Abstract
This paper considers the consensus problem of nonlinear multi-agent systems under switching directed topologies. Specifically, the dynamics of each agent incorporates an intrinsic nonlinear term and the interaction topology may not contain a spanning tree at any time. By designing a state-controlled switching law, we show that the multi-agent system with the neighbor-based protocol can achieve consensus if the switching topologies jointly contain a spanning tree. Moreover, an easily manageable algebraic criterion is deduced to unravel the underlying mechanisms in reaching consensus. Finally, a numerical example is exploited to illustrate the effectiveness of the developed theoretical results.
1. Introduction
Recent years have witnessed a growing interest in the consensus problem of multi-agent systems in system and control community. A lot of effort has been made to design distributed control law for each agent such that the system as a whole can perform complex tasks in a cooperative manner. The distinguishing feature of such control law lies in its lack of global information while aiming to cooperate with all agents. In this paper, we deal with the consensus problem of multi-agent systems with nonlinear dynamics and switching topologies jointly containing a spanning tree.
Over the past decade, many well-known results on consensus have been reported in [1,2,3,4,5,6,7], to name just a few. Based on algebraic graph theory, Olfati-Saber and Murray [1] discussed the consensus problem for networked single-integrator agents over directed fixed and switching topologies with communication time-delays. Following this work, the consensus problem has been recently investigated from various perspectives, for example, system with second-order dynamics [8,9], nonlinear agent dynamics [10,11], time-delays [12,13], quantization [14], saturation [15], etc. However, most of the aforementioned works were predominantly concerned with the multi-agent systems under fixed communication topologies.
In practical application, the interaction topology among agents may change dynamically due to the limited sensing regions of sensors or effect of obstacles. Different assumptions on the switching topologies for multi-agent systems have been explored in recent years [16,17,18]. By assuming that the switching topologies keep connected or contain a spanning tree at every time, a heap of results have been reported [19,20,21,22,23]. However, it is impractical to impose the connectivity condition on all possible topologies. Thus, seeking feasible while less restrictive condition on the switching topologies becomes a mix of diverse challenging, yet interesting topic. In discrete-time setting, Jadbabaie et al. [24] provided a simple consensus protocol for Vicsek’s model [25], which was analyzed theoretically by exploiting properties of products of stochastic matrices under jointly connected topologies. The result was later extended in [26] to the case of directed graphs where conditions for consensus under switching interaction topologies were presented. For continuous-time systems, Hong et al. [27] proposed a local control strategy for multi-agent systems with jointly connected topologies. In [28,29,30], the switching communication topologies were assumed to be governed by continuous-time homogeneous Markov processes, whose state space corresponds to the communication patterns. The authors of [31,32,33] considered continuous-time multi-agent systems under jointly connected topologies, which had less constraints on each possible topology. However, these results are quite conservative in the sense that the underlying topology of the system switches without concerning the current states of the multi-agent systems.
Inspired by the above discussion, this paper aims to investigate the leadless consensus problem of multi-agent systems with Lipschitz nonlinear dynamics over state-controlled switching topologies. Relevant work can be found in [34], where the author studied leader-following consensus for double-integrator-based multi-agent systems under jointly connected topologies. In this paper, all possible topologies are allowed to be disconnected, and only jointly contains a spanning tree is required for the system to achieve consensus. By using the state transformation method, the consensus problem becomes a stability problem of a nonlinear switched system. Then, based on the Lyapunov stability approach, the consensus of the considered system is proved to be achieved with a prescribed consensus error. The contribution of this paper can be ascribed as follows: (1) Inspired by the stabilizing switching theory [35], we design a state-controlled switching law for the considered switching topologies. To avoid the switching signal from chattering, a new mechanism is introduced, and then, the low bound of dwell time of switching topologies is explicitly calculated. This is neglected in [34]; therefore, the controllers therein may suffer from chattering. (2) The dynamics of multi-agent system incorporates nonlinearities, which have been less reported in the literature, especially when the topologies are assumed to jointly contain a spanning tree. This paper attempts to explore the consensus of multi-agent systems with both nonlinear dynamics and state-controlled switching topologies, which thus constitutes a necessary complement to the existing literature.
The rest of the paper is organized as follows. In Section 2, some preliminaries on algebraic graph theory and model formulation are given. Sufficient conditions are given to ensure consensus of first-order multi-agent systems in Section 3. In Section 4, we give a numerical example to illustrate the proposed protocol. Conclusions are drawn in Section 5.
Throughout the paper, the following notations are adopted for the ease of presentation. is the n-dimensional Euclidean space and stands for the set of real matrix. and are identity and zero matrices, respectively. denotes the diagonal matrix with diagonal elements to . refers to the Euclidean vector norm and the induced matrix norm.
