1. Introduction
With the advances in smart or intelligent structure technology, piezoelectric composites are widely used in structural health monitoring [
1,
2,
3]. These smart devices are sensitive to the influences from the external environment and have extraordinary compatibility with the most popular construction materials used in civil engineering such as cement and concrete. The design and fabrication of composite materials open new avenues for optimizing the electrical, magnetic, and mechanical properties of sensors for specific applications [
4,
5,
6].
According to the different connectivity of each phase in the piezoelectric composite, piezoelectric composites can be divided into 10 basic types such as 0-0, 0-1, 0-3, 2-2 and so on. The first number represents the piezoelectric phase and the second number represents the non-piezoelectric phase. A 2-2 cement-based piezoelectric composite is the composite where a two-dimensional piezoelectric plate is embedded in a two-dimensional cement matrix [
7]. Li and Zhang fabricated 2-2 cement-based piezoelectric composites using hardened Portland cement and studied the sensing performance of such composites at low frequency [
8]. Investigation of the dielectric and acoustic impedance properties of 2-2 barium zirconate titanate-Portland cement composites reveals that the composites have higher piezoelectric voltage coefficients and lower acoustic impedance values than pure ceramic [
9]. Cheng et al. studied the effects of composite thickness on the dielectric, piezoelectric and electromechanical properties of the composite [
10]. The receiving piezoelectric transducer can be fabricated by decreasing the thickness. Moreover, mathematical models to describe the deformation and electrical behaviors have also been studied by numerous researchers. For example, based on the theory of elasticity, static analyses of piezoelectric curved composites and multi-layered piezoelectric cantilevers were performed by Zhang et al. [
11,
12,
13,
14], who further established an analytical model of the dynamic properties of the 2-2 cement-based piezoelectric transducer subjected to a uniformly distributed harmonic load and external harmonic electrical potential [
15]. Chen et al. analyzed the free vibration of laminates beams by using the state space method and the differential quadrature method [
16]. Wang and Shi presented the dynamic behaviors of piezoelectric composite stack transducers and discussed the influence of the electrode thickness on their dynamic characteristics [
