1. Introduction
In 2002, Bandt and Pompe introduced so-called permutation entropy [
1]. This entropy has been established in non-linear dynamical system theory and time series analysis, including applications in many fields from biomedicine to econophysics (compare with Zanin et al. [
2]). It is a crucial point that permutation entropy is theoretically justified by asymptotic results relating it to Kolmogorov–Sinai entropy (KS entropy, also called metric entropy) which is the central complexity measure for dynamical systems. The important relationship of permutation entropy and KS entropy was first observed and mathematically founded for piece-wise monotone dynamical systems by Bandt et al. [
3].
The (empirical) concept of permutation entropy is based upon analyzing the distribution of ordinal patterns in a time series or the underlying system. In this paper, we concentrate on a measure-preserving dynamical system , i.e., a probability space equipped with a measurable map satisfying for all .
Given a random variable
, in this paper, an
ordinal pattern of length with respect to
X is considered as a subset of the state space
. It is indicated by a permutation
of
and defined by
(Usually, ordinal patterns are defined in the range of
X, i.e., for the vectors
). The collection of ordinal patterns:
is a partition of
.
In the rest of this section, we assume that
X preserves enough information about the given system in a certain sense. This is particularly the case if
is contained in
and
X is the identity map. A precise general description of the assumption is given when presenting the results of this paper. It was shown in [
