1. Introduction
It is well-known that Stokes equations describe low Reynolds number flow motion and play a fundamental role in the numerical modeling of incompressible viscous flows. Recently, there has been an increasing interest in solving Stokes problems by various meshfree (or meshless) methods [
1,
2,
3,
4,
5] to alleviate mesh-related dilemmas, including some collocation meshless methods, such as virtual interpolation point method [
6], generalized finite difference method [
7], divergence-free kernel approximation method [
8], as well as some Galerkin meshless methods, such as the moving least square reproducing kernel method [
9], weighted extended B-spline method [
10], Galerkin boundary node method [
11], and the divergence-free meshless local Petrov–Galerkin method [
12].
The element-free Galerkin (EFG) method [
13] is a Galerkin-based meshfree discretization technique for solving partial differential equations. The trial and test functions for the EFG method are generated by the moving least squares (MLS) approximation [
14]. During the past several decades, many research works have been devoted to improving and extending the MLS approximation, see [
4,
15,
16,
17,
18] for various details. To offset the lack of interpolating properties of the MLS shape functions, several interpolation-type MLS methods have been developed. We refer to [
14,
18,
19,
20,
21] and the references therein for details.
In addition to choosing the interpolation-type MLS methods, some mandatory methods, such as the Lagrange multiplier method [
3,
4,
13], Nitsche method [
22,
23] and penalty method [
3,
4,
24,
25,
26,
27,
28] are desirable in practical applications. The important feature of these methods is that they can straightforwardly use the non-interpolating trial and test functions by modifying the traditional weak form. The penalty method seems to be more appealing because of its ease of implementation, its variable-preservation and its general framework, and these significant advantages enable numerical analysis.
In the context of the EFG method, many papers are devoted to penalty-based error analysis for elliptic problems [
24,
25], parabolic problems [
26,
28] and contact problems [
27]. To the authors’ knowledge, for Stokes problems, a priori errors of the meshless penalty method have not been explained, and numerical analysis with a penalty factor has not been presented either. The main difficulty may be that the modified weak form based on the penalty method is different from the standard weak form, thus the standard meshless Galerkin procedure cannot be used directly.
In order to better clarify the principle of the penalty method and determine an efficient penalty factor, the presented paper is an extension of the previous works [
25,
28] on the EFG method for Stokes problems. The modified weak form of penalized Stokes problems is analyzed. Based on a discrete inf-sup condition, error bounds with a penalty factor of the EFG discretization are given in
norm for velocity approximation and in
norm for pressure approximation, respectively. Furthermore, an error estimate with a penalty factor for velocity approximation in
norm is also derived. Numerical examples are given to confirm the theoretical results.
The remainder of the paper is organized as follows. In
Section 2, we introduce the Stokes problem and its standard weak formulation. Then, a priori estimates of the penalty method are determined on the Dirichlet boundary and in the problem domain in
Section 3, respectively.
Section 4 and
Section 5 present the modified weak form of the penalized Stokes problem and the EFG numerical discretization, respectively.
Section 6 is devoted to the error analysis for velocity and pressure approximations. Numerical examples are presented in
Section 7 and conclusions are drawn in the final Section.
Throughout this paper, the letter C, with a superscript or subscript, is used to represent a generic positive constant, independent of the characteristic distance h and could take different values at different appearances.
2. Stokes Problem
Consider the following 2D Stokes problem:
with the velocity
, the pressure
p, the body force
, and the viscosity
. Assume that the
is convex domain, a priori estimate holds [
29], i.e.,
Set
and
. The weak formulation of (
1) is to seek
such that
in which
and
Clearly, the bilinear form
is continuous and coercive on
,
is continuous on
and satisfies the inf-sup condition,
where
is a positive constant depending only on
. Therefore, the continuity and coercivity of
hold, namely
Then a unique weak solution
of (
3) follows from the Lax–Milgram theorem.
3. Penalized Stokes Problem
In the subsequent numerical discrete process, since the MLS shape functions with non-interpolating properties will be adopted, the penalty method is used to impose the Dirichlet boundary condition. In order to better illustrate the principle of the penalty method, by using a penalty factor
, (
1) is approximated as the following penalized problem:
where
is the unit outward normal to
. By combining (
1) and (
5), an a priori estimate of the penalty method on the boundary
is first derived.
Lemma 1. Assume that (5) satisfies the following regularity,Then, Proof. Combining the boundary condition of (
5) and the trace theorem [
30], we have:
which together with (
6) implies (
7). □
It is shown by Lemma 1 that when the penalty factor
approaches infinity, the solution
of (
5) tends to
with
norm on the Dirichlet boundary
. Clearly, the boundary term
is almost independent of the penalty factor on this point. In addition,
is equivalent to
, which can be regarded as the approximation of
. Then, the a priori estimate within the problem domain is exported.
Lemma 2. Assume that the domain Ω is convex and (5) has the regularity condition (6). Then, Proof. Subtracting (
1) from (
5) yields:
Multiplying both sides by
and integrating by parts over
, we have:
Since
, from the trace theorem [
30], we have:
Combining (
2) and Lemma 1 completes the proof. □
It can be found that when the penalty factor approaches infinity, the solution tends to with semi-norm in the problem domain by Lemma 2. Lemmas 1 and 2 fully demonstrate the validity of the penalty method in a continuous sense.
4. Modified Weak Form for Penalized Stokes Problem
We define:
where
Clearly, applying Friedrich’s inequality yields:
Lemma 3. Let and a further assumption on be:When the penalty factor , then: Proof. For any
, using assumption (
11), we have:
If
, one gets:
then,
which together with (
10) implies (
12). □
A discrete assumption similar to (
11) is used in the Nitsche method to ensure the continuity and coercivity of the bilinear form for the elliptic equation [
1]. In this paper, the assumption (
11) is proposed to certify the continuity of
and inf-sup condition, thus deriving that
is continuous and coercive.
The modified weak form of (
5) is to find
such that:
where
Clearly, using Lemma 3, the continuity of
follows:
The coercivity of
follows:
Similarly,
is continuous on
. Moreover,
also satisfies the inf-sup condition,
where
. Similar to
,
satisfies the continuity and coercivity conditions. Therefore, based on the Lax-Milgram theorem, (
5) has a unique weak solution
.