17].
Few of the published papers have studied the dynamic performance of piezoelectric composite sensors subjected to impact loads, especially the theoretical aspect. Zhang et al. studied the dynamic properties of piezoelectric structures subjected to simpact load and gave theoretical solutions of the mechanical and electrical behaviors of the piezoelectric structures [
18]. Yin et al. presented a mixed finite element formulation for modelling the behavior of a piezoelectric composite and analyzed the response of distributed sensors made of PVDF film when the composite was subjected to low velocity impacts [
19]. Ueda studied the transient response of a functionally graded piezoelectric material strip with a vertical crack under the action of normal impacts [
20,
21]. In many engineering applications, piezoelectric composite may experience transient dynamic loads, which could induce certain hidden damages (matrix cracking, fiber breakage, etc.). It is therefore important to understand the dynamic behaviors of cement-based piezoelectric sensors.
In the present study, we aim to provide a mathematical model to describe the impact mechanical response of a 2-2 cement-based piezoelectric composite subjected to impact load. The fundamental equations and wave equations are summarized in
Section 2 based upon piezo-elasticity. In the following section, the vibration behaviors of the composite are obtained by using the mode summation method and the principle of virtual work. In
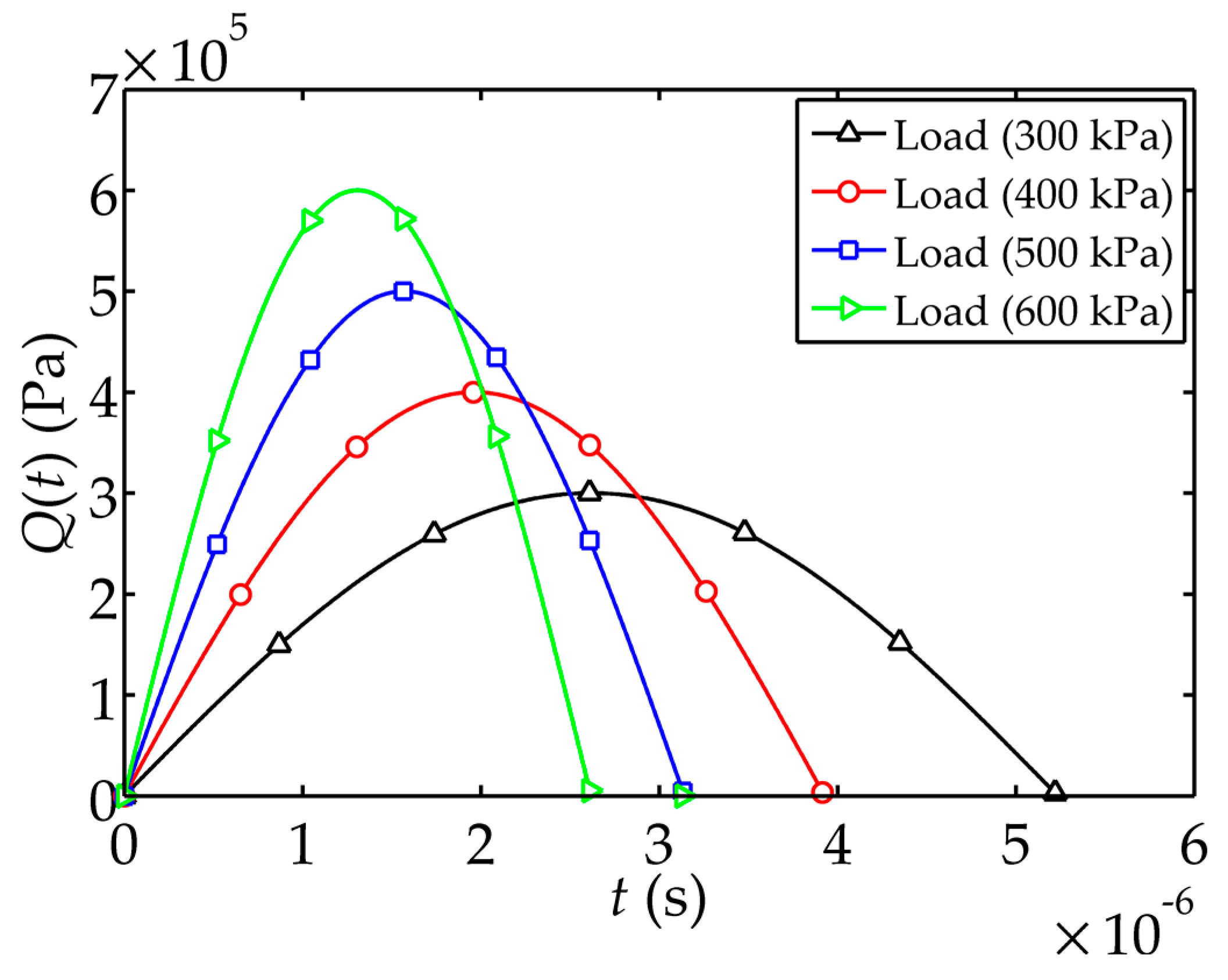
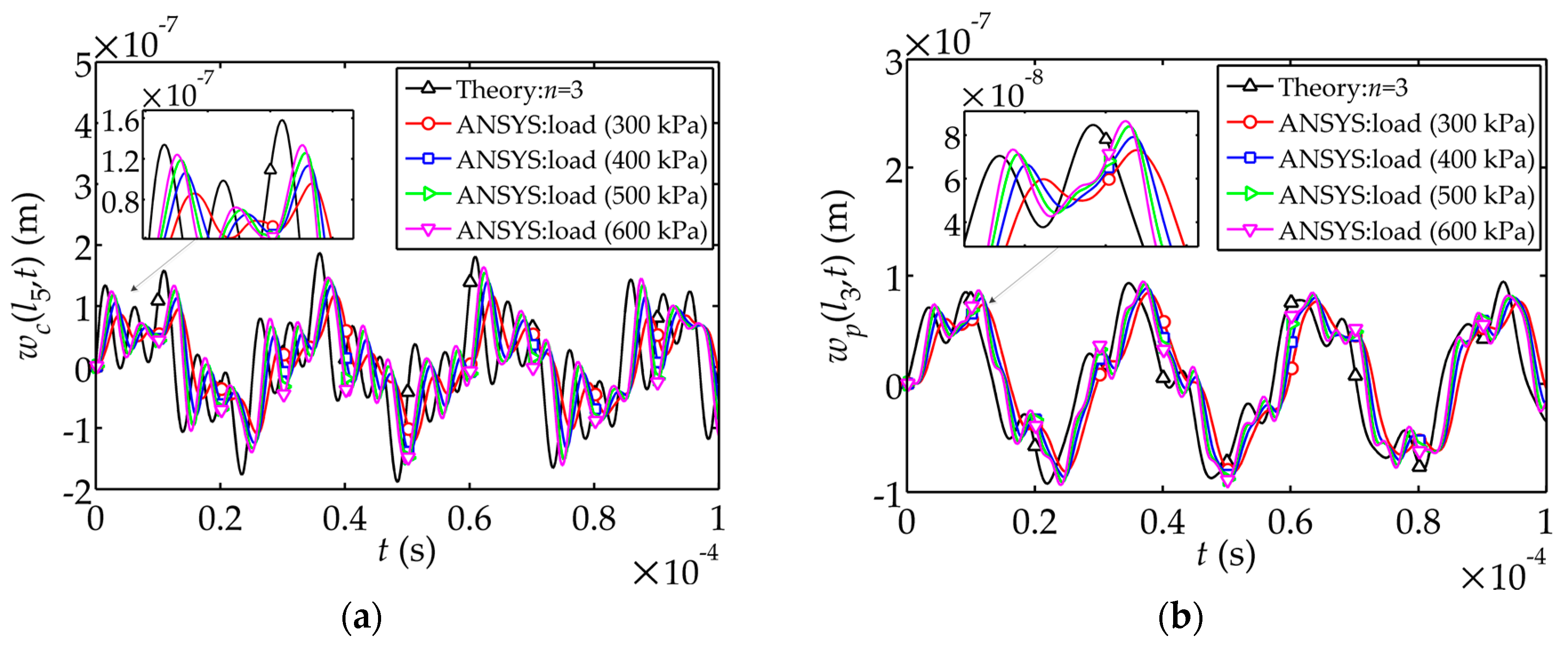
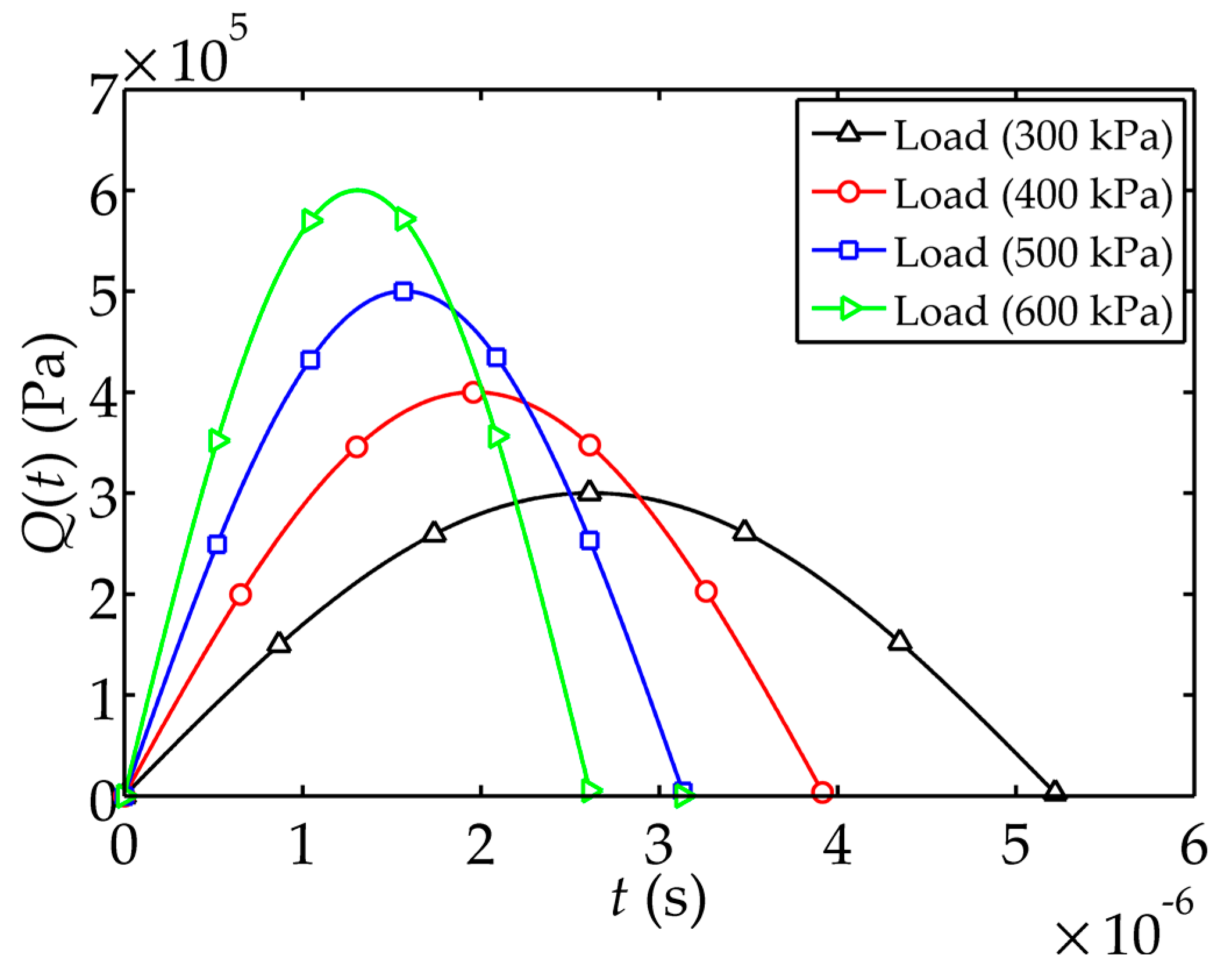
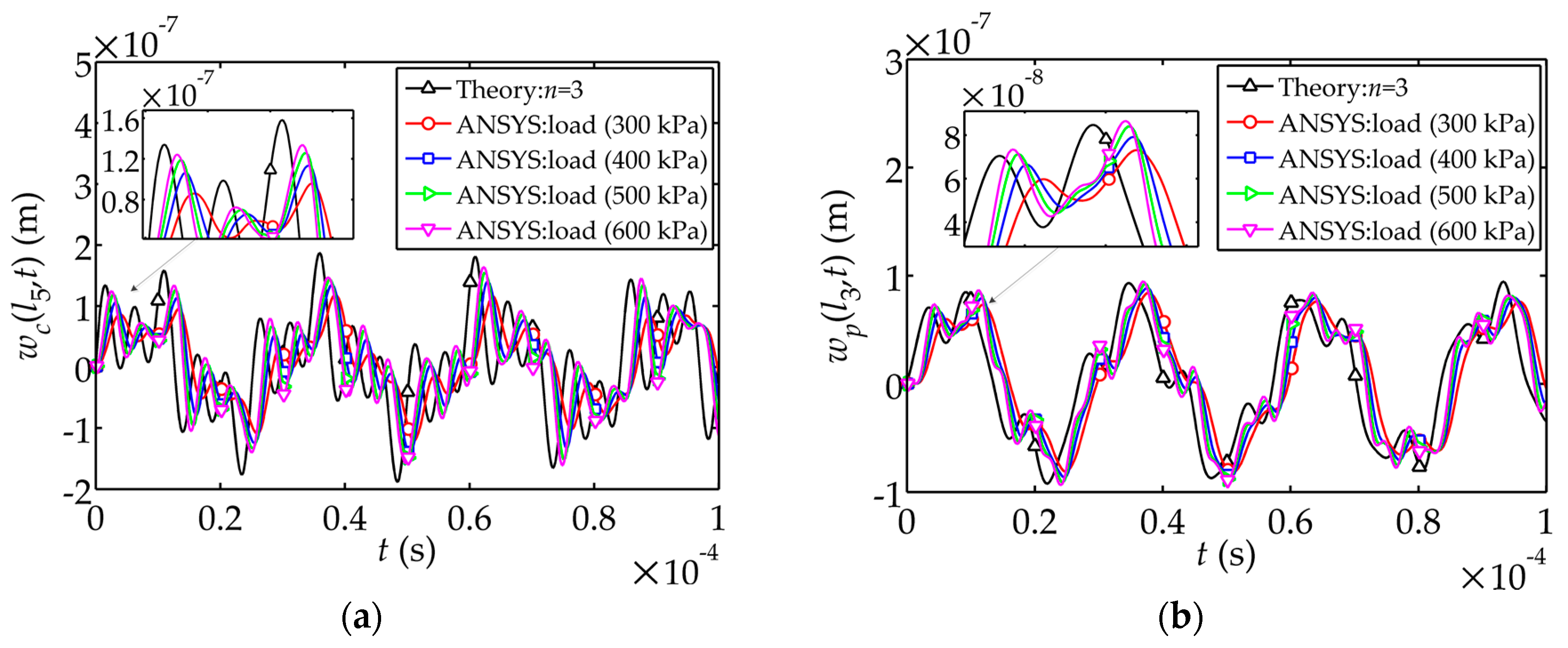
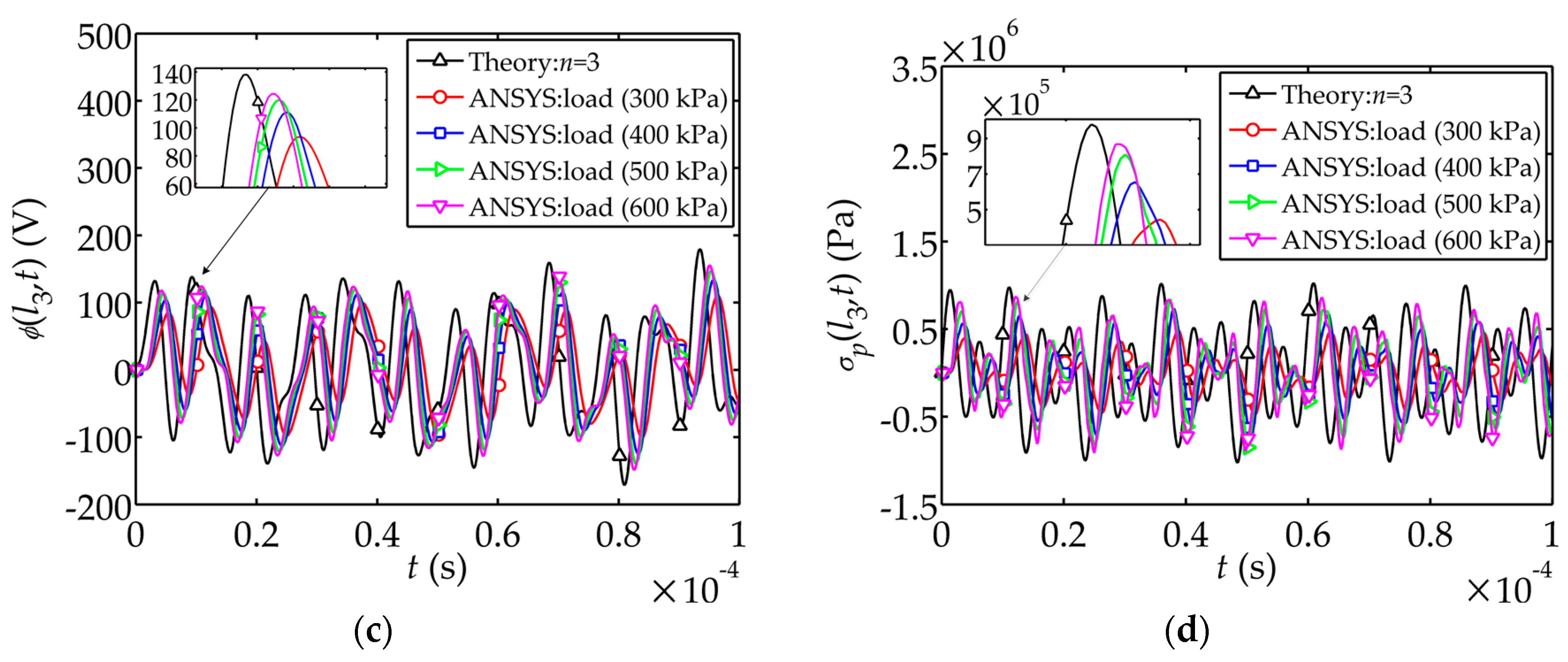
Section 4, the transient harversine wave load is used for the numerical simulation. The numerical results verified the analytical solutions. Moreover, the influence of the material and geometrical parameters on mechanical and electrical behaviors of sensor is discussed. It can be seen that the proposed model would provide guidance for sensor structure design, material selection and impact load design in simulations and experiments.
2. Basic Equations
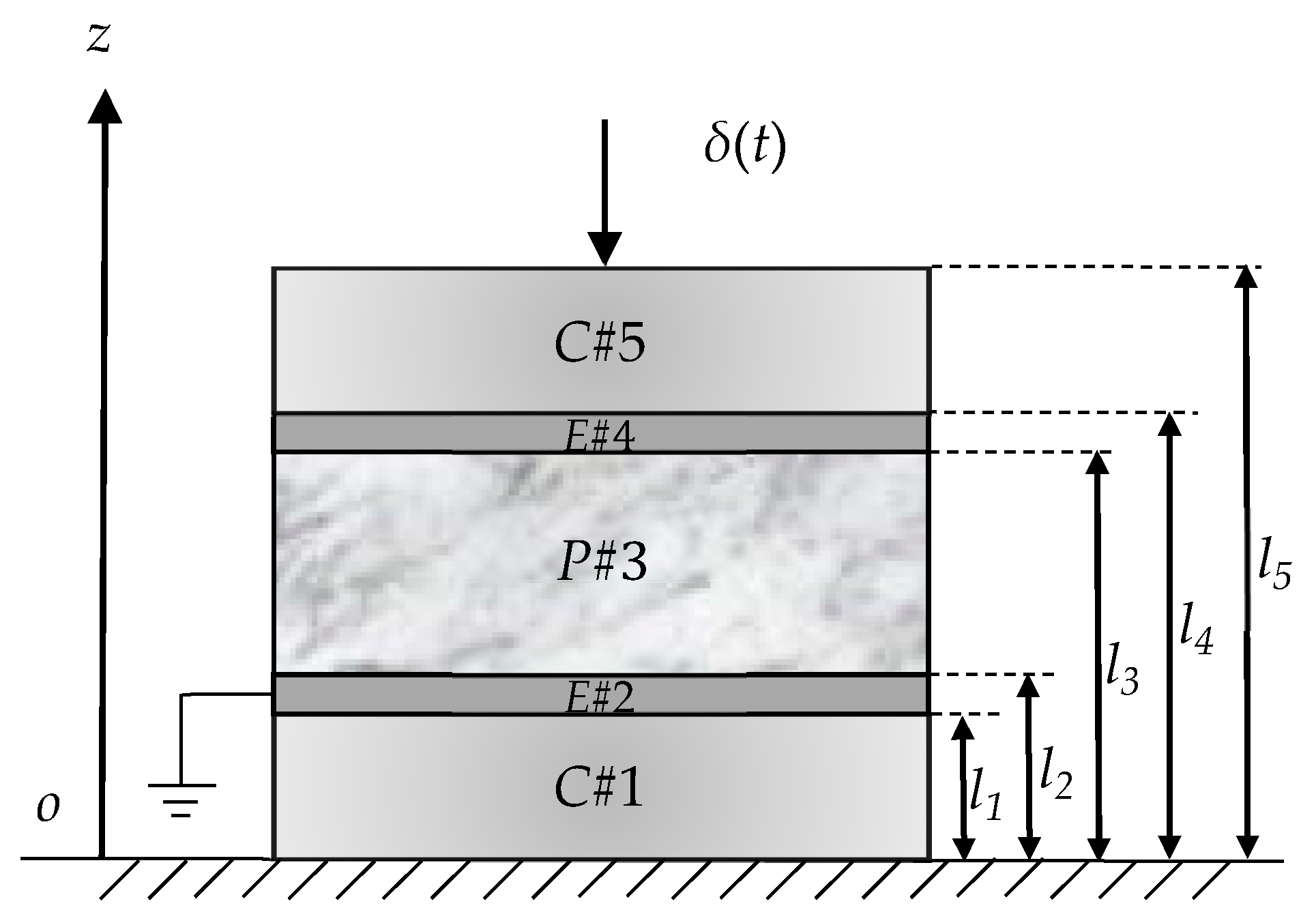
The 2-2 cement-based piezoelectric sensor consists of a piezoelectric layer
, elastic electrode layers
,
and cement layers
,
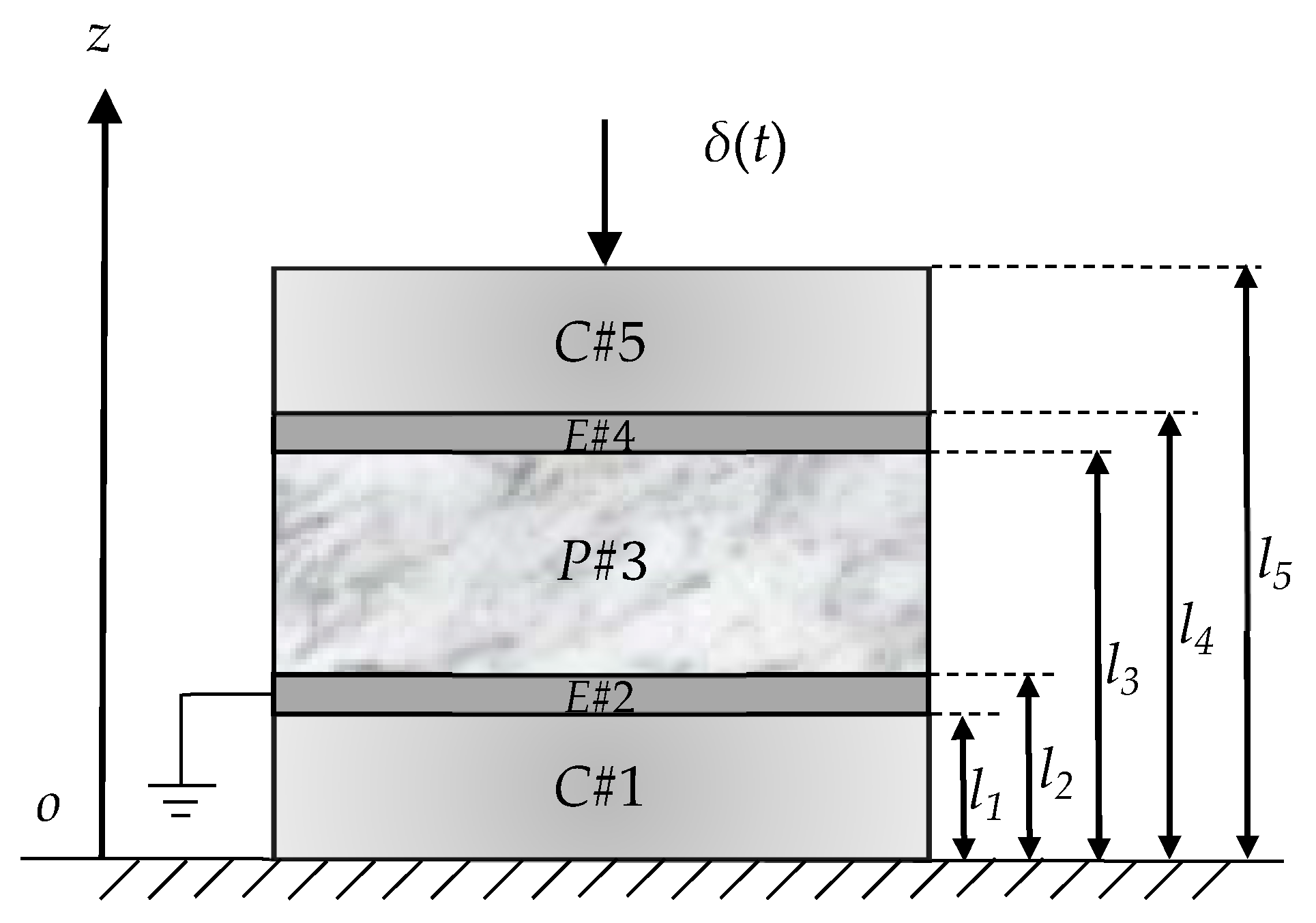
, which are arranged in an alternating manner as shown in
Figure 1.