4] that, under not too restrictive further conditions, the probability distribution on the partitions
for
can be used for determining the KS entropy of the given system. The reason is that, roughly speaking, under these conditions,
is able to separate the orbits of the system if
.
In order to address the problem that this paper is concerned with, we give a description of ordinal patterns being slightly different from the above. One can determine to which ordinal pattern
of length
n a point
belongs to if, for all
in:
one knows whether
holds true or not. In other words, there exists a set
such that:
where:
The above set contains all the points
that satisfy
for
and
for
. Note that, given some arbitrary
, the set on the right hand side of (3) can be empty. In the case that it is non-empty, it coincides with some ordinal pattern
of length
n.
While Equation (
3) might be a bit more abstract than (
1), it shows a way to generalize the concept of ordinal patterns on the basis of replacing the set
R in (
4) by some arbitrary Borel subset
R of
, also to investigate why ordinal patterns are so successful.
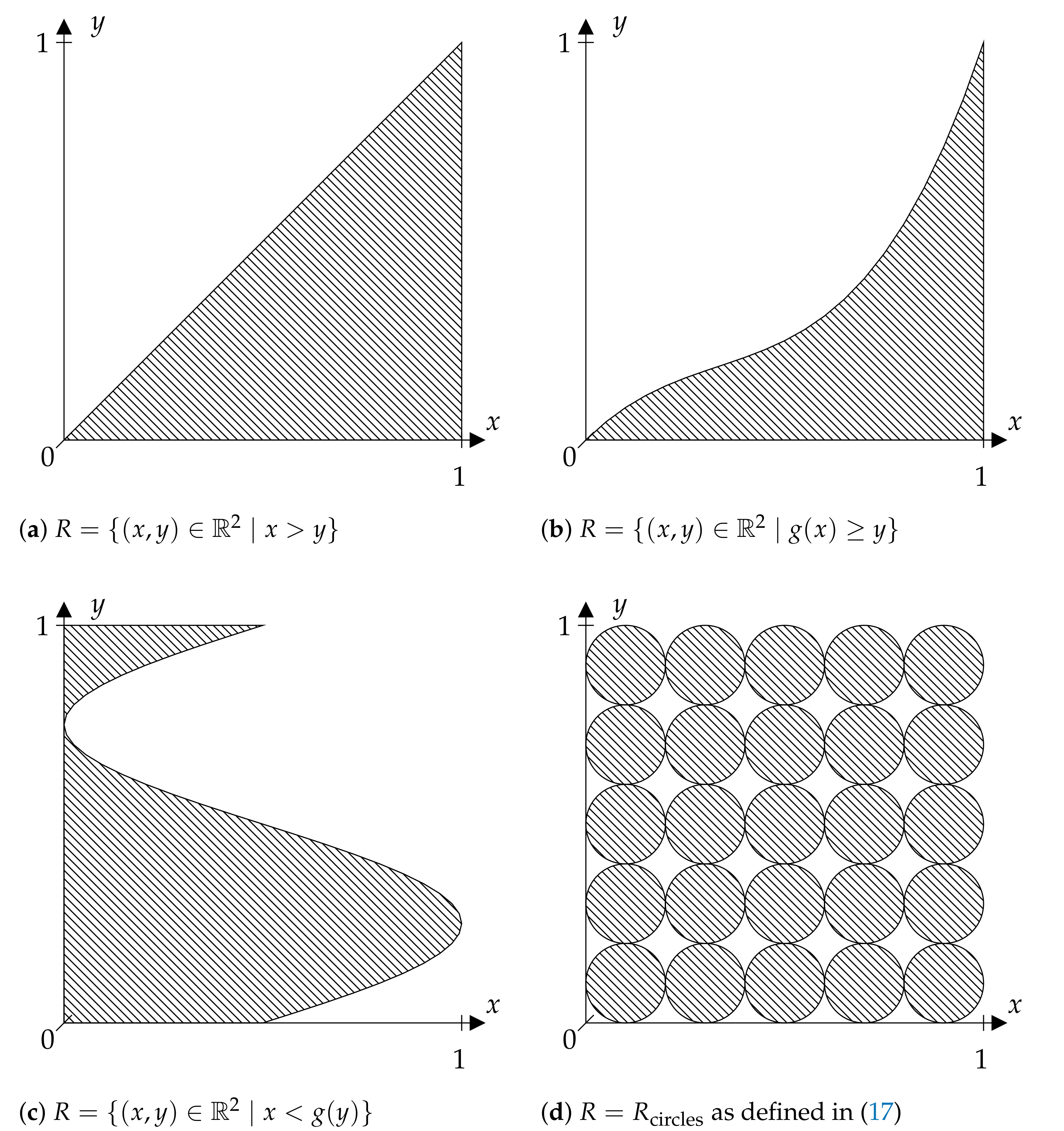
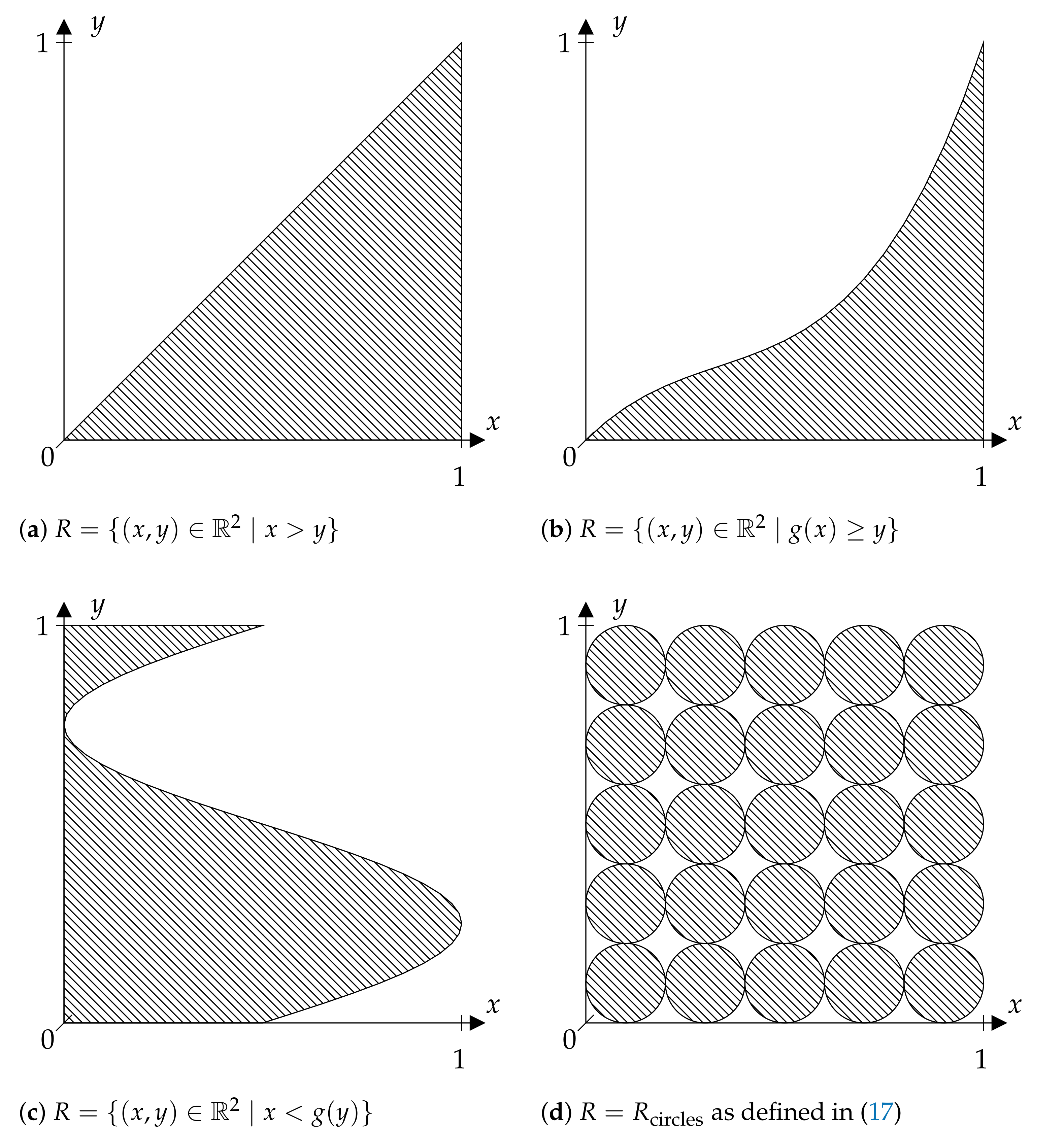
Definition 1. We call a non-empty Borel subset R of discriminating relation.
The figures given in this paper show different discriminating relations
R. In each case, only the part of
R contained in
is presented. Note that in the case that
X maps
into
, the restriction of
R itself to this part would not change anything.
