Initial Alignment for SINS Based on Pseudo-Earth Frame in Polar Regions

Abstract
:1. Introduction
2. The Polar Alignment Scheme Based on Pseudo-Earth Frame
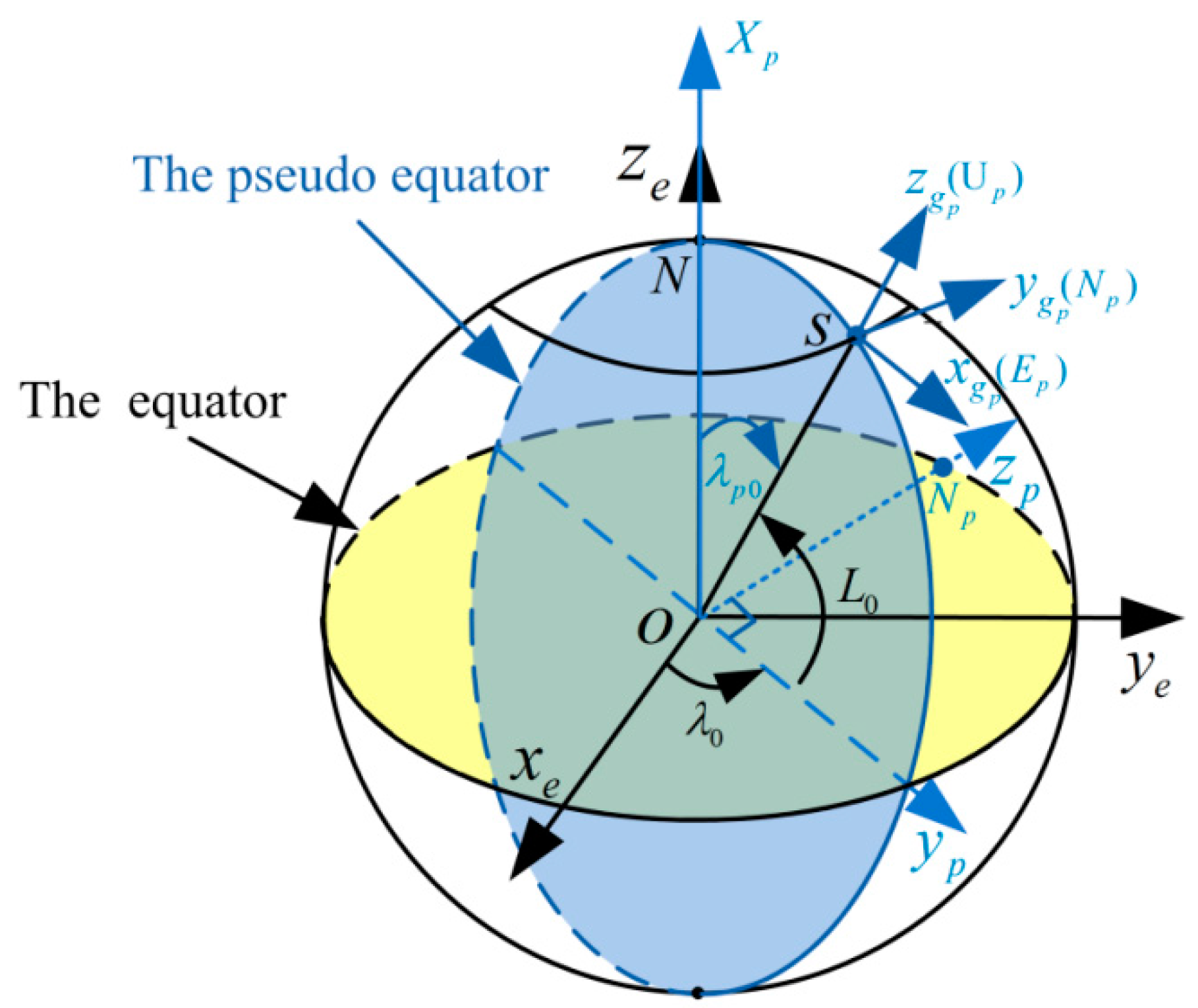
2.1. The Mechanization of SINS with Pseudo-Earth Frame
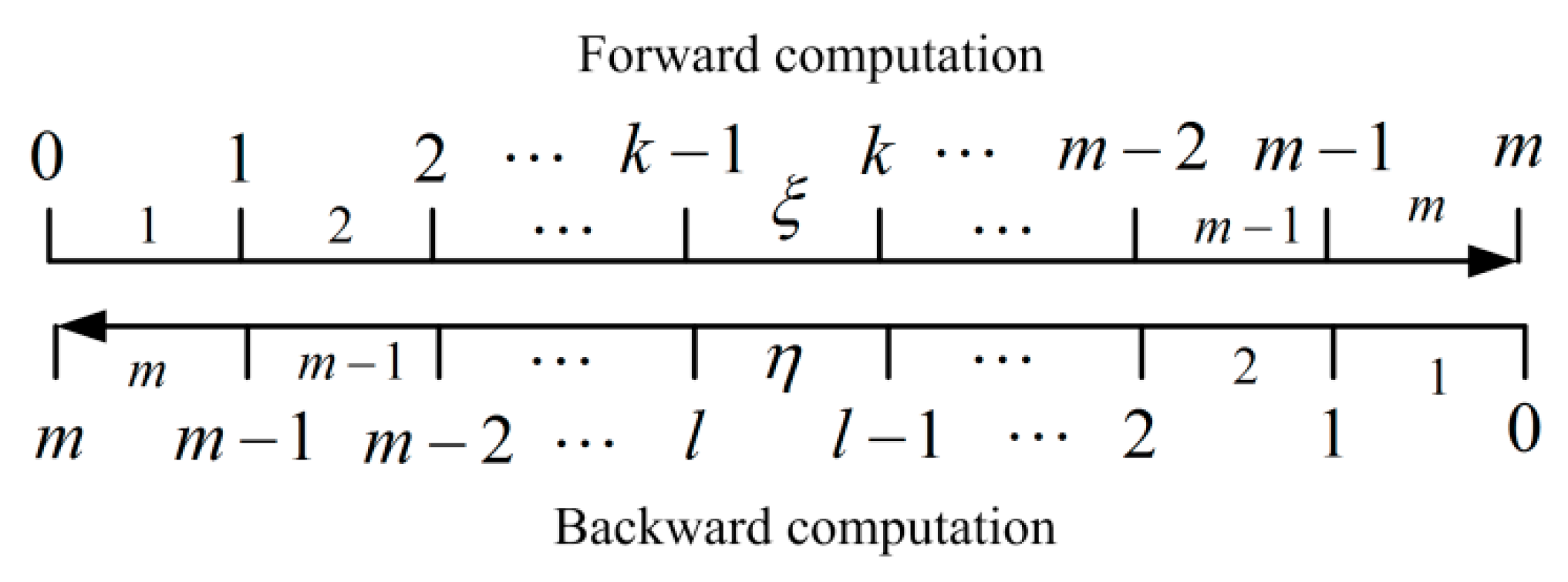
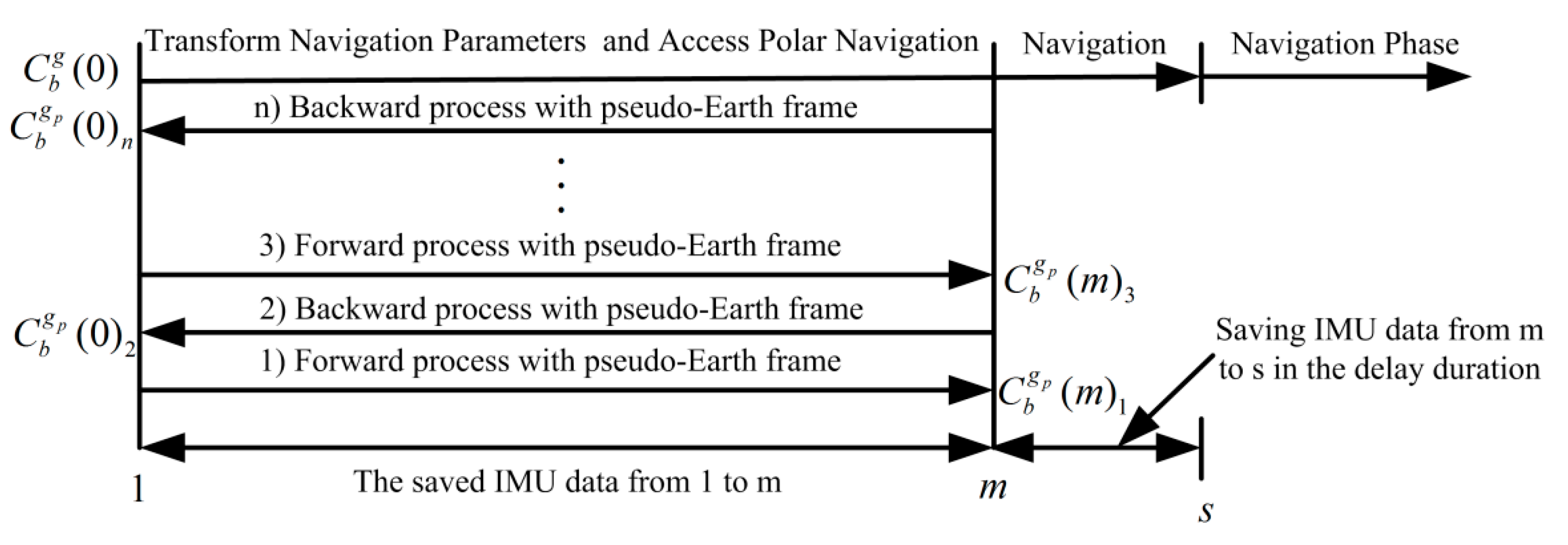
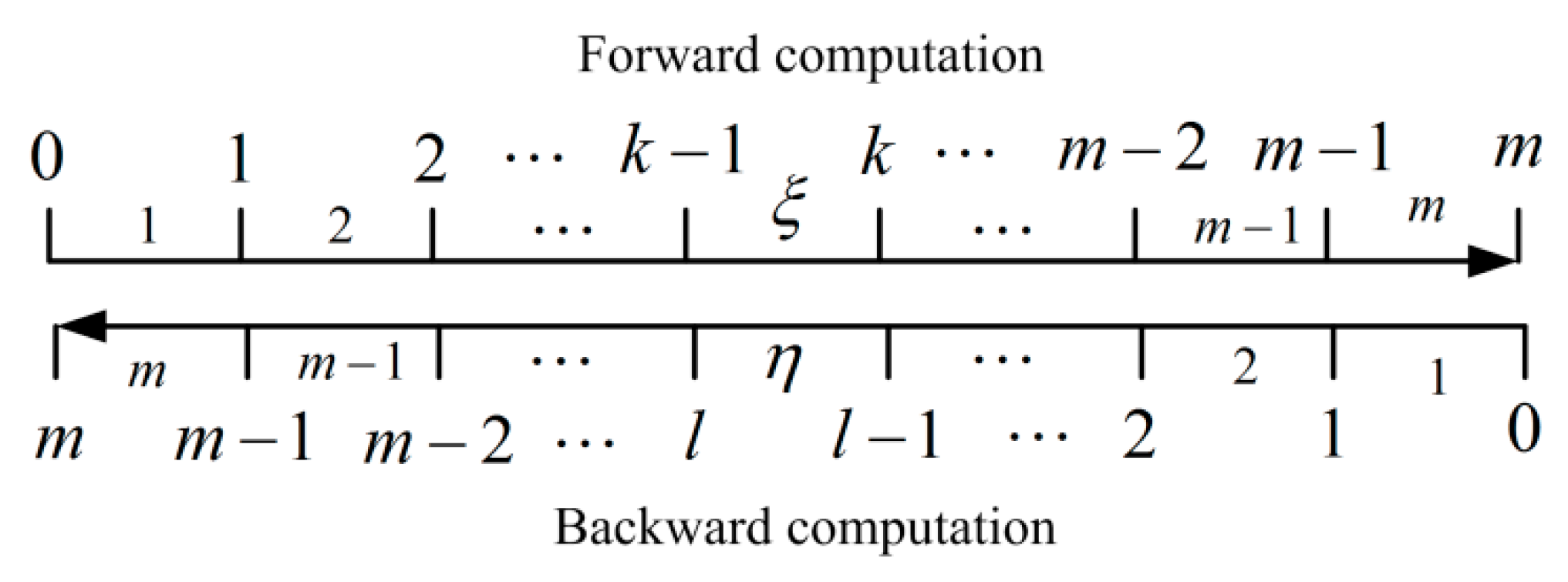
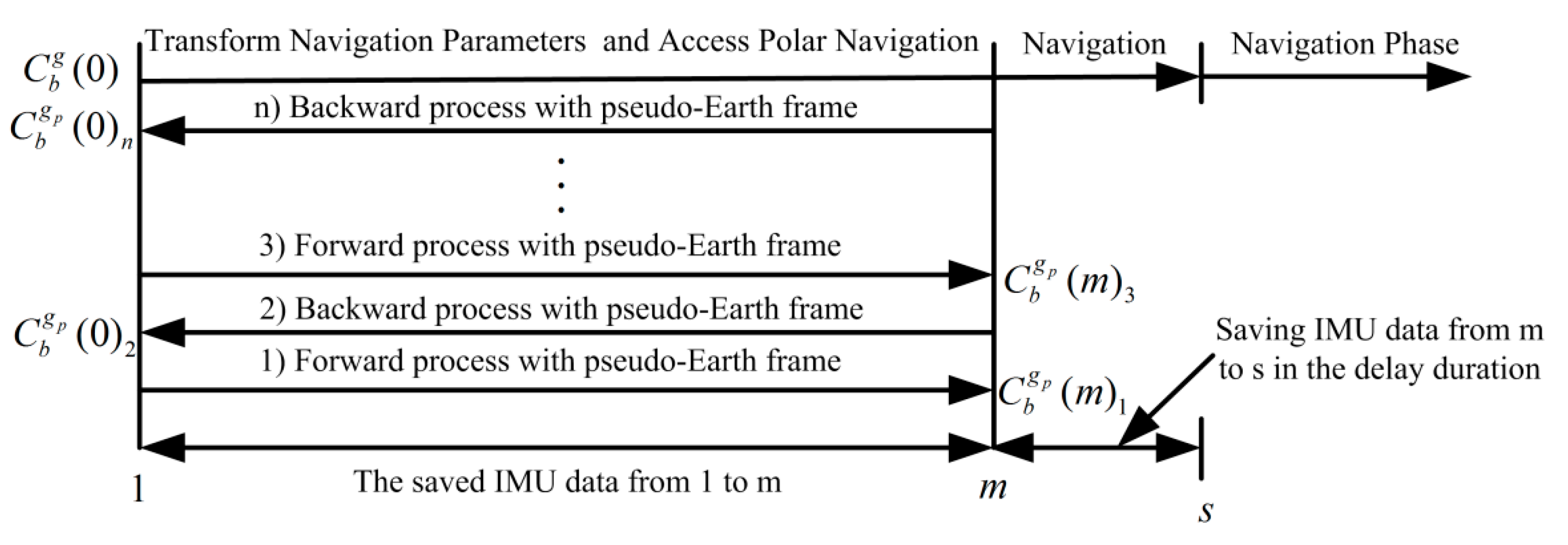
2.2. Backward Process for Pseudo Navigation System
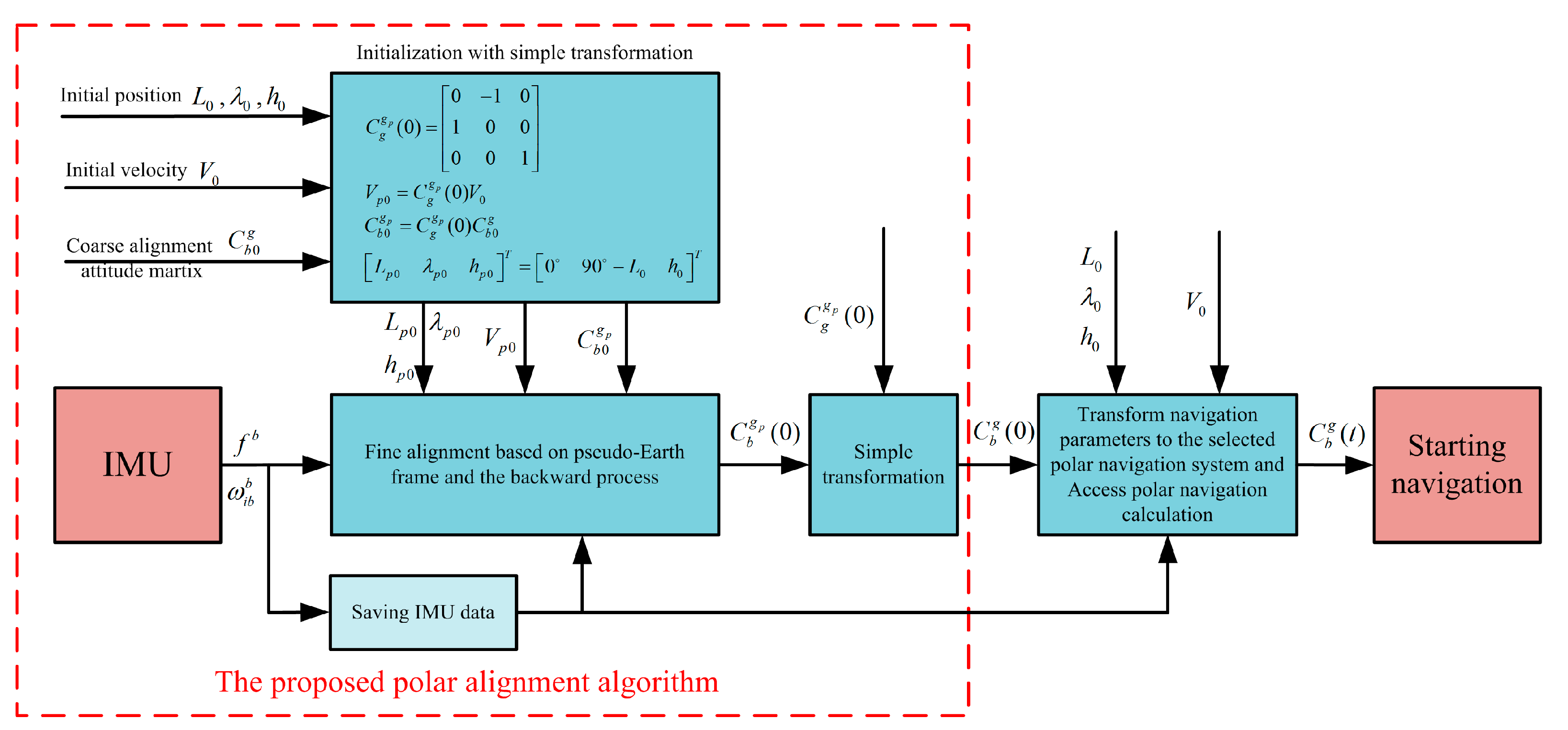
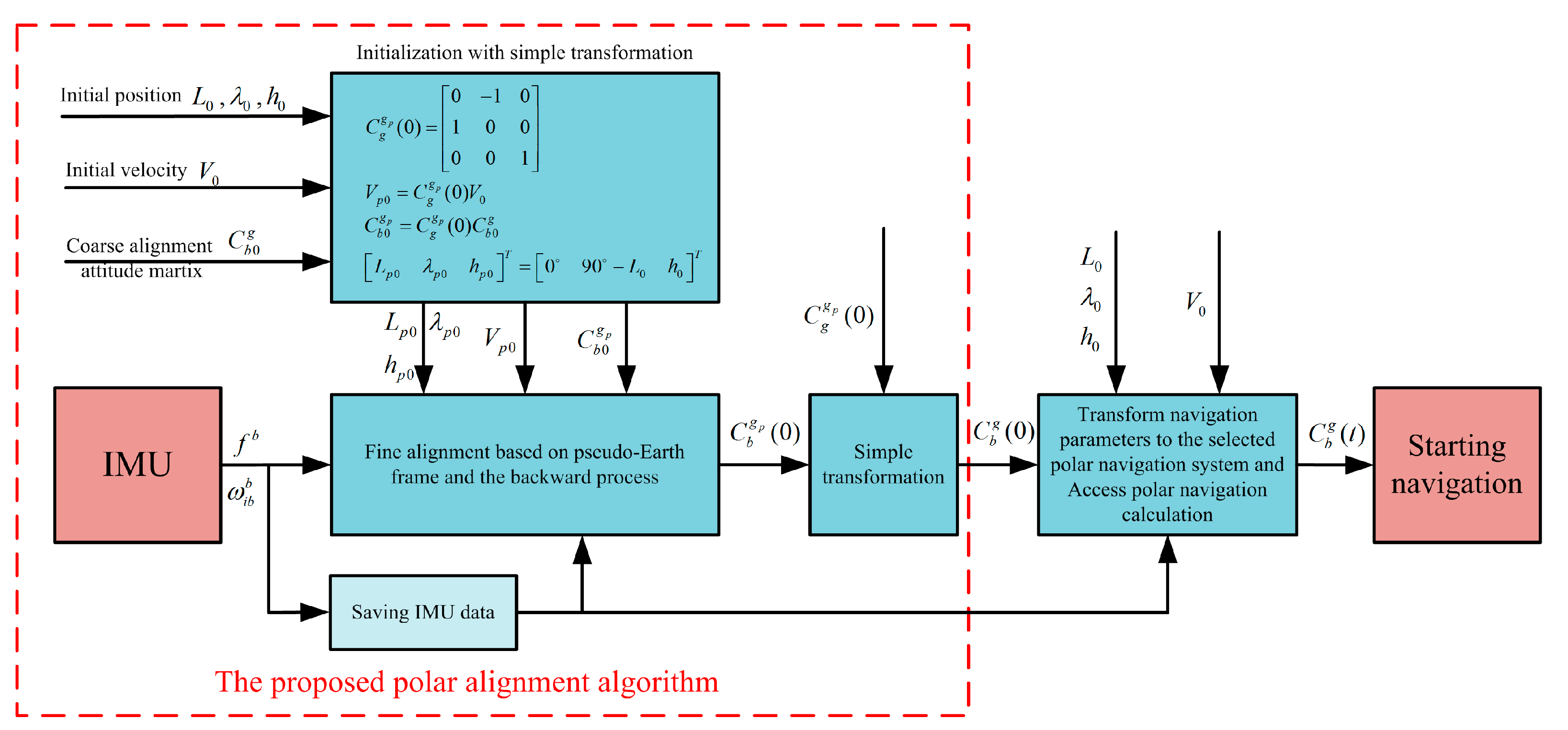
2.3. The Proposed Polar Alignment Scheme with Pseudo-Earth frame
3. Pseudo Navigation Error Equations with Large Azimuth Misalignment Angle
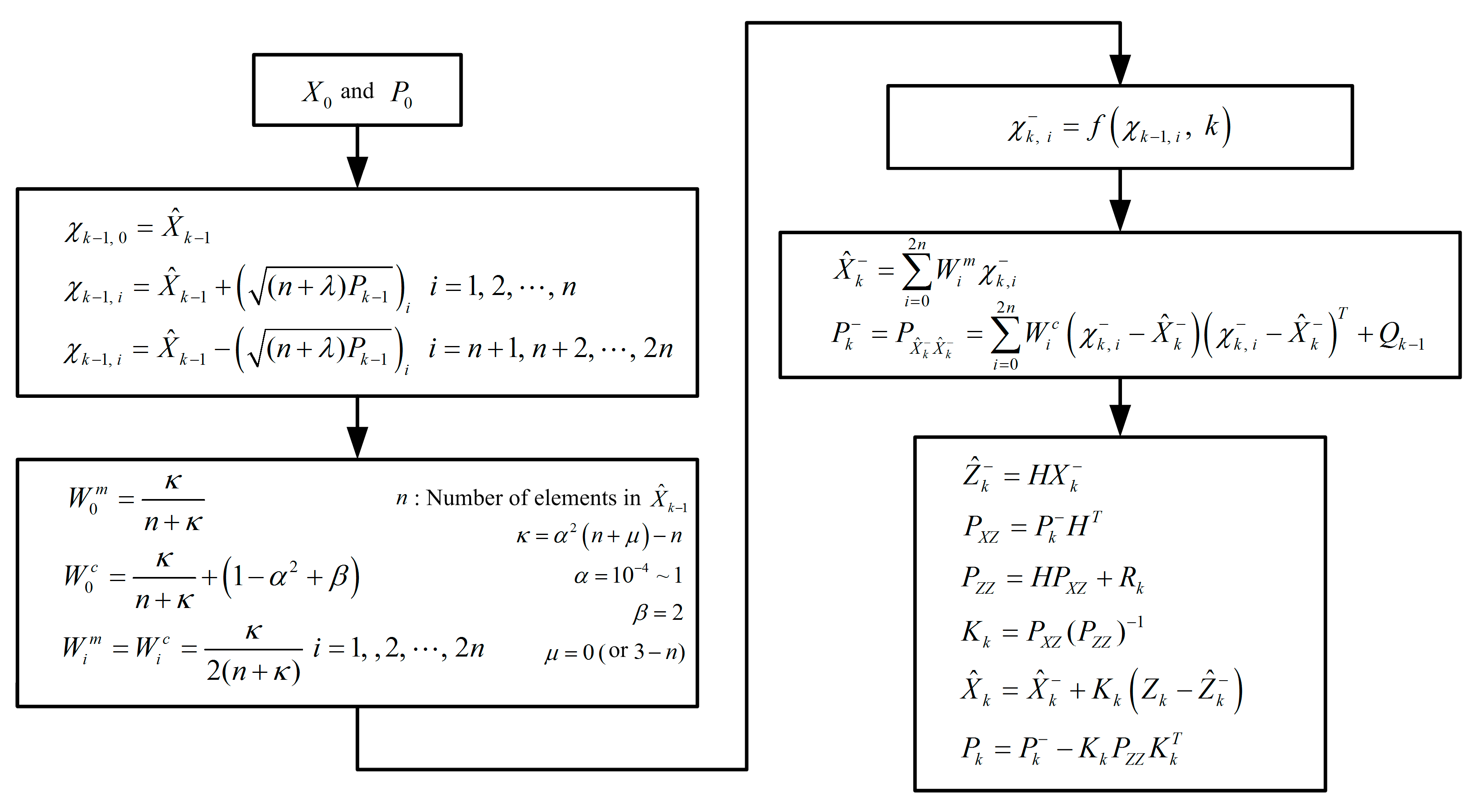
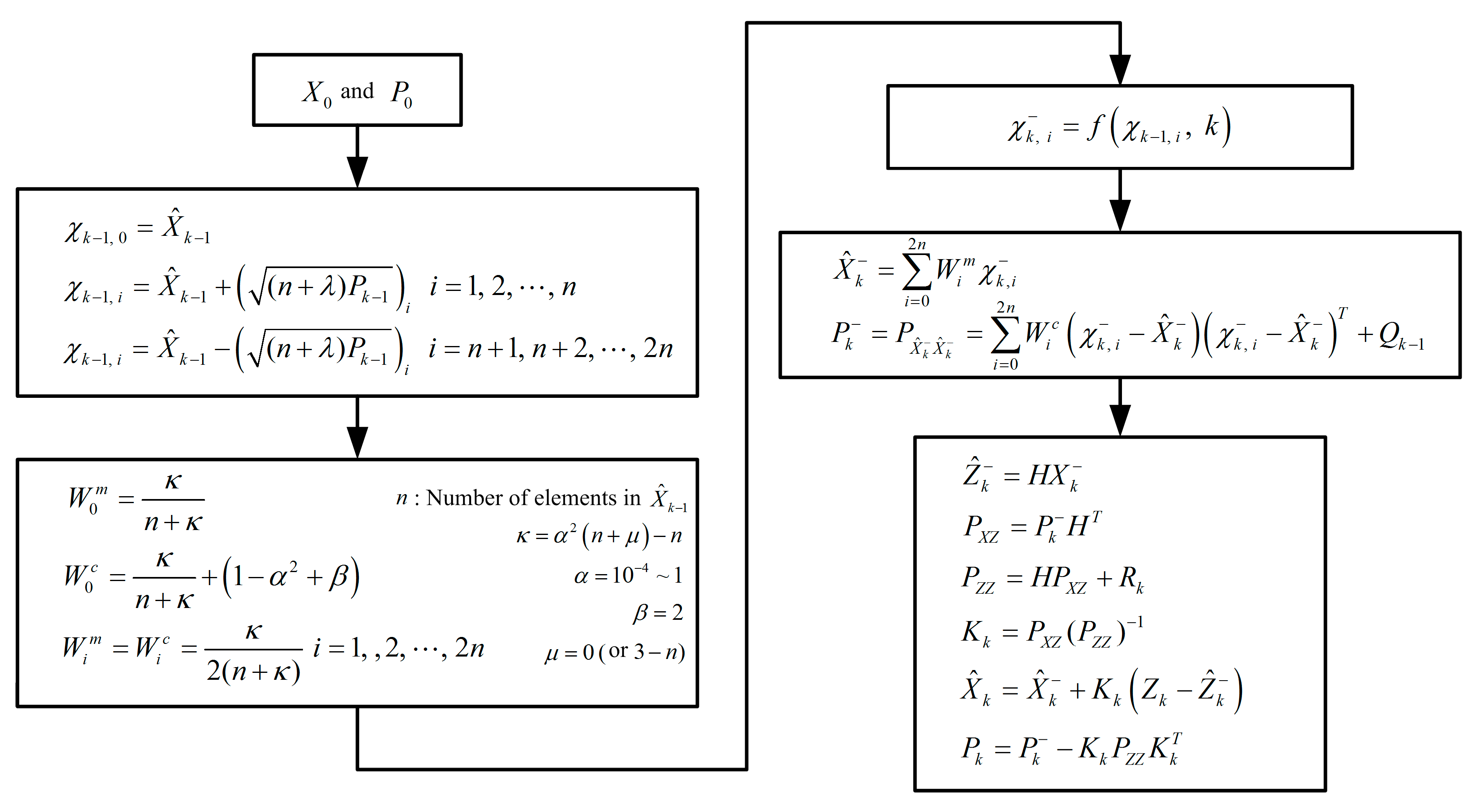
4. The Design of Nonlinear Filter Model for Polar Alignment
5. Simulation and Test
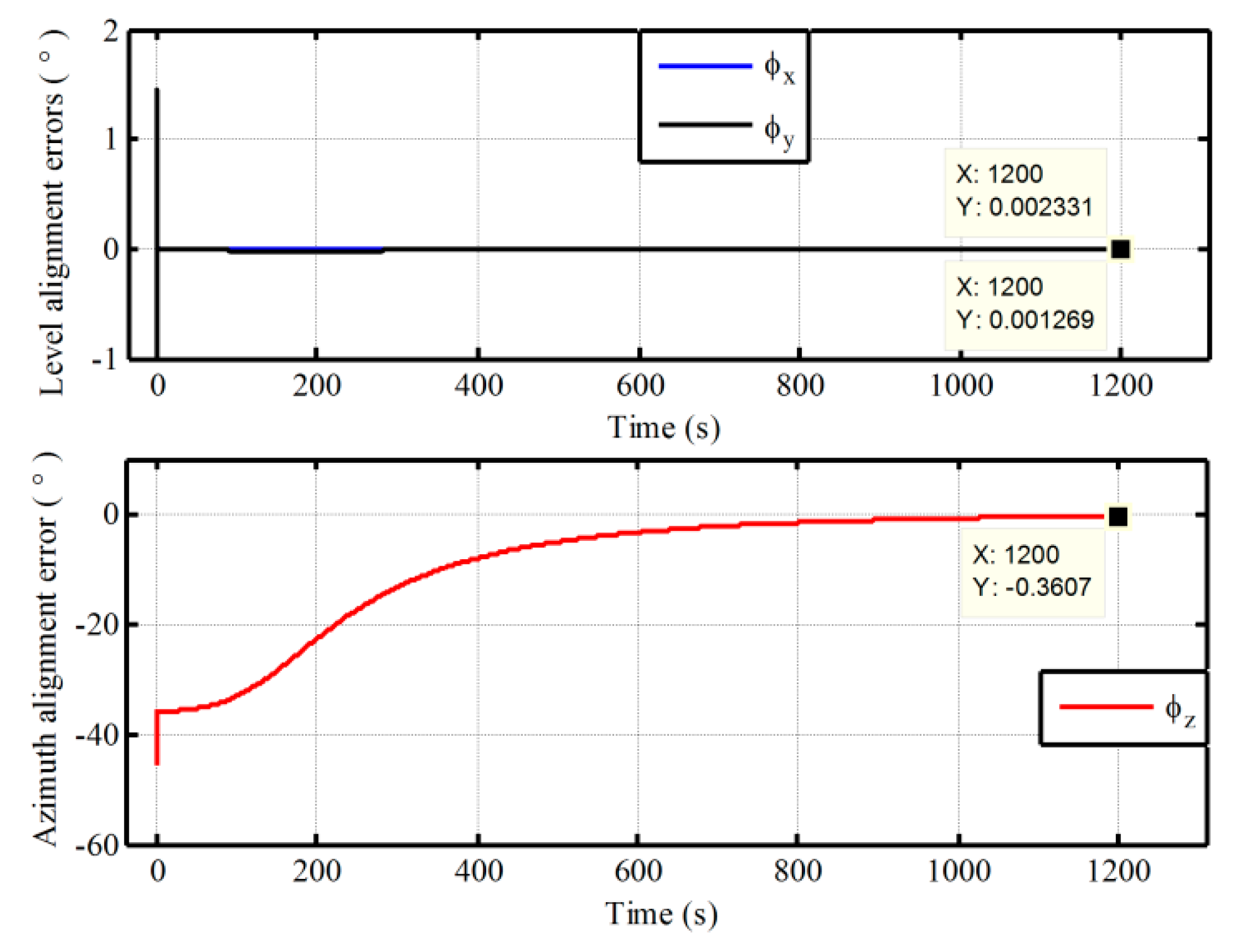
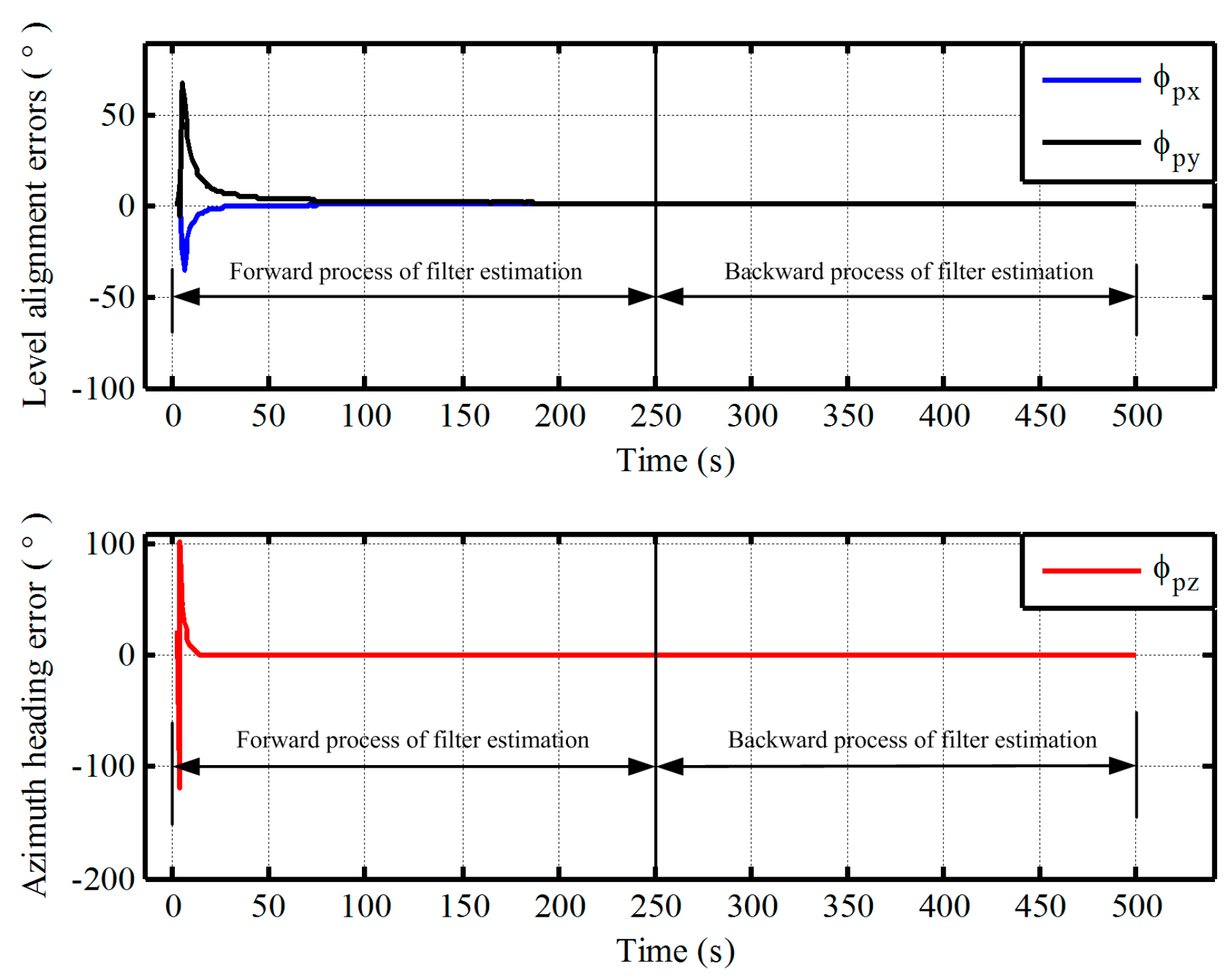
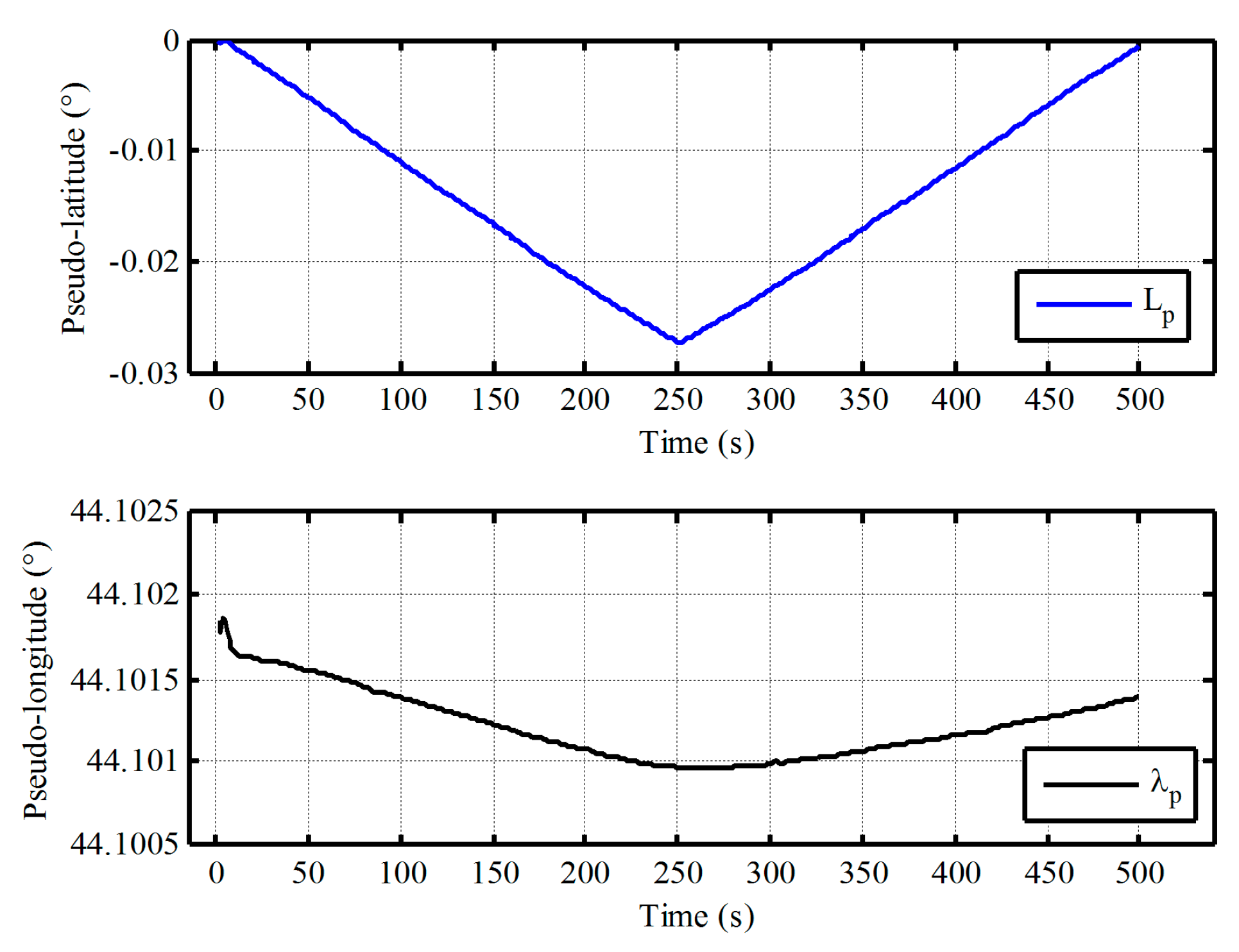
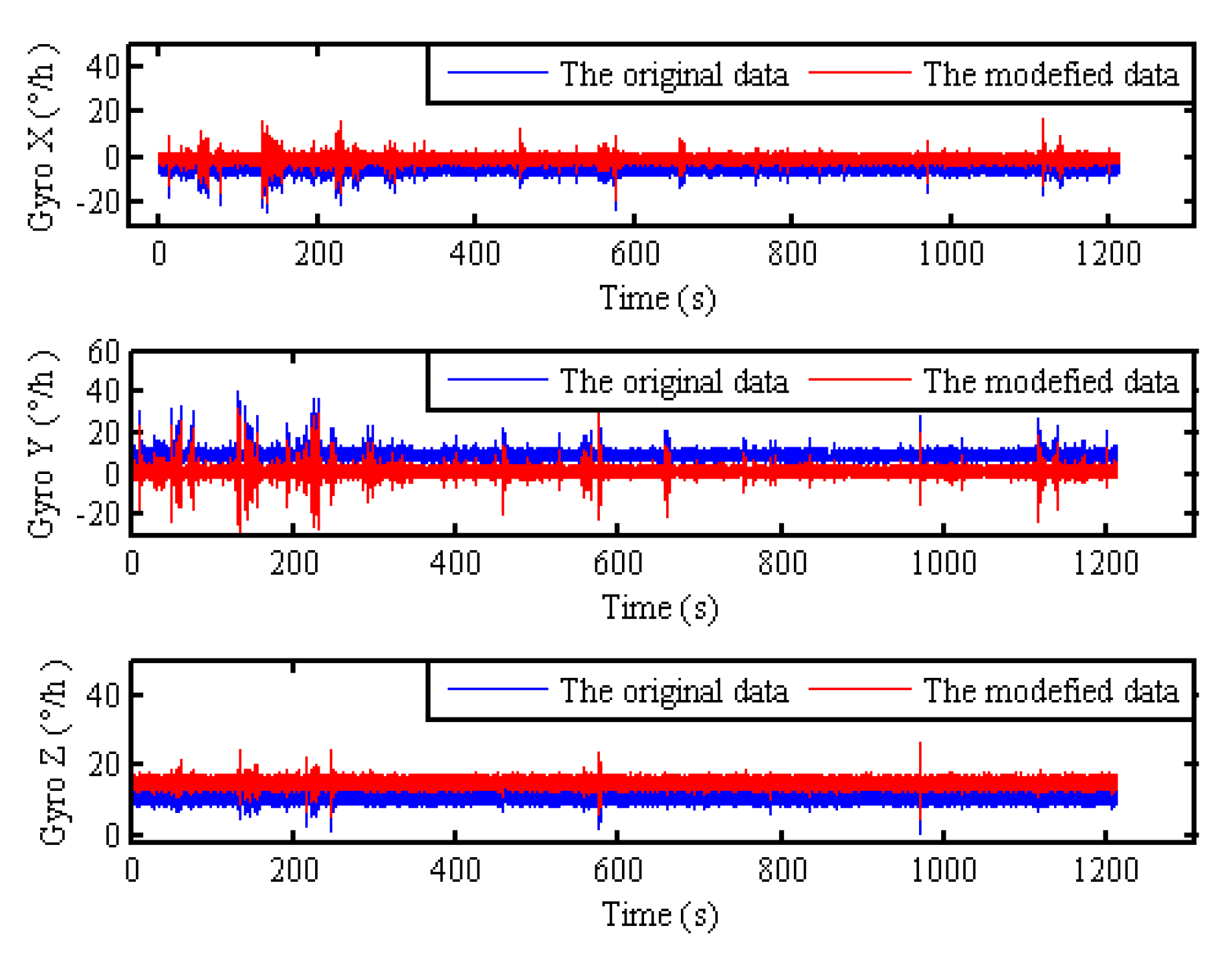
