

Shear and Bending Stresses in Prismatic, Non-Circular-Profile Shafts with Epitrochoidal Contours Under Shear Force Loading

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
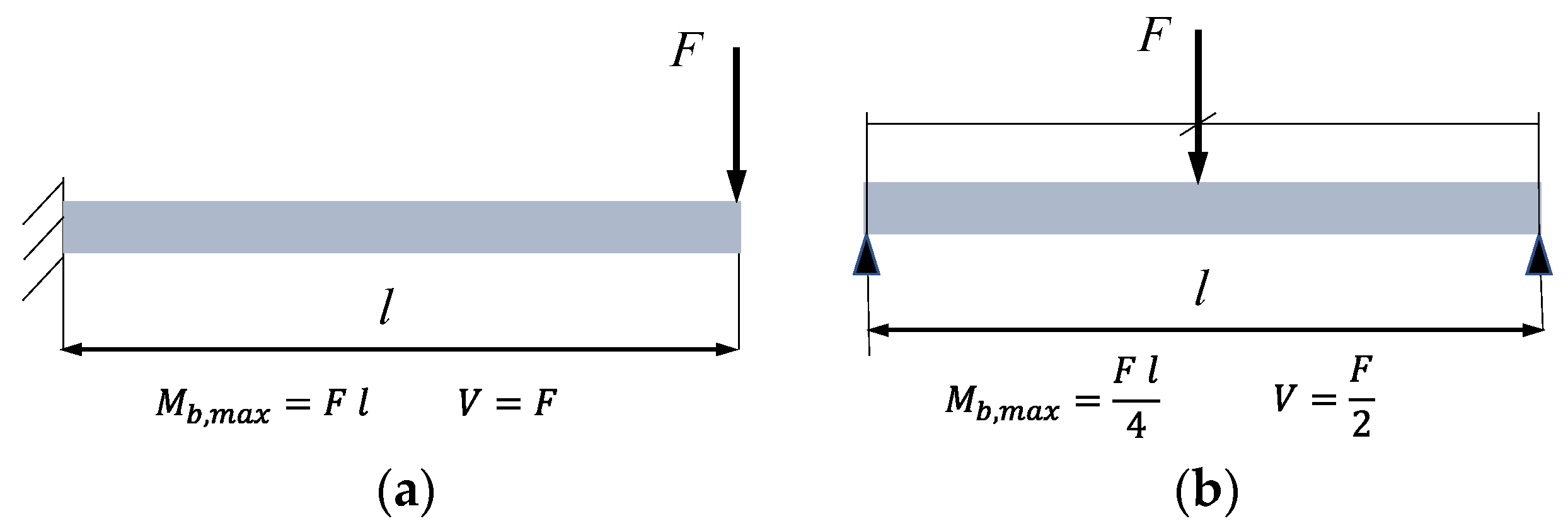
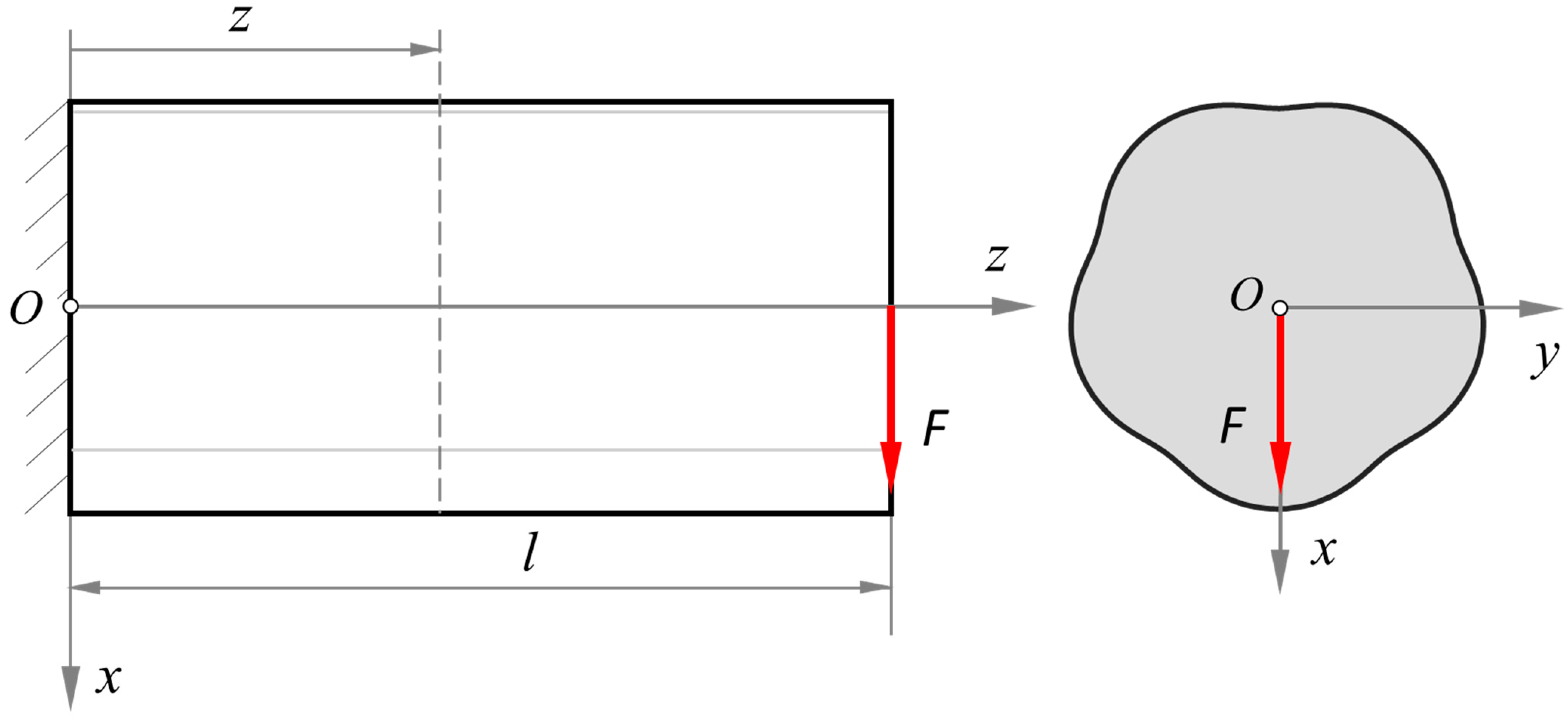
General Considerations of the Lateral Shear Loading
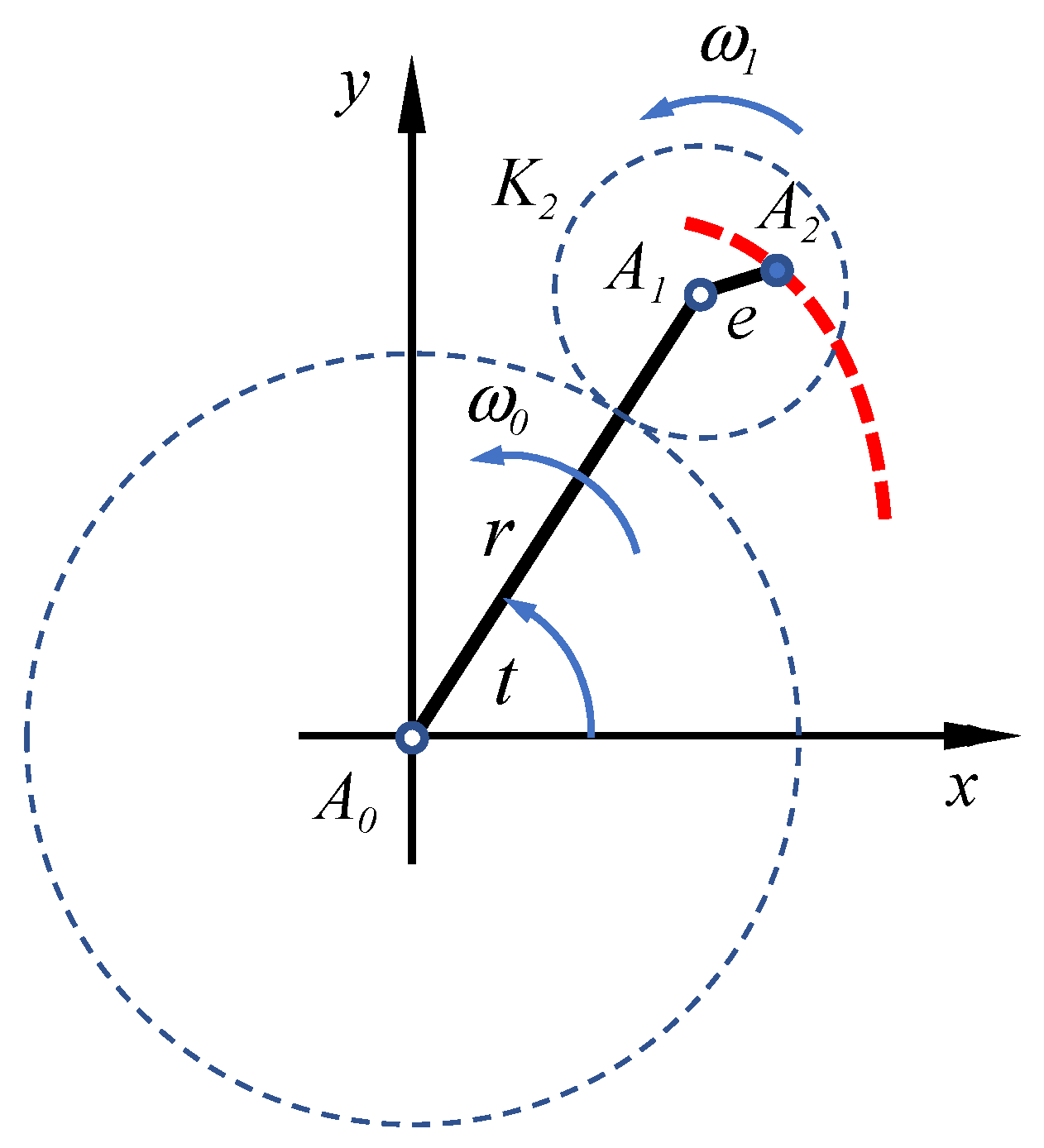
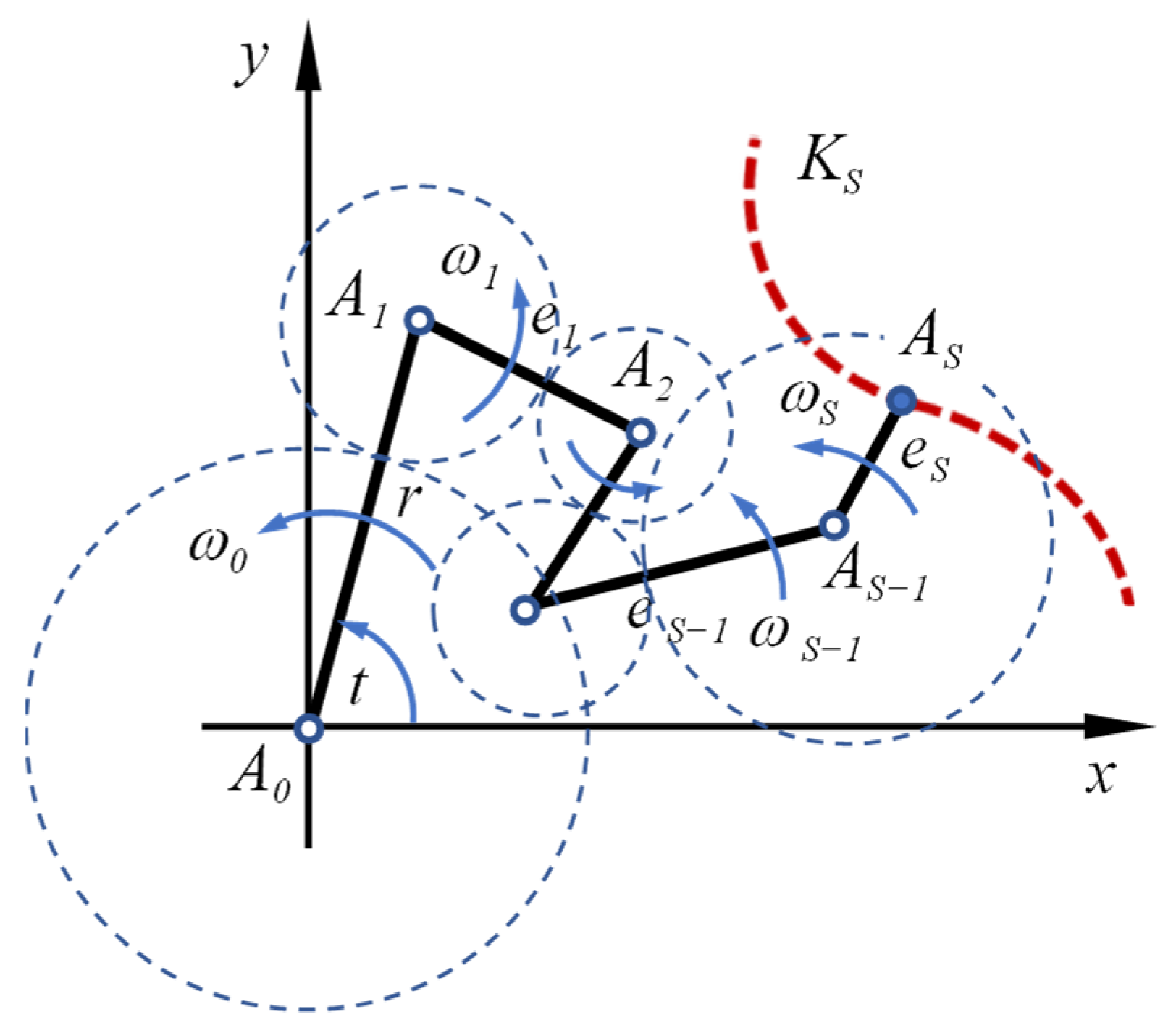
2. Geometrical Description
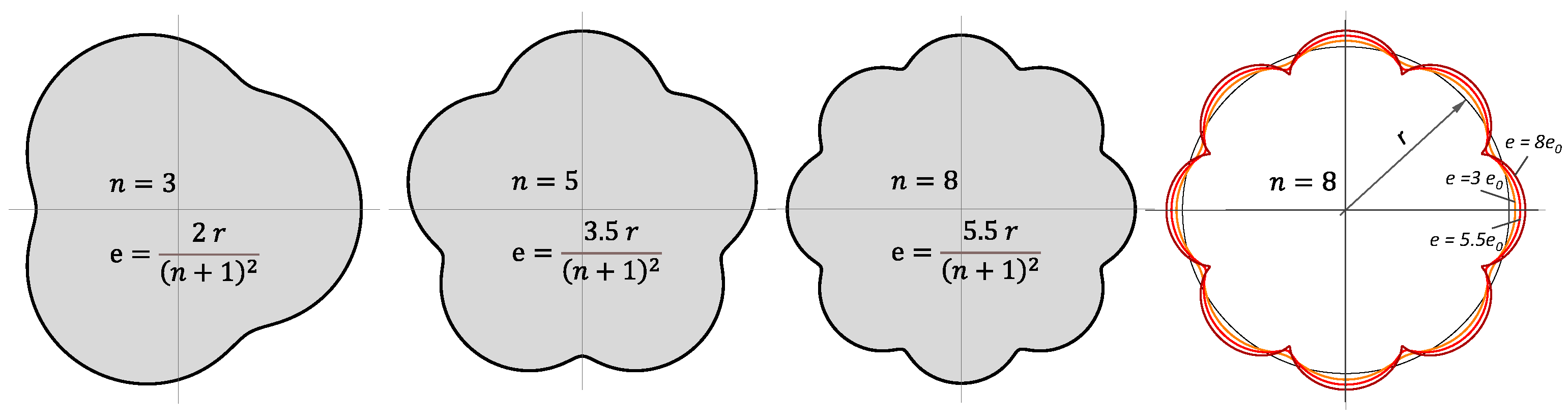
