
An Efficient Wireless Recharging Mechanism for Achieving Perpetual Lifetime of Wireless Sensor Networks


Abstract
:1. Introduction
- (1)
- Recharging while moving:This paper presents and implements the concept of “recharging while moving”. The mobile recharger therefore can efficiently move along the path with a constant speed.
- (2)
- Guarantee that each sensor can be fully recharged:A recharging segment is analyzed and constructed such that the mobile recharger moving along the segment of each sensor can guarantee that each sensor is fully recharged.
- (3)
- Joint mobility and energy recharging:As far as we know, this is the first work that allows the recharger to be moved with a constant speed while each sensor can be fully recharged by mobile recharger.
- (4)
- Reducing the length of recharging path:
2. Related Works
2.1. Energy Replenishment by the Environmental Energy Resources
2.2. Energy Replenishment by Mobile Rechargers
3. Network Environment and Problem Formulation
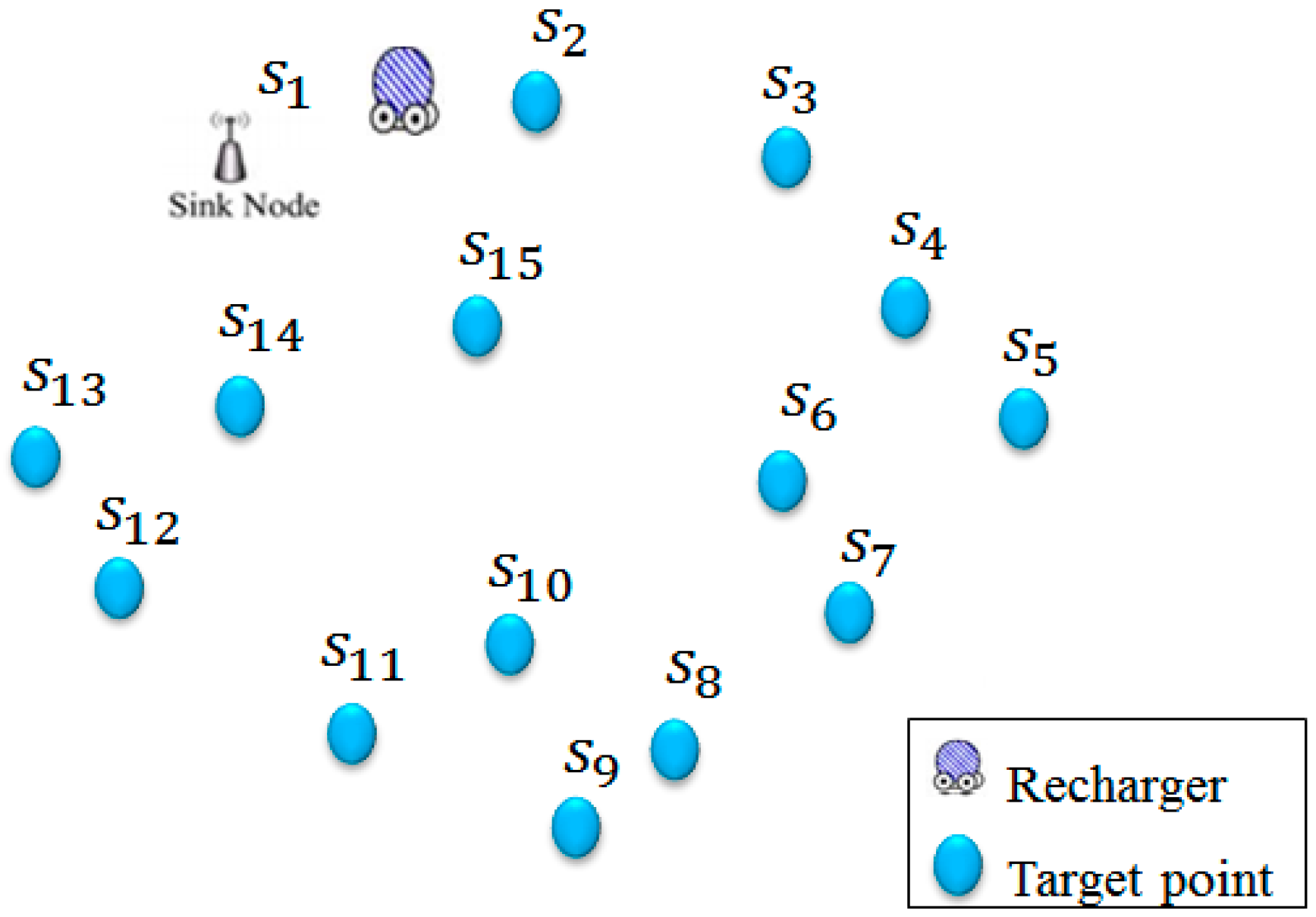
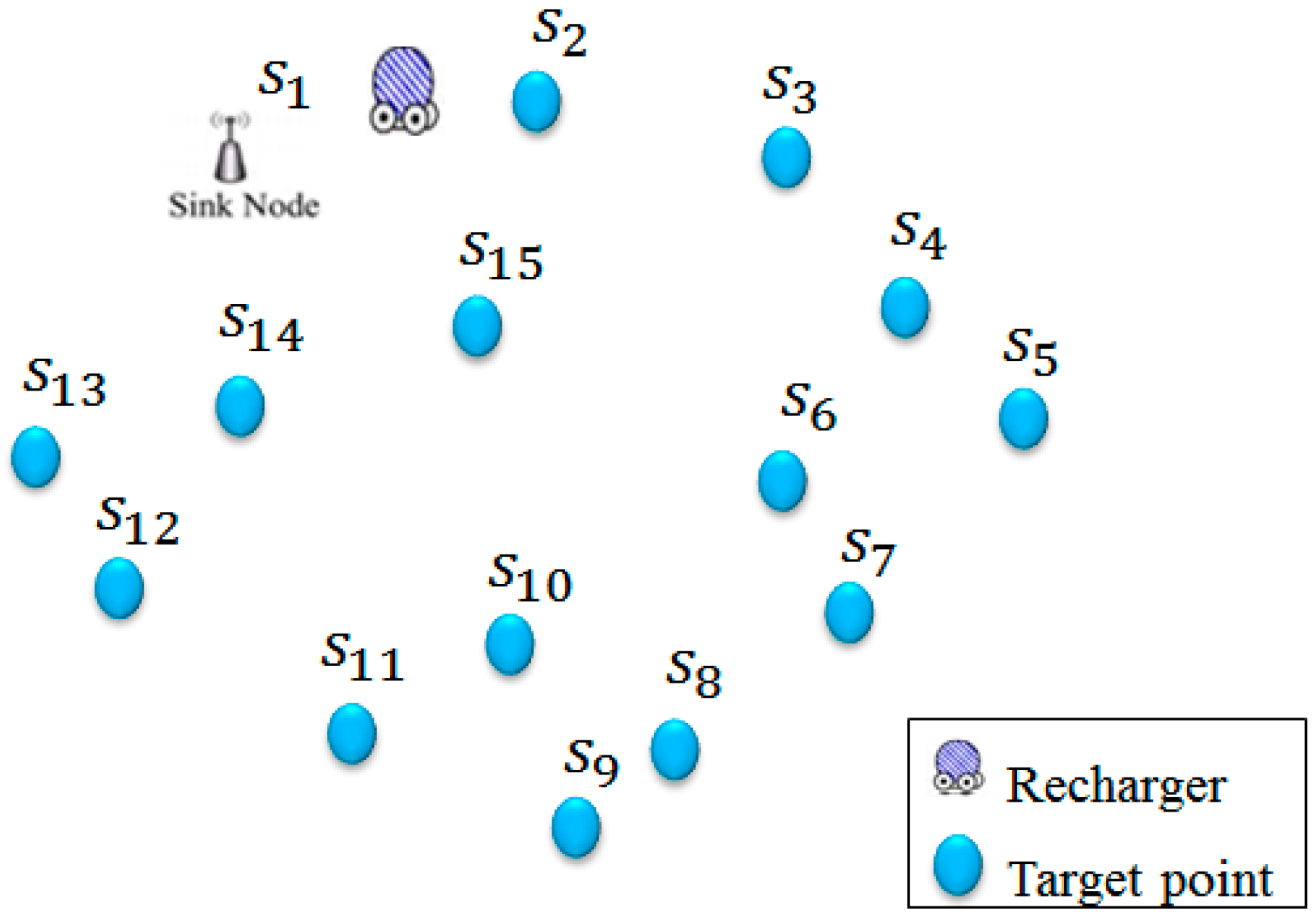
3.1. Network Environment
3.2. Problem Formulation
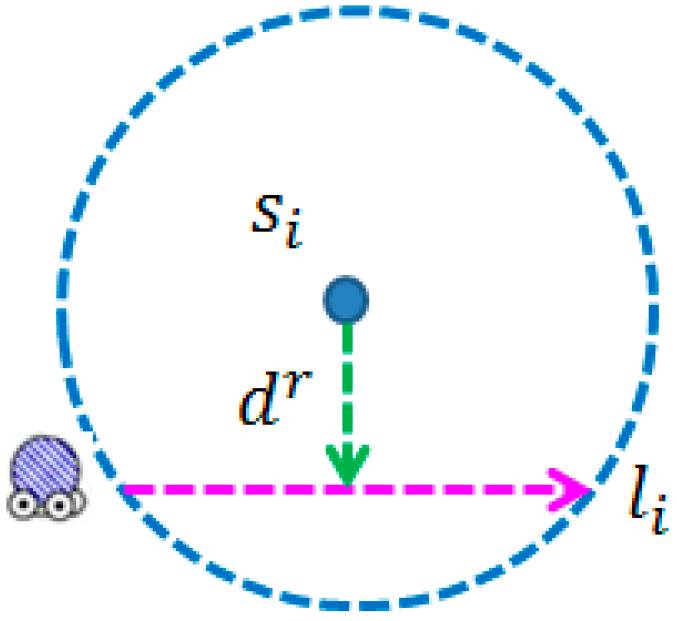