Figure 1a illustrates
R as given in (
4), again only on
. In the case of such an
R, note that
mapping
into
would not make a difference to a given
X for our considerations, since order relations and associated partitions are preserved.
Given some discriminating relation,
generalized ordinal patterns of length n with respect to
X are given as the non-empty sets defined by the right hand side of (
3) for some
. Obviously, they also form a partition of
. The question that arises is what a discriminating relation
R should look like, such that those generalized ordinal patterns inhibit the same nice properties the original ordinal patterns had. More precisely, we ask the following question:
Main Question.
Under what conditions on a discriminating relation R the partitions given by the generalized ordinal patterns determine the KS entropy of a dynamical system?
Why is this determination of entropy, which is precisely described by formula (
10) in Theorem 1 interesting? For answering this question, interpret
X as an observable,
as the initial state of the given system and
as the measured values at times
. Determining (generalized) ordinal patterns on the basis of those values is a symbolization, where a symbol obtained is the (generalized) ordinal pattern containing
. Generally, symbolization means a coarse-graining of the state space underlying a system, where each point is assigned one of finitely many given symbols. Instead of considering the precise development of the system, one is interested in the change of symbols in the course of time, justifying the naming of the method symbolic dynamics. Note that a symbolization is equivalent to partitioning the state space into classes of states (with the same symbol).
The reason for obtaining the full entropy from the (generalized) ordinal patterns is, roughly speaking, that the symbol system obtained has high potential for separating orbits. Such kinds of successful symbolizations are important, for example, in big data analysis, see, e.g., Smith et al. [
5].
The above question was first considered in [
6], where the authors basically showed that sets of the form:
lead to generalized ordinal patterns that, under some conditions, can be used to determine the entropy if
is measurable and one-to-one. Such an
R is shown in
Figure 1b and will be discussed in
Section 4 as well as another
R illustrated in
Figure 1.
In this paper, we consider general sets
that cannot necessarily be described by functions and inequalities and establish some conditions under which the entropy can be determined using those sets. As in [
6], the discussion also includes a generalization of the sets
given by (
2) and is conducted in a multidimensional framework. In particular, the results give insights as to why the basic ordinal approach and generalizations are working.
It is instructive to discuss the partition of
into
R and
from the viewpoint of symbolic dynamics. In contrast to classical symbolization approaches with symbolizing only in the range of single “measurements”
x, the symbolization of pairs
via the partition
also regards some kind of link between
x and
y if
R lies “diagonal” in a certain sense. We will discuss this constellation, which explains the success of ordinal patterns in a wider context, more precisely in
Section 5.
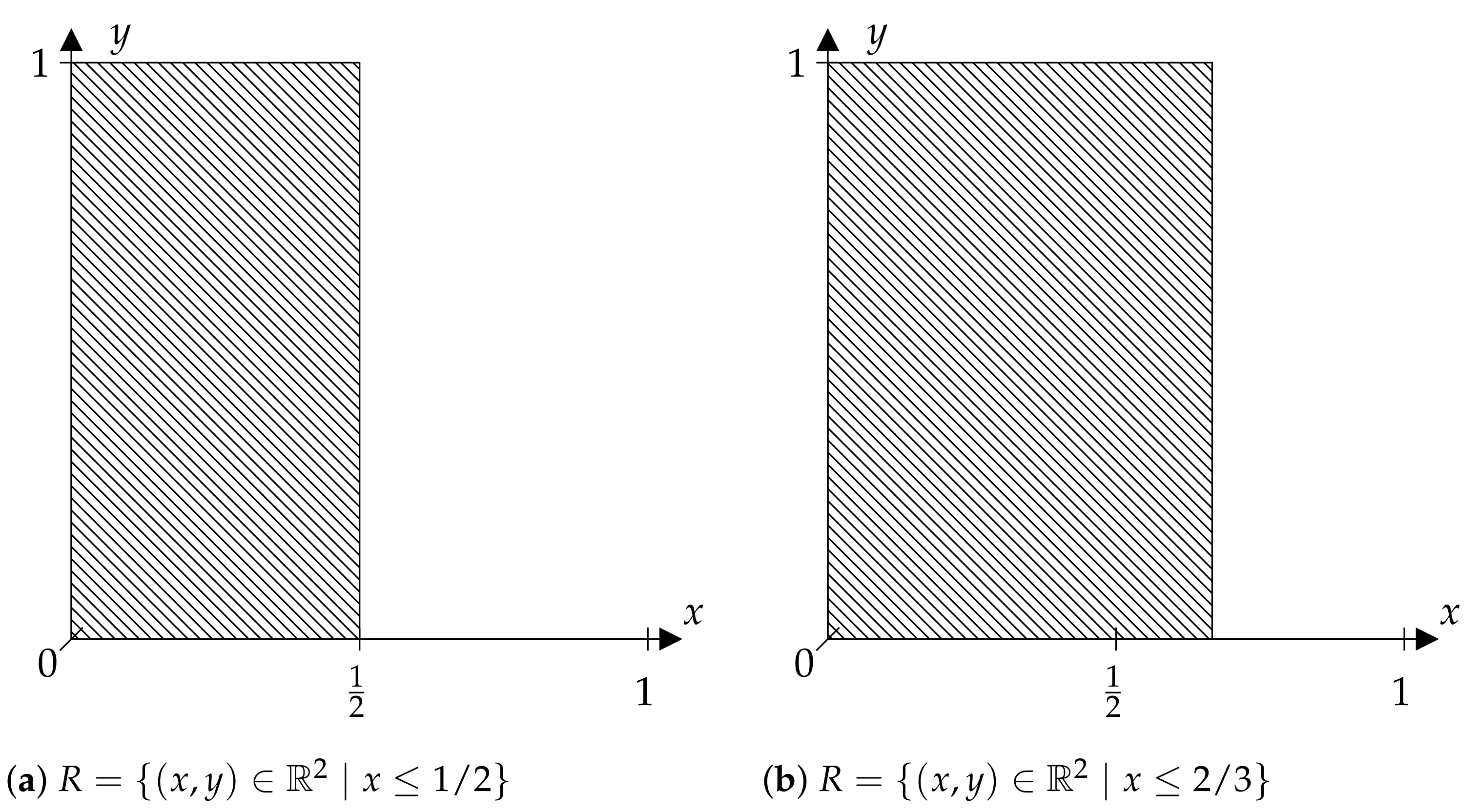
A completely different constellation is given for the sets
R shown in
Figure 2. Here,
R is obtained as a half-plane from a “horizontal” division of
. If, for example,
,
is the Borel
-algebra and
the Lebesgue measure on
, and if
T is the tent map on
, meaning that:
and
X is the identity map, then the location of the horizontal cut is substantial.
On the one hand,
(
Figure 2b) does not discriminate enough to obtain the KS entropy of the given system, and on the other hand, there is enough discrimination by
(