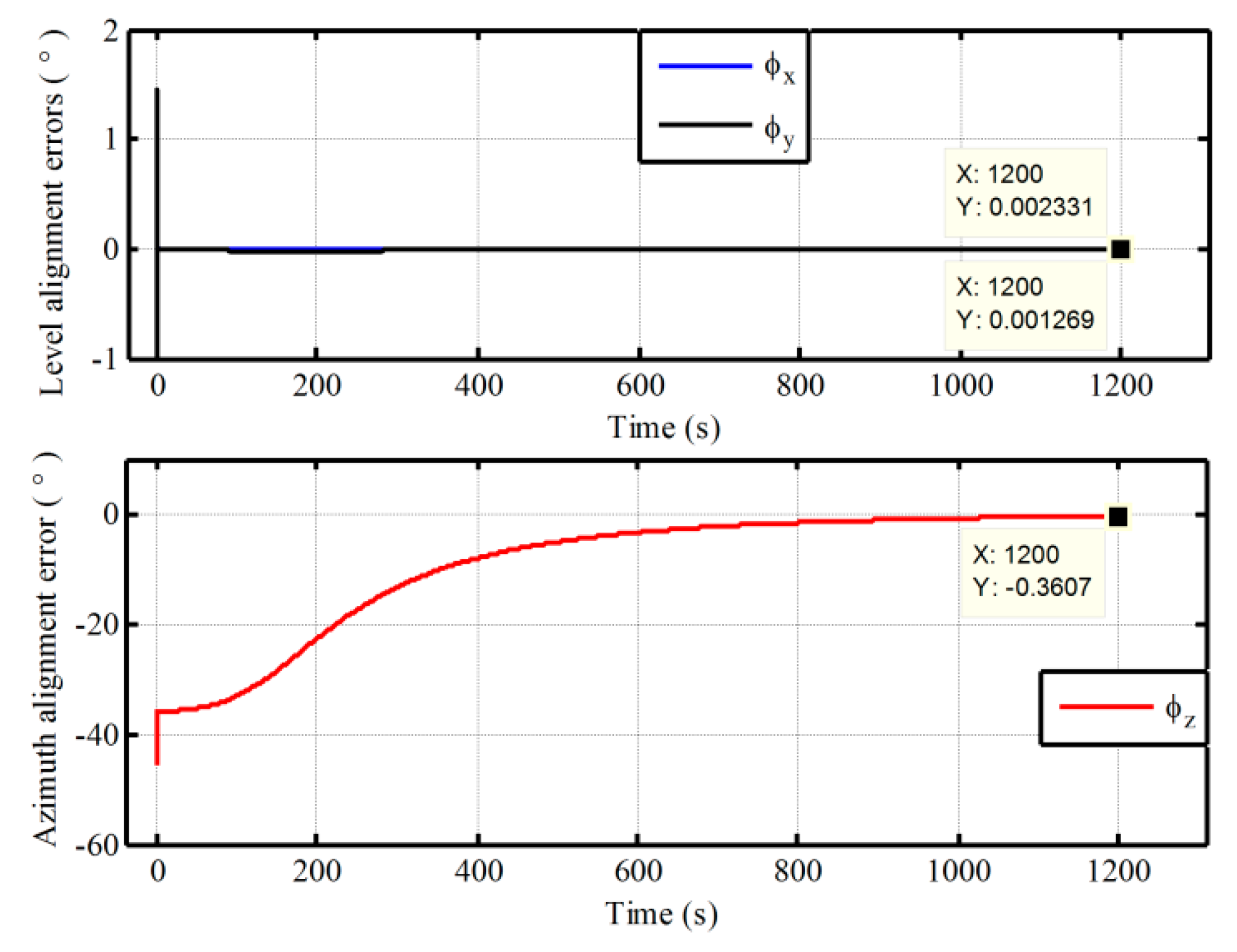
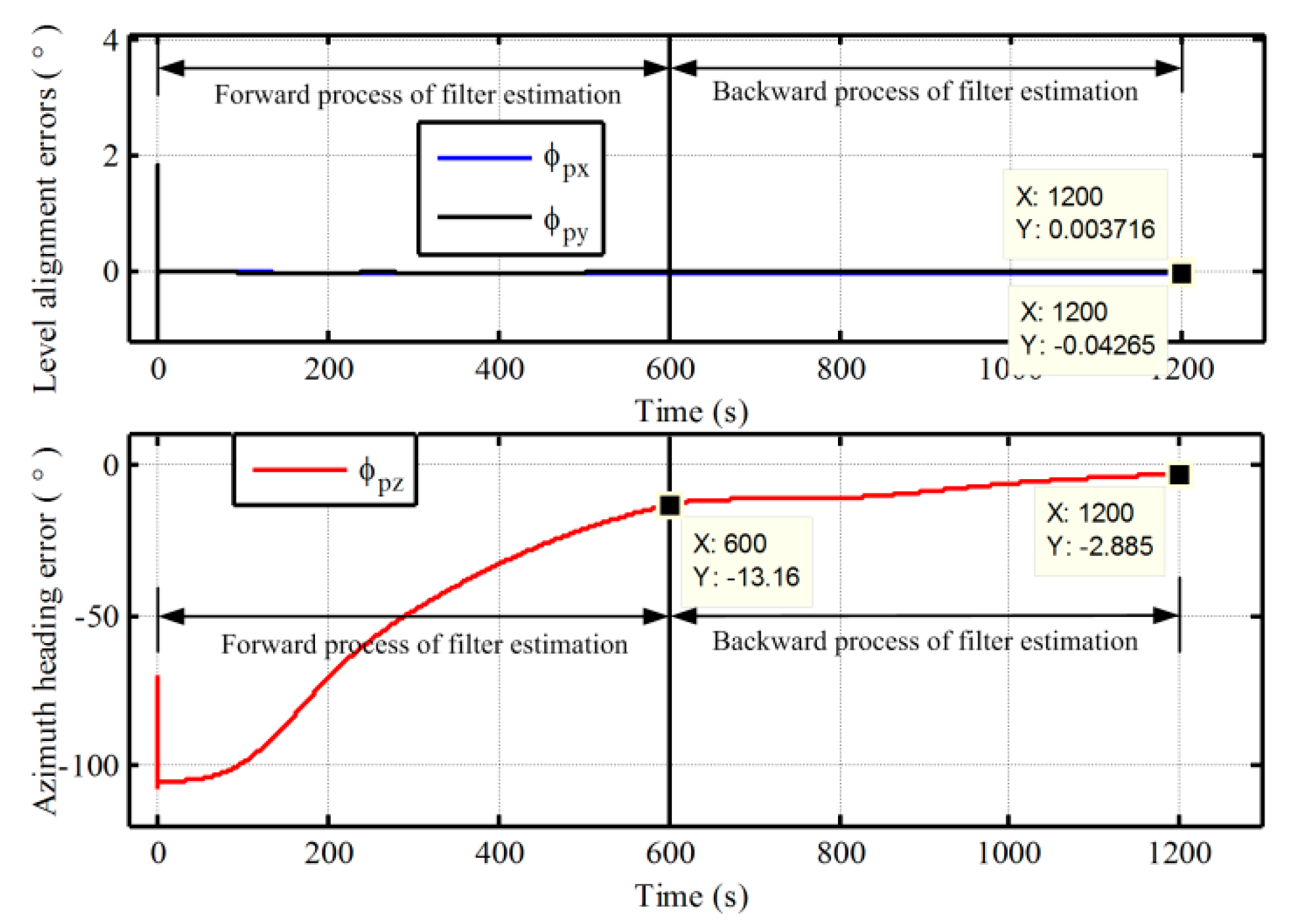
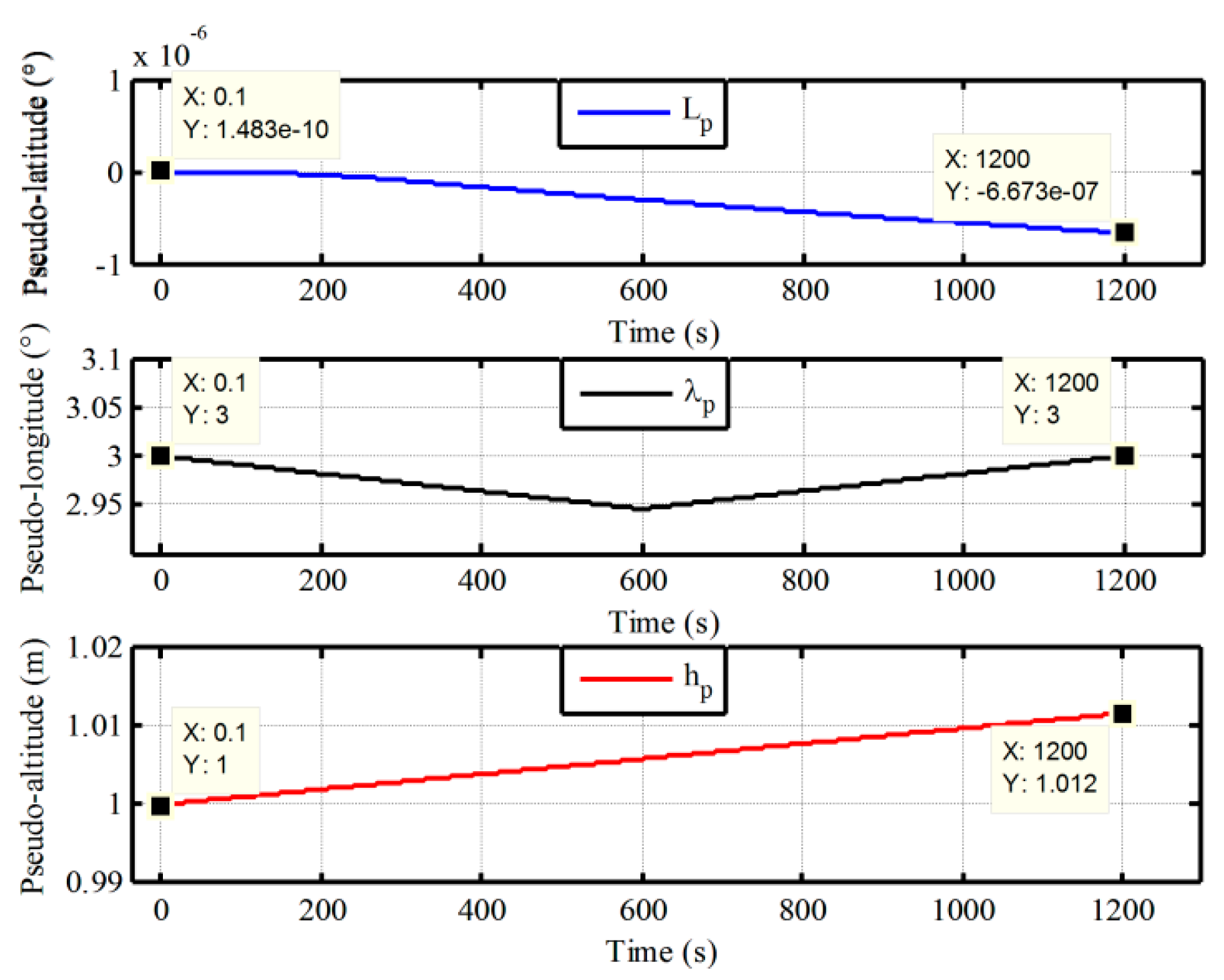
5.1. Semi-Physical Static Simulation
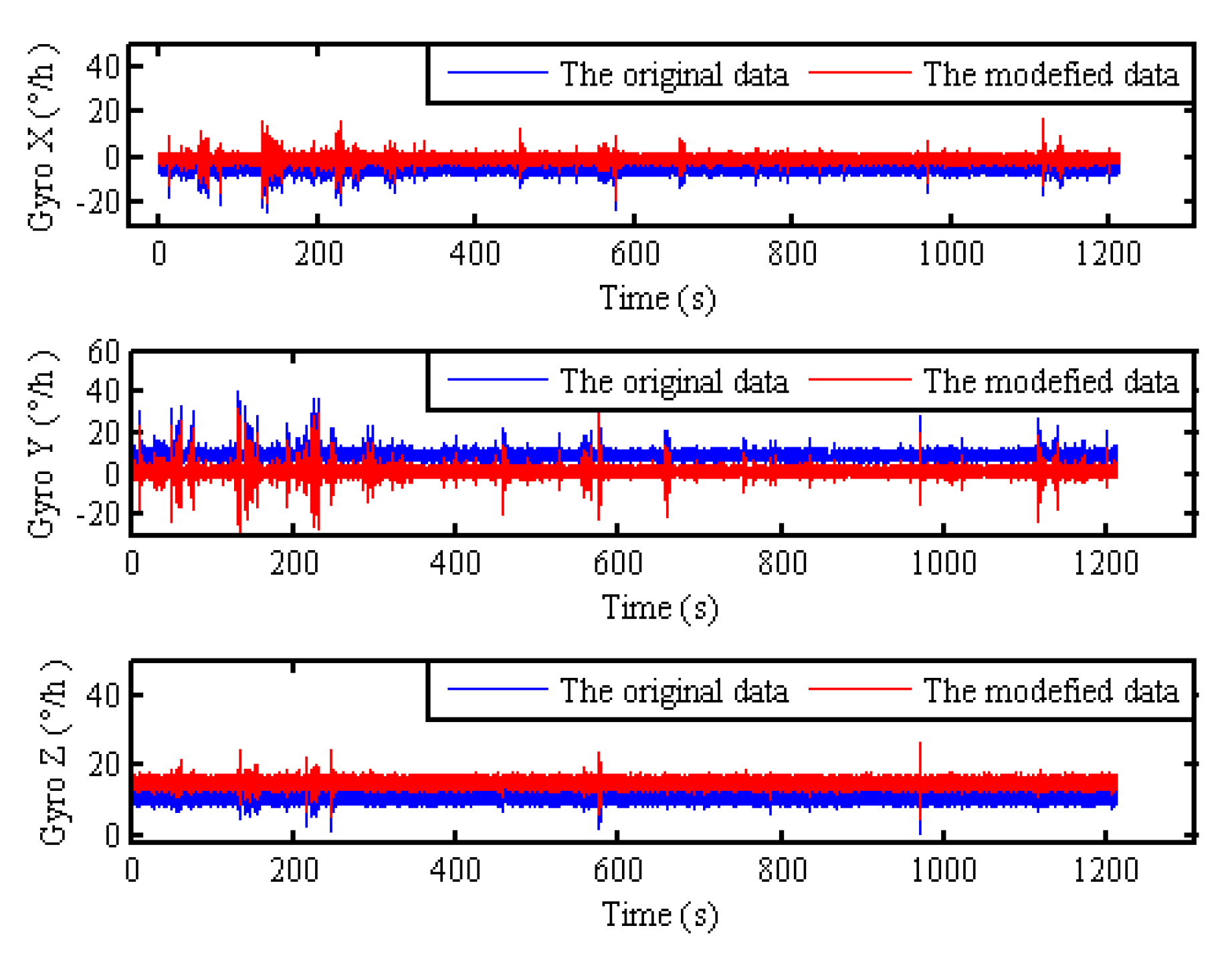
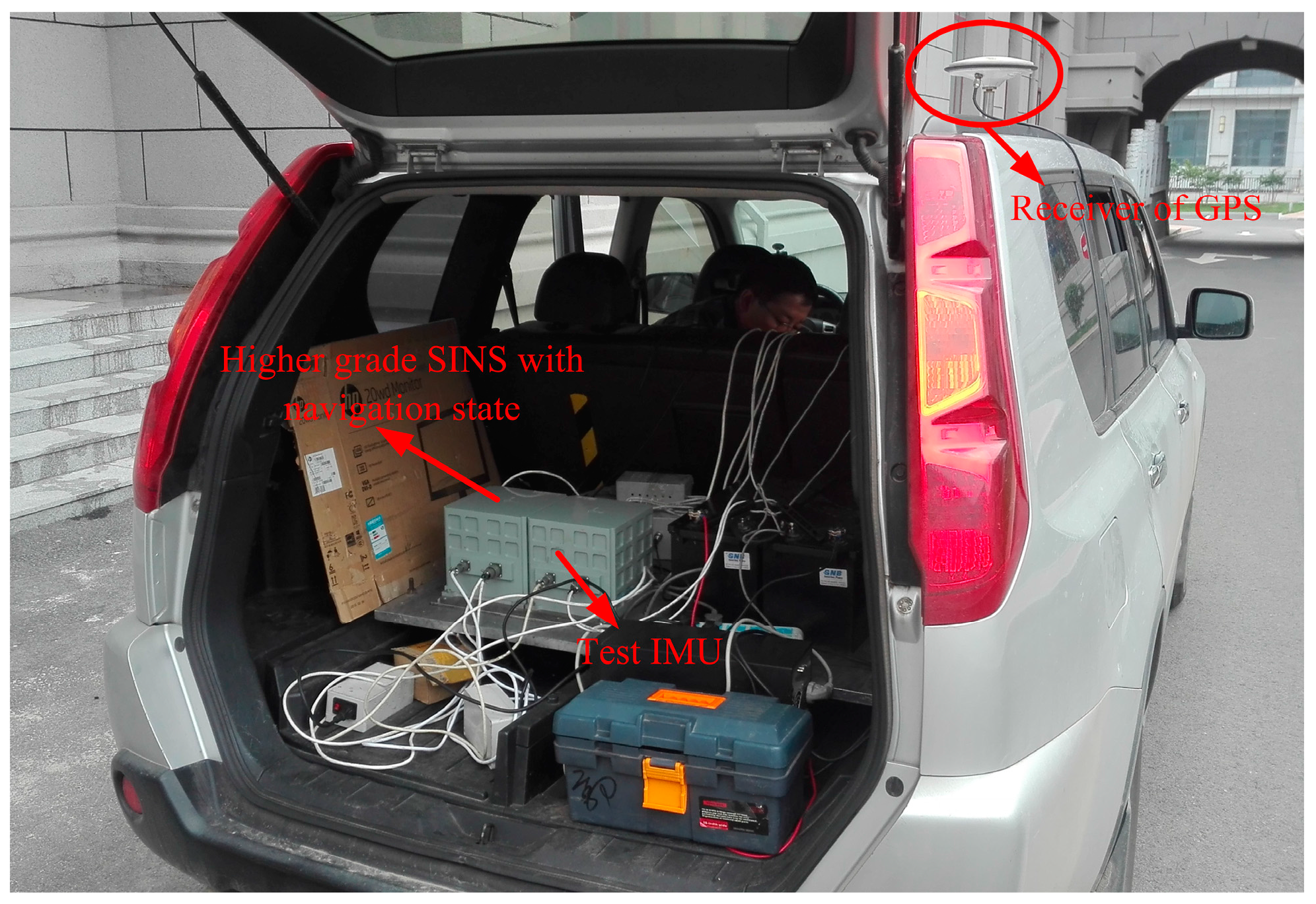
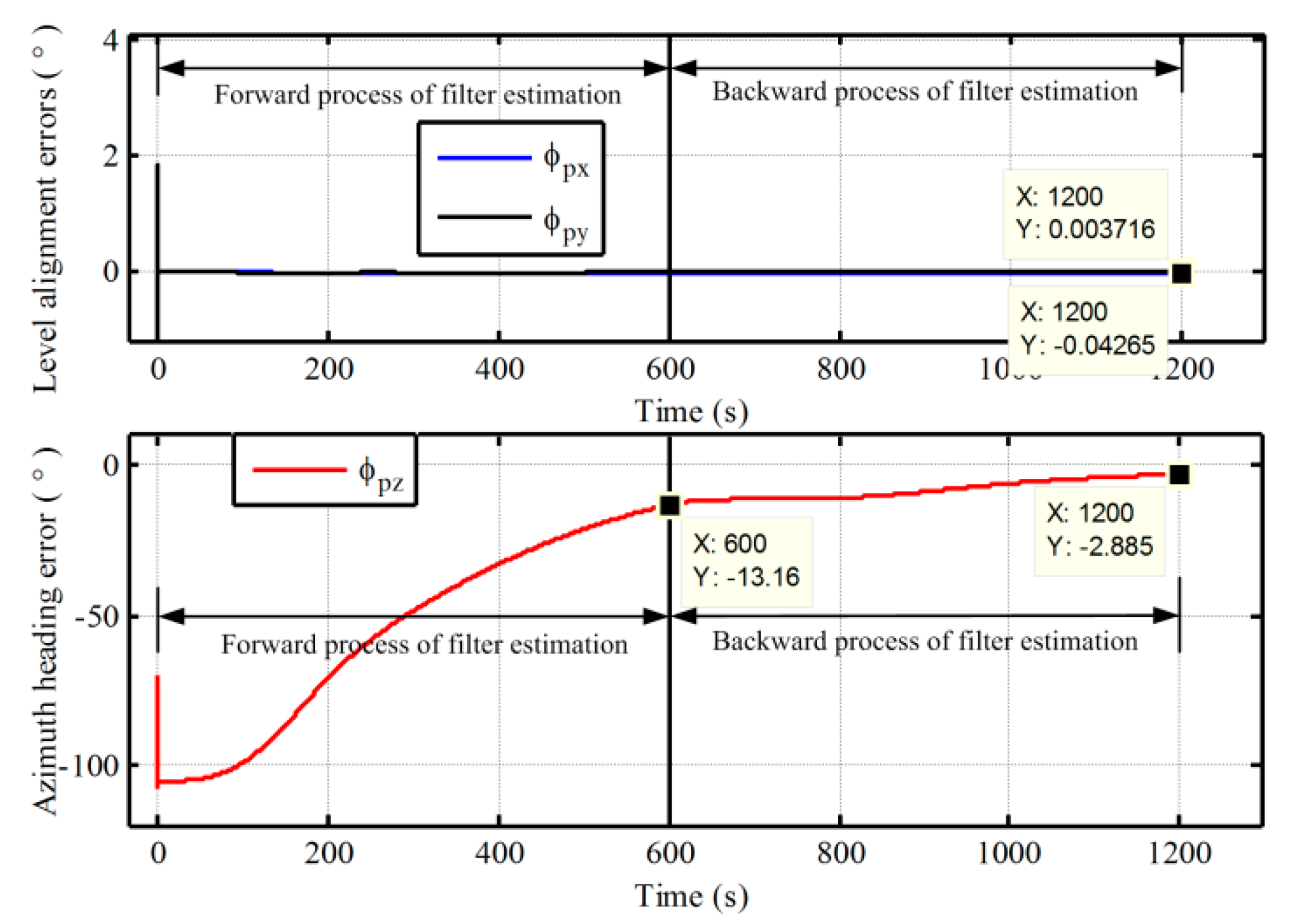
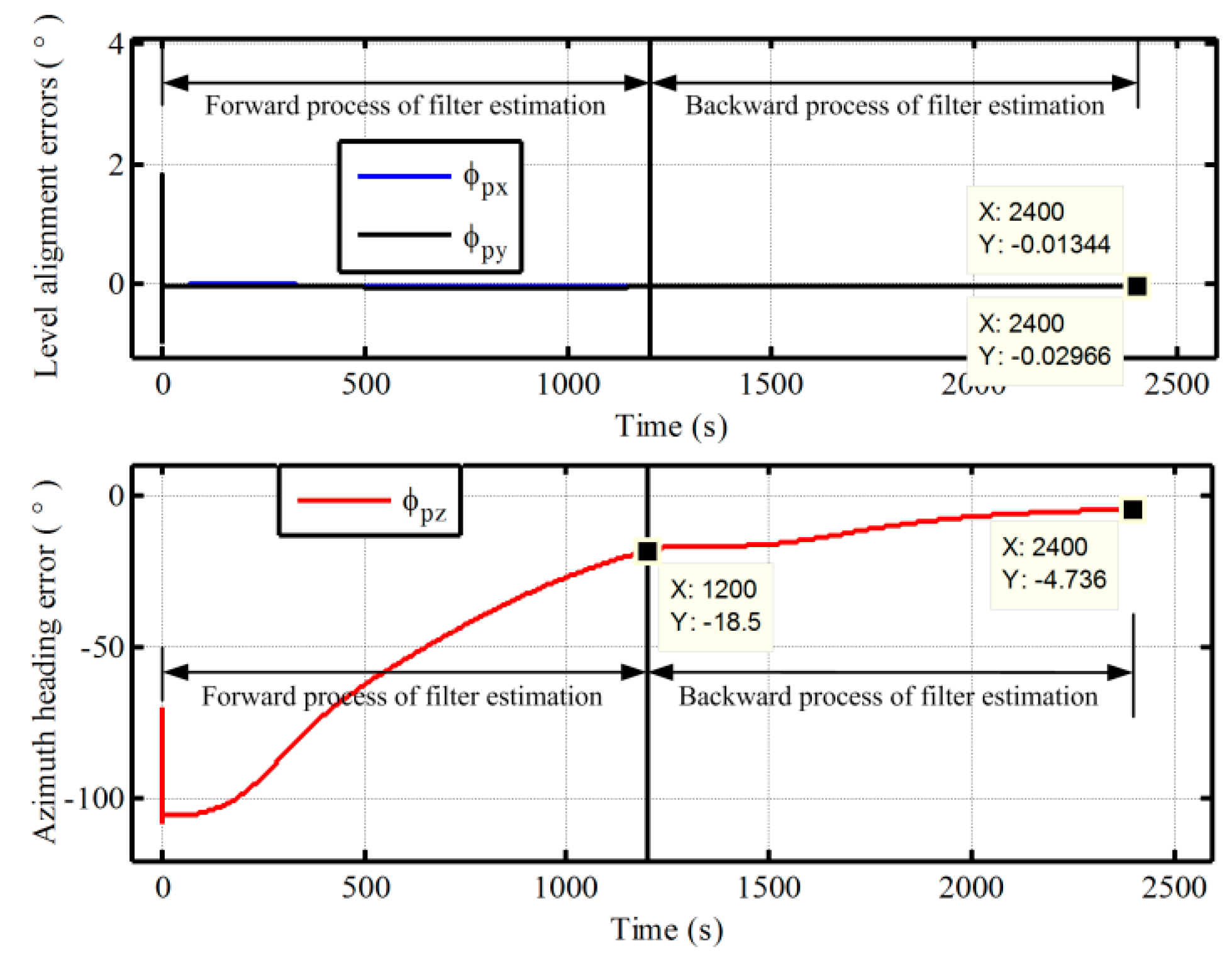
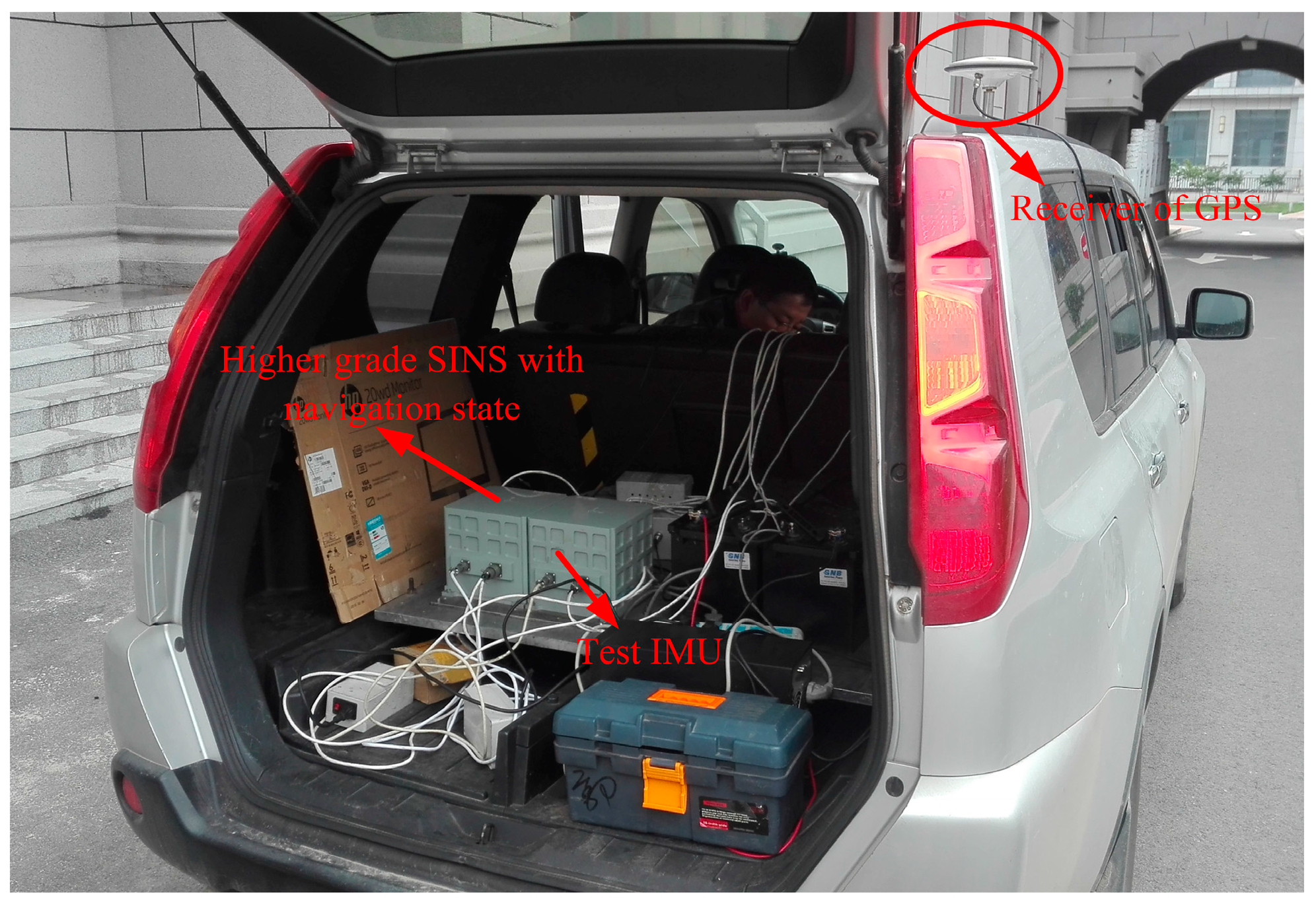
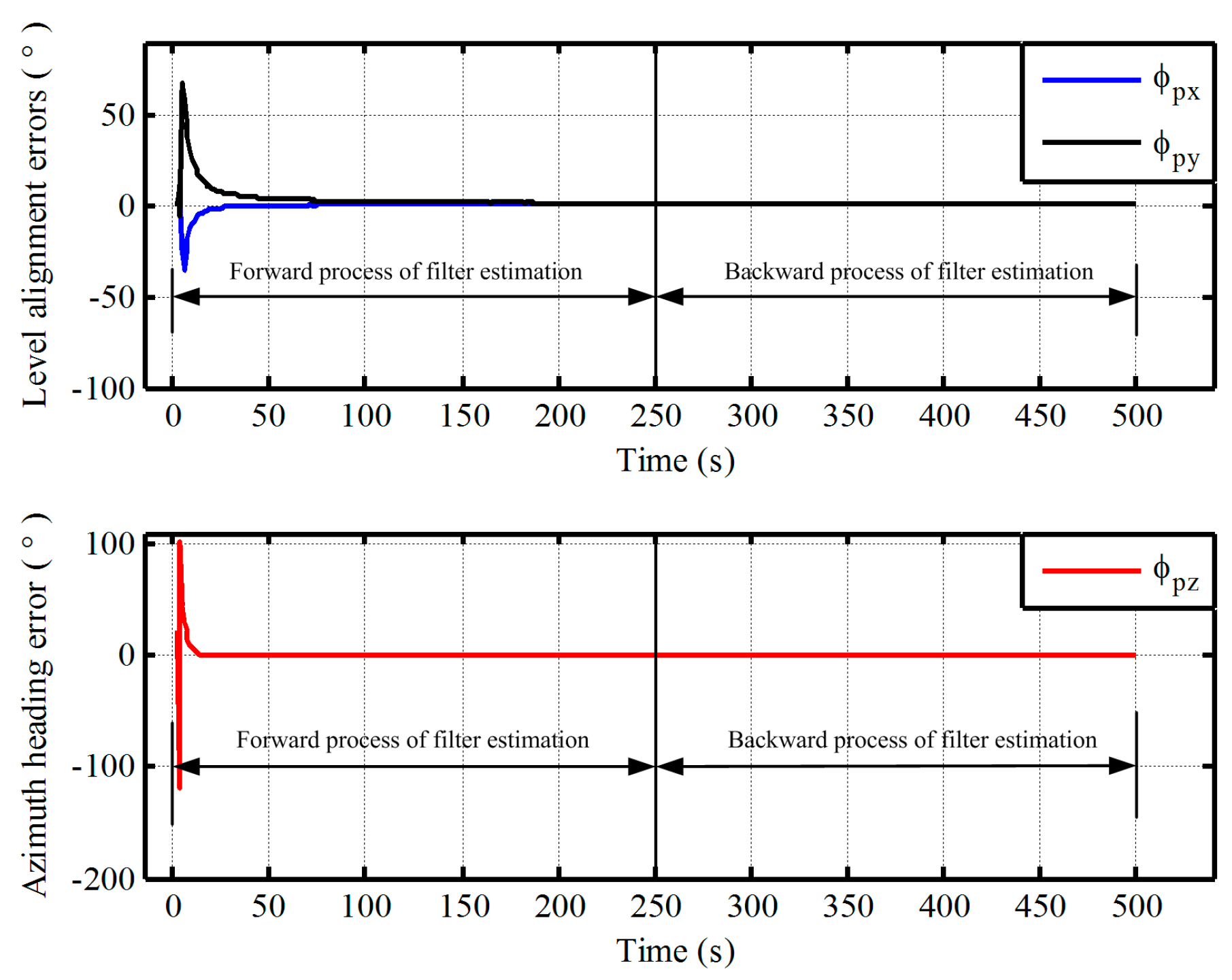
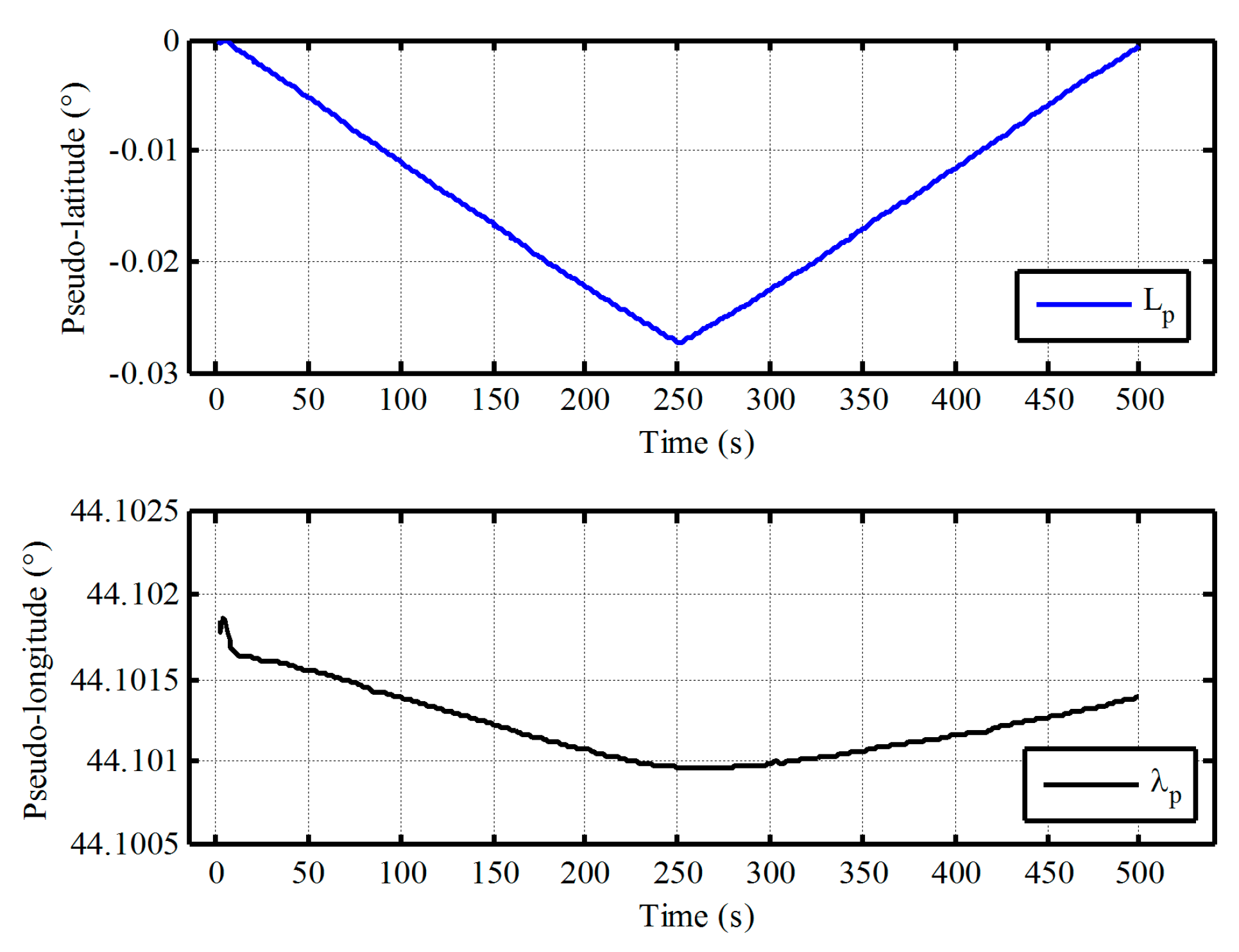
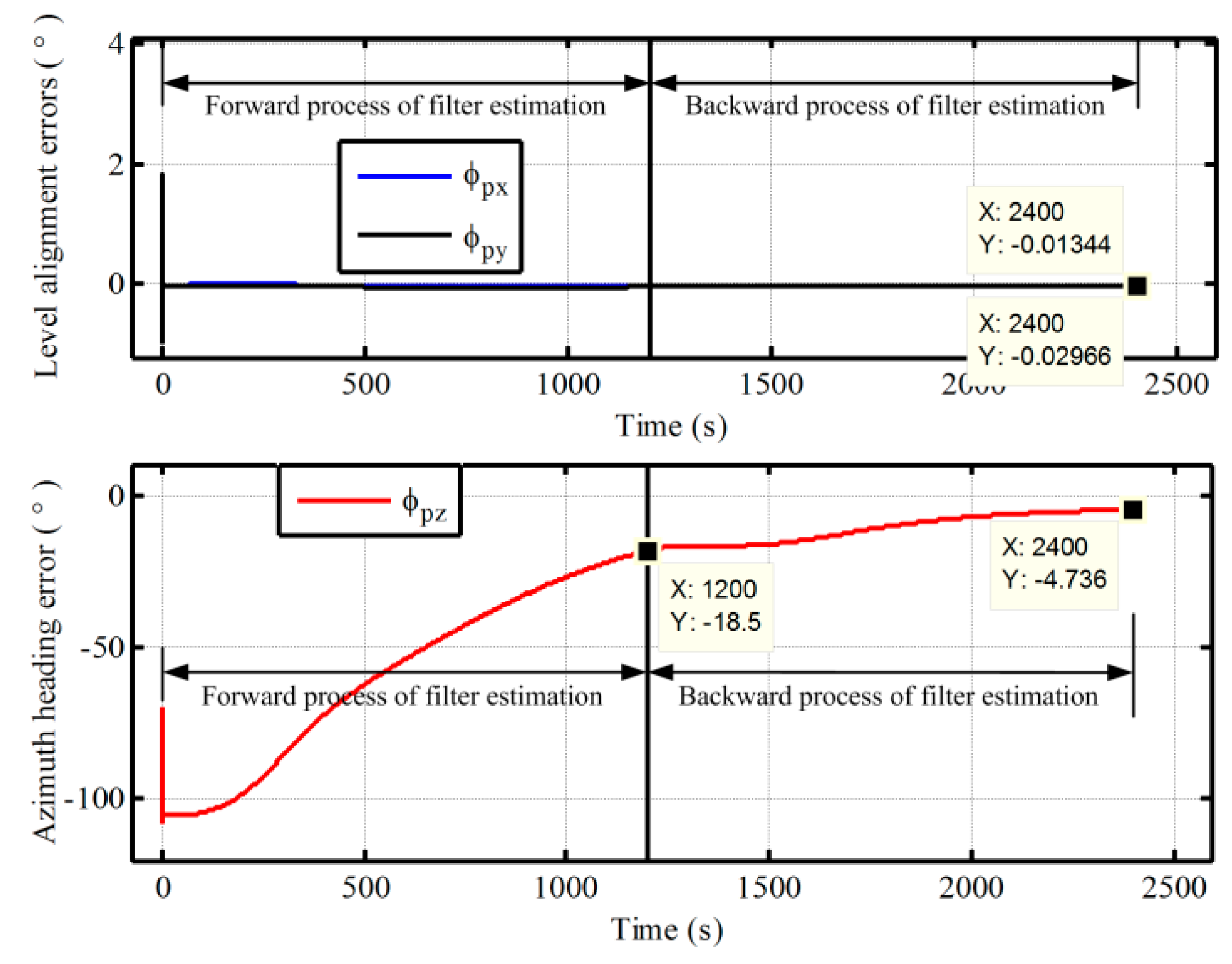
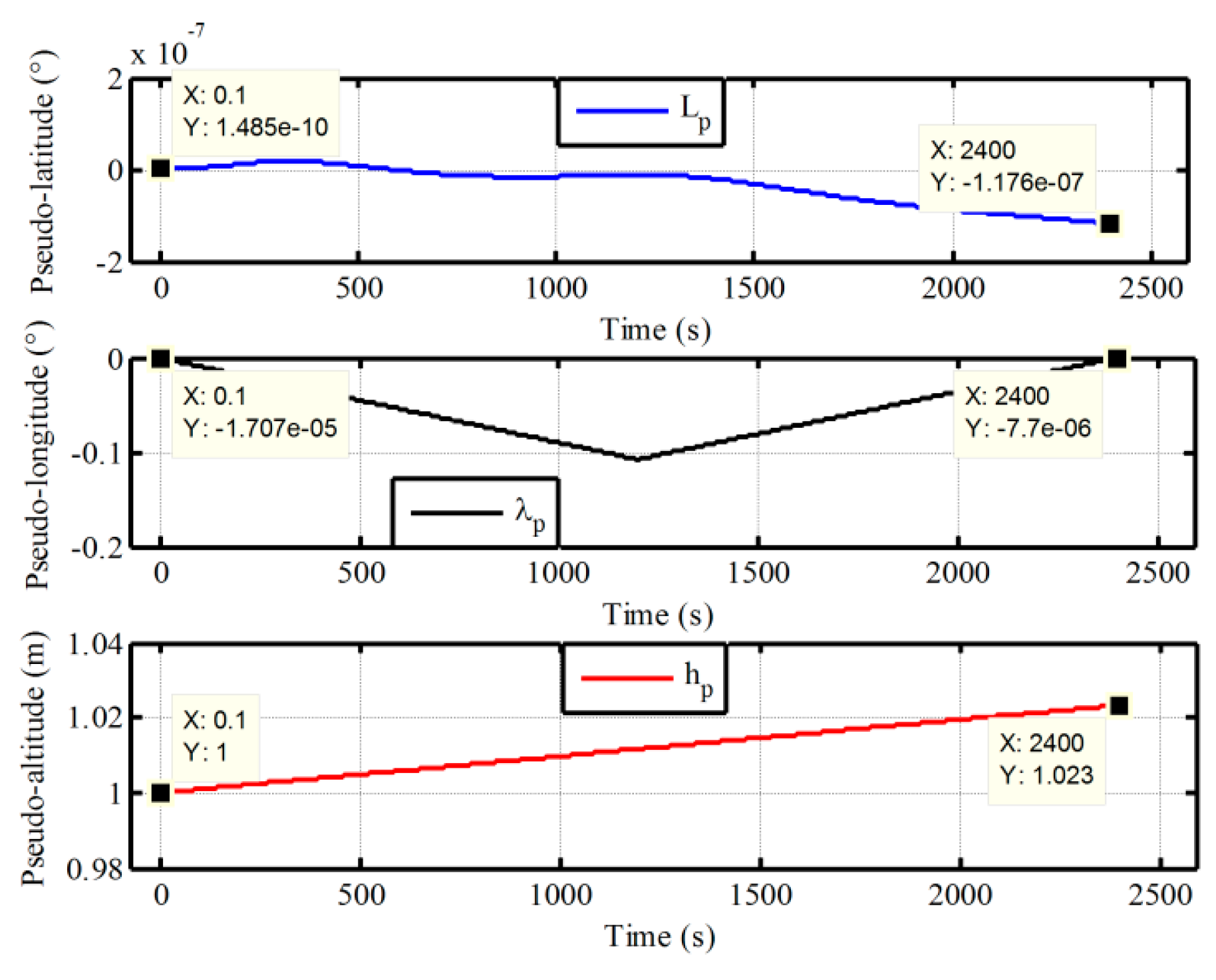
5.2. In-Motion Alignment Tests
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bame, S.J.; Hones, E.W.; Akasofu, S.I. Geomagnetic storm particles in the high-latitude magneto tail. J. Geophys. Res. 1971, 76, 7566–7583. [Google Scholar] [CrossRef]
- Ngwira, C.M.; Mckinnell, L.A.; Cilliers, P.J. GPS phase scintillation observed over a high-latitude Antarctic station during solar minimum. J. Atmos. Solar-Terr. Phys. 2010, 72, 718–725. [Google Scholar] [CrossRef]
