Abstract
In this paper, we investigate the finite-time synchronization problem for a class of Markovian jumping complex networks (MJCNs) with non-identical nodes and impulsive effects. Sufficient conditions for the MJCNs are presented based on an M-matrix technique, Lyapunov function method, stochastic analysis technique, and suitable comparison systems to guarantee finite-time synchronization. At last, numerical examples are exploited to illustrate our theoretical results, and they testify the effectiveness of our results for complex dynamic systems.
1. Introduction
Over the past decades, owing to the wide applications in engineering and science, for instance, the Internet, power grid networks and communication networks, the search efforts of complex networks have improved considerably [1,2,3,4,5]. Complex networks consist of a great deal of interconnected nodes. As a basic unit, every node has special dynamic behavior different from other nodes. Different types of complex networks have different types of connections. Besides, whether or not the nodes have weight also determines the types of complex networks. The complexity of complex networks is not only manifested in the topological, but also reflected in dynamic movement of the network nodes. Because of the complexity of the network, it has given rise to wide attention from scholars in different fields. In particular, as a hot topic, the synchronization of network nodes has been studied by researchers in kinds of fields [6,7,8,9].
Many publications have presented results concerning asymptotic synchronization of complex networks [9,10,11,12,13,14,15]. Only when the time reaches infinity can the state of the coupling system reach synchronization. That is called asymptotic synchronization. However, asymptotic synchronization is not keeping with practical logic because apparatus and human beings have a limited life span. Consequently, convergence rate is a greatly important index when we study synchronization of complex networks. Therefore, the faster a complex network achieves synchronization, the less resources it consumes.
A notably effective method for achieving faster synchronization is to use a finite-time control technique. The finite-time control technique has several advantages [16,17]. In a settling time, this method can synchronize all nodes in the network. Finite-time control has not only improved robustness of systems but also ameliorated disturbance rejection properties [18,19,20,21,22]. As a result, the finite-time control technique is a more desirable method for achieving synchronization, and it has been widely studied.
In real applications, it is noted that communication signals may be suddenly significantly changed at one time when signals are transmitted. This phenomenon is called impulsive effects [12,20,23,24]. The effects of impulse may promote synchronization or damage synchronization, or yield no effect on synchronization. Recently, based on the concept of average impulsive interval, in a unified framework, the authors in [12,23] studied the synchronization of complex networks with synchronous and desynchronization impulses, respectively. Because the synchronizing impulses are instrumental in synchronization of dynamic systems, many scholars have designed all kinds of impulsive controllers to achieve synchronization of complex networks [12]. In [25], authors proposed an impulsive control method to realize exponential synchronization of coupled complex networks. However, according to [26,27], the desynchronizing impulses which are called impulsive disturbance should not happen too frequently. Because of the instantaneous perturbations, the influence of impulsive disturbance is not negligible. Actually, based on analysis about the stability of impulsive system, a great of results only relate to the asymptotic synchronization, and the finite-time synchronization is less covered. Therefore, studying the finite-time synchronization of dynamic systems with impulsive effects is of vital importance to understand the behaviour of many dynamic networks in real life.
In addition, as a suitable mathematical model for describing a kind of complex network in which the topology is stochastic variation all of a sudden, Markovian jumping complex networks (MJCNs) have given rise to extensive attention among scholars [27,28]. Furthermore, considering that there is a kind of complex dynamic network with finite modes, these modes can switch from one to another at a certain moment. As a result, we consider that it can be looked upon as the frame of theory of the Markovian switching system. In this framework, the Markovian chain controls the switching between different nodes. Many interesting results about synchronization with Markovian chain networks have been reported [29,30,31,32]. In [30,31], the authors indicate that the complex dynamic networks with the Markov jumping topology structure can realize asymptotic synchronization. In [32], authors investigated a stability problem of a class of discrete-time Markovian jumping system via state and mode feedback control. To our best knowledge, by introducing uncertain parameters, the influence of uncertainties in Markovian chains is overcome by a typical method that results in dependence on uncertain-parameter norm of asymptotic synchronization [29,30,31]. However, we need to synchronize the network in finite time in real world. Hence, it is of great importance that we study the finite-time synchronization of MJCNs to meet the needs of the real world.