Figure 2a) due to the fact that
is a generating partition for
T. In the situation considered, there is no additional information given by the measurements
relative to measurement
x, hence
R provides nothing more than a classical symbolization. For a detailed discussion of these facts, see [
6].
The rest of this paper is organized as follows.
Section 2 provides the notions and concepts being necessary for formulating the main statement of this paper in
Section 3. This statement is rather abstract and general and has to be considered in relation to some special cases discussed in
Section 4 and making our ideas and findings transparent.
Section 5 is devoted to the proof of our main statement.
3. The Main Statement
Recall that a measure-preserving dynamical system is ergodic if for each with it holds , meaning that the system does not divide into proper parts.
Referring to
Section 1, we give some preparation for stating our main result. Recall that for defining (generalized) ordinal patterns it was basic to know whether
or
for
and a random variable
X on
, where “time” pairs
were taken from the sets
(see (
2)). In order to also allow reducing the number of necessary “comparisons”, we relax the definition of the sets
leading to the following concept.
Definition 2. We call a sequence with timing
, if contains finitely many elements and if there exists a sequence with: Formula (
7) roughly says that nearly each “temporal” distance is available for “comparisons”. It guarantees that enough time-pairs are considered to not have any loss of information contained in the “thinned out” generalized ordinal patterns relative to the “full” generalized ordinal patterns.
Remark 1. In the first paper on generalized ordinal patterns ([6]), a timing was differently defined: the authors of that paper called a sequence of finite sets timing, if there exists an increasing sequence such that for all : - (i)
,
- (ii)
for all , there exists a with and ,
- (iii)
for all
hold true. Note that the last condition does not only depend on the timing but also on T and . Instead of those three conditions, we instead simply require that almost all differences can be found in the timing.
Given a random vector
and
, we define the partition:
for all
, which is equal to:
Then, for
as given in (
2) the partition
is no more than the partition of generalized ordinal patterns with respect to
defined in
Section 1 and
can be considered as the partition of generalized ordinal patterns with respect to
.
The proof of the following main theorem of the paper is given in
Section 5.
Theorem 1. Let be an ergodic measure-preserving dynamical system, be a random vector, be a discriminating relation and be a timing. Assume that the following conditions are valid:Then:holds true. At first glance, conditions (
8) and (
9), being sufficient for (
10), are looking very special. The considerations in the following section will, however, elucidate their role and show that they are relatively general. Roughly speaking, (
8) says that the distribution of pairs of “independent measurements” with respect to
is discrete on the boundary of
R. Condition (
9) is an orbit separation condition based on the involved “measurements” and the functions
. In general:
holds true because all functions involved in (
9) are
measurable. Therefore, (
9) is equivalent to
The inclusion of the random variable
Y provides some further separation and allows the above inclusion to hold true for a wider class of dynamical systems than, for example, the ones considered in [
6]. In the case that
Y is constant, it can also be omitted. In theory,
Y should be chosen to take different values on those sets on which
takes the same values for
and
. In practice, the fact that such a random variable
Y exists is sufficient and
Y does not need to be explicitly specified. An example is given in
Section 4.5.
