Design and Performance Evaluation of a Low-Cost Autonomous Sensor Interface for a Smart IoT-Based Irrigation Monitoring and Control System



Abstract
1. Introduction and Related Works
1.1. Introduction
- A low-cost autonomous sensor interface is proposed to determine whether watering is required for plants, based on the information obtained from the monitoring and control of the soil water content.
- A monitoring and control system (implemented prototype) that supplies the amounts of water, required by plants to avoid drying, is designed.
- The system should stop the water supply when the required amount has been supplied to plants.
- A convenient sensor-based interface architecture and web portal are provided so that the user can monitor the system remotely.
1.2. Related Works
2. Autonomous Sensor Interface System Architecture and Design
2.1. Autonomous System
- Self-Configuration: This is the ability of the autonomous system to adapt dynamically to environmental and situational changes, based on pre-defined protocols, and principles that govern the operating environment. Self-configuration provides continuous signal strength in sensing environmental parameters and enhances sensor-node productivity. This will provide scalability and flexibility in the sensor network interface.
- Self-Healing: This feature provides the means of autonomous discovery and fault detection. It provides the ability to discover, diagnose, and respond to unpredicted situational changes that may occur in a dynamic environment. Self-healing detects sensor component failure and initiates a repair technique without affecting system workability. The system repairing mechanisms makes it resilient against errors and faults.