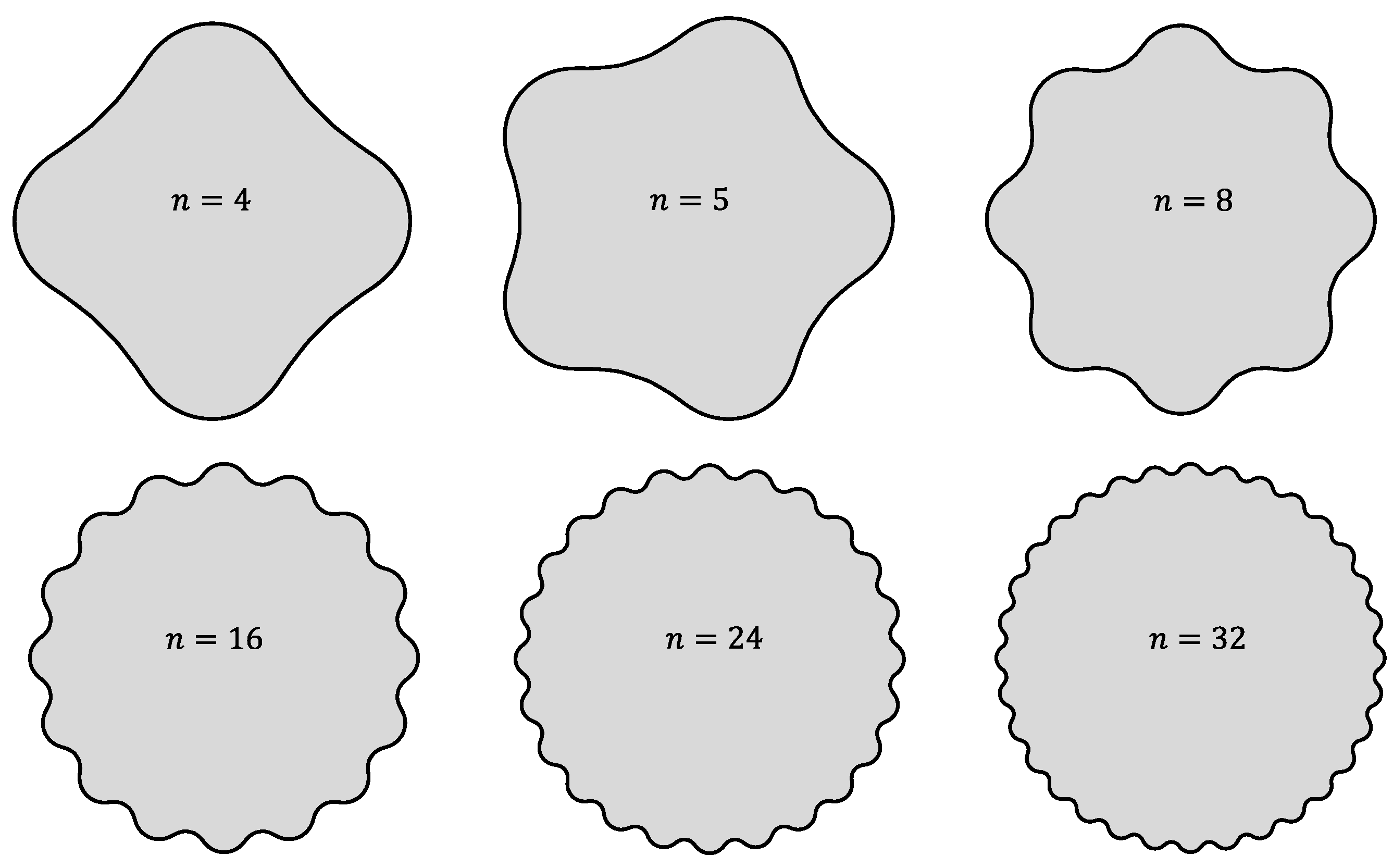
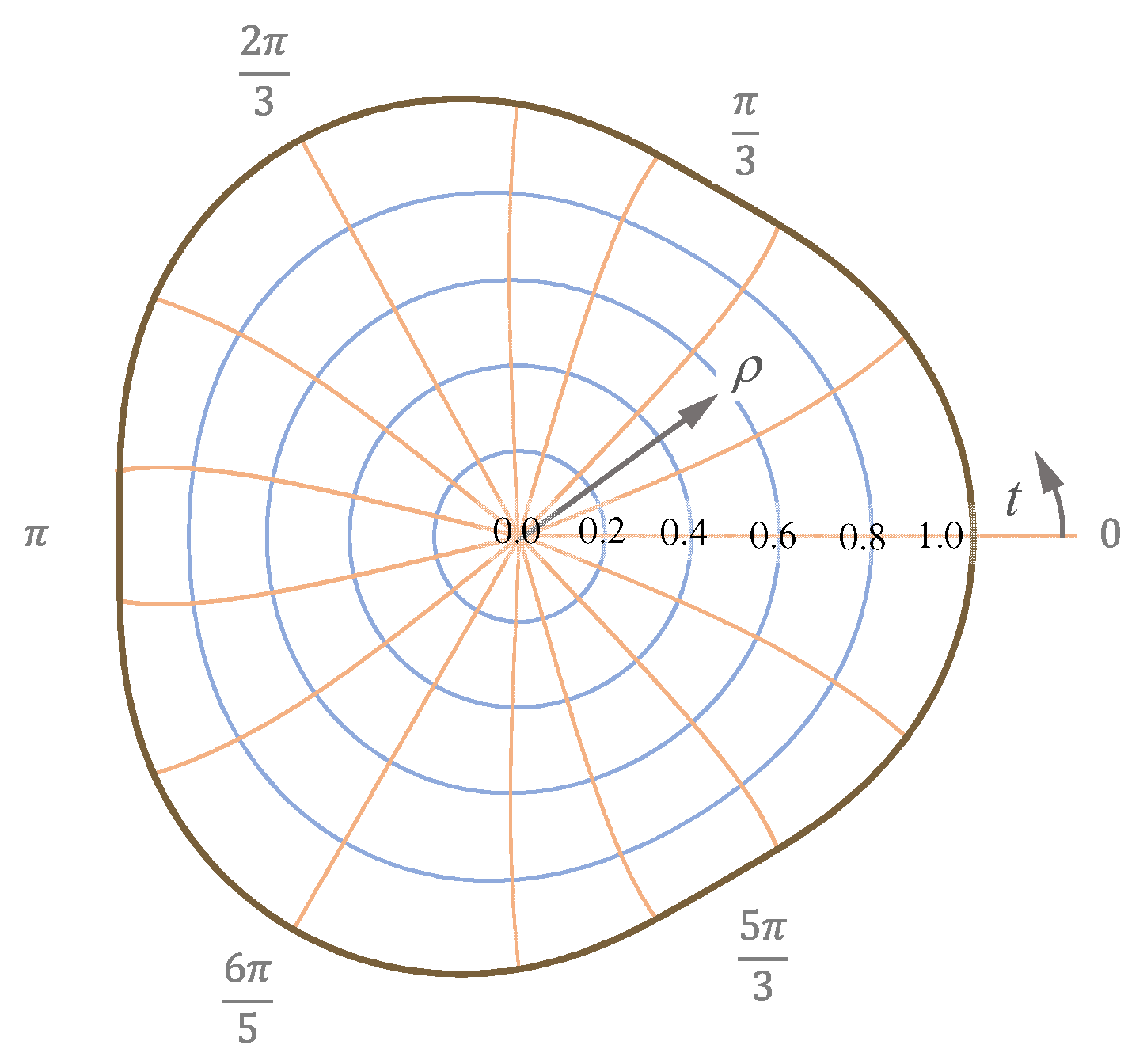
2.1. Simple Epicycloids
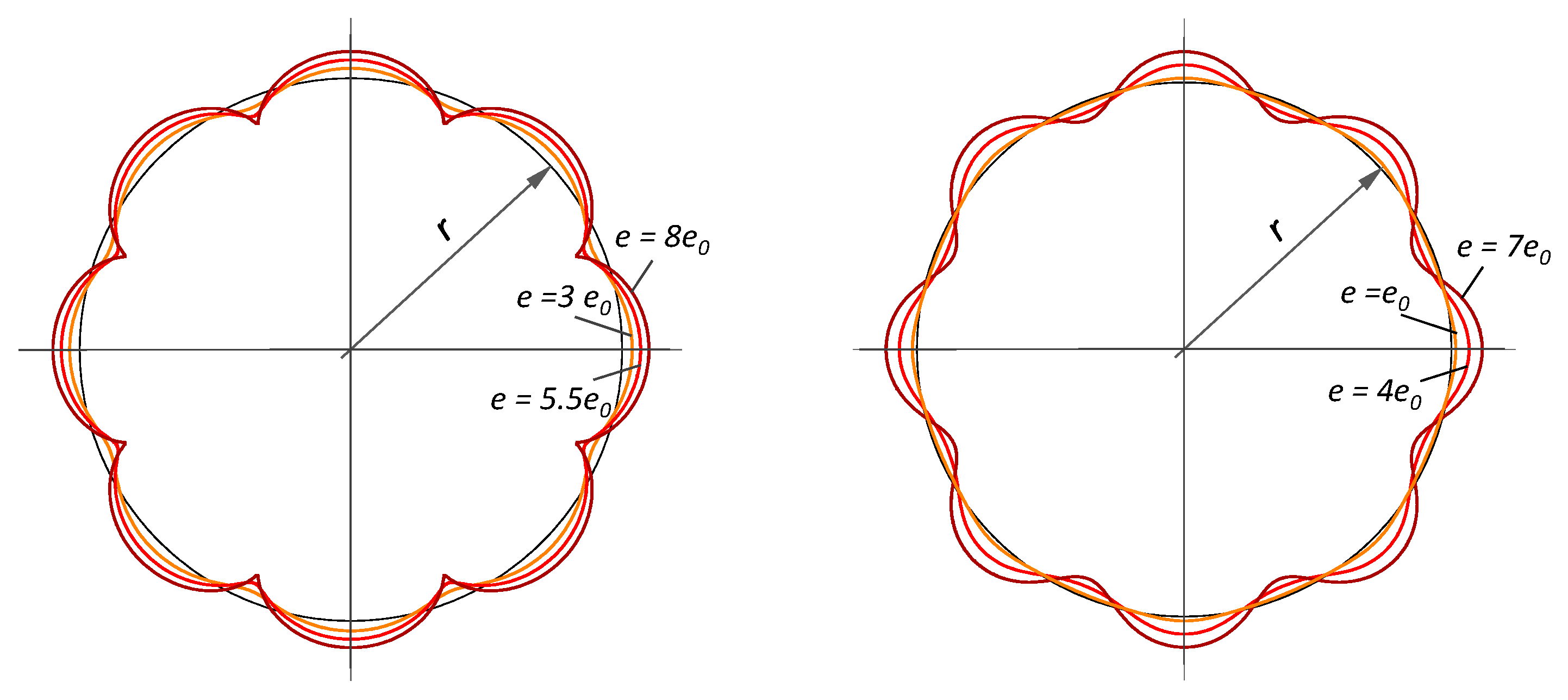
2.2. Higher Epitrochoids
2.3. State of the Art
2.3.1. Torsional Loading
2.3.2. Pure Bending Load
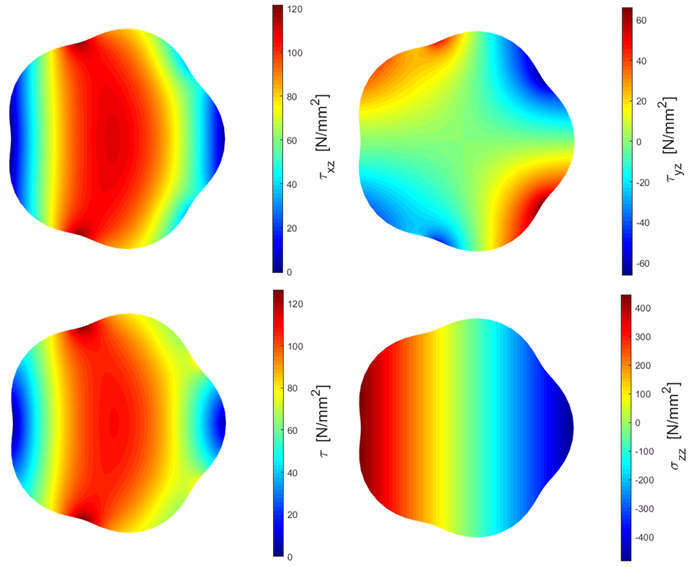
2.4. Shear Force Bending and Formulation
Procedure for Determining
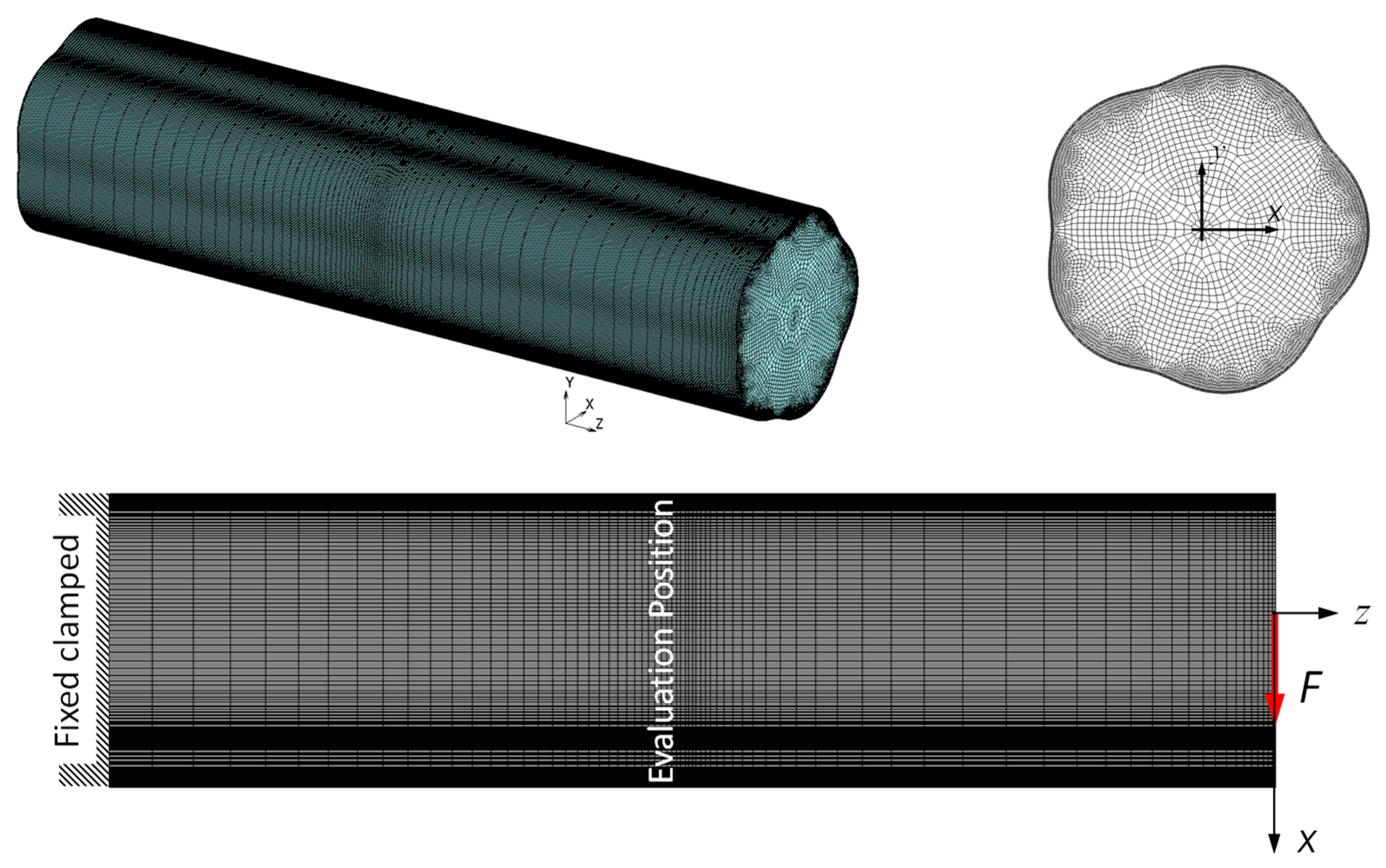
3. Applications
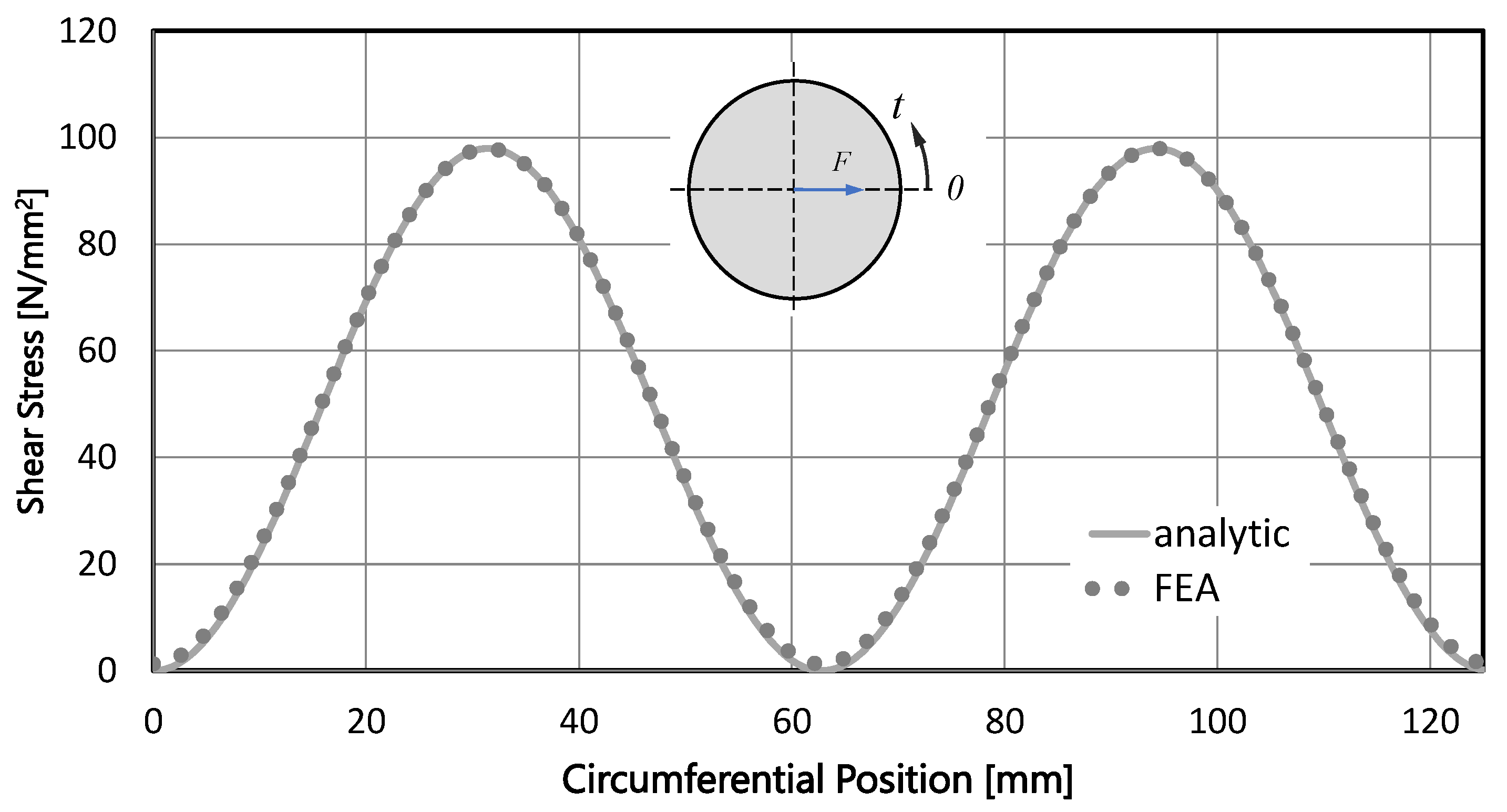