The thickness of layer
are determined by
(
). The composite is excited longitudinally by the impact load
at its free end. The piezoelectric layer is polarized along its thickness direction and the electrode surface is perpendicular to the thickness direction of the piezoelectric layer. In order to analyze the transient phase of the composite vibration, the following assumptions are adopted: (1) all of the constitutive materials are linear and the deformations are small; (2) one-dimensional assumption. When the composite is deformed, the cross-section maintain a plane and the axial stress is uniformly distributed on the cross-section; (3) damping is not considered. For the piezoelectric layer
, the body force and body charge are neglected, the governing equations can be expressed as follows:
where
,
and
are the stress, strain, and displacement of the piezoelectric layer
along
z-direction, respectively.
and
represent the electric displacement and electric potential in the along
z-direction.
and
are the elastic stiffness coefficient, piezoelectric coefficient and permittivity coefficient of the piezoelectric material, respectively.
is the density of the piezoelectric material. Combining Equations (1) and (2), the following equation are obtained:
Combining Equation (3), one gets the following wave equation:
where
,
.
represents the propagation velocity of the vibration wave in the piezoelectric material.
For the cement layer
, the body charge are neglected, and the basic equations can be expressed as follow:
where
,
and
are the stress, strain, and displacement of the cement layer
along
z-direction, respectively.
and
are the elastic stiffness coefficient and density of the cement material. Combining Equation (5), one gets the following wave equation:
where
and represents the propagation velocity of the vibration wave in the cement material.
For the elastic electrode layer
the body charge are neglected, and the basic equations can be expressed as follow:
where
,
and
are the stress, strain, and displacement of the elastic electrode layer
along
z-direction, respectively.
and
are the elastic stiffness coefficient and density of the elastic electrode material. Similarly, wave equation can be easily obtained:
where
and represents the propagation velocity of the vibration wave in the elastic electrode material.
3. Accurate Vibration Analysis of 2-2 Cement Based Piezoelectric Composite
Figure 1 shows the 2-2 cement-based piezoelectric composite sensor subjected to the impact load. In order to obtain the accurate vibration solution, we use the mode summation method and the principle of the virtual work in this section. It is assumed that the solutions for the displacements are:
where
,
and
are normal modes of the cement, piezoelectric and elastic electrode layers for the longitudinal vibration.
is the function of
t which can be determined by the initial conditions.
Substituting the above equations into Equations (4), (6) and (8), we obtain:
where
are eigenvalues.
By solving Equation (10), the solutions of the normal modes are shown as follow:
where
and
will be determined by the boundary conditions.
In order to solve
and
, the boundary and connecting conditions are written as (including the electrical boundary conditions and the initial conditions):
Substitution of Equation (9) into Equation (13) leads to:
By combining Equations (11), (13b,c) and (14a–c), one obtains the following relation:
Substitution of Equation (12) into Equation (14) leads to the following equations:
here
2, 3, 4, and correspondingly
.
By solving the linear Equation (16b,c) with two unknowns, the expressions of
and
are obtained:
here
2, 3, 4 and we assume that
.
It should be noted that when
4, there are three linear Equation (16b–d) with two unknowns:
Nonhomogeneous equations have nontrivial solutions, which requires:
By solving the above determinant, we obtain the following equation:
where
.
Based on Equation (15), we define:
By combining Equation (21), one obtains:
where
,
,
.
By substituting Equation (22) into Equation (20), the value of
is given by:
After we obtain the value of by Equation (23), , , , , and can be obtained by Equation (21a).
To solve the expressions of
in Equation (9), we consider the initial condition of the sensor. By substituting Equation (9) into Equation (13f–h), we have:
At
, there are three forces, namely the inertia forces, the elasticity force due to the deformation in each element of the composite, and the impact force
loaded at the free end. By taking any displacement
satisfying the boundary and connecting conditions as a virtual displacement, according to Equation (12),
can be given as follows:
The virtual work
of the inertia force on the virtual displacement is expressed as follows:
By substituting Equations (9) and (25) into Equation (26),
can be obtained as:
where
,
1, 2, 3, 4, 5.
The virtual work
of the elastic force on the virtual displacement is expressed as follows:
By substituting Equations (9) and (25) into Equation (28),
can be obtained as:
In order to obtain the virtual work
of the impact load
by substituting
into Equation (25b) to obtain the virtual displacement at the free end,
is expressed as:
Summation of
,
and
gives the total virtual work, equating it to zero:
Substituting Equations (27), (29) and (30) into Equation (31), one obtains:
where
and the Dirac function
can be expressed as:
Writing the solution of the Equation (32) in the form of the Duhamel’s integral, one obtains:
Therefore, the accurate vibration analysis of the 2-2 cement-based piezoelectric composite sensor excited by the impact load can be obtained as:
Displacement functions:
where
;
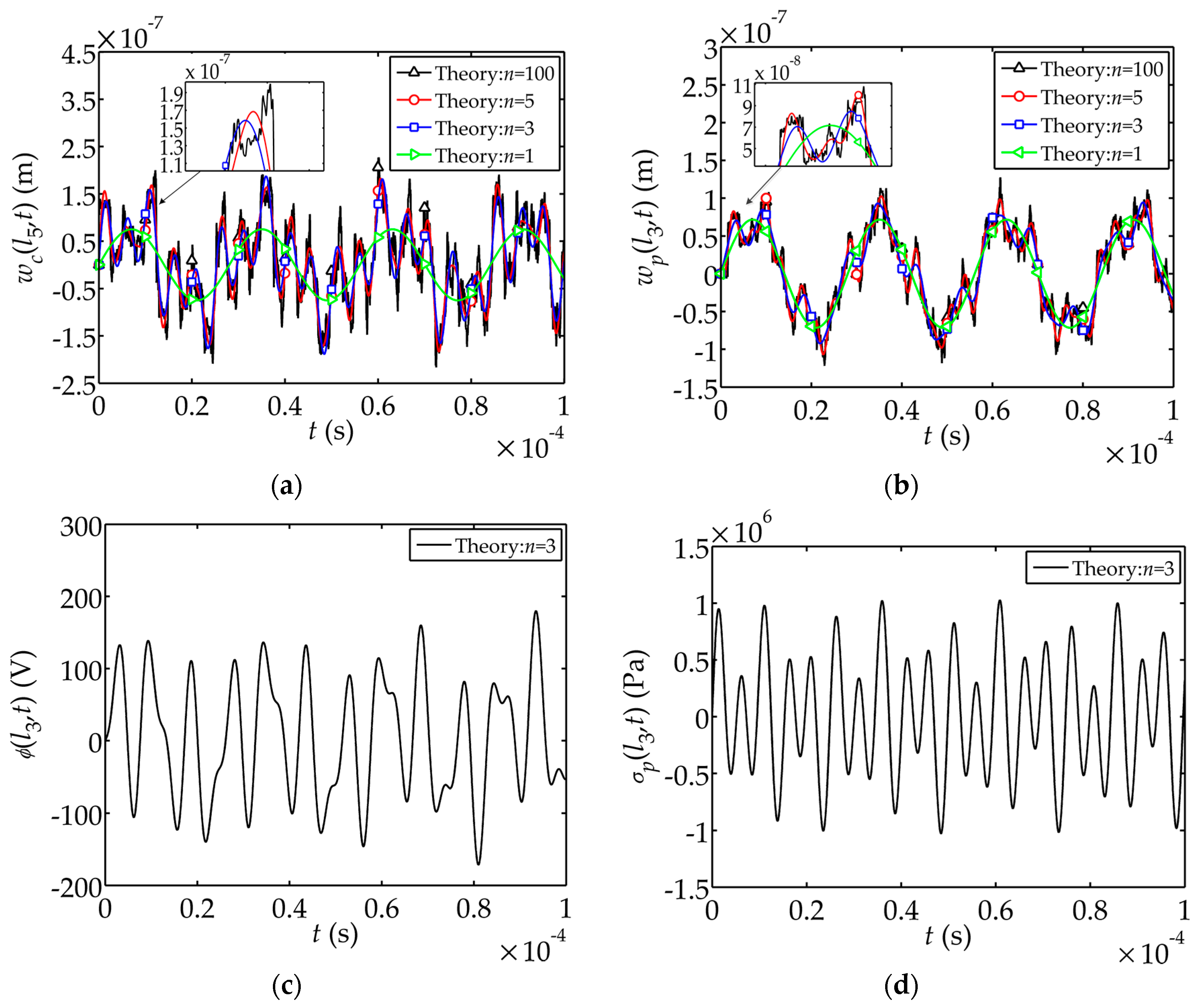
The electric potential of the piezoelectric layer:
Electric field intensity of piezoelectric layer:
Till now, all the mechanical and electrical solutions have been obtained by using the mode summation method and the principle of virtual work.