- Self-Optimization: This feature provides autonomous monitoring and control to facilitate the fair and optimal use of limited resources. Self-optimizing sensor components possess capabilities of controlling themselves to attain the stated goals and objectives in a given environment. The optimization techniques are the reallocation and rescheduling of resources caused by arising changes in the dynamic environment, to enhance the overall sensor network utilization, real-time transmission, and retransmission of sensor data.
- Self-Protection: This feature provides the capabilities of anticipating, identifying, and providing mechanisms for protection against threats and various kinds of attacks in autonomous systems. This feature enables the autonomous system to detect malicious and suspicious behavior within the system and take reactive measures to counterattack them and make the system less vulnerable to threats. Furthermore, this feature provides security measures and policies to protect components and the entire system against all internal or external threats and vulnerability attacks.
2.2. Autonomous Sensor Interface System Architecture
2.3. Real-Time System Monitoring and Control
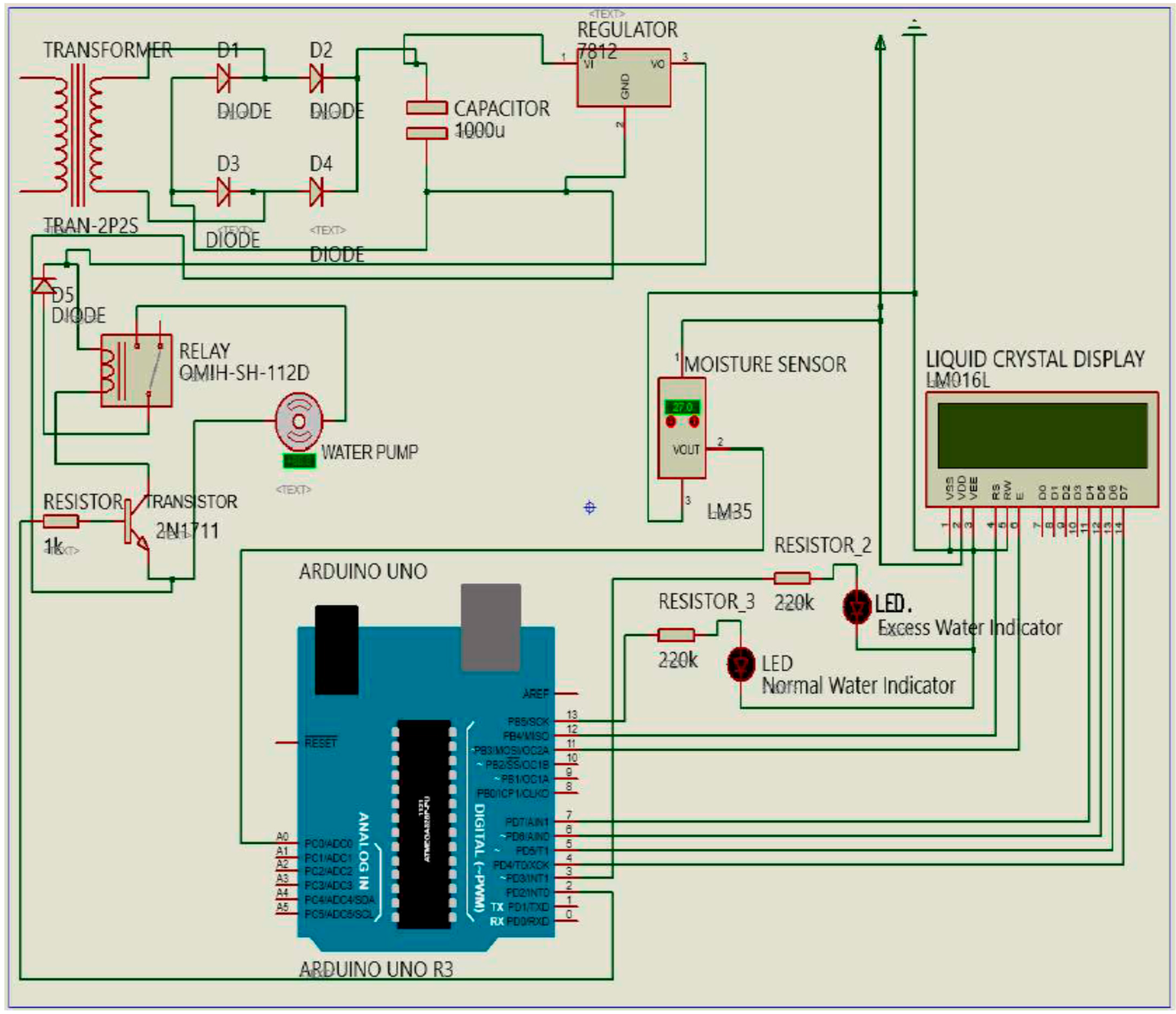
2.4. System Modeling and Simulation
2.5. The Moisture Sensor Calibration
| Algorithm 1: Soil moisture sensor calibration process. |