2. Preliminaries and Problem Statement
A weighted digraph (or directed graph) of order n consists of a set of nodes , a set of edges and a weighted adjacency matrix . A directed edge in is denoted by , which means node i has access to the information of j. The element in is decided by the edge between i and j, i.e., ; otherwise . The set of neighbors of node i is denoted by . The Laplacian matrix L of graph G is defined by , where , and is the in-degree of node i. A sequence of edges is called a directed path from node to node . If there exists at least one node (called the root) having directed path to any other nodes, the digraph is said to have a spanning tree.
To depict the varying topologies, let denote the collection of all possible digraphs on the same node set , and be the index set of possible topologies, where M is the number of possible topologies. Then, the underlying graph at time t can be denoted by , where is a piecewise constant switching function defined as . It is assumed that switches finite times in any bounded time interval. For a collection of digraphs, its union digraph is defined as . Moreover, we say that the collection jointly contains a spanning tree if its union digraph has a spanning tree.
Consider a multi-agent system consisting of n agents. The dynamics of each agent is
where is the state of agent i, is a nonlinear function describing the self-dynamics of agent i, and is the control input.
Assumption 1.
The nonlinear function satisfies the Lipschitz condition with the Lipschitz constant ρ, i.e.,
Assumption 2.
The switching topologies jointly contain a spanning tree.
Hence, the closed-loop system can be rewritten in compact form as
where and .
Here, we introduce a state transformation for system Equation (3)
where so that system Equation (3) can be rewritten in the following reduced-order form with respect to ξ
where , and .
Definition 1.
The consensus error is uniformly ultimately bounded (UUB) if there exists a bound B and a time , which are independent of , such that .
Remark 1.
From the structure of transformation matrix E, we know that ξ is the indicator of the consensus performance of multi-agent system Equation (1). That is, the system Equation (1) achieves consensus if and only if of Equation (4) is asymptotically stable. In what follows, ξ is called the consensus error of the system. When is UUB, is bounded within a bounded neighborhood of for and . Thus, this depicts an intuitive notion of “close enough" consensus.
Lemma 1.
[22] Let be the Laplacian matrices associated with the digraphs , respectively, then is Hurwitz stable if and only if the union of digraph of these graphs contains a spanning tree.
Lemma 2.
[36] For any two real vectors and positive definite matrix , we have
3. Main Results
In this section, we first design a stabilizing switching law for multi-agent system Equation (1). Then, the main result of this paper will be presented with the help of the above preliminary knowledge.
3.1. Switching Law Design
Define average matrix
and is Hurwitz. As a result, the following Lyapunov equation
has a positive definite solution Q.
Define auxiliary matrices as follows:
For initial state , let
where stands for the index which reaches the maximum among . If there is more than one index, we choose the minimum index.
Then, we define the switching instant and index sequences recursively by
where
Lemma 3.
The switching signal is well-defined, i.e., .
Proof.
Assume and are two consecutive switching time instants. By the property of the protocol that we design the switching instants, we have
- (1)
- (2)
- (3)
As , item (1) also implies that
- (4)
Firstly, let us consider the case
Here, we define an auxiliary function
It follows from (2) and (4) that
Calculating the derivative of along time, we get
Now, we denote
and
Combining with (3) yields
which together with the fact that implies that
thus
Next, suppose that Equation (8) does not hold, which means that there is a satisfying
Based on the property of exponential function and norm, there is a positive number such that
Suppose that
Combining the above discussions shows that for any consecutive switching time instants and , we have
which imposes a lower bound for the dwell time of switching signal. This means the switching signals are well-defined. ☐
Remark 2.
According to [35], a “good” switching signal should guarantee a positive dwell time and avoid fast switching. In the switching law Equation (6) and Equation (7), we fix a threshold value ϖ for switching, which can prevent the switching signal from chattering. However, there is a trade-off between the precise of consensus and frequency of switching due to such a threshold value. Specifically, a smaller ϖ may lead to a smaller dwell time, which implies high frequency switching, while a larger ϖ may bring about a larger consensus error which is undesirable. Similarly , there is also a trade-off between the control gain and frequency of switching due to parameters in Equation (6) and Equation (7). Specifically, smaller may result in larger control gain, which can be seen in the upcoming Theorem 1, while larger may bring about high frequency switching. The existence of these two trade-offs suggests that the choice of these parameters should achieve a balanced interplay between consensus performance and feasibility of control protocols.
3.2. Consensus Analysis
Theorem 1.
Consider the multi-agent system Equation (1) under Assumptions 1 and 2. Adopt the designed switching law in Equation (6) and Equation (7). Then, by employing control protocol Equation (2) and selecting control gain such that
where denotes the maximum eigenvalue of Q and , the consensus error is UUB. That is, all agents reach consensus with a bounded error ϖ.
Proof.