5. Conclusions
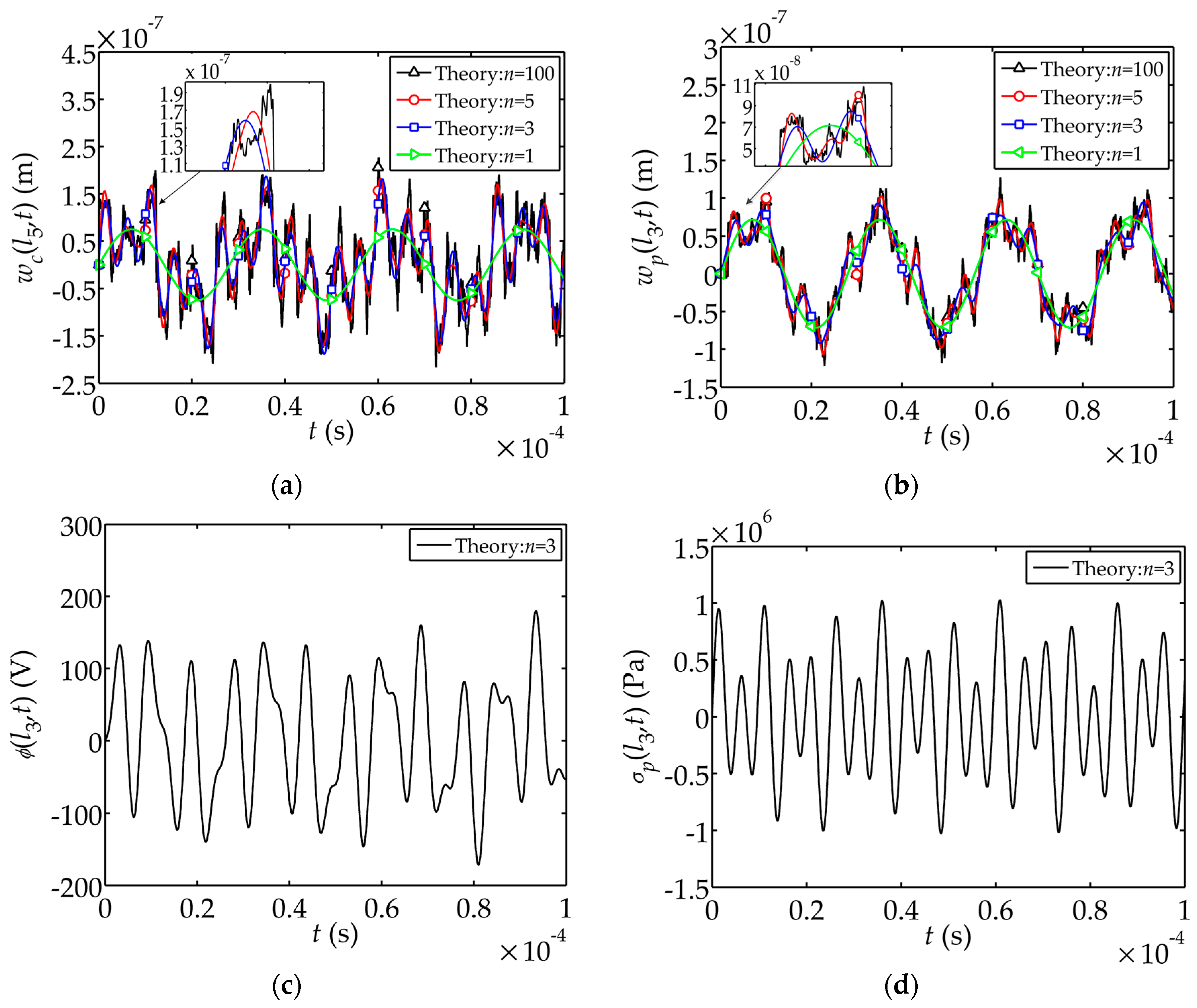
Based on the theory of piezo-elasticity, an accurate mechanical and electrical analysis of the 2-2 cement-based piezoelectric sensor are presented in this paper. Theoretical solutions are obtained with the mode summation method and the principle virtual work. Through comparisons with numerical solutions, the following conclusions can be drawn:
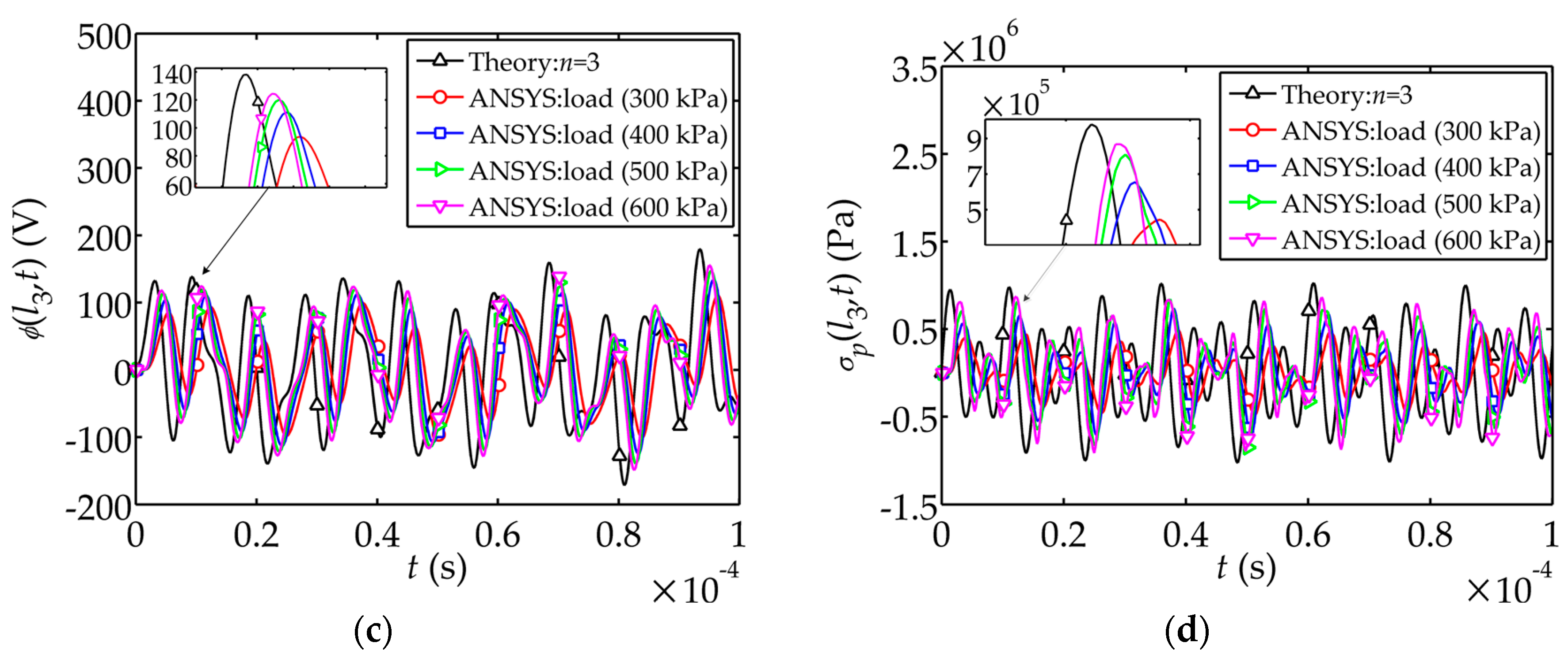
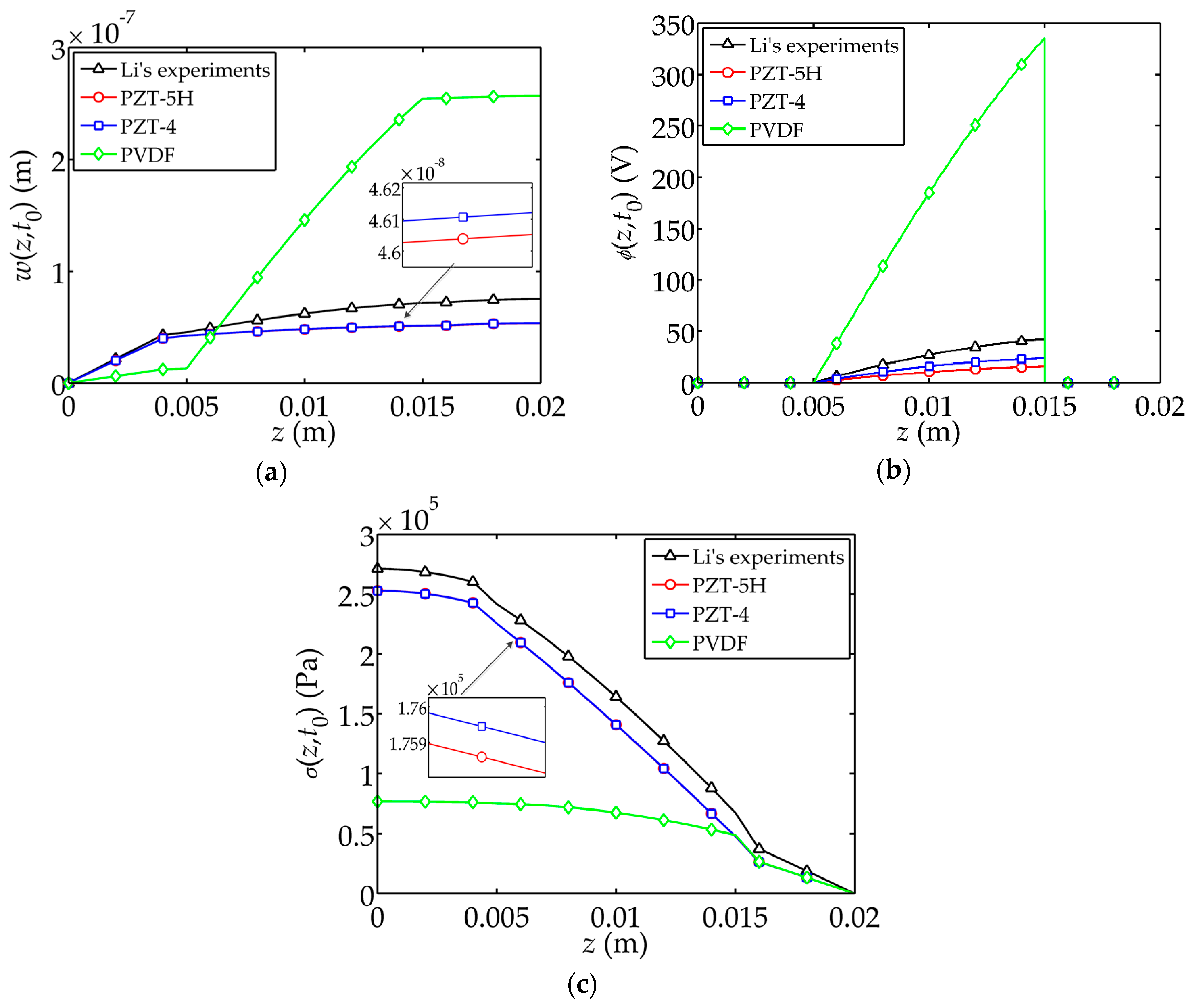
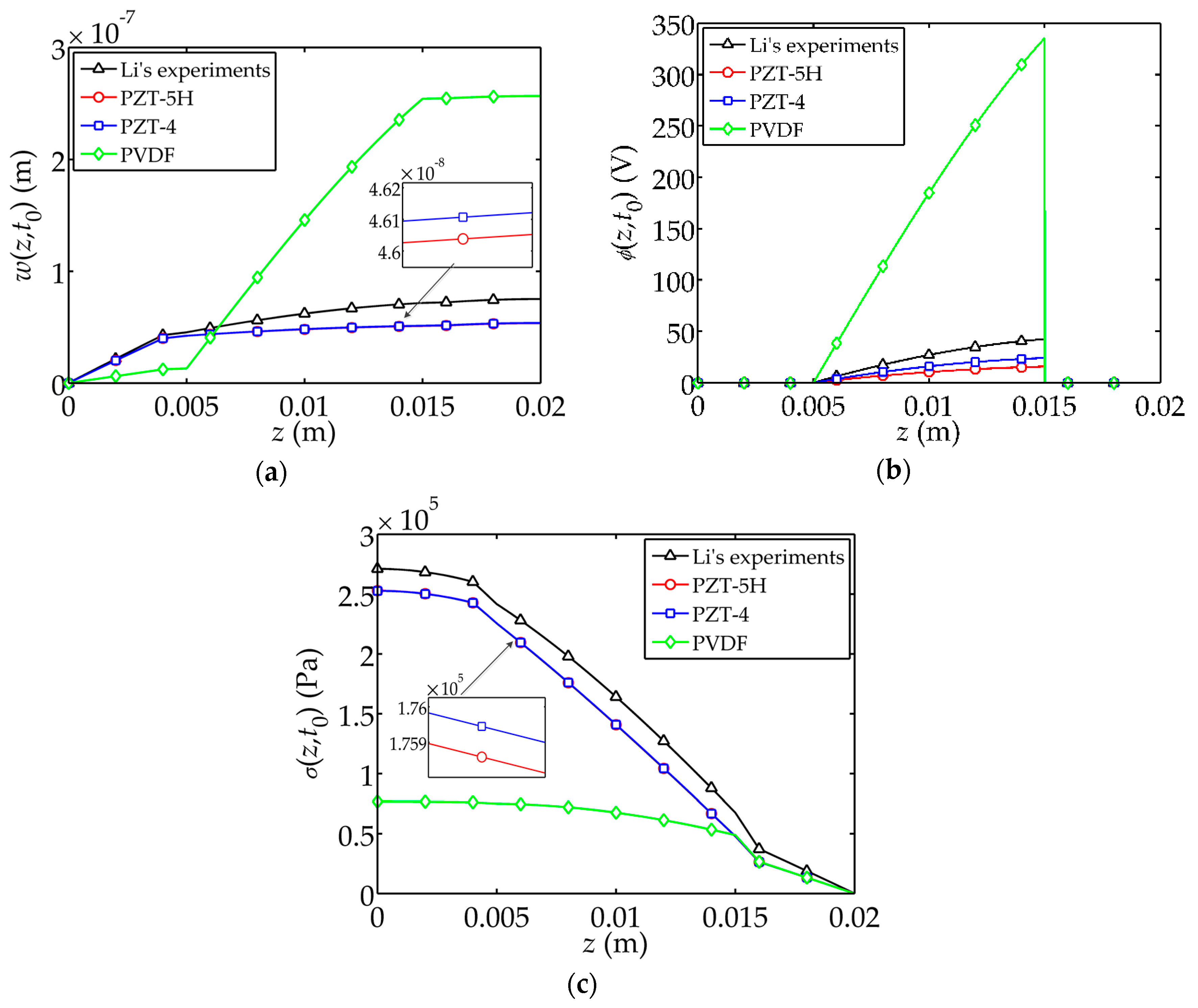
(1) For theoretical solutions, the vibration modal curves of the sensor subjected to the impact load have no obvious change after the addition of high-order modes. It’s sufficient to analyze and summate the first three modes. Numerical simulations have good agreement with the theoretical solutions when the peak value of impact load is larger than 500 kPa.