Note that amounts of published works involved the synchronization of complex dynamic networks usually assume that a series of nodes in the complex dynamic network are identical. From the view of real world, this assumption is impractical for complex networks including all kinds of nodes that usually have different physical parameters [33]. As far as we know, in the previous literature, authors have extensively studied synchronization problems of complex networks with non-identical nodes [34,35,36]. In [34], impulsive complex networks with delayed nonidentical nodes were investigated by Razumikhin technique, a convex combination technique and time varying Lyapunov function. In [36], the authors designed a set of new controllers to achieve finite-time synchronization of dynamic systems with non-identical discontinuous nodes. However, it is remarkable that the problems of finite-time synchronization of non-identity-nodes systems with impulsive effects and markovian jumping topology has not been appropriately investigated.
Motivated by these ideas, it is our task to discuss the finite-time synchronization of Markovian jumping complex dynamic networks with non-identical nodes and impulsive effects. What’s more, a summary of the main contributions in this paper can be listed as follows:
- The article considers a class of Markovian jumping complex dynamic networks with non-identical nodes and impulsive effects. The system model is more comprehensive and closer to engineering practice. The finite-time method has such outstanding disturbance rejection capability that the results of this subject are of great significance.
- We propose a new one-norm-based Lyapunov function to solve the difficult points induced by non-identical nodes and impulsive effects. Also, we use the monotonicity to analyze the finite-time synchronization instead of the traditional theorem, and settling time can be theoretically estimated for a given network.
- Without drawing into any uncertain parameters, the finite time synchronization of dynamic systems is guaranteed by using the stochastic analysis technique, the M-matrix technique and some effective conditions.
The rest of this article is organized as follows. In Section 2, model description and preliminaries are presented. Section 3 introduces the problem of finite-time synchronization of MJCNs with non-identical nodes and impulsive effects, and the convergence analysis is fully derived. In Section 4, we provide a detailed numerical simulations to demonstrate the effectiveness of results. The conclusion is drawn in the last.
Notations: There are some standard notations throughout this paper. is a column vector with all the elements being invariant constant 1. denotes the set of all matrices and is the n-dimensional Euclidean space. represents the one-norm of a matrix or a vector, i.e., for and, for . denotes the sign function. denotes the set of positive integers and real numbers. Let be a complete probability space with filtration satisfying the usual conditions (i.e., the filtration contains all -null sets and is right continuous), and represents the mathematical expectation operator with respect to a given probability measure .
2. Model Description and Preliminaries
The following preliminaries and necessary assumptions about the system are used throughout this article in this section. Next, we briefly outline the problem formulation. Let be a right continuous Markovian chain on the probability space which takes values in the finite state space with generator given by
where and , is the transfer rate from i to j if , yet . The matrix is assumed to be irreducible as a typical hypothesis. Another way to think about this amounts to the situation that, for any , we could get and such that are all positive.
Consider the following nonlinear coupled dynamic systems consisting of N non-identical nodes with Markovian jumping. The ith node is an n-dimensional coupled dynamic system, i.e.,
where is the state of the ith node at time t, is a continuously nonlinear dynamic function, ; and is the outer coupling matrix of complex dynamic network, which is defined as follows: if there is a connection between node j and node at time t, then , otherwise, . We give a definition about the diagonal elements as . is the Markovian process in continuous time, which is represented by the evolution of the node at time t. is an inner coupling matrix with .
The main purpose of this article is to synchronize all of the non-identical nodes of system (1) with the following isolate node:
with the initial value , where denotes state of the given isolated node, and is a differentiable nonlinear dynamic function with continuity.
Furthermore, in the signal transmission process, signals may be suddenly changed at some discrete time [12,23]. The state with step change can be represented as a class of differential equation with impulsive effects. Note that the impulsive effects widely found in many processes may potentially have a significant impact on synchronization. Hence, we consider the controlled complex network with impulsive effects as follows:
where , , , , is an impulsive sequence satisfying , and , is the controller to be designed. , constant is an impulsive gain. Furthermore, in this paper, it is assumed that the pulse phenomena does not rely on the Markovian chain.