3.1. Circular Cross-Section
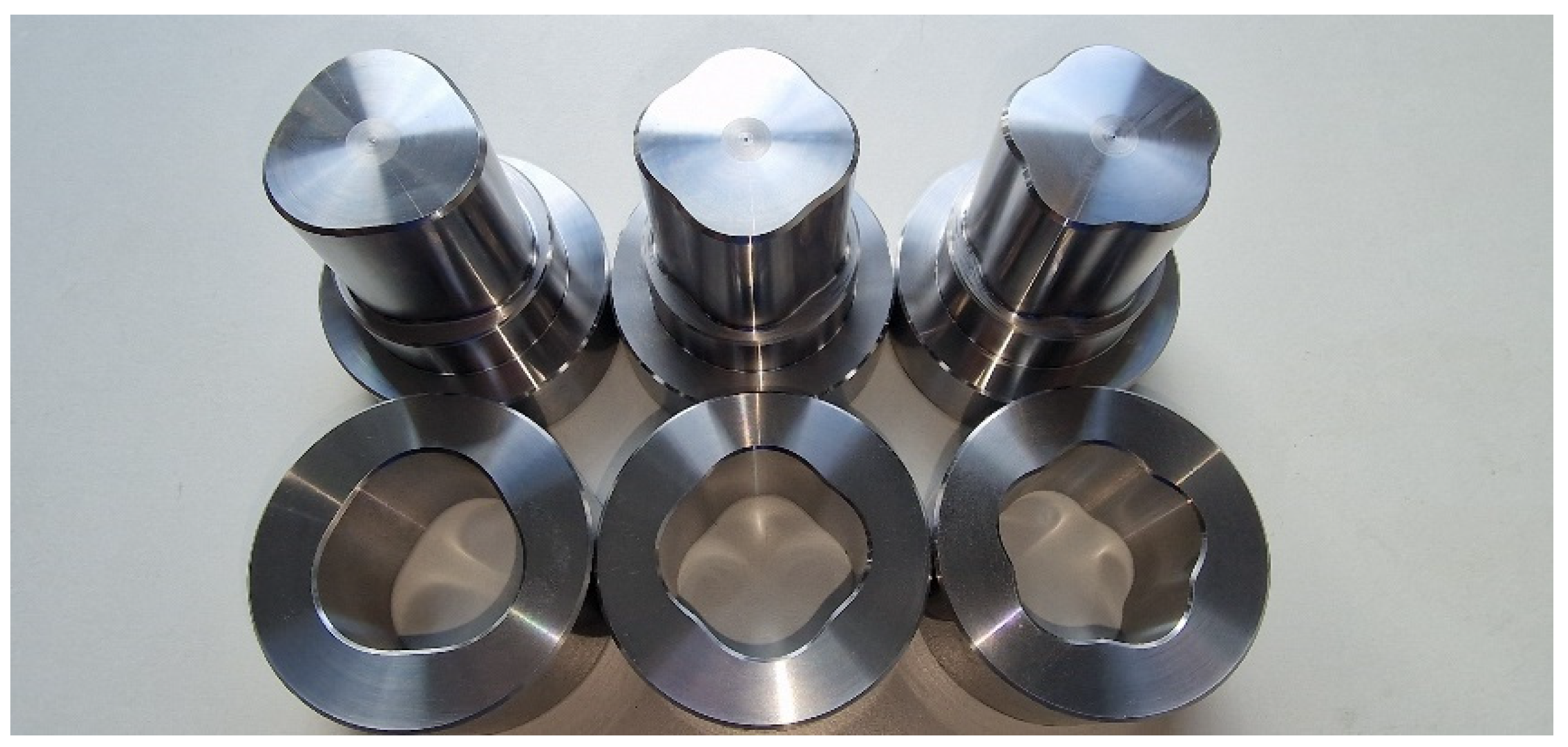
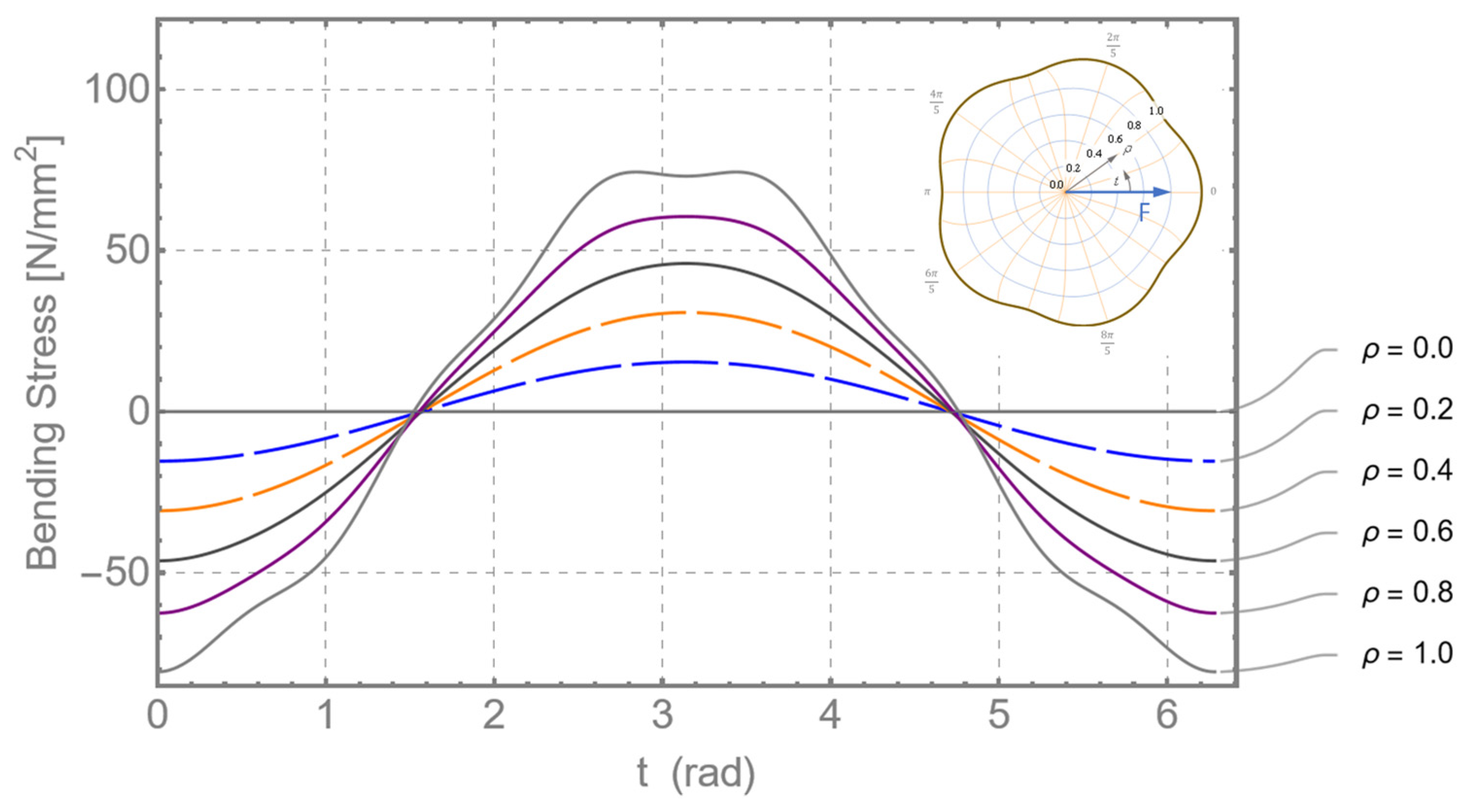
3.2. Epitrochoidal Profile Cross-Sections
3.3. Bending Stress According to [20]
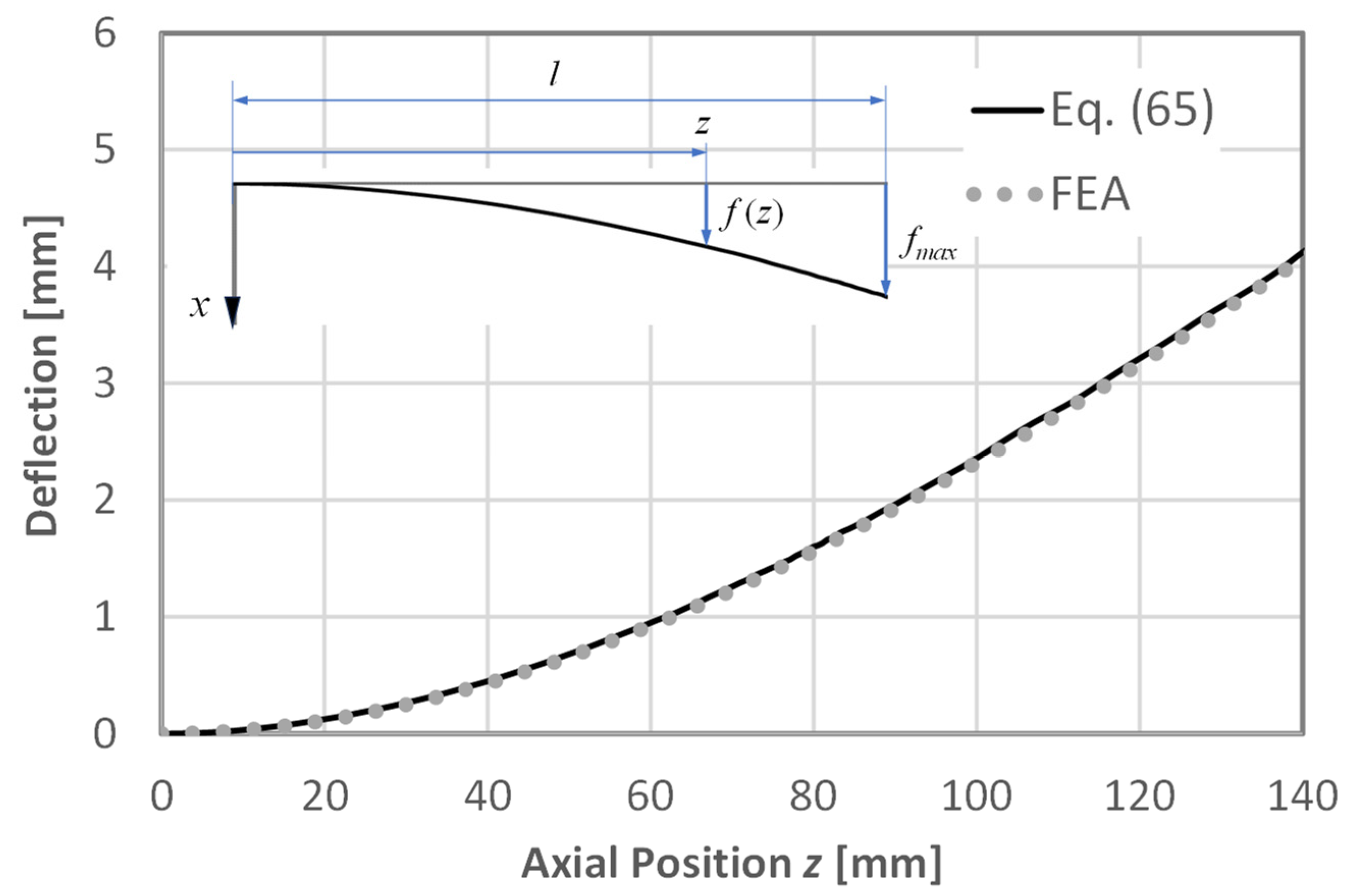
3.4. Deformations
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Formula symbols: | ||
| mm2 | Area of profile cross-section | |
| e | mm | Profile eccentricity |
| e | - | Euler’s number |
