Abstract
Arobotic system refers to a mechanized apparatus, often controllable remotely or programmable via a computer, that is capable of executing various tasks. These machines can be directed by an external control source. While some robots mimic human-like features, most are designed primarily for functionality rather than appearance. They encompass a wide range, from humanoid models like Honda’s Advanced Step in Innovative Mobility and TOSY’s Ping Pong Playing Robot to specialized industrial, medical, or assistance robots, such as those used in surgery. Over time, robotic capabilities have advanced significantly. Modern robots exhibit a broad range of movements and actions, mirroring many tasks performed by humans in daily life. However, despite these advancements, certain crucial operations, such as ladder climbing, which is essential for surveillance, security, and accessing elevated materials, remain challenging for current robotic systems. As part of our project dissertation, we aim to develop a specialized machine capable of climbing ladders. Our design incorporates mechanisms for lower-arm locking, upper-arm advancement and reverse, and upper-arm locking to facilitate this essential function.
1. Introduction
Robotics constitutes a multidisciplinary field merging electronics engineering, mechanical engineering, computer science, and other disciplines. Its scope encompasses the design, fabrication, and utilization of robots, along with sensory feedback and information processing. With advancements in technology, robotics is poised to replace various human activities in the foreseeable future. These versatile machines find applications in sensitive domains such as bomb detection and deactivation. Robots exhibit diverse forms, with some closely resembling humans. These humanoid robots aim to replicate human capabilities, including walking, speech, cognition, and other functions. Many contemporary robots draw inspiration from nature, giving rise to bio-inspired designs. These robots serve in hazardous environments, mitigating risks to human life. Robotics encompasses the conception, design, operation, and manufacturing of