1. Introduction
The advent of smart farming, powered by the Internet of Things (IoT), has brought a paradigm shift in agricultural practices, enabling real-time monitoring and management of crops [
1]. Smart farming employs a network of sensors and connected devices to collect vast amounts of data on various parameters such as soil moisture, temperature, humidity, and plant health. This data-driven approach allows for precise and timely interventions, optimizing resource use, enhancing crop yield, and minimizing the environmental impact. The integration of IoT in agriculture provides farmers with actionable insights, paving the way for sustainable and efficient farming practices. However, the widespread deployment of IoT sensors in agricultural fields faces significant challenges, including the high cost associated with purchasing and maintaining a large number of devices, limited network coverage in rural and remote areas, and energy constraints that affect the longevity and reliability of battery-powered sensors. For example, in the Errachidia region of Morocco, which is home to vast date palm plantations [
2], the installation and maintenance of numerous IoT sensors across expansive fields can be prohibitively expensive and logistically challenging. The uneven distribution of network coverage in remote areas further exacerbates these challenges, leading to gaps in data collection and delayed interventions. To address these issues, we propose the development of an agricultural robot equipped with IoT sensors, capable of autonomously navigating the plantation to monitor and collect data on key parameters such as soil moisture, temperature, and plant health. This robot would provide an efficient and cost-effective solution for real-time monitoring, reducing the need for a large, fixed network of sensors while ensuring continuous data collection and timely interventions. Furthermore, while some agricultural robots [
3,
4,
5,
6] rely on cloud computing to process and analyze the vast amounts of data collected by IoT sensors, this approach faces several limitations. The centralized nature of cloud computing often results in high latency, as data must be transmitted from remote field locations to the cloud for processing and then back to the robot for action. This delay can significantly hinder real-time decision-making, which is critical for tasks such as disease management and irrigation control in agriculture. Additionally, transmitting large volumes of data over long distances can strain network bandwidth, leading to inefficiencies, slower response times, and increased operational costs. To overcome these challenges, we propose the integration of a fog computing architecture tailored for agricultural robots. By utilizing fog nodes deployed at the edge of the network, closer to the data source, data processing and decision-making can occur locally, reducing the need for long-distance data transmission. This architecture significantly decreases latency and alleviates bandwidth strain, ensuring faster, more efficient real-time decision-making. The fog computing paradigm enables local processing on nearby fog nodes, ensuring timely interventions and efficient resource management, which are essential for optimizing agricultural operations and enhancing the performance of IoT-based robots in smart farming and date palm monitoring.
The main contributions of this paper are as follows: First, we propose a fog-enabled IoT robotic system for efficient date palm monitoring, which integrates an IoT-based agricultural robot equipped with sensors to autonomously collect data on key parameters such as soil moisture, temperature, and plant health. This system addresses the challenges of deploying and maintaining large, fixed sensor networks in remote agricultural areas. Second, we develop an IoT robot-driven algorithm for fog-enabled environmental monitoring and precision irrigation, which prioritizes tasks based on resource availability and urgency, ensuring efficient operation and energy optimization. Finally, we evaluate the proposed framework using iFogSim, focusing on metrics such as latency, bandwidth utilization, and energy consumption. The results demonstrate the advantages of the fog computing paradigm over cloud-based approaches, particularly in date palm plantations, where cost, network coverage, and energy efficiency are significant concerns.
2. Related Work
IoT-based smart farming relies extensively on sensors to revolutionize agricultural practices. These sensors are the cornerstone of IoT systems, enabling the real-time collection of essential data such as soil moisture, temperature, and plant health. Numerous studies have explored the application of IoT sensors in smart farming, with a focus on improving crop monitoring, optimizing irrigation systems, and enhancing disease detection. For instance, the authors in [
7] developed an IoT-based Controlled Subsurface Irrigation System (CSIS) aimed at improving water management for date palms. The system, which uses sensors and the ThingSpeak platform for real-time monitoring and data analysis, demonstrated that sensor-based irrigation is more water-efficient than traditional methods. In this work [
8], an IoT-based system combining NodeMCU, drones, and sensors was proposed to monitor agricultural parameters, utilizing cloud analytics for real-time insights and precision farming. In [
9], the authors explored the integration of IoT devices such as soil moisture sensors, temperature sensors, and rainfall prediction tools, focusing on their potential to modernize agriculture by enhancing crop selection and productivity through real-time data collection and analysis. In their work [
10], the authors introduced a low-cost IoT-based system for soil monitoring, which integrates a capacitive sensor and AD5933 impedance converter to measure soil salinity and water content simultaneously, offering promising results for sustainable agriculture. In [
11], a low-cost IoT network model for precision agriculture was proposed, featuring near-infrared sensors and LoRaWAN for efficient, low-power data collection across extensive fields. This model integrates edge- and cloud-based machine learning analytics to enable real-time agricultural monitoring and decision-making. In addition,
Table 1 summarizes some of the proposed sensors used in IoT-based smart farming.
Furthermore, the cloud plays a pivotal role in IoT-based smart farming by providing a centralized platform for data storage, processing, and analysis. It enables the aggregation of data from numerous sensors deployed across large agricultural areas, allowing farmers to access real-time insights and make informed decisions. Cloud computing also facilitates the use of advanced analytics and machine learning algorithms to process complex datasets, optimize irrigation schedules, and predict crop yields. In [
24], a cloud-based monitoring platform was developed using the Platform-as-a-Service layer to manage greenhouse resources. Additionally, this work [
25] provides a comprehensive survey of IoT sensor monitoring network technologies in agriculture, emphasizing the role of cloud computing. However, the use of IoT-based sensors for date palm cultivation, as explored in previous studies, reveals several critical limitations, particularly in the areas of cost, network reliability, maintenance, and sensor battery life. The high cost of deploying large-scale sensor networks in date palm plantations is a significant challenge, as the installation of various sensors for soil moisture, temperature, and humidity can be expensive, especially in regions with limited infrastructure. In addition, the cost of ongoing maintenance and the need for frequent calibration of these sensors can impose a heavy financial burden on farmers. The reliability of sensor networks is also a concern, particularly in remote date palm farms where network connectivity may be unstable. Wireless sensor networks often face issues with signal degradation or loss over long distances, which can result in gaps in data collection. Furthermore, the battery life of many IoT sensors poses a major challenge, as sensors in large plantations may require frequent battery replacements, adding to operational costs and disrupting continuous monitoring for efficient irrigation and disease detection.