As the switching topologies jointly contain a spanning tree, is Hurwitz stable by Lemma 1, and the switching law is well-defined in Equation (6) and Equation (7). Here, we consider the Lyapunov function candidate as . In case of , by calculating the derivative of along the trajectory of system Equation (4), we have
Therefore, is strictly decreasing during each time interval. This, together with the fact that is continuous, implies the consensus error satisfies , which means the consensus error is UUB. This completes the proof. ☐
Remark 3.
In [21], first-order nonlinear multi-agent system was investigated, where general algebraic connectivity needs to be calculated to design the control parameter. However, the general algebraic connectivity of a graph is not easy to obtain, especially when the network size is large. Here, we provide a novel method to design the control parameter to realize consensus. In addition, we allow the underlying topology to be disconnected all the time, which cannot be analyzed by the technique in [21].
Remark 4.
In [18,22,23], consensus problems of multi-agent systems with nonlinear dynamics under switching topologies were considered. However, a common assumption of these works on the switching topologies is all the topologies are required to be connected or having a spanning tree. In [17], this assumption is relaxed where consensus of multi-agent systems was achieved without requiring the topology having a spanning tree all the time. However, these results are quite conservative in the sense that the underlying topology of the system switches without concerning the current states of the multi-agent systems. In this paper, another perspective to solve the consensus problem without requiring each possible topology containing a spanning tree is provided. The designed topology switching law arranges the underlying topology by taking states of agents into consideration, which is efficient.
Remark 5.
When the consensus of the systems is achieved, the state of agents in the system is determined by the nonlinear function. Therefore, denoting the consensus state of the system by (i.e., the trajectory of ), which can be any desired state: an equilibrium point, a nontrivial periodic orbit, or even a chaotic orbit in some applications.
4. Numerical Simulations
In this section, we present numerical simulations to demonstrate the effectiveness of theoretical results. For simplicity, we only consider the multi-agent systems consisting of ten agents labeled 1 through 10 and assume all weights of edges between agents are 0 or 1.
Consider the consensus of multi-agent system Equation (1) with the communication topology switching in a collection , as shown in Figure 1. Note that each digraph in Figure 1 does not contain a spanning tree, but the union digraph of them contains a spanning tree. The inherent nonlinear dynamics is given as . By Theorem 1, when the feedback gain , the consensus of the system is achieved uniformly ultimately bounded under the designed state-controlled switching topologies. Figure 2 shows the states of the closed-loop system with and . We can see that the ten agents achieve convergence with bounded error although none of digraph contains a spanning tree. Figure 3 and Figure 4 present the switching signal and the consensus error , respectively.
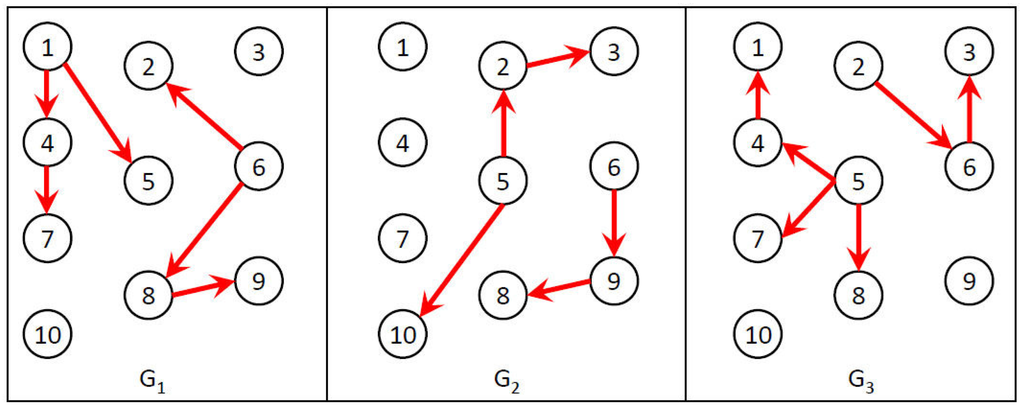
Figure 1.
Possible interaction topologies between agents.
