1. Introduction
Safety is of profound significance in railways; for instance, the safety of trains running, the safety of rolling stock or wagons deaccelerating and stopping, safety monitoring, and anti-runaway prevention are few of the main operations at railway stations. For these reasons, many apparatuses are used at stations, particularly for stopping and anti-runaway prevention. Hand brakes, which are widely used in American railway marshaling stations, have strict application conditions; for instance, the wagon-type must be in accordance with the handbrake type, and the hand brakes should be handled manually [
1,
2]. Although, wheel chocks, which are also called brake skates since they work similar towheels of skates, are mainly handled manually, they perform better than hand brakes in wagon braking and stopping [
3]. Track skates can increase the friction between the wheels and tracks and can stop the railway wagons, and, thus, can be used for railway wagon anti-runaway prevention [
4,
5]. In Italian railways, brake skates are among the most popular devices used for wagon braking and stopping, owing to their simple structure, low cost, and effectiveness [
6]. In Chinese railways, the most popular anti-runaway prevention apparatus is the so-called track skates, which was brought in from Russia in the 1940s. Because of their ease of use, less power consumption, and economical and practical applications, track skates are widely used at all stations for anti-runaway prevention of rolling stocks. Track skates can be placed and moved conveniently, preventing rolling stocks’ anti-runaway effectively, and therefore, play a very significant role in railway safety [
7].
When rolling stocks are stopped on the tracks at stations where they are meant to stay for a long while, the handbrakes at the end of all departure tracks should be pulled, and the rolling stocks must be firmly fixed with the manually operated track skates. However, the real-time usage status of track skates is generally recorded manually by the yardmaster, who is responsible for recording all information of the yard at the stations. The information is displayed in the yard control room, which can inform the staff concerned about track skates about the rolling stocks’ operation status according to a series of labels attached to the information board. Even though the track skates’ usage status is carefully double-checked, there can be errors due to negligence, leading to serious accidents. If an unsuccessful anti-runaway prevention occurs, the rolling stocks may crash into other trains, resulting in casualties and major property damage. For instance, in 2007, the freight train 85209 originating from Lanzhou Railway Bureau slipped because of the misplaced track skates, and collided with passenger train N857, which stopped right after it. This accident caused the derailment of nine rolling stocks, luckily without hurting any passenger. In another instance, a freight train, with 47 rolling stocks, stayed in Yunnan Xuanwei Xiaoji Street station on 4 February 2008, and anti-ran into the direction of Guiyang and caused major casualties while crashing into the houses near the railway station. Another accident took place in 2013 in Golmud train station three at the Xining to Golmud section. A parked freight train waiting for marshaling slipped away to the Garham-Golmud station and collided with the passing train 7581, causing 50 injuries and one death.
To reinforce the safety operations of anti-runaway prevention, each station is equipped with a strict safety inspection system and an anti-slipping inspection team, which checks the anti-runaway prevention status and ensures proper operation of the system. However, because of a lack of necessary technology-monitoring measures for safety management, the anti-runaway safety checks can only rely on humans’ subjective consciousness and their sense of responsibility. Recently, loss or improper use/installation of track skates has caused a derailment, leading to frequent wheel slipping. Due to the widely distributed railway networks in China and several rolling stocks staying at railway stations every day, the management of the anti-runaway track skate system is a significant problem for railway operators.
Since a sensor with high-precision measurement of temperature, strain, vibration, and birefringence can find applications in almost all types of devices, it is increasingly popular in the railway industry [
8]. The use of sensors in applications such as detection of driver drowsiness [
9], detection of gases with low adsorption energy [
10], and measurement and analysis of train motion and railway track characteristics has been researched recently [
11]. According to a survey on wireless sensors for condition monitoring in the railway industry [
12], a broad range of sensors is used in railway monitoring to provide an extensive range of data and allow monitoring of different structures, vehicles, and machinery. In addition, the use of wireless sensornetworks inrailwayhas shown remarkable development in reducing human and material losses [
13]. To enable decision support in the railway infrastructure maintenance lifecycle, the sensor data from wireless sensornetworks need to be translated into relevant and clear information. Using a wireless real-time communication system, the train integrity functionality can be strongly enhanced [
14]. Reviewing the literature, we found that the operation of manually monitored, traditional track skates faces several severe problems. First, it is difficult to make sure that the track skates are placed properly. Second, the anti-runaway prevention information needs to be recorded, transferred, and handled manually, which has many potential security risks. Third, the track skates are likely to get stolen due to the open and complexity circumstances. Consequently, it takes much more staff to secure the railway cargo anti-runaway, especially in China. This lag in the anti-runaway prevention mechanism mismatches the other advanced railway technologies and is one of the bottlenecks constraining the overall service level of the railway.
