Height Error Correction for Shoe-Mounted Inertial Sensors Exploiting Foot Dynamics



Abstract
1. Introduction
2. Proposed Height Error Correction (HUPT)
2.1. Horizontal Surfaces and Stairs Identification
3. Experimental Results
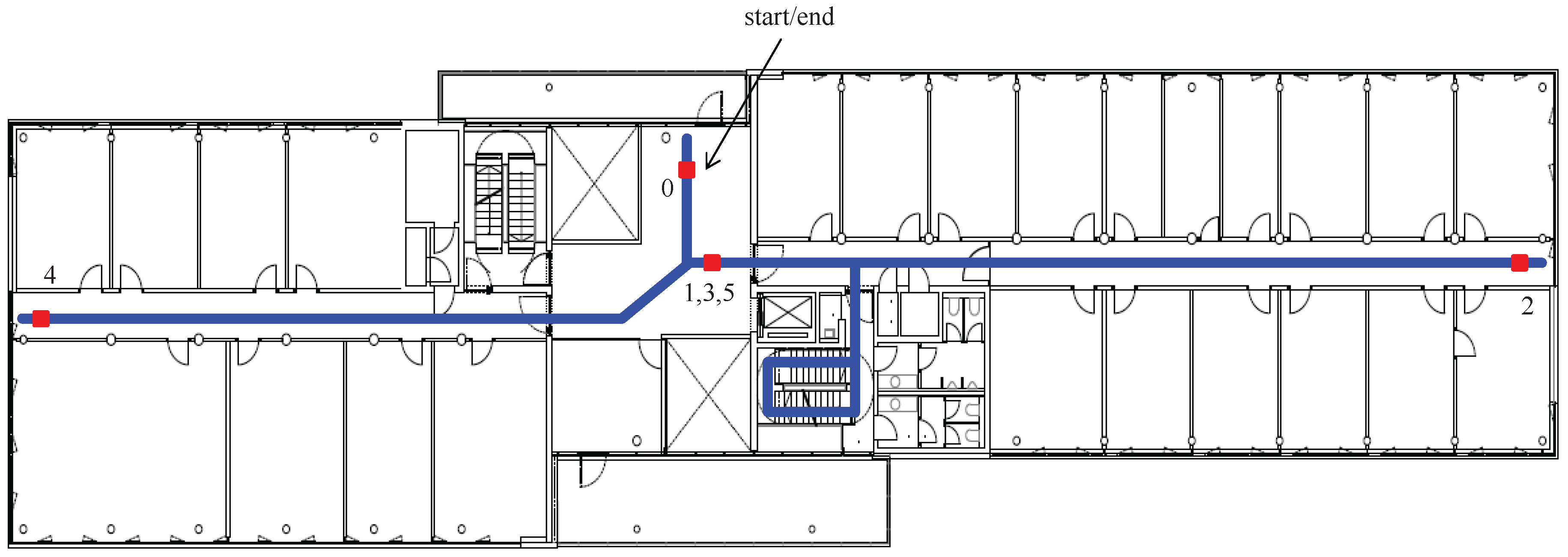
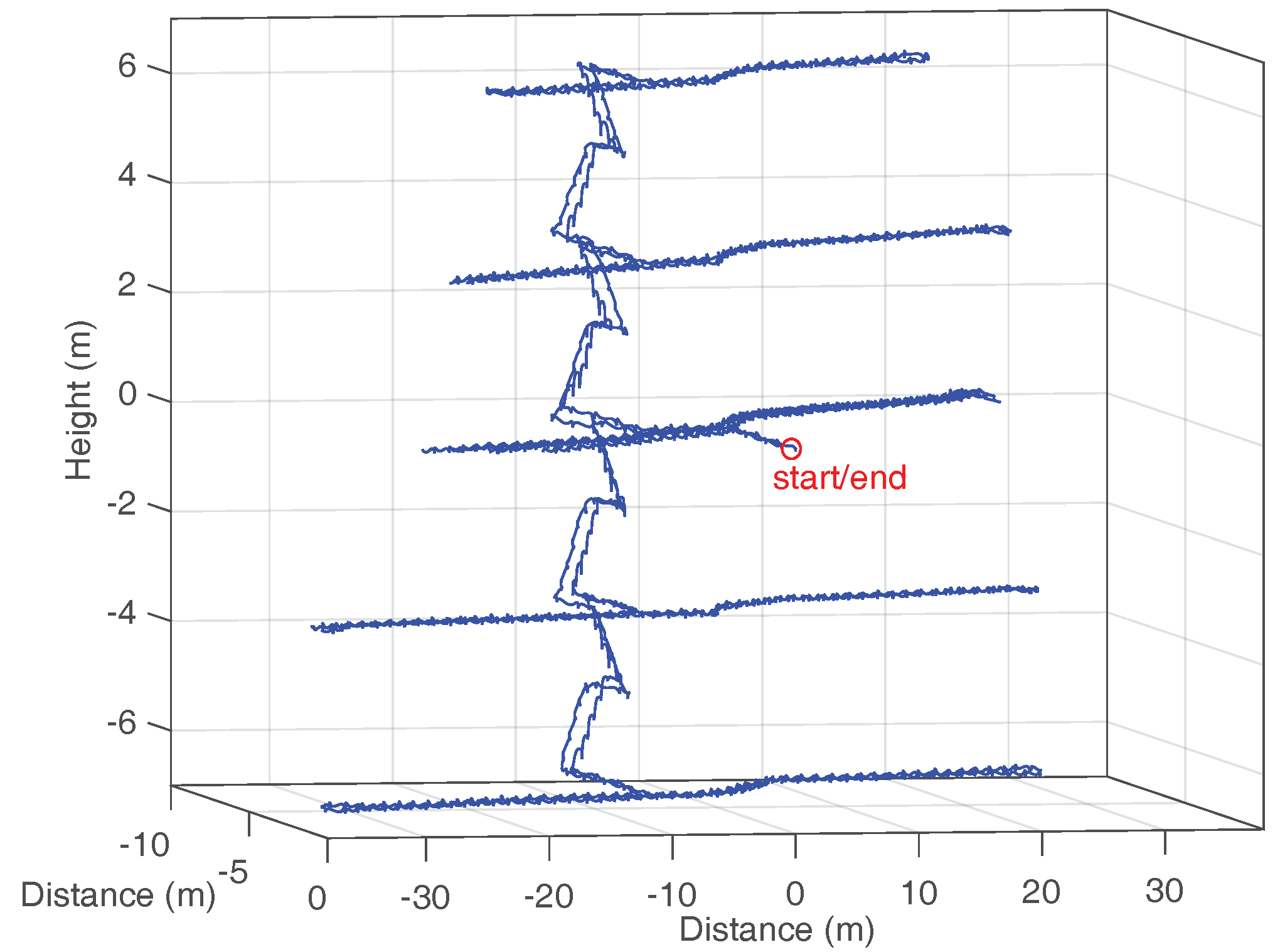
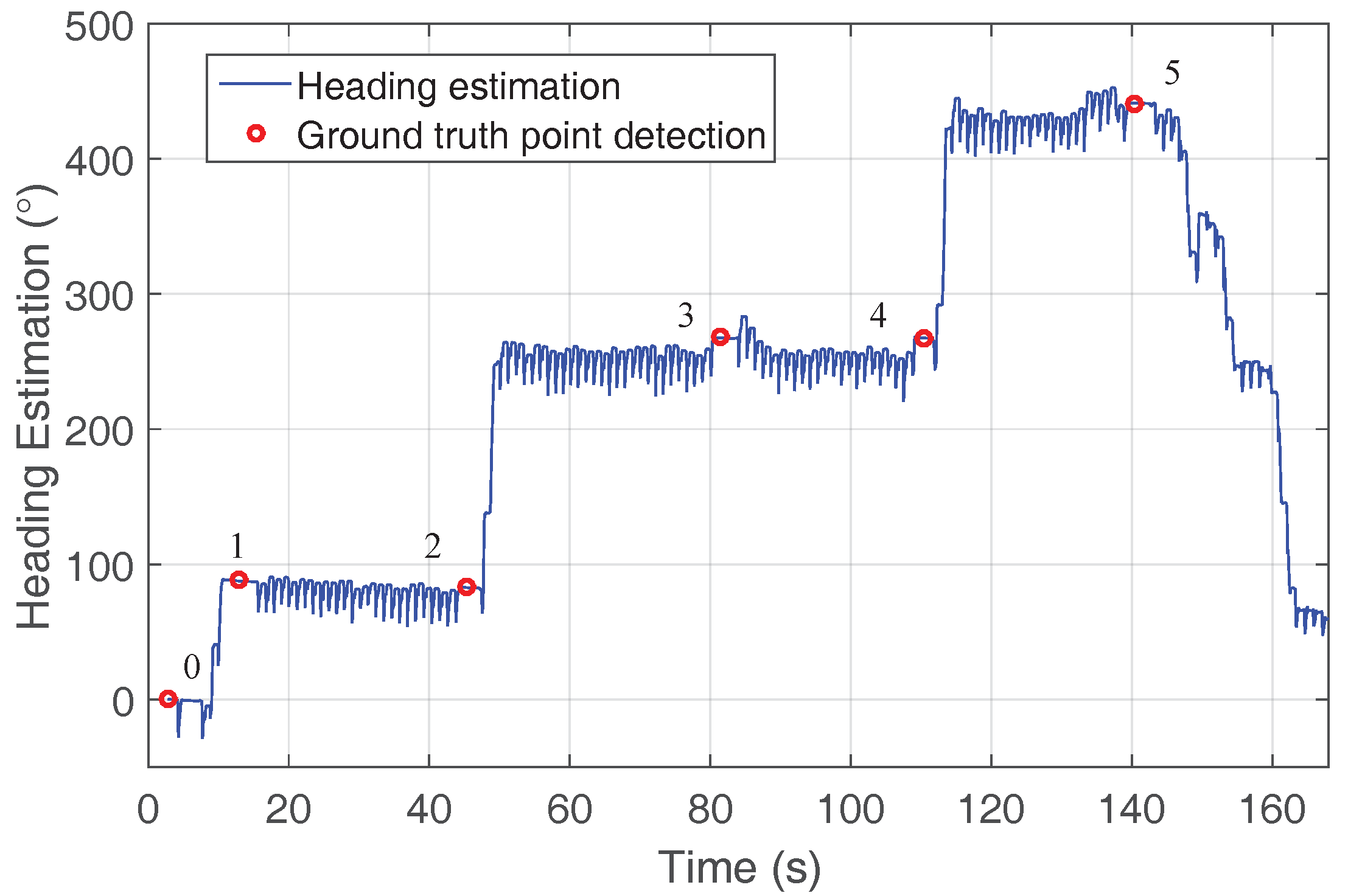
3.1. Data Set and Error Metric
3.2. Performance Evaluation
3.2.1. Error in x- and y-Axes
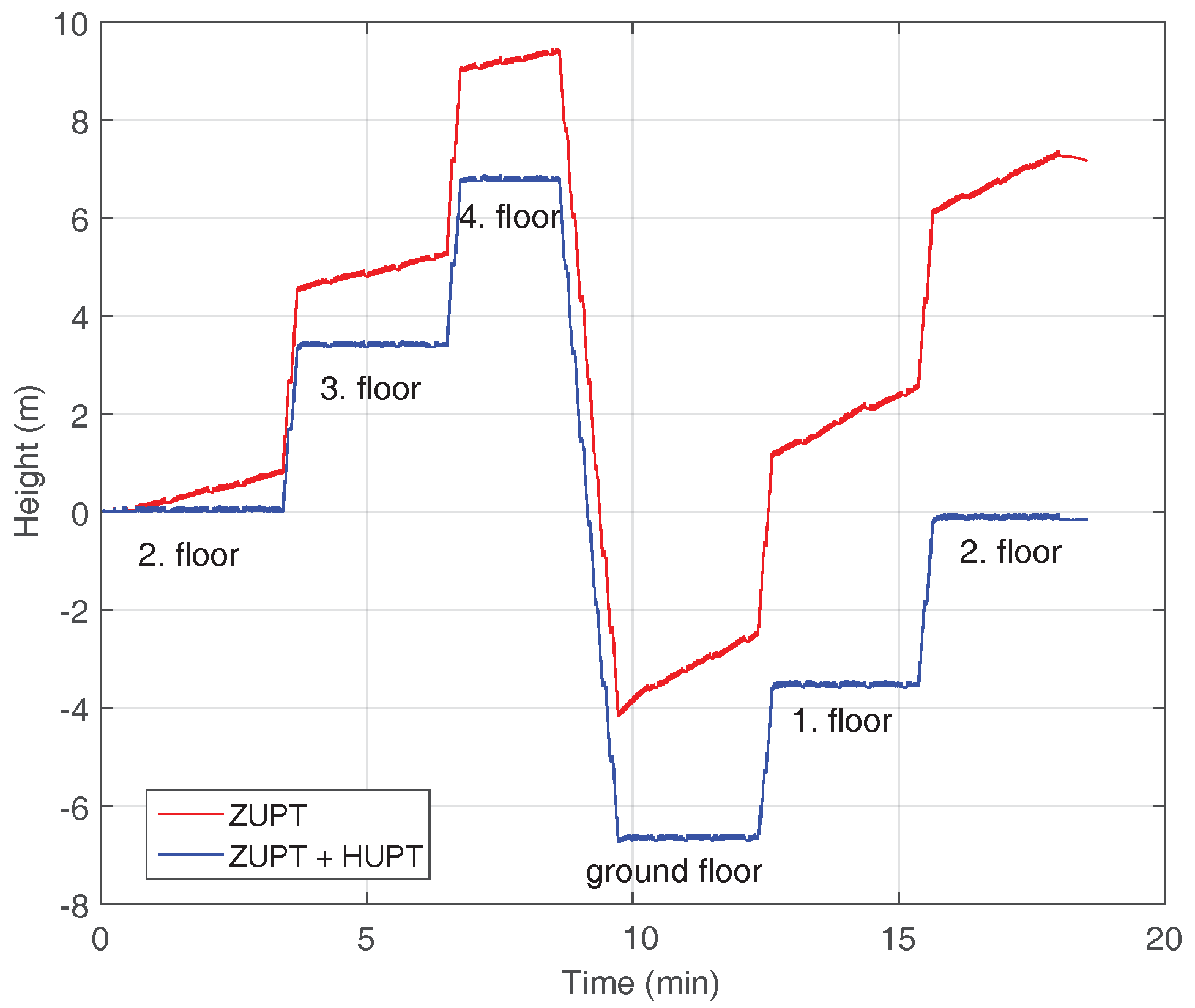
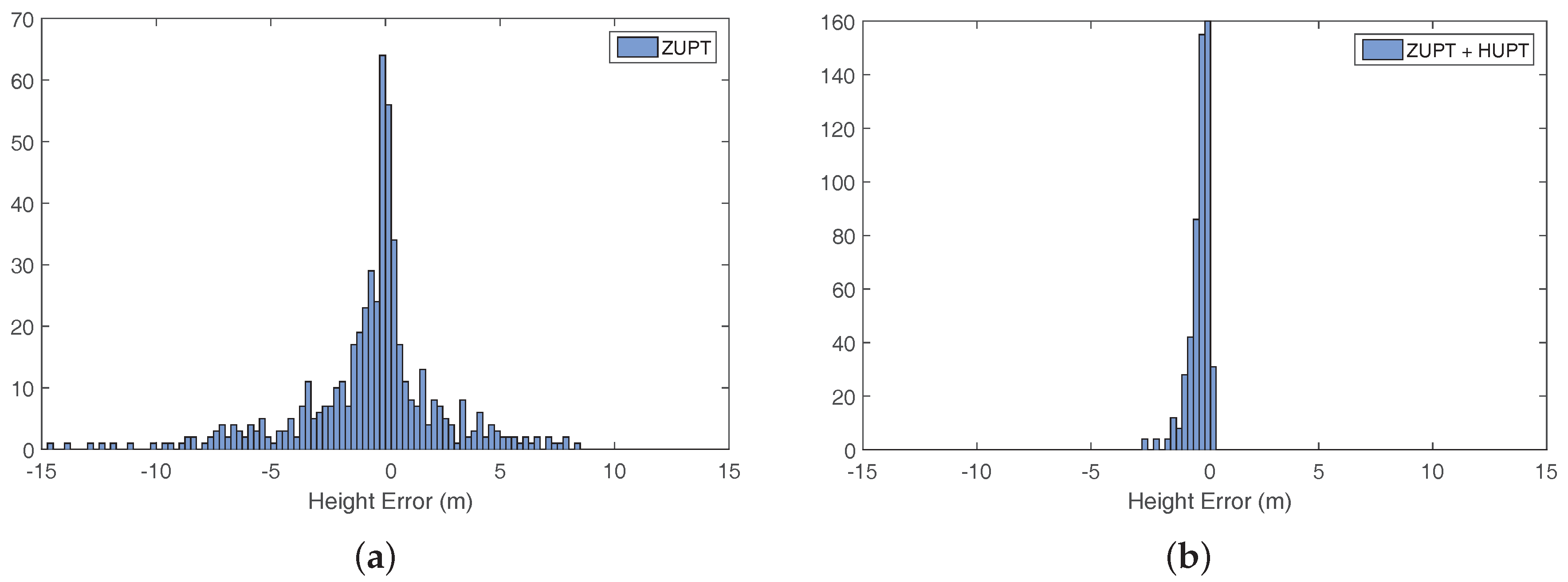
3.2.2. Error in z-Axis
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ojeda, L.; Borenstein, J. Non-GPS Navigation for Security Personnel and First Responders. J. Navig. 2007, 60, 391–407. [Google Scholar] [CrossRef]
- Finker, D.; Kocjan, J.; Rutkowski, J.; Cai, R. Evaluation of an Autonomous Navigation and Positioning System for IAEA Safeguards Inspectors. In Proceedings of the 2014 Ubiquoutous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christ, TX, USA, 20–21 November 2014. [Google Scholar]