Remark 1.
Signals may be suddenly changed in the form of impulses during signal transmission at some discrete time , and the impulsive gains can be different from node to node. Additionally, at different impulsive instants, they may be diverse. Thus, . Impulsive effects are considered as synchronous impulses and desynchronous impulses in this paper, respectively. For analytical simplicity, we should note the impulsive gains as .
Before presenting the main results, some basic assumptions and definitions are presented as follows:
Assumption 1.
For any and , there exists constant such that, for
Assumption 2.
There exist positive constants and such that, respectively, for
Definition 1
([37]).The MJCNs (3) is said to be synchronized onto (2) in finite time by putting in a proper designed controller , if there exists a constant , where relies on the initial state , and the initial value of the Markovian chain , such that and for . is called as the settling time in this paper.
Definition 2
([23]).Average impulsive interval of impulsive sequence is equivalent to if there exists a positive integer and a positive constant such that
for any , represents the number of impulsive times of the impulsive sequence ς on the interval .
Definition 3
([38]).A nonpositive real matrix with for is known as Minkowski matrix (M-matrix for short) if all the eigenvalues of A have positive real parts.
Some significant lemmas are listed in the following part and they are required to obtain the results in this paper.
Lemma 1
([38]).The following descriptions are equivalent if with :
- (1)
- All the eigenvalues of A have positive real parts.
- (2)
- A is a nonsingular Minkowski matrix (M-matrix).
- (3)
- exists and all the elments of are nonnegative.
Lemma 2
([37]).Let with , , , with . The is a nonsingular M-matrix if matrix A is irreducible.
Lemma 3
([37]).Suppose , where , we obtain . Denote . The new matrix is a nonsingular M-matrix according to Lemma 2 and the irreducibility of Θ. All the elements of are nonnegative because of Lemma 1. At least one positive element exists in each row of since is an invertible matrix,. λ is denoted to the maximum of the row sums of . Then, all the elements of are positive and
3. Finite-Time Synchronization of the Complex Networks
In this section, a theorem is presented to synchronize the MJCNs (3) with non-identical nodes and impulsive disturbances onto the system (2). Moreover, the setting time is theoretically estimated.
For notation simplicity, we define and , where .
Subtracting Equation (2) from Equation (3), we obtain the error dynamical system as follows:
where , .
To achieve the aim of finite-time synchronization, we propose the following controller for node i:
where are determined constants, is an adjustable parameter, and .
Theorem 1.
For system (3) with controller (9), suppose that Assumptions 1 and 2 hold. The average impulsive interval of the impulsive sequence is . Then, the following conditions are satisfied:
for , it can be concluded that:
- (1)
- when , andthe complex dynamic networks (3) can achieve synchronization with systems (2) in finite time, and the settling time is
- (2)
- when , the complex dynamic networks (3) is synchronized onto systems (2) in finite time, and the settling time is
- (3)
- when , the complex dynamic networks (3) is synchronized onto systems (2) within finite time, and the settling time iswhere , represents the Lipschitz coefficient of ith node, , , , defining has been referred to cursorily in Lemma 3, . is the initial value of the Markovian chain, .
Proof.
Construct the following Lyapunov function candidate with Markovian switch for :
We use to represent the infinitesimal operator of . When , according to It differential formula, it is differentiated from along the trajectory of (8), which gives that, for
where .
Based on Assumption 1, one obtains
Note that in Assumption 2,
and substituting (18) and (19) into (17) yields
After careful planning and analysis, we find that
By Lemma 3, it follows from inequality (7) that . Therefore, according to (7) and (21), we can obtain that
Let ,therefore, it is obtained that
Based on the arbitrariness of , by taking mathematical expectation, it follows from (23) that
When , we can get from (16) and the second equation of (8) that
Consider the following comparison system:
Consider is an equilibrium point of the error system (8),when , we find that which is equivalent to in (26). Therefore, comparing (24) and (25) with (26), one can see that indicates for . According to the Squeeze Theorem, we can derive that if .