- Andalsvik, Y.L.; Jacobsen, K.S. Observed high-latitude GNSS disturbances during a less-than-minor geomagnetic storm. Radio Sci. 2014, 49, 1277–1288. [Google Scholar] [CrossRef]
- Anderson, E.W. I—Navigation in Polar Regions. J. Navig. 1957, 10, 156–161. [Google Scholar]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; IET Inc.: Chicago, IL, USA, 2004. [Google Scholar]
- Core, G.D.; Nastro, V. A World-wide Mechanization in Inertial Navigation Systems. J. Navig. 1986, 39, 3. [Google Scholar] [CrossRef]
- Li, Q.; Ben, Y.; Yu, F. System reset of transversal strapdown INS for ship in polar region. Measurement 2015, 60, 247–257. [Google Scholar] [CrossRef]
- Salychev, O.S. Applied Inertial Navigation Problems and Solutions; The BMSTU Press: Moscow, Russia, 2004. [Google Scholar]
- Maclure, K.C. Polar Navigation. Arctic 1949, 24, 183–194. [Google Scholar] [CrossRef]
- Fox, W.A.W. Transverse Navigation: An Alternative to the Grid System. J. Navig. 1949, 2, 25–35. [Google Scholar] [CrossRef]
- Qi, Z.; Yue, Y.Z.; Zhang, X.D. Indirect grid inertial navigation mechanization for transpolar aircraft. J. Chin. Inert. Technol. 2014, 22, 18. [Google Scholar]
- Li, W.; Wu, W.; Wang, J.; Lu, L. A Fast SINS Initial Alignment Scheme for Underwater Vehicle Applications. J. Navig. 2013, 66, 181–198. [Google Scholar] [CrossRef]
- Xiong, J.; Guo, H.; Yang, Z.H. A Two-Position SINS Initial Alignment Method Based on Gyro Information. Adv. Space Res. 2014, 53, 1657–1663. [Google Scholar] [CrossRef]
- Silson, P.M.G. Coarse Alignment of a Ship’s Strapdown Inertial Attitude Reference System Using Velocity Loci. IEEE Trans. Instrum. Meas. 2011, 60, 1930–1941. [Google Scholar] [CrossRef]
- Qin, Y.Y. Inertial Navigation; Science Inc.: Beijing, China, 2006. [Google Scholar]
- Wu, Y.; Zhang, H.; Wu, M. Observability of Strapdown INS Alignment: A Global Perspective. IEEE Trans. Aerosp. Electron. Syst. 2011, 48, 78–102. [Google Scholar]
- Li, Q.; Ben, Y.; Sun, F. Transversal Strapdown INS and Damping Technology for Marine in Polar Region. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1365–1370. [Google Scholar]