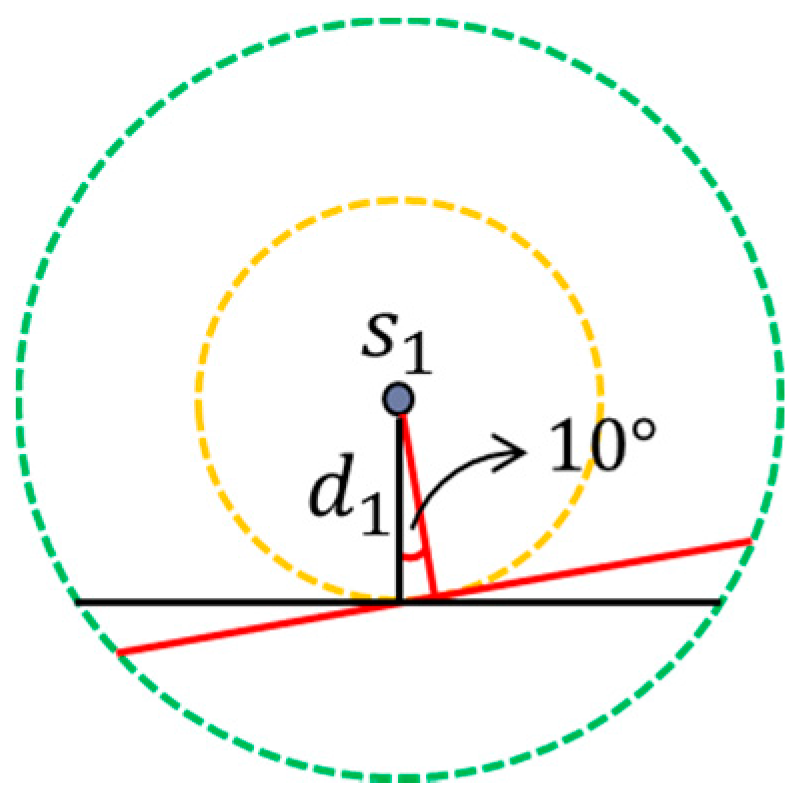
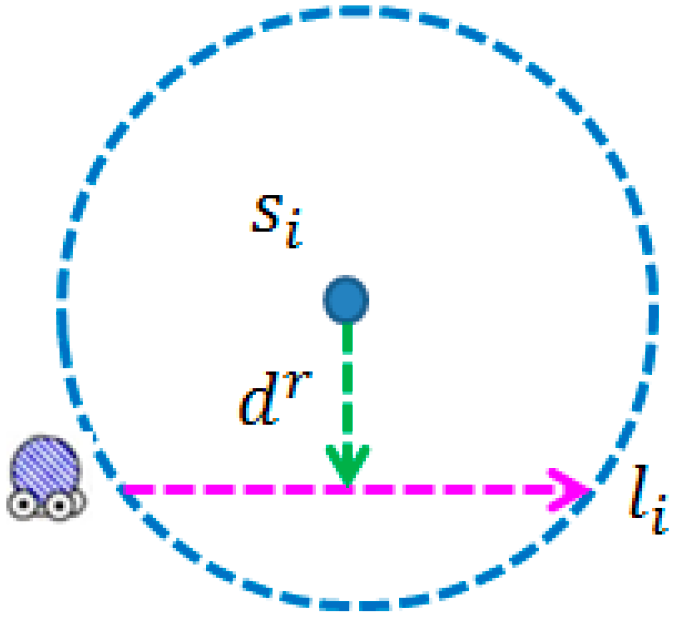
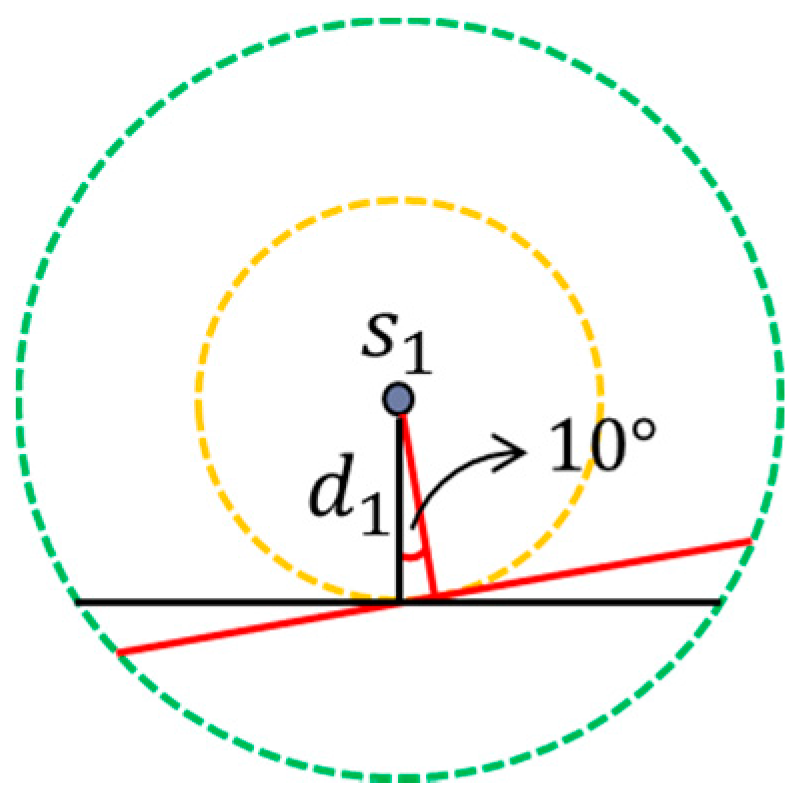
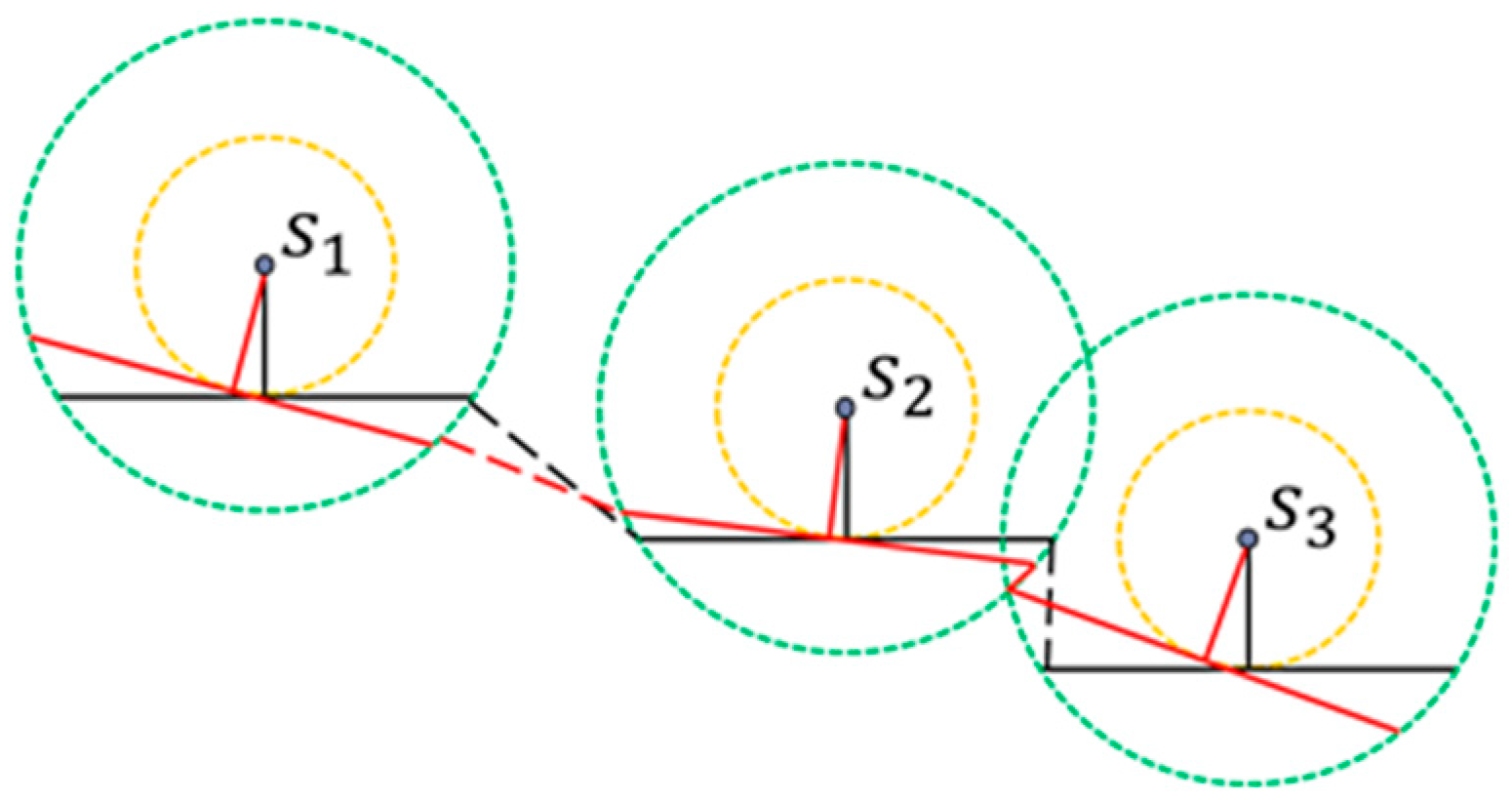
3.3. Sensor Recharging Model
4. Recharging Path Construction (RPC) Algorithm
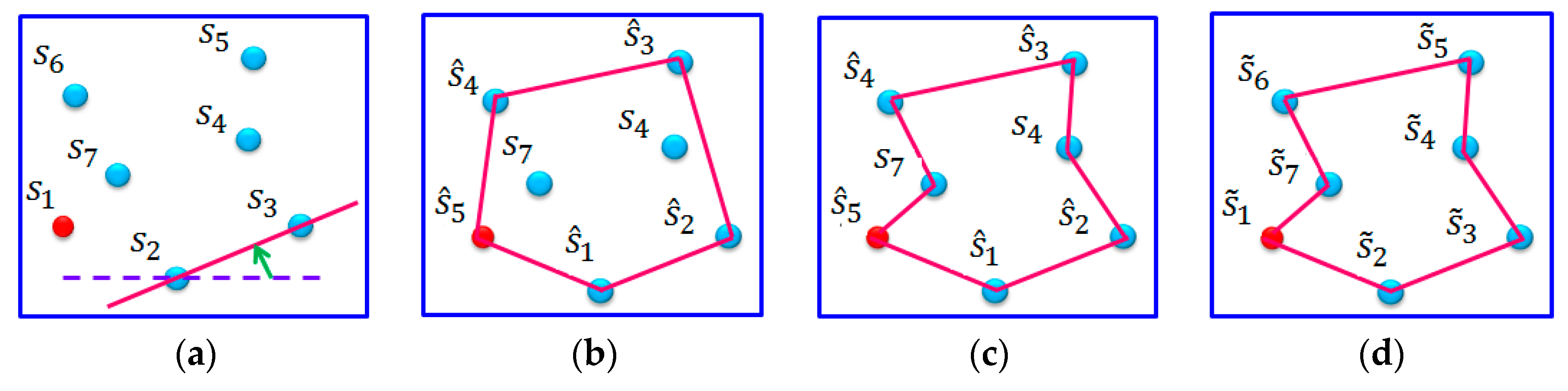
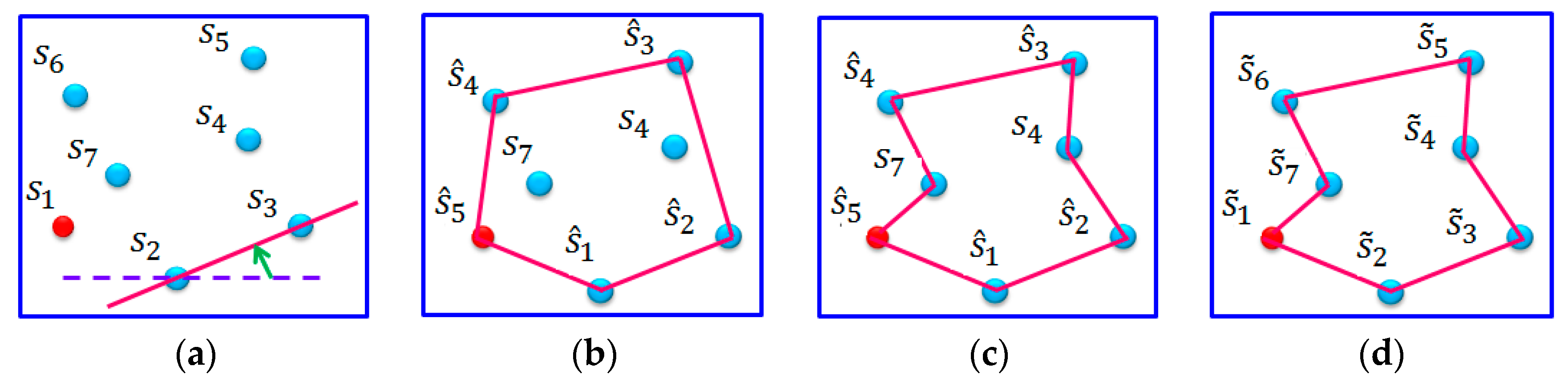
4.1. Initial Recharging Path Construction (IRPC) Phase
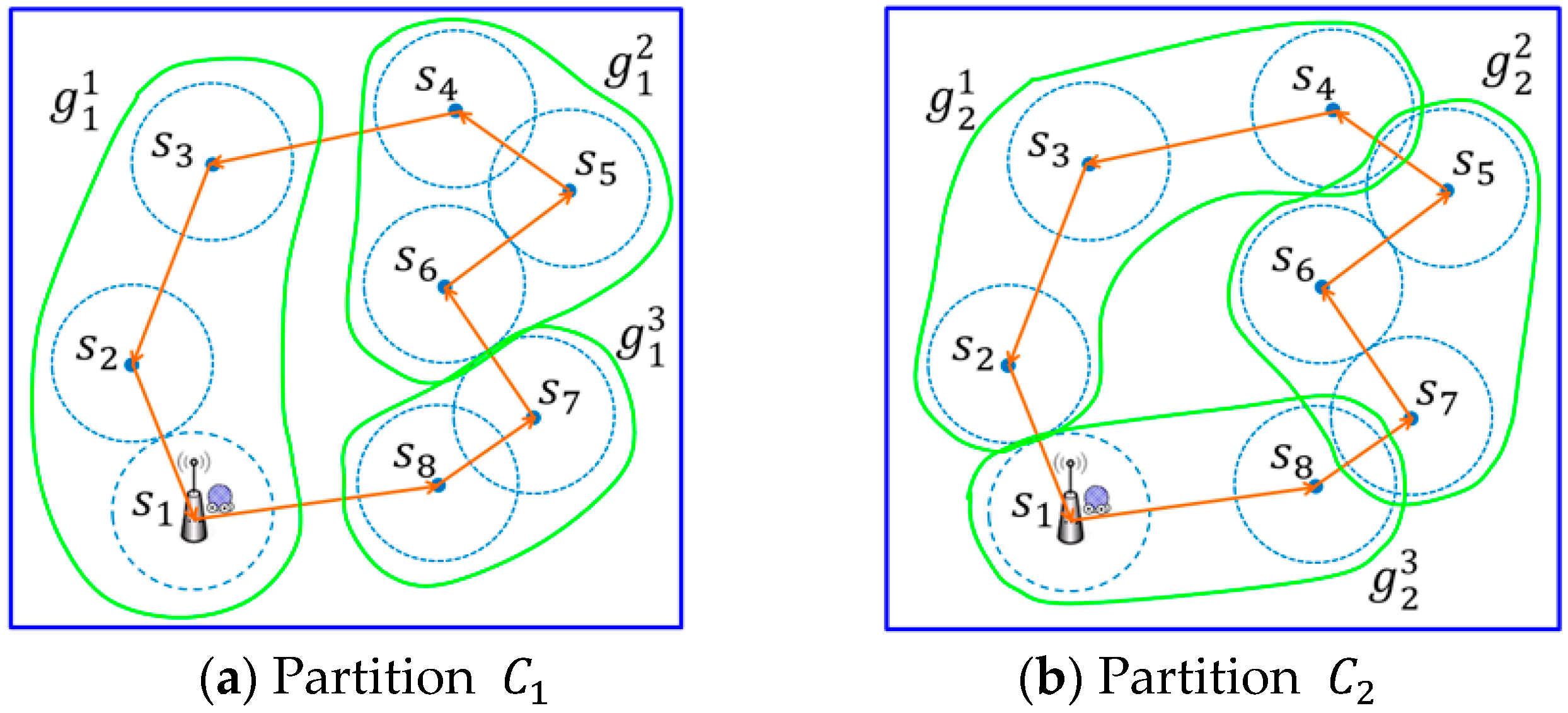
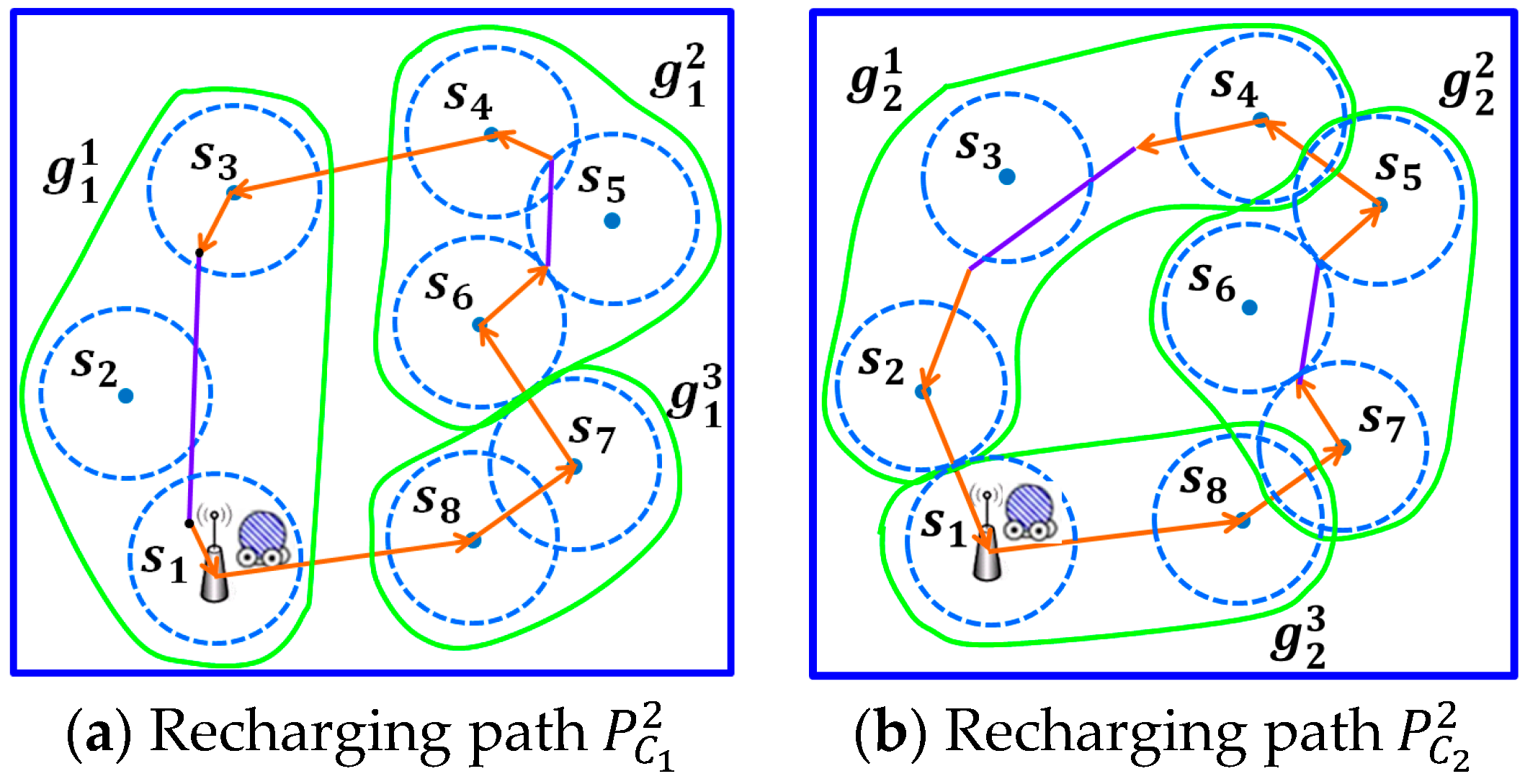
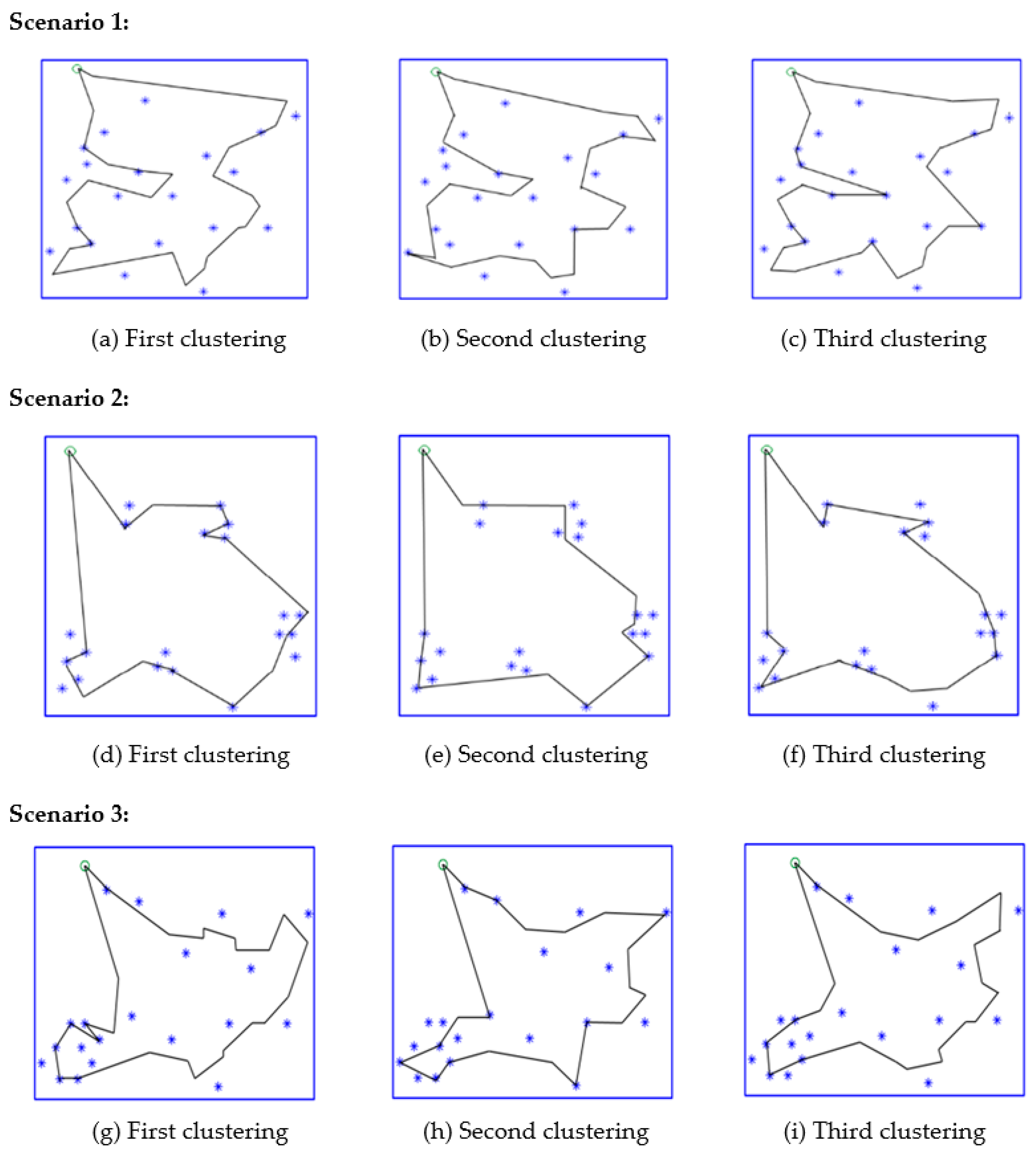
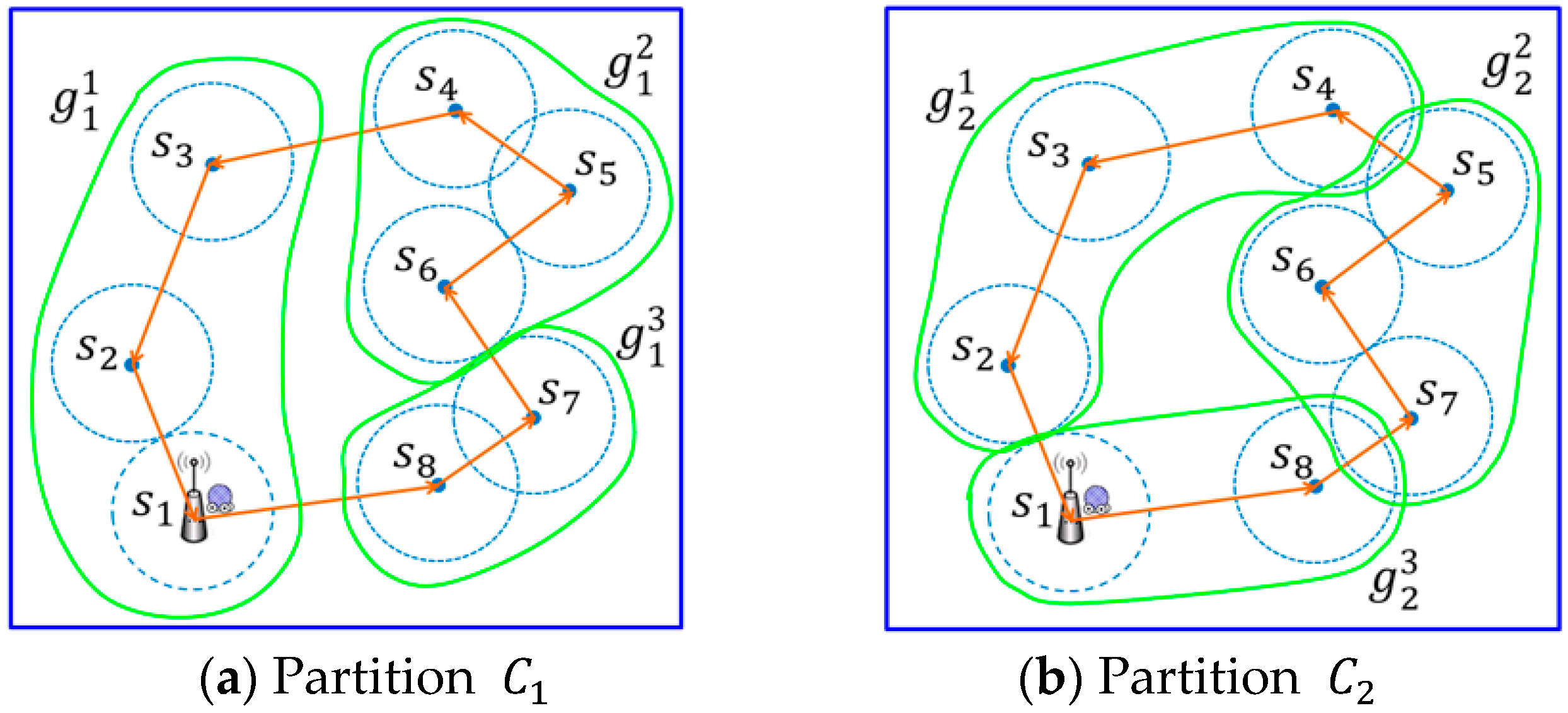
4.2. Partitioning Phase
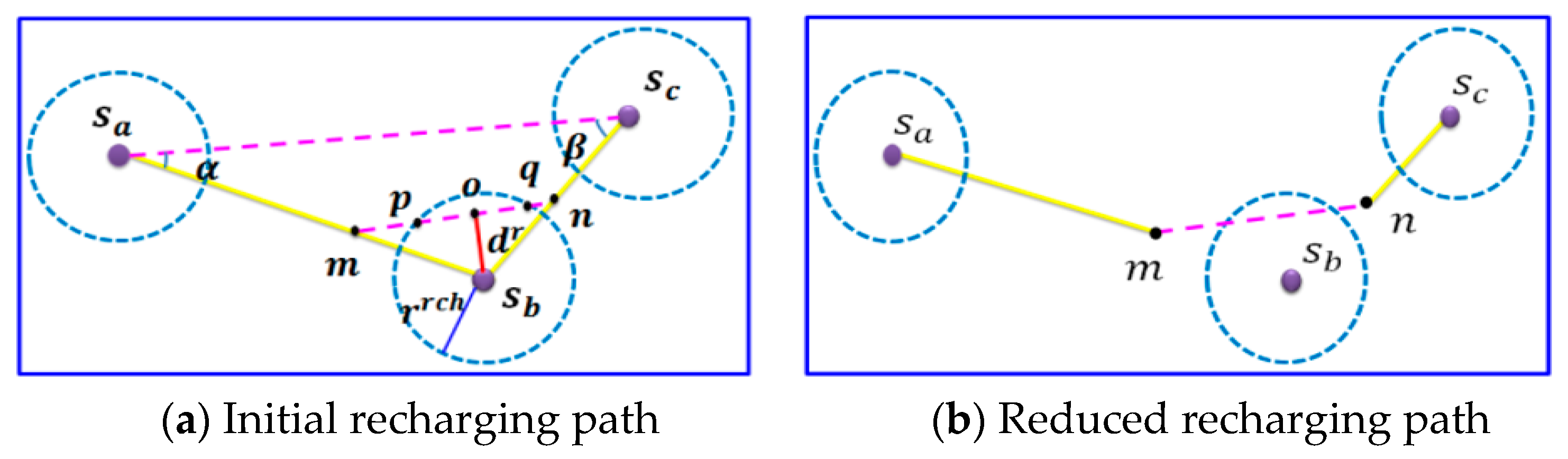
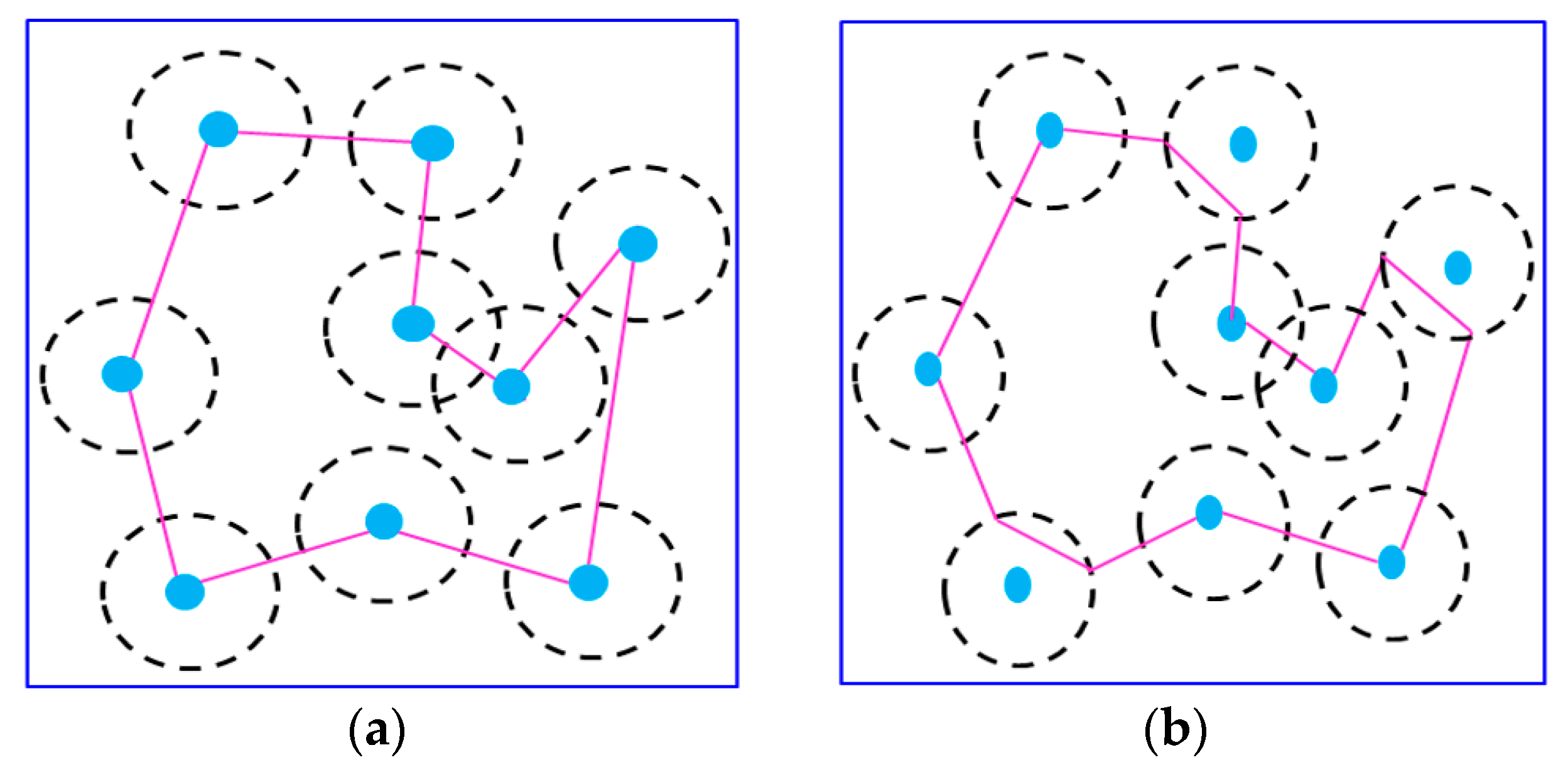
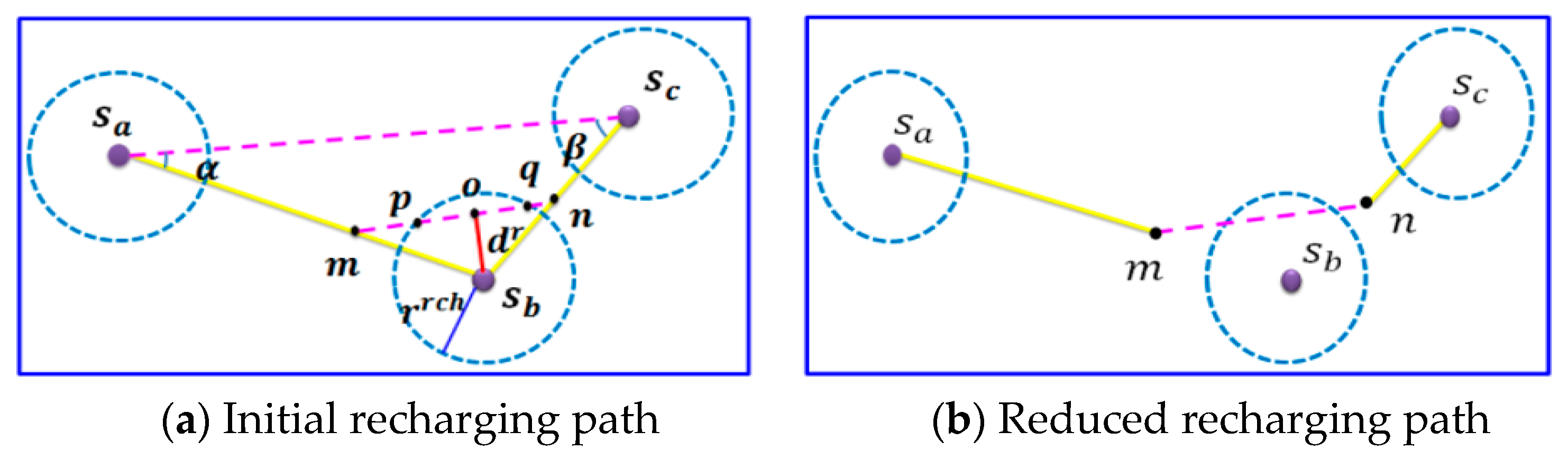
4.3. Inner-Group Path Reduction Phase
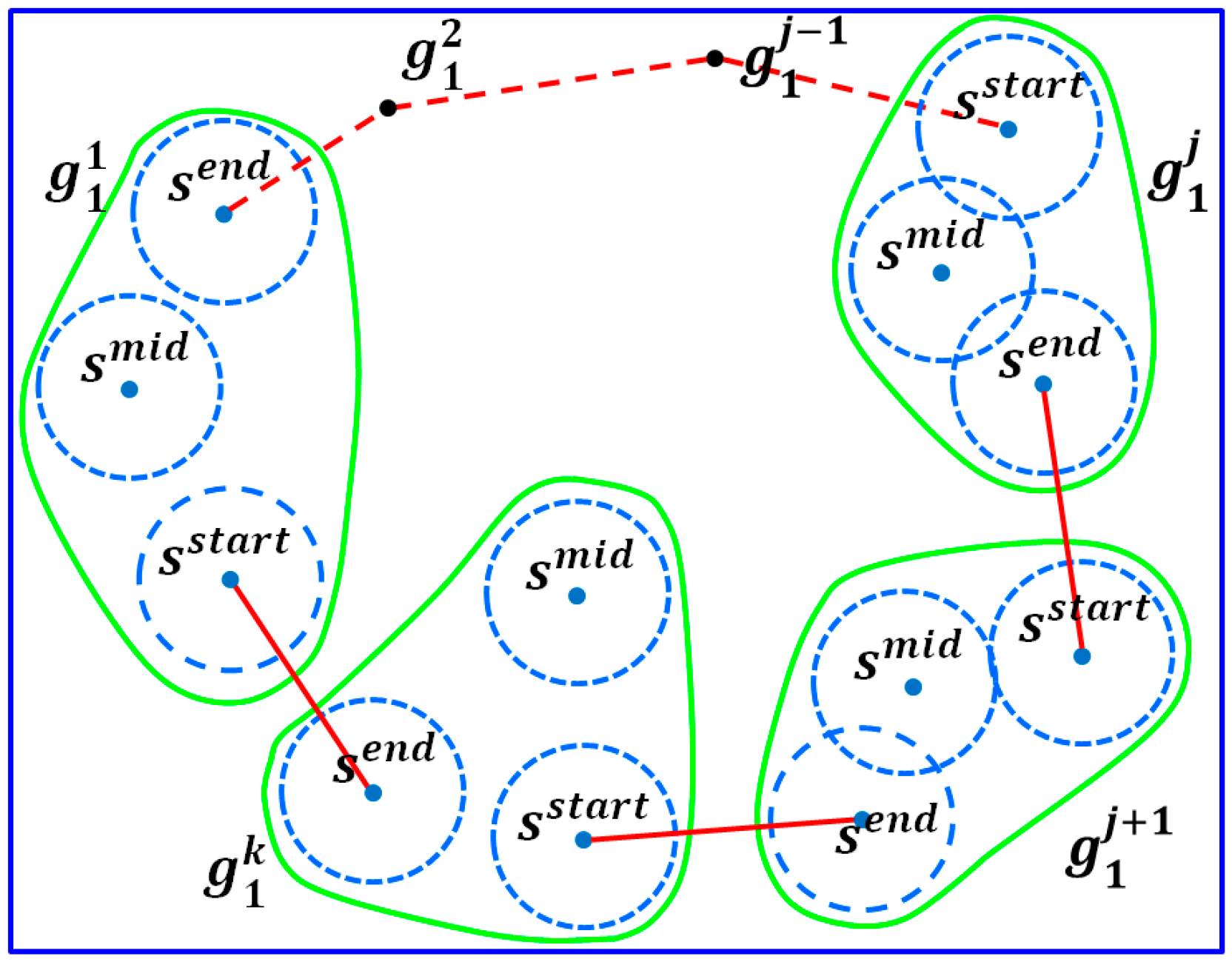
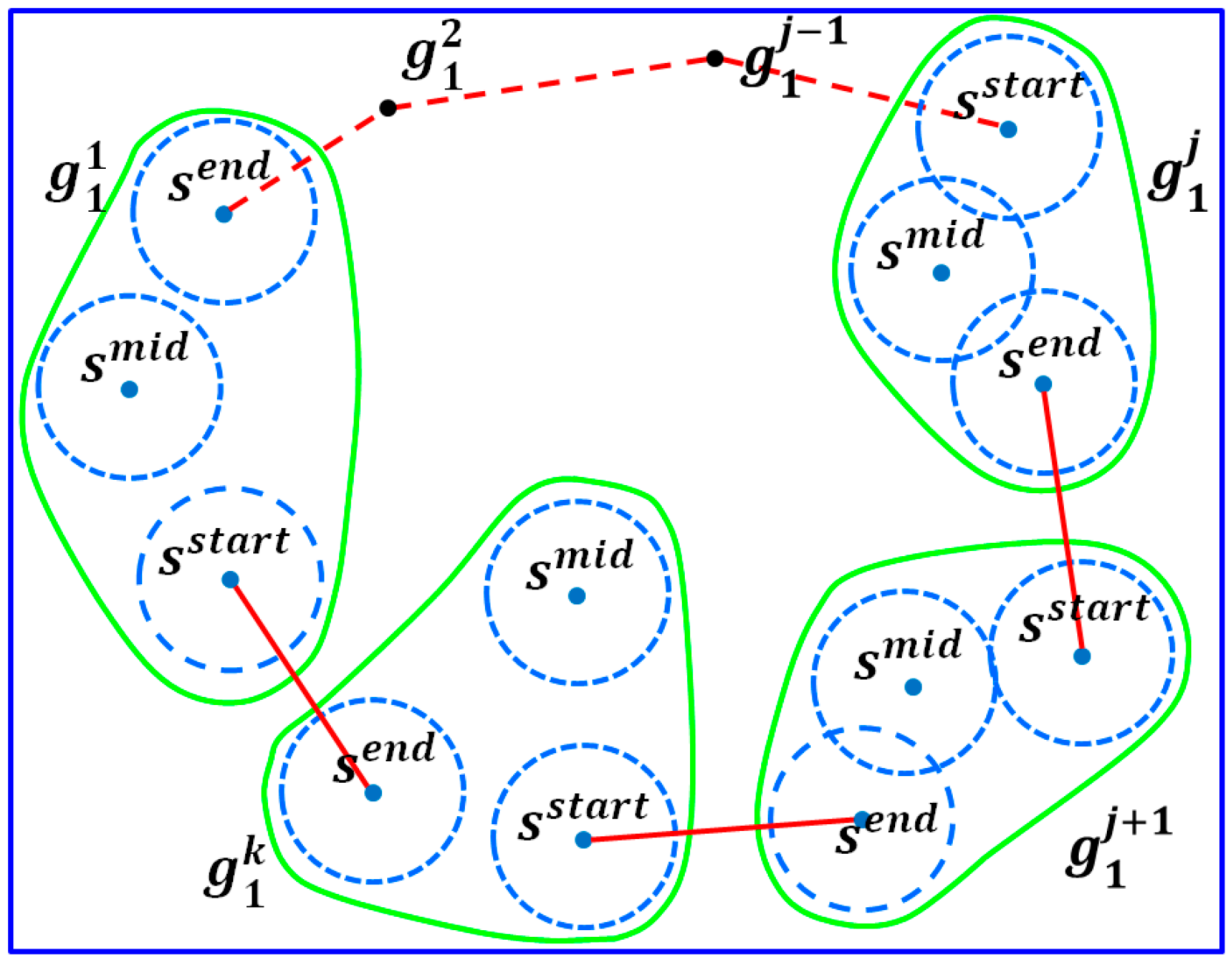
4.4. Inter-Group Path Reduction Phase
4.5. The Proposed RPC Algorithm
| Algorithm 1: Recharging Path Construction (RPC) Algorithm | ||
| Inputs: 1. A set of sensors . Notation denotes the location of sensor . The mobile recharger is labeled with . 2. The southeast point , horizontal line L passing through . | ||
| Output: The recharging path . | ||