| 1: // Algorithm to Calibrate the moisture sensor during the first five seconds. 2: // Set the initial values for the minimum and maximum values of the moisture sensor. 3: int MoistureMin ← 400; // The minimum moisture sensor value. 4: int MoistureMax ← 100; // The maximum moisture sensor value. 5: while (millisecond () < 5000) 6: { 7: MoistureValue ← analogRead (MoisturePin) 8: // Record the maximum sensor value 9: if (MoistureValue > MoistureMax) 10: { 11: MoistureMax ← MoistureValue 12: } 13: // Record the minimum sensor value 14: if (MoistureValue < MoistureMin) 15: { 16: MoistureMin ← MoistureValue 17: } 18: } 19: MoistureValue ← map (MoistureValue, MoistureMin, MoistureMax, 100, 400); |
2.6. The Soil Moisture Sensor
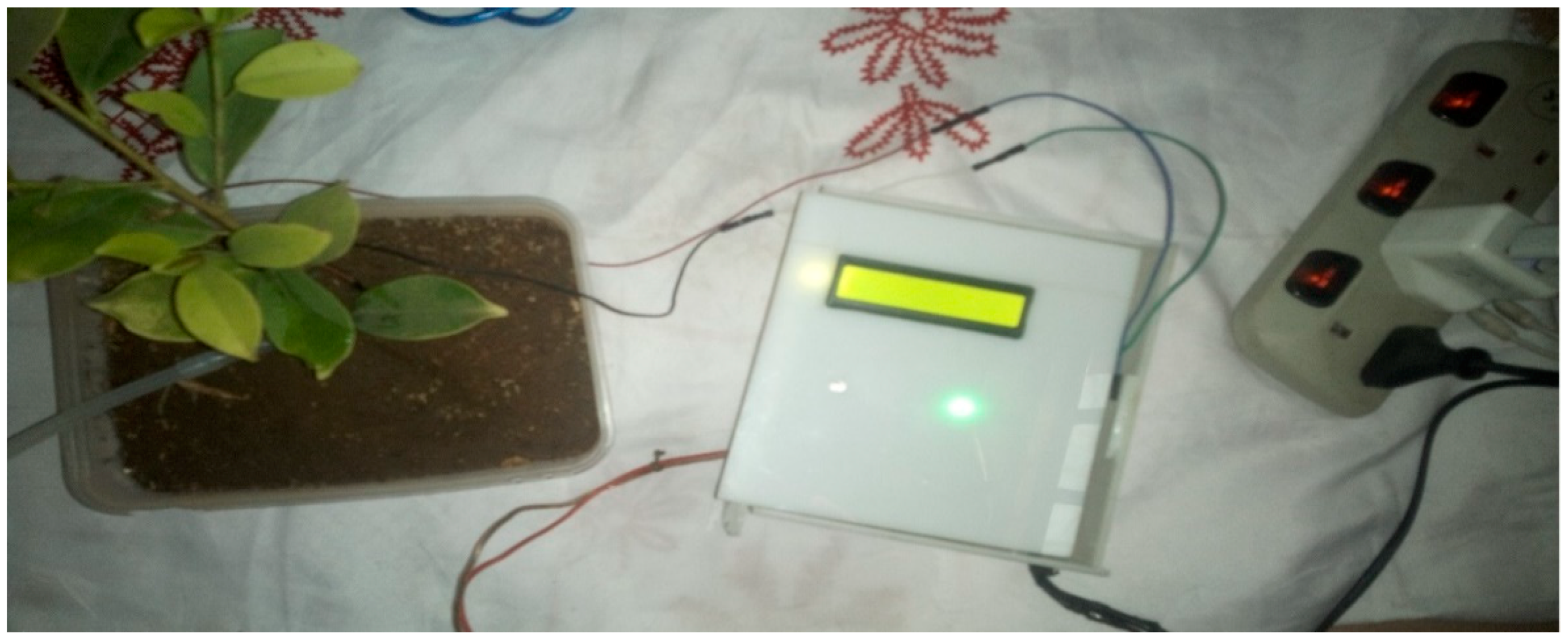
3. System Implementation
4. Experimental Results and Discussion
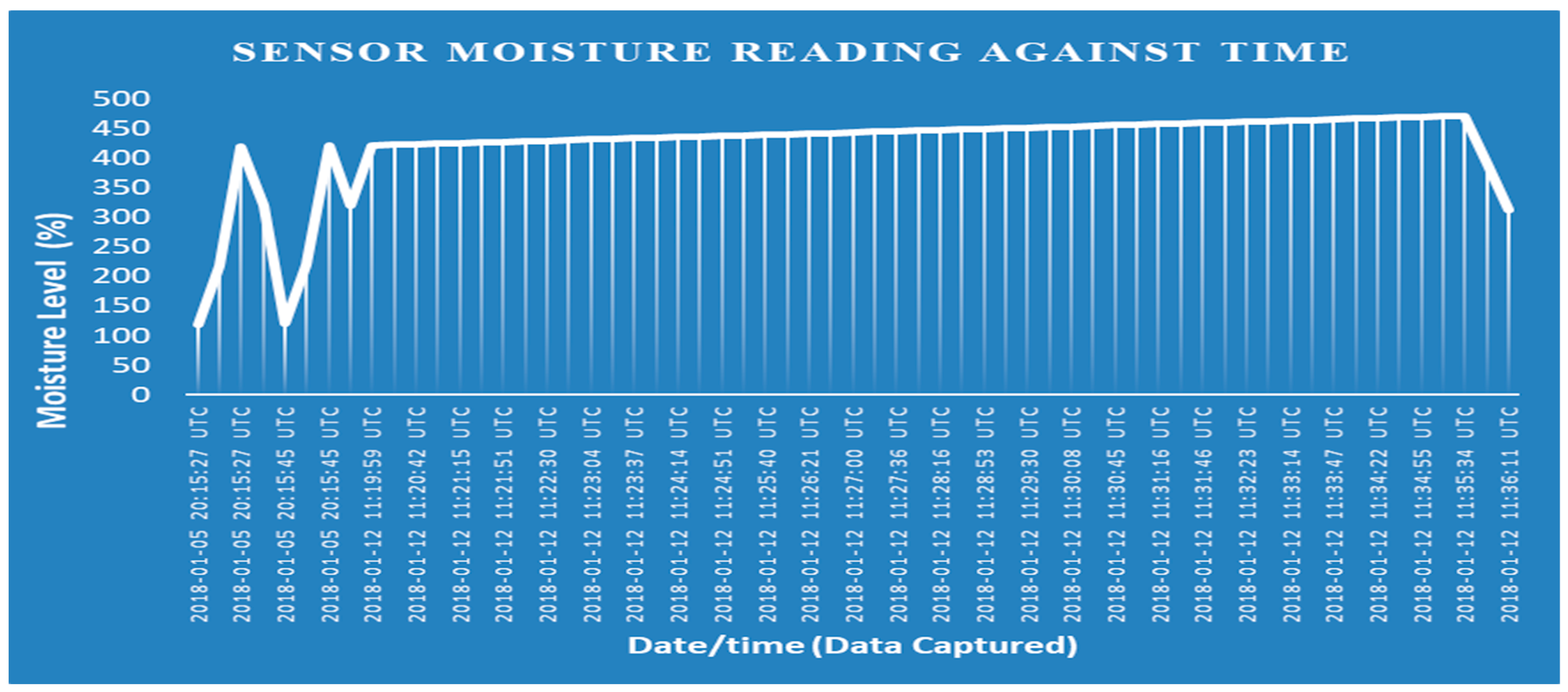
4.1. Sensor Data Logging
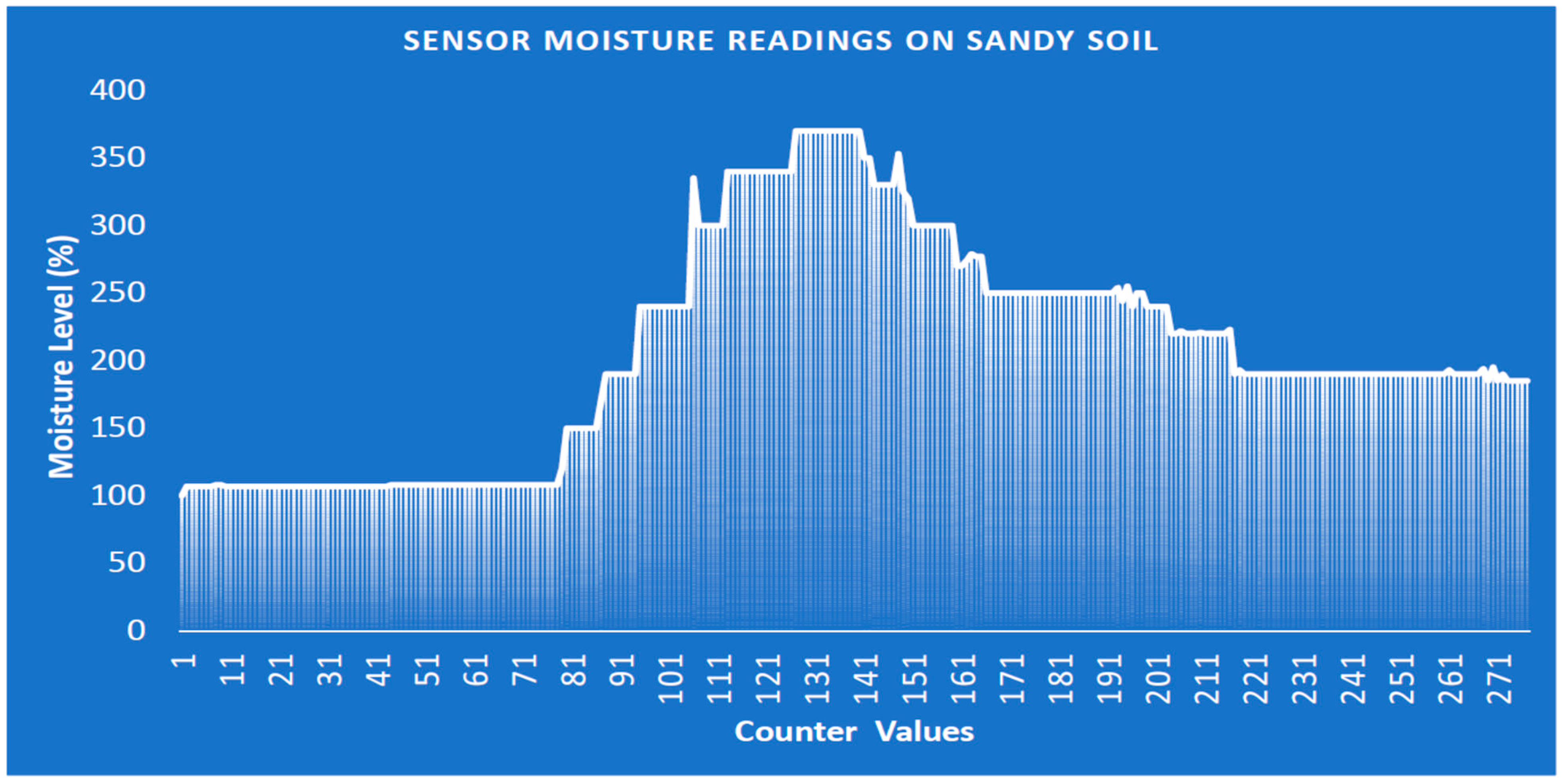
4.2. Performance Evaluation on Loamy and Sandy Soils
4.3. Cost Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Imran, A.L.; Gao, J.; Tabinda, N.S.; Farman, A.C.; Noman, A.B.; Waqar, A.Q. Monitoring and Control Systems in Agriculture Using Intelligent Sensor Techniques: A Review of the Aeroponic System. J. Sens. 2018, 18, 8672769. [Google Scholar]
- Bégué, A.; Arvor, D.; Bellon, B.; Betbeder, J.; De Abelleyra, D.; Ferraz, R.P.D.; Lebourgeois, V.; Lelong, C.; Simões, M.; Verón, S.R. Remote Sensing and Cropping Practices: A Review. Remote Sens. 2018, 10, 99. [Google Scholar] [CrossRef]
- Jirapond, M.; Nathaphon, B.; Siriwan, K.; Narongsak, L.; Apirat, W.; Pichetwut, N. IoT and agriculture data analysis for smart farm. Comput. Electron. Agric. 2019, 156, 467–474. [Google Scholar]