To bridge this gap, we developed a new anti-runaway prevention system (ARPS) based on intelligent track skates, which are equipped with detection and communication sensors, using the technologies of wireless communication sensors. This system focuses on monitoring the real-time status of the track skates and is applicable to arrival and departure tracks with slopes as well as specialized lines with a steep slope and other station tracks with a potential slipping due to the natural environment. Without changing the original track skate operation process, this system applies a radio frequency network and the developed micro-power wireless communication module to transmit information that is detected and collected by the sensors installed in the track skates, to realize automatic recognition of the installation/uninstallation status of the track skates. The real-time status of the track skates can be dynamically shown on the screen at the control center, using the real-time monitoring and management system. ARPS prevents accidents effectively, such as derailment and anti-runaway caused by loss or improper use/installation of track skates, and, thus, enhances safety and avoids errors caused by negligence in the operation of railway cargo anti-runaway prevention.
The remainder of this paper is organized as follows. The improvements in anti-runaway prevention based on the intelligent track skates equipped with detecting and communicating sensors are depicted in
Section 2. The design of intelligent track skates is discussed in
Section 3. The design of a real-time monitoring and management system is proposed in
Section 4. The test and practices are described in
Section 5. The conclusions are summarized in
Section 6.
2. Improvements in Intelligent Track Skates Equipped with Sensors
The main concept of improvements made in intelligent track skates is to boost the current anti-slipping apparatus without changing the physical operation processes of the current track skates, and simplify the operation of the railway staff. The operation process of the current track skates is as follows:
- (1)
To set the track skates, the shunting warden initially gives instructions to the shunting staff after the rolling stocks stop at the reserved spots, and then the staff take the track skates from the custodian at the station and reach the specialized track to install the track skates after being notified about the track skate installation. During this process, the shunting team informs the shunting warden face-to-face or via radio about the completion of the installation, and the shunting warden draws a hand-painted skate symbol on the station line board.
- (2)
To release (move) the track skates, the shunting warden informs the shunting team to take down the track skates from the track, and then erases the related symbol on the information board after the trains have departed from the station.
