
Resource Allocation for UAV-RIS-Assisted NOMA-Based URLLC Systems

 ,
,  , ,
, , 
Abstract
1. Introduction
1.1. Related Work
1.2. Contributions and Novelty
2. System Model
3. Resource Allocation
3.1. Optimizing Power Allocation
3.2. Optimizing RIS Phase Shifts
3.3. Optimizing UAV-RIS Position and Decoding Order
3.4. Overall Algorithm Design and Convergence Analysis
| Algorithm 1 Proposed joint optimization algorithm |
|
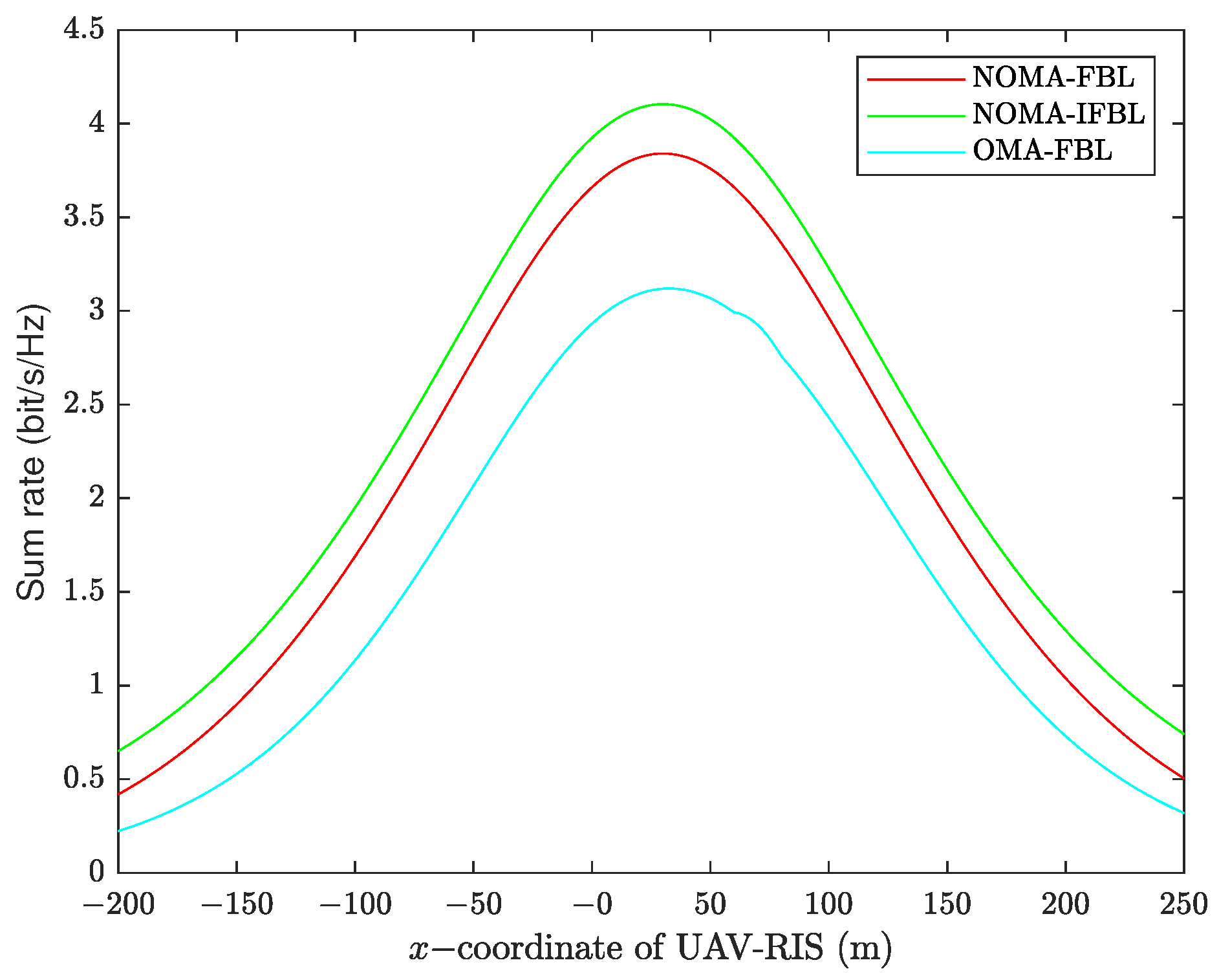
4. Simulation Results
- NOMA-IFBL: In the case of infinite block length, we extend the two-user scenario presented in [28] to accommodate multiple users. The transmission rate is given byfor all , and the optimization variables are consistent with NOMA-FBL.