In addition, the use of cloud computing in IoT-based smart farming presents several limitations. While cloud platforms offer centralized data processing and storage, they also introduce challenges related to latency, bandwidth requirements, and data security. For example, in palm disease detection, real-time processing is critical, but the reliance on cloud services can cause delays due to network latency, particularly when large amounts of data must be transmitted from remote farms. This can hinder timely decision-making for disease management. Additionally, the dependence on stable internet connections for cloud access can be problematic in rural areas with unreliable connectivity. The transfer of large volumes of sensor data to the cloud can strain bandwidth, potentially leading to data bottlenecks and reduced system efficiency.
To overcome these challenges, we propose a fog-enabled IoT robotic system for efficient date palm monitoring. By integrating fog computing with autonomous robotics, the system can process data locally at the edge, reducing reliance on cloud services and mitigating issues such as network latency and bandwidth constraints. The robot can collect data from sensors deployed across the plantation and perform real-time analysis on-site, minimizing delays and ensuring timely decision-making for disease detection and irrigation management.
3. Proposed Fog-Enabled IoT Robotic System for Efficient Date Palm Monitoring
In this section, we present the design and architecture of the proposed fog-enabled IoT robotic system, which aims to enhance the monitoring and management of date palm plantations. This system integrates robotics, IoT sensors, and fog computing to provide efficient real-time data collection, environmental monitoring, and precision irrigation management. The following subsections describe the main components and functionalities of the system in detail.
3.1. Main Componenets of the Proposed System Architecture
3.1.1. IoT Robotic Sensor Layer
The proposed system architecture revolves around an IoT-based robot, as illustrated in
Figure 1, equipped with a minimal yet high-efficiency sensor array tailored for monitoring date palm trees in both open plantations and greenhouses. The robot autonomously navigates through fields and greenhouses, where young palm trees require more intensive monitoring. Rather than deploying numerous sensors across vast areas, the robot optimizes data collection by utilizing a focused set of sensors capable of performing key tasks such as monitoring environmental conditions, detecting disease, and managing irrigation. Through its movement and strategic sensor deployment, the robot collects real-time data on parameters like soil moisture, temperature, and humidity, providing crucial insights while minimizing sensor usage. This approach ensures cost-effectiveness, reduces network complexity, and offers precise, high-quality monitoring for both outdoor and greenhouse environments. The robot, therefore, enhances irrigation precision and disease management, especially in high-maintenance settings like date palm greenhouses.
3.1.2. Fog Computing Layer
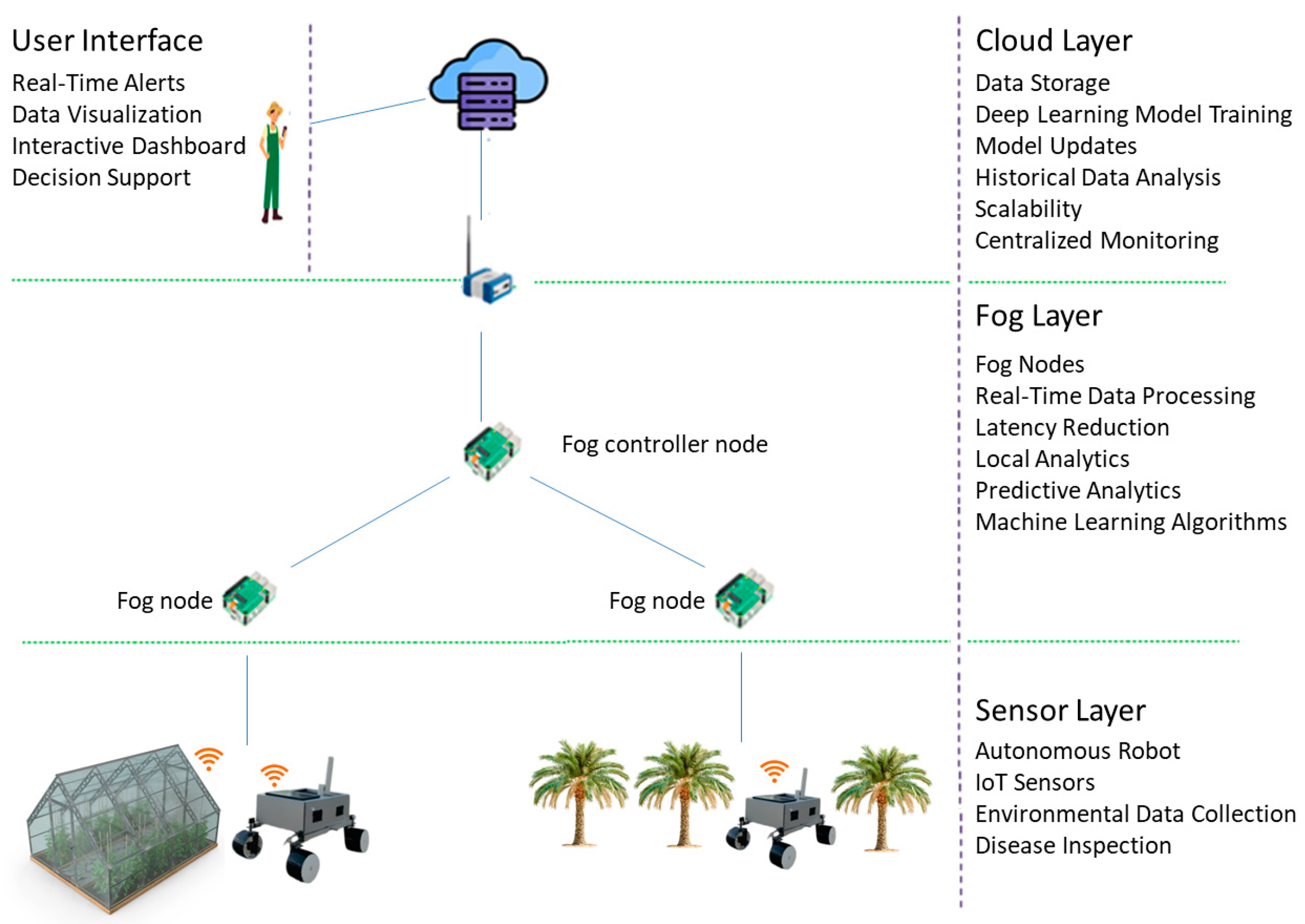
As presented in
Figure 2, the fog computing layer consists of distributed fog nodes strategically positioned within or near the date palm plantation. These nodes, such as gateways or edge servers, act as intermediaries between the robot’s sensors and the cloud, enabling localized data processing. By handling real-time data analysis at the edge, fog nodes minimize latency and reduce reliance on cloud services, ensuring faster response times for critical tasks such as environmental monitoring and precision irrigation management. Additionally, they support machine learning algorithms for predictive analytics, optimizing irrigation schedules and detecting potential issues like environmental stress or disease risks. In addition, fog computing enhances security and privacy by processing data closer to the source, reducing exposure to cyber threats associated with cloud dependency [
26]. Localized data handling minimizes the risk of breaches and unauthorized access while enabling real-time threat detection, authentication mechanisms, and encrypted communication. This decentralized approach strengthens the resilience and security of smart farming systems.