By using reduction to absurdity, we can prove Theorem 1 properly. If there exists such that , then it is obtained from (26) that for all . If not, there exists such that . Let , then , and for all . Moreover, is monotonic increasing on the interval because of existing , i.e., for , which contradicts the first equation of (26). In the meantime, and for all , which indicates that and for .
The value will lead to . Next, we give the provement about estimating the settling time , and there are three cases to be considered in the following part.
When , according to (26), we can deduce that when , it yields that .
Similarly, for , one obtains that .
By iteration, the above equations are incorporated as follows:
In the case of it can be deduced on the basis of (6) and (27) that
Considering (12) and the fact that , the right-hand side of (28) becomes zero because of existing and
When , it can be obtained from (27) that .
Similarly, when , we can get that
Since , , and , the right-hand side of (30) becomes zero due to exist , and
Based on the above analysis, we can obtain that and for . On the basis of Definition 1, the complex dynamic network (2) can realize synchronization with (3) in finite time via the control law (9). This completes the proof of the Theorem 1. □
Remark 2.
As a classic example, the upper bound and lower bound of impulsive intervals are demonstrated by the Example 3 in the reference [23]. The impulsive sequence can be expressed as the following equation
where ε and denotes positive numbers satisfying ; represents the remainder of k dividing by and . According to (32), we can obtain that and . The quantity will be quite small, and the quantity will be very big if ε is small enough and is sufficiently large. In such a situation, two types of impulsive effects, namely, synchronizing impulses and desynchronizing impulses are considered in this article. In order to ensure the finite-time synchronization desynchronizing impulses shouldn’t occur frequently. Given the analysis provided above, our criterion in Theorem 1 is proper for impulsive control signals which have a wider range. Compared with the results deriving by , our results are less conservative. To guarantee that the impulses do not occur too frequently, the positive integer will not be too large. Accordingly, the impulsive interval will not be too small.
It is worth noting that our work is affected by the maximum average impulsive intervals and the minimum average impulsive intervals. Are the networks (3) synchronized to the isolate system (2) in finite-time with the maximum average impulsive intervals and the minimum average impulsive intervals? To answer these questions it is worthwhile to investigate the influence of the maximum average and the minimum average impulsive intervals.
Respectively, we replace with and , and the inequality (6) will be adapted to the following form
for any , where .
Corollary 1.
For system (3) with controller (9), assume that Assumptions 1 and 2 hold. The minimum impulsive interval and the maximum impulsive interval of impulsive signals are and , respectively. There exists a positive number α such that , and satisfied conditions are listed as follows:
for , then complex dynamical network (3) with controller (9) is synchronized onto system (2) in a finite time , where , is defined in the proof, . is the initial value of the Markovian chain.
When , according to (26), we can deduce that
In the case of , it can be deduced on the basis of (33) and (37) that
Compute the derivative of
Then, let , we can find that
Then we can obtain that
Furthermore, since , we can get
According to the existence theorem of zero point, for , we can get that has one zero point .
Corollary 2.
For system (3) with controller (9), assume that Assumptions 1 and 2 hold. The minimum impulsive interval and the maximum impulsive interval of impulsive signals are and , respectively. There exists a positive number exists α such that , and the satisfied conditions are listed as follows:
for , then complex dynamical network (3) with controller (9) is synchronized onto system (2) in a finite time , where , is defined in the proof, . is the initial value of the Markovian chain.
The proof is similar to that of Corollary 1, so we omit it.
Remark 3.
Corollary 2 and Theorem 1 indicate that average impulsive interval does not matter to the finite-time synchronization when .
4. Numerical Examples
In this section, numerical simulations are provided to demonstrate that the applications of the theorem described above are valid. Using the similar example as that given in [33], we also consider two different chaotic node systems as follows:
where . Figure 1 and Figure 2 depict the chaotic trajectories of (43) with different initial values and , respectively. Then, Figure 3 depicts the chaotic trajectories of (44) with the initial value .