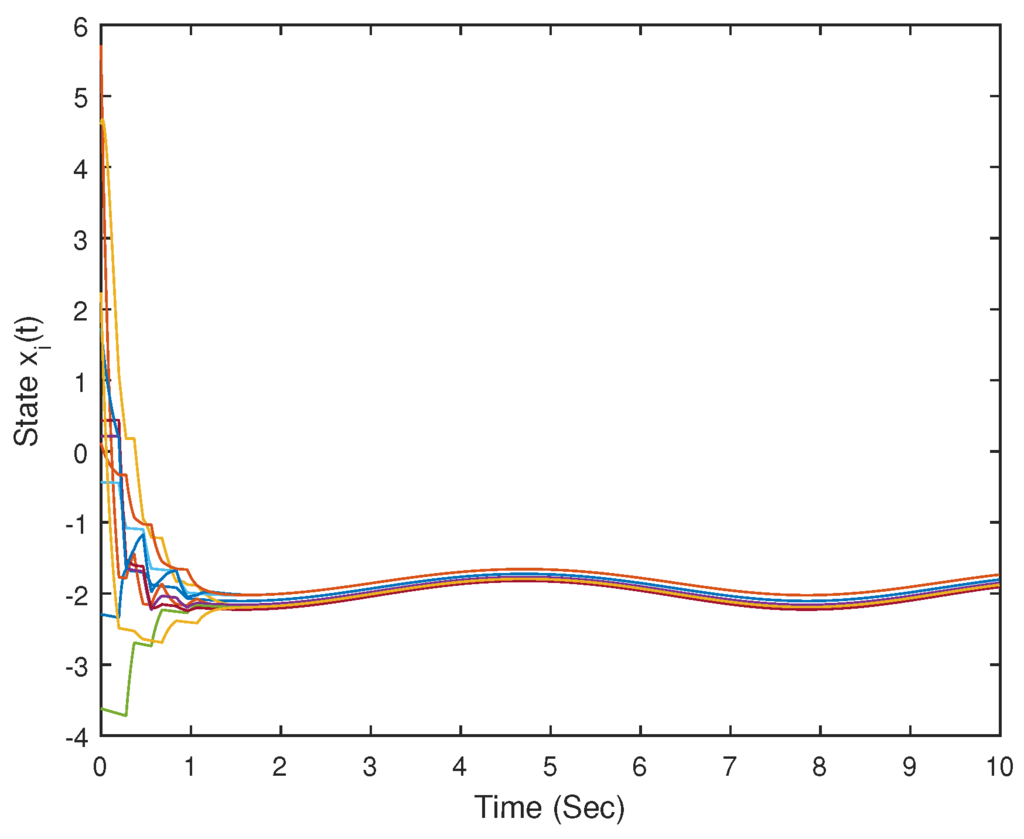
Figure 2.
State under the state-controlled switching topologies with a threshold .
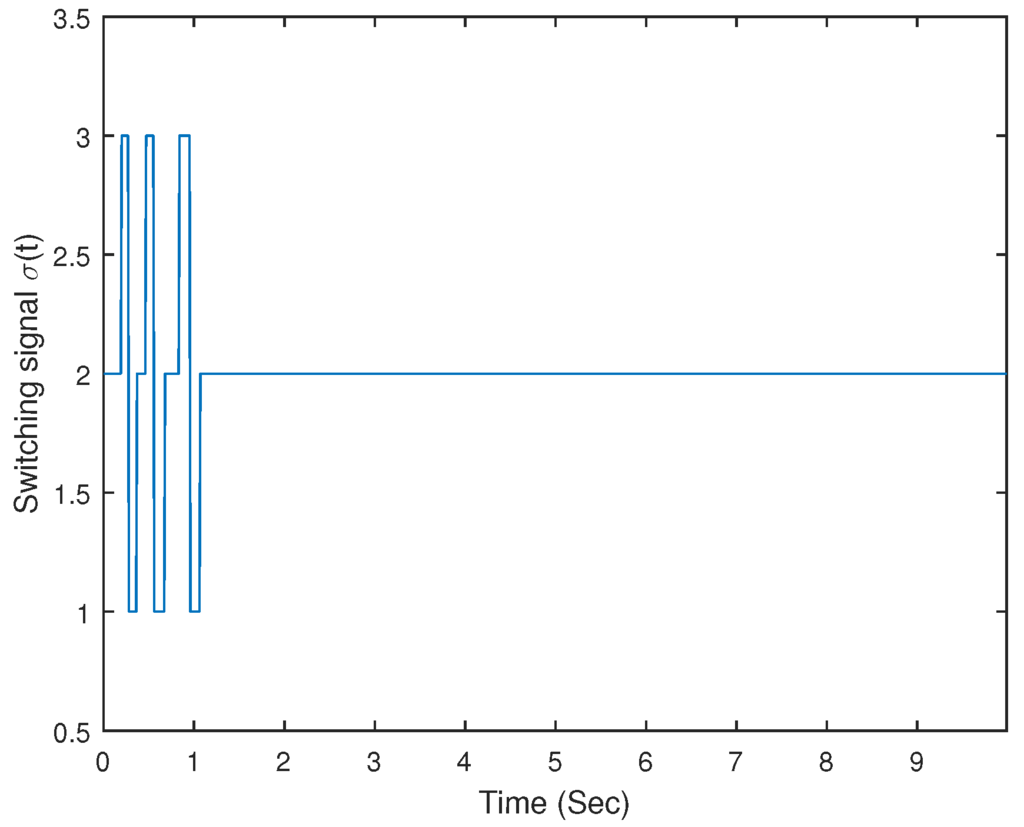
Figure 3.
The state-controlled switching signal with a threshold .