4. Special Cases
In the following, we discuss some special situations where the assumptions of Theorem 1, i.e., (
8) and (
9), are satisfied. Lemma 2 provides an easy-to-check condition, that of when (
8) holds true. It is more difficult to see, when the condition (
9) is satisfied. Roughly speaking, this condition is fulfilled if
together with
Y can uniquely describe the outcomes of the whole dynamical system and applying
to the results of
is, in some sense, “reversible” for all
. In other words,
together with
Y preserve the information of the system and there is no information loss for the symbolization. The first means that:
which obviously follows from
To describe the range of outcomes of the random variables
X on a probability space
, we will use its cumulative distribution functions
defined by
When applying the cumulative distribution functions
to the outcomes
X of a system, we do not lose any essential information about the system, according to the following lemma. This lemma is a simple modification of Lemma A.3 in [
6].
Lemma 1. Let be a probability space, be a random variable and be a measurable function which maps Borel sets to Borel sets and satisfies the following property:Then, . In particular, if or g is injective on . Condition (
11) in the above Lemma is a slightly weaker condition on
g than injectivity. If
g is injective, then
will hold true for all
and condition (
11) will be satisfied. More general, condition (
11) can still be true if
g is not necessarily injective but if all sets on which
g is not injective, which are given by
for all
, have measure 0. For example, this is true if
g is equal to the cumulative distribution function.
4.1. On the Boundary of R
The condition (
8) in Theorem 1, that the boundary of
R apart from countably many points has measure 0, holds true for all “simple” sets
R. In the following lemma, we specify what we mean by “simple”.
Lemma 2. Let be a probability space, be a random vector and . If, for all :then R satisfies (8), i.e., there exists a countable set with: Proof. Consider the sets:
for
, which, obviously, are countable. Set:
Let
. If
is countable for
-almost all
, Fubini’s theorem implies:
Analogously, one can show the same if
is countable for
-almost all
. □
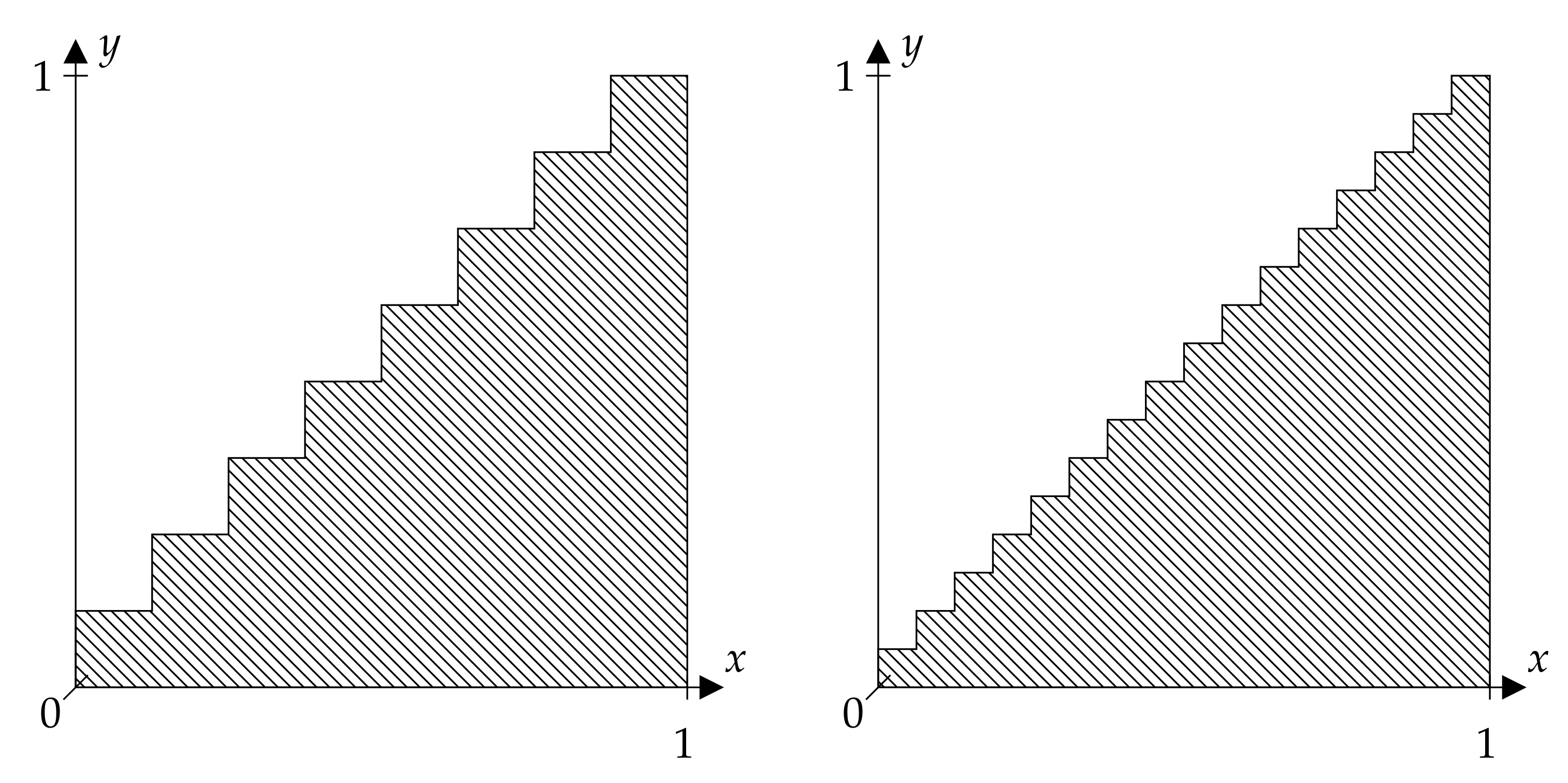
Remark 2. The patterns visualized in Figure 1 could also be defined on the whole real axis instead of a bounded interval by, for example, applying the transformation . Then, is a pattern defined on if R is defined on . In the following three subsections, Y is assumed to be constant, and hence can be omitted.