3.1.3. Cloud Server
The cloud server complements the fog layer by offering scalable storage for the large volumes of data collected from the field. It facilitates tasks such as training and updating deep learning models, which require significant computational resources. Additionally, the cloud provides long-term storage for data, enabling historical analysis and improvements in system performance.
3.1.4. User Interface
The user interface enables farmers and agricultural experts to monitor palm tree health and environmental conditions in real time. It provides timely alerts and notifications about potential issues, such as irrigation needs or disease risks, and displays data in a clear and accessible format. This interface allows users to interact with the system, access relevant information, and make informed decisions, ensuring effective and timely management of date palm cultivation.
3.2. IoT Robot-Driven Algorithm for Fog-Enabled Environmental Monitoring and Precision Irrigation in Date Palm
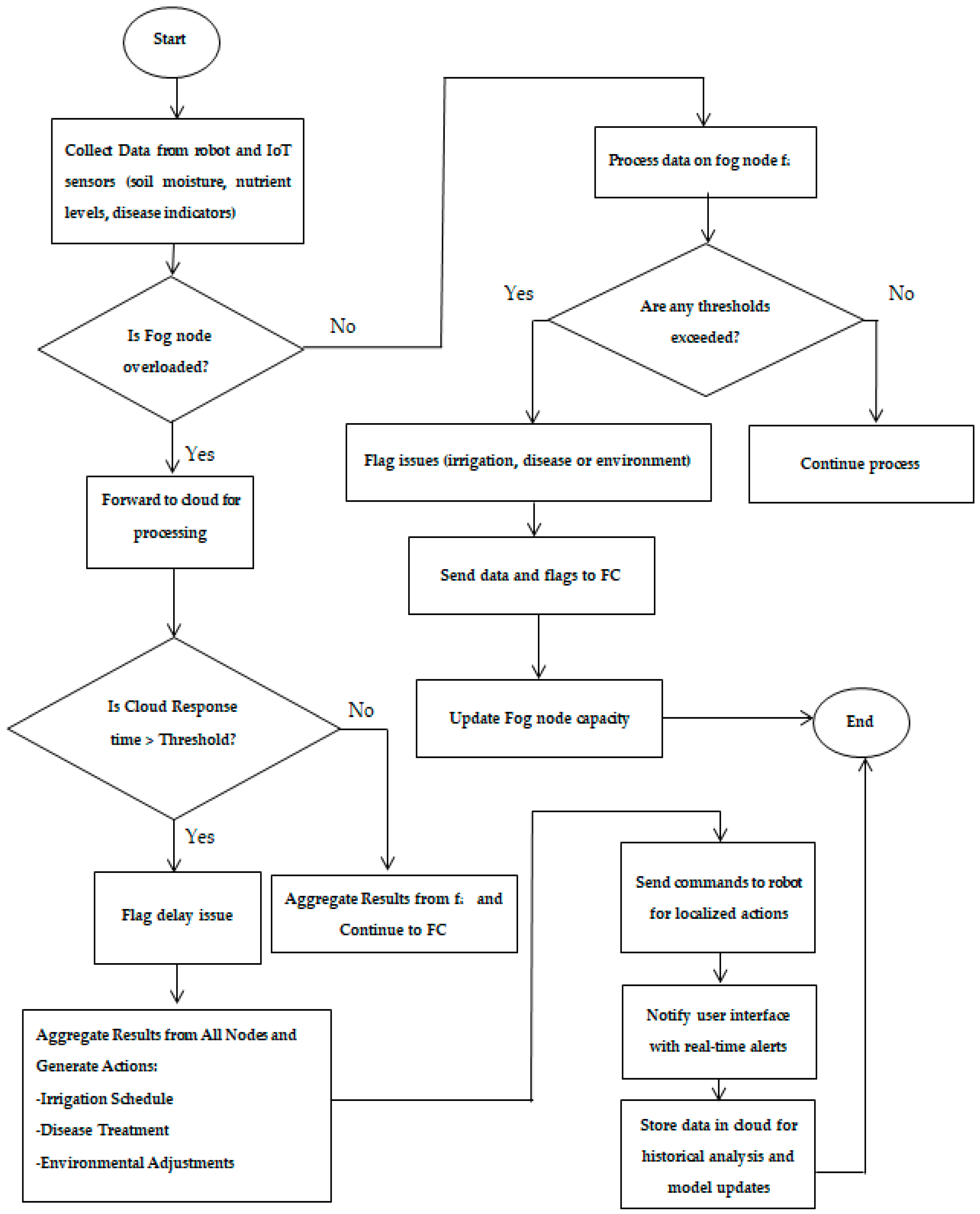
The proposed fog-enabled system, as detailed in
Figure 3, uses IoT robots to monitor and manage date palms in Moroccan oases. Environmental data, including soil moisture, temperature, nutrients, and disease indicators, are collected by the robot and processed through fog nodes. These nodes analyze the data to determine irrigation needs, detect diseases, and identify environmental issues. Based on these analyses, the system generates irrigation schedules, recommends disease treatments, and adjusts environmental conditions. While localized actions are performed by the robot, critical data are sent to the cloud for further processing and storage.
This setup ensures low-latency decision-making and optimized resource usage, improving the efficiency of date palm management.