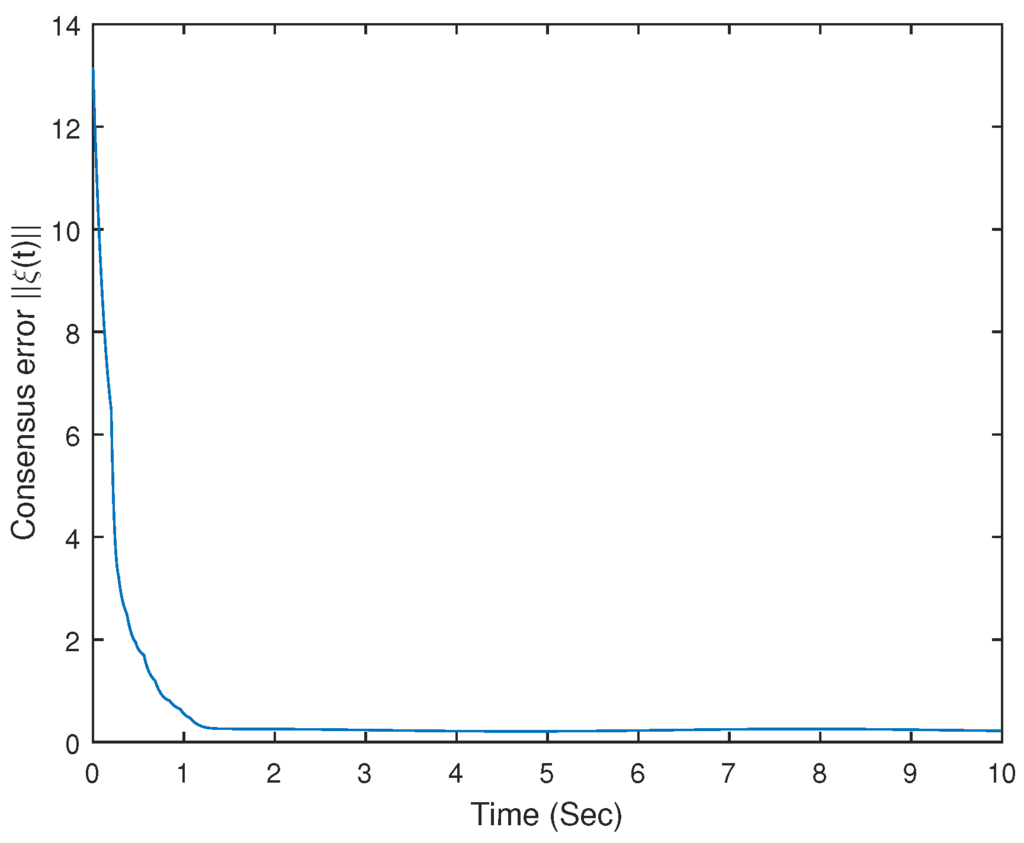
Figure 4.
Consensus error under the state-controlled switching topologies with a threshold .
To demonstrate the merit of fixing a threshold for switching, we also consider the case that under the same setting as stated above. The states of agents, switching signal and consensus error are shown in Figure 5, Figure 6 and Figure 7, respectively. From this comparison simulation, we can find that the multi-agent system reaches consensus precisely, while the interaction topology switches much more times than the case with .
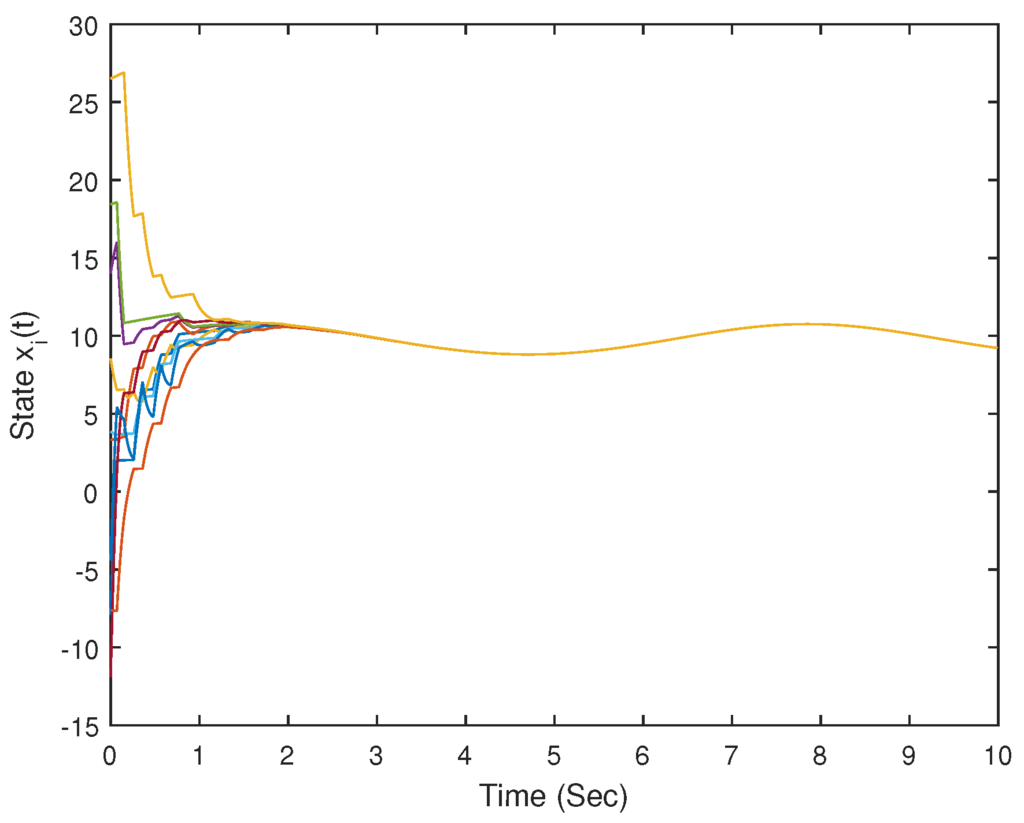
Figure 5.