- Zhang, X.; Zhang, J.; Lin, L.; Zhang, Y.; Yang, G. Monitoring Citrus Soil Moisture and Nutrients Using an IoT Based System. Sensors 2017, 17, 447. [Google Scholar] [CrossRef] [PubMed]
- Da Costa, E.; De Oliveira, N.; Morais, F.; Carvalhaes-Dias, P.; Duarte, L.; Cabot, A.; Siqueira Dias, J. A Self-Powered and Autonomous Fringing Field Capacitive Sensor Integrated into a Micro Sprinkler Spinner to Measure Soil Water Content. Sensors 2017, 17, 575. [Google Scholar] [CrossRef] [PubMed]
- Yogesh, G.G.; Devendra, S.C.; Hitendra, C.C. A Review on Automated Irrigation System Using Wireless Sensor Network. Int. J. Adv. Res. Electron. Commun. Eng. 2016, 5, 1725–1731. [Google Scholar]
- Sumeet, S.; Sandhya, U.; Piyali, S.; Yatin, J. Arduino Based Automated Watering System. IJIRT 2015, 2, 419–420. [Google Scholar]
- Sumeet, S.B.; Manoj, A.M. IoT Based Automated Irrigation System. Int. J. Mod. Trends Eng. Res. 2015, 2, 1532–1538. [Google Scholar]
- Marie, F.L. Design of an Automated Irrigation System: Student Paper Competition; McGill University: Montreal, QC, Canada, 16 May 2005. [Google Scholar]
- Deweshvree, R.; Indurkar, P.R.; Khatri, D.M. Review Paper Based on Automatic Irrigation System Based on RF Module. IJAICT 2015, 1, 736–738. [Google Scholar]
- Raheela, S.; Muhammad, T.; Javed, F.; Muhammad, A.S. Internet of Things based Expert System for Smart Agriculture. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 341–350. [Google Scholar]
- Gabriel, V.; Juan, F.D.P.; Daniel, H.; De La Iglesia, D.H.; Javier, B. Combining Multi-Agent Systems and Wireless Sensor Networks for Monitoring Crop Irrigation. Sensors 2017, 17, 1775. [Google Scholar]