The mentioned operation process above has apparent shortcomings, the most important being the interaction safety affirmation between the staff. The shunting warden might not obtain the status information of the missive installation or release of the track skates, or might not be aware of the lost track skates, which may result in serious accidents.
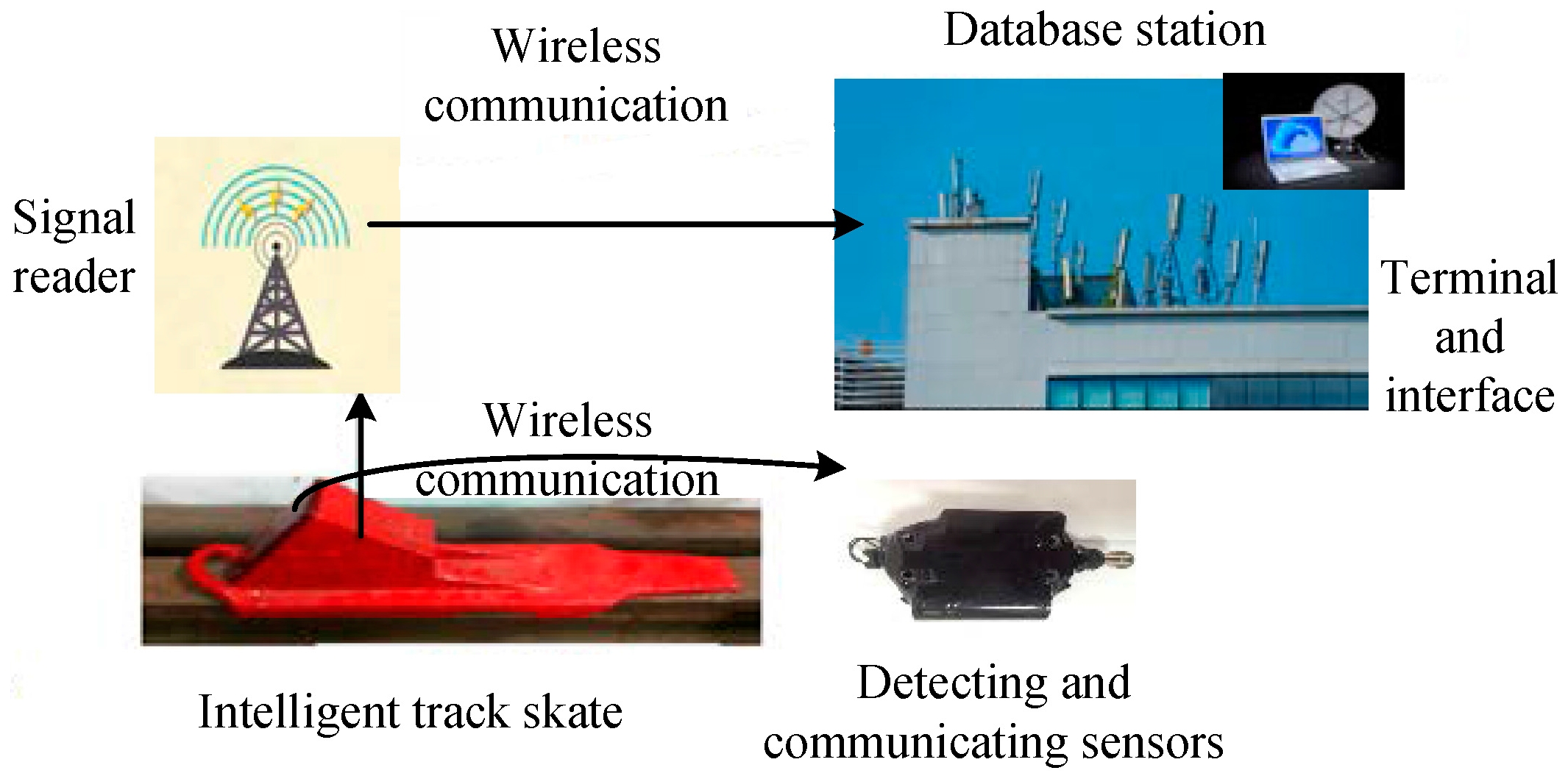
Using the intelligent track skates equipped with detecting and communicating sensors, a double-check closed-loop ARPS based on the intelligent track skates was established, whose composition and work process are shown in
Figure 1. In this system, four modules, including intelligent track skates with detecting and communicating sensors, a signal reader, a database station, and a monitoring system, realize the basic functions from the following three aspects:
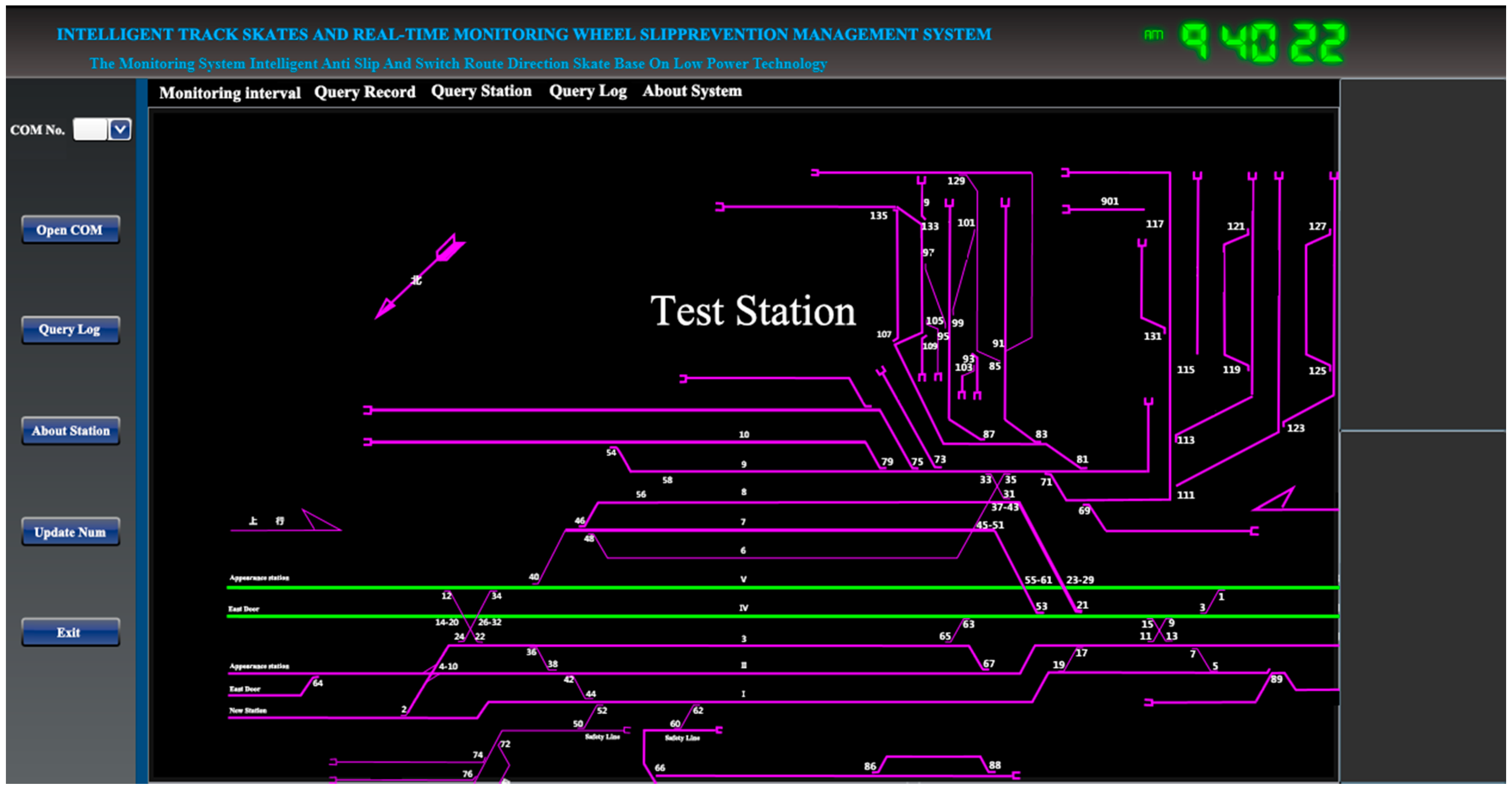
First, for preventing accidents caused by improper use/installation of track skates, the system sends information about track occupation status through the sensors installed in the intelligent track skates after installation completion. The shunting warden can double-check the usage status of the track skates in the monitoring system after the reporting of successful placement by the system. The shunting warden can also input and alter the information about the real-time status of parked rolling stocks provided by other shunting staff, and this double-check action will make it easier for the station signalmen and other related staff to know the real-time status of the entire station.