| P H A S E I | /* Initial Recharging Path Construction (IRPC) Phase */ | |
| 1. | for(){ | |
| 2. | ||
| 3. | ||
| 4. | Turn L in an anticlockwise direction until L | |
| 5. | touches any point, say ; | |
| 6. | plays the role of ; | |
| 7. | goto 4; | |
| 8. | Connect each ;} | |
| 9. | Let convex polygon G=; | |
| 10. | if (){ | |
| 11. | ; | |
| 12. | for(){ | |
| 13. | compute according to Exp. (10) | |
| 14. | ;}} | |
| 15. | ; | |
| P H A S E II | /*Partitioning Phase*/ | |
| 16. | for(){ | |
| 17. | =(); | |
| 18. | Construct three partitions and }; | |
| P H A S E III | /*Inner-Group Path Reduction Phase*/ | |
| 19. | for(){ | |
| 20. | ; | |
| 21. | Construct ; | |
| 22. | Shift the segment toward ; | |
| 23. | ; | |
| P H A S E IV | /*Inter-Group Path Reduction Phase*/ | |
| 24. | for(){ | |
| 25. | for() | |
| 26. | Compute according to Exp. (19);} | |
| 27. | Compute , and by Exp. (20); | |
| 28. | ; | |
| 29. | Return ; | |
5. Performance Evaluation
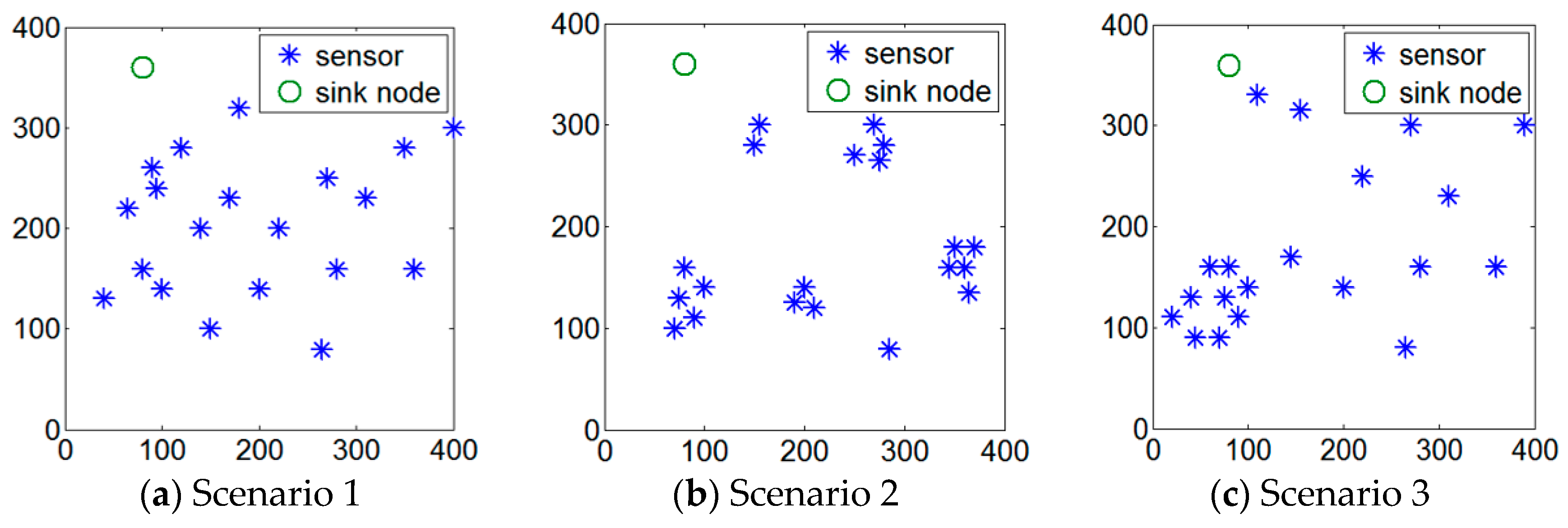
5.1. Simulation Environment
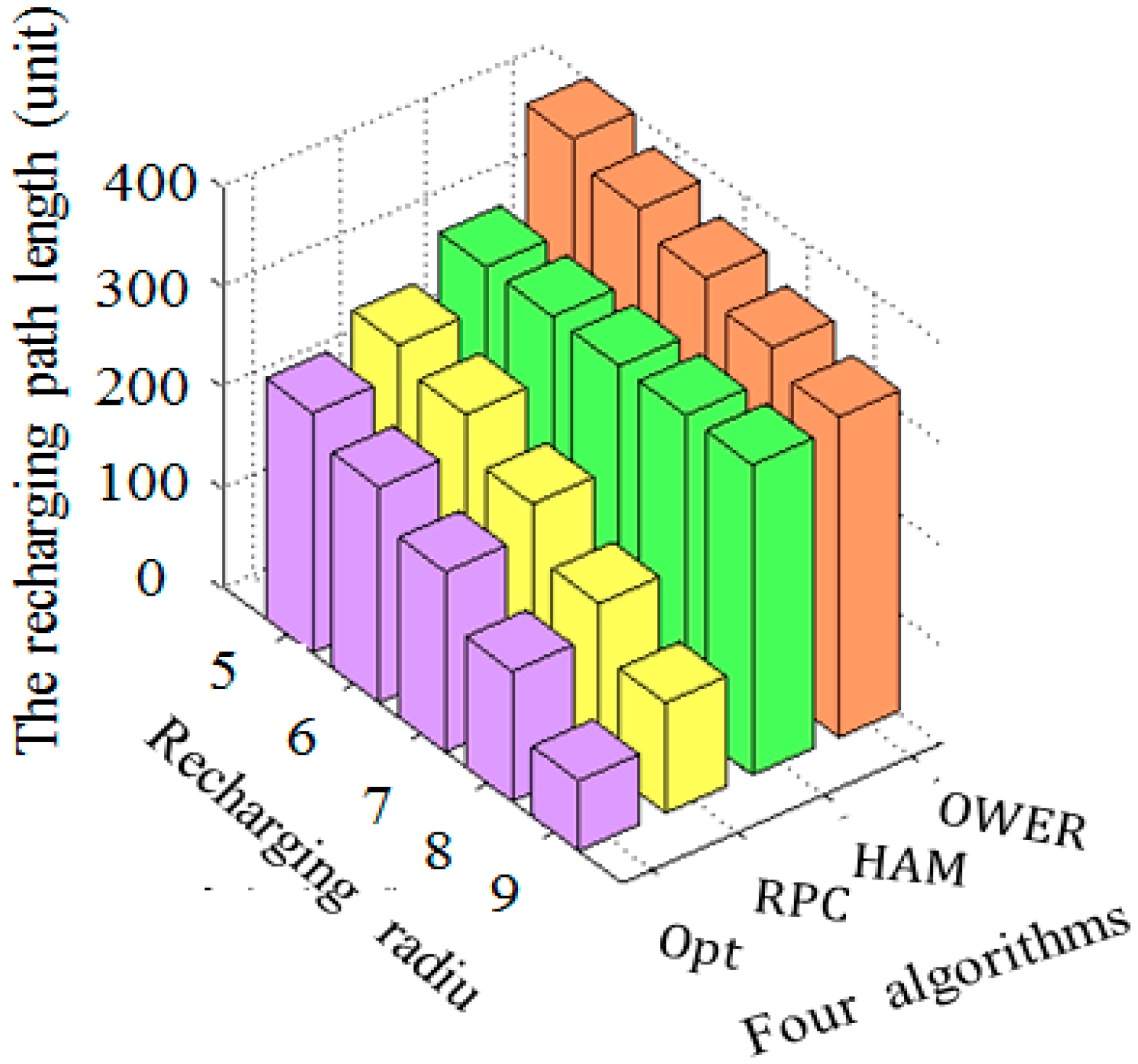
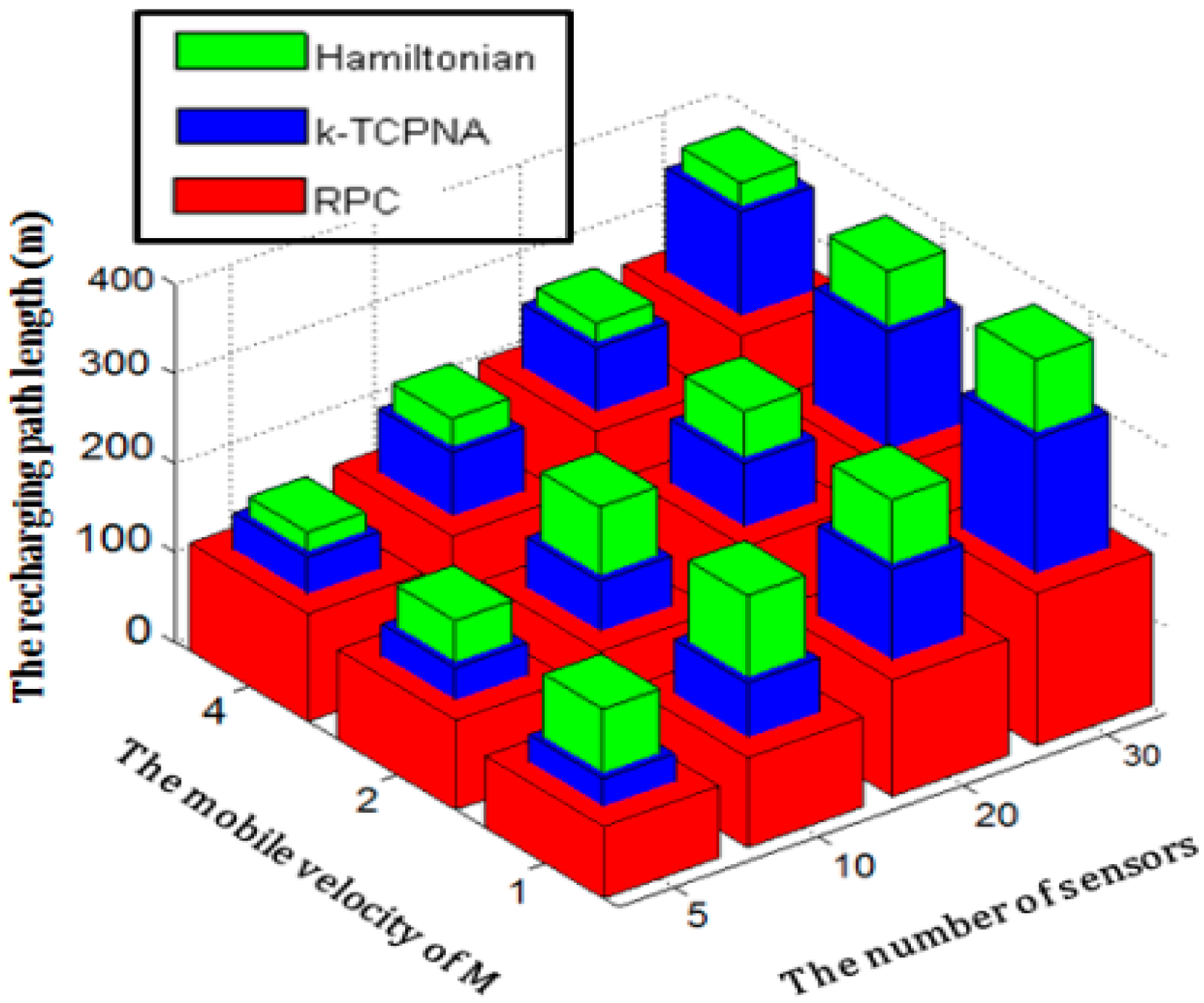
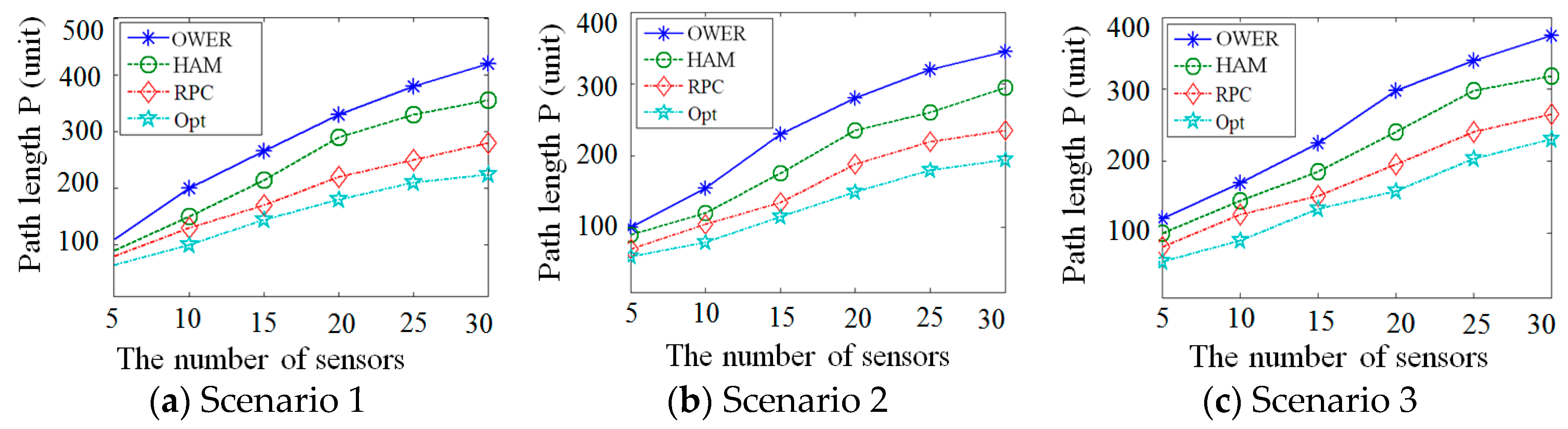