- Sun, F.; Yang, X.; Ben, Y.; Liu, S.; Li, M. Polar Transfer Alignment Research Based on Inverse Coordinate System. J. Proj. Rocket. Missiles Guid. 2014, 34, 179–182. [Google Scholar]
- Yao, Y.Q.; Xu, X.S.; Li, Y. Transverse Navigation under the Ellipsoidal Earth Model and its Performance in both Polar and Non-polar areas. J. Navig. 2015, 1, 1–18. [Google Scholar] [CrossRef]
- Cheng, J.; Wang, T.; Guan, D. Polar transfer alignment of shipborne SINS with a large misalignment angle. Meas. Sci. Technol. 2016, 27, 35–101. [Google Scholar] [CrossRef]
- Li, Q.; Ben, Y.; Yu, F. Transversal Strapdown INS based on Reference Ellipsoid for Vehicle in Polar Region. IEEE Trans. Veh. Technol. 2016, 65, 7791–7795. [Google Scholar] [CrossRef]
- Yan, G.; Yan, W.; Xu, D. On Reverse Navigation Algorithm and Its Application to SINS Gyro-Compass In-Movement Alignment. In Proceedings of the 2008 CCC 27th Chinese Control Conference, Kunming, China, 16–18 July 2008; pp. 724–729. [Google Scholar]