The IoT robot-driven algorithm for fog-enabled environmental monitoring and precision irrigation leverages the fog computing architecture to address latency-sensitive needs in agricultural robotics. The system begins by collecting environmental data (soil moisture, temperature, nutrient levels, and disease indicators) through the IoT robot’s sensors. To avoid the increased energy consumption associated with relying on the robot’s limited resources for data processing, the data are instead handled locally by the fog nodes. These nodes efficiently analyze the inputs to identify critical issues, such as irrigation requirements or environmental anomalies. By processing data at the edge, the system minimizes latency, ensuring that time-sensitive actions, such as disease detection, are executed quickly without the need for distant cloud servers. Each fog node assesses the data for predefined thresholds. For instance, if soil moisture falls below a set threshold, an irrigation issue is flagged. Similarly, temperature or nutrient imbalances prompt environmental adjustment flags, and disease indicators trigger alerts for potential outbreaks. The processed data, along with the identified flags, are sent to the Fog Controller (FC), which aggregates the results from all fog nodes and coordinates actions. If a fog node is unable to handle the data load, it forwards the information to the cloud for further processing. The Fog Controller ensures that the data are effectively aggregated to generate irrigation schedules, disease treatment recommendations, and environmental adjustments, which are then communicated to the robot for localized action. Real-time notifications are also sent to the user interface, keeping farmers informed of the system’s status.
4. Results
4.1. Implementation of Fog-Enabled IoT Robotic System for Date Palm Monitoring
The system scenario involves an autonomous robot, as shown in
Figure 4, integrated with IoT sensors and a fog computing architecture. The robot traverses date palm plantations, collecting critical data such as soil moisture, temperature, humidity, and visual indicators of disease. These data are processed locally by fog nodes to ensure timely responses and efficient resource management. The robot’s sensing frequency is dynamically adjusted based on monitoring needs, with latency-sensitive tasks, such as real-time plant disease detection, prioritized for immediate processing at the nearest fog node. Routine tasks, like soil moisture monitoring, are scheduled based on resource availability and environmental conditions, optimizing performance and minimizing delays.
4.1.1. Case 1: Routine Monitoring of Environmental Parameters
When soil moisture, temperature, and humidity levels are within acceptable thresholds, the system reduces the frequency of data analysis. This conserves computational resources and extends the operational life of sensors. Aggregated data are stored at the fog node for historical reference, demonstrating the system’s adaptability in non-critical scenarios while maintaining efficient data management.
4.1.2. Case 2: Rapid Response to Irrigation Deficiencies
If soil moisture levels fall below critical thresholds, the system immediately flags the issue as high priority and sends it to the fog scheduler. The fog node closest to the problem area processes the data with minimal latency, triggering actions such as activating the irrigation system.
4.1.3. Case 3: Disease Alerts and Mitigation
When disease symptoms are detected by the robot, such as those caused by Bayoud disease, the system prioritizes the data for immediate processing. High-risk cases are handled at the closest fog node to enable quick intervention and reduce the likelihood of disease spreading.
4.2. System Configuration
The performance evaluation was carried out using the iFogSim simulator to test the efficiency of the proposed system. IFogSim [
27] is a simulation tool specifically designed for modeling IoT, edge, fog, and cloud computing environments.
The simulation was conducted on a Dell computer equipped with an Intel Core i5 processor, 8 GB of RAM, and running Windows 10 64-bit. Key parameters for each fog node, such as CPU capacity, memory, and network bandwidth, were configured as outlined in
Table 2.
The computational hierarchy of the proposed system is organized into five levels to optimize its operation. At the first level are the sensors and actuators integrated into the robotic system, responsible for collecting environmental data and performing actions. The second level consists of fog nodes (FNs) deployed near the plantation to process data locally. The third level comprises Fog Controller Nodes (FCNs), which coordinate the activities of multiple fog nodes. At the fourth level is the proxy layer, which facilitates communication between the FCNs and the cloud. Finally, the fifth level is the cloud server, providing centralized storage and advanced computational capabilities.
In the initial phase of this experiment, the simulation environment was set up with a single Fog Controller Node, three fog nodes, and nine IoT sensors integrated into the robotic system. The performance metrics were evaluated over 200 iterations, and the results were averaged for consistency.
Table 3 presents the findings for key metrics such as average latency, network usage, and energy consumption.
The simulation results show that the proposed fog-enabled smart farming system outperforms the AgriFog [
28] in key metrics such as latency, network usage, and energy consumption.
These improvements are attributed to the efficient utilization of fog nodes for local data processing and the integration of FCNs, which optimize resource coordination and decision-making within the fog architecture.
The proposed fog-enabled architecture for smart farming leverages FCNs to ensure efficient and responsive resource allocation across fog nodes. For example, when soil moisture levels indicate optimal growing conditions, the FCNs adjust data collection and processing intervals to conserve energy and computational resources. In contrast, if soil moisture data reveal drought conditions, the system prioritizes this information for immediate processing at the nearest fog node to promptly activate the irrigation system, preventing potential damage to the crops. Similarly, when the robot detects early signs of pest infestation or plant disease, the data are treated as latency-sensitive and processed with high priority at the nearest fog node to enable rapid interventions, such as activating pest control measures. By dynamically coordinating resources and tasks through FCNs, the system ensures timely and efficient responses to both routine and critical agricultural scenarios.