| E | MPa | Young’s modulus |
| F | N | Shear force |
| mm | Deflection | |
| Torsiol stress function in the polygon coordinate system | ||
| Bending stress function in the polygon coordinate system | ||
| Bending stress function in the Cartesian coordinate system | ||
| , | mm4 | Area moment of inertia in the Cartesian coordinate system |
| l | mm | Length of profile shaft |
| Nm | Bending moment | |
| n | - | Profile periodicity (number of sides) |
| mm3 | First moment of area | |
| r | mm | Nominal or mean radius |
| t | - | Profile parameter angle |
| mm | Displacement components | |
| x, y, z | mm | Cartesian coordinates |
| Complex function of polygon contour | ||
| Greek formula symbols: | ||
| - | Relative eccentricity | |
| Rotation angle of the coordinate system | ||
| Real stress function in Cartesian coordinate system | ||
| - | Physical plane unit circle | |
| Poisson’s ratio | ||
| Real part of torsion function in polygon coordinate system | ||
| Real part of stress function in Cartesian coordinate system | ||
| Real part of stress function in polygon coordinate system | ||
| Imaginary part of torsion function in polygon coordinate system | ||
| Imaginary part of stress function in Cartesian coordinate system | ||
| Imaginary part of stress function in polygon coordinate system | ||
| Curvilinear polygonal coordinates | ||
| MPa | Bending stress (z-component of stress vector) | |
| MPa | Shear stress components | |
| MPa | Total shear stress | |
| - | Coformal mapping function | |
| - | Complex variable in model plane | |
Appendix A
Appendix B. MATLAB Code for Visualization of the Stresses


References
- DIN 5480-2:2015-03; Passverzahnungen mit Evolventenflanken und Bezugsdurchmesser—Teil 2: Nennmaße und Prüfmaße. DIN-Deutsches Institut für Normung e.V.: Berlin, Germany, 2015.