5. EFG for Penalized Stokes Problem
To approximate the solution of the modified weak form (
15), the approximate space of the velocity is defined as:
and the approximate space of the pressure is:
in which
is a set of
velocity nodes in
,
is a set of
pressure nodes.
and
represent the MLS shape functions based on velocity nodes and pressure nodes, respectively.
Now, we briefly state the MLS shape function and its approximation error by taking the velocity nodes as an example, which is similar to the pressure nodes. The MLS shape functions
are:
in which
denotes the shifted and scaled monomial basis function [
22,
24,
25,
28],
means the global sequence numbers of nodes whose support domains cover the point
. The support domain of
is
with radius
,
.
,
,
,
and
with weight function
.
Assume that the configuration of velocity nodes satisfies the following conditions:
- (B1)
Define the characteristic distance
h as
- (B2)
To ensure the invertibility of
,
where
represents the largest degree of the used monomial basis functions.
Moreover, assume that derivatives of the weight function up to order are bounded and continuous such that . Then, MLS shape functions are bounded and -times continuously differentiable, i.e., .
Lemma 4 ([
24])
. Assume that , conditions (B1) and (B2) are satisfied, denotes the MLS approximation of w. Then The following lemma is regarded as a sufficient condition for to satisfy the discrete inf-sup condition in the meshless method.
Lemma 5 ([
9,
10])
. Assume that satisfies the following condition, for any , where , the index set . Then satisfies the discrete inf-sup conditionwhere is independent of h. The EFG method for (
15) is to find
such that:
The EFG solutions and have an estimate similar to Lemma 1.
Lemma 6. Assume that (22) satisfies the following regularity:Then, Proof. Combining the definition of (
18) and the trace theorem [
30],
which together with (
23) implies (
24). □
6. Error Analysis
First of all, an error bound for velocity in the norm and an error bound for pressure in the norm are given separately.
Theorem 1. Let and be the solutions of (1) and (22), respectively. Assume that and Γ is sufficiently smooth, then: Proof. Subtracting (
15) from (
22) yields:
Choosing
in the first equation of the above formula yields:
Applying the continuity of
gets:
Since
and
, we have:
Again using
obtains:
Combining the discrete inf-sup condition (
21) and (
27), there exists a
such that:
Then,
where
Inserting (
29)–(
34) into (
28), considering
and Lemma 3 yields:
From Lemma 3 and the trace inequality, we have:
Therefore,
Using
together with (
32) and (
37) imply (
26).
Let
be the weak solution of:
and let
, then:
By the definition of
, the function
satisfies:
Combining Green’s formula and the fact
gives:
Inserting (
41)–(
43) into (
40) and choosing
yield
Hence
which together with (
37) and (
39) implies (
25). □
According to Lemmas 1 and 2, theoretically, the penalty method requires that the penalty factor
tends to infinity to impose the Dirichlet boundary condition. Nevertheless, in numerical calculations, the coefficient matrix of the resulting system will become ill-conditioned when the penalty factor increases uncontrollably. By deploying
in (
25) and (
26), the optimal convergence rates are derived as:
When the linear basis function is chosen in the MLS approximation, i.e.,
and the penalty factor
, the corresponding convergence rates are optimal as:
Clearly, in this case, the EFG solution converges to the exact solution with optimal convergence rate h in , but the pressure numerical solution only maintains first order convergence in .