- Hu, J.; Cheng, X. A new In-Motion Initial Alignment for Land-Vehicle SINS/OD Integrated System. In Proceedings of the Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 407–412. [Google Scholar]
- Alahyari, A.; Rozbahani, S.G.; Habibzadeh, A. INS/DVL Positioning System using Kalman Filter. Aust. J. Basic Appl. Sci. 2011, 5, 1123–1129. [Google Scholar]
- Feng, W.; Qin, Y.; Zhang, J. In-Flight Alignment Algorithm for Radar Aided SINS in Polar Regions. J. Northwest. Polytech. Univ. 2014, 32, 131–136. [Google Scholar]
- Liu, M.; Gao, Y.; Li, G. An Improved Alignment Method for the Strapdown Inertial Navigation System (SINS). Sensors 2016, 16, 621. [Google Scholar] [CrossRef]
- Gao, W.; Ben, Y.; Zhang, X.; Li, Q.; Yu, F. Rapid Fine Strapdown INS Alignment Method under Marine Mooring Condition. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2887–2896. [Google Scholar] [CrossRef]
- Chang, L.; Hu, B.; Li, Y. Backtracking Integration for Fast Attitude Determination-Based Initial Alignment. IEEE Trans. Instrum. Meas. 2015, 64, 795–803. [Google Scholar] [CrossRef]