4.2. Basic Ordinal Patterns
If:
(see
Figure 1a), then
is just the distribution function of
, i.e.,
. Since
is finite for all
, (
8) holds true by Lemma 2. According to Lemma 1, one has:
for all
and
. Therefore:
is equivalent to:
By Theorem 1, for ergodic systems, condition (
14) implies (
10). A more general statement also includes a large class of non-ergodic systems which was shown in [
4]. Condition (
14) is, for example, satisfied if
and
is the projection on the
i-th coordinate for all
, or if
is a compact Hausdorff space and
is injective and continuous. One can also use Taken’s theorem to argue that the set of maps
that satisfy (
14) is large in a certain topological sense. For both, see Keller [
8].
4.3. Patterns Defined by “Injective” Functions
Let
be a random vector and consider now:
for a
measurable function
(see
Figure 1b). Since
is finite for all
, (
8) holds true by Lemma 2. Moreover, one easily sees that
.
Now, suppose that:
holds true for all
. This directly yields:
for all
and
. Remember that
holds true according to Lemma 1. Thus, (
14) and (
16) imply (
10). When considering basic ordinal patterns in
Section 4.2, we stated some conditions under which (
14) holds true. It remains to consider when (
16) is satisfied.
Assume that
g maps Borel sets to Borel sets and is injective. This implies:
for all
and
. Now, suppose that:
holds true. This would then imply (
16). However, the above equation only holds true
-almost surely (see (
13)). This can be a problem when applying the function
g because there could exist sets
with
but
. Additionally, we therefore need to require that
implies
for all
.
Theorem 1 then provides the following statement:
Corollary 1. Let be an ergodic measure-preserving dynamical system, be a random vector and be a timing. Let further be a measurable function which maps Borel sets to Borel sets, is injective on and satisfies for all and . Let .
Then, (14) implies (10). Moreover, (10) holds true if and is the projection on the i-th coordinate for all or if Ω is a compact Hausdorff space and is injective and continuous. Note that the statements in Corollary 1, in principle, were shown in [
6]. The case of basic ordinal patterns is included by
for all
.
4.4. Patterns Defined by “Surjective” Functions
Swapping coordinates in (
15) yields the set:
(see
Figure 1c) with (
8) following from Lemma 2 and with:
Corollary 2. Let be an ergodic measure-preserving dynamical system, be a random vector and be a timing. Let further be a measurable function and let . Then, the following holds:
- (i)
If is injective on for , (14) implies (10). - (ii)
If and is the projection on the i-th coordinate for all or if Ω is a compact Hausdorff space and is injective and continuous, if further for every non-empty open set , g is continuous and , then (10) is valid in each of the following two cases: - (1)
For each and all with , there exists some with ,
- (2)
Ω is connected.
Proof.
(i): If the above assumptions are satisfied and
is injective on
for all
, then by Lemma 1 it holds that
for all
and
. This implies (
9), hence, by Theorem 1 the statement (
10).
(ii): Given the assumptions of (ii), we have to show that is injective on for all . If is connected, then (1) is obviously satisfied. We can thus start from (1). Take with . Then, is non-empty and because is continuous, contains a non-empty open set. This implies that . because every non-empty open set was assumed to have a strictly positive measure. □
Notice that, unlike in (
15), it is not necessary that
g is one-to-one.
4.5. Piecewise Patterns
The previous subsection illustrates that (
9) is fulfilled if, roughly speaking,
preserves all information and if
is a
almost surely invertible function for all
. The finite-valued random variable
Y in (
9) can be used to weaken the condition of invertibility in the sense that only piecewise invertibility is needed where the different pieces are induced by the random variable
Y.
For
and an absolutely continuous measure
, one could, for example, consider:
for any
, as shown for
in
Figure 1d. The set
R satisfies condition (
9) with
for
and
. The set
R is a pattern with
circles of diameter
distributed in
on a square grid.