- Ojeda, L.; Borenstein, J. Accurate and Reliable Soldier and First Responder Indoor Positioning: Multisensor Systems and Cooperative Localization. IEEE Wirel. Commun. 2011, 18, 10–18. [Google Scholar]
- Correa, A.; Barcelo, M.; Morell, A.; Lopez Vicario, J. A Review of Pedestrian Indoor Positioning Systems for Mass Market Applicaitons. Sensors 2017, 17, 1927. [Google Scholar] [CrossRef] [PubMed]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Using Constraints for Shoe Mounted Indoor Pedestrian Navigation. J. Navig. 2012, 65, 15–28. [Google Scholar] [CrossRef]
- Ruppelt, J.; Kronenwett, N.; Scholz, G.; Trommer, G.F. High-Precision and Robust Indoor Localization Based on Foot-Mounted Inertial Sensors. In Proceedings of the 2016 IEEE/ION Position Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–16 April 2016; pp. 67–75. [Google Scholar]
- Garcia Puyol, M.; Bobkov, D.; Robertson, P.; Jost, T. Pedestrian Simultaneous Localization and Mapping in Multistory Bildings Using Inertial Sensors. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1714–1727. [Google Scholar] [CrossRef]
- Xia, H.; Wang, X.; Qiao, Y.; Jian, J.; Chang, Y. Using Multiple Barometers to Detect the Floor Location of Smart Phones wiht Built-in Barometric Sensors for Indoor Positioning. In Proceedings of the 2015 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015. [Google Scholar]
- Binghao, L.; Harvey, B.; Gallagher, T. Using Barometers to Determine the Height for Indoor Positioning. In Proceedings of the 2013 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Beomju, S.; Chulki, K.; Jaehun, K.; Seok, L.; Cangdon, K.; Hyoung Seok, K.; Taikjin, L. Motion Recognition- Based 3D Pedestrian Navigation System Using Smartphone. IEEE Sens. J. 2016, 16, 6977–6989. [Google Scholar]