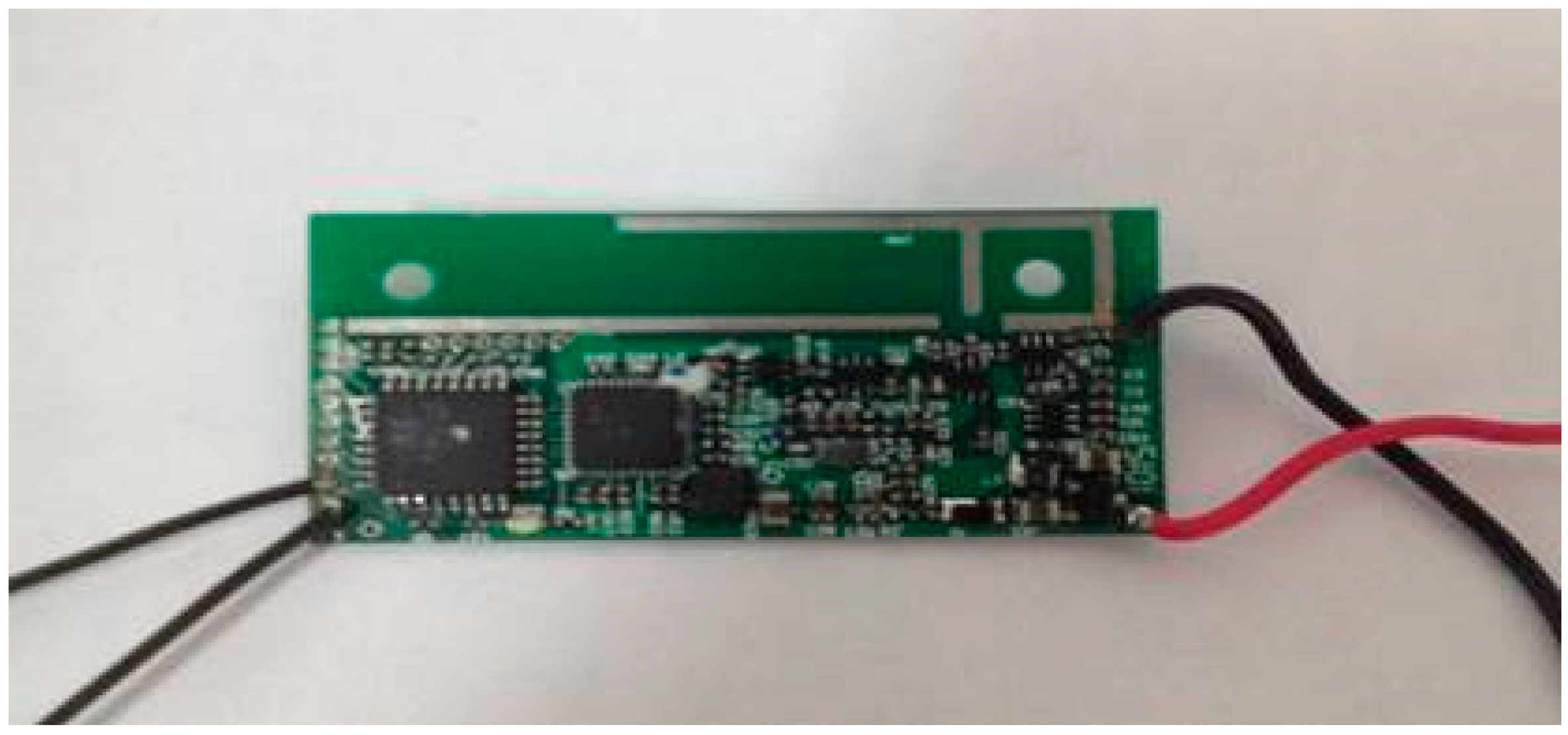
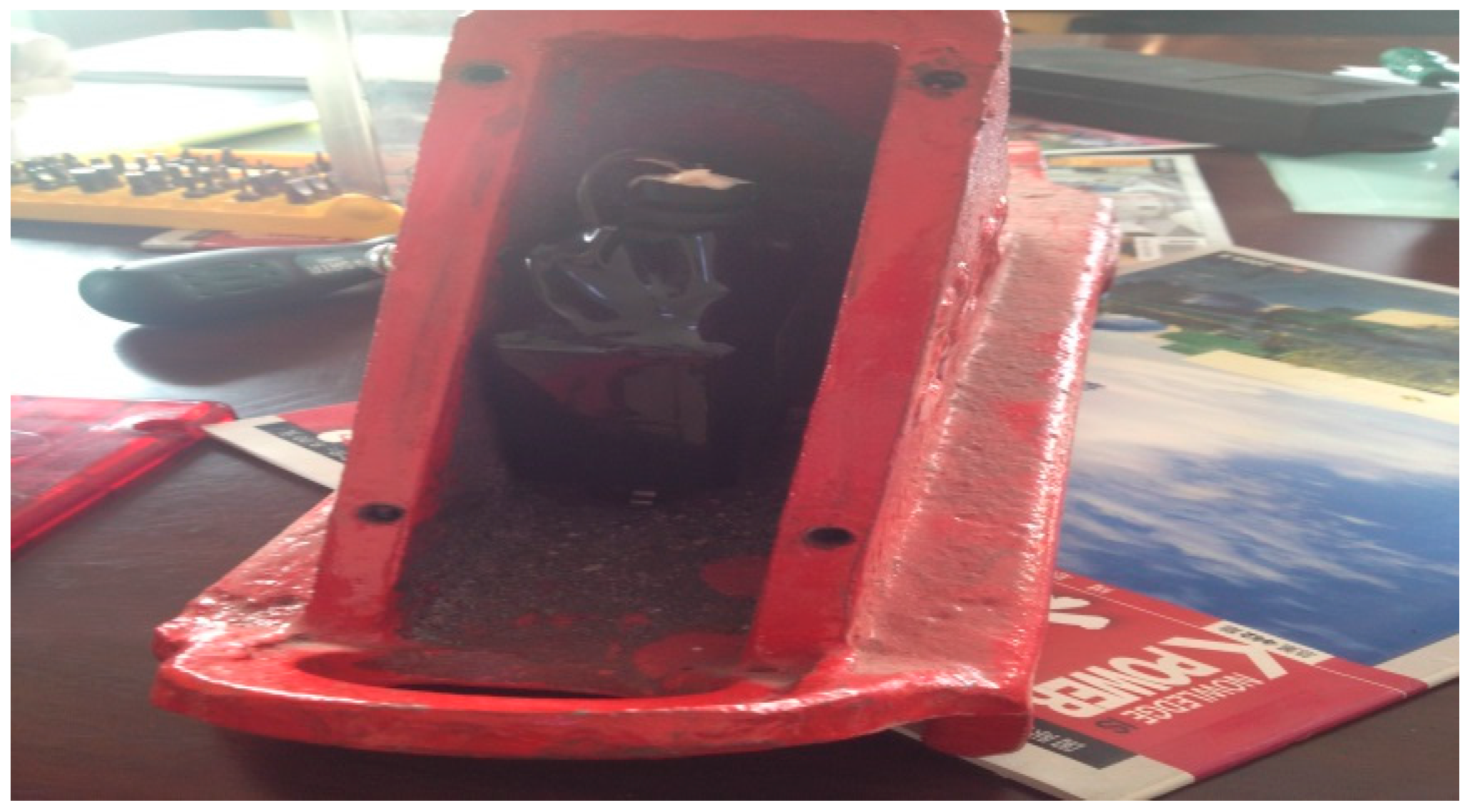
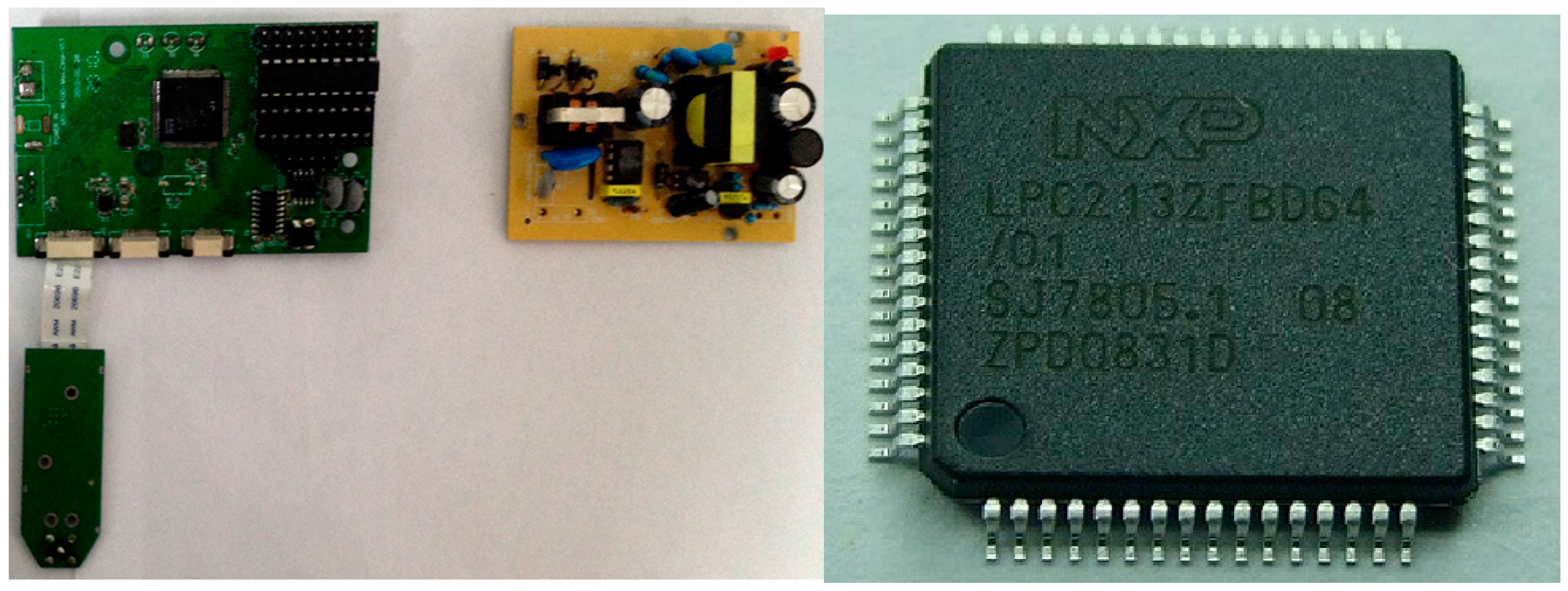
Second, for accidents caused by improper uninstallation of track skates by the shunting team, the sensors can send off-track signals when uninstallation of track skates occurs. The shunting warden will receive signals according to the abnormal status of the track skates and check the relative on-track status of the track skates. The intelligent track skates equipped with detecting and communicating sensors can provide real-time on-track information when track skates are placed properly. The sensors will trigger the on-track inspection switch with its own gravity, and connect the lithium batteries with a wireless transceiver circuit. Then, the state of the wireless transceiver circuit will change from sleep to work, and the microcontroller chip in the track skate will send an on-track signal to the wireless communication module. After obtaining the direct-sequence spread spectrum and high-frequency modulation by the amplifier circuit, the wireless communication module will send the required/related data to the reader. The sensors of the wireless communication system form the core module of the intelligent track skates, since the performance of the track skates mainly depends on the operation efficiency and accuracy of the sensors. Only when the sensors are installed with the effective wireless communication module canthe data collected in the marshaling yard be transmitted with high efficiency.