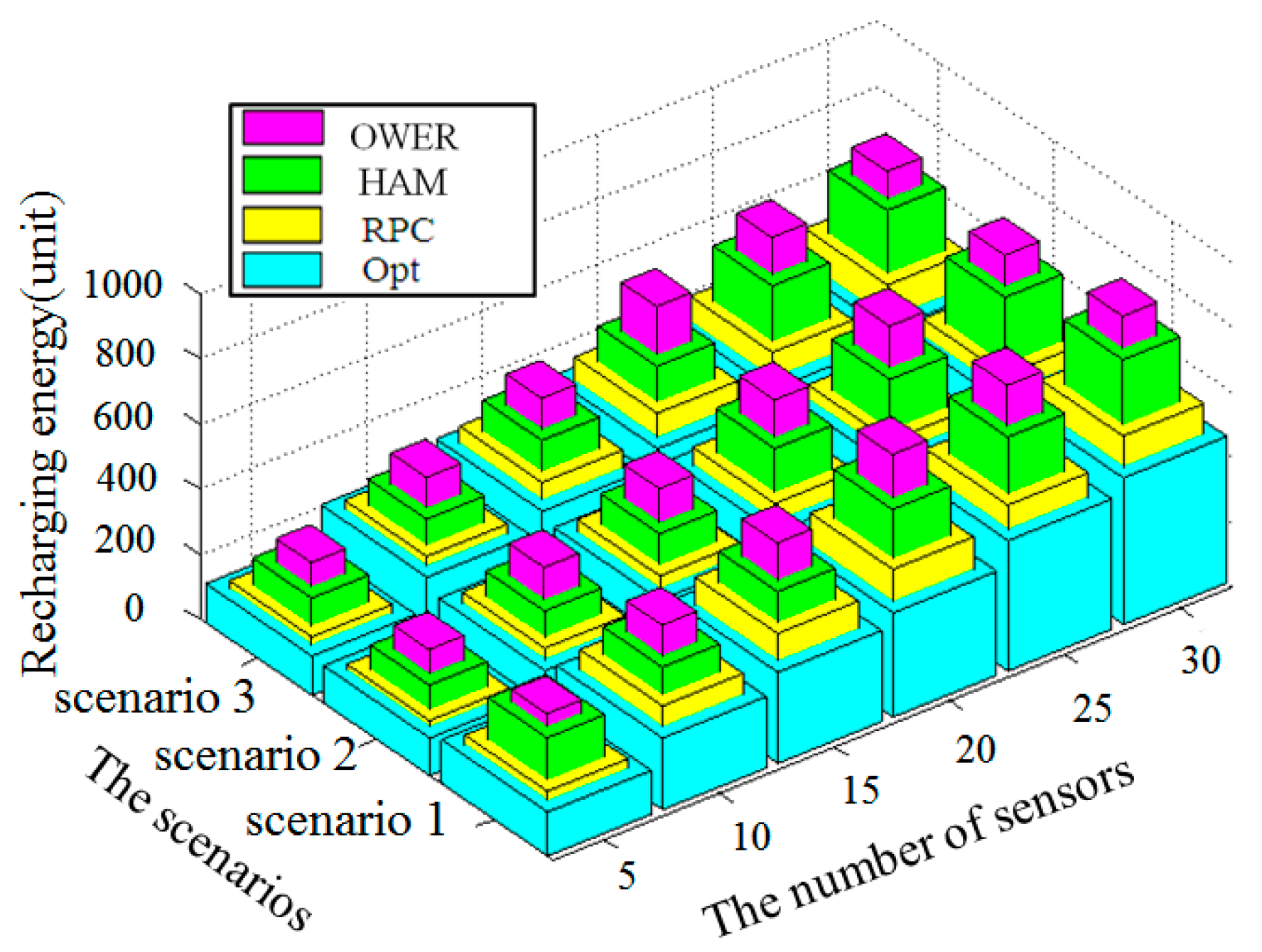
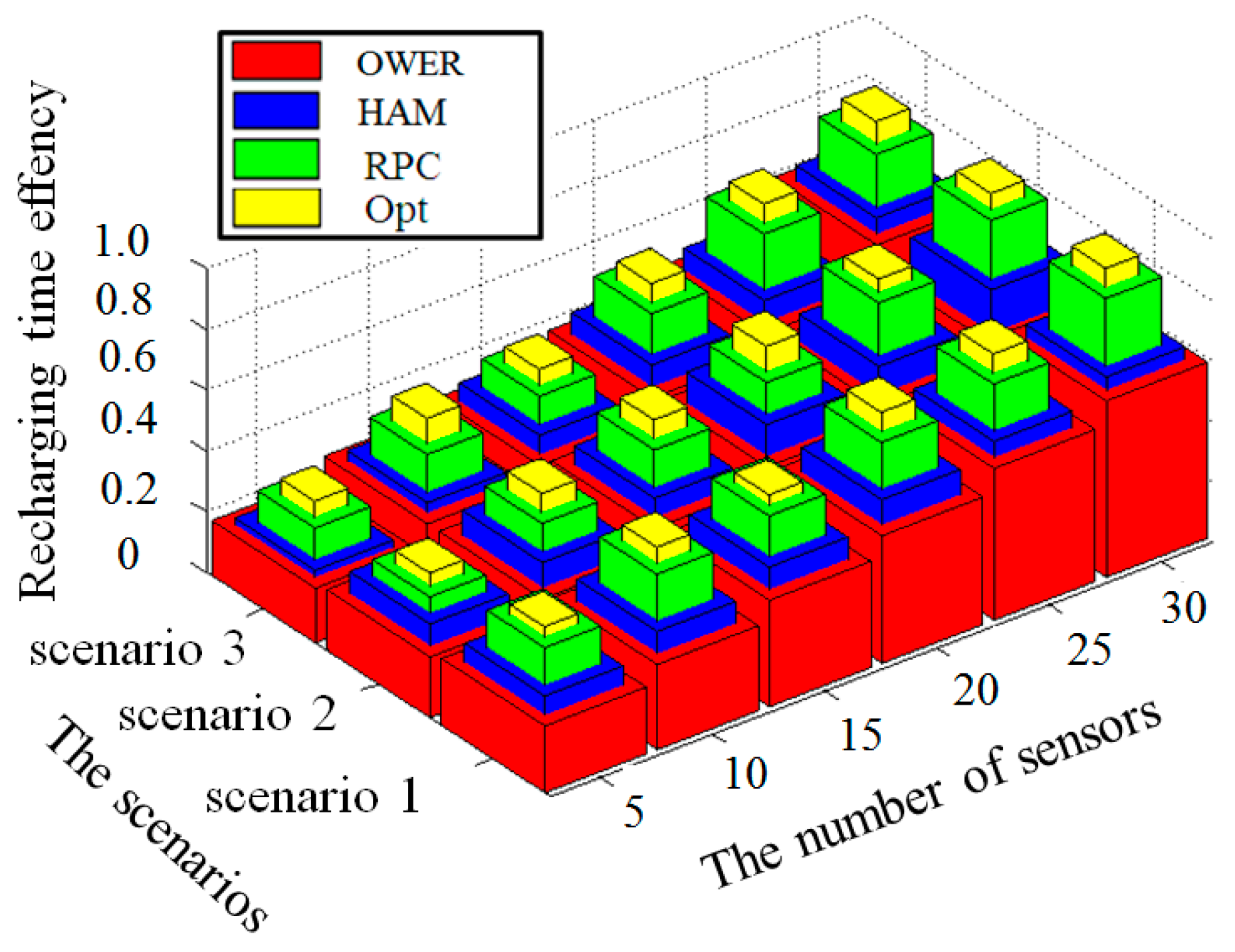
5.2. Performance Study
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Srbinovska, M.; Gavrovski, C.; Dimcev, V.; Krkoleva, A.; Borozan, V. Environmental Parameters Monitoring in Precision Agriculture Using Wireless Sensor Networks. J. Clean. Prod. 2015, 88, 297–307. [Google Scholar] [CrossRef]
- Bhuiyan, M.Z.A.; Wang, G.; Cao, J.; Wu, J. Deploying Wireless Sensor Networks with Fault Tolerance for Structural Health Monitoring. IEEE Trans. Comput. 2015, 64, 382–395. [Google Scholar] [CrossRef]
- Ehsan, S.; Bradford, K.; Brugger, M. Design and Analysis of Delay-Tolerant Sensor Networks for Monitoring and Tracking Free-Roaming Animals. IEEE Trans. Wirel. Commun. 2012, 11, 1220–1227. [Google Scholar] [CrossRef]
- Vaidya, T.; Swami, P.; Rindhe, S.; Kulkarni, S.; Patil, S. Avalanche Monitoring & Early Alert System Using Wireless Sensor Network. Int. J. Adv. Res. Comput. Sci. Electron. Eng. 2013, 2, 38–41. [Google Scholar]
- Keung, G.Y.; Li, B.; Zhang, Q. The Intrusion Detection in Mobile Sensor Network. IEEE/ACM Trans. Netw. 2012, 20, 1152–1161. [Google Scholar] [CrossRef]