- Estimation Techniques for Low-Cost Inertial Navigation. Available online: http://webee.technion.ac.il/control/info/Projects/Students/2010/Guy%20Rosenthal%20and%20Nir%20Ben%20Zrihem/WWW/unSDINS_dissertation.pdf (accessed on 31 May 2005).
- Chang, L.; Hu, B.; Li, A. Strapdown inertial navigation system alignment based on marginalised unscented kalman filter. IET Sci. Meas. Technol. 2013, 7, 128–138. [Google Scholar] [CrossRef]
- Fang, J.; Yang, S. Study on Innovation Adaptive EKF for In-Flight Alignment of Airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. Am. Control Conf. Proc. IEEE 1995, 3, 1628–1632. [Google Scholar]
- Li, J.; Song, N.; Yang, G. Fuzzy adaptive strong tracking scaled unscented Kalman filter for initial alignment of large misalignment angles. Rev. Sci. Instrum. 2016, 87, 790–798. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Errors | The Proposed Method | Traditional Transverse Method | ||
|---|---|---|---|---|
| Mean | Variance | Mean | Variance | |
| Pitch | 0.003108° | 5 × 10−7 | 0.005417° | 4.25 × 10−5 |
| Roll | −0.04375° | 7.63 × 10−4 | 0.07080° | 2.6 × 10−4 |
| Azimuth | −2.869° | 3.26 × 10−4 | −3.127° | 8.64 × 10−3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Liu, M.; Li, G.; Guang, X. Initial Alignment for SINS Based on Pseudo-Earth Frame in Polar Regions. Sensors 2017, 17, 1416. https://doi.org/10.3390/s17061416
Gao Y, Liu M, Li G, Guang X. Initial Alignment for SINS Based on Pseudo-Earth Frame in Polar Regions. Sensors. 2017; 17(6):1416. https://doi.org/10.3390/s17061416
Chicago/Turabian StyleGao, Yanbin, Meng Liu, Guangchun Li, and Xingxing Guang. 2017. "Initial Alignment for SINS Based on Pseudo-Earth Frame in Polar Regions" Sensors 17, no. 6: 1416. https://doi.org/10.3390/s17061416
APA StyleGao, Y., Liu, M., Li, G., & Guang, X. (2017). Initial Alignment for SINS Based on Pseudo-Earth Frame in Polar Regions. Sensors, 17(6), 1416. https://doi.org/10.3390/s17061416