robots. Isaac Asimov, a notable author, is credited with coining the term “robotics” in a short story from the 1940s. In this narrative, Asimov introduced three guiding principles for the governance of robotic machines, which later became known as “Isaac’s Three Laws of Robotics”. These laws generally govern the operation of teleported robots, which are controlled remotely. Controlled robots, although they might contain some sort of Artificial Intelligence, normally they take their command from a human operator [1,2].The integration of a human operator into the control loop ensures that teleported robots execute commands precisely as instructed. In contemporary robotic technology, numerous telerobots have been developed. These advanced robots boast capabilities such as climbing staircases, fighting fires, performing medical surgeries, and carrying out military operations [3]. However, despite these accomplishments, ladder climbing remains a challenging task for robots [4]. In our dissertation project, we focused on addressing this deficiency by developing mechanisms specifically designed for ladder-climbing operations [5,6]. The manufacturing process involved the creation of several intricate components essential for the construction of ladder-climbing robot [7,8,9].
2. Methodology
2.1. Material Specifications and Major Equipment
| Drive Motors: |
| Type: DC Geared Motors |
| Capacity: 12 W |
| Speed: 30 rpm |
| Voltage: 12 V |
| Number of Motors: 5 |
| Base Plate: |
| Material: Mild Steel |
| Thickness: 2 mm |
| Size: 14 × 12 inches |
| Square Pipes: |
| Material: Mild Steel |
| Thickness: 2 mm |
| Size: 25 × 25 mm, 20 × 20 mm, 18 × 18 mm |
| Arm Flats: |
| Material: Mild Steel |
| Size: 12 × 3 mm |
| Thickness: 3 mm |
| Rack: |
| Material: Mild Steel |
| Size: 20 × 20 mm |
| Length: 3 feet |
| Tooth profile: 5 mm pitch |
| Pinion: |
| Material: Mild Steel |
| Width: 25 mm |
| Outer diameter: 40 mm |
| Inner diameter: 32 mm |
| Pitch: 5 mm |
2.2. Fabrication of Ladder-Climbing Robot
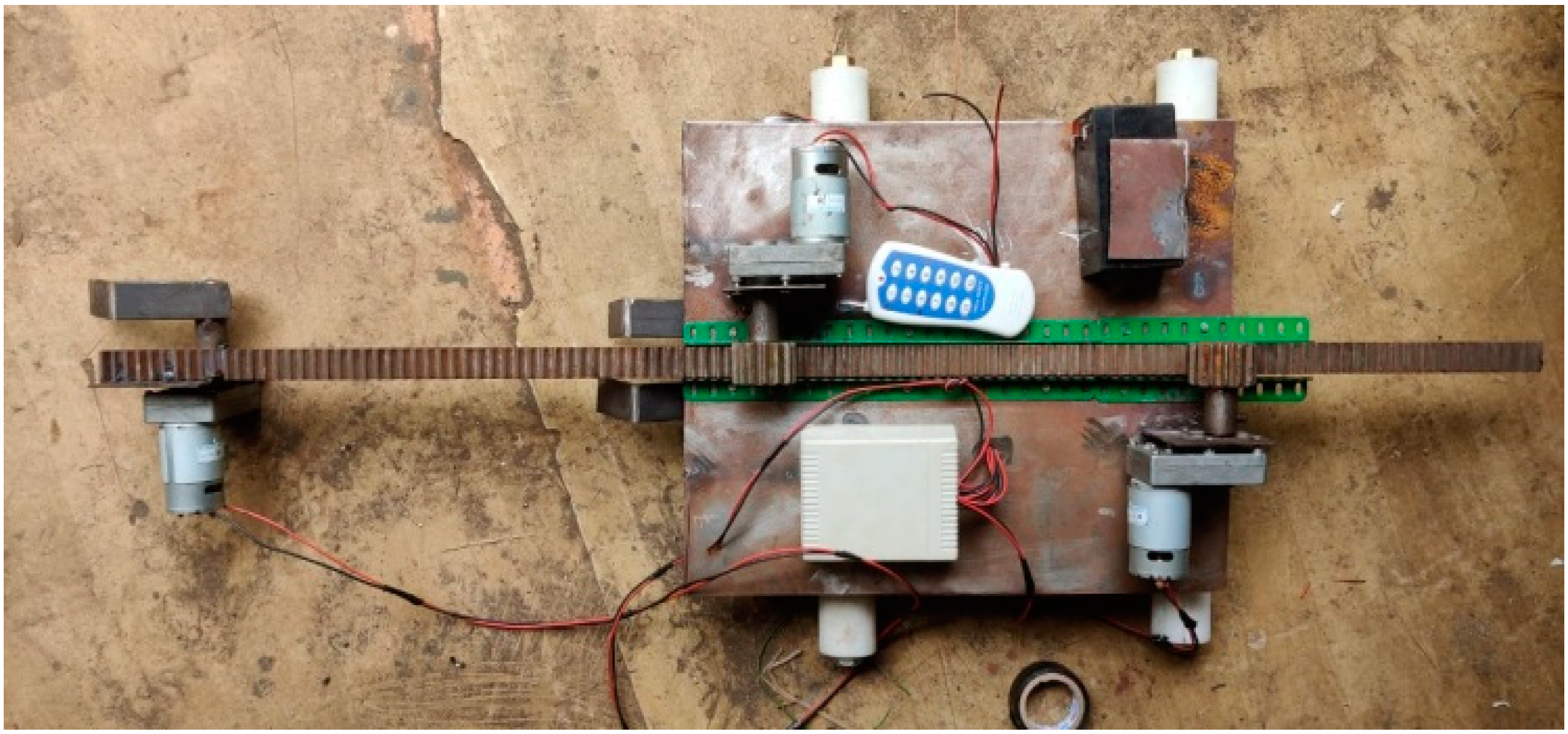
Robot assembly please see Figure 1.
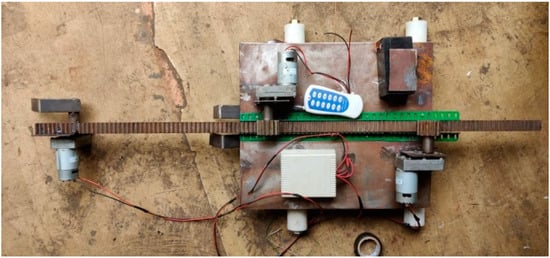
Figure 1.
Robot assembly [10].