- Abo-Zahhad, M.; Ahmed, S.M.; Sabor, N.; Sasaki, S. Mobile Sink-Based Adaptive Immune Energy-Efficient Clustering Protocol for Improving the Lifetime and Stability Period of Wireless Sensor Networks. IEEE Sens. J. 2015, 15, 4576–4586. [Google Scholar] [CrossRef]
- Le, T.N.; Pegatoquet, A.; Berder, O.; Sentieys, O. Energy-Efficient Power Manager and MAC Protocol for Multi-Hop Wireless Sensor Networks Powered by Periodic Energy Harvesting Sources. IEEE Sens. J. 2015, 15, 7208–7220. [Google Scholar] [CrossRef]
- Kiani, F.; Amiri, E.; Zamani, M.; Khodadadi, T.; Abdul Manaf, A. Efficient Intelligent Energy Routing Protocol in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 2015, 1–13. [Google Scholar] [CrossRef]
- Steinfeld, L.; Ritt, M.; Silveira, F.; Carro, L. Optimum Design of a Banked Memory with Power Management for Wireless Sensor Networks. Springer Wirel. Netw. 2015, 21, 81–94. [Google Scholar] [CrossRef]
- Taneja, J.; Jeong, J.; Culler, D. Design, Modeling, and Capacity Planning for Micro-Solar Power Sensor Networks. In Proceedings of the 2008 International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2008.