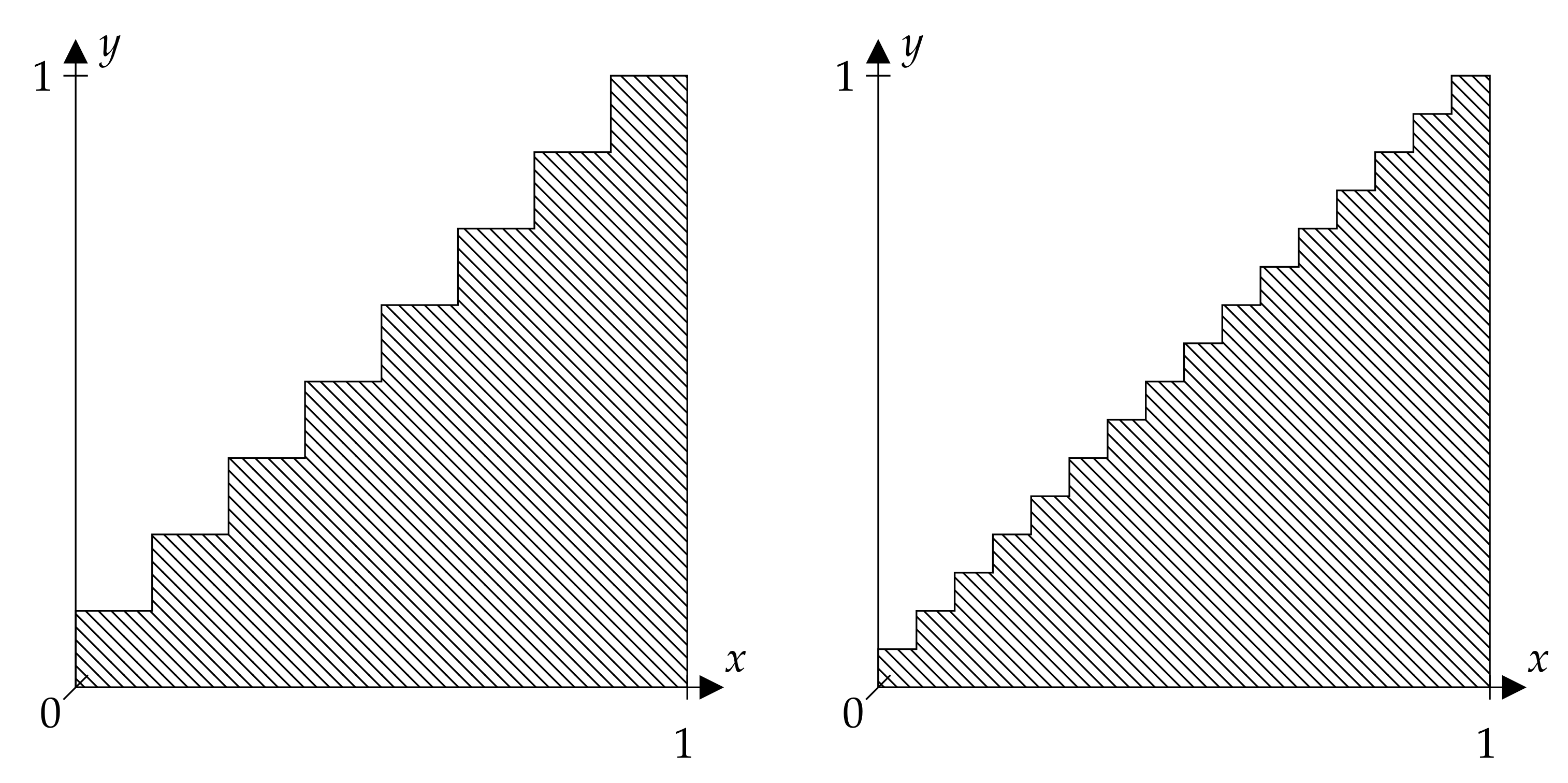
4.6. A Remark on the Work of Amigó et al.
Consider the discriminating relation:
shown in
Figure 3 for
. Assume for simplicity that the dynamical system is defined on
and that
X is the identity map
. It is easy to see that:
holds true, where
. Therefore, (9) in Theorem 1 holds true if
is a generating partition.
Additionally, one could consider the quantity:
which was introduced by Amigó et. al. [
9]. They used finite-valued random variables to quantize the dynamical system into
k parts and considered the ordinal patterns of the quantized systems while we directly apply the quantization to the discriminating relation. Both approaches only differ in their notation. They showed in their paper that the limit in (
18) is equal to the Kolmogorov–Sinai entropy.
5. Proof of the Main Statement
We first recall some definitions and statements related to partitions and the conditional entropy. For two partitions
of
, the
conditional entropy is defined as
Roughly speaking, the conditional entropy
describes how much uncertainty is left in the outcomes described by the sets given in
if one already has information about the outcomes described by the sets given in
. For example, if
, then
. However, if
and
are independent, meaning that
for all
and
, and
.
Without explicitly referencing them, we will use the following properties of the conditional entropy:
- (i)
,
- (ii)
,
- (iii)
.
See, for examples, [
7] for proofs.
A sequence of partitions
in
of
is said to be generating (the
-algebra
), if
for all
and:
holds true. As a consequence of this property:
holds true for all partitions
of
. Using the properties of the conditional entropy implies:
For
:
will denote the partition of
in
equally sized intervals.
We start the proof of Theorem 1 with two basic lemmata.
Lemma 3. Let be a measure-preserving dynamical system, be a random vector and Y be a random variable satisfying (9). Then, there exists some constant with:for all . Proof. Fix
. Set:
Since
Y was assumed to attain only a finite number of different values,
is a finite partition of
. Because the Borel
-algebra of
is generated by the partitions
and due to (
9), we have:
Thus, for any
and any finite partition
of
, there exists an
and a
with:
for all
. Hence:
for any
, which implies:
□
Lemma 4. Let be a probability space, be a random variable and . Then:holds true. Proof. For all
:
holds true. Analogously, one can show:
This implies:
and, by Fubini’s theorem:
□
Therefore, in particular, the above lemma implies that, if is a sequence of sets in with , then converges to in for .