Third, in the case the on-track skates are stolen or do not work in the required state for unknown reasons, the shunting warden can receive signals timely. Then, the shunting warden can arrange relative inspections with the staff according to the abnormal situation of the track skates, and, correspondingly, respond to the inspection results to avoid potential accidents. With the closed-loop status of the track skates, the correct layout and work status can be guaranteed.
6. Conclusions
ARPS is the most widely used anti-slipping apparatus at railway stations. Using the existing track skates, the operators are unable to obtain real-time dynamic information about the usage status of track skates. In the case the track skates are stolen, the on-site staff violate the rules and regulations, or a track skate is not placed at the exact designated position, accidents are likely to occur. Confronted with problems in the operation process of track skates, we developed an intelligent track skate equipped with sensors and real-time monitoring and management system. The proposed system can send real-time on-track information of the track skates status, coping with the problems of the current operation process of track skates, which mainly relies on human intervention and is prone to accidents caused by improper installation or abnormal situations. The proposed system can reduce the loss or improper use/installation of track skates, preventing the anti-runaway of railway rolling stocks, to enhance safety and avoid errors due to negligence in operation.
Harbin Railway Bureau has 123 heavy-workload railway stations within 406 stations in total, which requires continuous real-time monitoring for ensuring the safety of anti-runaway operation for parked rolling stocks. The system can be used for 18 railway bureaus, specifically for about 2000 stations across China, to improve the safety management of railway stations.
The real-time monitoring and management system of ARPS still has some issues that need to be improved. First, this system is still unable to help track skates obtain accurate positions, even though the precise locations of track skates on the tracks are not absolutely necessary under the existing operation process. If intelligent track skates can send more effective information, it will undoubtedly make the whole system safer for the railway. Second, the proposed intelligent track skates can only adapt to a communication distance of within 750m in China, and cannot be applied in North America as many classification yard tracks there are over 1000 m in length. Thus, we need to try other sensors with a longer communicate distance to realize the balance between cost and efficiency. Finally, the function of recording and analyzing the status of anti-runaway prevention should be carried out automatically in the future.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}