- Tan, Y.K.; Panda, S.K. Self-Autonomous Wireless Sensor Nodes with Wind Energy Harvesting for Remote Sensing of Wind-Driven Wildfire Spread. IEEE Trans. Instrum. Meas. 2011, 60, 1367–1377. [Google Scholar] [CrossRef]
- Sodano, H.A.; Simmers, G.E.; Dereux, R.; Inman, D.J. Recharging Batteries Using Energy Harvested from Thermal Gradients. J. Intell. Mater. Syst. Struct. 2007, 18, 3–10. [Google Scholar] [CrossRef]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K. Y.; Xing, G.; Sun, Y. Energy Provisioning in Wireless Rechargeable Sensor Networks. IEEE Trans. Mob. Comput. 2013, 12, 1931–1942. [Google Scholar] [CrossRef]
- Lu, S.; Wu, J.; Zhang, S. Collaborative Mobile Charging for Sensor Networks. In Proceedings of the 2012 International Conference on Mobile Ad-Hoc and Sensor Systems (MASS), Las Vegas, NV, USA, 8–11 October 2012.
- Peng, Y.; Li, Z.; Zhang, W.; Qiao, D. Prolonging Sensor Network Lifetime Through Wireless Charging. In Proceedings of the 31st IEEE Real-Time Systems Symposium (RTSS), San Diego, CA, USA, 30 November–3 December 2010.
- Xie, L.; Shi, Y.; Hou, Y.T.; Sherali, H.D. Making Sensor Networks Immortal: An Energy-Renewal Approach with Wireless Power Transfer. IEEE/ACM Trans. Netw. 2012, 20, 1748–1761. [Google Scholar] [CrossRef]