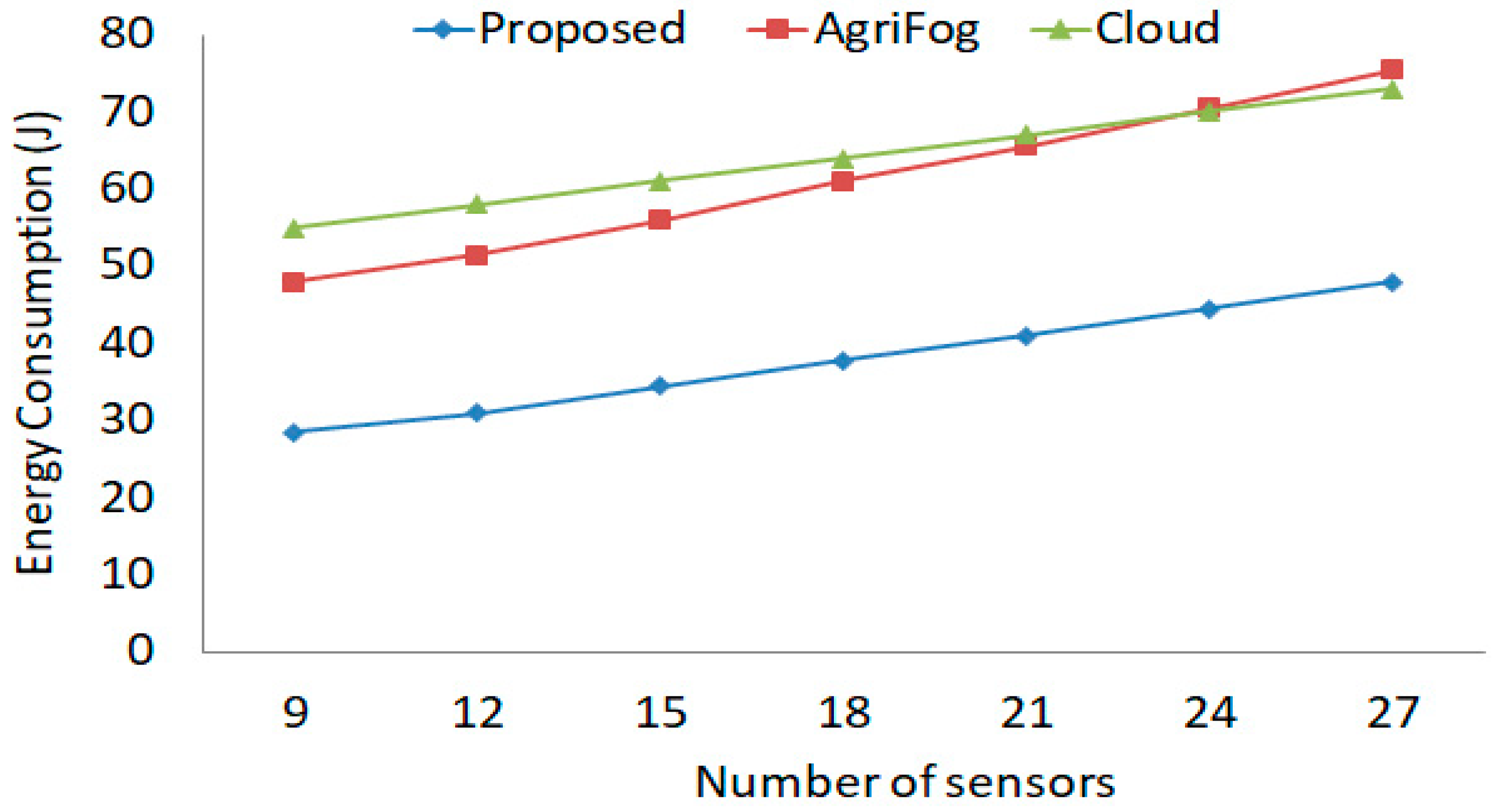
4.2.1. Changing the Number of the IoT Devices
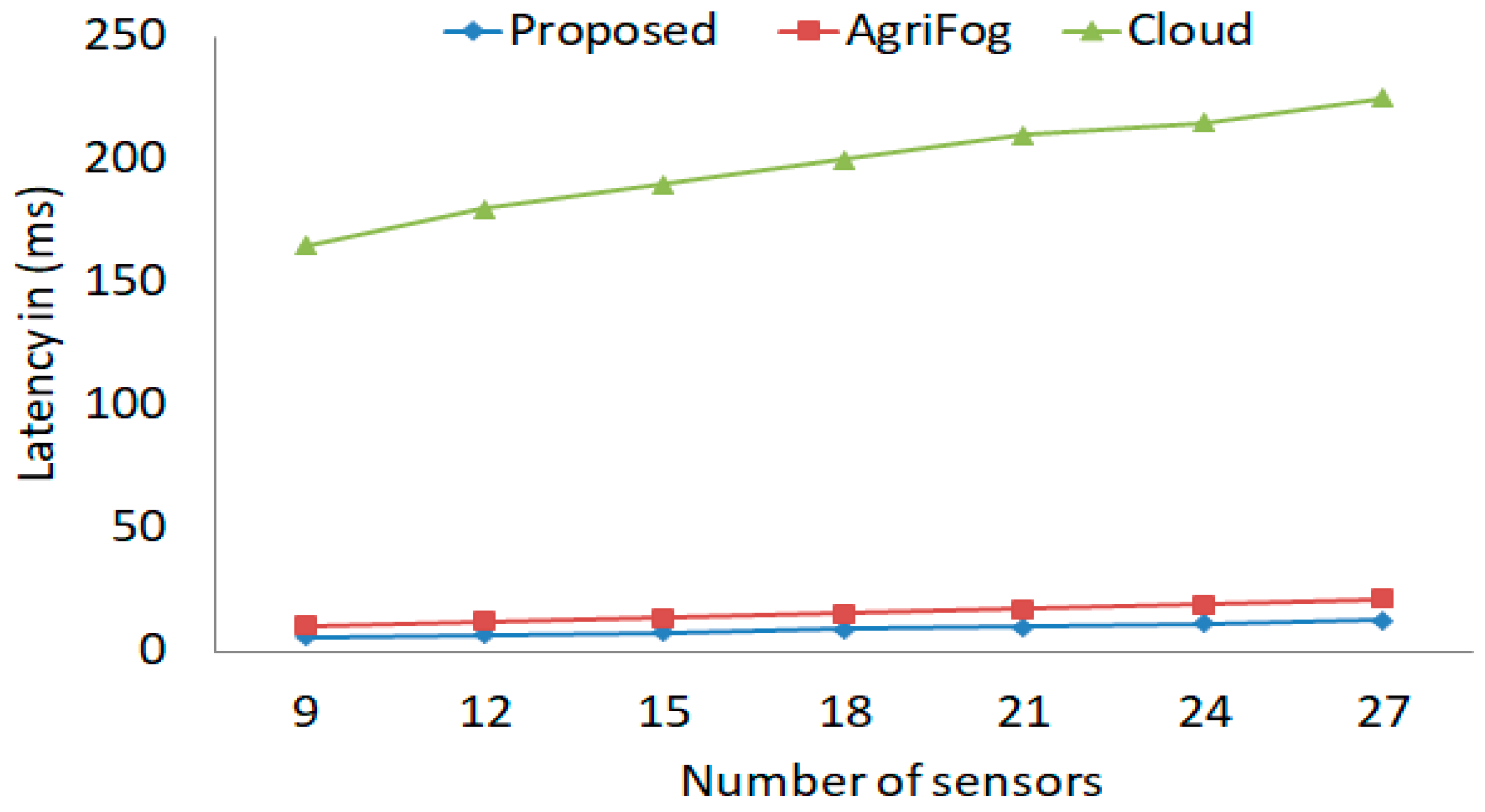
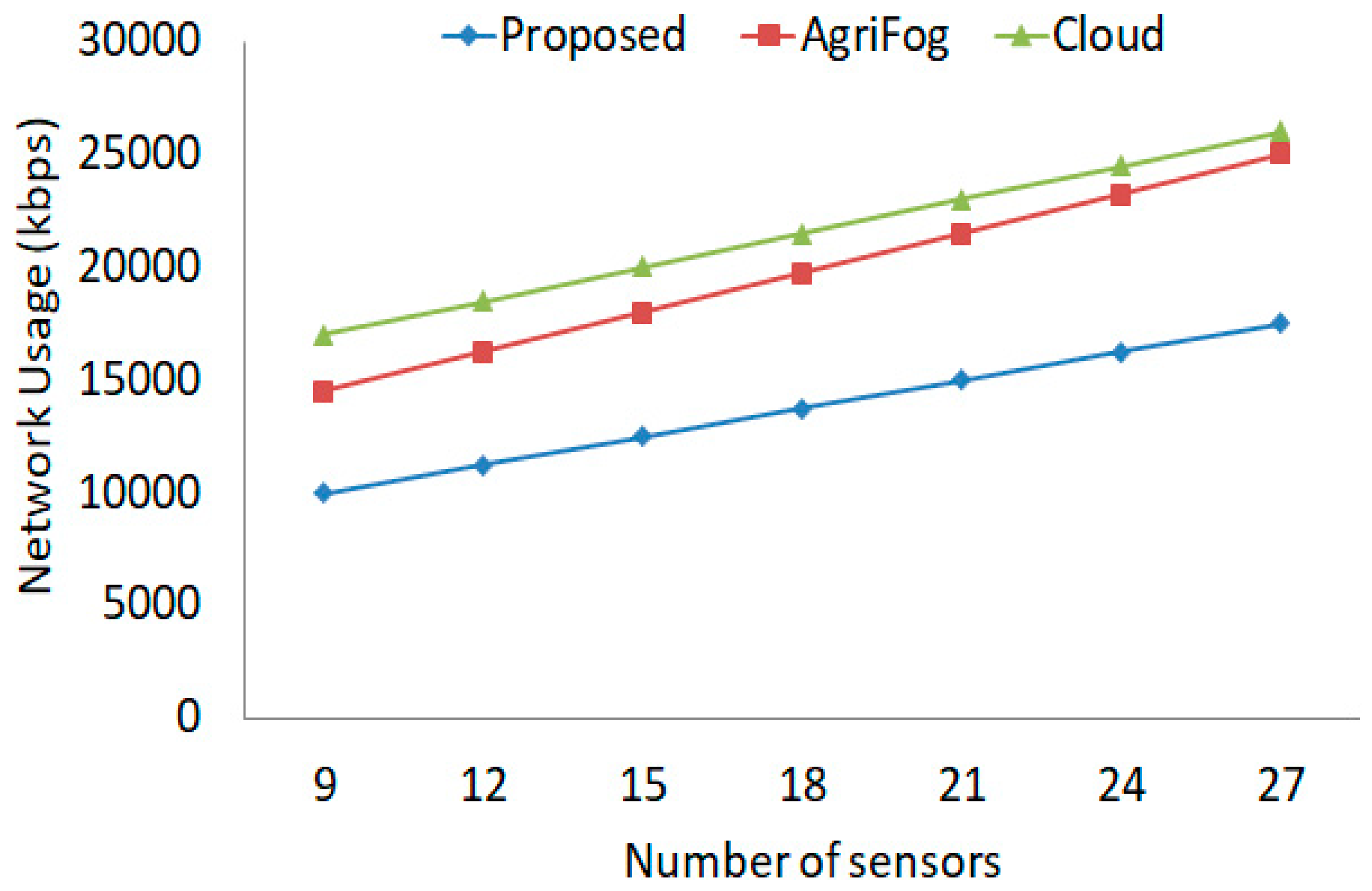
In this phase of testing, the simulator was configured with one Fog Controller Node, three fog nodes, and nine IoT sensors. To assess the system’s performance under varying loads, additional sensors were incrementally added, with the number of connected sensors set to 9, 12, 15, 18, 21, 24, and 27. This configuration aimed to analyze the impact of sensor scalability on key performance metrics, including latency, energy consumption, and network usage.
Figure 5,
Figure 6 and
Figure 7 present the results, highlighting the trends observed for these metrics as the number of sensors increased.
As the number of connected sensors integrated with the robot increases, cloud-based systems encounter significant latency issues due to the long distances data must travel for processing. Similarly, fog-only architectures like AgriFog, lacking centralized coordination through Fog FCNs, can experience overloaded fog nodes, leading to delays that adversely affect latency-sensitive robotic operations such as real-time monitoring and precision irrigation. Our proposed system addresses these challenges by combining the robot’s local processing capabilities with an optimized fog computing framework, effectively distributing the computational load and enhancing overall system performance.
In terms of network usage, the proposed system places computational modules on fog nodes located near the robot’s sensors, reducing network congestion and improving efficiency. In fog-only architectures without FCNs, modules often rely on cloud resources for processing, which increases network congestion and affects response times.
In terms of energy consumption, our proposed system demonstrates superior performance compared to AgriFog by implementing an optimized module placement strategy that considers both urgency and energy requirements. Tasks deemed critical are prioritized for processing with minimal latency, while moderate tasks are managed to achieve a balance between energy usage and latency. Less urgent tasks are scheduled with a focus on minimizing energy consumption while still meeting their required deadlines. This adaptive prioritization effectively reduces overall energy consumption. Furthermore, expanding the number of fog nodes enhances energy efficiency by distributing tasks more effectively across available resources. This reduces individual node workloads, preventing resource strain and optimizing energy use. Additionally, the proximity of fog nodes to data sources minimizes energy-intensive data transmissions, collectively lowering overall system energy consumption. Future work will incorporate real-world energy metrics to provide a more comprehensive evaluation of the system’s overall efficiency and performance.