- Prem, P.J.; Ali, Y.; Dimitrios, G.; Ahsan, M.; Arkady, Z. Internet of Things Platform for Smart Farming: Experiences and Lessons Learnt. Sensors 2016, 16, 1884. [Google Scholar]
- Chandan, K.S.; Pramitee, B. A Low-Cost Smart Irrigation Control System. In Proceedings of the International Conference on Electronics and Communication System, Coimbatore, India, 26–27 February 2015; pp. 1146–1152. [Google Scholar]
- Karthikeswari, M.; Mithraderi, P. Automated Irrigation System in Agriculture Using Wireless Sensor Technology. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 13622–13627. [Google Scholar]
- Purnima, S.R.; Reddy, N. Design of a remote monitoring and control System with Automatic Irrigation System Using GSM Bluetooth. Int. J. Comput. Appl. 2012, 47, 6–13. [Google Scholar] [CrossRef][Green Version]
- Archana, P.; Priya, R. Design and implementation of automatic plant watering system. Int. J. Adv. Eng. Glob. Technol. 2016, 4, 1567–1570. [Google Scholar]
- Ferrarezi, R.S.; Dove, S.K.; Van Iersel, M.W. An automated system for monitoring soil moisture and controlling irrigation using low-cost open-source microcontrollers. HortTechnology 2015, 25, 110–118. [Google Scholar] [CrossRef]
- Bavel, C.H.V.; Bavel, M.G.V.; Lascano, R.J.; Camp, C.R. Automatic Irrigation Based on Monitoring Plant Transpiration. Available online: http://dynamax.com/images/uploads/papers/61_Automatic_Irrigation_Based.pdf (accessed on 3 January 2019).