To obtain the numerical error of velocity in norm, the following definition and lemma are required.
Definition 1 ([
25,
31])
. Let and . A system of functions called -regular functions and presented by if and only if, for any , there is a function such that:in which . If has a compact support , then ξ has a compact support such that:where denotes the distance from to . The following approximate error follows from the above definition.
Lemma 7 ([
25,
31])
. Let and on Γ. If Γ is sufficiently smooth, and , then there exists a function such that:in which , , and . Clearly, the MLS shape functions satisfy the requirements of in Definition 1. Therefore, with and . Now, with the aid of the duality argument, an error bound of in the norm can be derived.
Theorem 2. Let and be the solutions of (1) and (22), respectively. Assume that , Γ is sufficiently smooth and , then:where with , and with . Considering the case of is large enough, we obtain: Proof. Define the error
. For any
, we have:
Moreover, assume that the solution of (
48) satisfies:
Define the error
,
According to Lemma 7, choosing
, there exists
and
such that:
where
with
, and
with
. Since
, taking
in (
48) yields
Again, choosing
in (
50) provides:
In addition,
Inserting (
54) and (
55) into (
53) gets:
Furthermore, combining Lemma 6, (
51) and (
52) leads to:
Inserting (
57)–(
60) into (
56) yields:
which together with Theorem 1 implies (
46). As in Refs. [
25,
31], (
47) is obtained for
as sufficiently large. □
Substituting
into (
47), we have:
Therefore, as suggested by Theorem 1, for linear basis function, when
, the convergence rate is:
Furthermore, when
, we can obtain a suboptimal convergence rate as:
7. Numerical Examples
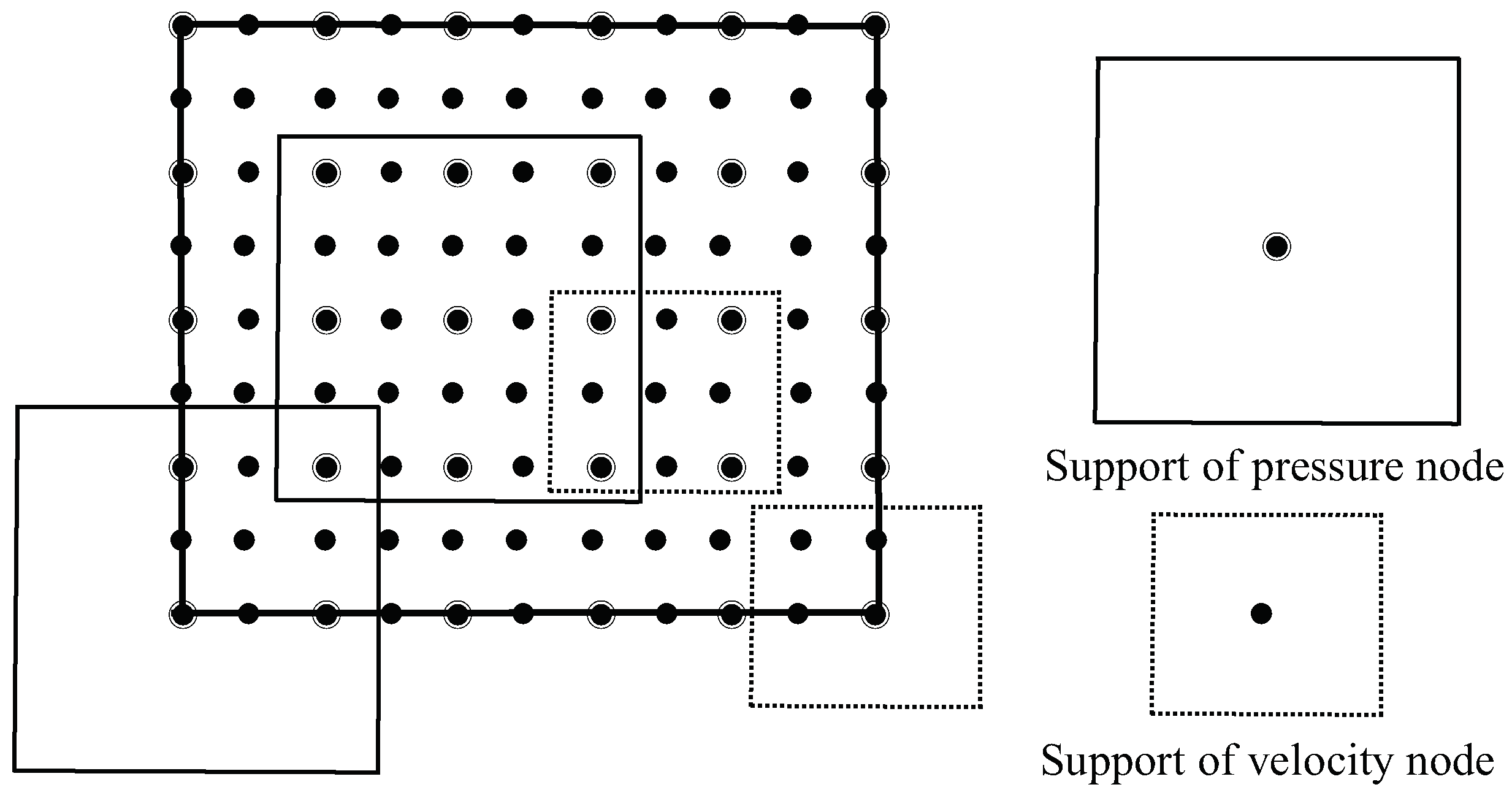
This section presents four numerical examples to illustrate the theoretical error results proposed in the previous section. The problem domain is the unit square
. An efficient discrete node configuration for velocity and pressure has been proposed to satisfy the condition of Lemma 5 [
9,
10], see
Figure 1.
7.1. Example 1
The first example is the Stokes problem (
1) with the viscosity
. The exact solution is:
Figure 2 depicts the log-log plots of the errors
and
with respect to increasing penalty factors
for linear basis function (
). The radius of support domain of the velocity node is
and four types of equidistant nodes
,
,
and
are used. Clearly, a too-small or too-big penalty factor increases the numerical errors and leads to the invalidation of numerical calculations. Theorems 1 and 2 imply that the theoretical errors of velocity are dominated by
for a small penalty factor. It can be observed that the numerical errors of velocity keep almost the same convergence order
from the left sides of
Figure 2a,b. Obviously, the numerical errors of velocity agree well with the theoretical error estimates.
The condition numbers of the discrete coefficient matrix for the increasing penalty factors are shown in
Figure 3. It is clear that the condition numbers increase with the increase of the penalty factor and the condition number is approximately
. Therefore, a too-big penalty factor predestinates invalidate the penalty method, which in turn leads to the failure of the numerical methods using the penalty method.
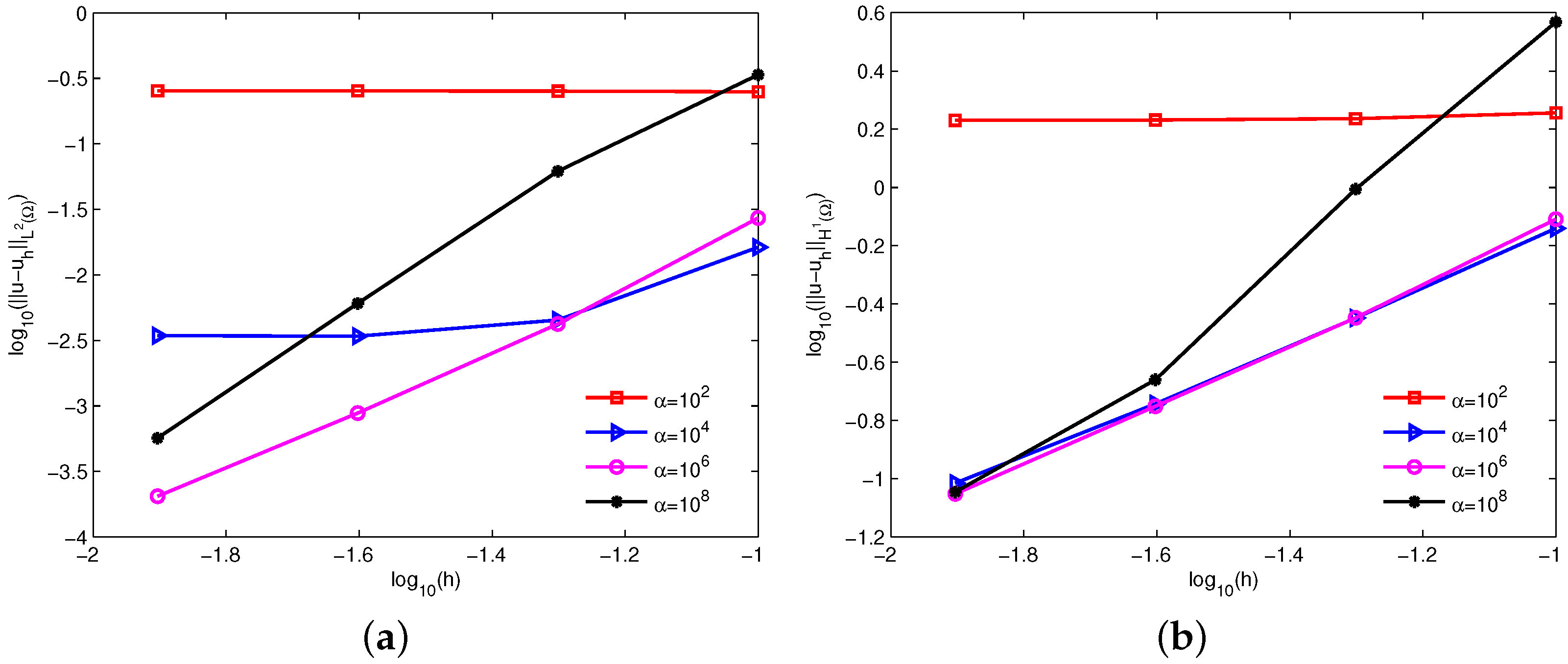
Figure 4 reveals the log-log plots of the errors
and
with respect to the nodal spacing
h for the constant penalty factors
. Clearly, as
h is halved, the errors hardly change for a too-small penalty factor and decrease for some large penalty factors. These numerical errors are in line with the theoretical analysis.