Given
and a random variable
, consider the function
with:
We want to show that
converges to
for all
and
-almost all
. If
is monotone in
x for all
and
, this can be shown relatively easily using the pointwise ergodic theorem and the monotonicity of the considered functions. Monotonicity is guaranteed, if
implies:
For example, if
, the above implication holds true. For this special case, a proof of the statement in Lemma 5 can be found in [
4].
However, we are interested in general sets and therefore, cannot use the monotonicity. Therefore, we have to prove this statement differently.
Lemma 5. Let be an ergodic measure-preserving dynamical system, be a random vector and satisfy (8). Then, for all , there exist sets and with satisfying:for all and . Proof. Fix
. According to (
8), there exists a countable set
with:
By the pointwise ergodic theorem (see, e.g., [
10]), for all
, there exists
with
and:
for all
. It is easy to see that:
holds true for all
and
if
. Hence:
for all
and
. Using Fatou’s lemma and the fact that
C is countable implies:
for all
and
. We will use this fact later.
Since
is open, there exists a countable collection of pairwise disjoint rectangles
with:
Take
for all
. Using the pointwise ergodic theorem, for all
there exists a set
with
and:
for all
. Because
is a rectangle, for all
:
holds true for all
with
and:
holds true for all
with
. Together with (
23), this implies:
for all
and
.
Set
. Lemma 4 provides:
Therefore, there exists a set
with
and a sequence
with:
for all
. Thus:
for all
and
. Because
is open as well, one can analogously show that there exist sets
and
with
and:
for all
and
. This implies:
Hence:
for all
and
. □
Given a random vector
and
, we define the partition:
for all
, which is equal to:
Lemma 1. Let be an ergodic measure-preserving dynamical system, be a random vector, be a timing and satisfying (8). Then, there exists a sequence with:for all and . Proof. Because
is a timing, there exist a sequence
with:
So one can find a strictly increasing sequence
with:
for all
and:
Now, fix
. According to Lemma 5, there exist sets
and
with
satisfying:
for all
and
. Set
Consider the function
with:
Then:
for all
.
It is easy to see that:
holds true for all
. This implies (see for instance [
11], Theorem 13.4 (i)):
Therefore
is a sequence of partitions generating
. By (
19), this implies:
for all
. Set:
Notice that:
holds true for all
. Consequently:
for all
. □
We can now finalize the proof of Theorem 1.
Proof of Theorem 1.
Let
and
. Set:
and:
for all
and
. According to Lemma 1, there exists a sequence
with:
for all
. We have:
for all
. This implies:
Using Lemma 3, we can conclude that there exists a constant
with:
for all
. Thus:
which is equivalent to:
On the other hand:
which, together with (
31), finishes the proof. □
6. Conclusions
We discussed a special “two-dimensional” approach to symbolic dynamics differing from many usual approaches which was introduced in [
6]. From the practical viewpoint, the difference can be illustrated as follows: given the time-dependent measurements of a real-valued quantity, a symbolization is not conducted for the measurements themselves as in usual approaches, but for pairs of measurements at two different times. This means that to each pair of possible measured values, a symbol from a finite symbol set is assigned. Here, we only considered two symbols which lead to a partitioning of the two-dimensional real space
into a set
R and its complement
. In usual approaches, partitions of
are considered. (Advantages of the “two-dimensional” approach are described in [
6]).
The set
R, called a discriminating relation, was considered as a basic building block for constructing partitions of the state space of a given dynamical system, having time-dependent measurements of finitely many quantities in mind. In addition to the discrimination relation, the second central concept was the concept of a timing which roughly describes which pairs of times are included in the symbolization process and guarantees that there are not too few such pairs. The central question of the paper was that of under which conditions on a discriminating relation
R the partitions constructed from
R determine the KS entropy of a measure-preserving dynamical system. With Theorem 1, we gave a relatively general statement partially answering this question. Some specifications of the theorem in
Section 4 illustrate the nature of “successful” discriminating relations.
Although the statement of Theorem 1 appears relatively natural when looking at the proofs a little closer, we do not expect that all cases where the K-S entropy can be constructed based on a discriminating relation is covered by the statement; however, we have no counterexample. The main tool used in the proofs of the results is the pointwise ergodic theorem. It allows to establish a connection between the generalized ordinal patterns and the shape of the discriminating relation.
The results of this paper, being on a rather abstract level, give some insights as to why the idea of ordinal patterns is working well, as reported by several applied papers, with extracting those advantageous features being more general than in the original ordinal approach. Having many choices for a discriminating relation, for practical purposes such as, for example, in a classification context, one needs methods and criteria for finding good discrimination relations, adapted to given data and problems. This is an important challenge for further research related to the given approach to symbolic dynamics. A further aspect is to discuss the approach for partitioning the into more than two pieces.




{kind=link}
{kind=link}
{kind=link}