- NOMA-FBL-RandomRIS: In this case, we optimize power allocation, UAV-RIS position, and NOMA decoding order without optimizing the RIS phase shift.
- NOMA-FBL-Center: In this case, the UAV-RIS position is placed in the center of the BS and users center, with a height of 90 m. Variable optimization is the same as the NOMA-FBL algorithm, except for the UAV-RIS position and decoding order.
- NOMA-IFBL-RandomRIS: In the case, similar to NOMA-FBL-RandomRIS, all variables are optimized except the RIS phase shift.
- OMA-FBL: OMA technology is used in the FBL transmission scheme, similar to [37], and the transmission rate is given bywhere .
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sutton, G.; Zeng, J.; Liu, R. Enabling Technologies for Ultra-Reliable and Low Latency Communications: From PHY and MAC Layer Perspectives. IEEE Commun. Surv. Tutor. 2019, 21, 2488–2524. [Google Scholar] [CrossRef]
- Li, X.; Yao, H.; Wang, J. A near-optimal UAV-aided radio coverage strategy for dense urban areas. IEEE Trans. Veh. Technol. 2019, 38, 9098–9109. [Google Scholar] [CrossRef]
- Wang, Z.; Hong, D.; Fan, Z. Resource allocation for UAV-assisted backscatter communication. EURASIP J. Wirel. Commun. 2022, 202, 104. [Google Scholar] [CrossRef]
- Ranjha, A.; Javed, M.; Srivastava, G. Intercell Interference Coordination for UAV enabled URLLC with perfect/imperfect CSI using cognitive radio. IEEE Open J. Commun. Soc. 2022, 4, 197–208. [Google Scholar] [CrossRef]
- Ranjha, A.; Kaddoum, G.; Dev, K. Facilitating URLLC in UAV-assisted relay systems with multiple-mobile robots for 6G networks: A prospective of agriculture 4.0. IEEE Trans. Ind. Inform. 2022, 18, 4954–4965. [Google Scholar] [CrossRef]
- Di, H.; Zhu, X.; Liu, Z. Joint Blocklength and Trajectory Optimizations for URLLC-enabled UAV Relay System. IEEE Commun. Lett. 2024, 28, 118–122. [Google Scholar] [CrossRef]
- Elwekeil, M.; Zappone, A.; Buzzi, S. Power control in cell-free massive MIMO networks for UAVs URLLC under the finite blocklength regime. IEEE Trans. Commun. 2023, 71, 1126–1140. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, N.; Chang, Z.; Wang, X. UAV-aided secure short-packet data collection and transmission. IEEE Trans. Commun. 2023, 71, 2023. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent reflecting surface-aided wireless communications: A tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Hu, Y.; Li, D.; Wang, J. Pain without gain: Destructive beamforming from a malicious RIS perspective in IoT networks. IEEE IoT J. 2023, 11, 7619–7629. [Google Scholar] [CrossRef]
- Deshpande, R.; Katwe, M.; Singh, K.; Dinget, Z. Resource allocation design for spectral-efficient URLLC using RIS-aided FD-NOMA system. IEEE Wirel. Commun. Lett. 2023, 12, 1209–1213. [Google Scholar] [CrossRef]
- Hashemi, R.; Ali, S.; Mahmood, N. Deep reinforcement learning for practical phase-shift optimization in RIS-aided MISO URLLC systems. IEEE IoT J. 2022, 10, 8931–8943. [Google Scholar] [CrossRef]
