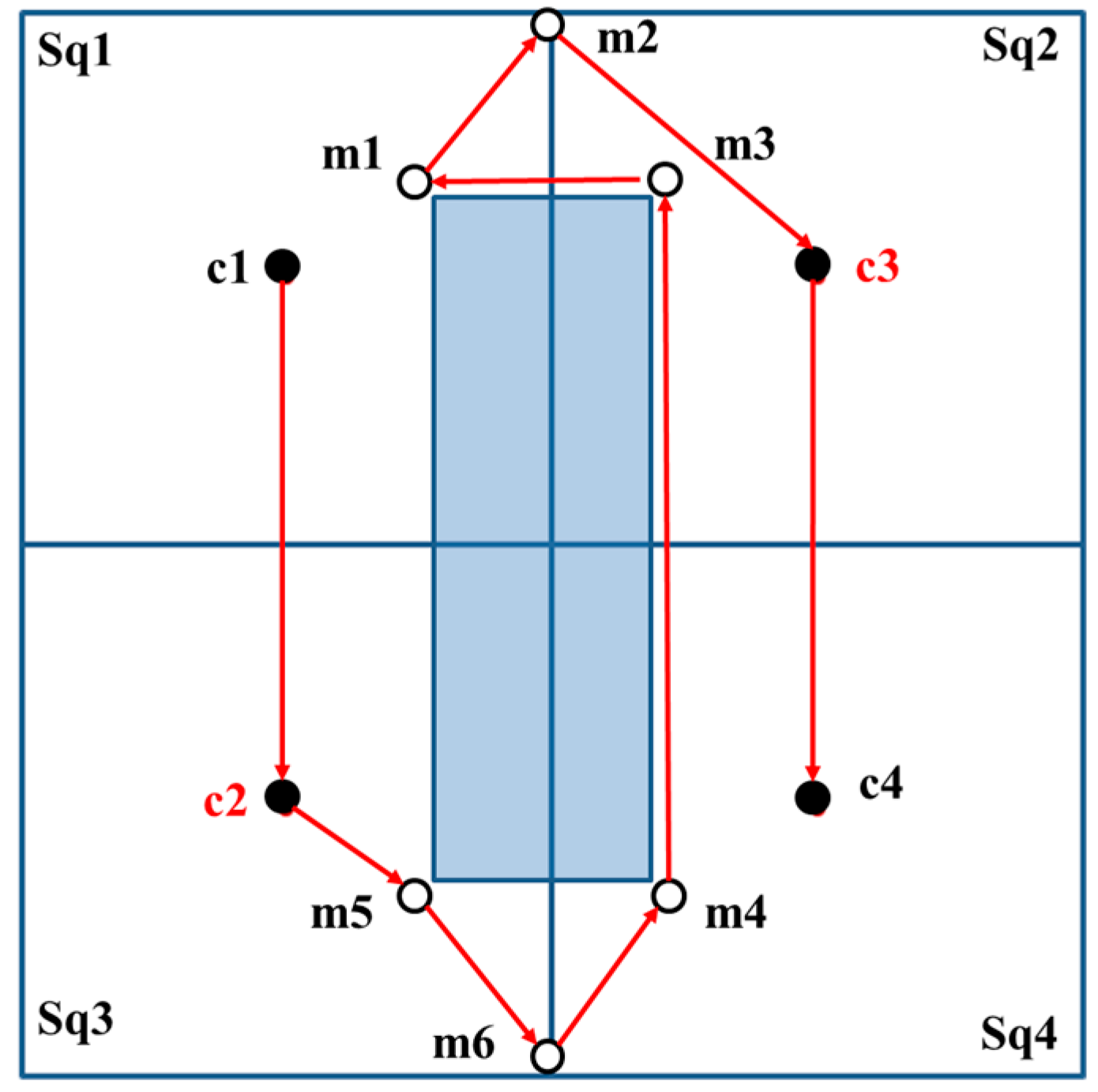
2. Basic square containing zero- and one-covered areas
When the basic square contains zero-covered and one-covered areas, the MAN verifies whether the path from
c1 to
c2 is obstructed by an obstacle or if
c1 to
c2 has a straight path without being obstructed by an obstacle. The MAN first visits
c1 and
c2. Among the additional beacon points
mq (
q = 1, 2, …, 6), the additional beacon point proximate to
c2 is selected as the next beacon point to be visited following the visit to
m1–
m6. Lastly, the MAN visits
c3 and
c4, as shown in
Figure 9.
In another case, if the straight-line path from
c1 to
c2 is blocked by an obstacle, then, the positions of
c2 and
c3 are interchanged. The MAN first visits
c1 and
c2. Thereafter, additional beacon points
mq, proximate to
c2 are selected as the beacon points to be visited next. The sequential visits to the additional beacon points follow the order
m5,
m6,
m4,
m3,
m1, and
m2. Lastly, the MAN visits
c3 and
c4, as shown in
Figure 10.
Figure 10 is considered as the result of the rotation of
Figure 9 by 90°.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}