From the point of view of the numerical results above, a suitably large constant penalty factor can obtain stable numerical solutions. On the other hand, the latest theoretical analysis [
24,
25,
28] implies that the penalty factor affects the convergence order of the numerical solutions. According to Theorem 1, an option is
for linear basis function, where
is a constant related to the problem to be solved.
Figure 5 shows the log-log plots of the errors
and
with respect to the nodal spacing
h for different
. Clearly,
affects the accuracy of the numerical solutions, but hardly impacts the convergence order. By comparison, a great choice is
from a precision point of view, and the error bounds have been tabulated in
Table 1. It is clear that the numerical convergence orders are consistent with the theoretical analysis.
Moreover, it can be known from Theorem 2 that a valid choice is
for the
norm of velocity errors in terms of linear basis function.
Figure 6 displays the log-log plots of the errors
with respect to the nodal spacing
h for
and
. Similarly,
is an excellent option. Meanwhile, the numerical errors of
and
have been shown in
Table 2. Visibly, the numerical convergence order of velocity is 1/3 order higher than the theoretical result in terms of
norm, but the numerical errors of
still accord with the theoretical analysis.
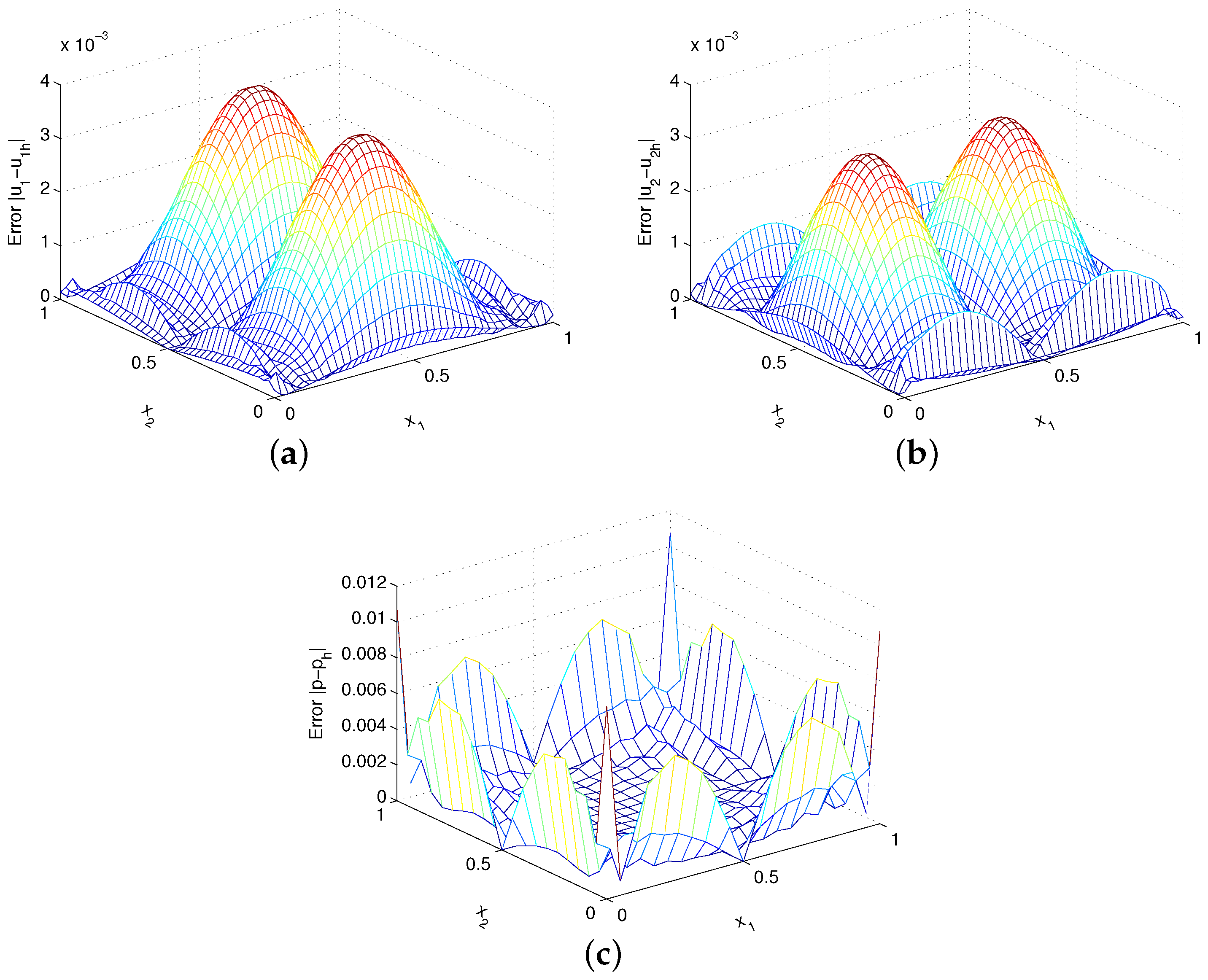
7.2. Example 2
The second example considers Stokes problem (
1) with
. The exact solutions are
Figure 7 shows the absolute errors
,
and
with
. The uniform
velocity nodes are distributed and a linear basis is adopted in these numerical solutions. Evidently, the method developed in this paper obtains very accurate numerical results. The numerical errors have been tabulated in
Table 3 and the results of
have also been contained. Clearly, the optimal numerical convergence rate of velocity can reach the second order in
norm for
, which is 1/3 order higher than the theoretical suboptimal convergence result. However, the numerical convergence orders for both velocity and pressure are consistent with the theoretical analysis for
.