3. Results
| For the motor mounted with the longer arm: |
| Mass (m) = 9 kg |
| Radius (r) = 65 mm = 0.065 m |
| Force (F) = m × g = 9 × 9.81 = 88.29 N |
| Torque (T) = F × r = 88.29 × 0.065 = 5.738 N-m |
| Power (P) = (2πNT)/60 = 6.008 watt |
| For the motor mounted with the shorter arm: |
| Mass (m) = 4 kg |
| Radius (r) = 55 mm = 0.055 m |
| Force (f) = m × g = 4 × 9.81 = 39.24 N-m |
| Torque (T) = F × r = 39.24 × 0.055 = 2.158 N-m |
| Power (P) = (2πNT)/60 = 2.259 watt |
| For the motor mounted with the pinion: |
| Mass (m) = 3 kg |
| Radius (r) = 0.020 m |
| Force (f) = m × g = 3 × 9.81 = 29.43 N |
| Torque (T) = F × r = 29.43 × 0.020 = 0.5886 N-m |
| Power (P) = (2πNT)/60 = 0.616 watt |
| Overall power required: |
| Power consumed by all motors (P) = P1 + P2 × 2 + P3 × 2 = 6.008 + (2.259) × 2 + (0.616) × 2 = 11.758 watt |
| Battery calculations: |
| Number of machines operated on a single battery = 5 |
| Overall motor power = 11.758 watt |
| Voltage of the battery = 12 V |
| Working hours of the battery = 1 h |
4. Conclusions
This robot boasts a simple and cost-effective design, making it easy to manufacture. It operates using a remote-control system that relies on radio waves, consisting of a transmitter and receiver. With a range of up to 50 m, the remote control enables seamless operation from a distance. The mechanism for ladder climbing utilizes a rack-and-pinion system, which is pivotal in enabling the robot’s movement. With its straightforward structure, this robot can be assembled without difficulty. In our dissertation, we focused on optimizing its slow-moving capabilities. Our robot weighs approximately 9 kg. Powered by a rechargeable 1.2 Ah battery, the robot can operate continuously for about an hour when fully charged. This robot can carry out essential functions such as material escalation, security services, and surveillance, making it versatile in various applications. It finds utility in construction sites for material transportation and can even function as a surveillance or security patrol robot. Additionally, it has potential as a combat robot. Given its tele-operated nature, thereis potential to further automate this robot. Additional security measures could be incorporated to address any mechanical failures. Moreover, outfitting the robot with sensors and a higher-capacity battery could an enhance its mobility over longer distances.
Author Contributions
B.V.R., M.T., P.H.J.V. and Y.P. contributed their knowledge at every stage where ever required. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all informants involved in the study.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Agrawal, S.K.; Yan, J. A three-wheel vehicle with expanding wheels: Differential flatness, trajectory planning and control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 1450–1455. [Google Scholar]
- Gupta, R.; Singh, C.; Dang, R.K. Stair Climbing Robot. Int. J. Sci. Res. 2015, 4, 50–53. [Google Scholar]
- Yang, H.-A.; Rojas, L.C.V.; Xia, C.; Guo, Q. Dynamic Rocker-Bogie: A Stability Enhancement for High-Speed Traversal. Int. J. Robot. Autom. 2014, 3, 212–220. [Google Scholar]
- Deepak BB, V.L.; Parhi, D. Intelligent adaptive immune-based motion planner of a mobile robot in cluttered environment. Intell. Serv. Robot. 2013, 6, 155–162. [Google Scholar] [CrossRef]
- Maheswari, R.; Rani, S.S.; Gomathy, V.; Sharmila, P. Real Time Environment Simulation through Virtual Reality. Int. J. Eng. Technol. (IJET) 2018, 7, 404–406. [Google Scholar]
- Deepak, B.B.V.L.; Bahubalendruni, M.R.; Biswal, B.B. Development of in-pipe robots for inspection and cleaning tasks: Survey, classification and comparison. Int. J. Intell. Unmanned Syst. 2016, 4, 182–210. [Google Scholar] [CrossRef]
- Yadav, N.; Bhardwaj, B.; Bhardwaj, S. Design analysis of Rocker Bogie Suspension System and Access the possibility to implement in Front Loading Vehicles. J. Mech. Civ. Eng. 2015, 12, 64–67. [Google Scholar]
- Chinchkar, D.; Gajghate, S.; Panchal, R.; Shetenawar, R.M.; Mulik, P.S. Design of Rocker Bogie Mechanism. Int. Adv. Res. J. Sci. Eng. Technol. 2017, 4, 46–50. [Google Scholar]
- Siegwart, R.; Lamon, P.; Estier, T.; Lauria, M.; Piguet, R. Innovative design for wheeled locomotion in rough terrain. Robot. Auton. Syst. 2002, 40, 151–162. [Google Scholar] [CrossRef]
- Gunji, B.; Deepak, B.B.V.L.; Saraswathi, M.B.L.; Mogili, U.R. Optimal path planning of mobile robot using the hybrid cuckoo–bat algorithm in assorted environment. Int. J. Intell. Unmanned Syst. 2019, 7, 35–52. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).