- Rocha, N.O.; Teixeira, A.; Leão, R.; Moreira, L.; Galvão, L. Hyperspectral Remote Sensing for Detecting Soil Salinization Using ProSpecTIR-VS Aerial Imagery and Sensor Simulation. Remote Sens. 2017, 9, 42. [Google Scholar] [CrossRef]
- Durga, G.; Ifat, J.; Goutam, K. High Temperature AlGaN/GaN Membrane Based Pressure Sensors. Micromachine 2018, 9, 207. [Google Scholar]
- Abba, S.; Lee, J.A. An Autonomous Self-Aware and Adaptive Fault-Tolerant Routing Technique for Wireless Sensor Networks. Sensors 2015, 15, 20316–20354. [Google Scholar] [CrossRef] [PubMed]
- Kephart, J.O.; Chess, D.M. The Vision of Autonomic Computing. Computer 2003, 36, 41–50. [Google Scholar] [CrossRef]
- Arduino Integrated Design Environment. Available online: http://www.arduino.cc (accessed on 8 February 2018).
- Labcenter Electronics Ltd. Proteus Design Suite 8.5 Professional. Available online: http://www.labcenter.com (accessed on 10 February 2018).
- Abba, S.; Lee, J.A. FPGA-Based Design of an Intelligent On-Chip Sensor Network Monitoring and Control Using Dynamically Reconfigurable Autonomous Sensor Agents. Int. J. Distrib. Sens. Netw. 2016, 29, 4246596. [Google Scholar] [CrossRef]
- Understand Your Thing. The Open IoT Platform with Matlab Analytics. Available online: http://www.thingspeak.com (accessed on 6 February 2018).
- Sani, A.; Beauty, P.E. Smart Framework for Environmental Pollution Monitoring and Control System Using IoT-Based Technology. Sens. Transducers 2019, 229, 84–93. [Google Scholar]
- Bill, E. Calibrating Sensors, Adafruit Learning System. Available online: http://learn.adafruit.com/calibrating-sensors (accessed on 15 March 2018).