State under the state-controlled switching topologies without a threshold.
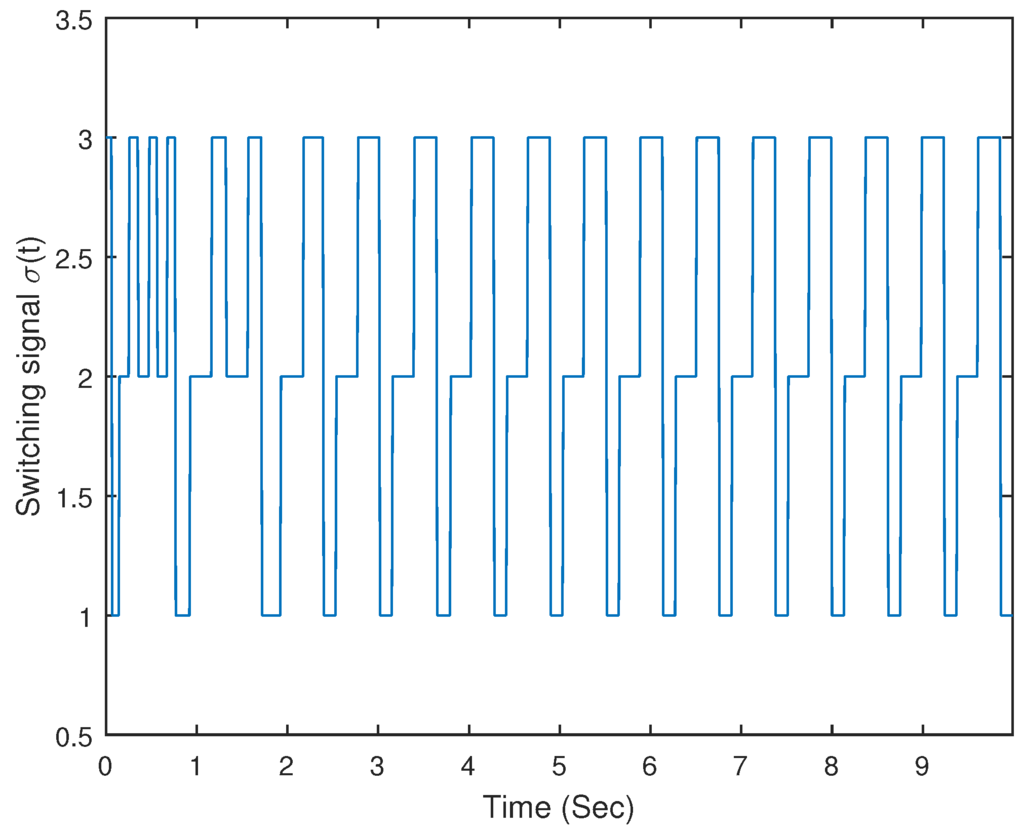
Figure 6.
The state-controlled switching signal without a threshold.