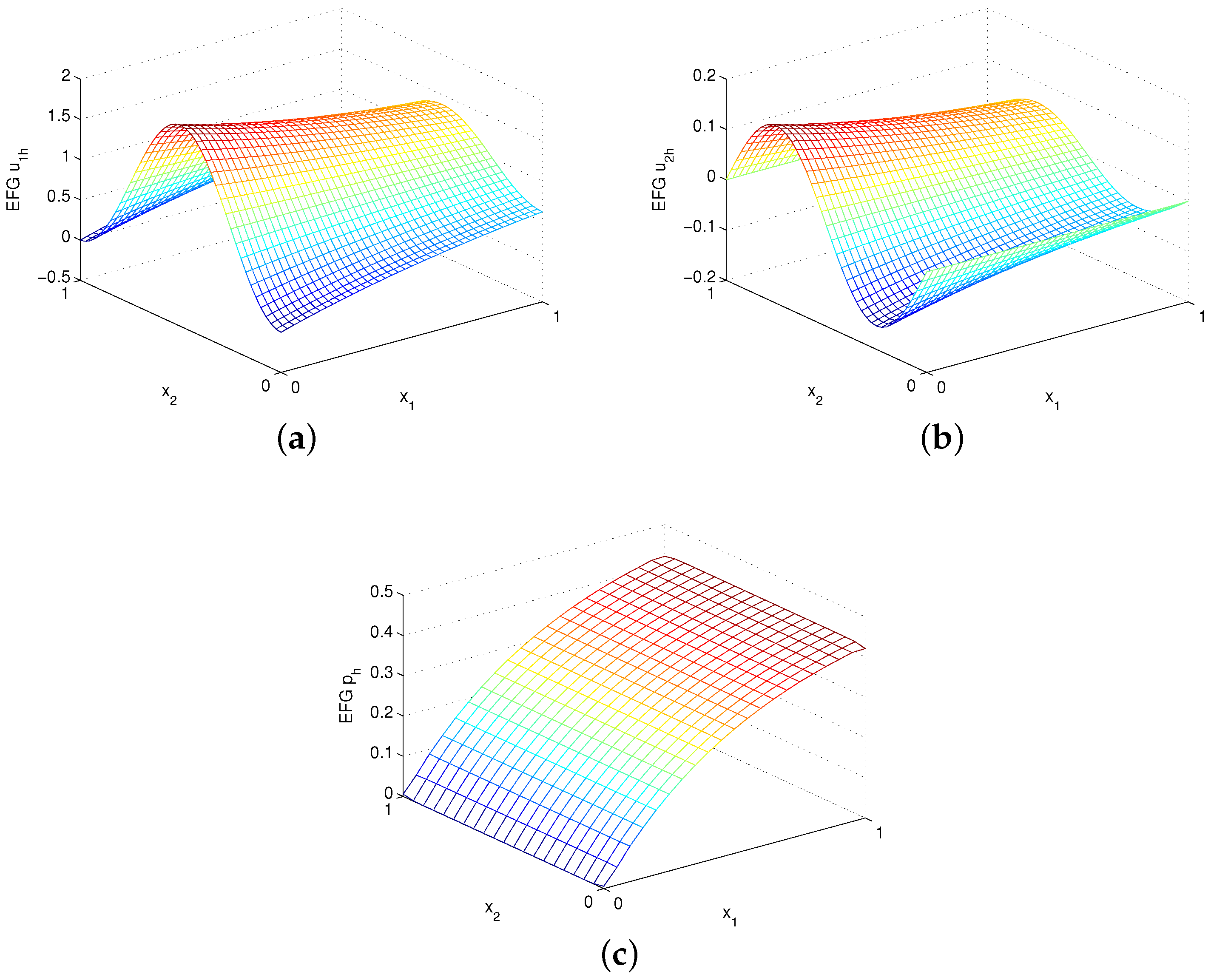
7.3. Example 3
The third example considers Kovasznay flow [
6]. The exact solutions are:
where
and
. The EFG numerical solutions
,
and
are shown in
Figure 8 for
and
Figure 9 for
using uniform
velocity nodes and
. Again, the EFG method gains very accurate numerical solutions.
Table 4 and
Table 5 give the errors for
and
, respectively. Obviously, except that the numerical convergence order of velocity of
is second order in
norm, the numerical convergence orders are still in good agreement with the theoretical analysis for
.