- Arduino Reference. Available online: https://www.arduino.cc/en/Reference/Map (accessed on 15 March 2018).
- Electronic Hub. Available online: https://www.electronicshub.org/interfacing-soil-moisture-sensor-with-arduino/ (accessed on 1 January 2019).
- Available online: https://en.wikipedia.org/wiki/Soil_moisture_sensor (accessed on 5 July 2019).
- Jim, B. Soil Water Status: Content and Potential; App. Note: 2S-I; Campbell Scientific, Inc.: Logan, UT, USA, 2001. [Google Scholar]
- Marek, B.; Piotr, B.; Anetta, D.; Piotr, M. Evaluation of Low-Cost Sensors for Ambient PM2.5 Monitoring. J. Sens. 2018, 2018, 5096540. [Google Scholar]
- ePro Labs. Available online: https://wiki.eprolabs.com/index.php?title=Moisture_Sensor (accessed on 5 July 2019).
- Available online: https://www.Amazon.com (accessed on 2 January 2019).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S/No. | Item Description | Unit Quantity | Unit Price (U.S. Dollar) | Amount (U.S. Dollar) |
|---|---|---|---|---|
| 1. | Arduino Uno Board | 1 | 12.3445 | 12.3445 |
| 2. | Generic EPS-01 ESP8266 2.4-GHz WiFi Module for Arduino | 1 | 9.25134 | 9.25134 |
| 3. | 16 × 2 LCD Blue Screen Microcontroller Development Support for Arduino | 1 | 3.38097 | 3.38097 |
| 4. | LM393 Soil Moisture Sensor | 1 | 2.20438 | 2.20438 |
| 5. | Electrolytic capacitor (20 pcs) | 1 | 5.23540 | 5.23540 |
| 6. | Resistors 1 kΩ (50 pcs) | 1 | 6.88868 | 6.88868 |
| 7. | 12-V Relay Module External Trigger Delay Adjustable | 1 | 7.14219 | 7.14219 |
| 8. | Diodes 10 mn RGB LED Module Light Emitting Diode for Arduino | 3 | 2.22918 | 6.68754 |
| 9. | Generic PCs Water Pump High Quality DC 12 V 3.8 m, Magnetic Electrical Centrifugal Hotsel | 1 | 14.8327 | 14.8327 |
| 10. | Breadboard and Jumper Cables. | 1 | 4.13321 | 4.13321 |
| 11. | DHT 11 Digital Temperature, Humidity Sensor Module for Arduino | 1 | 1.29507 | 1.29507 |
| 12. | Generic AC 220 V to 12 V DC step down Power Supply Module for Arduino | 1 | 5.89671 | 5.89671 |
| Total | 14 | 74.83433 | 79.29263 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abba, S.; Wadumi Namkusong, J.; Lee, J.-A.; Liz Crespo, M. Design and Performance Evaluation of a Low-Cost Autonomous Sensor Interface for a Smart IoT-Based Irrigation Monitoring and Control System. Sensors 2019, 19, 3643. https://doi.org/10.3390/s19173643
Abba S, Wadumi Namkusong J, Lee J-A, Liz Crespo M. Design and Performance Evaluation of a Low-Cost Autonomous Sensor Interface for a Smart IoT-Based Irrigation Monitoring and Control System. Sensors. 2019; 19(17):3643. https://doi.org/10.3390/s19173643
Chicago/Turabian StyleAbba, Sani, Jonah Wadumi Namkusong, Jeong-A Lee, and Maria Liz Crespo. 2019. "Design and Performance Evaluation of a Low-Cost Autonomous Sensor Interface for a Smart IoT-Based Irrigation Monitoring and Control System" Sensors 19, no. 17: 3643. https://doi.org/10.3390/s19173643
APA StyleAbba, S., Wadumi Namkusong, J., Lee, J.-A., & Liz Crespo, M. (2019). Design and Performance Evaluation of a Low-Cost Autonomous Sensor Interface for a Smart IoT-Based Irrigation Monitoring and Control System. Sensors, 19(17), 3643. https://doi.org/10.3390/s19173643