- Georgios, P.; Omid, R.M.R.; Dorota, I.; Christian, P.; Urs, H. A Novel Approach for Dynamic Vertical Indoor Mapping through Crowd-Sourced Smartphone Sensor Data. In Proceedings of the 2017 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Moder, T.; Hafner, P.; Wisiol, K.; Wieser, M. 3D Indoor Positioning with Pedestrian Dead Reckoning and Activity Recognition based on Bayes Filtering. In Proceedings of the 2015 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015. [Google Scholar]
- Antigny, N.; Servieres, M.; Renaudin, V. Pedestrian Track Estimation with Handheld Monocular Camera and Inertial-Magnetic Sensor for Urban Augmented Reality. In Proceedings of the 2017 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Shin, B.; Kim, C.; Kim, J.; Lee, S.; Kee, C.; Kim, H.; Lee, T. Motion Recognition-Based 3D Pedestrian Navigation System Using Smartphone. IEEE J. Sens. 2016, 16, 6977–6989. [Google Scholar] [CrossRef]
- Le Scornec, J.; Ortiz, M.; Renaudin, V. Foot-Mounted Pedestrian Navigation Reference with Tightly Coupled GNSS Carrier Phases, Inertial and Magnetic Data. In Proceedings of the 2017 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Munoz Diaz, E.; de Ponte Müller, F.; García Domínguez, J.J. Use of the Magnetic Field for Improving Gyroscopes’ Biases Estimation. Sensors 2017, 17, 832. [Google Scholar] [CrossRef] [PubMed]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Munoz Diaz, E. Inertial Pocket Navigation System: Unaided 3D Positioning. Sensors 2015, 15, 9156–9178. [Google Scholar] [CrossRef] [PubMed]
- Renaudin, V.; Combettes, C.; Marchand, C. Toward a Free Inertial Pedestrian Navigation Reference System. In Proceedings of the 2014 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (m) | (m) | |
|---|---|---|
| ZUPT | 2.10 | 2.59 |
| ZUPT + HUPT | 0.31 | 0.41 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munoz Diaz, E.; Kaiser, S.; Bousdar Ahmed, D. Height Error Correction for Shoe-Mounted Inertial Sensors Exploiting Foot Dynamics. Sensors 2018, 18, 888. https://doi.org/10.3390/s18030888
Munoz Diaz E, Kaiser S, Bousdar Ahmed D. Height Error Correction for Shoe-Mounted Inertial Sensors Exploiting Foot Dynamics. Sensors. 2018; 18(3):888. https://doi.org/10.3390/s18030888
Chicago/Turabian StyleMunoz Diaz, Estefania, Susanna Kaiser, and Dina Bousdar Ahmed. 2018. "Height Error Correction for Shoe-Mounted Inertial Sensors Exploiting Foot Dynamics" Sensors 18, no. 3: 888. https://doi.org/10.3390/s18030888
APA StyleMunoz Diaz, E., Kaiser, S., & Bousdar Ahmed, D. (2018). Height Error Correction for Shoe-Mounted Inertial Sensors Exploiting Foot Dynamics. Sensors, 18(3), 888. https://doi.org/10.3390/s18030888