- Ziaei, M.; Selzer, M.; Sommer, S. Influence of a Shaft Shoulder on the Torsional Load-Bearing Behaviour of Trochoidal Profile Contours as Positive Shaft–Hub Connections. Eng 2024, 5, 834–850. [Google Scholar] [CrossRef]
- Selzer, M.; Ziaei, M.; Forbrieg, F. Einblick in die Festigkeitsberechnung nach DIN 3689 genormter hypotrochoidischer Welle-Nabe-Verbindungen unter reiner Torsionsbeanspruchung, Forschung im Ingenieurwesen. Forsch Ingenieurwes 2024, 88, 20. [Google Scholar] [CrossRef]
- Maximov, J.T.; Hristov, H. Machining of Hypocycloidal Surfaces by Adding Rotations around Parallel Axes, Part I: Kinematics of the Method and Rational Field of Application. Trakya Univ. J. Sci. 2005, 6, 1–11. [Google Scholar]
- Iprotec GmbH. Polygonverbindungen. Available online: www.iprotec.de (accessed on 22 October 2024).
- DIN 3689-1:2021-11; Shaft to Collar Connection—Hypotrochoidal H-Profiles—Part 1: Geometry and Dimensions. Beuth-Verlag: Berlin, Germany, 2021.
- Knabner, D.; Suchy, L.; Radtke, S.; Leidich, E.; Hasse, A. Fretting fatigue of cast iron and aluminium—A strength assessment method based on a worst-case assumption. Int. J. Fatigue 2024, 182, 108209. [Google Scholar] [CrossRef]
- Selzer, M.; Ziaei, M.; Brůžek, B. Optimierung der Hybriden Trochoiden für Serientaugliche Fertigungstechnologien auf Grundlage einer reinen Torsionsbeanspruchung. In Proceedings of the 10. VDI-Fachtagung “Welle-Nabe-Verbindungen”, Garching bei München, Germany, 6–7 November 2024. Contribution has already been accepted. [Google Scholar]
- Spura, C.; Fleischer, B.; Wittel, H.; Jannasch, D. Roloff/Matek Maschinenelemente Springer Fachmedien Wiesbaden, Normung, Berechnung, Gestaltung, 26th ed.; Springer Vieweg: Wiesbaden, Germany, 2023. [Google Scholar]
- Hagedorn, P. Technische Mechanik/Festigkeitslehre, 4., überarbeitete Auflage, Frankfurt am Main; Harri Deutsch Verlag: Thun, Switzerland, 2006. [Google Scholar]
- Dmitrii Ivanovich Zhuravskii. Available online: https://en.wikipedia.org/wiki/Dmitrii_Ivanovich_Zhuravskii (accessed on 18 October 2024).
- Hibbeler, R.C. Mechanics of Material, 8th ed.; Pearson, Prentice Hall: Hoboken, NJ, USA, 2011. [Google Scholar]
- Kharlab, V.D. On Elementary Theory of Tangent Stresses at Simple Bending of Beams. Procedia Struct. Integr. 2017, 6, 286–291. [Google Scholar] [CrossRef]
- Zwikker, C. The Advanced Geometry of Plane Curves and Their Applications, Dover Books on Advanced Mathematics; Courier Corporation: Chelmsford, MA, USA, 1963. [Google Scholar]
- Wunderlich, W. Ebene Kinematik; Bibliographisches Institut: Mannheim, Germany, 1968. [Google Scholar]
- Ziaei, M. Optimale Welle-Nabe-Verbindung mit mehrfachzyklischen Profilen, 5; VDI-Fachtagung “Welle-Nabe-Verbindungen”: Nürtingen, Germany, 2012. [Google Scholar]
- Frank, A.; Pflanzl, M.; Mayer, R. Vom K-Profil und Polygonprofil zu funktionsoptimierten Unrundprofilen—Eine österreichische Entwicklung. Fert. Präzision Spieg. 1992, 3, 42–48. [Google Scholar]
- Musyl, R. Die kinematische Entwicklung der Polygonkurve aus dem K-Profil. Wärmewirtschaft 1955, 10, 18–22. [Google Scholar]
- DIN 32711; Welle-Nabe-Verbindung—Polygonprofil P3G, Teil 1. Deutsches Institut für Normung e.V.: Berlin, Germany, 2009.
- Ziaei, M. Bending Stresses and Deformations in Prismatic Profiled Shafts with Noncircular Contours Based on Higher Hybrid Trochoids. Appl. Mech. 2022, 3, 1063–1079. [Google Scholar] [CrossRef]
- Ziaei, M. Analytische Untersuchung unrunder Profilfamilien und numerische Optimierung genormter Polygonprofile für Welle-Nabe-Verbindungen. Postdoctoral Thesis, Technische Universität Chemnitz, Chemnitz, Germany, 2002. [Google Scholar]
- Ziaei, M. Torsionsspannungen in Prismatischen, Unrunden Profilwellen mit Trochoidischen Konturen. Forsch. Ingenieurwesen 2021, 85, 985–995. [Google Scholar] [CrossRef]
- Ziaei, M. Bending and Torsional Stress Factors in Hypotrochoidal H-Profiled Shafts Standardised According to DIN 3689-1. Eng 2023, 4, 829–842. [Google Scholar] [CrossRef]
- Muskelishvili, N.I. Some Basic Problems of the Mathematical Theory of Elasticity; Springer: Dordrecht, The Netherlands, 1977. [Google Scholar]
- Sokolnikoff, I.S. Mathematical Theory of Elasticity; Robert E. Krieger Publishing Company: Malaba, FL, USA, 1983. [Google Scholar]
- Kantorovich, L.V.; Krylov, V.I. Approximate Methods of Higher Analysis; Translation Edition; Dover Publications: Dover, UK; Mineola, NY, USA, 2018. [Google Scholar]
- MSC Software Corporation. Marc 2020 Manual; Volume B (Element Library); MSC Software Corporation: Newport Beach, CA, USA, 2020. [Google Scholar]
- Timoshenko, S.P.; Goodier, J.N. Theory of Elasticity; McGraw-Hill Book Company: New York, NY, USA, 1985. [Google Scholar]
- MATLAB The MathWorks, Inc. MATLAB Version: 9.13.0 (R2022b). 2023. Available online: https://www.mathworks.com (accessed on 1 January 2023).





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziaei, M. Shear and Bending Stresses in Prismatic, Non-Circular-Profile Shafts with Epitrochoidal Contours Under Shear Force Loading. Eng 2024, 5, 2752-2777. https://doi.org/10.3390/eng5040144
Ziaei M. Shear and Bending Stresses in Prismatic, Non-Circular-Profile Shafts with Epitrochoidal Contours Under Shear Force Loading. Eng. 2024; 5(4):2752-2777. https://doi.org/10.3390/eng5040144
Chicago/Turabian StyleZiaei, Masoud. 2024. "Shear and Bending Stresses in Prismatic, Non-Circular-Profile Shafts with Epitrochoidal Contours Under Shear Force Loading" Eng 5, no. 4: 2752-2777. https://doi.org/10.3390/eng5040144
APA StyleZiaei, M. (2024). Shear and Bending Stresses in Prismatic, Non-Circular-Profile Shafts with Epitrochoidal Contours Under Shear Force Loading. Eng, 5(4), 2752-2777. https://doi.org/10.3390/eng5040144