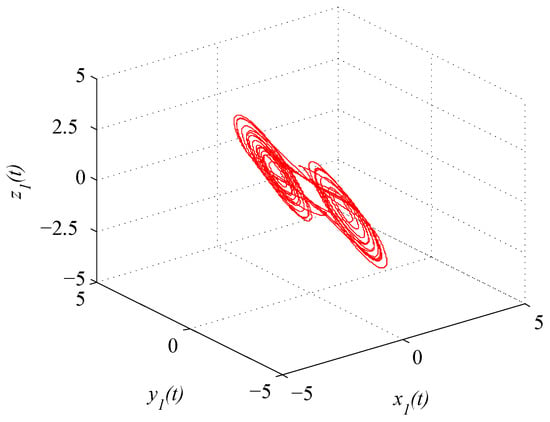
Figure 1.
Chaotic trajectory of (43) with initial value .
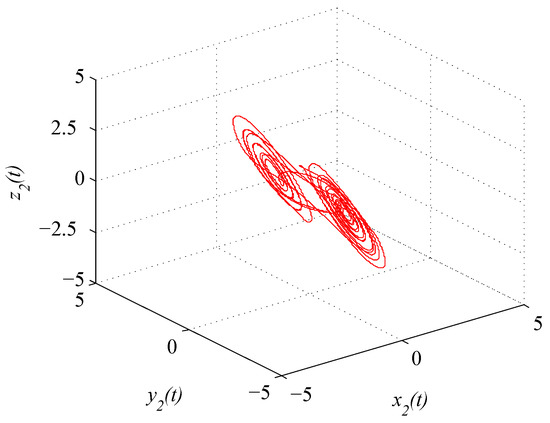
Figure 2.
Chaotic trajectory of (43) with initial value .
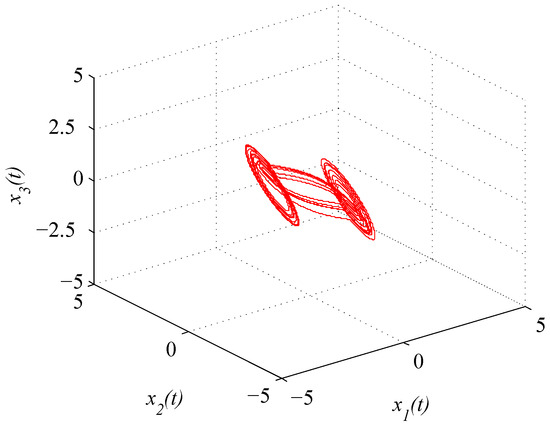
Figure 3.
Chaotic trajectory of (44) with initial value .
In the following, consider a coupled complex network being composed of two types of non-identical chaotic nodes (43) and (44), which are described such that:
where and and the outer coupling matrix is supposed to be
Moreover, the transition probability matrix is given as
According to Assumption 1, we can verify the matrix which is similar to [33] satisfying with
We synchronize (45) onto the following isolated node system:
where . The initial condition is taken as . Figure 4 shows the chaotic trajectory of (46).

Figure 4.
Chaotic trajectory of (46) with initial value .
Remark 4.
In numerical simulations, choosing different initial values under identical chaotic systems and choosing the same initial values under non-identical chaotic systems for comparison can more effectively illustrate the results of this study.
The same as [33] calculated simply, it can be easily calculated the corresponding parameters as Thus, choosing we obtain Furthermore, from we find The initial values are arbitrarily and evenly chosen from and we find .
In the following section, we verify Theorem 1. The parameters in the simulations are taken as step-length at 0.0001. We choose for any because of the impulsive disturbance. Accordingly, we use . Additionally, we choose and . By simple computation, we obtain . The condition (12) in Theorem 1 implies that should be satisfied. Consider According to the Equation (13), the complex network is synchronized with the isolates node within . The synchronization trajectories are shown in Figure 5, Figure 6 and Figure 7. The figures depict that the complex network (3) is synchronized with (2) before .