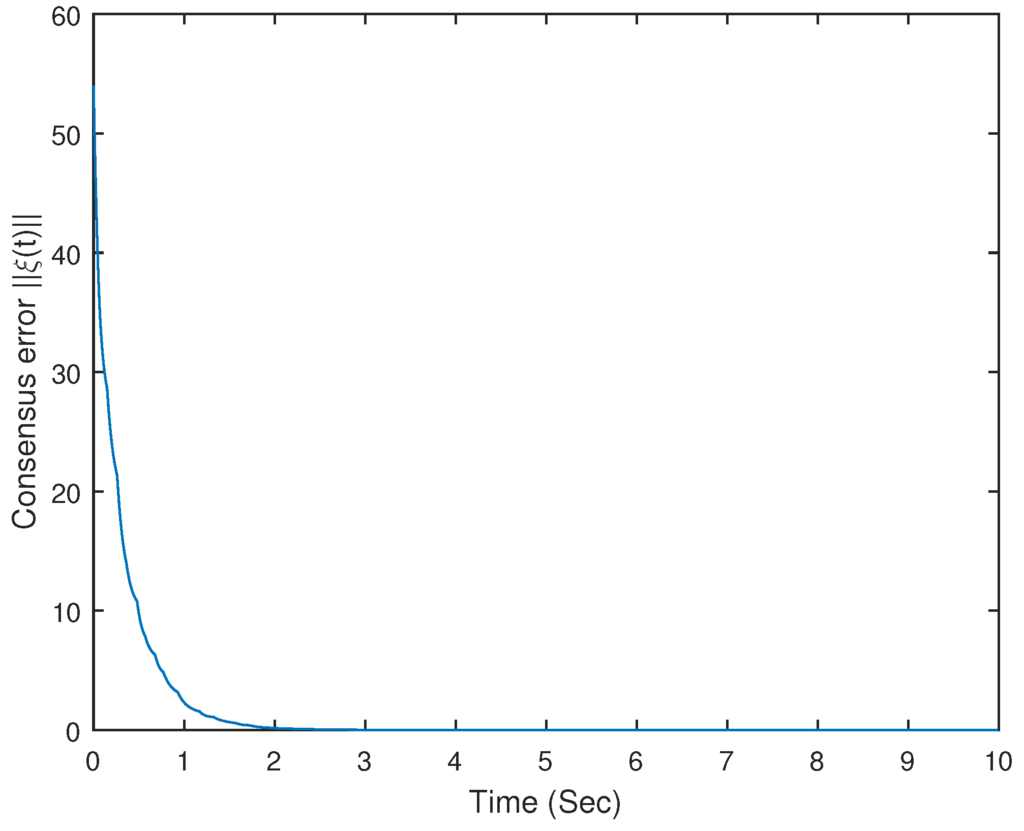
Figure 7.
Consensus error under the state-controlled switching topologies without a threshold.
5. Conclusions
In this paper, we have investigated the leaderless consensus problem with two practical constraints: (i) The system includes intrinsic nonlinear dynamics; (ii) The switching topology may not contain a spanning tree at any time. We introduced a variable transformation to facilitate the consensus analysis, which shows great potential in solving the considered consensus problem. By designing a state-controlled switching law, the consensus problem has been solved under the assumption that the switching topologies jointly contain a spanning tree. The choice of parameters in the switching law allows us to balance the consensus performance with the feasibility of control protocols. Nevertheless, the nonlinearities in this work are assumed to be Lipschitz-type, which bring about some conservations. In addition, another drawback of this work is that some global information is used in the designed switching law. We believe that the results of this paper could be largely improved if general nonlinearities are considered and the topology switching law depends only on local information, which is still an open issue and will be the object of our future work.
Acknowledgments
This work was partially supported by the National Natural Science Foundation of China (U1501251, 61573108), the Training Program for Outstanding Young Teachers in University of Guangdong Province (Yq2013065), the China Postdoctoral Science Foundation (2013M540648), and the Scientific Research Project of Guangdong University of Foreign Studies (15T1).
Author Contributions
Kairui Chen, Junwei Wang and Yun Zhang designed research; Kairui Chen conducted the simulation and analyzed the data; Kairui Chen and Junwei Wang performed research and wrote the paper. All authors have read and approved the final manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Olfati-Saber, R.; Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Moreau, L. Stability of multiagent systems with timedependent communication links. IEEE Trans. Autom. Control 2005, 50, 169–182. [Google Scholar] [CrossRef]
- Cao, M.; Morse, A.S.; Anderson, B.D. Reaching a consensus in a dynamically changing environment: A graphical approach. SIAM J. Control Optim. 2008, 47, 575–600. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, L. Consensus of multi-agent systems in directed networks with nonuniform time-varying delays. IEEE Trans. Autom. Control 2009, 54, 1607–1613. [Google Scholar]
- Proskurnikov, A.V. Average consensus in networks with nonlinearly delayed couplings and switching topology. Automatica 2013, 49, 2928–2932. [Google Scholar] [CrossRef]
- Wang, J.; Chen, K.; Ma, Q. Adaptive leader-following consensus of multi-agent systems with unknown nonlinear dynamics. Entropy 2014, 16, 5020–5031. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Y. Consensus analysis of heterogeneous multi-agent systems with time-varying delay. Entropy 2015, 17, 3631–3644. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems. Automatica 2010, 46, 1089–1095. [Google Scholar] [CrossRef]
- Liu, C.; Liu, F. Delayed-compensation algorithm for second-order leader-following consensus seeking under communication delay. Entropy 2015, 17, 3752–3765. [Google Scholar] [CrossRef]
- Hou, Z.; Cheng, L.; Tan, M. Decentralized robust adaptive control for the multiagent system consensus problem using neural networks. IEEE Trans. Syst. Man Cybern. 2009, 39, 636–647. [Google Scholar]
- Peng, Z.; Wang, D.; Zhang, H.W.; Sun, G. Distributed neural network control for adaptive synchronization of uncertain dynamical multiagent systems. IEEE Trans. Neural Netw. 2014, 25, 1508–1519. [Google Scholar] [CrossRef] [PubMed]
- Shang, Y. Consensus of noisy multiagent systems with Markovian switching topologies and time-varying delays. Math. Probl. Eng. 2015, 2015, 453072. [Google Scholar] [CrossRef]