- Abughalwa, M.; Tuan, H.; Nguyen, N.; Poor, V.; Hanzo, L. Finite-blocklength RIS-aided transmit beamforming. IEEE Trans. Veh. Technol. 2022, 71, 12374–12379. [Google Scholar] [CrossRef]
- Soleymani, M.; Santamaria, I.; Jorswieck, E.; Clerckx, B. Optimization of rate-splitting multiple access in beyond diagonal RIS-assisted URLLC systems. IEEE Trans. Wirel. Commun. 2024, 23, 5063–5078. [Google Scholar] [CrossRef]
- Ren, H.; Wang, K.; Pan, C. Intelligent reflecting surface-aided URLLC in a factory automation scenario. IEEE Trans. Commun. 2021, 70, 707–723. [Google Scholar] [CrossRef]
- Cao, K.; Tang, Q. Energy Efficiency Maximization for RIS-Assisted MISO Symbiotic Radio Systems Based on Deep Reinforcement Learning. IEEE Commun. Lett. 2024, 28, 88–92. [Google Scholar] [CrossRef]
- Wu, M.; Zhu, S.; Li, C.; Zhu, J.; Chen, Y.; Liu, X.; Liu, R. UAV-Mounted RIS-Aided Mobile Edge Computing System: A DDQN-Based Optimization Approach. Drones 2024, 8, 184. [Google Scholar] [CrossRef]
- Cheng, T.; Wang, B.; Cao, K.; Dong, R.; Diao, D. IRS-Assisted Secure UAV Communication System for Multiuser With Hardware Impairments. IEEE Syst. J. 2023, 17, 4946–4957. [Google Scholar] [CrossRef]
- Bansal, A.; Agrawal, N.; Singh, K.; Li, P.; Mumtaz, S. RIS selection scheme for UAV-based multi-RIS-aided multiuser downlink network with imperfect and outdated CSI. IEEE Trans. Commun. 2023, 71, 4650–4664. [Google Scholar] [CrossRef]
- Qin, X.; Song, Z.; Hou, T.; Wang, J.; Sun, X. Joint optimization of resource allocation, phase shift and UAV trajectory for energy-efficient RIS-assisted UAV-enabled MEC systems. IEEE Trans. Green Commun. Netw. 2023, 7, 1778–1792. [Google Scholar] [CrossRef]
- Singh, S.; Agrawal, K.; Singh, K.; Li, P.; Ding, Z. NOMA enhanced hybrid RIS-UAV-assisted full-duplex communication system with imperfect SIC and CSI. IEEE Trans. Commun. 2022, 70, 7609–7627. [Google Scholar] [CrossRef]
- Lai, H.; Li, D.; Xu, F.; Wang, X.; Ning, J.; Hu, Y.; Duo, B. Optimization of Full-Duplex UAV Secure Communication with the Aid of RIS. Drones 2023, 7, 591. [Google Scholar] [CrossRef]
- Pang, X.; Zhao, N.; Tang, J.; Wu, C.; Niyato, D.; Wong, K. IRS-assisted secure UAV transmission via joint trajectory and beamforming design. IEEE Trans. Commun. 2022, 70, 1140–1152. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhao, J.; Zhang, R.; Yang, L. Downlink Transmissions of UAV-RIS-Assisted Cell-Free Massive MIMO Systems: Location and Trajectory Optimization. Sensors 2024, 24, 4064. [Google Scholar] [CrossRef]
- Ranjha, A.; Kaddoum, G. URLLC facilitated by mobile UAV relay and RIS: A joint design of passive beamforming, blocklength, and UAV positioning. IEEE IoT J. 2021, 8, 4618–4627. [Google Scholar] [CrossRef]
- Wei, L.; Wang, K.; Pan, C.; Elkashlan, M. Average Error Probability for UAV-RIS Enabled Short Packet Communications. IEEE Trans. Veh. Technol. 2024, 73, 2912–2917. [Google Scholar] [CrossRef]