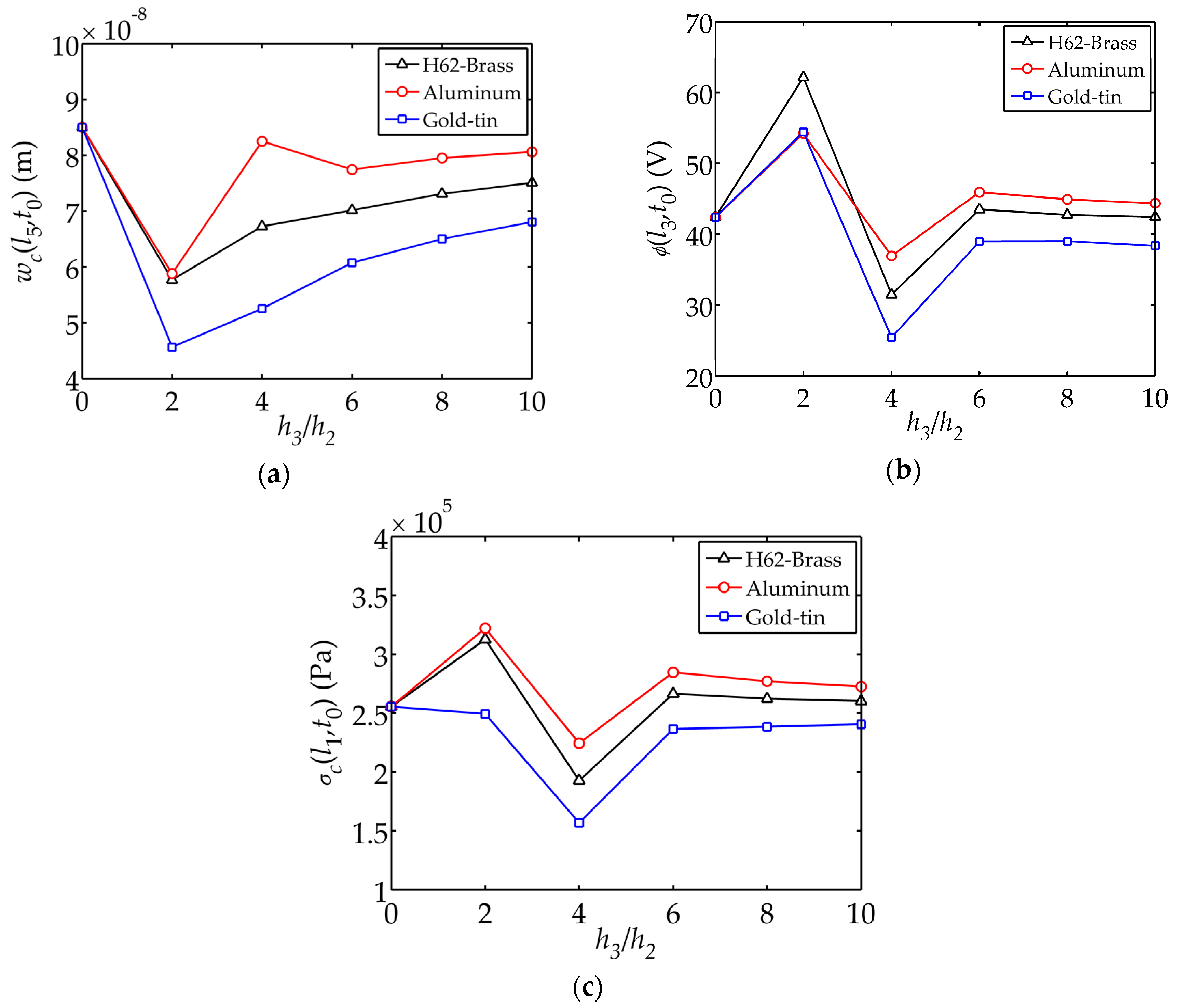
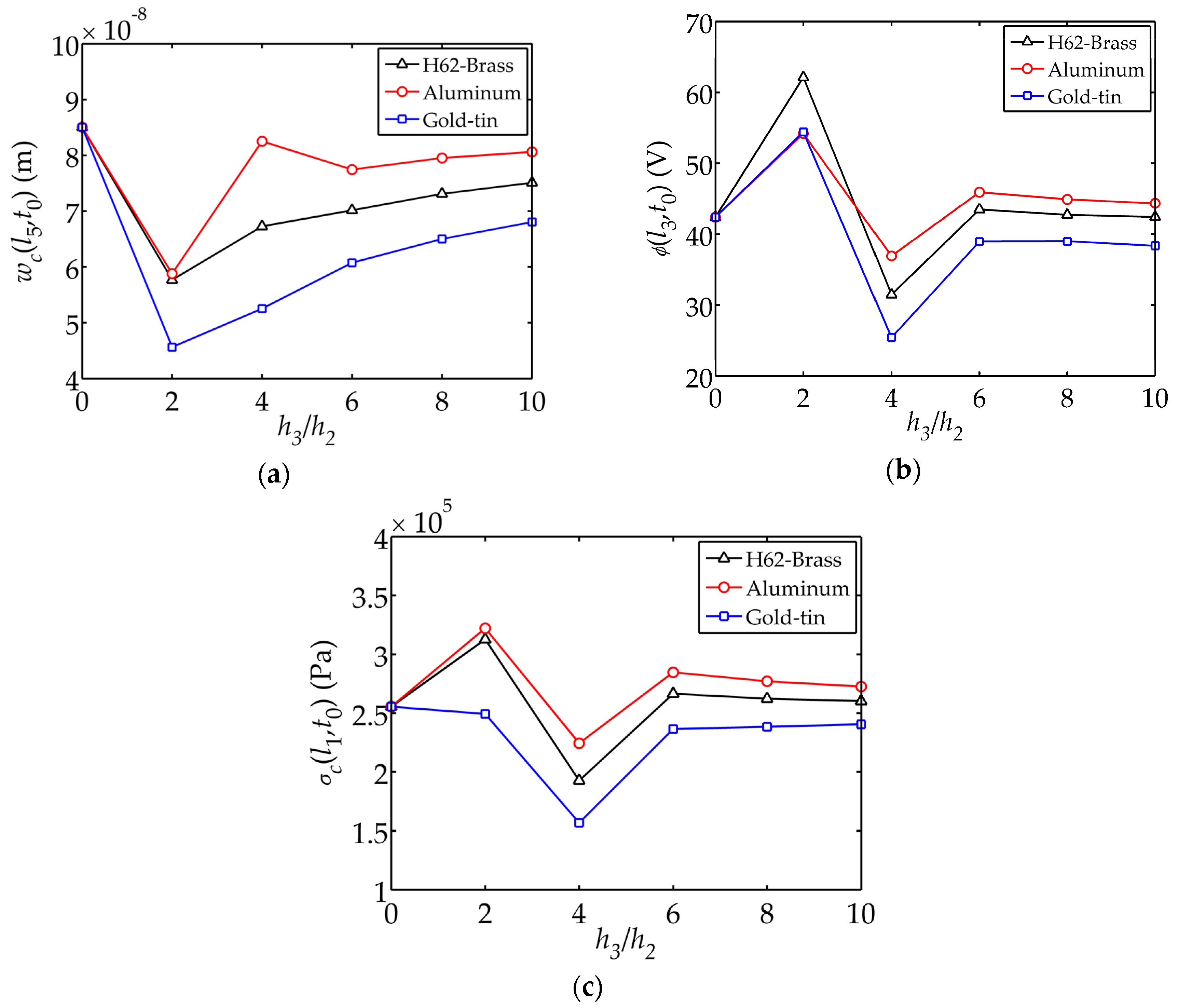
(2) By keeping the total thickness of the sensor and the thickness of piezoelectric layer constant, the sensor shows good mechanical properties with a thickness ratio and good electrical property with a thickness ratio . Aluminum as the elastic electrode material has a relatively large impact on the tip displacement, electric potential and internal stress.
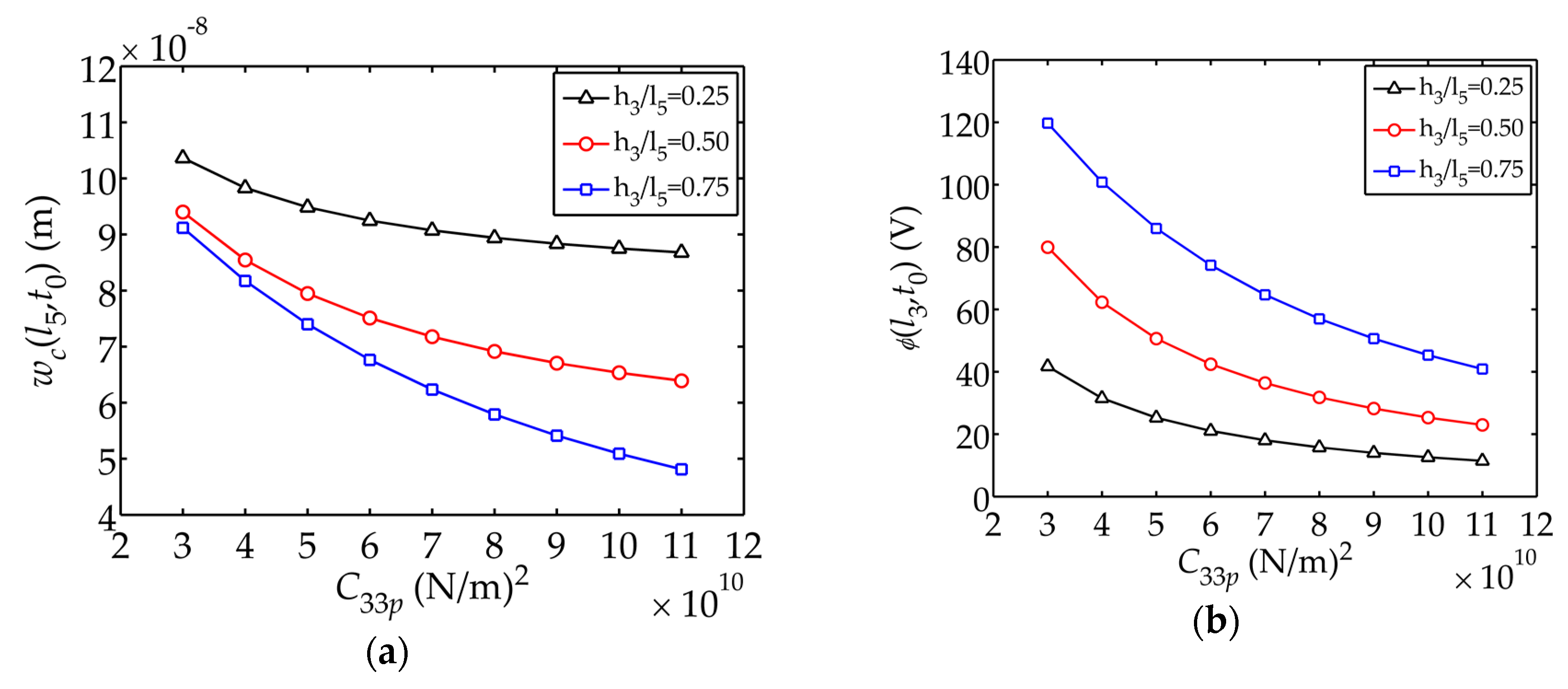