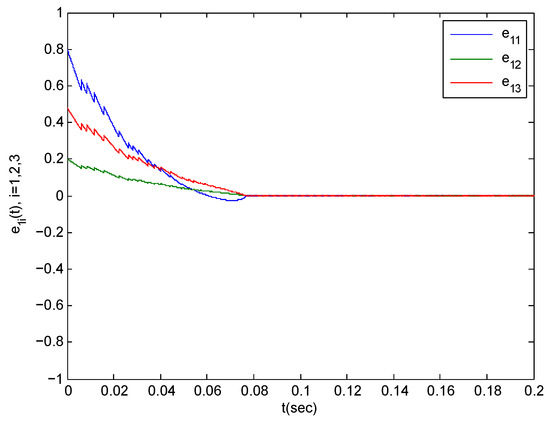
Figure 5.
The synchronization error trajectories of complex system (44) with isolated system (46) with an initial value of under control.
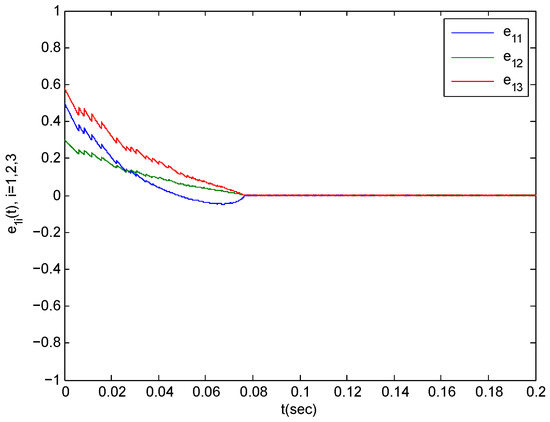
Figure 6.
The synchronization error trajectories of complex system (44) with isolated system (46) with an initial value of under control.
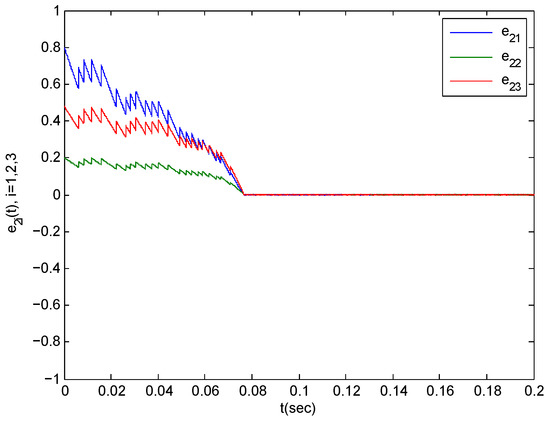
Figure 7.
The synchronization error trajectories of complex system (45) with isolated system (46) with an initial value of under control.
Remark 5.
It is well known that time is not negative, therefore, in (12) of Theorem 1 should not be too small. Otherwise, this kind of statements will reflect a real world situation and will not be in synchronization.
Remark 6.
In Corollary 1, we choose the same data for the simulation. We obtain the result , and . From the simulation data, we can get . Obviously, our criterion is suitable for a wider range of impulsive signals. Because the impulsive effect discussed in this paper is considered to be disturbance, the impulses should not occur frequently. Comparing the range of and , we see that an average impulsive interval of is better than the average impulsive interval of .
5. Conclusions
In this paper, we have studied the finite-time synchronization of the MJCNs with non-identical nodes and impulsive effects. Sufficient conditions for the MJCNs are presented based on the M-matrix technique, the Lyapunov function method, the stochastic analysis technique and suitable comparison systems to ensure the finite-time synchronization of the communication systems. We show that the MJCNs with non-identical nodes and impulsive effects can reach synchronization within a finite time through rigorous mathematical derivation and simulation examples.
In the real world, we realize that a more general class of complex networks does not have complete information. Therefore, we would further investigate how to synchronize the complex networks with incomplete information in finite time.
Author Contributions
Conceptualization, T.C. and Z.Z.; Investigation, S.P.; Validation, S.P.; Writing—original draft, T.C.; Writing—review & editing, T.C.