- Papachristodoulou, A.; Jadbabaie, A.; Munz, U. Effects of delay in multi-agent consensus and oscillator synchronization. IEEE Trans. Autom. Control 2010, 55, 1471–1477. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Q.; Wang, Y.; Yu, D. Quantized consensus on first-order integrator networks. Syst. Control Lett. 2012, 61, 1145–1150. [Google Scholar] [CrossRef]
- Yang, T.; Meng, Z.; Dimarogonas, D.V.; Johansson, K.H. Global consensus for discretetime multi-agent systems with input saturation constraints. Automatica 2014, 50, 499–506. [Google Scholar] [CrossRef]
- Shang, Y. Group pinning consensus under fixed and randomly switching topologies with acyclic partition. Netw. Heterogen. Media 2014, 9, 553–573. [Google Scholar] [CrossRef]
- Wen, G.; Yu, W.; Hu, G.; Cao, J.; Yu, X. Pinning synchronization of directed networks with switching topologies: A multiple Lyapunov functions approach. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 3239–3250. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Qu, Z. Distributed finite-time consensus of nonlinear systems under switching topologies. Automatica 2014, 50, 1626–1631. [Google Scholar] [CrossRef]
- Ren, W. Synchronization of coupled harmonic oscillators with local interaction. Automatica 2008, 44, 3195–3200. [Google Scholar] [CrossRef]
- Qin, J.; Gao, H.; Zheng, W. Second-order consensus for multi-agent systems with switching topology and communication delay. Syst. Control Lett. 2011, 60, 390–397. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M. Consensus in directed networks of agents with nonlinear dynamics. IEEE Trans. Autom. Control 2011, 56, 1436–1441. [Google Scholar] [CrossRef]
- Liu, K.; Xie, G.; Ren, W.; Wang, L. Consensus for multiagent systems with inherent nonlinear dynamics under directed topologies. Syst. Control Lett. 2013, 62, 152–162. [Google Scholar] [CrossRef]
- Liu, W.; Zhou, S.; Qi, Y.; Wu, X. Leaderless consensus of multi-agent systems with Lipschitz nonlinear dynamics and switching topologies. Neurocomputing 2016, 173, 1322–1329. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Vicsek, T.; Czirók, A.; Jacob, E.B.; Cohen, I.; Schochet, O. Novel type of phase transitions in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Hong, Y.; Gao, L.; Cheng, D.; Hu, J. Lyapunov-based approach to multiagent systems with switching jointly connected interconnection. IEEE Trans. Autom. Control 2007, 52, 943–948. [Google Scholar] [CrossRef]
- Shang, Y. Couple-group consensus of continuous-time multi-agent systems under Markovian switching topologies. J. Frankl. Inst. 2015, 352, 4826–4844. [Google Scholar] [CrossRef]
- Miao, G.; Xu, S.; Zou, Y. Necessary and sufficient conditions for mean square consensus under Markov switching topologies. Int. J. Syst. Sci. 2013, 44, 178–186. [Google Scholar] [CrossRef]
- Shang, Y. Consensus seeking over Markovian switching networks with time-varying delays and uncertain topologies. Appl. Math. Comput. 2016, 273, 1234–1245. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y. Consensus of a class of second-order multiagent systems with time-delay and jointly-connected topologies. IEEE Trans. Autom. Control 2010, 55, 778–784. [Google Scholar]
- Lin, P.; Jia, Y. Multi-agent consensus with diverse time-delays and jointly-connected topologies. Automatica 2011, 47, 848–856. [Google Scholar] [CrossRef]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Zhu, W. Consensus of multiagent systems with switching jointly reachable interconnection and time delays. IEEE Trans. Syst. Man Cybern. 2012, 42, 348–358. [Google Scholar] [CrossRef]
- Sun, Z. Switched Linear Systems: Control and Design; Springer: London, UK, 2006. [Google Scholar]
- Wu, C. Synchronization in arrays of coupled nonlinear systems with delay and nonreciprocal time-varying coupling. IEEE Trans. Circuits Syst. II 2005, 52, 282–286. [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).