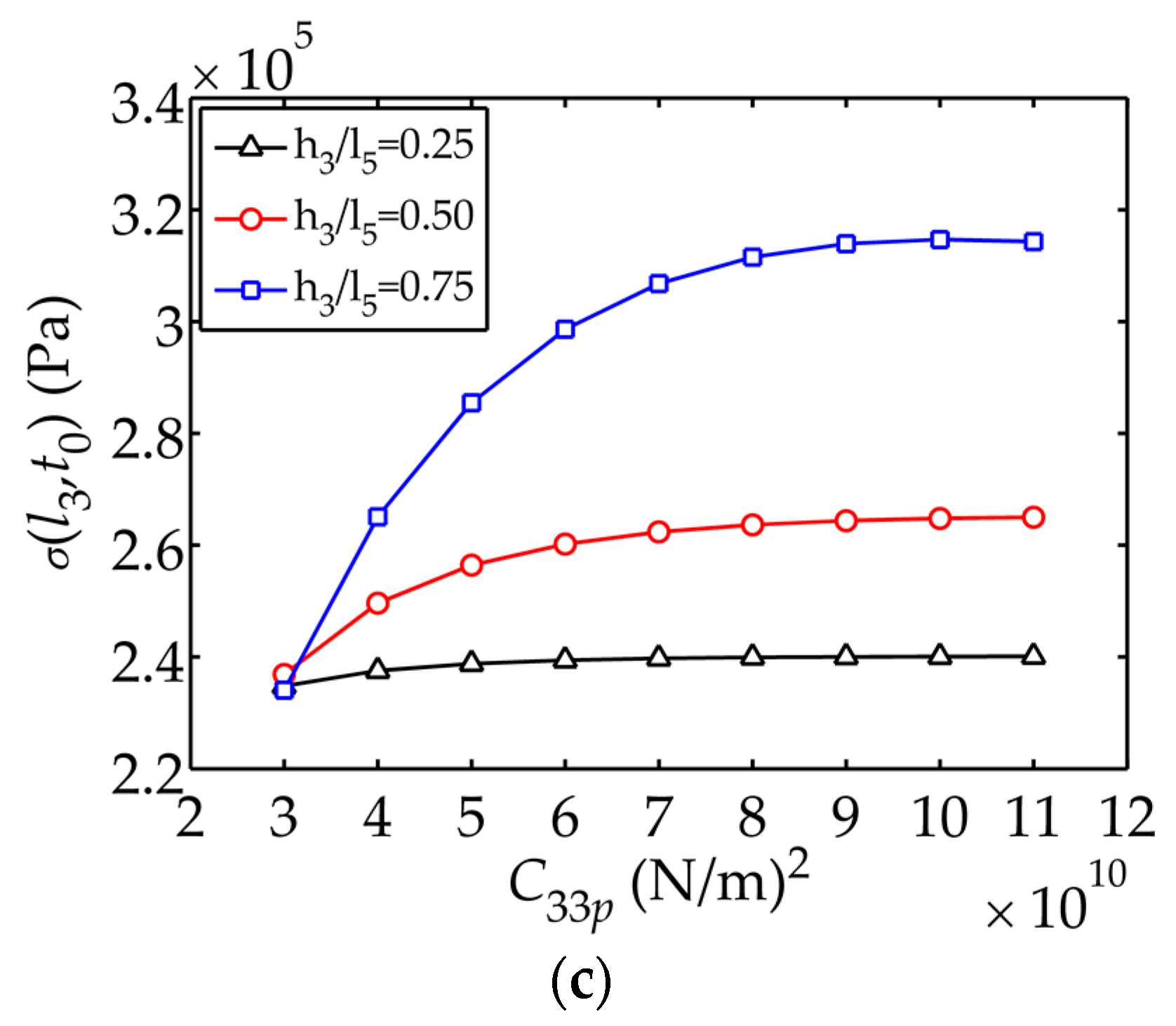
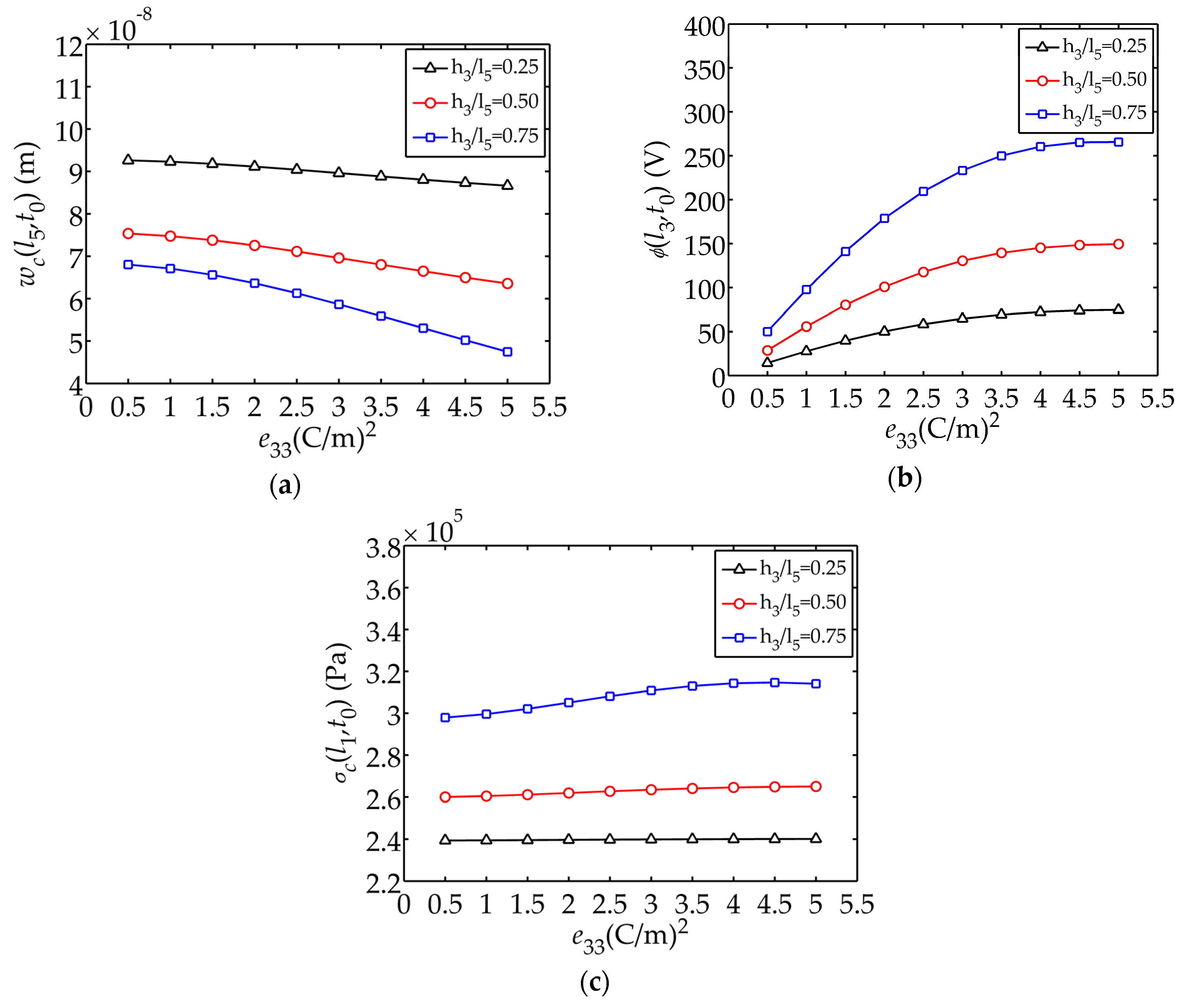
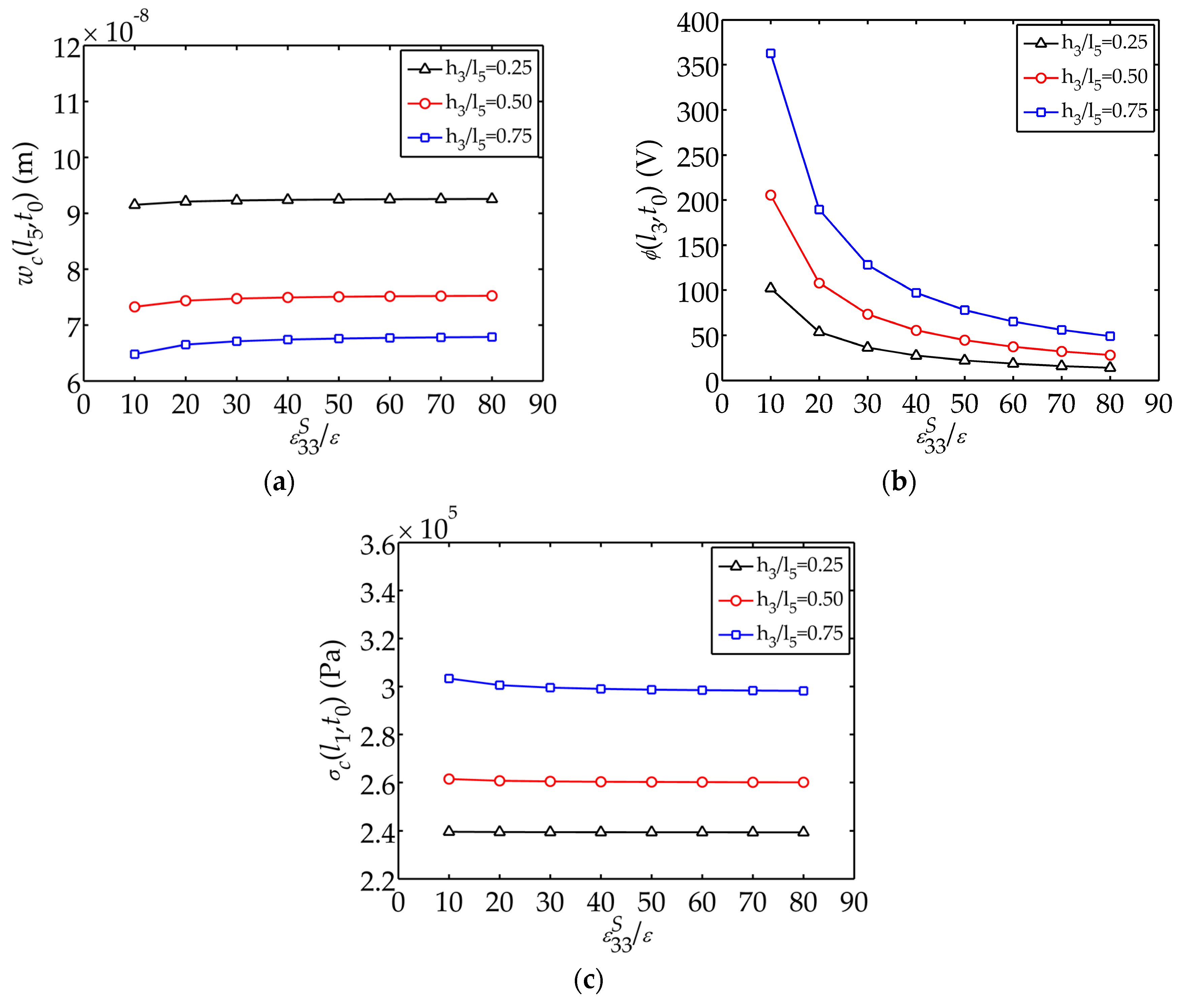
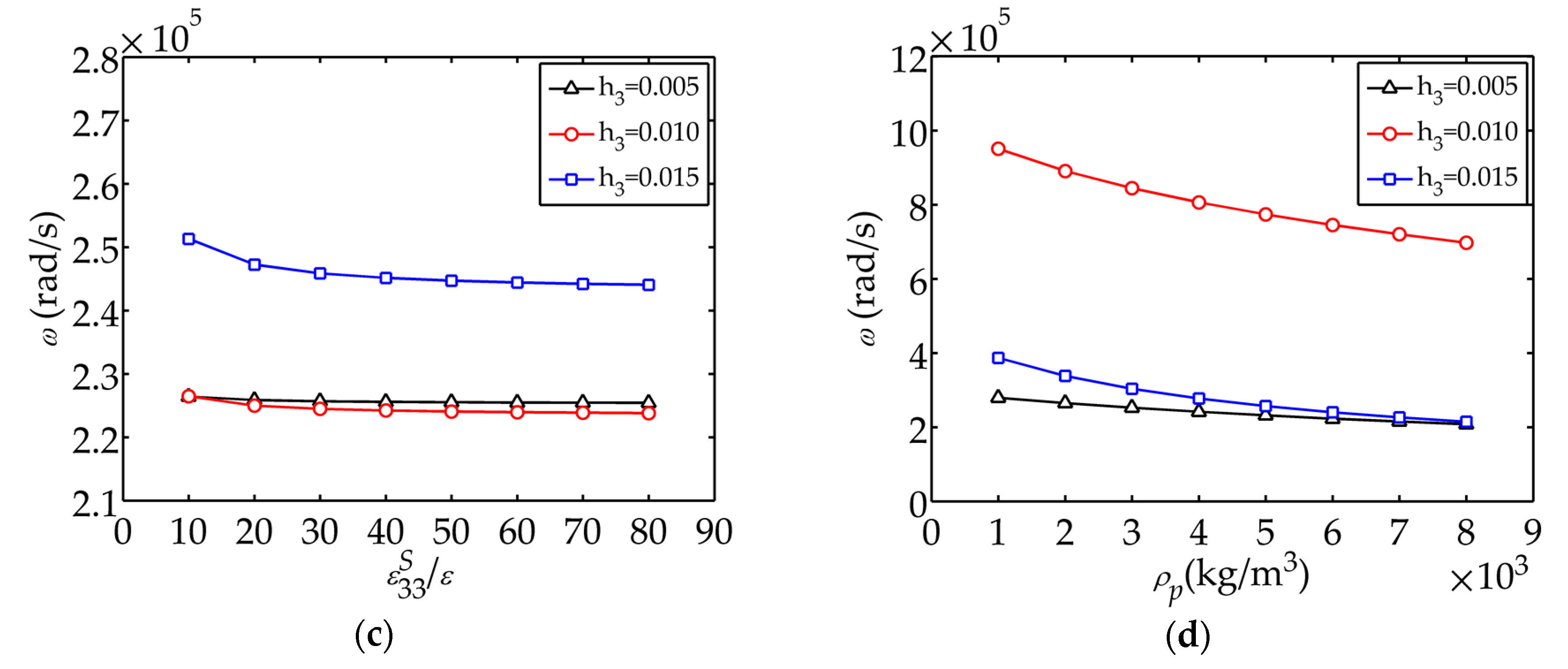
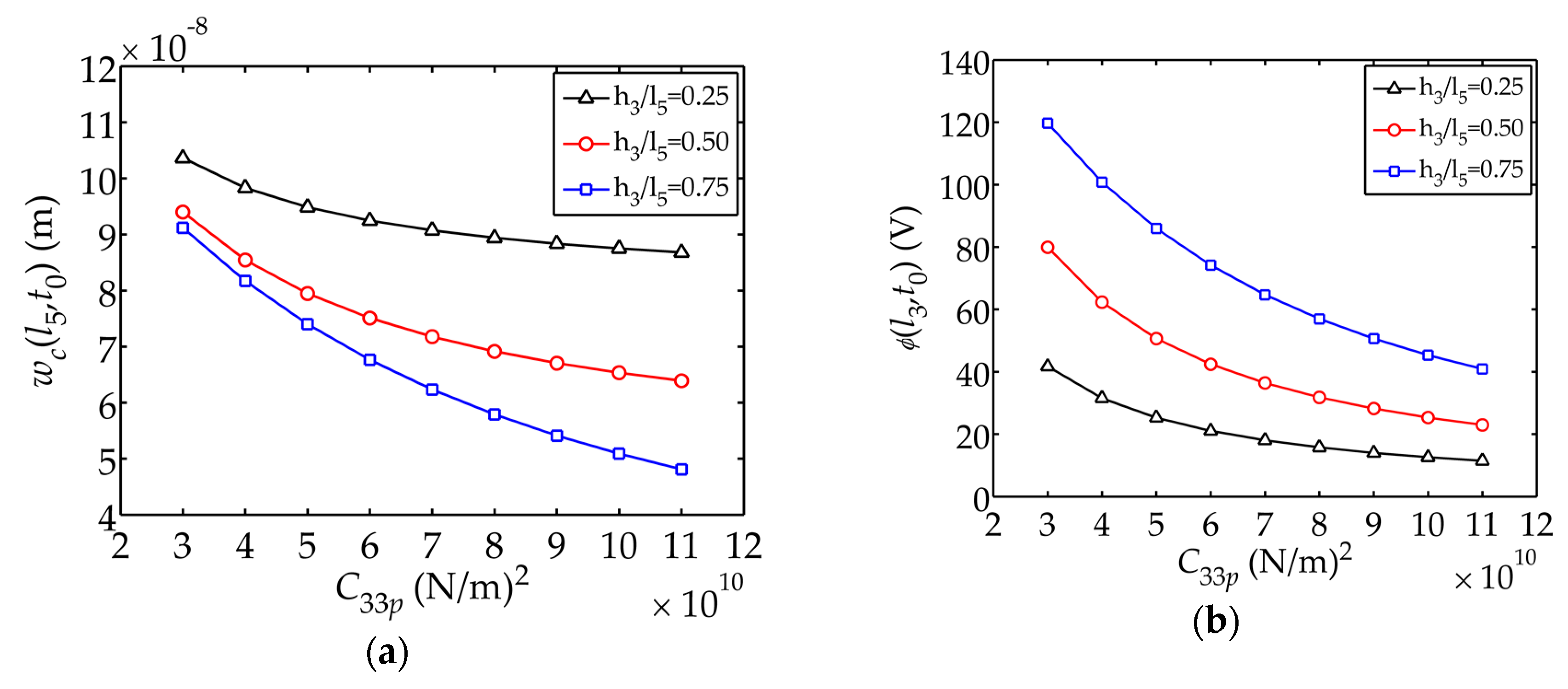
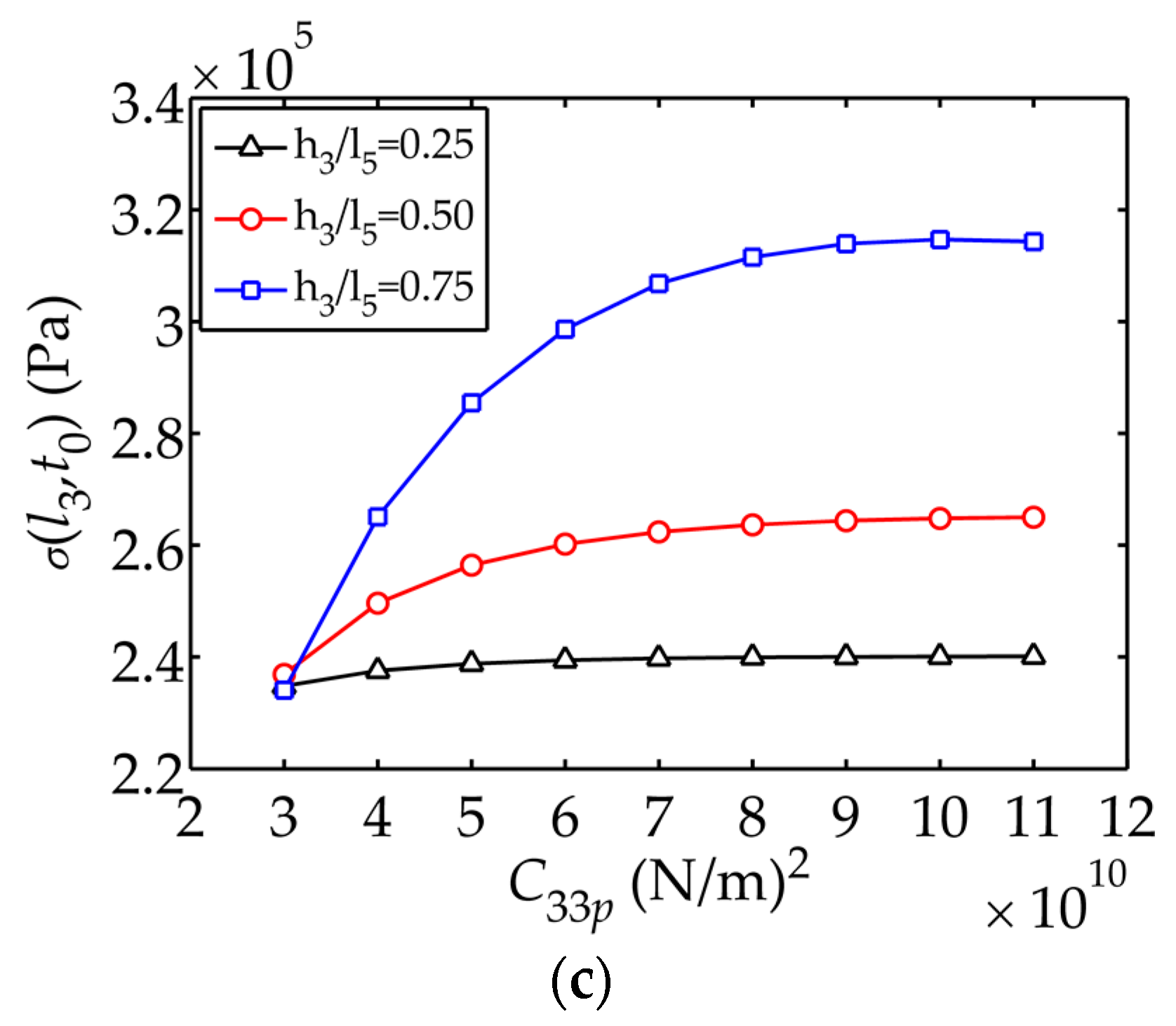
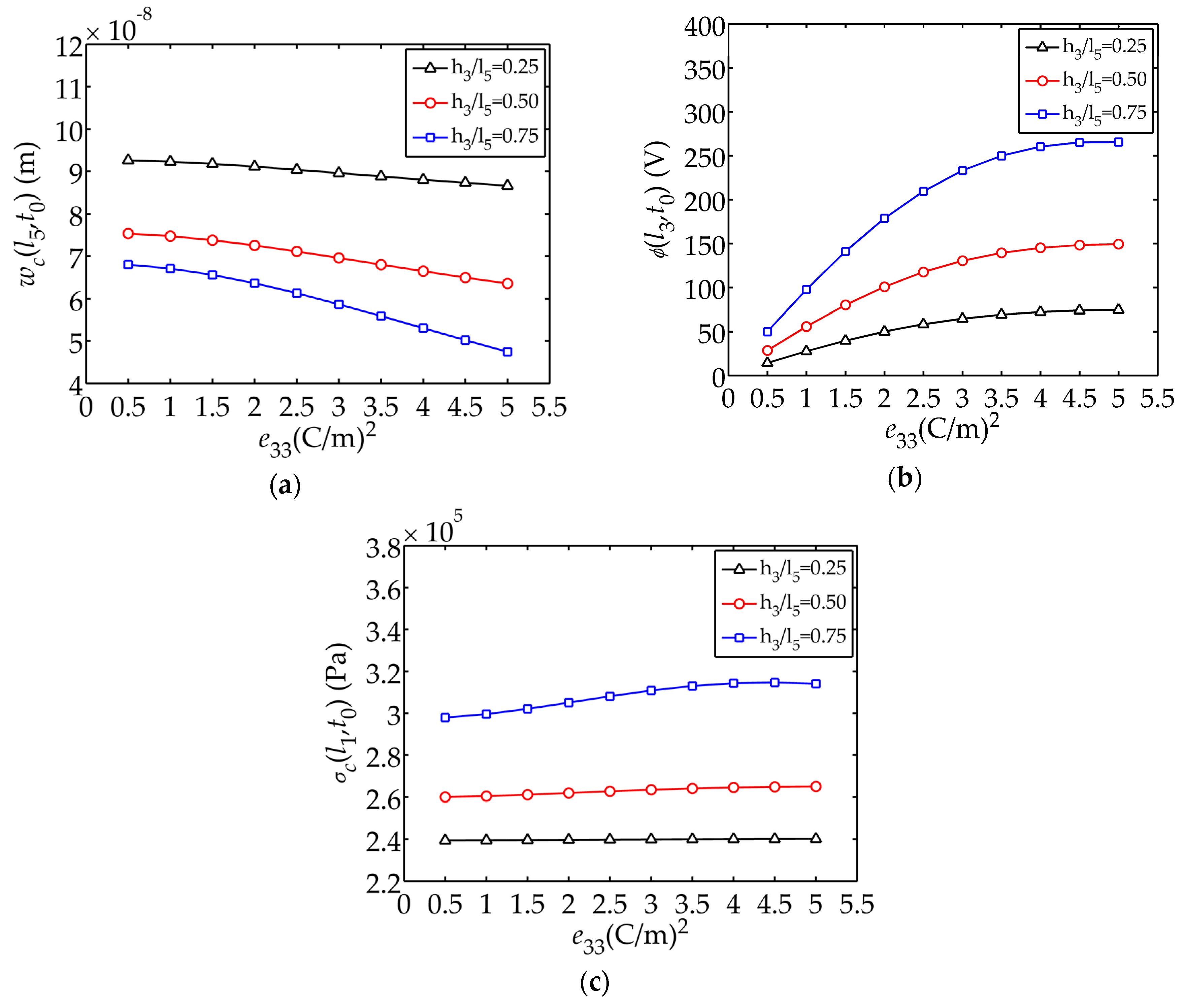
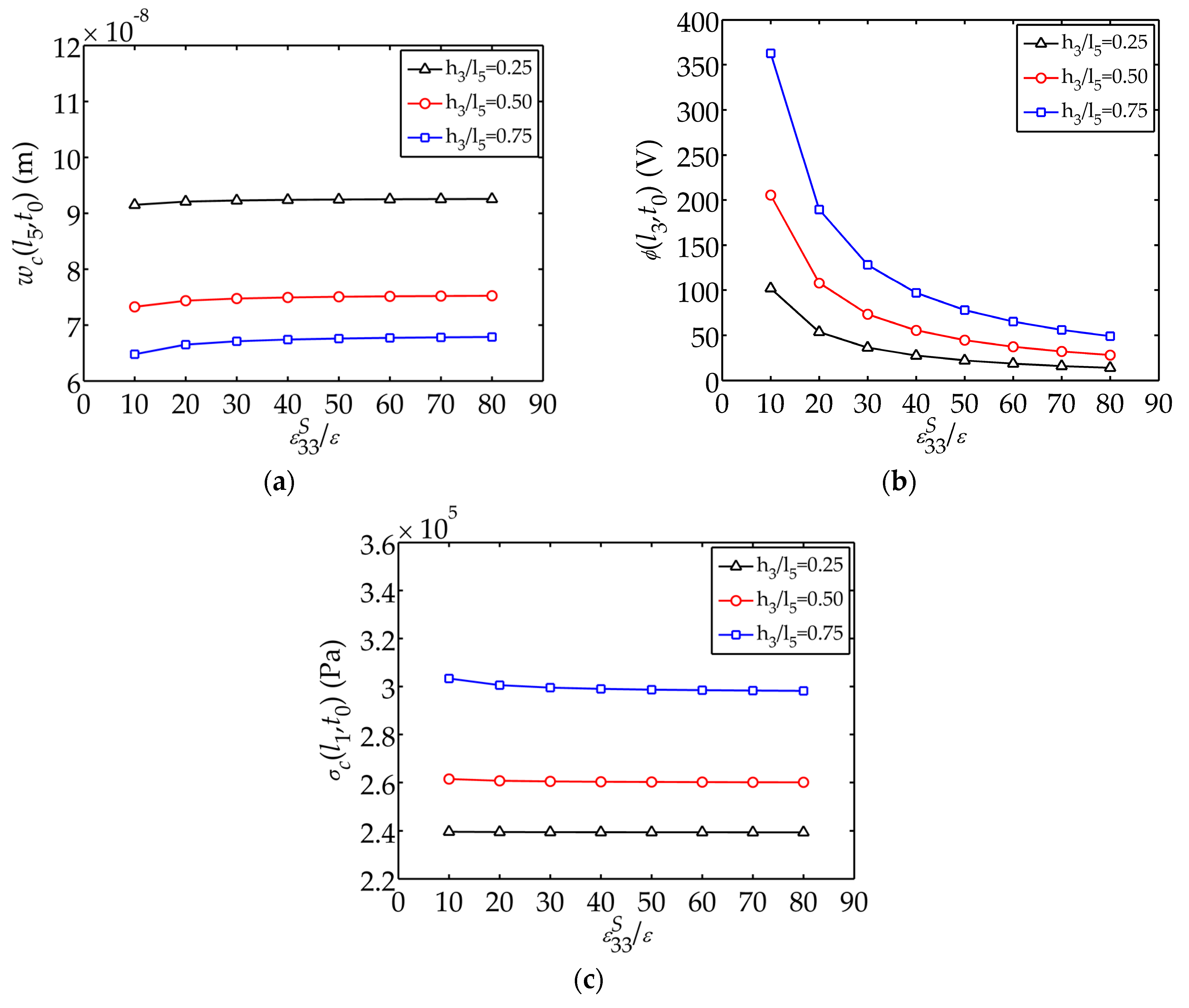
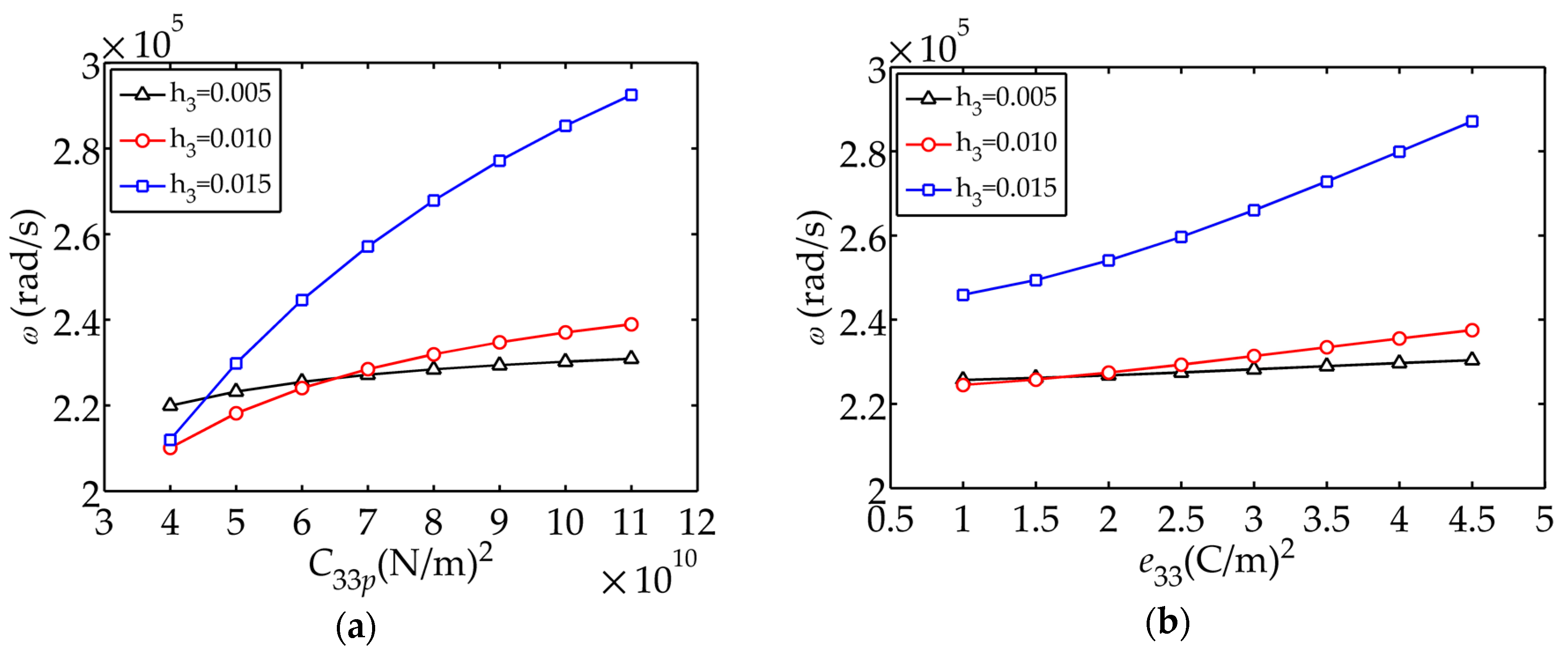
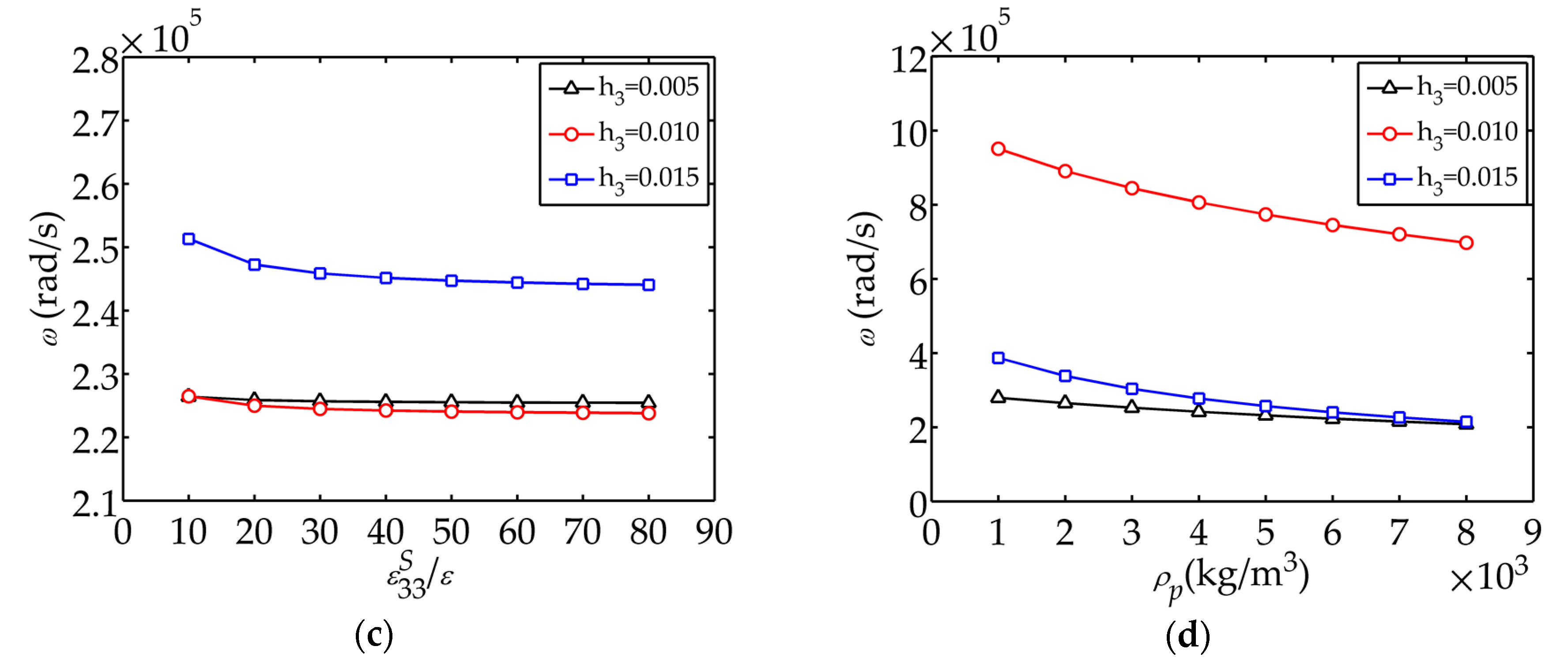