Acknowledgments
The work was supported by the Natural Science Foundation of China under Grants 61374081 and 61973092.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yang, T.; Feng, Q.; Gao, H.; Kurths, J. Synchronization in complex networks and its application—A survey of recent advances and challenges. Annu. Rev. Control 2014, 38, 184–198. [Google Scholar]
- Yu, W.; Chen, G.; Lü, J. On pinning synchronization of complex dynamical networks. Automatica 2009, 45, 429–435. [Google Scholar] [CrossRef]
- Stella, M.; De Domenico, M. Distance Entropy Cartography Characterises Centrality in Complex Networks. Entropy 2018, 20, 268. [Google Scholar] [CrossRef]
- Wu, X. Exponential Synchronization of Two Complex Dynamical Networks of Random Disturbance with Both Mixed Coupled and Time-Varying Delay by Pinning Control. Entropy 2015, 17, 6937–6953. [Google Scholar] [CrossRef]
- Ma, W.; Wu, Y.; Li, C. Pinning Synchronization between Two General Fractional Complex Dynamical Networks With External Disturbances. IEEE/CAA J. Autom. Sin. 2017, 4, 332–339. [Google Scholar] [CrossRef]
- Wang, J.L.; Wu, H.N.; Huang, T. Passivity-based synchronization of a class of complex dynamical networks with time-varying delay. Automatica 2015, 56, 105–112. [Google Scholar] [CrossRef]
- Ahmed, M.A.A.; Liu, Y.; Zhang, W.; Alsaadi, F.E. Exponential synchronization via pinning adaptive control for complex networks of networks with time delays. Neurocomputing 2017, 225, 198–204. [Google Scholar] [CrossRef]
- Yang, X. Can neural networks with arbitrary delays be finite-timely synchronized? Neurocomputing 2014, 143, 275–281. [Google Scholar] [CrossRef]
- Zhou, J.; Lu, J.A. Pinning adaptive synchronization of a general complex dynamical network. Automatica 2008, 44, 996–1003. [Google Scholar] [CrossRef]
- Khadra, A.; Liu, X.Z.; Shen, X. Analyzing the Robustness of Impulsive Synchronization Coupled by Linear Delayed Impulses. IEEE Trans. Autom. Control 2009, 54, 923–928. [Google Scholar] [CrossRef]
- Lu, J.; Chen, G. A Time-Varying Complex Dynamical Network Model And Its Controlled Synchronization Criteria. IEEE Trans. Autom. Control 2005, 50, 841–846. [Google Scholar]
- Yang, X.; Cao, J.; Lu, J. Synchronization of delayed complex dynamical networks with impulsive and stochastic effects. Nonlinear Anal. Real World Appl. 2011, 12, 2252–2266. [Google Scholar] [CrossRef]
- Liu, T.; Hill, D.J.; Zhao, J. Synchronization of Dynamical Networks by Network Control. IEEE Trans. Autom. Control 2012, 57, 1574–1580. [Google Scholar] [CrossRef]
- Yang, X.; Zhu, Q.; Huang, C. Generalized lag-synchronization of chaotic mix-delayed systems with uncertain parameters and unknown perturbations. Nonlinear Anal. Real World Appl. 2011, 12, 93–105. [Google Scholar] [CrossRef]
- Tan, W.; Jiang, F.; Huang, C.; Zhou, L. Synchronization for a Class of Fractional-Order Hyperchaotic System and Its Application. J. Appl. Math. 2012, 2012, 974639. [Google Scholar] [CrossRef]
- Perruquetti, W.; Floquet, T.; Moulay, E. Finite-Time Observers: Application to Secure Communication. IEEE Trans. Autom. Control 2008, 53, 356–360. [Google Scholar] [CrossRef]
- Li, L.; Jian, J. Finite-Time Synchronization of Chaotic Complex Networks with Stochastic Disturbance. Entropy 2014, 17, 39–51. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Aghababa, H.P. Synchronization of mechanical horizontal platform systems in finite time. Appl. Math. Model. 2012, 36, 4579–4591. [Google Scholar] [CrossRef]
- Yang, X.; Cao, J. Finite-time stochastic synchronization of complex networks. Appl. Math. Model. 2010, 34, 3631–3641. [Google Scholar] [CrossRef]