- De Lurgio, P.; Djurcic, Z. A Prototype of Wireless Power and Data Acquisition System for Large Detectors. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrom. Detect. Assoc. Equip. 2015, 785, 99–104. [Google Scholar] [CrossRef]
- Shi, Y.; Xie, L.; Hou, Y.T.; Sherali, H.D. On Renewable Sensor Networks with Wireless Energy Transfer. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM), Shanghai, China, 10–15 April 2011.
- Li, J.; Zhao, M.; Yang, Y. OWER-MDG: A Novel Energy Replenishment and Data Gathering Mechanism in Wireless Rechargeable Sensor Networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012.
- Ganeriwal, S.; Kansal, A.; Srivastava, M.B. Self-Aware Actuation for Fault Repair in Sensor Networks. In Proceedings of IEEE International Conference on Robotics and Automation (ICRA), New Orleans, LA, USA, 26 April–1 May 2004.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging Stability | Recharging While Moving | Without Passing Center of Sensor | Periodic Recharging | |
|---|---|---|---|---|
| Solar system [10] | × | × | × | × |
| WEH system [11] | × | × | × | × |
| Thermal system [12] | × | × | × | × |
| WISP [13] | ○ | × | × | × |
| CMC [14] | ○ | × | × | ○ |
| DIWC system [15] | ○ | × | × | ○ |
| Mobile system [16] | ○ | × | × | ○ |
| The proposed RPC | ○ | ○ | ○ | ○ |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Chen, G.; Zhao, S.; Chang, C.-Y.; Chin, Y.-T. An Efficient Wireless Recharging Mechanism for Achieving Perpetual Lifetime of Wireless Sensor Networks. Sensors 2017, 17, 13. https://doi.org/10.3390/s17010013
Yu H, Chen G, Zhao S, Chang C-Y, Chin Y-T. An Efficient Wireless Recharging Mechanism for Achieving Perpetual Lifetime of Wireless Sensor Networks. Sensors. 2017; 17(1):13. https://doi.org/10.3390/s17010013
Chicago/Turabian StyleYu, Hongli, Guilin Chen, Shenghui Zhao, Chih-Yung Chang, and Yu-Ting Chin. 2017. "An Efficient Wireless Recharging Mechanism for Achieving Perpetual Lifetime of Wireless Sensor Networks" Sensors 17, no. 1: 13. https://doi.org/10.3390/s17010013
APA StyleYu, H., Chen, G., Zhao, S., Chang, C.-Y., & Chin, Y.-T. (2017). An Efficient Wireless Recharging Mechanism for Achieving Perpetual Lifetime of Wireless Sensor Networks. Sensors, 17(1), 13. https://doi.org/10.3390/s17010013