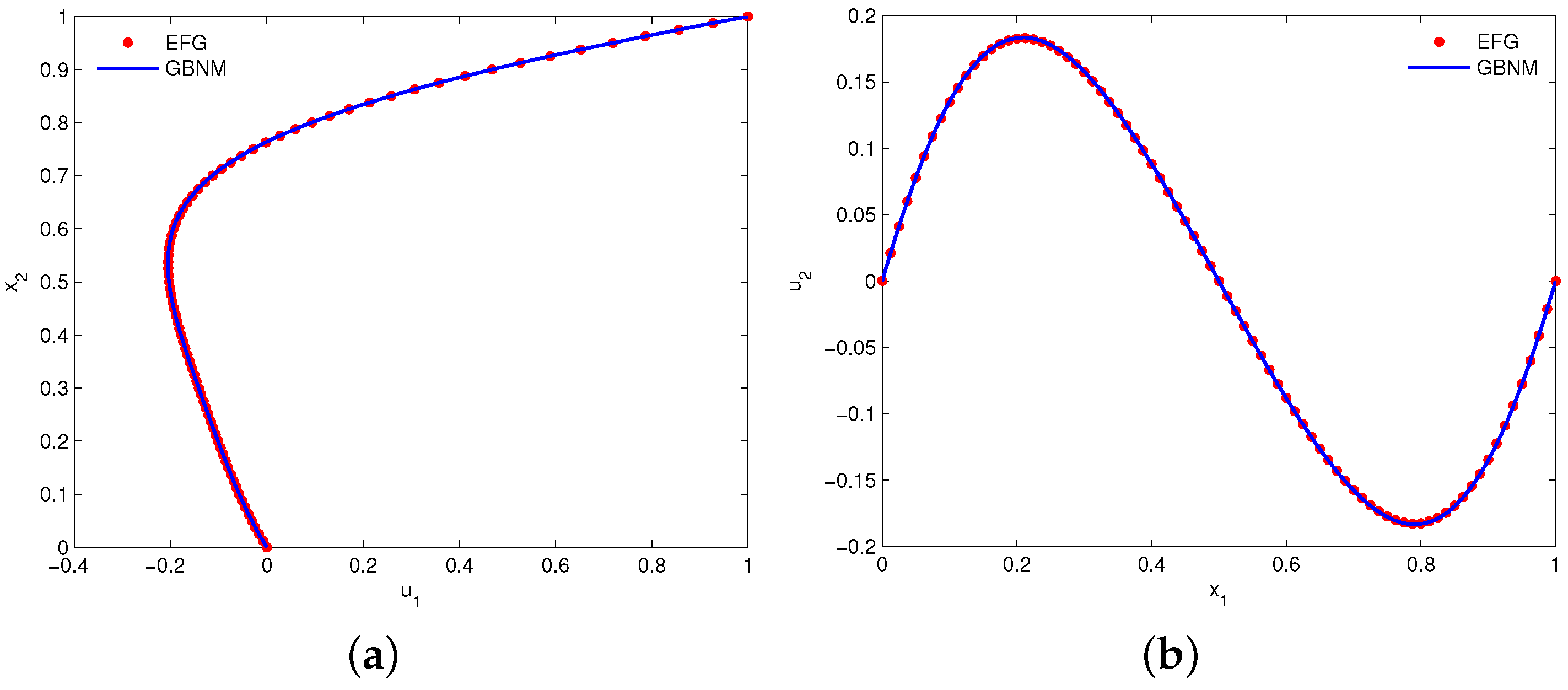
7.4. Example 4
The last example considers the lid-driven cavity flow problem, which is often regarded as a typical benchmark for incompressible flows. The body force
.
Figure 10 shows boundary conditions. On the top side
is given, and other sides are no-slip.
Figure 11 shows the EFG solutions of velocities
and
along the vertical centerline
and horizontal centerline
, respectively. The numerical results are derived by using uniform
velocity nodes and
. Meanwhile, the results of the Galerkin boundary node method (GBNM) [
11] are also plotted in this figure for comparison. Clearly, the EFG solutions are in good agreement with the GBNM results. Moreover,
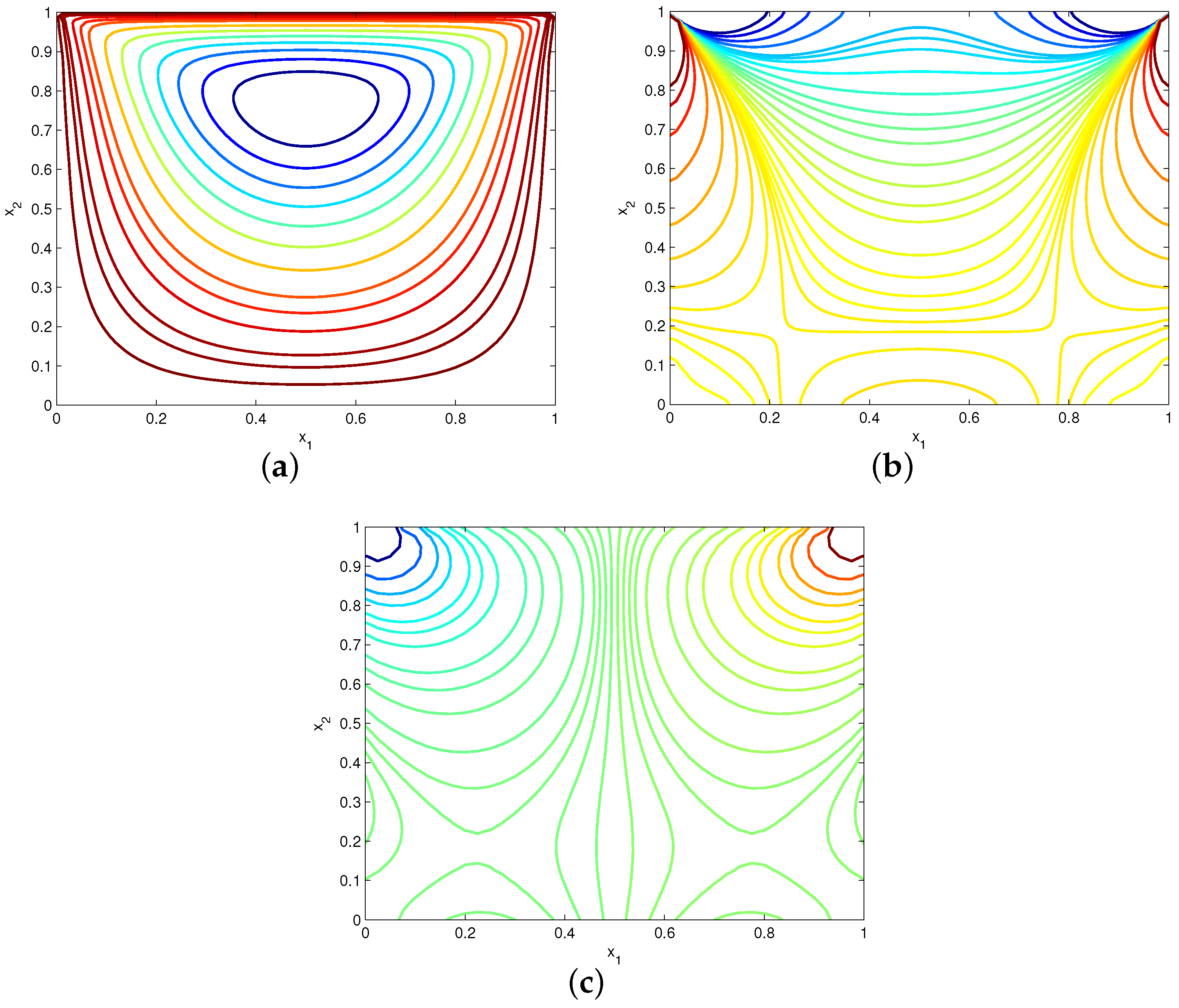
Figure 12 displays the computed plots of streamline, vorticity contour and pressure contour. It can be found that stable numerical results of velocity and pressure are achieved.