- Khadra, A.; Liu, X.; Shen, X. Application of impulsive synchronization to communication security. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2003, 50, 341–351. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Khanmohammadi, S.; Alizadeh, G. Finite-time synchronization of two different chaotic systems with unknown parameters via sliding mode technique. Appl. Math. Model. 2011, 35, 3080–3091. [Google Scholar] [CrossRef]
- Vincent, U.E.; Guo, R. Finite-time synchronization for a class of chaotic and hyperchaotic systems via adaptive feedback controller. Phys. Lett. A 2011, 375, 2322–2326. [Google Scholar] [CrossRef]
- Lu, J.; Ho, D.W.C.; Cao, J. A unified synchronization criterion for impulsive dynamical networks. Automatica 2010, 46, 1215–1221. [Google Scholar] [CrossRef]
- Yang, X.; Huang, C.; Zou, X. Effect of impulsive controls in a model system for age-structured population over a patchy environment. J. Math. Biol. 2018, 76, 1387–1419. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Fu, S.; Li, W. Exponential synchronization for coupled complex networks with time-varying delays and stochastic perturbations via impulsive control. J. Frankl. Inst. 2019, 356, 492–513. [Google Scholar] [CrossRef]
- Jianquan, L.; Ho, D.W.C.; Jinde, C.; Jürgen, K. Exponential synchronization of linearly coupled neural networks with impulsive disturbances. IEEE Trans. Neural Netw. 2011, 22, 329–336. [Google Scholar]
- Ren, H.; Deng, F.; Peng, Y. Finite time synchronization of Markovian jumping stochastic complex dynamical systems with mix delays via hybrid control strategy. Neurocomputing 2018, 22, 683–693. [Google Scholar] [CrossRef]
- Wang, X.; Guo, Y. H-infinity Control for Markov Jump Systems with Nonlinear Noise Intensity Function and Uncertain Transition Rates. Entropy 2015, 17, 4762–4774. [Google Scholar] [CrossRef]
- Yurong, L.; Zidong, W.; Jinling, L.; Xiaohui, L. Stability and synchronization of discrete-time Markovian jumping neural networks with mixed mode-dependent time delays. IEEE Trans. Neural Netw. 2009, 20, 1102–1116. [Google Scholar] [CrossRef]
- Li, Z.X.; Ju, H.P.; Wu, Z.G. Synchronization of complex networks with nonhomogeneous Markov jump topology. Nonlinear Dyn. 2013, 74, 65–75. [Google Scholar] [CrossRef]
- Yang, X.; Cao, J.; Lu, J. Synchronization of Randomly Coupled Neural Networks with Markovian Jumping and Time-Delay. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 363–376. [Google Scholar] [CrossRef]
- Zhu, J.; Ding, Q.; Spiryagin, M.; Xie, W. State and mode feedback control for discrete-time Markovian jump linear systems with controllable MTPM. IEEE/CAA J. Autom. Sin. 2019, 6, 830–837. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; He, X.; Li, H. Finite-time synchronization of complex networks with non-identical nodes and impulsive disturbances. Mod. Phys. Lett. B 2018, 32, 1850002. [Google Scholar] [CrossRef]
- Yu, T.; Cao, D.; Yang, Y.; Liu, S.; Huang, W. Robust synchronization of impulsively coupled complex dynamical network with delayed nonidentical nodes. Chaos Solitons Fractals 2016, 87, 92–101. [Google Scholar] [CrossRef]
- Zhao, J.; Hill, D.J.; Liu, T. Synchronization of Dynamical Networks with Nonidentical Nodes: Criteria and Control. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 584–594. [Google Scholar] [CrossRef]
- Yang, X.; Wu, Z.; Cao, J. Finite-time synchronization of complex networks with nonidentical discontinuous nodes. Nonlinear Dyn. 2013, 73, 2313–2327. [Google Scholar] [CrossRef]
- Yang, X.; Lu, J. Finite-Time Synchronization of Coupled Networks with Markovian Topology and Impulsive Effects. IEEE Trans. Autom. Control 2016, 61, 2256–2261. [Google Scholar] [CrossRef]
- Horn, R.A.; Johnson, C.R. Topics in Matrix Analysis; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).