(3) Through adjusting the thickness of layers and material parameters, the displacement, electric potential and stress of the sensor could be optimized. The coefficient has obvious influence on and ; while and have larger influence on . For the sensor, smaller and , larger would provide better mechanical and electrical behaviors. PVDF as piezoelectric material can provide stronger electric power as well as causing smaller internal stress.
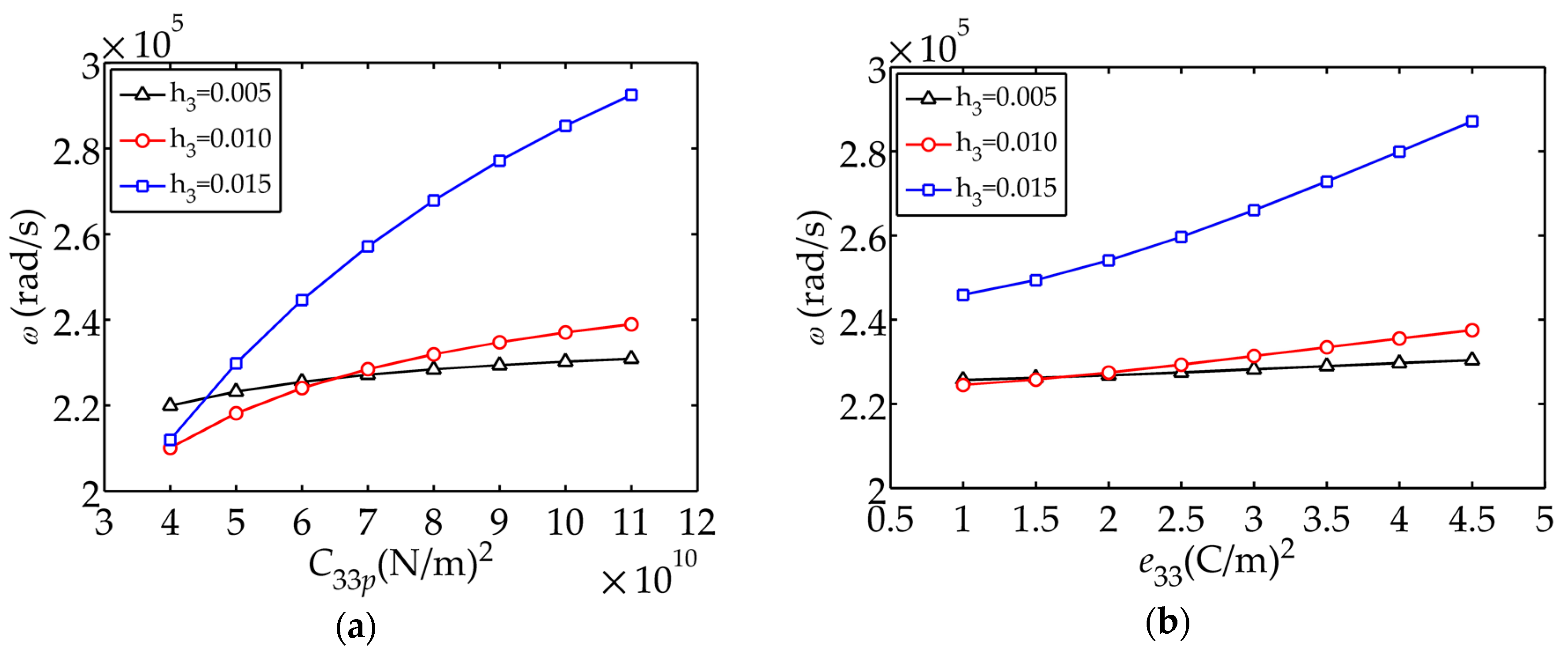
(4) The frequency of the composite could also be controlled by choosing different materials and tailoring the geometry of the composite. The thicker the piezoelectric layer, the greater the effect of the piezoelectric coefficients on the frequency (lager changing rate).
By analyzing the dynamic characteristics of the sensor, the present work would provide certain guidance for the sensor structure design, material selection and impact load design, both in simulations and experiments.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}