8. Conclusions
In this paper, we presented and analyzed a penalty-based EFG method for Stokes problems. The penalty method allows the use of the MLS approximation to generate trial and test functions in the modified weak form. A priori errors of the penalty method are determined on the Dirichlet boundary and in the problem domain respectively, which state the feasibility of the penalty method in a continuous sense. For the penalized Stokes problems, the existence and uniqueness of the weak solution are proved under a rational assumption, which provides a valid foundation for the EFG numerical discretization. Under the condition of discrete inf-sup, error estimates with a penalty factor are provided in and norms for velocity approximation and in norm for pressure approximation.
Numerical results reveal that the proposed method exhibits good numerical accuracy and agrees well with the theoretical prediction. Note that for linear basis functions, the numerical convergence order of velocity can reach the second order in norm, but we have only theoretically obtained a suboptimal convergence order of velocity. Therefore, more research is required on the theoretical analysis of the present method for deriving the optimal convergence order of velocity in norm. In addition, how to reduce the condition numbers is an important research topic.
Author Contributions
Conceptualization, T.Z.; Formal analysis, T.Z.; Funding acquisition, X.L.; Investigation, T.Z.; Methodology, T.Z.; Software, T.Z.; Supervision, X.L.; Writing—original draft, T.Z.; Writing—review & editing, X.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (Grant No. 11971085), the Natural Science Foundation of Chongqing (Grant Nos. cstc2021jcyj-jqX0011, cstc2020jcyj-msxm0777, cstc2021ycjh-bgzxm0065) and an open project of Key Laboratory for Optimization and Control Ministry of Education, Chongqing Normal University (Grant No. CSSXKFKTM202006).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Babuška, I.; Banerjee, U.; Osborn, J.E. Survey of meshless and generalized finite element methods: A unified approach. Acta Numer. 2003, 12, 1–125. [Google Scholar] [CrossRef] [Green Version]
- Li, S.H.; Liu, W.K. Meshfree Particle Methods; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Liu, G.R. Meshfree Methods: Moving beyond the Finite Element Method, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Cheng, Y.M. Meshless Methods; Science Press: Beijing, China, 2015. [Google Scholar]
- Sun, T.; Li, J.W.; Zhao, J.P.; Feng, X.L. Least-squares RBF-FD method for the incompressible Stokes equations with the singular source. Numer. Heat Transf. Part A Appl. 2019, 75, 739–752. [Google Scholar] [CrossRef]
- Park, S.K.; Jo, G.; Choe, H.J. Existence and stability in the virtual interpolation point method for the Stokes equations. J. Comput. Phys. 2016, 307, 535–549. [Google Scholar] [CrossRef]
- Song, L.N.; Li, P.W.; Gu, Y.; Fan, C.M. Generalized finite difference method for solving stationary 2D and 3D Stokes equations with a mixed boundary condition. Comput. Math. Appl. 2020, 80, 1726–1743. [Google Scholar] [CrossRef]
- Li, J.W.; Gao, Z.M.; Dai, Z.H.; Feng, X.L. Divergence-free radial kernel for surface Stokes equations based on the surface helmholtz decomposition. Comput. Phys. Commun. 2020, 256, 107408. [Google Scholar] [CrossRef]
- Choe, H.J.; Kim, D.W.; Kim, H.H.; Kim, Y. Meshless method for the stationary incompressible Navier-Stokes equations. Discret. Contin. Dyn. Syst. B. 2001, 1, 495–526. [Google Scholar]
- Kumar, V.V.K.S.; Kumar, B.V.R.; Das, P.C. Weighted extended B-spline method for the approximation of the stationary Stokes problem. J. Comput. Appl. Math. 2006, 186, 335–348. [Google Scholar] [CrossRef] [Green Version]
- Li, X.L.; Zhu, J.L. A meshless Galerkin method for Stokes problems using boundary integral equations. Comput. Methods Appl. Mech. Eng. 2009, 198, 2874–2885. [Google Scholar] [CrossRef]
- Najafi, M.; Dehghan, M.; Šarler, B.; Kosec, G.; Mavrič, B. Divergence-free meshless local Petrov-Galerkin method for Stokes flow. Eng. Comput. 2022; in press. [Google Scholar] [CrossRef]
- Belytschko, T.; Lu, Y.Y.; Gu, L. Element-free Galerkin methods. Int. J. Numer. Methods Eng. 1994, 37, 229–256. [Google Scholar] [CrossRef]
- Lancaster, P.; Salkauskas, K. Surfaces generated by moving least squares methods. Math. Comput. 1981, 37, 141–158. [Google Scholar] [CrossRef]
- Cheng, H.; Peng, M.J.; Cheng, Y.M. The dimension splitting and improved complex variable element-free Galerkin method for 3-dimensional transient heat conduction problems. Int. J. Numer. Methods Eng. 2018, 114, 321–345. [Google Scholar] [CrossRef]
- Wan, J.S.; Li, X.L. Analysis of a superconvergent recursive moving least squares approximation. Appl. Math. Lett. 2022, 133, 108223. [Google Scholar] [CrossRef]
- Li, X.L. Theoretical analysis of the reproducing kernel gradient smoothing integration technique in Galerkin meshless methods. J. Comput. Math. 2022; in press. [Google Scholar]
- Yu, S.Y.; Peng, M.J.; Cheng, H.; Cheng, Y.M. The improved element-free Galerkin method for three-dimensional elastoplasticity problems. Eng. Anal. Bound. Elem. 2019, 104, 215–224. [Google Scholar] [CrossRef]
- Zheng, Z.Y.; Li, X.L. Theoretical analysis of the generalized finite difference method. Comput. Math. Appl. 2022, 120, 1–14. [Google Scholar] [CrossRef]
- Wang, J.F.; Sun, F.X.; Cheng, Y.M. An improved interpolating element-free Galerkin method with a nonsingular weight function for two-dimensional potential problems. Chin. Phys. B 2012, 21, 090204. [Google Scholar] [CrossRef]