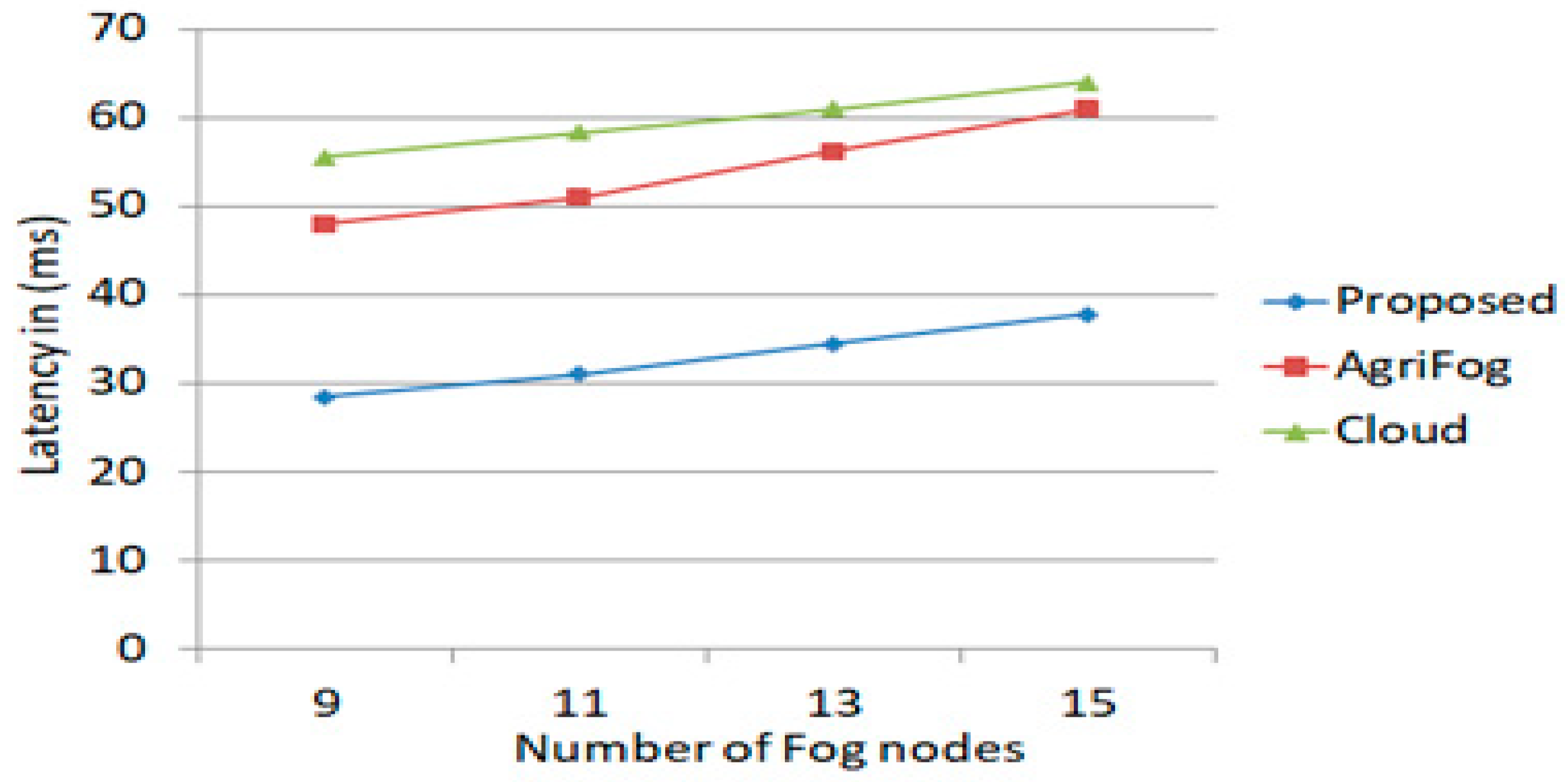
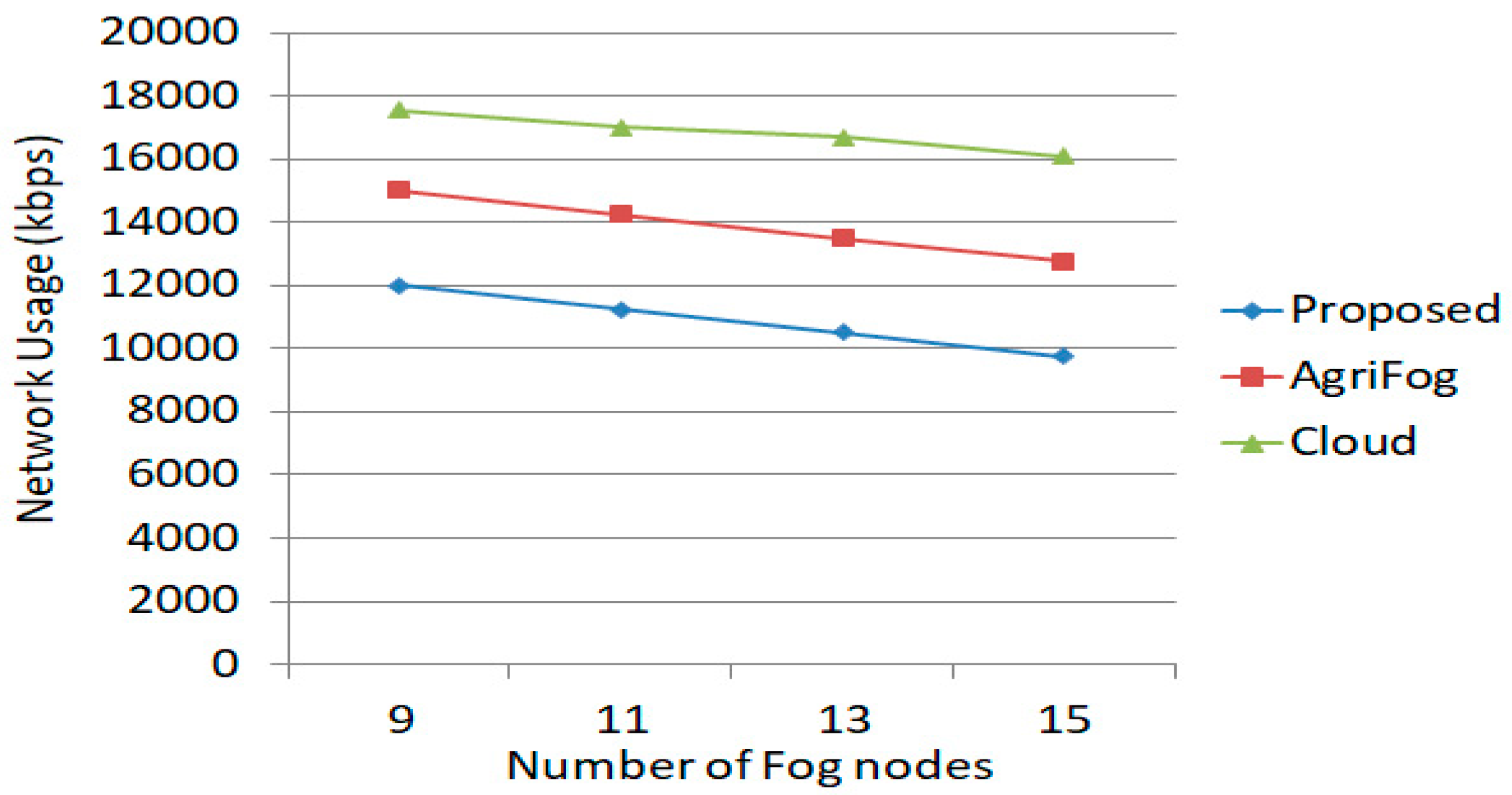
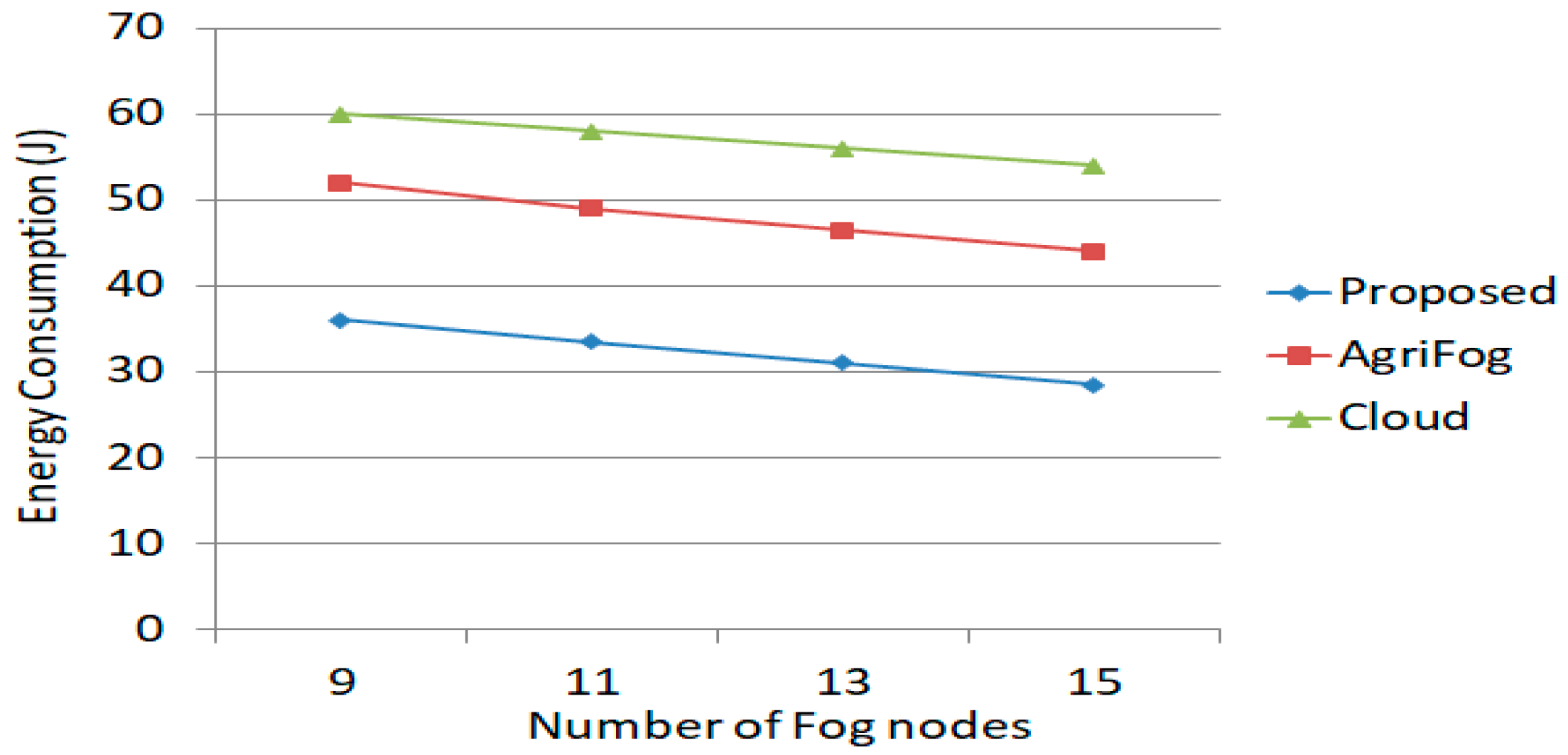
4.2.2. Changing the Number of Fog Devices
In this phase of the experiments, the system included 20 IoT sensors integrated into the robot, and the number of fog nodes was varied between 9, 11, 13, and 15. This variation was used to evaluate the impact of different fog node counts on performance metrics such as latency, energy consumption, and network usage.
As illustrated in
Figure 8,
Figure 9 and
Figure 10, the simulation results demonstrate that increasing the number of fog nodes leads to a notable reduction in latency, energy consumption, and network usage across all evaluated models. This improvement stems from the system’s enhanced ability to allocate tasks to the most appropriate fog nodes, thereby reducing the reliance on cloud offloading. The reduced dependency on cloud resources directly contributes to lower latency, decreased energy usage, and optimized network bandwidth. Additionally, the higher number of fog nodes facilitates a more balanced distribution of computational tasks, promoting efficient resource utilization within the fog-based ecosystem of the robotic smart farming system.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}