- Singh, S.; Agrawal, K.; Singh, K.; Clerckx, B.; Li, B. RSMA for hybrid RIS-UAV-aided full-duplex communications with finite blocklength codes under imperfect SIC. IEEE Trans. Wirel. Commun. 2023, 22, 5957–5975. [Google Scholar] [CrossRef]
- Zhao, H.; Kong, Z.; Huang, H. Air reconfigurable intelligent surface enhanced multi-user noma system. IEEE IoT J. 2024, 11, 29–39. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Ren, H.; Zhang, Z.; Peng, Z.; Li, L.; Pan, C. Energy minimization in RIS-assisted UAV-enabled wireless power transfer systems. IEEE IoT J. 2023, 10, 5794–5809. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Poor, V. Intelligent reflecting surface enhanced multi-UAV NOMA networks. IEEE J. Sel. Areas Commun. 2021, 39, 3051–3066. [Google Scholar] [CrossRef]
- Polyanskiy, Y.; Poor, V.; Verdú, S. Channel coding rate in the finite blocklength regime. IEEE Trans. Inf. Theory 2010, 56, 2307–2359. [Google Scholar] [CrossRef]
- Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Wu, Q.; Zhang, R. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef]
- Luo, Z.; Ma, K.; So, A.; So, A.M.C. Semidefinite relaxation of quadratic optimization problems. IEEE Signal Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]
- Xu, D.; Zhao, H.; Zhu, H. Resource allocation for secure short packet communications in wireless powered IoT networks. IEEE Trans. Veh. Technol. 2023, 72, 11000–11005. [Google Scholar] [CrossRef]
- Amjad, M.; Musavian, L.; Aissa, S. NOMA versus OMA in finite blocklength regime: Link-layer rate performance. IEEE Trans. Veh. Technol. 2020, 69, 16253–16257. [Google Scholar] [CrossRef]
- Adam, A.; Wang, Z.; Wan, X.; Xu, Y.; Duo, B. Energy-Efficient Power Allocation in Downlink Multi-Cell Multi-Carrier NOMA: Special Deep Neural Network Framework. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 1770–1783. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum transmit power | 30 dBm |
| Channel power at | 30 dB |
| LoS probability threshold | |
| Noise power | |
| Element spacing of RIS | |
| Number of IRS reflecting elements M | 40 |
| Constants related to the environment | |
| Packet error rate | |
| Minimum user rate | 0.1 |
| packet length N | 1000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Huang, K.; Zheng, Q.; Duo, B.; Huo, L.; Yang, M. Resource Allocation for UAV-RIS-Assisted NOMA-Based URLLC Systems. Drones 2024, 8, 301. https://doi.org/10.3390/drones8070301
Wang Z, Huang K, Zheng Q, Duo B, Huo L, Yang M. Resource Allocation for UAV-RIS-Assisted NOMA-Based URLLC Systems. Drones. 2024; 8(7):301. https://doi.org/10.3390/drones8070301
Chicago/Turabian StyleWang, Zhengqiang, Kunhao Huang, Qinghe Zheng, Bin Duo, Liuwei Huo, and Mingqiang Yang. 2024. "Resource Allocation for UAV-RIS-Assisted NOMA-Based URLLC Systems" Drones 8, no. 7: 301. https://doi.org/10.3390/drones8070301
APA StyleWang, Z., Huang, K., Zheng, Q., Duo, B., Huo, L., & Yang, M. (2024). Resource Allocation for UAV-RIS-Assisted NOMA-Based URLLC Systems. Drones, 8(7), 301. https://doi.org/10.3390/drones8070301