- Sun, F.X.; Wang, J.F.; Cheng, Y.M.; Huang, A.X. Error estimates for the interpolating moving least-squares method in n-dimensional space. Appl. Numer. Math. 2015, 98, 79–105. [Google Scholar] [CrossRef]
- Li, X.L.; Li, S.L. A fast element-free Galerkin method for the fractional diffusion-wave equation. Appl. Math. Lett. 2021, 112, 106724. [Google Scholar] [CrossRef]
- Wu, J.C.; Wang, D.D. An accuracy analysis of Galerkin meshfree methods accounting for numerical integration. Comput. Methods Appl. Mech. Eng. 2021, 375, 113631. [Google Scholar] [CrossRef]
- Li, X.L.; Li, S.L. On the stability of the moving least squares approximation and the element-free Galerkin method. Comput. Math. Appl. 2016, 72, 1515–1531. [Google Scholar] [CrossRef]
- Zhang, T.; Li, X.L. Analysis of the element-free Galerkin method with penalty for general second-order elliptic problems. Appl. Math. Comput. 2020, 380, 125306. [Google Scholar] [CrossRef]
- Zhang, J.P.; Shen, Y.; Hu, H.Y.; Gong, S.G.; Wu, S.Y.; Wang, Z.Q.; Huang, J. Transient heat transfer analysis of orthotropic materials considering phase change process based on element-free Galerkin method. Int. Commun. Heat Mass. 2021, 125, 105295. [Google Scholar] [CrossRef]
- Ding, R.; Shen, Q.; Yao, Y. The element-free Galerkin method for the dynamic Signorini contact problems with friction in elastic materials. Appl. Math. Comput. 2022, 415, 126696. [Google Scholar] [CrossRef]
- Zhang, T.; Li, X.L.; Xu, L.W. Error analysis of an implicit Galerkin meshfree scheme for general second-order parabolic problems. Appl. Numer. Math. 2022, 177, 58–78. [Google Scholar] [CrossRef]
- Li, J.; Chen, Z.X. A new local stabilized nonconforming finite element method for the Stokes equations. Computing 2008, 82, 157–170. [Google Scholar] [CrossRef]
- Evans, L.C. Partial Differential Equations; American Mathematical Society: Providence, RI, USA, 2010. [Google Scholar]
- Babuška, I. The finite element method with penalty. Math. Comput. 1973, 27, 221–228. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Configuration for velocity and pressure nodes.
Figure 1.
Configuration for velocity and pressure nodes.
Figure 2.
Influence of the increasing penalty factors on errors (a) and (b) for example 1.
Figure 2.
Influence of the increasing penalty factors on errors (a) and (b) for example 1.
Figure 3.
Condition numbers of the discrete coefficient matrix for the increasing penalty factors for example 1.
Figure 3.
Condition numbers of the discrete coefficient matrix for the increasing penalty factors for example 1.
Figure 4.
Influence of the constant penalty factors on errors (a) and (b) for example 1.
Figure 4.
Influence of the constant penalty factors on errors (a) and (b) for example 1.
Figure 5.
Errors of (a) and (b) for different constant for example 1.
Figure 5.
Errors of (a) and (b) for different constant for example 1.
Figure 6.
Errors of based on (a) and (b) for example 1.
Figure 6.
Errors of based on (a) and (b) for example 1.
Figure 7.
Plots of (a) errors , (b) errors and (c) errors for example 2.
Figure 7.
Plots of (a) errors , (b) errors and (c) errors for example 2.
Figure 8.
Plots of (a) EFG , (b) EFG and (c) EFG with for example 3.
Figure 8.
Plots of (a) EFG , (b) EFG and (c) EFG with for example 3.
Figure 9.
Plots of (a) EFG , (b) EFG and (c) EFG with for example 3.
Figure 9.
Plots of (a) EFG , (b) EFG and (c) EFG with for example 3.
Figure 10.
Schematic diagram of example 4.
Figure 10.
Schematic diagram of example 4.
Figure 11.
Plots of (a) along the vertical centerline and (b) along the horizontal centerline for example 4.
Figure 11.
Plots of (a) along the vertical centerline and (b) along the horizontal centerline for example 4.
Figure 12.
Plots of (a) streamline, (b) vorticity contour and (c) pressure contour for example 4.
Figure 12.
Plots of (a) streamline, (b) vorticity contour and (c) pressure contour for example 4.
Table 1.
Errors and convergence orders using for example 1.
Table 1.
Errors and convergence orders using for example 1.
| h | | Order | | Order |
|---|
| 1/10 | | | | |
| 1/20 | | 1.03 | | 1.27 |
| 1/40 | | 1.00 | | 1.05 |
| 1/80 | | 1.00 | | 0.96 |
Table 2.
Errors and convergence orders of velocity for example 1.
Table 2.
Errors and convergence orders of velocity for example 1.
| h | | |
|---|
| Order | | Order |
|---|
| 1/10 | | | | |
| 1/20 | | 2.12 | | 2.21 |
| 1/40 | | 1.75 | | 2.09 |
| 1/80 | | 1.30 | | 2.05 |
| 1/160 | | 1.05 | | 2.03 |
Table 3.
Errors and convergence orders for example 2.
Table 3.
Errors and convergence orders for example 2.
| h | | | |
|---|
| Order | | Order | | Order | | Order |
|---|
| 1/10 | | | | | 1.1118 | | | |
| 1/20 | | 1.51 | | 2.03 | | 0.97 | | 0.94 |
| 1/40 | | 1.07 | | 2.03 | | 0.99 | | 0.87 |
| 1/80 | | 0.96 | | 2.02 | | 0.99 | | 0.87 |
Table 4.
Errors and convergence orders with for example 3.
Table 4.
Errors and convergence orders with for example 3.
| h | | | |
|---|
| Order | | Order | | Order | | Order |
|---|
| 1/10 | | | | | | | | |
| 1/20 | | 2.04 | | 2.34 | | 1.00 | | 1.97 |
| 1/40 | | 1.51 | | 2.36 | | 0.99 | | 1.65 |
| 1/80 | | 1.01 | | 2.26 | | 0.97 | | 1.24 |
Table 5.
Errors and convergence orders with for example 3.
Table 5.
Errors and convergence orders with for example 3.
| h | | | |
|---|
| Order | | Order | | Order | | Order |
|---|
| 1/10 | | | | | | | | |
| 1/20 | | 1.87 | | 2.32 | | 0.99 | | 1.83 |
| 1/40 | | 1.31 | | 2.34 | | 0.99 | | 1.39 |
| 1/80 | | 1.03 | | 2.23 | | 0.99 | | 1.06 |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}